Fil_3bis7
Werbung

Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
Nachrichtenübertragungstechnik
11.3 Standardtiefpässe
11.3 Standardtiefpässe
Es werden vor allem vier Typen von Filtern eingesetzt:
Bessel-Thomson
Potenz, auch Butterworth genannt
Tschebyscheff
Cauer
Bei gleicher Filter-Ordnung nimmt bei diesen Filtertypen die Steilheit der Dämpfungszunahme im
Übergangsbereich in der Liste von oben nach unten zu. Damit verbunden ist aber eine
Verschlechterung des Einschwingverhaltens. Die Bessel-Thomson Filter sind optimiert auf günstiges
Einschwingverhalten. Sie zeigen einen optimal flachen Gruppenlaufzeit-Verlauf . Die Sprungantwort
zeigt nur geringes Überschwingen.
Potenzfilter werden erhalten durch Vorgabe des Betrags von H(jω) durch eine glatte
Approximationsfunktion n-ter Ordnung ohne Welligkeit. Bei Tschebyscheff-Filtern weist die
Approximationsfunktion n-ter Ordnung im Durchlaßbereich eine Welligkeit auf (n-relative Extrema).
Cauer-Filter sind versteilerte Tschebyscheff-Filter, was jedoch mit einer zusätzlichen Welligkeit der
Dämpfung im Sperrbereich erkauft wird.
Die Übertragungsfunktionen der Bessel-, Potenz- und Tschbyscheff-Tiefpaßfilter n-ter Ordnung sind
von der Form
1
H ( P) =
c 0 + c1 P + c 2 P 2 + L + c n P n
mit reellen Koeffizienten ci. Der Koeffizient c0 legt die Dämpfung bei der Frequenz Null fest. Die
Koeffizienten ci können auch durch die Pole ersetzt werden.
1
H ( P) =
C ( P − P1 ) L ( P − Pn )
C = Normierungskonstante. Die Pole haben negativen Realteil und sind entweder reell oder treten als
konjugiert komplexe Paare auf. Jedes konjugiert komplexe Polpaar ergibt einen quadratischen Term
im Nenner mit reellen Koeffizienten
P1 , 2 = −α ± j β ⇒
( P − P1 )( P − P2 ) = ( P 2 + 2α P + γ ) mit
γ = α2 + β 2
1
(1 + a 1 P + b1 P )(1 + a 2 P + b2 P 2 ) L
Die Übertragungsfunktionen der Cauer-Tiefpaßfilter n-ter Ordnung sind rationale Funktionen
in P, d.h. sie besitzen zusätzlich zum Polynom n-ten Grades im Nenner auch noch ein Polynom m-ten
Grades (m<n) im Zähler. Daher werden diese Übertragungsfunktionen sowohl durch Pole wie auch
durch Nullstellen beschrieben.
Wir beschreiben im folgenden Potenz-, Tschebyscheff- und Cauer -Filter.
H ( P) =
WS 99/00
2
Seite 17
Nachrichtenübertragungstechnik
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
11.3 Standardtiefpässe
11.3.1
Potenz (Butterworth)
Approximationsfunktion n-ter Ordnung
1
H (Ω ) =
(11.3-1)
1 + A2 n Ω
2n
Mit der Eigenschaft:
1
H (Ω ) =
1 + A2 n Ω
>>1
Ω
→ ∝
2n
a (Ω ) = 20 log
1
Ωn
entspricht
(11.3-2)
n ⋅ 6 dB / Oktave
1
dB = 10 log( 1 + A2 n Ω 2 n )dB
H (Ω )
(11.3-3)
Durch A2n ist die maximale Dämpfung im Durchlaßbereich festgelegt:
aD
a D = a (Ω = 1) = 10 log( 1 + A2 n ) dB
A2 n = 1 ⇒
insbesonde re :
⇒
(11.3-4)
A2 n = 10 10 − 1
a D = 3dB
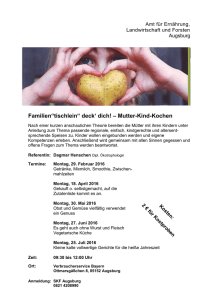
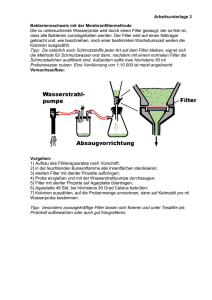
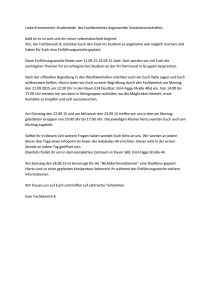
Beispiel: Approximationsfunktionen für A2n = 1 und n = 2, 4, 6 in unterschiedlichen
Darstellungsformen. Erstellung mit MathCad.
Ω
0.2 , 0.3 .. 4
1
H 2( Ω )
1
a 4( Ω )
Ω
1
H 4( Ω )
4
10. log 1
1
Ω
8
a 6( Ω )
10. log 1
1
H 6( Ω )
Ω
8
Ω
1
12
1
a 2( Ω )
10. log 1
Ω
Ω
12
4
100
a 2( Ω )
H 2( Ω )
a 4( Ω )
H 4( Ω ) 0.5
50
a 6( Ω )
H 6( Ω )
0
0
0
2
4
0
2
4
6
Ω
6
Ω
Seite 18
WS 99/00
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
Nachrichtenübertragungstechnik
11.3 Standardtiefpässe
1
100
H 2( Ω )
0.1
a 2( Ω )
H 4( Ω )
0.01
a 4( Ω )
3
a 6( Ω )
H 6( Ω )
1 10
1 10
4
0.1
1
50
0
10
0.1
1
Ω
10
Ω
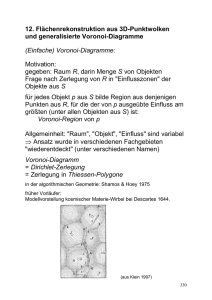
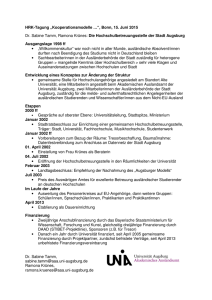
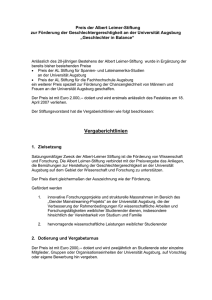
Die Pole der Übertragungsfunktion können als Lösungen der Gleichung
2n
P
1 + A2 n = 0
j
berechnet werden. Die Lösungen liegen in der komplexen Ebene auf dem Rand eines Kreises um
den Ursprung. Für A2n = 1 (aD = 3 dB) ergibt sich der Einheitskreis. Die Pole sind reell oder treten
als konjugiert komplexe Paare auf . Die Lösungen mit negativem Realteil sind die Pole von H(P).
A 2n=1
n=2
Im(P)
Pole
von
H2(P)
n=3
1
Im(P)
Im(P)
Pole
von
H3(P)
1
Re(P)
Re(P)
Pole
von
H4(P)
n=4
1
Re(P)
Übung: Man bestimme die Übertragungsfunktionen für aD = 3 dB und n = 1,2 3, 4 und zerlege sie
in Teilfunktionen 1. und 2. Ordnung.
Lösung:
n = 1 : H ( P)=
1
P +1
entspricht RC - oder LR - Tiefpaß
1
1
=
jπ 5 / 4
(P − e
)( P − e
) 1+ 2P + P 2
1
1
n = 3 : H ( P)=
=
jπ 4 / 6
jπ 8 / 6
( P + 1)( P − e
)( P − e
) (1 + P )(1 + P + P 2 )
1
1
n = 4 : H ( P)=
=
jπ 5 / 8
jπ 7 / 8
jπ 9 / 8
j π 11 / 8
2
(P − e
)( P − e
)( P − e
)( P − e
) (1 + a1 P + b1 P )(1 + a 2 P + b2 P 2 )
mit a1 = 1,8478 b1 = 1 a 2 = 0,7654 b2 = 1
n = 2 : H ( P)=
WS 99/00
jπ 3 / 4
Seite 19
Nachrichtenübertragungstechnik
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
11.3 Standardtiefpässe
11.3.2
Tschebyscheff- Tiefpässe
Ansatz einer Approximationsfunktion mit Welligkeit im Durchlaßbereich, dafür im Übergangsbereich
steiler als Potenzfilter.
Approximationsfunktion n-ter Ordnung
H (Ω ) =
1
(11.3-5)
1 + ε 2 T n 2 (Ω )
Dabei ist Tn(Ω) ein Polynom in Ω vom Grade n , das sog. Tschbyscheff-Polynom . Es gilt |Tn(±1)| =
1 . Wie beim Potenzfilter gilt:
H (Ω )
Ω>>
1→ ∝
a (Ω ) = 20 log
1
Ωn
entspricht
n ⋅ 6 dB / Oktave
1
dB = 10 log( 1 + ε 2 T n 2 ( Ω)) dB
H (Ω )
(11.3-6)
(11.3-7)
Durch ε ist die maximale Dämpfung im Durchlaßbereich festgelegt:
a D = a (Ω = 1) = 10 log( 1 + ε 2 ) dB
aD
⇒ ε 2 = 10 10 − 1
(11.3-8)
insbesonde re :
ε = 1 ⇒ a D = 3dB
Die Tschebyscheff-Polynome sind durch folgende Funktionen definiert:
(11.3-9)
cos( n ⋅ arccos( Ω))
Ω ≤1
T n ( Ω) =
Ω ≥1
cosh( n ⋅ Ar cosh( Ω ))
Zur Bestimmung der Polynome muß man die Definitiongleichung und Regeln für das Potenzieren der
Cosinusfunktion verwenden.:
Beispiel:
cos(arccos ( Ω)) = Ω
Ω ≤1
n = 1 : T1 (Ω ) =
Ω ≥1
cosh( Ar cosh( Ω)) = Ω
n = 2 : T2 (Ω ) = cos( 2 arccos( Ω )) ⇔ y := arccos T2 = 2 arccos Ω
⇒ cos y = T2
⇒
und
cos
y
=Ω
2
1
1
y
(T2 + 1) = (cos y + 1) = cos 2 = Ω 2
2
2
2
Seite 20
⇒ T2 (Ω ) = 2Ω 2 − 1
WS 99/00
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
Nachrichtenübertragungstechnik
11.3 Standardtiefpässe
n
Tn(Ω)
----------------------------1
Ω
2
2Ω 2 – 1
3
4Ω 3 +3Ω
4
8Ω 4 – 8Ω 2 – 1
5
16Ω 5 – 20Ω 3 +5Ω
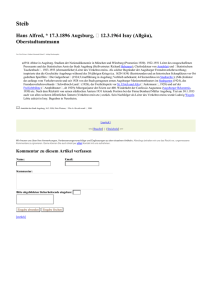
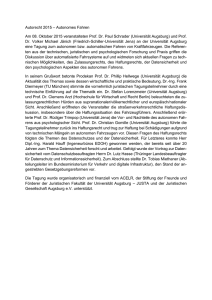
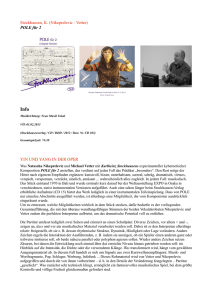
Beispiel: Zeichnen des Dämpfungsverlaufs für normierte Tschebyscheff-Tiefpässe 4. und 5.
Ordnung mit aD = 3 dB durch MathCad.
Ω
0.1 , 0.15 .. 3
1
H 4( Ω )
1
4
8. Ω
H 5( Ω )
1
a 4( Ω )
a 5( Ω )
5
16. Ω
2
8. Ω
1
3
20. Ω
2
1
40
a 4( Ω )
5. Ω
a 5( Ω ) 20
2
20. log H 4( Ω )
0
0.1
1
10
Ω
20. log H 5( Ω )
Man erkennt, daß die Dämpfungsfunktion für n = 4 (allg. geradem n) schon bei der Frequenz Null
einen von Null verschiedenen Dämpfungswert aufweist. Deswegen wurde in der Einleitung zu Kap
9.3 bei der allgemeinen Form der Übertragungsform der Koeffizient c0 nicht notwendigerweise als 1
vorausgesetzt.
Bem.: Bei Tietze-Schenk [] wird bei den Tschebyscheff-Filtern im Gegensatz zu der hier
verwendeten Definition aus Saal []die Grenzfrequenz als 3 dB Abfall von H(f) gegenüber dem Wert
bei Frequenz Null definiert! Daher unterscheiden sich auch die Filterkoeffizienten.
H(Ω)
0
aD
3 dB
Ω
WS 99/00
Seite 21
Nachrichtenübertragungstechnik
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
11.3 Standardtiefpässe
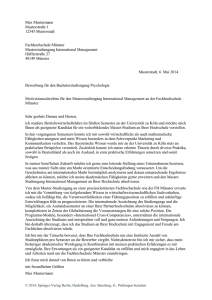
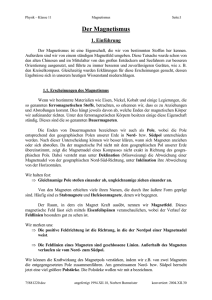
Die Pole der Übertragungsfunktion sind zu berechnen aus den Lösungen der Gleichung
2 P
1 + ε 2 Tn = 0
j
Die Pole liegen in der komplexen Ebene auf Ellipsen um den Ursprung:
n=2
Im(P)
n=3
Pole
von
H2(P)
bn
Im(P)
Im(P)
Pole
von
H3(P)
1
Re(P)
Pole
von
H4(P)
n=4
Re(P)
1
Re(P)
an
k = 1,2, K , n
1
2k − 1
1
2k − 1
Σ k = Re {Pk } = ± sin
π sinh ar sinh = ± sin
πan < 0
ε
2n
n
2n
1
2k − 1
1
2k − 1
Ω k = Im{Pk } = cos
π cosh ar sinh = cos
π bn
ε
2n
n
2n
Beispiel:
H(P) für ε = 0,5 und n = 2 , 3:
1
H 2 (P ) = 2
P + 1,1118P + 1,1118
H 3 (P ) =
1
2P + 2 P + 2,5P + 1
3
Seite 22
2
WS 99/00
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
11.3.3
Nachrichtenübertragungstechnik
11.3 Standardtiefpässe
Cauer-Tiefpässe
Bei Cauer-Tiefpässen erfolgt sowohl im Durchlaß- wie auch im Sperrbereich die Approximation im
Tschebyscheff‘schen Sinne. Dadurch ergibt sich eine Versteilerung des Übergangsbereichs. Die
Übertragungsfunktion wird durch Pole und Nullstellen charakterisiert.
Beispiel 5. Ordnung
Im(P)
0
aD
H(Ω)
n=5
Pole
aS
a
1
Ωs
Nullstellen
1
Re(P)
Ω
Die folgende Abbildung aus Meinke/ Gundlach [1] zeigt den Dämpfungsverlauf für Potenz-,
Tschebyscheff- und Cauer-Tiefpässe 5.Ordnung.
Reale Bauteile weisen Verluste auf, die zu einem veränderten Dämpfungsverlauf führen: im
Durchlaßbereich ist die Dämpfung etwas höher und im Sperrbereich niedriger, die Stellen mit
unendlich großer Dämpfung werden nicht erreicht.
WS 99/00
Seite 23
Nachrichtenübertragungstechnik
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
11.4 Beispiel zum LC-Filterentwurf
11.4 Beispiel zum LC-Filterentwurf
Aufgabe : Man entwerfe ein TP-Filter in LC-Schaltung mit R1 = 600 Ω und einer maximalen
„Echodämpfung“ von 14 dB im Durchlaßbereich bis fg = 20 kHz, a > 36 dB ab 40 kHz und
Tschebyscheff-Charakteristik.
Lösung mit Tabellen aus Saal [3 ] im Anhang:
Die Echodämpfung ist ein logarithmisches Maß für den Reflexionsfaktor. Daraus bestimmen wir
zunächst den maximalen Reflexionsfaktor und die maximale Dämpfung im Durchlaßbereich.
a E = −20 log ρ
ρ = 10 − aE / 20 = 0,1995 ( 20%)
a D = −20 log H B = −20 log 1 − ρ 2 = 0,1764dB
Nach Diagramm : a( ρ) = 13,8dB für
⇒ a s + a ( ρ) = 50dB bei 1 / Ω s = 1 / 2
Für Struktur A
r1
ρ = 20%
⇒ n = 5 Tabelle
l2
l4
c1
c3
c5
C 0520
r2
liest man die normierten Bauelementewerte ab:
r1 = 1, r2 = 1
ν
c2ν-1
l2ν
-----------------------------------------------------1
1,301894
1,345558
2
2,128570
1,345558
3
1,301894
Daraus können die realen Bauelementewerte durch Entnormierung gewonnen werden.
L = lL B
C = cC B
R = rRB
R
1
mit
L B = 1 = 4,7746 mH
CB =
= 13, 2621 nF
R B = R1 = 600 Ω
ωg
ωg R1
Seite 24
WS 99/00
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
Nachrichtenübertragungstechnik
11.5 Frequenztransformationen
11.5 Frequenztransformationen
Hochpässe
1
ergibt im logarithmischen Frequenzmaßstab eine um die
Ω TP
Grenzfrequenz Ω = 1 (log 1 = 0) gespiegelte Frequenzachse. Setzt man in die Tiefpaß1
Approximationsfunktion Ω TP =
ein, so ergibt sich eine Hochpaß-Approximationsfunktion, da
Ω HP
nun die Funktionswerte H(Ω) im logarithmischen Frequenzmaßstab bezüglich der Grenzfrequenz
gespiegelt auftreten .
Die Transformation Ω TP → Ω HP =
H(Ω)
H(Ω)
0
0
logΩ TP
0
logΩ HP
logΩ HP =-logΩ TP
Beispiel:
H TP ( Ω) =
1
1 + Ω 2n
⇒
H HP (Ω ) =
1
1
1+
Ω
2n
=
Ωn
1 + Ω2n
Die Bildvariable wird
j
1
1
wegen j Ω HP =
=−
unter der Frequenztransformation in PHP = −
übergeführt. Da
Ω TP
jΩ TP
PTP
1
H (−Ω ) = H (Ω ) wird vereinfachend die Transformation PHP =
genommen.
PTP
Beispiel:
1
1
P2
H TP ( P) = 2
⇒ H HP ( P) =
=
2
P + 2P +1
P2 + 2P +1
1
1
+ 2 +1
P
P
Die Übertragungsfunktion eines Potenz-Hochpasses 2. Ordnung hat dieselben Pole wie der
1
1
zugehörige Tiefpaß ( P1 , 2 = −
±j
) aber zusätzlich noch eine doppelte Nullstelle bei
2
2
P = 0.
WS 99/00
Seite 25
Nachrichtenübertragungstechnik
11.5 Frequenztransformationen
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
Setzt man die TP à HP Transformation der Variablen P in die normierten Impedanzwerte ein, so
ergibt sich die Impedanztransformation:
1
1
1
(11.5-1)
z LTP = Pl ⇒ z HP = l TP =
mit c HP =
P
Pc HP
l TP
1
P
1
z TP =
⇒ z HP =
= PlHP mit l HP =
PcTP
cTP
c TP
lTP
cHP=1/lTP
cTP
TP à HP
lHP=1/cTP
Beispiel : Man entwerfe ein TP-Filter in LC-Schaltung mit R1 = 600 Ω und einer maximalen
„Echodämpfung“ von 14 dB im Durchlaßbereich für f > fg = 12 kHz, und a > as = 36 dB für
f < fs = 6 kHz mit Tschebyscheff-Charakteristik.
Lösung: Der Hochpaß wird auf den entsprechenden Referenz Tiefpaß- transformiert. Es ergibt sich
mit Ω sTP = 1/ Ω sHP = 2, daß der Referenz-Tiefpaß derselbe ist, wie in dem Beispiel aus 9.4.
Deswegen können von dort die normierten Tiefpaß-Bauelemente Werte übernommen werden.
Diese sind zu invertieren und geben dann die dualen Hochpaßbauelemente-Werte. Durch
Entnormierung berechnet man die realen Bauelemente-Werte.
Bandpässe
2
Ω TP
Ω
Die Transformation Ω TP → Ω BP =
∆Ω + 1 + TP ∆Ω führt die gesamte
2
2
Frequenzachse ( negativer und positiver Bereich) in die positive Frequenzachse über. Setzt man die
1
1
Ω BP −
, in die TPUmkehrung dieser Transformation , nämlich Ω TP =
∆Ω
Ω BP
Approximationsfunktion ein, so ergibt sich die entsprechende Bandpaß-Approximationsfunktion.
Dabei ist
f B = f o ⋅ f u =Bezugsfreq uenz = Resonanzfr equenz
B = fo − fu
normiert :
=Bandbreite,
Ω=
f
fB
Q=
∆Ω =
fB
B
= Güte
B
1
= Ωo − Ω u =
fB
Q
Seite 26
WS 99/00
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
Nachrichtenübertragungstechnik
11.5 Frequenztransformationen
Durch Einsetzen erkennt man, daß folgende Frequenzen ineinander übergehen:
Ω BP
Ω TP
-------------------------0
-∞
HTP(Ω)
1
0
∞
∞
Ωu
-1
Ω0
1
Ω TP
1
-1
HBP (Ω)
Ω BP
0
Ωu
Ωo
1
Bei logarithmischem Maßstab der Frequenzachse ist die Bandpaßfunktion symmetrisch zur
Resonanzfrequenz fr.
Beispiel: Potenztiefpaß 2.Ordnung geht über in Bandpaß 4. Ordnung :
H TP ( Ω) =
1
1+ Ω 4
⇒
H BP ( Ω) =
1
1
1
1 +
Ω −
Ω
∆Ω
4
Bildvariable:
1
1
Ω BP −
j Ω TP = j
∆Ω
Ω BP
1
1
⇒ j Ω TP =
j Ω BP +
∆Ω
j Ω BP
Impedanztransformation:
TPà BP
lBP =lTP/∆Ω
lTP
⇒
PTP =
1
1
PBP +
∆Ω
PBP
cBP =∆Ω/lTP
cTP
cBP =c TP/∆Ω
WS 99/00
Seite 27
lBP =∆Ω/cTP
Nachrichtenübertragungstechnik
11.6 Aktive Filter
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
11.6 Aktive Filter
Die besprochenen Approximationsfunktionen können nicht nur mit passiven LC-Schaltungen
realisiert werden, sondern auch mit Schaltungen, die ohne Spulen auskommen, sog. aktiven Filtern.
Sie bestehen aus RC-Filtern, bei denen in der Schaltung über Operationsverstärker (OP)
Rückkopplungen hergestellt werden.
Mit RC-Filtern alleine gelingt es nämlich nicht, den Übergang zwischen Durchlaß- und Sperrbereich
so stark gekrümmt zu gestalten wie es für die Approximationsfunktionen
charakteristisch ist. In den LC-Reaktanzschaltungen bilden die unterschiedlichen Energie-Speicher,
Kondensator und Spule, eine Resonanzsystem, das die Formung des Übergangsbereiches erst
möglich macht. Bei aktiven Filtern wird der Wegfall des zweiten Speichertyps (den Spulen) durch
Rückkopplungen wettgemacht. Die über OP’s rückgekoppelten RC-Glieder besitzen die gleichen
Möglichkeiten zur selektiven Erregung bei Resonanz wie die LC-Schaltungen.
Die Abb. zeigt die Verhältnisse für ein TP-Filter 2. Ordnung.
Reaktanzfilter
à
aktives Filter
R1
L
R2
+
C
→
C1
C2
-
Die aktive Schaltung besteht aus einem zweifachen RC-Glied, dessen erster Kondensator nicht auf
dem gemeinsamen Nullpotential liegt, sondern über eine Rückkopplung mit dem Ausgangssignal der
Kette verbunden ist. Die Rückkopplung erfolgt über eine Spannungsfolger- Schaltung mit einem
Operationsverstärker.
Für f >> fg ist das Ausgangssignal an dem zweifachen RC-Glied sehr klein und damit liegt der
Fußpunkt des ersten RC-Gliedes nahezu auf Masse. Die Schaltung wirkt wie zwei hintereinander
geschaltete RC-Glieder. Im Übergangsbereich in der Nähe der Grenzfrequenz wird der Einfluß des
rückgekoppelten Signals immer stärker, so daß hier eine Anhebung des Dämpfungsverlaufes wie bei
dem LC-Reaktanzfilter möglich wird.
Vorteile aktive Filter
•
•
•
•
•
keine Spulen
Von vielen Herstellern werden IC’s geliefert (MAXIM, AD), bei Einbau ist nur mehr äußere
Beschaltung mit R und C vorzunehmen
klein, billig, zuverlässig
Filter-Eigenschaften leicht einstellbar und veränderbar
Einsatz bis zu niedrigen Grenzfrequenzen (< 1Hz)
Seite 28
WS 99/00
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
Nachrichtenübertragungstechnik
11.6 Aktive Filter
Einschränkungen wegen OP
•
•
•
•
•
zu hohen Frequenzen nur bis ca. fg = 100 kHz (250 kHz) einzusetzen
≤ 8. Ordnung, sonst Schwingen der Schaltung
schlechteres Rauschverhalten als passives Filter
empfindlicher gegenüber Bauteile-Toleranzen
es können nur Signale mit niedrigen Leistungen verarbeitet werden
Realisierung häufig durch Kaskadierung von Stufen 2. und 1. Ordnung mit Einfachrückkopplungen.
Es gibt aber auch kompliziertere Strukturen mit Mehrfachrückkopplungen (z.B. das sog
Zustandsvariablen-Filter : siehe Tietze Schenk [6]oder von Wangenheim [7])
Tiefpaß: Sallen & Kay Struktur 2. Ordnung
C2
R1
R2
+
ue
C1
ua
(k-1)R3
R3
Übertragungsfunktion:
H ( p) =
k
1 + [C1 ( R1 + R2 ) + (1 − k ) R1 C2 ] p + R1 R2 C1 C 2 p 2
k
H ( P) =
1 + [C1 ( R1 + R2 ) + (1 − k ) R1 C 2 ]ωg P + R1 R2 C1 C 2 ωg P
=
A0
2
mit
2
≡
p
ωg
A0
( P − P1 )( P − P2 )
mit
P = −α ± j β
γ = α2 + β 2
P + 2α ⋅ P + γ
A0 / γ
bA0
=
≡=
2α
1
1 + a ⋅ P + bP 2
1+
⋅ P+ ⋅P2
γ
γ
2
P=
mit
mit
a=
2α
,
γ
b=
1
γ
bA0 = Verstärkung bei Frequenz Null. Die Zielübertragungsfunktion wurde zunächst durch ihre Pole
dargestellt und dann durch Ausmultiplizieren der Linearfaktoren in eine Form gebracht, aus der durch
Koeffizientenvergleich die Bauteilewerte ermittelt werden können.
Durch Koeffizientenvergleich ergibt sich ein überbestimmtes Gleichungssystem, bestehend aus 3
Gleichungen mit den 5 Unbekannten R1, R2, C1, C2, und k..
WS 99/00
Seite 29
Nachrichtenübertragungstechnik
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
11.6 Aktive Filter
bA0 = k
[C1 ( R1 + R2 ) + (1 − k ) R1C2 ]ωg = a
R1 R2 C1C2ωg = b
2
Zwei Lösungsvarianten für unterschiedliche Realisierungen:
a) Wahl : k=1
bA0 = k ,
[C1 ( R1 + R 2 ) ]ωg = a ,
R1 R 2 C1 C 2 ωg 2 = b
Wahl :
R1 = R 2 = R
( z .B. 10 kΩ)
(11.6-1)
a
2ωg R
⇒ C1 =
C2 =
2b
aωg R
In der Schaltung entfallen die Widerstände (1-k)R3 und R3 .
C2
+
R1
R2
b) Wahl : R1 = R2 = R, C1 = C2 = C
[2CR + (1 − k ) RC ]ωg = a,
( RCωg ) 2 = b
(11.6-2)
a
b
Die Widerstände oder Kondensatoren können in dieser Schaltungsvariante als Drehpotis oder DrehKondensatoren mit gemeinsamer Achse ausgeführt werden. Der Filtertyp wird durch den Wert des
Widerstandes (k-1) R3 fest eingestellt. Die Grenzfrequenz des Filters kann durch Verstellen von C
oder R variiert werden. Diese Schaltungsvariante ist z.B. günstig für einstellbare Filter in
Audioequipment.
⇒
RC =
b
,
ωg
C1
k = 3−
Hochpaß: Sallen & Kay Struktur 2. Ordnung
R2
C1
C2
+
ue
R1
-
ua
(k-1)R3
R3
Seite 30
WS 99/00
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
H ( p) =
Nachrichtenübertragungstechnik
11.6 Aktive Filter
k R1R2C1C2 p 2
1 + [R2 (C1 + C2 ) + (1 − k )R2C1 ] p + R1 R2 C1C2 p 2
k R1R2C1C2ω g P 2
mit
P=
2
H ( P) =
1 + [R2 (C1 + C2 ) + (1 − k ) R2 C1 ]ω g P + R1 R2 C1C2ω g 2 P2
≡
p
ωg
bA∞
A∞ P 2
=
⇒
2
1 2 a
1
1
P
+
P
+
1
1 + a ⋅ + b
b
b
P P
k R1 R2 C1C2ω g = A∞
2
R1 R2 C1C2ω g =
2
1
b
[R2(C1 + C2 ) + (1 − k )R2C1]ω g = a
b
Wahl : k = 1 und C1 = C 2 = C ( z.B : 10nF )
2
a
[R2 2C]ωg = a
⇒
R1 =
R2 =
b
aCωg
b2Cωg
(11.6-3)
In der Schaltung entfallen wieder die Widerstände (1-k)R3 und R3 .
Beispiel: Man entwickle ein Hochpaßfilter mit aktiven Schaltungselementen und folgender
Spezifikation: a < aD = 3 dB für f > fg = 1 kHz und a > 10 dB für f < fs = 800 Hz.
Das Filter soll günstiges Impulsübertragungsverhalten aufweisen.
Lösung :
Für günstiges Impulsübertragungsverhalten wählen wir Potenzcharakteristik. Zur Bestimmung der
Ordnung führen wir die Hochpaß-Tiefpaß Frequenz-Transformation aus und berechnen die
Dämpfung für verschiedene n:
1
Ω s ,TP =
a s = 10 log( 1 + Ω s 2 n ) dB
0,8
n = 5 ⇒ a s = 10 log( 1 + 1.2510 ) dB = 10,13dB
Die Übertragungsfunktion 5. Ordnung zerlegen wir in Terme 1. und 2. Ordnung. Dadurch kann die
Übertragungsfunktion in ein Produkt aus zwei Übertragungsfunktionen mit zweiter Ordnung und
einer mit erster Ordnung zerlegt werden.
Pole TP : P1 = −α1 P2 , 3 = −α2 ± j β2 P4 ,5 = −α3 ± jβ3
H TP ( P ) =
C
=
2
( P + α1 )( P + 2α2 P + γ 2 )( P 2 + 2α3 P + γ 3 )
1
=
(1 + a1 P)(1 + a 2 P + b2 P 2 )(1 + a 3 P + b3 P 2 )
2α
1
1
γ i = αi 2 + βi 2 , a i = i bi =
i = 1,2 a1 =
γi
γi
γ1
Wegen der Rückwirkungsfreiheit der aktiven Schaltungen können wir zur Realisierung die
entsprechenden aktiven Filterschaltungen erster und zweiter Ordnung hintereinander schalten. Wir
müssen uns noch die Realisierung der Schaltung erster Ordnung überlegen. Dazu nehmen wir einen
CR-Hochpaß erster Ordnung mit nachgeschaltetem Spannungsfolger.
WS 99/00
2
2
Seite 31
Nachrichtenübertragungstechnik
Fachhochschule Augsburg
Fachbereich Elektrotechnik
Prof. Dr. C. Clemen
11.7 Switched-Capacity Filter
H HP ( p ) =
H HP ( P) =
R
R+
1
pC
=
pRC
1 + pRC
Pωg RC
1 + Pωg RC
≡
1
(11.6-4)
=
P
a
P
=
a+P
⇒
RC =
1
ωg a
1
P
1+
P
a
Die Filterkoeffizienten entnehmen wir der Tabelle aus Tietze Schenk [] und erhalten für die drei
Filterstufen folgende Dimensionierung :
C = Cii = 10 nF
i
ai
bi
Ri1/kΩ
Ri2/kΩ
-------------------------------------------------------------------------1
1,0000
0,0000
15,9155
2
1,6180
1,0000
19,6734
12,8576
3
0,6180
1,0000
51,5065
4,9178
1+ a
11.7 Switched-Capacity Filter
Realisierungsvariante der aktiven Filter, bei der die Widerstände durch geschaltete Kapazitäten
ersetzt sind.
Vorteile
• besser in mikroelektronischer IC-Technik zu realisieren.
• Widerstandswerte durch Taktfrequenz einstellbar
• genau
• reproduzierbar
Besondere Eigenschaften:
Abtastsystem, daher ist ein analoges Anti-Aliasing Filter vorzuschalten. Da die Taktfrequenz des SCFilters um den Faktor 50 bis 100 mal über der Grenzfrequenz liegt, genügt ein Filter 2. Ordnung.
i
u
i
u
R
fS
CS
∆q
uC S
u
=i =
= uCS ⋅ f S ≡
∆t
TS
R
Seite 32
⇒
R=
1
(11.7-1)
CS f S
WS 99/00