Formeln zur Technischen Mechanik
Werbung

Formeln zur Technischen Mechanik
von Gerald Meier
1 Kinematik von Punkten und starren Körpern
1.1 Kinematik des Punktes
1.1.1 Orts-, Geschwindigkeits- und Beschleunigungsvektor
r r
r = r(t )
r r
v = &r
r r r
a = v& = &&r
1.1.2 Geschwindigkeits und Beschleunigungsvektor in kartesischen
Koordinaten
r
r
r
r
r ( t ) = x( t ) ⋅ e x + y( t ) ⋅ e y + z( t ) ⋅ e z
r
r
r
r
& (t ) ⋅ ez
v( t ) = {
x& ( t ) ⋅ e x + {
y& ( t ) ⋅ e y + z{
vx
vz
vy
r
r
r
r
( t ) ⋅ e x + &&{
(t ) ⋅ ez
a( t ) = &&x{
y( t ) ⋅ e y + &&z{
ax
az
ay
1.1.3 Sonderfall: Geradlinige Bewegung
r = x( t )
r
v = x& ( t )
v = v = v x2 + v y2 + v z2
r
a = &&x( t )
a = a = ax2 + a y2 + az2
Gegebene
Funktion
x( t )
v( t )
a( t )
v( x )
a( x )
Gesuchte Funktion
v=
dx
dt
d2x
a= 2
dt
dv
a=
dt
t
x = x 0 + ∫ vdt
t0
t
x = x0 + v 0 (t − t 0 ) + ∫
∫ adt
t
2
v = v 0 + ∫ adt
t0
a=v
t0
x
dv
dx
t = t0 + ∫
dx
x0 v
x
t = t0 + ∫
x
v = 2 ∫ adx + v 0
2
x0
x0
t( x )
x( v )
dx
x
2 ∫ adx + v 0 2
x0
v=
1
dt dx
a=
v
dx dv
a=
1
d 1
⋅
dt dx dx dt dx
v
t = t0 + ∫
1 dx
⋅ dv
v 0 v dv
- Seite 1 -
- Gerald Meier: Technische Mechanik Formeln -
a( v )
t( v )
v
v
x = x0 + ∫
t = t0 + ∫
vdv
v0 a
v
x = x0 + ∫ v ⋅
v0
dv
v0 a
dt
dv
dv
a=
1
dt dv
1.1.4 Ebene Bewegung in Polarkoodrinaten
r
de r dϕ r
r
r
r&
r
r
r
=
de r = dϕeϕ ⇒ e r =
eϕ = ϕ& eϕ
r = r ⋅ er
dt r dt
deϕ
dϕ r
r
r
r
r
deϕ = −dϕe r ⇒ e& ϕ =
=−
e r = −ϕ& e r
dt
dt
r
r
r
r
r
v = v r e r + v ϕ eϕ = &re r + rϕ& eϕ
r
r
r
r
r
&& + 2&rϕ& )eϕ
a = a r e r + a ϕ eϕ = (&&r − rϕ& 2 )e r + ( rϕ
ϕ& = ω
&& = ω
&
ϕ
1.1.4.1 Kreisbewegung (r=const.)
r
r
r
r
v = rωeϕ
r = r ⋅ er
r
r
r
& eϕ
a = − rω 2 e r + rω
1.1.4.2 Zentralbewegung um Ursprung (aj=0, r²ω=const. )
r
r
r
r = r ⋅ er + zez
r
r
r
r
r
r
r
& z
v = v r er + v ϕ eϕ + v z ez = &rer + rϕ& eϕ + ze
r
r
r
r
r
r
r
&& + 2&rϕ& )eϕ + &&zez
a = a r er + aϕ eϕ + a z ez = (&&r − rϕ& 2 )er + ( rϕ
1.1.5 Räumliche Bewegung in natürlichen Koordinaten
r r
r = r[s( t )]
r
r
r
r r& dr dr ds
v= r=
=
= vet
dt ds dt
r r&
r
r
& t + ve& t
a = v = ve
1.2 Realtivkinematik des Punktes
1.2.1 Translation des Bezugssystems
r r r
r
r
r
r
r = r0′ + r0′ P = r0′ + xe x + ye y + ze z
r &r
r r r r
& r y + ze
& rz
v = &r = &r0′ + &r0′ P Bez = &r0′ + xe
+ ye
x
r{ 123
vF vr
Re l .
r
r &&r &&r &&r
r
r
r
a = r = r0′ + r0′ P Bez = &&r0′ + &&xe x + &&ye y + &&ze z
r{ 1r23
aF
aRe l
- Seite 2 -
- Gerald Meier: Technische Mechanik Formeln -
1.2.2 Translation und Rotation des Bezugssystems
r r r
r
r
r
r
r = r0′ + r0′ P = r0′ + xe x + ye y + ze z
(
) (
)
r r r r
r
& r y + ze
& r z + xer& x + yer& y + zer& z
& r x + ye
v = &r = &r0′ + &r0′ P = &r0′ + xe
144
r 2r443
r2443 144
ω
dr0’P
F × r0 ’P
dt
Bez.
r r r
v = v F + v Re l
mit
r
r r r
v F = v 0 + ωF × r0’P
r
dr0’P
r
v Re l =
dt Bez.
r
r&
r dr0’P
r r&
r
a = v 0 + ωF × r0’P + ωF ×
dt
r r r
r
a = a F + a Re l + a C
mit
r
r r dv Re l
+ ωF × r0’P +
dt
Bez.
r
r
+ ωF × v Re l
Bez.
r r
r
r r
r r
a F = a 0’ + ωF × r0’P + ωF × (ωF × r0’P )
r
r
dv Re l
d 2 r0’P
r
=
a Re l =
dt Bez.
dt 2 Bez.
r
r
r
a C = 2ωF × v Re l
r
a C : Coriolisbeschleunigung
Ebene Bewegung
→ bewegtes Polarkoordinatensystem
r
r
r
v F = v 0’ + rωF eϕ
r r
r
r
& Feϕ − rωF 2 er
a F = a 0’ + rω
1.3 Kinematik des starren Körpers
1.3.1 Translation des starren Körpers
r
r
r
r
rP = x( t ) ⋅ e x + y( t ) ⋅ e y + z( t ) ⋅ e z
r
r
r
r
r
v P = &rP ( t ) = x& ( t ) ⋅ e x + y& ( t ) ⋅ e y + z& ( t ) ⋅ e z
r
r
r
r
r
r
a P = v& P ( t ) = &&rP ( t ) = &&x( t ) ⋅ e x + &&y( t ) ⋅ e y + &&z( t ) ⋅ e z
1.3.2 Rotation des starren Körpers
1.3.2.1 Rotation um eine raumfeste Drehachse
r
r
r
v P = v ϕ eϕ = rωeϕ
r
r
r
r
r
& eϕ
a P = a r ⋅ e r + a ϕ ⋅ eϕ = −rω2 e r + rω
1.3.2.2 Rotation um einen Punkt
r
drP
r
r r dϕ r r
= ( eω × r0’P )
= ω × r0’P
vP =
dt
dt
r& r
r r r
r
aP = ω
× r0’P + ω × (ω × r0’P )
- Seite 3 -
- Gerald Meier: Technische Mechanik Formeln -
1.3.3 Allgemeine Bewegung des starren Körpers
r r
r
r
v P = v 0’ + ω × r0’P
r& r
r r r
r
r
× r0’P + ω × (ω × r0’P )
a P = a 0’ + ω
r r r
rP = rA + rAPr
r
r
r
v P = v A + ω × rAP
r& r
r r r
r
r
× rAP + ω × (ω × rAP )
aP = aA + ω
1.3.4 Ebene Bewegung des starren Körpers
r r r
r
r
y
rP = rA + rAP = rA + re r
r
r
r
r
r
v P = v A + v AP = v A + rωeϕ
r
r
r
r
r
r
r
& eϕ
a P = a A + a r AP + a ϕ AP = a A − rω2 e r + rω
P
r
rAP
r
eϕ
r
rP
r
er
.
A
r
rA
ϕ
0
x
Bei einer ebenen Bewegung des starren Körpers setzt sich die Geschwindigkeit bzw.
Beschleunigung des beliebigen körperfesten Punktes P zusammen aus der Geschwindigkeit bzw.
Beschleunigung des körperfesten Bezugspunktes A sowie der Geschwindigkeit bzw.
Beschleunigung des Punktes P infolge der Drehung um A.
r
ist A Momentanpol → v A = 0
(
v r r
r
r
rAP = rAP e r = − P e z × eϕ
ω
)
1.3.4.1 Rastpolbahn
Momentanpollagen im raumfesten Bezugssystem in Abhängigkeit von der Zeit
xM = xA −
v Ay
ω
v Ax
yM = yA −
ω
1.3.4.2 Gangpolbahn
Gesamtheit aller Momentanpollagen in einem körperfesten System
(
(
1
−v Ay cos ϕ + v Ax sin ϕ
ω
1
yM =
v sin ϕ + v Ax cos ϕ
ω Ay
xM =
)
)
Beispiel: abrollendes Rad
- Seite 4 -
- Gerald Meier: Technische Mechanik Formeln -
1.4 Relativkinematik des starren Körpers
Einführung von drei Koordinatensystemen:
1) raumfestes x, y, z -Koordinatensystem mit Bezugspunkt 0
r
r r
2) bewegtes x′, y′, z′ -Koordinatensysten mit Bezugspunkt 0’ mit v 0’, a 0’ und ωF gegenüber
raumfesten System.
r
r r
3) körperfestes x, y, z -Koordinatensystem mit Bezugspunkt A mit v A , a A und ω gegenüber
r
r r
raumfesten System und ωRel = ω − ωF gegenüber bewegten System.
r
r
r
v P = v PF + v P Re l
mit
r r
r
r
a P = a PF + a P Re l + a PC
r
r
r
r
v PF = v 0’ + ωF × ( r0’A + rAP )
r
r
r
r
v P Re l = v A Re l + ωRe l × rAP
r&
r
r
r
r
r
r
r
r
a PF = a 0’ + ω
F × ( r0’A + rAP ) + ωF × ωF × ( r0’A + rAP )
r&
r
r
r
r
r
r
a P Re l = a A Re l + ω
Re l × rAP + ωRe l × (ωRe l × rAP )
r
r
r
r
r
r
a PC = 2ωF × v A Re l + 2ωF × (ωRe l × rAP )
[
mit
]
2 Kinetik des Massenpunktes
2.1 Die NEWTONschen Axiome der Mechanik
r
r
p = mv
r r
r
r
F = p& = ma
[F] = N = kg ⋅ m s2
2.2 Dynamische Grundgleichung
2.2.1 Freie Bewegung
Beispiel Wurfparabel
2.2.2 Geführte Bewegung
Zwangskräfte
r r sind Reaktionskräfte und stehen snkrecht zur Bahn.
r
ma = F + Z
Beispiel: Fadenpendel
2.2.3 Bewegung mit Widerstandskräften
Widerstandskräfte wirken tangential zur Bahn und sind der Bewegung entgegengerichtet.
R = µ⋅ N
(COULOMBsches Reibungsgesetz)
(Strömungswiderstand bei laminarer Strömung)
FW = kv
FW = kv 2
FW = c W
ρ 2
Av
2
(Strömungswiderstand bei turbulenter Strömung)
(Widerstandsgesetz) A: Fläche in Strömungsrichtung
v: Anströmungsgeschwindigkeit
ρ: spezifische Masse des Fluides
cW: sonstige Einflüsse
- Seite 5 -
- Gerald Meier: Technische Mechanik Formeln -
2.3 Arbeitssatz und Energiesatz
2.3.1 Arbeitssatz
→ zeitfreie Lösungen, Anfangs- und Endzustand als Funktion des Weges
r r
W = ∫ Fdr
Arbeitssatz: Ek1 − E k 0 = W0−1
Arbeit:
Die Arbeit, die von der an der Punktmasse eingeprägten Kraft zwischen zwei Bahnpunkten verrichtet
wird, ist gleich der Änderung der kinetischen Energie dieser Punktmasse.
r
dW r dr r r
P=
= F = Fv
Leistung:
dt
dt
genutzte Leistung
Wirkungsgrad: η =
zugeführte Leistung
r r r
ma = F + Z ⇒
E kin = m
m
[P] = W =
Nm
s
r r
v2
= ∫ Fdr
2
v2
2
Beispiel: Abrutschen eines Klotzes
2.3.2 Energiesatz
r
∫ Fdrr = 0 ⇒ konservatives Kraftfeld
r
r r
F = −grad Ep ( r )
r
rot( F) = 0 ⇒ das konservative Kraftfeld ist wirbelfrei
(
)
r
r2
r r r
r r r
r
(Kraft)Potential E pot ( r ) = −∫ F( r )dr + C = −∫ F( r )dr
r
r1
E kin1 + E pot1 = E kin 2 + E pot 2 = E = konst.
Die aus kinetischer und potentieller Energie gebildete Gesamtenergie E des Massenpunktes bleibt
während einer Bewegung konstant, wenn alle eingeprägten Kräfte konservativ sind.
2.3.2.1 Schwerkraftpotential
F = mg
Epot = mgz
2.3.2.2 Gravitationspotential
Mm
F= k 2
r
Mm
Epot = −k
r
- Seite 6 -
- Gerald Meier: Technische Mechanik Formeln -
2.3.2.3 Beispiel: Potential einer elastischen Feder (elastisches Potential)
F = cx
x2
Epot = c
2
Beispiele: 1) Freier Fall ohne Luftwiderstand
2) Bewegung eines reibungsfreien mathematischen Pendels
2.4 Impuls und Stoßvorgänge
2.4.1 Impulssatz
t
r
r
r
r
mv ( t ) − mv( t 0 ) = ∫ Fdt = J
t0
Die Änderung der Bewegungsgrößen ist gleich dem Impuls (Zeitintegral über die eingeprägte Kraft) .
2.4.2 Der zentrale Stoß zweier Punktmassen
Impulserhaltung → m1V1 + m 2V2 = m1v1 + m 2 v 2
v1, v2 Geschwindikeiten vor Stoß
V1, V2 Geschwindigkeiten nach Stoß
2.4.2.1 Vollplastischer Stoß
m v + m2v2
V1 = V2 = V = 1 1
m1 + m 2
2.4.2.2 Vollkommen elastischer Stoß
Ekinges vorher = Ekinges nachher
2m 2
V1 = v1 −
(v − v )
m1 + m 2 1 2
2 m1
V2 = v 2 +
(v − v )
m1 + m 2 1 2
2.4.2.3 Wirkliche teilelastische Stöße
V2 − V1
Stoßzahl: ε =
v1 − v 2
m 2 m1
V1 =
− ε v1 + (1 + ε )v 2
m1 + m 2 m 2
m2
m1
V2 =
− ε v 2
(1 + ε )v1 +
m1 + m 2
m1
m1m 2
2
∆Ekin = 12
v1 − v 2 ) (1 − ε 2 )
(
m1 + m 2
ε = 0: vollplastischer Stoß
ε = 1: vollkommen elastischer Stoß
Beispiele: 1) Rücksprunghärte
2) Rückstoß beim Trennen von Massen
- Seite 7 -
- Gerald Meier: Technische Mechanik Formeln -
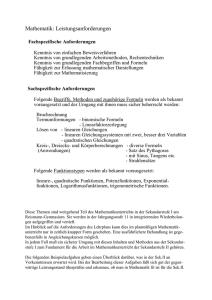
2.5 Momentensatz (Drehimpulssatz)
r
r r
Moment: M ( 0 ) = r × F
r
M ( 0 ) = Fr sin ϕ = Fa
Drall:
r
r
r r r
L( 0 ) = r × p = r × mv
r
L( 0 ) = amv
Drallsatz:
r
dL( 0 )
dt
v
F
ϕ
m
L
M
r
r
0
r
= M (0)
ϕ
0
a
a
Moment
Drall
Die zeitliche Ableitung des Drehimpulsvektors
in Bezug auf einen beliebigen raumfesten Punkt 0 ist gleich dem Moment der am Massenpunkt
angreifenden eingeprägten Kraft bezüglich desselben Punktes .
t2
r
r
r
Drehimpulssatz: L( 0 ) ( t 2 ) − L( 0 ) ( t 1 ) = ∫ M ( 0 ) ( t )dt
t1
Sonderfall: Ebene Kreisbewegung
L( 0 ) = mrv = mr 2ω = J ( 0 )ω
&&
M ( 0 ) = J ( 0 )ϕ
Beispiel: mathematisches Pendel
2.6 Trägtheitskraft und D’ALEMBERTsches Prinzip
2.6.1 Formale Rückführung der Kinetik auf die Statik
r
r
D’Alembertsche Trägheitskraft: FT = − ma
r r r
→ dynamische Grundgleichung: F + Z + FT = 0
Die Summe aller auf einen Massenpunkt einwirkenden Kräfte einschließlich der Trägheitskraft ist zu
jedem Zeitpunkt im Gleichgewicht .
Beispiele: 1) Freier Fall ohne Luftwiderstand
2) System von Feder und geschwindigkeitsproportionalem Dämpfer
2.6.2 D’ALEMBERTsches Prinzip (Fassung von LAGRANGE)
r r
r r
virtuelle Verrückung δ r ⊥ Z → Zδ r = 0
Die Bewegung des Massenpunktes erfolgt so, daß die virtuelle Arbeit der Zwangskräfte zu jedem
Zeitpunkt verschwindet .
⇒
r
r
( F + F )δrr = 0
T
δW + δWT = 0
Die Bewegung des Massenpunktes erfolgt so, daß bei einer virtuellen Verrückung die Summe der
virtuellen Arbeiten der eingeprägten Kräfte und der D’ALEMBERTschen Trägheitskraft zu jedem
Zeitpunkt verschwindet.
Beispiele: 1) Bewegung von Masse entlang Kurve
2) Ebene Bewegung eines Massepunkts bei trockener Reibung
- Seite 8 -
- Gerald Meier: Technische Mechanik Formeln -
2.7 Planeten- und Satellitenbewegung (KEPLERsche Gesetze)
T=
Umlaufzeit:
Energiesatz:
Drallsatz:
A πab
=
C
C
m
E kin + E pot = 12 mv 2 − k
r
dL( 0 )
dt
a
Mm
=E
r
r (ϕ ) =
b
r
r
r r
= M ( 0 ) = 0 ⇒ L( 0 ) = mr × v = konst.
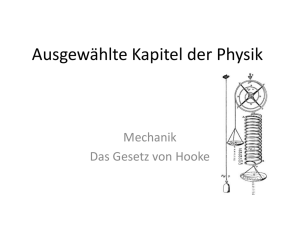
erstes KEPLERsches Gesetz
p
1 + ε cos ϕ
e=0
e<1
e=1
e>1
c
M
a
p
A
⇒
⇒
⇒
⇒
Kreis
Ellipse
Parabel
Hyperbel
Planeten bewegen sich auf Ellipsenbahnen, in deren einem Brennpunkt die Sonne steht.
zweites KEPLERsches Gesetz
r 2ϕ& = 2C
Planeten bewegen sich mit konstanter Flächengeschwindigkeit um die Sonne, d.h. der Fahrstrahl
von der Sonne zum Planeten überstreicht in gleichen Zeiten gleiche Flächen.
drittes KEPLERsches Gesetz
T =
2
(2π)2 a 3
kM
Die Quadrate der Umlaufzeiten von Planeten verhalten sich wie die dritten Potenzen der großen
Halbachsen ihrer Umlaufbahnen.
3 Kinetik des Massenpunktsystems
actio = reactio
r
r
Fik = −Fki
Beispiel: ATWOODsche Fallmaschine
3.1 Schwerpunktsatz
r
n
r ∑ m i ri
r
r
Schwerpunkt S rS =
⇒ mrS = ∑ m i ri
∑ mi
i=1
r
r
r&&
Schwerpunktsatz mrS = ma S = F
Der Schwerpunkt S des Massenpunktsystems bewegt sich so, als wenn die Gesamtmasse in ihm
vereinigt wäre und alle äußeren
Kräfte an ihm angreifen würden .
r
r
p& S = F
Die zeitliche Änderung des Gesamtimpulses des Massenpunktsystems ist gleich der Resultierenden
aller äußeren Kräfte .
Impulssatz
t
r
r
r
pS ( t ) − pS ( t 0 ) = ∫ Fdt
t0
- Seite 9 -
- Gerald Meier: Technische Mechanik Formeln -
3.2 Momentensatz (Drallsatz)
3.2.1 Raumfester Bezugspunkt
r
r
Gesamtdrehimpuls L( 0 ) = ∑ L i ( 0 )
i
resultierendes Moment der äußeren Kräfte
Momentensatz (Drallsatz)
r
r&
L( 0 ) = M ( 0 )
r
r
r r
M ( 0 ) = ∑ M i ( 0 ) = ∑ ri × Fi
i
i
(
)
Die zeitliche Änderung des Gesamtdrehimpulses eines Massenpuktsystems bezüglich des
raumfesten Punktes 0 ist gleich dem resultierenden Moment der äußeren Kräfte bezüglich desselben
Punktes
Drehimpulssatz
t
r
r
r
L( 0 ) ( t ) − L( 0 ) ( t 0 ) = ∫ M ( 0 ) ( t )dt
t0
3.2.2 Bewegter Bezugspunkt 0’
r&
r
r
r
Momentensatz (Drallsatz) L( 0’) = M ( 0’) + m a ( 0’) × r0’S
r
Sonderfälle: 1) r0’S = 0
⇒ Bezugspunkt 0’ ≡ S
r
⇒ Bezugspunkt 0’ nicht beschleunigt
2) a 0’ = 0
r
r
r
3) r0’S = 0 a 0 ⇒ Beschleunigungsvektor a 0’ liegt auf der Verbindungslinie 0’S
(
⇒
r&
r
L( 0 ) = M ( 0 )
r&
L( 0’) r
a( 0 ’) = 0
r
= M ( 0’)
)
r&
r
L( S ) = M ( S )
Der für den festen Bezugspunkt 0 abgeleitete Drallsatz gilt in dieser Form auch für den
nichtbeschleunigten bewegten Bezugspunkt 0’ und gilt stets für den Schwerpunkt als Bezugspunkt,
selbst wenn dieser beschleunigt ist.
3.3 Arbeits- und Energiesatz
(a)
(i)
Arbeitssatz Massenpunktsysteme E k1 − E k 2 = W0−1 + W0−1 = W0−1
Die Änderung der gesamten kinetischen Energie des Massenpunktsystems ist gleich der Summe der
von allen äußeren und inneren Kräften geleisteten Arbeit.
(a )
Arbeitssatz starrer Massenpunktsysteme E k1 − E k 2 = W0−1
(a )
(i)
(a )
(i)
Energiesatz konservativer Massenpunktsysteme Ek1 + Ep1 + Ep1 = Ek 0 + Ep 0 + Ep 0 = const
Die Summe aus kinetischer Energie und potentieller innerer und äußerer Energie eines
konservativen Massenpunktsystems bleibt bei Bewegung des Systems konstant.
(a )
(a )
Energiesatz starrer konservativer Massenpunktsysteme Ek1 + Ep1 = Ek 0 + Ep 0 = const
Beispiel: ATWOODsche Fallmaschine
- Seite 10 -
- Gerald Meier: Technische Mechanik Formeln -
4 Kinetik des starren Körpers
4.1 Rotation um eine raumfeste Achse
4.1.1 Der Momentensatz
axiales Massenträgheitsmoment
J ( ω) =
∫ r dm
2
(m)
& = J ⋅ω
& = M (( ωa ))
→ Momentensatz (Drallsatz) L
( ω)
( ω)
t
→ Drehimpulssatz
J ( ω) ⋅ ω( t ) − J ( ω) ⋅ ω( t 0 ) = ∫ M (( ωa )) ( t * )dt *
t0
Die Änderung des Drehimpulses ist gleich dem Zeitintegral über das von äußeren Kräften
herrührende Moment.
Beispiel: Pirouette
4.1.2 Axiales Massenträgheitsmoment
homogene Massenverteilung dm = ρdV
Massenträgheitsmoment
J ω = ρ ∫ r 2 dV
(V )
Trägheitsradius iω:
J ( ω) = mi ω
2
J A = J S + rS 2 m
Satz von STEINER
Das axiale Massenträgheitsmoment um eine zu der durch den Schwerpunkt gehenden Achse
parallelen Drehachse setzt sich zusammen aus dem Massenträgheitsmoment um die durch den
Schwerpunkt gehende Achse und dem Produkt Masse mal senkrechtem Abstand der beiden Achsen
im Quadrat (sog. STEINERanteil).
J S = miS 2 → i A 2 = iS 2 + rS 2
Beispiele:
Zylinder
dickwandiges Rohr
J S = 12 m( R a 2 + R i 2 )
J S = 12 mR 2
S
R
S
dünnwandiges Rohr
J S = mR 2
S
S
R
Ra
l
S
Ri
S
l
- Seite 11 -
l
- Gerald Meier: Technische Mechanik Formeln -
Zylinder
Stab (um Endpunkt)
J S = 14 m[R 2 + 13 l 2 ]
Stab (um Mittelpunkt)
J I = 13 ml 2
J S = 121 ml 2
I
S
I
I
R
l
I
l
S
l
dünne Scheibe (um x)
dünne Scheibe (um z)
J x = 14 mR 2 = 12 J z
Kugel
J z = 12 mR 2
R
R
J S = 25 mR 2
S
z
R
x
S
4.1.3 Arbeit, Energie, Leistung
W=
ϕ1
∫ Mdϕ
*
ϕ0
Die Arbeit eines Drehmomentes M ist gleich dem Integral über Moment mal Winkelelement dϕ.
P=
dW
dϕ
=M
= Mϕ& = Mω
dt
dt
Die Leistung eines Drehmomentes ist gleich dem Moment M mal der Geschwindigkeit ω.
kinetische Energie:
E k = 12 J ωω2
Arbeitssatz: E k1 − E k 0 = W0−1
Die Arbeit des Momentes M des Winkelweges von ϕ0 nach ϕ1 ist gleich der Differenz der kinetischen
Energie des Körpers.
Energiesatz bei konservativem Moment
E k1 + E p1 = E k 0 + E p 0 = const
Zuordnung von Translation und Rotation
Geradlinige Translation des
Massenpunktes
Weg
Geschwindigkeit
Beschleunigung
Masse
Kraft
Impuls
s
v = s&
a = v& = &&s
m
F
p = mv
Rotation des starren Körpers um
feste Achse
⇔
⇔
⇔
⇔
⇔
⇔
Winkel
Winkelgeschwindigkeit
Winkelbeschleunigung
Massenträgheitsmoment
Moment
Drehimpuls
- Seite 12 -
ϕ
ω = ϕ&
& =ϕ
&&
ε=ω
Jω
Mω
Lω = J ωω
- Gerald Meier: Technische Mechanik Formeln -
4.1.4 Der zentrale Drehstoß
Drehimpuls-Erhaltungssatz J 1ω1 + J 2 ω2 = J 1Ω1 + J 2 Ω2
4.1.4.1 vollplastischer Drehstoß
⇒ Ω1 = Ω2 = Ω
4.1.4.2 vollkommen elastischer Drehstoß
⇒
(E
k1
+ E k 2 )vorher = ( E k1 + E k 2 )nachher
4.1.4.3 teilelastischer Drehstoß
⇒ Stoßzahl
ε=
(Ω
(ω
2
1
− Ω1 )
− ω2 )
4.2 Ebene Bewegung
4.2.1 Schwerpunktsatz und Momentensatz
r
r
&&r
Schwerpunktsatz F = ma S = mr
S
&& S
Fx = mx
in Komponentenform
&& S
Fy = my
bewegter Bezugspunkt 0’
r&
r
r
r
L( 0’) = M ( 0’) + m(a 0’ × r0’S )
r
r
r
relativer Drehimpuls L( 0’) = ∫ r × dmv Re l
„Zwitter-Drallsatz“
(Momentensatz bez. bewegtem Punkt 0’)
(m)
r&
L( 0’) = J ( 0’)ω
Sonderfälle: 1) 0’ fällt mit dem Schwerpunkt zusammen:
& =J ω
&
L
S = MS
(S )
r
0’≡ S ⇒ r0’S = 0
r
2) Bezugspunkt 0’ ist nicht beschleunigt: ⇒ a 0’ = 0
& =J ω
L
( 0’)
( 0’) & = M ( 0’)
r
3) Beschleunigungsvektor a 0’ liegt auf der Verbindungslinie 0’S
& =J ω
L
( 0’)
( 0’) & = M ( 0’)
Beispiele: 1) Abrollen einer Walze
2) physikalisches Pendel
4.2.2 Impulssatz und Drehimpulssatz
t
Impulssatz
mx& S1 − mx& S2 = ∫ Fxdt *
t0
t
my& S1 − my& S2 = ∫ Fydt *
t0
t
Drehimpulssatz bez. Schwerpunkt
J Sϕ& 1 − J Sϕ& 2 = ∫ M Sdt *
t0
- Seite 13 -
- Gerald Meier: Technische Mechanik Formeln -
Bezugspunkt 0’ raumfest bzw. geradlinig gleichförmig bewegt
t
J ( 0’)ϕ& 1 − J ( 0’)ϕ& 0 = ∫ M ( 0’)dt *
t0
4.2.3 Kinetische Energie, Arbeitssatz und Energiesatz
r r r
2
2
kinetische Energie E k = 12 mv 0’ + 12 J 0’ω + mv 0’(ω × r0’P ) 0’ körperfester bewegter Bezugspunkt
S Schwerpunkt
E k = 12 mv S 2 + 12 J Sω2
2
1
A körper- und raumfester Bezugspunkt
Ek = 2 J Aω
Arbeitssatz: E k1 − E k 0 = W0−1
Energiesatz bei konservativem Moment
E k1 + E p1 = E k 0 + E p 0 = const
Beispiel: Abrollen einer homogenen Walze
4.2.4 Exzentrischer Stoß
r
r
Impulssatz
m 1VS1 − m 1 v S1 =
r
( tS )
r
r
m 2 VS2 − m 2 v S2 =
Drehimpulssatz
J S1Ω1 − J S1ωS1 =
r
∫ F( t )dt = J
r
r
∫ −F( t )dt = −J
( tS )
r
∫ [rr × F( t )]dt = a J
( tS )
J S2Ω2 − J S2ωS2 =
1
1
∫ [rr
( tS )
2
r
× F( t )]dt = a 2 J
V2 n − V1n
Stoßzahl ε =
v 1n − v 2 n
Beispiel: Punktmasse trifft auf Stab
4.3 Räumliche Bewegung
4.3.1 Schwerpunktsatz und Momentensatz
Zusammenfassung
der äußeren Kräfte und Momente im Schwerpunkt
r
r
r
r
F = ex Fx + e y Fy + ez Fz
r
r
r
r
M S = ex M Sx + e y M Sy + ez M Sz
Schwerpunktsatz
r r
mr&&S = F
Momentensatz in Bezug auf körperfesten bewegten Punkt 0’
in Bezug auf raum- und körperfesten Punkt A
in Bezug auf Körperschwerpunkt S
- Seite 14 -
- Gerald Meier: Technische Mechanik Formeln -
4.3.2 Drehimpulsvektor und Trägheitstensor
r r
r
r
r
r
r
r
ω = exωx + e yωy + ezωz
r0’P = ex x + e y y + ez z
axiale Massenträgheitsmomente
J xx = J x =
∫ (y
2
(m)
+ z2 )dm
J yy = J y =
Massendeviationsmomente
J xy = J yx = − ∫ xydm
∫ [r δ
2
(m)
ij
]
i, j = x, y, z
Massenträgheitsmatrix
⇒
(m)
+ z2 )dm
J xy
J yy
J zy
J zz = J z =
Lx
L( 0’) = Ly
Lz ( 0’)
( 0’)
(m)
2
+ y2 )dm
(m)
r r 1 für i = j
δ ij = ei e j =
0 für i ≠ j
Drehimpulsmatrix
J xz
J yz
J zz
∫ (x
J zx = J xz = − ∫ xzdm
(m)
− ij dm
J
xx
J ( 0’) = [J ]( 0’) = J yx
J zx
2
J yz = J zy = − ∫ yzdm
(m)
J ij =
∫ (x
r0’P 2 = x 2 + y2 + z2
Winkelgeschwindigkeitsmatrix
ωx
ω = ωy
ωz
L( 0’) = J ( 0’) ω
Parallelverschiebung des Bezugssystems (Satz von STEINER-HUYGENS)
x = xS + x
J xx = J x x + m( yS2 + zS2 )
J xy = J x y − mxS yS
J zz = J zz + m( xS2 + yS2 )
J zx = J zx − mzS xS
J yy = J y y + m( xS2 + zS2 )
y = yS + y
z = zS + z
Dehnung des Koordinatensystems
J = r 2δ − ij dm ⇒ J =
ij
∫[
(m)
]
ij
λµ
i, j = x, y, z
∫ [r δ
(m)
2
λµ
]
− λµ dm
λ, µ = x, y, z
Hauptträgheitsmomente
J I = J xx + J yy + J zz
J xx J xy J yy
J II =
+
J yx J yy J zy
J xx
J III = J yx
J xy
J yy
J xz
J yz
J zx
J zy
J zz
J xy
J yy
J zy
J xz
J yz
J zz
J
xx
J yx
J zx
( 0’)
J yz J xx
+
J zz J zx
J I
⇒0
0
0
J II
0
J xz
J zz
0
0
J III ( 0’)
Beispiele: Hauptachsen bei Quader
Hauptachsen bei Zylinder
Hauptachsen bei dünner Scheibe
- Seite 15 -
J yz = J yz − myS zS
J λµ = ∑ ∑ J ij cos(λ, i ) cos(µ, j)
i
j
- Gerald Meier: Technische Mechanik Formeln -
4.3.3 Kinetische Energie, Arbeitssatz und Energiesatz
r r
r r
r
2
kinetische Energie E k = 12 mv 0’ + 12 L( 0’)ω + mω( r0’S × v 0’ )
r r
E k = 12 mv S 2 + 12 L(S )ω
Bezugspunkt S Schwerpunkt
r
r
E k = 12 L( A )ω
Bezugspunkt A raum- und körperfest
Arbeitssatz:
E k1 − E k 0 = W0(−a1)
W0(−a1) : Arbeit durch äußere Kräfte
Energiesatz bei konservativem Momenten und Kräften
E k1 + E(pa1) = E k 0 + E (pa0) = const
4.3.4 Impuls- und Drehimpulssatz
t
r
r
r
Impulssatz
mv( t1 ) − mv( t 0 ) = ∫ F( t )dt
t0
t1
r
r
r
Drehimpulssatz L(S ) ( t 1 ) − L(S ) ( t 0 ) = ∫ M (S ) dt
t0
t1
r
r
r
L( A ) ( t1 ) − L( A ) ( t 0 ) = ∫ M ( A ) dt
t0
4.3.5 Die EULER-Gleichungen (Kreisel-Gleichungen)
& I − ( J II − J III )ωIIωIII
M I = J Iω
& II − ( J III − J I )ωIIIωI
M II = J IIω
& III − ( J I − J II )ωI ωII
M III = J III ω
4.3.6 Kräftefreier Kreisel
r
keine äußeren Momente M S = 0
r
→ L(S ) = {J I ωI , J II ωII , J III ωIII } = const.
Stabilität: Einführung einer kleinen Stöhrung ε=ε(t)
→ Differentialgleichung → Lösung für ε(t) → Stabilitätsuntersuchung
Nur die momentenfreie Drehung um die Hauptachsen mit dem größten bzw. kleinsten Massenträgheitsmoment sind stabil. Die Drehung um die Achse des mittleren Hauptträgheitsmomentes ist
instabil.
Untersuchungen am kräftefreien Kreisel
4.3.7 Der symmetrische, nichtkräftefreie Kreisel
r
r r
r
J 0 0
ωF = ωFx , ωF y , ωFz
ω = ωF + ωRe l = ωFx , ωF y , ωFz + ωEz
[J ]( A ) = 0 J 0
r
ωRe l = 0,0, ωEz
0 0 J III
r
r
dL( A )
r
& Fx + ( J III − J )ωFz + J III ωEz ωFy
M x = Jω
M (A) =
+ ω F × L( A )
dt
& + ( J − J )ω + J ω ω
M = Jω
{
Bez
{
}
y
}
{
Fy
& Fz
M z = J III ω
- Seite 16 -
[
[
III
Fz
III
Ez
]
]
Fx
}
- Gerald Meier: Technische Mechanik Formeln -
Zusammenfassung
1) Ein nichtkräftefreier symmetrischer Kreisel führt eine reguläre Präzessionsbewegung durch, wenn
auf ihn ein konstantes äußeres Präzessionsmoment My = konst. einwirkt.
2) Wird dem Kreisel eine Präzessionsbewegung kinematisch aufgezwungen, so wird wegen actio =
reactio vom Kreisel ein Moment
M yk = − M y
auf die Lagerung ausgeübt.
3) Bei der regulären Präzession des symmetrischen schweren Kreisels liegen Figurenachse,
Winkelgeschwindigkeits- und Drehimpulsvektor sowie raumfeste Präzessionsachse
in einer
r
Ebene. Diese Ebene präzessiert mit der konstanten Winkelgeschwindigkeit ωF um die raumfeste
r
Präzessionsachse. Der Kreisel selbst dreht mit der relativen Eigenwinkelgeschwindigkeit ωRe l
gegenüber dieser Ebene, in der auch das mitgeführte Hauptachsensystem verankert ist.
Während bei kräftefreien Kreisel die Präzessionsbewegung um den raumfesten Drehimpulsvektor
erfolgt, dreht sich bei der Präzession des nichtkräftefreien Kreisels auch der Drehimpulsvektor um
eine raumfeste Präzessionsachse. Die Winkel zwischen den Achsen sind konstant.
- Seite 17 -