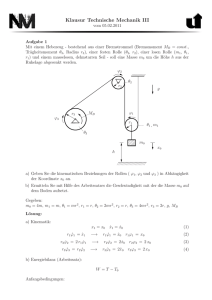
MECHANIK III
Werbung

MECHANIK III Mechanik deformierbarer Körper Mechanik III h k Flü i k i Flüssigkeiten Nahordnung frei beweglich geringe thermische Bewegung kleiner Abstand Volumenelastizität geringe Kompressibilität i K ibili ä F kö Festkörper Bestandteile geordnet, gebunden um Gleichgewichtslage geringe thermische Bewegung kleiner Abstand Gestaltelastizität Gase keine Ordnung frei beweglich füllt verfügbares Volumen aus große thermische Bewegung, großer Abstand (> x10) geringe Wechselwirkung k komprimierbar i i b Mechanik III h k • Ordnung Ordnung der Teilchen der Teilchen eines Körpers • Kräfte zwischen Teilchen Kräfte zwischen Teilchen Molekülbindungen (später) Gleichgewichtslage bei minimaler Energie Kräfte zwischen Atomen Federn Zustand abhängig von Energie der Teilchen (th (thermische i h Energie) gasförmig flüssig fest Mechanik III h k 1 6 Deformierbare Körper 1.6 Deformierbare Körper • Deformation: elastisch – Deformation: elastisch plastisch (nach Kraft urspüngliche Gestalt, bzw. Formänderung) • Zugkraft: Hookesches Gesetz Längenänderung proportional zu Kraft L F E A L E linearer linearer Zusammenhang nur bei kleinen Kräften (Proportionalitätsbereich (bis P)) nach Fließgrenze (F) verschieben der h Fli ß (F) hi b d Netzebenen, Einschnürung, Reißen E Elasitzitätsmodul A Fläche =F/A Zugspannung Dehnung D h Mechanik III h k • Volumenänderung • Querkontraktion: auch Änderung des Querschnitts auch Änderung des Querschnitts V L d 2 V L d E d 1 2 L d L (µ..Poissonzahl) Umkehrung bei Kraft von allen Seiten (Druck p=‐) Seiten (Druck p Kompression V p V K Mechanik III h k • allgemeine Deformationen: allgemeine Deformationen: Scherung: Kraft tangential an Fläche (Schub‐, Schermodul G) Drillung: Torsion Drillung: Torsion • elastische Energie Eel: (Energiedichte e) Kraft dehnt…verformt Körper Kraft dehnt verformt Körper (Längenänderung Arbeit Energie) Eel e 12 E 2 V Mechanik III h k • Biegung Balken fest eingespannt Kraft F in Entfernung L Kraft F in Entfernung L L3 smax F oben Zugspannung 3EIF unten Druckspannung dazwischen "neutrale Faser" (keine Längenänderung) Flächenträgheitsmoment I g g F berücksichtigt Abhängigkeit von Querschnitt des Balkens Kraft bewirkt Drehmoment – Zug‐ und Druckspannung bewirken Drehmoment in umgekehrter Richtung (im Gleichgewicht entgegengesetzt gleich) Mechanik III h k • Knickung: Knickung: Last auf Säule (Druckspannung) Last auf Säule (Druckspannung) Knicken, wenn Knicklast FKn überschritten ist, und wenn zusätzlich Störung auftritt (instabiles Gleichgewicht) Elastizität bewirkt Rückstellmoment neues Gleichgewicht möglich neues Gleichgewicht möglich FKn 2Ed 3b 12 L2 (aber neues Drehmoment um Mittelpunkt bewirkt meist sehr schnelles Abknicken) • Härte: Hä Stoff A ist Härter als B, wenn B von A leichter geritzt werden kann als umgekehrt ( Mohs umgekehrt ( Mohs – Härteklassen) Brinell‐Härte HB=F/A(d): Stahlkugel wird mit Kraft F auf Stoff gedrückt, d ü kt Auflage mit Radius d. L/2 Mechanik III h k 1 7 Reibung 1.7 Reibung • Ursachen: Bei Kontakt treten Kräfte zwischen Atomen unterschiedlicher Körper auf. Rauhe, unebene Oberflächen • Haftreibung • Gleitreibung FH H FN FG G FN Kraft FH, bzw. FG sind entgegengesetzt zu FZ • Rollreibung TR R FN (elastische) Verformung von Kugel/Untergrund… Drehmoment T D h TR dem Antriebsmoment d A i b entgegengesetzt Kugellager, Gleitlager Mechanik III h k • Dichte: Dichte 1 8 Druck Dichte 1.8 Druck, Dichte mV Verhältnis zwischen Masse m und Volumen V ändert sich z.B. bei Dehnung und Kompression (bei Volumenänderungen) bei Dehnung und Kompression (bei Volumenänderungen) F p • Druck: D k (Achtung gleiches Symbol wie Impuls) A Greift an einem Flächenstück A senkrecht zu ihm di l i h äßi üb di Flä h die gleichmäßig über die Fläche verteilte Kraft t ilt K ft F an, dann heißt das Verhältnis der Kraft zur Fläche Druck Kraft von allen Seiten (vor allem bei Flüssigkeiten, Gasen) Kraft von allen Seiten (vor allem bei Flüssigkeiten Gasen) oder lokal (z.B.: bei Härtetest) Einheit: 1Nm Einheit: 1Nm−2 = 1 Pa = 1 Pa (1 Pascal) = 10 (1 Pascal) = 10−5 bar bar (bei Luftdruck: auch atm=101 325 Pa, Torr=101 325/760 Pa) Mechanik III h k 1 9 Beispiele für Deformationen 1.9. Beispiele für Deformationen • Welche Form hat die Erde ? Welche Form hat die Erde ? wie kann Oberfläche definiert werden ? Üb Übergang von fester, bzw. flüssiger Phase zu gasförmiger f t b flü i Ph fö i Oberfläche senkrecht zu Lot, überall gleiche Schwerkraftsbeschleunigung mittlere Meeresoberfläche (abzüglich Gezeiten und Strömungen) Erde ist Kugel (g = const) ABER: sie rotiert, daher Zentrifugalkraft, am ABER i ti t d h Z t ifg lk ft t const stärksten am Äquator (größte Entfernung d zur Drehachse) Dichte nimmt mit Tiefe zu Erde ist Rotationssphäroid g 2d GME r 2 rÄqu/rPol=1+1/298,25 1+1/298 25 Mechanik III h k • Geoid inhomogene Massever‐ teilung Variationen in Variationen in g • Messung von g Gravitometer G it t (Referenzmassen (R f +F d + Federwaage) ) Satelliten: Bahn: Bahn: Gravitationskraft = Zentrifugalkraft Gravitationskraft Zentrifugalkraft aus Bahnanbweichungen Bestimmung des Geoids GOCE: (TU München, LS Rummel) ( , ) Satellit auf ca. 255 km Ionen‐Antrieb wegen Luftreibung notwendig Beschleunigungssensoren, GPS‐Positionierung hl Mechanik III h k Beschleunigungssensoren: Beschleunigungssensoren: Kraft auf Kraft auf (träge) Masse in beschleunigtem System Messung der Kraft: Feder, Piezo (wandelt Kraft‐Kompression in Spannung) b bzw. einer Verschiebung gegen Kraft: kapazitiv, magnetisch, optisch… i V hi b K ft k iti ti h ti h ‐ Auto, Maschinen, Harddisk, Lagekontrolle in Fotoapparaten und Handy • Bestimmung der Oberfläche: Bestimmung der Oberfläche: Landvermessung Satelliten TerraSAR + TanDEM + TanDEM Satelliten TerraSAR polare Umlaufbahn, ca. 514 km Höhenbestimmung mittels Radar (9,65 GHz) Höhenmodell mit 12x12 m Auflösung genaue Beobachtung von Veränderungen (Plattentektonik) Mechanik III h k • Schüttwinkel körniges Material bildet Schüttkegel FH> F > FP sin Masse bleibt in Ruhe, so lange Haftreibung > vorwärtstreibender Kraft zusätzlich abhängig von: Korngröße und ‐form, Schüttdichte, Feuchtigkeit eckiger, scharfkantiger Sand scharfkantiges Geröll g Steinkohle, Koks Kaffeebohnen, Weizen Zucker S l Salz Mehl 32°–35° 40° 45° 33° 35° 40° 45° Mechanik III h k Biomechanik • Anpassung Anpassung auf unterschiedlichste auf unterschiedlichste Anforderungen • Optimierung: Gestaltsanpassung minimale Materialmengen Umweltbedingungen Zweck Extremitäten säulenartig Druckbeanspruchung Extremitätenknochen bilden Winkel (beweglich!) Biegebeanspruchung Mechanik III h k • Gelenke Beweglichkeit Kraftübertragung (Zug Kraftübertragung (Zug‐,, und Druckkraft) und Druckkraft) große Kräfte wegen kurzer Hebelarme (mehrfaches des Körpergewichts) Bewegungsfreiheit abhängig von Bauform B f ih it bhä i B f eingeschränkt Achsen nicht fix, oft verschiebbar Sehnen übernehmen Kräfte Bänder wenn Belastung nicht der Bewegungsrichtung entspricht der Bewegungsrichtung entspricht Sehnen, Bänder sehr elastisch über kurzen Bereich, danach reißen, Knorpeleinlagerungen erhöhen Elastizität, verringert Querkontraktion l iiä i Q k ki extrem hohe Zugbelastbarkeit 60 – 100 N/mm2 (zB. menschl. Achillessehne bis 10.000 N) Mechanik III h k • Skelettanpassung optimierte Belastbarkeit bei min. Material: Röhren, Lamellen und Trabelkel zur Verstärkung (adaptiv) gebogene Knochen wenn Biegebeanspruchung R1 K R1 M1 M1 M2 M2 R2 R2 K Mechanik III h k Stabilisierung durch Gegenlast und antagonistische Muskel Stabilisierung durch Gegenlast und antagonistische Muskel Ausgleich von Scherbelastung bei Fehlhaltung Mechanik III h k • Kombination von Materialien: Kombination von Materialien: anorganischen (Hydroxyapatit (Calciumphosphat), Wasser, Ca organischen Substanzen (Kollagen !) • Knochen: E 2104 N/mm2 = 20 GPa Hartholz