PowerPoint
Werbung

Dynamische Programmierung
Das Prinzip „Teile und Herrsche“ diente als Grundlage für
die Entwicklung vieler der untersuchten Algorithmen.
Um ein umfangreiches Problem zu lösen, zerlege man es in
kleinere Probleme, die unabhängig voneinander gelöst werden
können.
In der dynamischen Programmierung wird dieses Prinzip bis
zum Extrem weiterentwickelt: Wenn nicht bekannt ist,
welche kleineren Probleme zu lösen sind, löst man einfach
alle und speichert dann die Ergebnisse zum Zwecke der
späteren Verwendung bei der Lösung größerer Probleme.
Dieser Ansatz ist in „Operations Research“ weit verbreitet.
Hierbei bezieht sich der Begriff „Programmierung“ auf den
Prozess der Formulierung der Bedingungen eines Problems,
um das Verfahren anwendbar zu machen.
G.Heyer
1
Algorithmen und Datenstrukturen 2
Prinzip und Voraussetzung
1. Charakterisiere den Lösungsraum und die Struktur der
intendierten optimalen Lösung
2. Definiere rekursiv, wie sich eine optimale Lösung (und der
ihr zugeordnete Wert) aus kleineren optimalen Lösungen
(und deren Werte) zusammensetzt.
3. Konzipiere den Algorithmus in einer bottom-up Weise so,
dass für n=1,2,3, ... tabellarisch optimale Teillösungen (und
deren zugeordnete Werte) gefunden werden. Beim Finden
einer bestimmten optimalen Teillösung der Größe k>1 ist auf
alle optimalen Teillösungen der Größe < k zurückzugreifen.
Voraussetzung: Die optimale Lösung für ein Problem der
Größe n setzt sich aus optimalen Teillösungen kleinerer
Größe zusammen. (Bellmannsches Optimalitätsprinzip)
G.Heyer
2
Algorithmen und Datenstrukturen 2
Bei der Anwendung der dynamischer Programmierung können
zwei Schwierigkeiten auftreten:
- Erstens muss es nicht immer möglich sein, die Lösungen
kleinerer Probleme so zu kombinieren, dass sich die
Lösung eines größeren Problems ergibt.
- Zweitens kann die Anzahl der zu lösenden Probleme
unvertretbar groß sein.
Es ist noch nicht gelungen, genau anzugeben, welche
Probleme mit Hilfe der dynamischen Programmierung in
effizienter Weise gelöst werden können; es gibt viele
„schwierige“ Probleme, für die sie nicht anwendbar zu sein
scheint, aber auch viele „leichte“ Probleme, für die sie
weniger effizient ist als Standardalgorithmen.
G.Heyer
3
Algorithmen und Datenstrukturen 2
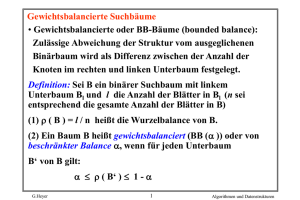
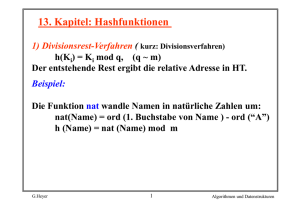
Das Produkt mehrerer Matrizen
Ein klassischer Anwendungsfall der dynamischen
Programmierung ist das Problem der Minimierung des
Rechenaufwands, der für die Multiplikation einer Reihe von
Matrizen unterschiedlicher Dimension erforderlich ist.
a11 a12
c11
b11 b12 b13
a21 a22
e11 e12
f11 f12 f13
c21 d11 d12
a31 a32
b21 b22 b23
e21 e22
f21 f22 f23
c31
a41 a42
4x2
2x3
3x1
1x2
2x2
2x3
Ziel: Multiplikation der 6 Matrizen
Natürlich muss die Anzahl der Spalten in einer Matrix stets
mit der Anzahl der Zeilen in der folgenden Matrix
übereinstimmen, damit die Multiplikation ausführbar ist.
G.Heyer
4
Algorithmen und Datenstrukturen 2
Die Gesamtanzahl der erforderlichen Skalar-Multiplikationen
hängt von der Reihenfolge ab, in der die Matrizen multipliziert
werden.
Im Beispiel könnte man von links nach rechts vorgehen:
AxB
24 Skalar-Multipl. neue Matrix
M1 4 x 3
M1 x C
12 Skalar-Multipl. neue Matrix
M2 4 x 1
M2 x D
8 Skalar-Multipl. neue Matrix
M3 4 x 2
...
nach
84 Skalar-Multipl. Ergebnismatrix
4x3
Geht man statt dessen von rechts nach links vor, erhält man
als Ergebnis die gleiche Matrix der Dimension 4 x 3 nach nur
69 Skalarmultiplikationen .
Es sind auch noch viele andere Reihenfolgen möglich.
G.Heyer
5
Algorithmen und Datenstrukturen 2
Die Reihenfolge der Multiplikation kann durch das Setzen
von Klammern ausgedrückt werden, z. B. entspricht die
Reihenfolge von links nach rechts dem Ausdruck
( ( ( ( ( AB ) C ) D ) E ) F )
und die Reihenfolge von rechts nach links dem Ausdruck
( A ( B ( C ( D ( EF ) ) ) ) ).
Jedes zulässige Setzen von Klammern führt zum richtigen
Ergebnis, doch wann ist die Anzahl der Skalar-Multiplikation
am kleinsten?
Wenn große Matrizen auftreten, können beträchtliche
Einsparungen erzielt werden:
Wenn z. B. die Matrizen B, C und F im obigen Beispiel eine
Dimension von 300 statt von 3 besitzen, sind bei der
Reihenfolge von links nach rechts 6024 Skalar-Multipl.
erforderlich, bei der Reihenfolge von rechts nach links
dagegen die astronomische Zahl von 274 200 Multiplikationen
auszuführen.
G.Heyer
6
Algorithmen und Datenstrukturen 2
Demnach ergibt die Multiplikation einer Matrix der
Dimension p x q mit einer Matrix der Dimension q x r eine
Matrix der Dimension p x r, wobei jedes Element mit Hilfe
von q Multiplikationen berechnet wird, so dass insgesamt
p q r Multiplikationen ausgeführt werden müssen.
Allgemeiner Fall: N Matrizen sind miteinander zu
multiplizieren:
M1 M2 M3 ... Mn
wobei die Matrizen der Bedingung genügen, dass
Mi für 1 i < N ri Zeilen und ri+1 Spalten ausweist.
Ziel: Diejenigen Reihenfolge der Multiplikation der
Matrizen zu finden, für die die Gesamtzahl der
auszuführenden Skalar-Multiplikationen minimal wird.
G.Heyer
7
Algorithmen und Datenstrukturen 2
Die Anzahl der Reihenfolgen ist eine kombinatorische
Funktion, die Katalanische Zahl genannt wird; die Anzahl der
Möglichkeiten, N Variablen zu klammern, beträgt ungefähr
4 N-1 / N N
Die Lösung des Problems mit Hilfe der dynamischen
Programmierung besteht darin, „von unten nach oben“
vorzugehen und berechnete Lösungen kleiner Teilprobleme zu
speichern, um eine wiederholte Rechnung zu vermeiden.
Um die beste Möglichkeit zu ermitteln, M1M2M3 zu
multiplizieren, entnehmen wir zuerst der gespeicherten
Tabelle die Kosten der Berechnung von M1M2 und addieren
dann die Kosten der Multiplikation dieses Ergebnisses mit M3
dazu. Diese Summe wird mit den Kosten verglichen, die
enstehen, wenn zuerst die Multiplikation M2M3 ausgeführt
und dann mit M1 multipliziert wird, was auf die gleiche Weise
berechnet werden kann.
G.Heyer
8
Algorithmen und Datenstrukturen 2
Die kleinere der beiden Summen wird gespeichert und ebenso
wird mit allen anderen Tripeln verfahren. Anschließend
berechnet man unter Berücksichtigung aller Informationen
die beste Möglichkeit Quadrupel Matrizen zu multiplizieren.
Indem man in dieser Weise fortfährt, findet man schließlich
die beste Möglichkeit, alle Matrizen miteinander zu
multiplizieren.
Für 1 j N - 1 ermittelt man die minimalen Kosten der
Berechnung von Mi M i+1 . . . M i + j‘ indem man für 1 i N-j
und für jedes k zwischen i und i + j die Kosten der
Berechnung von M i M i + 1 . . . Mk-1 ermittelt und dann die
Kosten addiert, die bei der Multiplikation dieser Ergebnisse
entstehen. Da man stets eine Gruppe in zwei kleinere Gruppen
zerlegt, braucht man die minimalen Kosten für die beiden
Gruppen nur aus einer Tabelle zu entnehmen und nicht neu
zu berechnen.
G.Heyer
9
Algorithmen und Datenstrukturen 2
Dies führt zu folgendem Programm:
for ( i = 1 ; i <= N ; i++ )
for ( j = i + 1 ; j < = N ; j++ ) cost [i] [j] = INT_MAX ;
for ( i = 1 ; i <= N ; i++ ) cost [i] [i] = 0 ;
for ( j = 1 ; j < N ; j++ )
for ( i = 1 ; i <= N - j ; i++ )
for ( k = i + 1 ; k <= i + j ; k++ )
{ t = cost [i][k - 1] + cost [k][i+j] + r[i] * r[k] * r[i+j+1];
if ( t < cost [i][i+j] )
{ cost [i][i+j] = t ; best [i][i+j] = k ; }
}
G.Heyer
10
Algorithmen und Datenstrukturen 2
cost [l][r] gibt die minimalen Kosten der Berechnung von
Ml M l+1 . . . Mr an;
die Kosten für die erste oben angegebene Gruppe betragen
cost [i][k-1],
die Kosten für die zweite Gruppe cost [k][i + j] .
Die Kosten für die abschließenden Multiplikationen lassen
sich leicht bestimmen: Mi Mi+1 . . M k-1 ist eine Matrix der
Dimension r i x r k‘ und M k M k+1 ... M i+j ist eine Matrix der
Dimension rk x r i+j+1, so dass die Kosten der Multiplikation
dieser beiden Matrizen ri rk r i+j+1 betragen. Auf diese Weise
berechnet das Programm cost [i][i+j] für 1 i N - j, wobei
j von 1 bis N-1 wächst. Wenn man j = N - 1 erreicht
(und i = 1), hat man die gesuchten minimalen Kosten der
Berechnung M1 M2 . . . MN gefunden.
G.Heyer
11
Algorithmen und Datenstrukturen 2
Die getroffenen Entscheidungen werden in einem getrennten
Feld best registriert, um sie später, wenn die tatsächliche
Folge der Multiplikationen erzeugt werden soll, wieder
bestimmen zu können.
Das folgende Programm stellt die Implementation dieses
Prozesses der Ermittlung der optimalen Anordnung der
Klammern anhand der mit Hilfe des obigen Programms
berechneten Felder cost und best dar.
order (int i, int j )
{
if (i == j ) printf ( „%c“ , name ( i ) ) ;
else { printf ( „(„ ) ;
order ( i, best [i][j] -1) ; order (best[i][j], j );
printf ( „)“ ) ;
}
}
G.Heyer
12
Algorithmen und Datenstrukturen 2
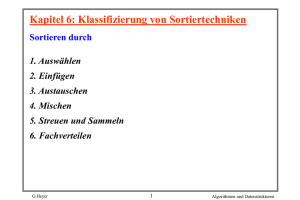
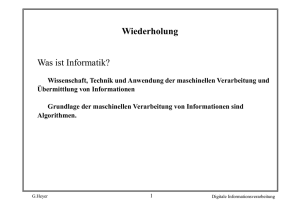
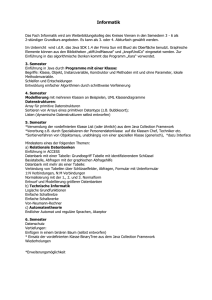
Lösung des Problems der Multiplikation mehrerer Matrizen
A
B
C
D
E
F
24
14
22
26
36
[A][B]
B
[A][BC] [ABC][D] [ABC][DE] [ABC][DEF]
6
[B][C]
C
10
[BC][D]
6
[C][D]
D
E
14
[BC][DE]
22
[BC][DEF]
10
19
[C][DE]
[C][DEF]
4
10
[D][E]
[DE][F]
12
[E][F]
G.Heyer
13
Algorithmen und Datenstrukturen 2
Beschreibung zur Tabelle
Sie zeigt den Ablauf der oben gezeigten Programme für das
angegebene Beispiel.
Sie gibt die Gesamtkosten und die optimale „letzte“
Multiplikation für jede Teilfolge in der Liste der Matrizen an.
Z. B. besagt die Eintragung in der Zeile A und der Spalte F,
dass 36 Skalar-Multiplikationen erforderlich sind, um die
Matrizen A bis F zu multiplizieren, und dass dies erreicht
werden kann, indem A bis C auf optimale Weise multipliziert
werden, dann D bis F auf optimale Weise multipliziert werden
und danach die erhaltenen Matrizen miteinander multipliziert
werden. Nur D ist in dem Feld best enthalten.
Für obiges Beispiel ist die ermittelte Anordnung der
Klammern ( (A ( BC ) ) ( ( DE ) F ) , wofür nur 36 SkalarMultiplikationen benötigt werden.
Für das Beispiel, wo die Dimension von 3 auf 300 geändert
wurde, ist die gleiche Anordnung der Klammern optimal, wobei
hier 2412 Skalar-Multiplikationen erforderlich sind.
G.Heyer
14
Algorithmen und Datenstrukturen 2
Eigenschaft:
Mit Hilfe der dynamischen Programmierung kann das
Problem der Multiplikation mehrerer Matrizen in einer zu N3
proportionalen Zeit und mit einem zu N2 proportionalen
Speicheraufwand gelöst werden.
G.Heyer
15
Algorithmen und Datenstrukturen 2
Beispiel: Traveling Salesman Problem (TSP)
Gegeben: n Städte, Entfernungsmatrix M = (mij), mij
Entfernung von Stadt i nach Stadt j.
Gesucht: Rundreise über alle Städte mit minimaler Länge,
also Permutation : {1,...,n} -> {1,...,n} so daß
n-1
c(p) = S m(i),(i+1) + m(n),(1)
i=1
minimal.
NP-vollständig (Rechenzeit mit großer Sicherheit
exponentiell)
Naiver Algorithmus: alle (n-1)! viele Reihenfolgen
betrachten.
G.Heyer
16
Algorithmen und Datenstrukturen 2
Dynamische Programmierung:
Sei g (i,S) Länge des kürzesten Weges von i über jede Stadt in
S (jeweils genau 1 Besuch) nach Stadt
1. Lösung des TSP also g(1, {2,...,n}).
(Stadt 1 kann beliebig gewählt werden, da Rundreise
gesucht wird)
Es gilt:
g(i,S) =
G.Heyer
mi1
minjS (mij + g ( j, S -{ j } )
17
falls S = {}
sonst
Algorithmen und Datenstrukturen 2
Algorithmus konstruiert Tabelle :
for ( i = 2 ; i = n; i++) g[i,{}] = mi1
for ( k = 1; k = n-2 ; k++ )
for (S, |S| = k, 1S )
for (i {2,...,n} - S )
Berechne g[i,S] gemäß Formel
Berechne g[1,{ 2,...,n } gemäß Formel
Komplexität: Tabellengröße * Aufwand Tabelleneintrag
Größe: < n 2n (Anzahl der i's mal Anzahl betrachtete
Teilmengen)
Tabelleneintrag: Suche nach Minimum unter j aus S: O(n)
Insgesamt: O(n22n), deutlich besser als (n-1)! .
G.Heyer
18
Algorithmen und Datenstrukturen 2
Beispiel: 4 Städte, symmetrische Entfernungen, M:
1
2
3
4
1
0
4
9
8
2
4
0
12
2
3
9
12
0
10
4
8
2
10
0
Tabelleneinträge:
g[2,{}] = 4
g[3,{}] = 9
g[4,{}] = 8
g[2,{3}] = 12 + 9
g[2,{4}] = 2 + 8
g[3,{2}] = 12 + 4
g[3,{4}] = 10 + 9
g[4,{2}] = 2 + 4
g[4,{3}] = 10 + 9
G.Heyer
= 21
= 10
= 16
= 19
=6
= 19
19
Algorithmen und Datenstrukturen 2
g[2,{3,4}] = min(m23 + g[3,{4}] , m24 + g[4,{3}] ) = 21
g[3,{2,4}] = min(m32 + g[2,{4}] , m34 + g[4,{2}] ) = 16
g[4,{2,3}] = min(m42 + g[2,{3}] , m43 + g[3,{2}] ) = 23
g[1,{2,3,4}] = min(m12 + g[2,{3,4}] , m13 + g[3,{2,4}], m14 +
g[4,{2,3}])
= 25
Lösung: 1, 2, 4, 3, 1
G.Heyer
20
Algorithmen und Datenstrukturen 2
Das Rucksack-Problem
Ein Dieb, der einen Safe ausraubt, findet in ihm N Typen von
Gegenständen unterschiedlicher Größe und unterschiedlichen
Werts, hat aber nur einen kleinen Rucksack der Größe M zur
Verfügung, um die Gegenstände zu tragen.
Das Rucksack-Problem besteht darin, diejenige Kombination
von Gegenständen zu finden, die der Dieb für seinen
Rucksack auswählen sollte, so dass der Gesamtwert der von
ihm geraubten Gegenstände maximal wird.
Beispiel: Der Rucksack besitzt ein Fassungsvermögen von 17,
der Safe enthält viele Gegenstände mit unterschiedlichen
Größen und den angegebenen Werten.
(Die Bezeichnungen der Gegenstände werden im Programm
in Indizes umgewandelt.)
G.Heyer
21
Algorithmen und Datenstrukturen 2
Abbildung zum Rucksack-Problem
3
4
7
8
9
Wert
4
Bezeichnung A
5
B
10
C
11
D
13
E
Größe
Der Dieb kann dann 5 Gegenstände A ( jedoch nicht 6)
mitnehmen, so dass die gesamte Beute den Wert 20 hat,
oder er kann seinen Rucksack mit einem D und einem E
füllen, was einen Gesamtwert von 24 ergibt, oder er kann
andere Kombinationen ausprobieren. Doch für welche
Kombination wird der Gesamtwert maximal?
G.Heyer
22
Algorithmen und Datenstrukturen 2
Bedeutung des Rucksack-Problems auch im
kommerziellen Bereich:
z. B. ist es für eine Reederei von Interesse, die beste
Möglichkeit zu kennen, wie ein Lastkraftwagen oder ein
Transportflugzeug mit Gütern für die Verschiffung beladen
werden kann.
Bei solchen Anwendungsfällen können auch andere
Varianten des Problems auftreten: Es könnte z. B. sein, dass
von jedem Gegenstand nur eine begrenzte Anzahl
vorhanden ist.
Für viele solche Varianten ist der gleiche Ansatz geeignet.
Zur Lösung des Rucksack-Problems mit Hilfe der
dynamischen Programmierung berechnet man die beste
Kombination für alle Größen eines Rucksacks bis M.
G.Heyer
23
Algorithmen und Datenstrukturen 2
Diese Berechnung kann in sehr effizienter Weise realisiert
werden, indem die Operationen in einer zweckmäßigen
Reihenfolge ausgeführt werden:
for ( j = 1 ; j <= N ; j ++ )
{
for ( i = 1 ; i <= M ; i++ )
if ( i >= size [ j ] )
if ( cost [i] < cost [i - size [j] ] + val [j] )
{
cost [i] = cost [i - size [j]] + val [j];
best [i] = j ;
}
}
G.Heyer
24
Algorithmen und Datenstrukturen 2
In diesem Beispiel ist:
cost [i]
der größte Wert, der mit einem Rucksack mit
dem Fassungsvermögen i erzielt werden kann,
best [i]
ist das letzte Element, das hinzugefügt wurde, um
das Maximum zu realisieren.
Zuerst berechnet man für alle Größen des Rucksacks den
maximalen Wert, wenn nur Elemente vom Typ A verwendet
werden, danach berechnet man den maximalen Wert, wenn
nur Elemente A und B verwendet werden usw. Die Lösung
reduziert sich auf eine einfache Berechnung von cost [i].
Annahme: Auswahl des Elements j für den Rucksack, dann
wäre der beste Gesamtwert, der erzielt werden könnte
val [j] (für das Element) + cost [i - size [j]] (um den Rest des
Rucksacks aufzufüllen) . Wenn dieser Wert den besten Wert
übersteigt, der ohne ein Element j erreicht werden kann,
aktualisiert man cost [i] und best [i]; andernfalls lässt man
diese Größen unverändert.
G.Heyer
25
Algorithmen und Datenstrukturen 2
Lösung des Rucksack-Problems
k
3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
j=1
cost [k]
4 4 4 8 8 8 12 12 12 16 16 16 20 20 20
best [k]
AAAAAAAA A A A A A A A
j=2
cost [k]
4 5 5 8 9 10 12 13 14 16 17 18 20 21 22
best [k]
AB B A B B A B B A B B A B B
j=3
cost [k]
4 5 5 8 10 10 12 14 15 16 18 20 20 22 24
best [k]
AB B A C D A C C A C C D C C
j=4
cost [k]
4 5 5 8 10 11 12 14 15 16 18 20 21 22 24
best [k]
A B B A C D A C C A C C D C C
j=5
cost [k]
4 5 5 8 10 11 13 14 15 17 18 20 21 23 24
best [k]
A B B A C D E C C E C C D E C
G.Heyer
26
Algorithmen und Datenstrukturen 2
Erklärung zur Lösung des Beispiels
Das erste Zeilenpaar zeigt den maximalen Wert (den Inhalt
der Felder cost und best ), wenn nur Elemente A benutzt
werden;
das zweite Zeilenpaar zeigt den maximalen Wert, wenn nur
Elemente A und B verwendet werden, usw.
Der höchste Wert, der mit einem Rucksack der Größe 17
erreicht werden kann, ist 24.
Im Verlaufe der Berechnung dieses Ergebnisses hat man
auch viele Teilprobleme gelöst, z. B. ist der größte Wert, der
mit einem Rucksack der Größe 16 erreicht werden kann,
22, wenn nur Elemente A, B und C verwendet werden.
Der tatsächliche Inhalt des optimalen Rucksacks kann mit
Hilfe des Feldes best berechnet werden. Per Definition ist
best[M] in ihm enthalten, und der restliche Inhalt ist der
gleiche wie im optimalen Rucksack der Größe
M - size [best [M]]
usw.
G.Heyer
27
Algorithmen und Datenstrukturen 2
Eigenschaft:
Für die Lösung des Rucksack-Problems mit Hilfe der
dynamischen Programmierung wird eine zu N M
proportionale Zeit benötigt.
Somit kann das Rucksack-Problem leicht gelöst werden,
wenn M nicht groß ist; für große Fassungsvermögen kann
die Laufzeit jedoch unvertretbar groß werden.
Eine grundlegende Schwierigkeit ist es, das das Verfahren
nicht anwendbar ist, wenn M und die Größen oder Werte
z. B. reelle Zahlen anstatt ganzer Zahlen sind.
Wenn jedoch die Fassungsvermögen sowie die Größen und
Werte der Gegenstände ganze Zahlen sind, so gilt das
grundlegende Prinzip, dass optimale Entscheidungen nicht
geändert werden müssen, nachdem sie einmal getroffen
wurden.
Jedesmal, wenn dieses allgemeine Prinzip zur Anwendung
gebracht werden kann, ist die dynamische Programmierung
anwendbar.
G.Heyer
28
Algorithmen und Datenstrukturen 2
Optimale binäre Suchbäume
Bei vielen Suchanwendungen ist bekannt, dass die
Suchschlüssel mit stark variierenden Häufigkeiten auftreten
können, z. B. wird ein Programm, das die Schreibweise von
Wörtern in einem deutschen Text prüft, wahrscheinlich viel
öfter nach Wörtern wie „und“ und „der“ suchen, als nach
Wörtern wie „dynamische“ und „Programmierung“.
In ähnlicher Weise wird ein C-Compiler sicher weit häufiger
Schlüsselwörter wie „if“ und „for“ aufsuchen, als „goto“ oder
„ main“.
Wenn Suche in einem Binärbaum angewandt wird, ist es
vorteilhaft, die am häufigsten gesuchten Schlüssel in der Nähe
der Spitze des Baumes anzuordnen.
Um zu bestimmen, wie die Schlüssel im Baum anzuordnen
sind, so dass die Gesamtkosten der Suche minimiert werden,
kann ein Algorithmus der dynamischen Programmierung
benutzt werden.
G.Heyer
29
Algorithmen und Datenstrukturen 2
Jeder Knoten im binären Suchbaum ist mit einer ganzen Zahl
gekennzeichnet, von der angenommen wird, dass sie der
Häufigkeit des Zugriffs auf diesen Knoten entspricht.
Das besagt, dass zu erwarten ist, dass bei jeweils 18
Suchvorgängen (im Beispielbaum) in diesem Baum viermal
nach A gesucht wird, zweimal nach B, einmal nach C usw.
Bei jedem der vier Suchvorgänge, die A betreffen, sind zwei
Zugriffe auf Knoten erforderlich, bei jedem der zwei
Suchvorgänge, die B betreffen, drei Zugriffe auf Knoten usw.
Man kann ein Maß für die „Kosten“ des Baumes berechnen,
indem man die jedem Knoten zugeordnete Häufigkeit mit
seinem Abstand von der Wurzel multipliziert und dann die
Summe dieser Produkte bildet. Dies ist die gewichtete innere
Pfadlänge des Baumes.
G.Heyer
30
Algorithmen und Datenstrukturen 2
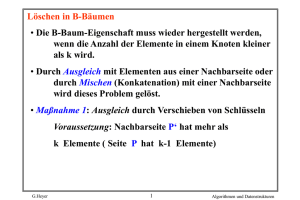
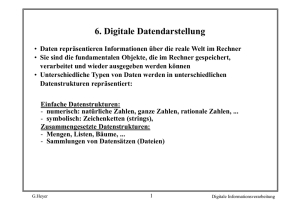
Ein binärer Suchbaum mit Häufigkeiten
C
1
F
A
2
4
D
B
3
2
E
5
G
1
Für diesen Baum beträgt die gewichtete innere Pfadlänge
4 * 2 + 2 * 3 + 1 * 1 + 3 * 3 + 5 * 4 + 2 * 2 + 1 * 3 = 51 .
Ziel: Für die gegebenen Schlüssel mit den gegebenen
Häufigkeiten den binären Suchbaum bestimmen, der unter
allen solchen Bäumen die kleinste innere Pfadlänge besitzt.
G.Heyer
31
Algorithmen und Datenstrukturen 2
Dieses Problem weist Ähnlichkeiten zu dem Problem der
Minimierung der gewichteten äußeren Pfadlänge auf, das bei
der Betrachtung der Huffman-Codierung untersucht wurde.
Bei der Huffman-Codierung war es jedoch nicht erforderlich,
die Reihenfolge der Schlüssel beizubehalten; bei dem binären
Suchbaum muss die Eigenschaft erhalten bleiben, dass alle
links von der Wurzel befindlichen Knoten Schlüssel besitzen,
die kleiner sind usw.
Diese Forderung bewirkt, dass das Problem dem oben
betrachteten Problem der Multiplikation mehrerer Matrizen
sehr ähnlich ist; es kann praktisch das gleiche Programm
verwendet werden.
G.Heyer
32
Algorithmen und Datenstrukturen 2
Annahme: Gegeben:
Menge von Suchschlüsseln
K1 < K2 < ... < KN und
Menge von zugehörigen Häufigkeiten r0, r1, . . . ,rN
wobei ri die vermutete Häufigkeit des Zugriffs auf den
Schlüssel Ki ist.
Ziel: Bestimmung des binären Suchbaums, für den die über
alle Schlüssel gebildete Summe der Produkte dieser
Häufigkeiten mit den Abständen des Schlüssels von der
Wurzel ( den Kosten des Zugriffs auf den entsprechenden
Knoten) minimal wird.
Der Zugang zu diesem Problem mittels dynamischer
Programmierung besteht darin, der Reihe nach für jedes
1 j N - 1 die beste Möglichkeit zu berechnen, einen
Unterbaum zu erzeugen, der
Ki, Ki+1, ... , Ki + j für 1 i N - j enthält.
G.Heyer
33
Algorithmen und Datenstrukturen 2
Implementierung
for ( i = 1 ; i <= N ; i++ )
for ( j = i +1; j <= N+1 ; j++ ) cost[i] [j] = INT_MAX ;
for ( i = 1 ; i <= N ; i++ ) cost[i] [i] = f [i];
for ( i = 1 ; i <= N+1; i++ ) cost[i] [i-1] = 0 ;
for ( j = 1 ; j <= N - 1 ; j++ )
for ( i = 1 ; i <= N - j ; i++ )
{ for ( k = i ; k <= i + j ; k++ )
{
t = cost[i] [k - 1] + cost[k+1] [i + j] ;
if ( t < cost[i] [i+j] )
{ cost[i] [i + j] = t ; best[i] [i+j] = k ; }
}
for ( k = i ; k <= i + j ; cost[i] [i+j] += f[k++] ) ;
}
G.Heyer
34
Algorithmen und Datenstrukturen 2
Für jedes j wird die Berechnung ausgeführt, indem jeder
Knoten als Wurzel ausprobiert wird und im voraus berechnete
Werte verwendet werden, um die beste Möglichkeit zur
Erzeugung der Unterbäume zu ermitteln.
Für jedes i k i + j möchte man den optimalen Baum mit
Kk als Wurzel finden, der Ki , Ki+1 , . . . , Ki+j enthält.
Dieser Baum wird gebildet, indem der optimale Baum für
Ki , Ki+1 , . . . , Kk-1 als der linke Unterbaum und der optimale
Baum für Kk+1 , K k+2 , . . . , K i+j als der rechte Unterbaum
verwendet wird. Die innere Pfadlänge dieses Baumes ist
gleich der Summe der inneren Pfadlänge der beiden
Unterbäume und der Summe der Häufigkeiten für alle
Knoten (da jeder Knoten in dem neuen Baum einen Schritt
weiter von der Wurzel entfernt ist).
G.Heyer
35
Algorithmen und Datenstrukturen 2
Optimaler binärer Suchbaum
D
3
A
E
4
5
B
F
2
2
C
G
1
1
Die gewichtete innere Pfadlänge dieses Baumes beträgt 41.
Man muss beachten, dass die Summe aller Häufigkeiten
jedesmal zu den Kosten addiert wird, weshalb sie für die
Bestimmung des Minimums nicht benötigt wird. Weiterhin
muss cost[i][i - 1] = 0 gelten, um die Möglichkeit zu
berücksichtigen, dass ein Knoten nur einen Nachfolger hat
(beim Problem der Multiplikation mehrerer Matrizen gab es
keine analoge Möglichkeit).
Wie zuvor ist ein kurzes rekursives Programm erforderlich,
um anhand des mit Hilfe des Programms berechneten
Felds best den eigentlichen Baum zu rekonstruieren.
G.Heyer
36
Algorithmen und Datenstrukturen 2
Eigenschaft:
Das Verfahren der dynamischen Programmierung zur
Bestimmung eines optimalen binären Suchbaums erfordert
einen zu N3 proportionale Zeit und einen zu N2 proportionalen
Speicherplatz.
Der Algorithmus arbeitet wieder mit einer Matrix der Größe
N2 und benötigt für jedes Element eine zu N proportionale
Zeit.
In Wirklichkeit ist es in diesem Falle möglich, die
erforderliche Zeit auf N2 zu reduzieren, indem man die
Tatsache ausnutzt, dass die optimale Position der Wurzel eines
Baumes nicht zu weit von der optimalen Position für die
Wurzel eines etwas kleineren Baumes entfernt sein kann, so
dass k in dem obigen Programm nicht alle Werte von i bis i+j
durchlaufen muss.
G.Heyer
37
Algorithmen und Datenstrukturen 2