Diploma Thesis - DESY
Werbung

Reflektive Optik für Messungen des longitudinalen
Phasenraums eines niederenergetischen Elektronenstrahls
Diplomarbeit
Humboldt-Universität zu Berlin
Mathematisch-Naturwissenschaftliche Fakultät I
Institut für Physik
eingereicht am 21. Juli 2008
überarbeitete Fassung 20. Dezember 2008
von Kilian Rosbach
geb. am 6. Mai 1981 in Bonn
Vorbemerkung zur überarbeiteten Fassung
Die Korrekturen und Hinweise von Prof. Kolanoski und Dr. Husemann wurden in dieser
überarbeiteten Fassung berücksichtigt. Es handelt sich dabei im Wesentlichen um kleine
Verbesserungen, es gab keine grundlegenden inhaltlichen Änderungen. Die Kapitel 4 und 5
der eingereichten Fassung wurden zusammengelegt. Abbildung 4.14 (vorher 5.2) wurde
durch eine übersichtlichere Darstellung ersetzt. In der hier zugrunde liegenden Auswertung
wurde für jede Linse ein Korrekturfaktor hinzugefügt, der dazu dient, die Messwerte der
relativen Transmission auf maximal 1 zu begrenzen. In Abbildung 5.2 (vorher 6.2) wurden
zur besseren Verständlichkeit weitere Strahlverläufe eingezeichnet. Anhang B gibt einen
kurzen Überblick über die neuen Erkenntnisse seit Abgabe der Diplomarbeit.
Kilian Rosbach im Dezember 2008
Inhaltsverzeichnis
1
Einleitung und Überblick
1
2
Der Photoinjektor PITZ
2.1 Erzeugung und Beschleunigung des Elektronenstrahls
2.2 Diagnose der Strahleigenschaften . . . . . . . . . . . .
2.2.1 Transversale Eigenschaften . . . . . . . . . . .
2.2.2 Longitudinale Eigenschaften . . . . . . . . . . .
2.3 Simulationen . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
2
2
6
6
7
8
.
.
.
.
.
.
.
.
.
.
.
.
9
9
9
11
13
13
14
Das derzeitige optische Übertragungssystem
4.1 Experiment: Messung der Elektronenpaket-Länge . . . . . . . . . . . . .
4.1.1 Einfluss der Dispersion auf die gemessene Elektronenpaket-Länge
4.2 Simulation der Messung: Photoinjektor . . . . . . . . . . . . . . . . . . .
4.3 Simulation des optischen Übertragungssystems . . . . . . . . . . . . . .
4.3.1 Dispersion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2 Absorption, Reflektion, Streuung . . . . . . . . . . . . . . . . . .
4.4 Probleme des derzeitigen Systems . . . . . . . . . . . . . . . . . . . . . .
4.5 Andere Ansätze mit refraktiver Optik . . . . . . . . . . . . . . . . . . .
4.6 Motivation: Reflektive Optik . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
15
16
17
19
20
20
25
25
27
29
.
.
.
.
31
31
32
35
36
Numerische Untersuchung optischer Systeme
6.1 Ergebnisse der kommerziellen Software . . . . . . . . . . . . . . . . . . . .
40
40
3
4
5
6
Longitudinale Diagnostik
3.1 Entstehung optischer Signale . . . .
3.1.1 Cherenkov-Effekt . . . . . . .
3.1.2 Optische Übergangsstrahlung
3.2 Das optische Transportsystem . . . .
3.3 Streak-Kamera . . . . . . . . . . . .
3.4 Alternative: RF-Deflektor . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Grundlagen abbildender Systeme
5.1 Paraxiale Näherung . . . . . . . . . . . . . . . . . . . . .
5.2 Korrekturen höherer Ordnung, Seidel-Aberrationen . . . .
5.3 Stigmatische und aplanatische Abbildungen, Lichtlaufzeit
5.4 Kartesische Reflektoren . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
i
ii
Inhaltsverzeichnis
6.2
6.3
6.4
6.5
.
.
.
.
.
.
.
.
.
41
43
44
44
45
46
46
47
48
7
Abbildung mit klassischen Spiegelteleskopen
7.1 Cassegrain-Teleskop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Gregory-Teleskop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Schwarzschild-Teleskop . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
49
59
61
8
Abbildung mit Parabolspiegel-Teleskopen
8.1 Untersuchung des einfachen Parabolspiegelsystems
8.2 Variationen des Spiegelteleskops . . . . . . . . . . .
8.2.1 Brennweite eines gedrehten Parabolspiegels
8.2.2 Untersuchung der Abbildungsqualität . . .
8.3 Verkettung von On-Axis-Parabolspiegeln . . . . . .
8.4 Fazit: On-Axis-Parabolspiegel . . . . . . . . . . . .
8.5 Simulation von Off-Axis-Parabolspiegeln . . . . . .
8.6 Fazit: Off-Axis-Parabolspiegel . . . . . . . . . . . .
.
.
.
.
.
.
.
.
64
64
67
69
70
73
74
75
77
Zusammenfassung und Ausblick
9.1 Vergleich der untersuchten Systeme . . . . . . . . . . . . . . . . . . . . . .
9.2 Eingangsoptiken, Anpassung an die Streak-Kamera . . . . . . . . . . . . .
9.3 Nächste Schritte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
79
79
80
9
Überprüfung mit C++-Programm . . . . . . . . . . . .
Einschränkungen, Beugung . . . . . . . . . . . . . . . .
Modellierung von Cherenkov-Licht . . . . . . . . . . . .
Design-Spezifikation und ihre numerische Untersuchung
6.5.1 Räumliches Auflösungsvermögen . . . . . . . . .
6.5.2 Zeitliches Auflösungsvermögen . . . . . . . . . .
6.5.3 Minimierung von Lichtverlusten . . . . . . . . . .
6.5.4 Längeneffizienz . . . . . . . . . . . . . . . . . . .
6.5.5 Machbarkeit . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Literaturverzeichnis
81
A Anhang
86
B Neue Erkenntnisse
88
1 Einleitung und Überblick
Zum Betrieb eines Freie-Elektronen-Lasers (FELs) nach dem Prinzip der selbstverstärkenden spontanen Emission („Self-Amplified Spontaneous Emission“, SASE) ist ein gepulster Elektronenstrahl hoher Güte erforderlich. Am Photoinjektor-Teststand in Zeuthen
(PITZ) [Flö99] wird ein Elektronenstrahl erzeugt, dessen Qualität zum Betrieb der FELAnlage FLASH (Freie-Elektronen-LAser in Hamburg) [FLA08] ausreicht. Eine bei PITZ
vorbereitete und charakterisierte Elektronenquelle wird dort erfolgreich eingesetzt. Noch
höhere Anforderungen an den Elektronenstrahl stellt der Europäische Röntgenlaser (European X-Ray Free-Electron-Laser, XFEL) [XFE08], der 2012 ebenfalls in Hamburg in
Betrieb gehen soll. Bei PITZ wird daher nach Verbesserungsmöglichkeiten bei allen an
der Erzeugung des Elektronenstrahls beteiligten Komponenten gesucht: dem Laser, der
Photokathode und dem Hohlraumresonator.
Der größte Teil der Anlage besteht aus Diagnosestationen zur Untersuchung der erzeugten
Elektronenpakete, einige davon werden in Kapitel 2 vorgestellt. Von besonderem Interesse ist in dieser Diplomarbeit die longitudinale Diagnostik, also die Untersuchung der
zeitlichen Struktur der Elektronenpakete (Kapitel 3). In dem bei PITZ verwendeten Verfahren ist der Transport eines optischen Signals wie zum Beispiel Cherenkov-Licht durch
ein optisches System über eine Distanz von etwa 30 m erforderlich. Eine Messung mit
dem derzeitigen optischen System wird in Abschnitt 4.1 beschrieben und Simulationsergebnissen gegenübergestellt (Abschnitte 4.2 und 4.3). Dabei wird der größte Nachteil
dieses Systems deutlich: die Verfälschung der zeitlichen Struktur des Signals durch Dispersion in den Linsen. Anschließend wird erläutert, warum Ansätze mit reflektiver Optik
möglicherweise zu besseren Resultaten führen können.
Der Hauptteil der Arbeit befasst sich daher mit Abbildungen durch Spiegelsysteme. Wesentliche Grundlagen der geometrischen Optik werden in Kapitel 5 zusammengestellt. Ein
großer Teil der Untersuchungen der Spiegelsysteme erfolgt durch numerische Methoden
(Kapitel 6), die Ziel-Spezifikationen werden zusammen mit geeigneten numerischen Kriterien formuliert (Abschnitt 6.5). Klassische Spiegelteleskope mit Abbildungsmaßstab 1,
die sich zum Transport über lange Strecken eignen, werden in Kapitel 7 eingehend untersucht. Ihre aus der Simulation erwarteten Eigenschaften werden angegeben. Systeme mit
kommerziell erhältlichen Parabolspiegeln wurden in Simulationen und Messungen untersucht (Kapitel 8). Für nicht-mittig ausgeschnittene Segmente eines Parabolspiegels erwartet man aus der Simulation hervorragende Ergebnisse (Abschnitt 8.5). Die vorgestellten
Systeme werden miteinander verglichen, und ein Ausblick auf die nächsten Schritte der
Untersuchung wird gegeben (Kapitel 9).
1
2 Der Photoinjektor PITZ
Die Idee der vorliegenden Diplomarbeit entstand am Photoinjektor-Teststand in Zeuthen
(PITZ) [Flö99] und aus den dortigen Gegebenheiten und Anforderungen heraus. Daher
soll in diesem einleitenden Kapitel ein Überblick über PITZ gegeben werden. Der Aufbau
der Anlage ist in Abbildung 2.1 zu sehen.
Aufgaben von PITZ
Am Photoinjektor Teststand in Zeuthen werden Elektronenquellen untersucht, deren Qualität sich zum Betrieb eines SASE-FELs [Bon84] eignet. Die Erzeugung des Elektronenstrahls wird in Abschnitt 2.1 beschrieben, ein Überblick über Methoden der Strahldiagnostik wird in Abschnitt 2.2 gegeben. Zum Verständnis der Strahldynamik werden Messdaten
häufig entsprechenden Simulationsergebnissen gegenübergestellt. Die dabei verwendete
Software Astra wird in Abschnitt 2.3 vorgestellt.
Der Freie-Elektronen Laser in Hamburg (FLASH) [FLA08] wird bereits erfolgreich mit
einem bei PITZ vorbereiteten und charakterisierten Hohlraumresonator (auch Kavität
genannt) betrieben. Es dauert häufig einige Monate, bis die Kavität mit voller Leistung
betrieben werden kann, da die Leistung und Dauer der Hochfrequenz-Pulse, die in die
Kavität eingekoppelt werden, nur in kleinen Schritten erhöht werden kann. Dies sorgt vor
allem für eine schrittweise Reinigung und Entgasung der Oberflächen. Nach erfolgreicher
Konditionierung werden die Strahlparameter gemessen und optimiert.
Für den Europäischen Röntgenlaser (XFEL) [XFE08], welcher zur Zeit in Hamburg gebaut
wird, soll die Strahlqualität noch weiter verbessert werden. PITZ wird dazu in mehreren
Schritten um neue Komponenten erweitert, vorhandene Komponenten werden optimiert.
2.1 Erzeugung und Beschleunigung des Elektronenstrahls
Die Erzeugung des Elektronenstrahls beruht auf dem Photoeffekt. Laserpulse werden geeignet geformt und auf eine Photokathode geschossen. An der Kathodenoberfläche treten
Elektronen aus, die in ihrer räumlichen und zeitlichen Anordnung im Wesentlichen der
Photonenverteilung des Laserpulses entsprechen. Da es sich bei Elektronen um geladene
Teilchen handelt, tritt eine starke gegenseitige Abstoßung auf, die zu einer Vergrößerung
von Strahldurchmesser und Divergenz führt, und auch zu einer Verlängerung des Elektronenpakets führen kann. Aufgrund dieser Abstoßung kann sich die Qualität des Strahls
nach seiner Erzeugung nur noch verschlechtern, daher ist die Optimierung der Quelle von
größter Bedeutung.
2
2.1 Erzeugung und Beschleunigung des Elektronenstrahls
3
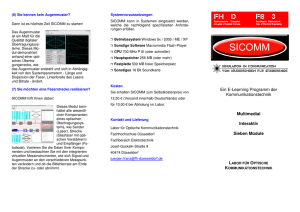
Abbildung 2.1: Schema der PITZ-Anlage im Sommer 2007.
Die Elektronenquelle (GUN, oben rechts) erzeugt den Elektronenstrahl, es folgt die Diagnostik des niederenergetischen Elektronenstrahls (LOW), eine weitere Beschleunigungseinheit (die
Tesla-Kavität, BOOSTER) und weitere Diagnostikstationen (HIGH1 und HIGH2). Besonders interessieren in dieser Arbeit diejenigen Diagnose-Stationen, die eine Untersuchung mit der StreakKamera (Abschnitt 3.3) vorsehen: Das erste Dipol-Spektrometer (DISP1), und die Schirmstationen
LOW.Scr3 und HIGH1.Scr2, und ab 2008 auch das zweite Dipol-Spektrometer (DISP2).
Für den ultra-relativistischen Grenzfall v = c würden sich die Abstoßung durch die
Coulomb-Kraft und die Anziehung durch die Lorentzkraft (Magnetfeld einer bewegten
Punktladung) gegenseitig exakt aufheben. Man beschleunigt die Elektronen daher nach
ihrem Austritt aus der Kathode mit einer Kavität, die unmittelbar an die Kathode anschließt, auf 6 − 7 MeV (γ = mEe c2 ≈ 13, β = vc ≈ 1). Um der anfänglichen starken Zunahme des Strahldurchmessers entgegen zu wirken, wird ein Solenoidmagnet verwendet. Die
Elektronenquelle, bestehend aus Kavität, Kathode und Solenoid, ist in Abbildung 2.2 zu
sehen. Mit einer zusätzlichen Beschleunigungskavität kann die Strahlenergie auf derzeit
bis zu 16 MeV erhöht werden.
Für die Strahlerzeugung sind die Eigenschaften von Laser, Photokathode und Hohlraumresonator maßgeblich, die wichtigsten sollen im Folgenden vorgestellt werden.
Laser
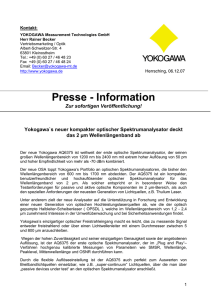
Das PITZ-Lasersystem, entwickelt am Max-Born-Institut Berlin [Wil05], erzeugt in mehrstufiger Verstärkung Laserpulse mit einer Wellenlänge von 262 nm und einer Energie von
∼10 µJ. Das zeitliche Profil der Pulse ist trapezförmig, mit Anstiegs- und Abfallszeiten von etwa 6–8 ps (nach Ausbau 2008: 2 ps) und einer Halbwertsbreite (FWHM) von
rund 20 ps. Ein Beispiel dieses sogenannten Flat-Top-Profils ist in Abbildung 2.3 gezeigt. Durch Aufweitung des Strahls und Herausschneiden des zentralen Teils wird eine
kreisförmige und homogene transversale Verteilung erzeugt. Dabei stehen Aperturen verschiedener Größe zur Verfügung und können ferngesteuert eingesetzt werden. Der Laser
4
2 Der Photoinjektor PITZ
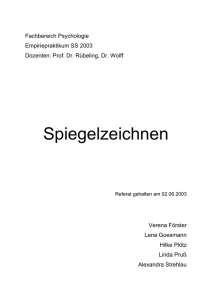
Abbildung 2.2: Die am PITZ verwendete 1,5-zellige Kupfer-Kavität (1). Die Photokathode wird an der Rückseite eingesetzt (rot markierter Bereich). Ebenfalls dargestellt sind das System zur koaxialen Einkopplung der Hochfrequenz (2), der Solenoid-Magnet zur Strahlfokussierung (3) und der
Kompensationsmagnet (4), der das Magnetfeld des Hauptsolenoiden auf
der Kathodenoberfläche kompensiert.
generiert lange Pulszüge von bis zu 800 Pulsen im Abstand von 1 µs und einer Wiederholrate von 1 − 10 Hz. Durch einen kleinen Spiegel innerhalb des Strahlrohrs wird er auf
die Photokathode gelenkt.
Photokathode
Zur Strahlerzeugung werden Kathoden aus Molybdän (Mo) mit einer dünnen Cäsiumtellurid-Schicht (Cs2 Te) verwendet, in Konditionierungsphasen ohne Strahlerzeugung verwendet man nur den Träger aus Molybdän. Durch eine spezielle Vorrichtung kann die
Kathode ausgetauscht werden, ohne das Vakuum im Beschleuniger zu verlieren.
Die Bandstruktur von Cs2 Te führt dazu, dass die Elektronen mit einer mittleren kinetischen Energie von 0,55 eV emittiert werden. Aus dieser (ungeordneten) Energie ergibt
sich ein Beitrag zur Strahlemittanz, welcher thermische Emittanz genannt wird [Flö97],
[Led07a]. Emittanz wird im Folgenden noch genau definiert (Abschnitt 2.2.1). Eine weitere
wichtige Größe zur Beschreibung einer Kathode ist das Verhältnis von ElektronenpaketLadung und Laserenergie (Quanteneffizienz, QE). Durch Wiederholung einer solchen Messung für verschiedene Laserpositionen auf der Kathode erhält man eine QE-Karte. Untersuchungen der chemischen Zusammensetzung des Kathodenmaterials durch RöntgenPhotoelektronenspektroskopie geben Aufschluss über Veränderungen oder Verunreinigungen des Cs2 Te [Led07b].
2.1 Erzeugung und Beschleunigung des Elektronenstrahls
5
Hohlraumresonator
Bei der am PITZ verwendeten Elektronenquelle handelt es sich um eine Kupfer-Kavität
mit einer Halbzelle und einer Vollzelle. Die Resonanzfrequenz liegt bei ν =1,3 GHz und
liegt damit im L-Band. Daraus ergibt sich eine Wellenlänge von λ = c/ν ≈ 23 cm und
damit eine Resonatorlänge von L ≈ λ2 · 1,5 ≈ 17 cm. Das Feld wird koaxial eingekoppelt,
Hauptmode ist die TM010 -Mode, d.h. das elektrische Feld zeigt entlang der Strahlachse
(in ±z-Richtung). Der Resonator wird im π-Mode betrieben, d.h. die Richtungen des elektrischen Feldes in Halbzelle und Vollzelle sind stets entgegengesetzt. Zum stabilen Betrieb
ist eine genaue Regelung der Temperatur erforderlich. Durch eine Wasserkühlung wird
eine Temperaturstabilität von ±0,05 K erreicht, resultierend in einer Frequenzstabilität
von ±1,05 kHz [Lip04].
Die Phase ϕ des elektrischen Feldes beim Eintreffen eines Laserpulses ist ein wichtiger
Optimierungsparameter. Das elektrische Feld entlang der Symmetrieachse z kann näherungsweise beschrieben werden durch (stehende Welle):
E(t,z) = E0,max · sin(ωt + ϕ) · cos ω
wobei E0,max ≈ 60 MV/m,
z
,
c
(2.1)
ω = 2πν.
Die maximale Feldstärke an der Kathode (z = 0) zum Emissionszeitpunkt t = 0 wird
für ϕ = 90° erreicht. Für relativistische Teilchen wäre dies die Phase mit maximalem
Energiegewinn. Die Elektronen werden jedoch mit geringer kinetischer Energie emittiert,
daher wird der maximale Energiegewinn bei ϕ < 90° erreicht. Neben der Phase des HFFeldes der Elektronenquelle ist auch die relative Phasenlage des HF-Feldes der zweiten
Beschleunigungskavität ein wichtiger Optimierungsparameter.
Abbildung 2.3: Typisches zeitliches Profil eines Laserpulses (August 2007). Das bestangepasste Trapez hat eine Anstiegszeit von 6,7 ps, eine Fallzeit von
6,5 ps und eine Halbwertsbreite von 21,1 ps.
6
2 Der Photoinjektor PITZ
2.2 Diagnose der Strahleigenschaften
Die Mehrzahl der Komponenten am PITZ dient der Diagnose der Strahleigenschaften.
Einige Methoden zerstören den Strahl, andere arbeiten zerstörungsfrei. So kann z.B. die
Ladung der Elektronenpakete einerseits durch Faraday-Becher bestimmt werden, andererseits sind zerstörungsfreie Messungen durch Induktionsspulen mit anschließender Integratorschaltung (Integrating Current Transformers, ICTs) möglich. ICTs können erst ab einer
Mindeststromstärke eingesetzt werden, sind dann jedoch genauer als Faraday-Becher.
2.2.1 Transversale Eigenschaften
Strahlprofil
Das transversale Profil kann durch Einbringen von Schirmen in den Strahl untersucht werden. Schirme beschichtet mit Yttrium-Aluminium-Granat (YAG) erzeugen FluoreszenzLicht, und mit dünnen Aluminium-Folien überzogene Schirme erzeugen optische Übergangsstrahlung (OTR). Die durch den Strahl erzeugte Lichtverteilung wird mit einer
Kamera aufgezeichnet . Eine nahezu zerstörungsfreie Messung des Strahlprofils ist durch
Wirescanner möglich. Eine Messung der mittleren Strahlposition kann zerstörungsfrei
durch Strahllagemonitore erfolgen, die das elektrische Feld an 2 oder 4 Stellen am Rand
des Strahlrohrs erfassen.
Transversaler Phasenraum, Emittanz
Zur Messung des transversalen Phasenraums der Elektronenpakete (aufgespannt von den
Verteilungen x, px und y, py ) gibt es mehrere Methoden. Am PITZ wird derzeit hauptsächlich der sogenannte Slit-Scan verwendet, bei dem durch einen fahrbaren Spalt ein
Teil des Strahls ausgeschnitten wird, dessen Durchmesser an zwei verschiedenen Positionen gemessen wird, um die lokale Divergenz zu bestimmen. Durch eine Wiederholung
der Messung für verschiedene Spaltpositionen kann der transversale Phasenraum rekonstruiert werden [Mil03]. Aus den Verteilungen des Phasenraums kann die transversale
Emittanz bestimmt werden:
εn,x = βγ ·
q
hx2 i hx02 i − hxx0 i2
(2.2)
x ist die räumliche Verteilung der Elektronen in einer der beiden transversalen Richtungen, die Verteilung x0 = ppxz beschreibt die Divergenz. Der Index x zeigt, dass hier nur die
transversale Emittanz in einer Richtung gemeint ist. Der Index n bedeutet, dass es sich um
die mit den Lorentzfaktoren β,γ normierte Emittanz handelt. Diese Normierung erleichtert den Vergleich von Elektronenpaketen unterschiedlicher Strahlenergie, es handelt sich
0
um die relativistischen Faktoren aus pz ≈ p = βγ m
c , die im Nenner von x auftreten. Zur
Beschreibung der transversale Emittanz in x- und y-Richtung verwendet man das geome√
trische Mittel: εn,xy = εn,x · εn,y . Die transversale Emittanz ist zusammen mit dem Spitzenstrom einer der wichtigsten Strahlparameter in Hinblick auf den SASE-FEL-Betrieb.
2.2 Diagnose der Strahleigenschaften
7
Beide haben großen Einfluss auf die erreichbare Ausgangsleistung, die minimale Undulatorlänge, und die minimal erreichbare SASE-Wellenlänge [Flö99]. Mit der zuletzt bei PITZ
untersuchten Beschleunigerkavität wurde ein Wert von εn,xy = (1,26 ± 0,18)mm·mrad erreicht [Sta07]. Elektronen, die weit von der Strahlmitte entfernt sind oder deutlich vom
mittleren transversalen Impuls abweichen, tragen nicht zum SASE-Prozess bei. Um diesen äußeren Teil des Phasenraums in der Auswertung nicht zu berücksichtigen, kann man
einen Schnitt bei 10% der maximalen Ladungsdichte anbringen. Man erhält dann eine
Emittanz von εn,xy ≈ 0,9mm·mrad [Ste07], [Ste08]. Dies genügt den Anforderungen des
Europäischen Röntgenlasers.
2.2.2 Longitudinale Eigenschaften
Impuls
Ein Dipolspektrometer dient zur Messung der Impulsverteilung: Unter Vernachlässigung
der Randfelder beschreibt die Elektronenbahn im Dipolmagneten mit Flussdichte B einen
Kreisbogen, dessen Radius ρ gegeben ist durch
ρ∝
p·c
.
e·B
(2.3)
Abhängig vom Impuls p werden die Elektronen unterschiedlich stark abgelenkt. Auf einem
nachfolgenden Schirm wird die Impulsverteilung daher als räumliche Verteilung sichtbar.
Zeitliche Struktur
Die Länge der Elektronenpakete liegt im ps-Bereich, eine Untersuchung mit Schirm und
Kamera ist daher nicht möglich. Das Messprinzip wird in einem eigenen Kapitel behandelt (Kap. 3). Aus der zeitlichen Struktur lässt sich unter Kenntnis der Gesamtladung die
erreichte Stromstärke bestimmen. Wie oben erwähnt ist diese zusammen mit der transversalen Emittanz von großer Bedeutung für den FEL-Betrieb.
Longitudinaler Phasenraum
Verbindet man die Untersuchung der zeitlichen Struktur mit einer Impulsmessung, so erhält man den longitudinalen Phasenraum, aufgespannt von z und pz (oder auch t und
p ≈ pz ). Ein Beispiel ist in Abbildung 2.4 zu sehen [Rön06]. Zum Betrieb eines SASE-FELs
ist eine kleine Energiebreite des Elektronenstrahls wichtig [Flö99]. Am günstigsten für die
Kompression der Elektronenpakete ist eine lineare Gestalt des Phasenraums, also ein linearer Zusammenhang zwischen z und pz so, dass der Schwanz des Elektronenpakets eine
höhere Energie hat als der Kopf. Diese Gestalt muss jedoch nicht an der Quelle erreicht
werden, sondern kann z.B. durch geeignete Wahl der Hochfrequenz-Phase in der nachfolgenden Beschleunigungskavität erzeugt werden („Off-Crest-Beschleunigung“). Hieraus
ergibt sich die Notwendigkeit einer Messung des longitudinalen Phasenraums.
8
2 Der Photoinjektor PITZ
Abbildung 2.4
Ein Beispiel eines bei PITZ gemessenen longitudinalen Phasenraums (links) mit zugehöriger Simulation (rechts, beide aus [Rön06]). Die Impulsauflösung wurde durch eine Neugestaltung des
Dipolspektrometers inzwischen verbessert. Eine Verbesserung der zeitlichen Auflösung ist erstrebenswert. Für die gezeigte Verteilung hat der Kopf des Pakets (oben links) eine höhere Energie
als der Schwanz (unten rechts), das Elektronenpaket wird daher auseinanderlaufen.
2.3 Simulationen
Parallel zu den Bemühungen, die Strahlqualität und die Genauigkeit der Diagnose zu
verbessern, werden bei PITZ in großem Umfang Simulationen zur Strahldynamik durchgeführt. Häufig sollen damit konkrete Fragestellungen, die beim Entwurf neuer Diagnosekomponenten auftreten, untersucht werden. Darüber hinaus kann durch den Vergleich
zwischen Experiment und Simulation das Verständnis der zugrundeliegenden Theorie
überprüft werden. Hauptsächlich verwendet wird dabei das bei DESY entwickelte Softwarepaket Astra (A Spacecharge Tracking Algorithm) [Flö00]. Es simuliert den Emissionsprozess, die Beschleunigung und den Strahltransport, dabei werden Raumladungskräfte
und weitere Effekte berücksichtigt (z.B. Schottky-Effekt). Es ist für zahlreiche Computersysteme verfügbar. In Abschnitt 4.2 wird seine Verwendung an einem Beispiel vorgeführt.
3 Longitudinale Diagnostik
Die longitudinalen Eigenschaften des Elektronenpaketes sind seine z- und pz -Verteilungen,
also seine longitudinale Struktur und seine Impulsverteilung, sowie der von diesen aufgespannte longitudinale Phasenraum. Die Messung der Impulsverteilung mit einem Dipolspektrometer wurde bereits im vorherigen Kapitel beschrieben (Abschnitt 2.2.2), die
Methodik zur Messung einer longitudinalen Verteilung wird im Folgenden erläutert. Diese wird zur Messung der Elektronenpaket-Länge verwendet, eine Kombination mit der
Methode zur Messung der Impulsverteilung ermöglicht dann eine Rekonstruktion des longitudinalen Phasenraums. Die longitudinale Struktur kann als räumliche oder zeitliche
Struktur verstanden werden: Räumlich erscheint sie einem Beobachter seitlich des Strahlverlaufs zu einem festen Zeitpunkt t, zeitlich erscheint sie auf einem Schirm, welcher in
den Strahlverlauf eingebracht wird (d.h. bei fester Position z). Für geeignetes Schirmmaterial erzeugt der Elektronenstrahl durch verschiedene Prozesse eine Photonenverteilung,
die der longitudinalen und auch transversalen Struktur des Elektronenpakets entspricht
(Abschnitt 3.1). Dieses optische Signal soll unter Beibehaltung seiner Struktur zu einer
Streak-Kamera transportiert werden (Abschnitt 3.2), mit der die zeitliche Verteilung und
eine Richtung der räumlichen Verteilung gemessen werden kann (Abschnitt 3.3).
3.1 Entstehung optischer Signale
3.1.1 Cherenkov-Effekt
Cherenkov-Licht entsteht, wenn ein geladenes Teilchen die Lichtgeschwindigkeit in einem
Dielektrikum mit Brechungsindex n überschreitet (β > ccm0 = n1 ). Das Licht wird in einem
Hohlkegel um die Teilchenrichtung emittiert, dessen halber Öffnungswinkel ϑ durch die
Teilchenenergie bestimmt ist:
cos ϑ =
1
n·β
(3.1)
Der außerhalb des Dielektrikums beobachtete Winkel ϑ0 weicht davon aufgrund der Brechung an der Oberfläche
Falls die Grenzfläche
senkrecht zur Teilchenrichtung steht,
ab.
p
ergibt sich ϑ0 = arcsin n · 1 − 1/(n · β)2 . Abhängig vom Brechungsindex kann es sinnvoll sein, dass Medium schräg einzubringen, um Totalreflexion zu vermeiden. Der Kegel
ist für gewöhnliche Medien vorwärts gerichtet. Da von jedem Punkt der Teilchenbahn ein
solcher Kegel ausgeht, hat der resultierende Lichtkegel eine Breite von b = d · tan ϑ, wobei
d die Dicke des Cherenkov-Radiators bedeutet (Abbildung 3.1). Auch für ein punktför-
9
10
3 Longitudinale Diagnostik
miges Teilchen hat die Leuchterscheinung daher bereits eine gewisse Ausdehnung, da das
Licht parallel emittiert wird, kann es aber prinzipiell wieder in einem Punkt vereinigt
werden. Für den Elektronenstrahl entsteht die Gesamtverteilung jedoch aus der Überlagerung der Einzelkegel – diese können nun nicht mehr getrennt werden, daher ist die
erreichbare Auflösung des Strahlprofils mit einem Cherenkov-Radiator unabhängig vom
optischen System durch die Kegelbreite b begrenzt.
Abbildung 3.1
Skizze eines Cherenkov-Lichtkegels für
n = 1,2 und β ≈ 1. Eingezeichnet sind die
Öffnungswinkel ϑ und ϑ0 innerhalb bzw.
außerhalb des Mediums, sowie die Spurlänge d und die Kegelbreite b.
Abbildung 3.2
Energieabhängigkeit der Emissionswinkel
für verschiedene Cherenkov-Radiatoren und
einen Radiator für optische Übergangsstrahlung (OTR). Für OTR ist nur der Winkel
maximaler Intensität θmaxE angegeben, die
Gesamtverteilung ist deutlich breiter.
Cherenkov-Licht hat ein kontinuierliches Spektrum, im sichtbaren Bereich ist die Intensität etwa proportional zur Frequenz. Zur Erzeugung von Cherenkov-Licht werden am
PITZ Radiatoren aus Siliziumoxid (SiO2 ) mit sehr geringer Dichte verwendet (Aerogel).
Es kommen Aerogel-Radiatoren mit n = 1,008, n = 1,03 und n = 1,05 zum Einsatz, die
sich vorwiegend in dem Öffnungswinkel des emittierten Lichtkegels unterscheiden, aber
auch in der Lichtausbeute, die mit steigendem Brechungsindex zunimmt. Um von jedem
Radiator etwa gleich viel Licht zu erhalten, wird die Dicke der Radiatoren entsprechend
gewählt. Wie oben erläutert, wächst mit der Dicke des Radiators auch die Breite b des
emittierten Lichtkegels an, und die erreichbare optische Auflösung wird erheblich verschlechtert. Für Messungen des longitudinalen Phasenraums kommt daher nur Aerogel
mit n = 1,05 und d = 5 mm in Frage, oder das im folgenden Abschnitt beschriebene
OTR-Licht. Eine vollständige Liste der verwendeten Radiatoren, ihrer Lichtausbeute und
ihrer Einsatzgebiete ist in [Bäh07] zu finden.
3.1 Entstehung optischer Signale
11
Die aus Formel (3.1) bestimmten Öffnungswinkel für die verwendeten Radiatoren sind in
Abbildung 3.2 dargestellt. Für n = 1,05 können Winkel von über 18° auftreten. Es ist
schwierig, solche Lichtkegel von einem ausgedehnten Gegenstand vollständig mit einem optischen System aufzunehmen. Am PITZ werden daher zwei verschiedene Ansätze verfolgt:
Für eine geringe Größe (einige mm) der abzubildenden Verteilung werden die CherenkovKegel vollständig durch ein optisches Element aufgefangen („Vollkonus“-Verfahren). Um
von einer ausgedehnten Verteilung (bis etwa 8 cm) gleichmäßig viel Licht einzusammeln,
wird das „Teilkonus“-Verfahren eingesetzt. Ein Planspiegel seitlich des Radiators schneidet
aus den verschiedenen Lichtkegeln ein jeweils gleich großes Segment aus (Abbildung 3.3).
Nur das reflektierte und weitgehend parallele Licht wird zur Abbildung verwendet. Man
erreicht eine gleichmäßige Ausleuchtung über einen großen Bereich, verliert jedoch den
Hauptteil des erzeugten Cherenkov-Lichtes.
Abbildung 3.3: Schematische Darstellung des Teilkonus-Verfahrens. Durch einen Spiegel
seitlich des Radiators werden etwa gleichgroße Segmente der Lichtkegel
über einen großen Bereich der Verteilung ausgeschnitten.
3.1.2 Optische Übergangsstrahlung
Optische Übergangsstrahlung (OTR, für Engl. optical transition radiation) tritt auf, wenn
ein geladenes Teilchen eine Änderung des es umgebenden Brechungsindexes erfährt, z.B.
beim Übertritt von einem Medium in ein anderes, oder in einem Medium mit inhomogenem Brechungsindex. Der Darstellung von [Gin82] folgend, sollen einige Eigenschaften
von OTR beschrieben werden. Dazu wird angenommen, dass das Teilchen abrupt und
vollständig abgebremst wird. Die Winkelverteilung der abgestrahlten Energiedichte Wβ
für Elektronen, deren Geschwindigkeit durch β = vc beschrieben wird, ist in der Näherung
gegeben durch
Wβ (θ,φ) =
e2
β 2 sin2 θ
.
4π 2 c (1 − β cos θ)2
(3.2)
Die Näherung macht keine Aussage über das emittierte Wellenlängenspektrum. Die Verteilung ist rotationssymmetrisch bzgl. der Bewegungsrichtung des Teilchens, daher gibt
12
3 Longitudinale Diagnostik
es keine Abhängigkeit vom Azimutalwinkel φ. In Abbildung 3.4 ist die Winkelverteilung
des emittierten Lichts für drei verschiedene Teilchenenergien dargestellt. Für die gezeigten
Werte von β ist der Kegel stark vorwärts gerichtet.
Abbildung 3.4: Gestalt der emittierten optischen Übergangsstrahlung beim abrupten Abstoppen eines Elektrons in Materie für verschiedene Werte von β, entsprechend Impulsen von 1,6 MeV/c, 2,5 MeV/c und 3,6 MeV/c. Für den
letzten Fall ist zusätzlich der Winkel θmaxE ≈ 8,1° dargestellt.
Durch Integration von (3.2) über dΩ = sin θ dθ dφ erhält man die insgesamt abgestrahlte
Energie (Abbildung 3.5)
Wβgesamt
1+β
e2 1
ln
=
πc β
1−β
−2 .
(3.3)
Es gibt keine theoretische Energieschwelle für die Erzeugung von OTR, im Experiment
wird jedoch erst ab einer Elektronenenergie von einigen MeV ausreichend viel Licht für
eine Phasenraummessung erzeugt. Der Emissionswinkel maximaler Energie θmaxE kann
ebenfalls aus der diffentiellen Energiedichte (3.2) bestimmt werden:
dWβ (θ) !
= 0 ⇒ θmaxE = arccos β = arccos 1/ 1 + (me c/p)2 .
dθ
θ=θmaxE
q
(3.4)
Dieser Zusammenhang ist in Abbildung 3.2 zusammen mit der Winkelabhängigkeit für
Cherenkov-Licht dargestellt. In Abbildung 3.4 ist θmaxE für das Beispiel mit β = 0,99
eingezeichnet.
Die hier verwendete Näherung beschreibt die Situation am PITZ insofern unzutreffend,
als dass dort zur Erzeugung von OTR eine dünne Aluminiumschicht auf einem 0,3 mm
dicken Siliziumträger verwendet wird, in der die Elektronen nur einen Teil ihrer Energie
verlieren und sowohl beim Eintritt als auch beim Austritt einen Lichtkegel erzeugen. Um
das Licht außerhalb des Strahlrohrs verwenden zu können, wird der Schirm um 45° gegen
die Strahlrichtung gedreht.
3.2 Das optische Transportsystem
13
Abbildung 3.5: Gesamtenergie der optischen Übergangsstrahlung, in der Näherung für
abruptes Abstoppen [Gin82].
3.2 Das optische Transportsystem
Radiatoren zur Erzeugung von Cherenkov-Licht oder OTR können an verschiedenen Positionen entlang des Strahls eingebracht werden (siehe auch Abbildung 2.1). Die erste und
die letzte Position, an der eine Auslese mit der Streak-Kamera (siehe unten) vorgesehen
ist, sind 20 m voneinander entfernt. Da nur eine einzige Streak-Kamera zur Verfügung
steht, muss das Licht über eine Distanz von wenigstens 10 m transportiert werden (StreakKamera mittig zwischen erster und letzter Auslesemöglichkeit). Um Strahlenschäden an
der Streak-Kamera zu vermeiden und eine direkte Bedienung auch bei Betrieb der Anlage
zu ermöglichen, wurde sie jedoch in einem separaten Raum untergebracht. Das optische
System muss daher eine Entfernung von etwa 30 m überbrücken. Es soll dabei nicht einfach
nur Licht transportieren, sondern die Verteilung des optischen Signals sowohl transversal
als auch longitudinal erhalten. Das derzeitige optische Transportsystem wird in Kapitel 4
eingehend beschrieben, in den Folgekapiteln werden mögliche Verbesserungen untersucht.
3.3 Streak-Kamera
Bei PITZ ist eine Streak-Kamera C5680 von Hamamatsu mit einer Zeitauflösung von
2 ps im Einsatz [Ham04]. Sie dient dazu, die zeitliche Struktur eines Lichtpulses zu untersuchen, indem diese in eine räumliche Verteilung umgewandelt wird. Anhand von Abbildung 3.6 soll kurz ihre Funktionsweise erklärt werden. Das zu untersuchende optische
Signal wird auf den Eingangsspalt der Streak-Kamera abgebildet. Innerhalb der Kamera
wird es durch eine interne Optik auf eine Photokathode abgebildet. Verschiedene Eingangsoptiken stehen zur Verfügung, bei PITZ wird zumeist eine reflektive Eingangsoptik
verwendet. Durch den Photoeffekt wird das optische Signal an der Photokathode wieder
in eine Elektronenverteilung umgewandelt, welche durch die nachfolgende Elektrode be-
14
3 Longitudinale Diagnostik
schleunigt wird. Die Elektronen passieren ein Elektrodenpaar, auf das bei eintreffendem
Trigger eine zeitlich rasch ansteigende Spannung gegeben wird. Je nach relativer zeitlicher
Lage erfahren die Elektronen eine unterschiedlich starke vertikale Ablenkung. Durch eine
Multikanal-Platte (MCP, von Engl. multi-channel plate) wird die Elektronenzahl vervielfacht. Die Elektronen treffen auf einen Floureszenzschirm. Das dort erzeugte Licht wird
mit einer CCD-Kamera aufgezeichnet. Eine der Bildachsen hat eine zeitliche Bedeutung,
die andere eine räumliche. Der Eingangsspalt der Streak-Kamera ist 5,4 mm breit, die
Höhe kann von 0–5mm auf 5 µm genau eingestellt werden. Bei PITZ wird typischerweise
eine Höhe von 10–100 µm verwendet. Bei der Justierung oder zur Messung bei geringer
Lichtintensität wird der Eingangsspalt der Streak-Kamera weiter geöffnet, was jedoch zu
einer Verschlechterung der Zeitauflösung führt, da sich nun in vertikaler Richtung eine zeitliche und eine räumliche Verteilung überlagern. Aufnahmen können aufsummiert
werden, wobei jedoch der Jitter des Elektronenstrahls berücksichtigt werden muss. Die
durch MCP, Schirm und Kamera festgelegte räumliche Auflösung wird vom Hersteller mit
25 lp/mm (Linienpaare pro mm) angegeben [Ham04].
Abbildung 3.6: Aufbau und Funktionsweise einer Streak-Kamera zur Messung der Zeitstruktur eines optischen Signals (aus [Ham04], Beschriftung angepasst).
3.4 Alternative: RF-Deflektor
Die Untersuchung mittels Streak-Kamera erfordert zwei Konversionsprozesse: die Elektronenverteilung des Strahls wird durch den Radiator in ein optisches Signal umgewandelt,
welches an der Kathode der Streak-Kamera wieder in eine Elektronenverteilung überführt wird, um die Ablenkung durch das transversale elektrische Feld zu ermöglichen.
Alternativ kann das Ablenkfeld auch ins Strahlrohr integriert werden. Eine solche Anordnung nennt man Hochfrequenz- oder RF-Deflektor (von Engl. radio frequency). Sie
ersetzt Radiator, optisches System und Streak-Kamera und vermeidet so Konversionsund Auflösungsverluste. Falls sich die Frequenzen von RF-Deflektor und den übrigen
Kavitäten unterscheiden, muss er durch ein eigenes Klystron versorgt werden. Die Untersuchung der zeitlichen Struktur mit dem RF-Deflektor ist auf eine feste Position im
Strahlrohr beschränkt, während Messungen mit der Streak-Kamera durch geeignete optische Transportsysteme an verschiedene Schirmstationen möglich sind.
4 Das derzeitige optische Übertragungssystem
Zurzeit ermöglicht ein optisches System aus achromatischen Linsen und Foto-Objektiven
die Übertragung optischer Signale von mehreren Schirmstationen zur Streak-Kamera über
eine Distanz von rund 30 m. Das optische System hat für jede Schirmstation eine oder zwei
Eingangsoptiken. Alle Eingangsoptiken münden in einen gemeinsam genutzten Abschnitt
des Systems. Der Abbildungsmaßstab der Eingangsoptiken muss an die zu untersuchende
Signalverteilung und an die Apertur des Hauptsystems angepasst sein. Das Hauptsystem
dient dem Transport bei Abbildungsmaßstab 1 mit anschließender Anpassung an den
Eingangsspalt und das interne optische System der Streak-Kamera. Das derzeitige System
ist schematisch in Abbildung 4.1 zu sehen. Bei seinem Entwurf wurden zusätzlich zu den
genannten Anforderungen folgende Prinzipien verfolgt [Bäh03]:
• Hohe Lichtstärke durch möglichst vollständiges Auffangen des Lichts
• Gleichmäßige Lichtstärke durch geringe Vignettierung (Begrenzungen des Strahlenverlaufs, die nicht alle Gegenstandspunkte gleichermaßen betreffen)
• Möglichst geringe Anzahl optischer Elemente, hohe Transmission
• Optimierung des optischen Auflösungsvermögens
• Diese Optimierung erfolgt bzgl. eines festgelegten Wellenlängenbereichs und einer
bestimmten Ausdehnung der abzubildenden Verteilung
Die Zeitauflösung ist dabei nicht ausdrücklich aufgelistet, hängt aber eng mit der räumlichen Auflösung zusammen (siehe Abschnitt 5.3). Die Eingangsoptiken sind teils in zwei
Varianten vorhanden, die entweder den ganzen Lichtkegel einer kleinen Verteilung auffangen (etwa 1 mm, „Vollkonus“) oder Kegelsegmente einer ausgedehnten Verteilung (mehrere cm, „Teilkonus“). Im Hauptsystem werden Teleskope aus paarweise gleichen achromatischen Linsen eingesetzt. Der Abstand zwischen zwei Linsen entspricht dabei gerade
der doppelten Brennweite, dadurch entstehen Zwischenbilder im Abstand der vierfachen
Brennweite (das sogenannte 4f-Schema, Abbildung 4.2).
In Abschnitt 4.1 wird eine Messung der Elektronenpaket-Länge beschrieben. Es folgen Simulationen zur Elektronenstrahldynamik (Abschnitt 4.2) und zum derzeitigen optischen
Übertragungssystem (Abschnitt 4.3), dabei werden auch Experiment und Simulation verglichen.
15
16
4 Das derzeitige optische Übertragungssystem
Abbildung 4.1: Schema des optischen Übertragungssystems bei PITZ (Sommer 2007).
Abbildung 4.2: Zwei Linsen im 4f-Schema. Der Abstand von doppelter Brennweite zwischen den Linsen ist zur Abbildung ausgedehnter Gegenstände erforderlich, da sonst verstärkt Lichtverluste durch Vignettierung auftreten oder
der Durchmesser der zweiten Linse vergrößert werden muss.
4.1 Experiment: Messung der Elektronenpaket-Länge
Es sollen Ergebnisse einer Messung mit der Schirmstation HIGH1.Scr2 und dem nachfolgenden Dipolspektrometer DISP2 vorgestellt werden. An der Schirmstation HIGH1.Scr2
kann die zeitliche Verteilung der Ladungsdichte hinter der Beschleunigungskavität bestimmt werden (siehe Abbildung 2.1). Hierbei wird ein Aerogel-Radiator verwendet, um
auch bei geringen Strahlenergien ausreichend viel Licht zu erzeugen. Das Dipolspektrometer, welches zur Bestimmung der Impulsverteilung dient, verfügte im Sommer 2007 noch
nicht über die Möglichkeit zur Auslese mit der Streak-Kamera. Es wurden daher lediglich
die beiden Projektionen des longitudinalen Phasenraums auf z und pz aufgezeichnet. Für
Impulsmessungen werden OTR-Radiatoren verwendet, da die mit Cherenkov-Radiatoren
erzielte räumliche Auflösung nicht ausreicht.
4.1 Experiment: Messung der Elektronenpaket-Länge
17
4.1.1 Einfluss der Dispersion auf die gemessene Elektronenpaket-Länge
Eine „naive“ Messung der zeitlichen Struktur unter Verwendung des optischen Systems
und der Streak-Kamera führt nicht zum korrekten Ergebnis, da die Brechungsindizes n
der Gläser im optischen System sich mit der Wellenlänge ändern, also n = n(λ), mit
dn < 1. Dies verursacht neben (transversalen) chromatischen Aberrationen auch eine
dλ
Wellenlängenabhängigkeit der (longitudinalen) Lichtlaufzeiten: Mit zunehmender Wellenlänge nimmt auch die Lichtgeschwindigkeit im Medium cm = cn0 zu, die Lichtlaufzeit
nimmt also ab. Die Korrektur der chromatischen Aberrationen durch die achromatischen
Linsen verstärkt diesen Effekt aufgrund der höheren Linsendicke noch.
Durch Einsetzen von Farbfiltern wird der verwendete Wellenlängenbereich eingeschränkt
und die Auswirkungen der Dispersion stark reduziert. Dieser Effekt ist deutlich zu erkennen in Abbildung 4.3, wo gemessene Verteilungen mit und ohne Farbfilter gegenübergestellt sind.
Abbildung 4.3
Verbesserung der zeitlichen Auflösung durch
Farbfilter, die Kurven wurden passend zu den
Filterwellenlängen von 700 nm bis 450 nm
eingefärbt. Die Verteilung ohne Farbfilter ist
in schwarz dargestellt und auf 40% ihrer ursprünglichen Höhe verkleinert.
Abbildung 4.4
Relative Ankunftszeit der verschiedenen
Wellenlängen-Anteile mit Fitkurve, aufgetragen
sind die Schwerpunkte der Einzelverteilungen mit Unsicherheiten (Mittelwertfehler bei
Mehrfachmessung). Der Farbfilter hat eine
Halbwertsbreite von 10 nm, dies entspricht einer
Ungenauigkeit in der Zeitmessung von 3,2 ps.
Verwendet wurden Bandpassfilter mit zentralen Wellenlängen von 450 nm–700 nm in
Schritten von 50 nm. Die Transmission bei der zentralen Wellenlänge beträgt etwa 60%,
die Halbwertsbreite der Transmissionskurve ist 10 nm. Aus den Verhältnissen der Flächen
unter den gemessenen Kurven (in Abbildung 4.3) bestimmt man die hinter dem Filter
verbleibende Intensität zu bestenfalls 4% (bei 500 nm und 550 nm). Die Wellenlänge
maximaler Intensität wird festgelegt durch die ursprüngliche Verteilung des CherenkovLichts, welche für kürzere Wellenlängen intensiver ist, und die Transmission des optischen
Systems, die unterhalb von 550 nm nachlässt (siehe Abbildung 4.12). Die Lage des Maximums kann sich mit der Elektronenenergie geringfügig ändern.
In Abbildung 4.3 sieht man auch, dass die Farbfilter einen Einfluss auf die Ankunftszeit
18
4 Das derzeitige optische Übertragungssystem
haben, da die Verteilungen mit Farbfiltern im Vergleich zur Gesamtkurve zu weit rechts
liegen. Ob diese Verzögerung für alle Farbfilter gleich groß ist, wurde experimentell nicht
überprüft, da für die verschiedenen Wellenlängen jeweils nur ein Filter zur Verfügung
stand. Andernfalls hätte man die jeweils entstehende Verzögerung durch das Einbringen
eines zweiten, gleichartigen Farbfilters bestimmen können. Durch eine Addition der Einzelverteilungen schätzt man ab, dass die mittlere Verzögerung etwa 10±5 ps beträgt. Die
Gestalt dieser Kurve ist qualitativ mit der Verteilung, welche ohne Filter aufgenommen
wurde, verträglich. Die Verzögerungen der einzelnen Filter werden sich daher nur um
einen deutlich kleineren Betrag als 10 ps unterscheiden.
Um den noch verbleibenden Einfluss der Dispersion bei Verwendung eines Filters abzuschätzen, wird die Lage der Schwerpunkte der Verteilungen gegenüber der Filterwellenlänge aufgetragen (Abbildung 4.4). Aus der Steigung der Kurve und der Breite der
Transmissionskurve der Filter findet man ∆t545nm−555nm ≈ 3,2 ps, eine deutliche Verbesserung gegenüber ∆t450nm−700nm ≈ 75 ps. Die dort gezeigte Kurvenform ändert sich nur
geringfügig für verschiedene Energien oder Messungen an verschiedenen Schirmstationen.
In Abbildung 4.5 sind das transversale und das longitudinale Profil der Laserverteilung
gezeigt, welche an diesem Messtag (Juni 2007) zur Erzeugung des Elektronenstrahls verwendet wurde. Die zeitliche Struktur der Elektronenpakete, gemessen an HIGH1.Scr2,
ist in Abbildung 4.6 zu sehen, zusammen mit der am nachfolgenden Dipolspektrometer
bestimmten Impulsverteilung. Die Phasenlage von Elektronenquelle und Beschleunigungskavität wurde so eingestellt, dass der gemessene mittlere Impuls maximal wurde.
Abbildung 4.5
Das bei der Messung eingestellte räumliche und zeitliche Laserprofil. Aus dem linken Bild, bei dem
der Laser auf eine CCD-Kamera gebracht wurde, wurde die RMS-Größe zu 0,55 mm bestimmt.
Der zentrale Teil ist aufgehellt dargestellt, tatsächlich war das Signal dort weniger stark als das
Rauschen am linken Bildrand. Die zeitliche Verteilung ist im rechten Bild zu sehen, sie wurde mit
der Streak-Kamera aufgezeichnet.
4.2 Simulation der Messung: Photoinjektor
19
Abbildung 4.6: Messung von Elektronenpaket-Länge und Impulsverteilung an
HIGH1.Scr2 (Juni 2007). Die HF-Phasen von Elektronenquelle und Beschleunigungskavität wurden so eingestellt, dass der erreichte Impuls maximal wurde. Die Bunchladung war Q = 0,85 nC, das verwendete Laserprofil ist in Abbildung 4.5 gezeigt.
4.2 Simulation der Messung: Photoinjektor
Die Simulation mit Astra erfordert verschiedene Eingangsparameter: Zum einen Information über den Beschleuniger (Feldverteilungen, Aperturen), zum anderen die dreidimensionale Verteilung des Laserpulses. Hinzu kommen einige programmspezifische Parameter, mit denen z.B. die Simulation der Raumladungskräfte gesteuert wird.
Die Dateien, welche den Beschleuniger beschreiben, sind für PITZ bereits verfügbar, jedoch muss die Stärke der Feldverteilungen skaliert werden. Für das magnetische Feld des
fokussierenden Solenoiden gibt es einen linearen Zusammenhang zwischen Stromstärke
und Feldamplitude. Die Amplitude des elektrischen Feldes der Kavität kann nicht genau
gemessen werden, da es keine Feldsonde in der Kavität gibt, sondern nur die in die Kavität
eingekoppelte Leistung gemessen wird. Man bestimmt die Feldamplitude durch iterative
20
4 Das derzeitige optische Übertragungssystem
Simulationen der Elektronenquelle so, dass der mittlere Impuls korrekt vorhergesagt wird,
erst dann simuliert man das ganze System. Die verwendete longitudinale Laserverteilung
wird durch zwei angepasste Gaußkurven gut beschrieben, aus der transversale Verteilung
bestimmt man den Durchmesser zu etwa 2 mm (siehe Abbildung 4.5). Aus diesen Angaben wird eine entsprechende Verteilung generiert, in der die 6 × 109 Elektronen (1 nC)
durch typischerweise 10.000 − 200.000 Makropartikel repräsentiert werden.
Es wurden passende Simulationen zu den in Abbildung 4.6 gezeigten Messungen durchgeführt, die Ergebnisse sind in Abbildung 4.7 dargestellt. Aus den simulierten Partikelkoordinaten und Geschwindigkeiten bei HIGH1.Scr2 lässt sich die Gestalt des longitudinalen
Phasenraums bestimmen. Aus diesem lassen sich die zeitliche Verteilung und die Impulsverteilung durch Projektion gewinnen. Die Form der simulierten zeitlichen Struktur
stimmt mit der gemessenen Form überein, hat aber eine größere Halbwertsbreite (18 ps
statt (15,7±0,3) ps). Die RMS-Breite der Verteilung stimmt in Messung und Simulation
überein. Die simulierte Impulsverteilung besitzt einen scharfen Peak bei 15,96 MeV/c und
links davon einen „Buckel“. Ein solcher ist in der Messung nicht zu erkennen, könnte aber
vom Dipolspektrometer vermutlich auch nicht mehr aufgelöst werden: Da Elektronen mit
unterschiedlichen transversalen Koordinaten eine leicht unterschiedliche Bahn im Dipolmagneten durchlaufen, führt die transversale Ausdehnung des Strahls zu einer Verschmierung der gemessenen Verteilung. Der Untergrund kommt vor allem durch das Rauschen
der CCD-Kamera zustande: Die Impulsverteilung wird durch Projektion auf eine der beiden Koordinaten des Schirms im Dipolspektrometer erhalten. Der Hintergrund-Abzug findet jedoch für die zweidimensionale Verteilung statt. Durch das Rauschen können hierbei
prinzipiell negative Werte auftreten, diese werden jedoch auf 0 gesetzt. Bei der Projektion
tritt daher eine leichte Verfälschung zu positiven Werten auf. Wegen dieses Untergrunds
ist nicht zu erkennen, ob der Schweif zu niedrigeren Impulsen, welchen man aus der Simulation erwartet, auch in der Messung vorhanden ist. Im Wesentlichen findet man eine
gute Übereinstimmung zwischen Messung und Simulation. Für den Phasenraum als Ganzes muss dies aber nicht zutreffen (siehe Beispiel in Abbildung 2.4), da sich Abweichungen
bei der Projektion auf Zeit- oder Impulsrichtung teilweise herausmitteln.
4.3 Simulation des optischen Übertragungssystems
Der Unterschied zwischen den zuvor gezeigten Messungen und den entsprechenden Simulationen ist im Wesentlichen auf den Einfluss des optischen Systems zurückzuführen. Der
Einfluss von Dispersion und die Größe der Lichtverluste sollen abgeschätzt werden.
4.3.1 Dispersion
In Hinblick auf die Zeitauflösung machen sich Dispersionseffekte bereits für Strahlen entlang der optischen Achse deutlich bemerkbar. Anhand einer Software für Optikdesign,
die in einer Datenbank die Wellenlängenabhängigkeit ddnλ der verwendeten Gläser bereit
hält, wurde für das optische System von HIGH1.Scr2 die optische Weglänge L entlang
4.3 Simulation des optischen Übertragungssystems
21
Abbildung 4.7: Simulationen des longitudinalen Phasenraum, passend zu Abbildung 4.6,
und seine Projektionen auf Zeit- und Impulsrichtung.
des Pfades P bestimmt. Diese ist direkt mit der Lichtlaufzeit t verknüpft:
L=
Z
nds
P
und
t=
Z
P
dt =
Z
P
ds
1
= L
cm
c0
(4.1)
(c0 : Lichtgeschwindigkeit im Vakuum, cm = cn0 : Lichtgeschwindigkeit im Medium). In
Abbildung 4.8 ist der simulierte Verlauf von t im sichtbaren Spektrum aufgetragen. Der
aus dieser Kurve bestimmte Wert von ∆t450nm−700nm = 28 ps liegt deutlich unter dem
gemessenen Wert (∼ 70 ps). In der Abschätzung bisher nicht berücksichtigt ist der Einfluss
der zwei Quarz-Fenster. Das erste trennt den Aerogel-Radiator vom Vakuum, das zweite
ist das Austrittsfenster des Strahlrohrs. Ab diesem Fenster ist auch der dispersive Einfluss
der umgebenden Luft zu berücksichtigen. Es zeigt sich jedoch, dass beide Korrekturen
geringfügig sind und zusammen 0,75 ps im Wellenlängenbereich 450–700 nm betragen,
für 10 mm Quarz und 30 m Luft. Die Dispersion im Quarz wurde ebenfalls anhand der
Software-Datenbank abgeschätzt. Luft wird von der Software nicht berücksichtigt und
wurde mit der modifizierten Edlén-Gleichung [Edl66], [Bir93], [Bir94] abgeschätzt.
22
4 Das derzeitige optische Übertragungssystem
Abbildung 4.8: Einfache Abschätzung der relativen Ankunftszeiten für die Wellenlängen
des sichtbaren Spektrums. Im selben Bild ist zum Vergleich die gemessene
Kurve aus Abbildung 4.4 gestrichelt eingezeichnet, sie wurde auf 40%
skaliert.
Da eine präzise Simulation der erreichbaren Zeitauflösung für die Beurteilung des zu entwickelnden Spiegelsystems sehr wichtig ist, wurde noch ein weiterer Ansatz untersucht:
Für zufällig ausgewählte Strahlen durch das optische System wurden Histogramme der
optischen Weglängen erstellt. Variiert wurden dabei Objektgröße und akzeptierte Winkelbereiche, zusätzlich wurden Störungen in das optische System eingebracht (ElementVerkippungen oder -Verschiebungen, Fehler in Elementdicken und Oberflächenfehler). Alle
diese Parameter haben jedoch nur geringe Auswirkung auf die Zeitauflösung1 . Auch diese
aufwändigere Methode bestimmt die Differenz der Ankunftszeiten zu ∆t450nm−700nm ≈
28 ps (Abbildung 4.9).
Die Diskrepanz von fast 50 ps zwischen Messung und Simulation der relativen Ankunftszeiten ist bisher nicht verstanden. Der Einfluss der Farbfilter wurde nicht in der Simulation berücksichtigt, wie oben besprochen, kann dieser jedoch eine solche Abweichung
nicht erklären. Ebenfalls nicht in der Simulation berücksichtigt ist die Dicke des AerogelRadiators, welche eine Verbreiterung der Eingangsverteilung bewirkt. Diese Verbreiterung wird in [Bäh07] angegeben mit etwa 1 ps (RMS-Breite, für n = 1,008, d = 30 mm,
p = 15,7 MeV) und hat nur eine geringfügige Wellenlängenabhängigkeit. Sie kann die genannte Abweichung daher ebenfalls nicht erklären. Die tatsächliche Dicke einer Stichprobe
von Linsen wurde gemessen, die Werte wichen um maximal 0,2 mm von den Katalogwerten ab (weniger als 1%).
Die zuerst beschriebene Methode zur Abschätzung der Zeitauflösung berücksichtigt ausschließlich Dispersionseffekte, während die zweite auch geometrische Weglängenunterschiede einbezieht. Beide Vorhersagen kommen jedoch zu einem vergleichbaren Ergeb1
Die Abbildungsqualität, welche sich durchaus mit den Parametern ändert, wird hierbei nicht beachtet.
4.3 Simulation des optischen Übertragungssystems
23
Abbildung 4.9: Detaillierte Simulation der relativen Ankunftszeiten, die auch geometrische Effekte berücksichtigt. Es wurde ein homogenes Spektrum von 450–
700 nm angenommen. Einschränkungen des Winkelbereichs oder Justierungenauigkeiten im System ändern die Form der Verteilung nicht.
nis. Es ist daher möglich, dass die zweite Methode grundsätzlich korrekt funktioniert,
den Einfluss der Dispersion aber auf gleiche Weise zu niedrig abschätzt. Im Kapitel über
numerische Methoden wird die Korrektheit dieser Methode noch anhand eines weiteren
Vergleichs überprüft, in dem Dispersion keine Rolle spielt (Abschnitt 6.2).
Die vom Hersteller gemessene Transmissionskurve des 550-nm-Filters wurde in der Software modelliert, und obige Abschätzungen wurden für das System mit Filter wiederholt,
dies ist in den Abbildungen 4.10 und 4.11 gezeigt. Auch hier ergeben beide Methoden
übereinstimmend einen zu geringen Wert von etwa 1,2 ps (gemessen wurden 3,2 ps, siehe
Abb. 4.4).
Bis die Ursache der Diskrepanz verstanden ist, wird für die simulierte Zeitauflösung von
Linsensystemen ein Korrekturfaktor von 2,5 verwendet. Als nächster Schritt in dieser
Richtung scheint sinnvoll, die durch die verschiedenen Farbfilter eingeführte Verzögerung
genauer zu bestimmen, da diese nur sehr grob abgeschätzt werden konnte. Für Spiegelsysteme, deren Zeitauflösung vermutlich auf rein geometrische Weise ermittelt werden kann,
wird der Korrekturfaktor nicht verwendet.
24
4 Das derzeitige optische Übertragungssystem
Abbildung 4.10
Einfache Abschätzung der relativen Ankunftszeiten bei Verwendung eines 550-nm-Filters.
Abbildung 4.11: Detaillierte Simulation der relativen Ankunftszeiten bei Verwendung
eines 550-nm-Filters. Das Maximum der Kurven ist jeweils auf 1 normiert. Die Verteilung ändert sich nur wenig, wenn der Winkelbereich
eingeschränkt wird. Justierungenauigkeiten können zu einer minimalen
Verbreiterung und einer Verschiebung des Schwerpunkts führen.
4.4 Probleme des derzeitigen Systems
25
4.3.2 Absorption, Reflektion, Streuung
Lichtverluste durch Absorption im Linsenmaterial können aus den Absorptionskoeffizienten α und Dicken d der beteiligten Gläser abgeschätzt werden. Die Transmission T eines
Glases ist dann gegeben durch T = exp (−α · d), die gesamte Transmission ergibt sich
durch Multiplikation der Werte für die rund 20 verschiedenen Gläser. Absorptionskoeffizienten und Transmission sind wellenlängenabhängig, man erhält die in Abbildung 4.12
gezeigte Transmissionskurve.
Durch eine Antireflex-Beschichtung wird für die Mehrzahl der verwendeten Linsen die
Reflektion an der Oberfläche gering gehalten, laut Hersteller liegt sie unterhalb von 1%
im Bereich von 450 nm bis 700 nm [Lin08]. Für einige hochwertige Objektive konnte keine
solche Angabe gefunden werden. Nimmt man keine besondere Beschichtung an, so schätzt
2
−n1
man die Lichtverluste durch Reflektion bei senkrechtem Lichteinfall mit R = nn22 +n
1
zu insgesamt rund 90% ab (89,7% für 450 nm, 88,5% für 700 nm), berechnet für die
Eingangsoptik von HIGH1.Scr2 im Sommer 2007. Geht man für alle Oberflächen von einer
speziellen Beschichtung aus und nimmt einen Verlust von 1% pro Luft-Glas-Übergang an,
so beträgt der Gesamtverlust noch immer 40,7%. Das reflektierte Licht trägt in einer
konventionellen Abbildung zu einer Kontrastverschlechterung bei, da es, sofern es auf die
Bildfläche gelangt, den Hintergrund aufhellt. Bei der Untersuchung der zeitlichen Struktur
tritt dieser Effekt in geringerem Maße auf, da das mehrfach reflektierte Licht verzögert
an der Streak-Kamera ankommt und zu einem guten Teil nicht mehr im aufgezeichneten
Zeitfenster liegt1 .
Hinzu kommen noch Streuverluste durch die Rauigkeit der Linsenoberflächen, in der Luft
und im Glas.
4.4 Probleme des derzeitigen Systems
Die Verschlechterung der Zeitauflösung durch Dispersion in den Linsen, welche das Hauptproblem des derzeitigen Systems darstellt, wurde im vorangegangenen Kapitel in Experiment und Simulation untersucht. Eine Verbesserung der Zeitauflösung durch die Verwendung von Farbfiltern führt zu Lichtverlusten von wenigstens 96%. Die Verbreiterung
der Eingangsverteilung liegt dabei mit 3 ps noch immer über der mit der Streak-Kamera
erreichbaren Auflösung von 2 ps.
Die durch den Beschleuniger verursachte Sekundärstrahlung im Tunnel beschädigt die
Linsen: Die Transmission im optischen Spektrum wird stark verringert, die Linse erscheint
braun gefärbt. In der Messperiode 2007 hat der ungewöhnliche hohe Dunkelstrom der
1
Aufgezeichnet wird ein Zeitfenster von 140 ps Dauer, dies entspricht einem Lichtweg von 42 mm. Nur
für Gläser mit n · d < 21 mm bzw. Zwischenräume mit d < 21 mm kann das zweifach reflektierte
Licht störend wirken. Solche Gläser und Zwischenräume sind im System vorhanden, eine auffällige
Kontrastverschlechterung wurde aber nicht beobachtet. Eine Überlagerung von Verteilungen, die zu
verschiedenen Elektronenpaketen gehören, ist hingegen ausgeschlossen, da deren zeitliche Abstände
mit 1 µs zu groß sind (1 µs=300
ˆ
m Lichtweg).
26
4 Das derzeitige optische Übertragungssystem
Abbildung 4.12: Simulierte Transmission des optischen Transportsystems einschließlich
der Eingangsoptik für HIGH1.Scr2. Nur Absorptionsverluste sind berücksichtigt, da Reflektions- und Streuverluste stark von den verwendeten Beschichtungen abhängen und diese nicht für alle Gläser bekannt
sind.
Quelle zu einer so hohen Strahlenbelastung geführt, dass das optische Transportsystem nur
noch eingeschränkt benutzt werden konnte, eine Messung des longitudinalen Phasenraums
war nicht möglich. Am Ende der Messperiode lag die Transmission für zahlreiche Linsen
unter 10%, in drei Fällen sogar unter 1%, jeweils bezogen auf eine neuwertige Linse gleicher
Bauart und eine Wellenlänge von 500 nm.
Der zugrunde liegende Prozess ist nicht bekannt, er ist jedoch reversibel: Erhitzen der Linsen führt zu einer Erholung der Transmission. Einen Eindruck davon soll Abbildung 4.13
vermitteln. Der Grad der Erholung hängt u.a. von der verwendeten Temperatur ab, je
nach Linsenmaterial und verwendetem Kitt ist eine andere Maximaltemperatur möglich.
Die Erholung durch das Erhitzen konnte mit einem empirischen Modell näherungsweise
beschrieben werden: Das Modell geht davon aus, dass die Transmission
T bei der Wel
max
−t/τ
· 1−e
dem Sättigungswert Tλmax
lenlänge λ beim Erhitzen gemäß Tλ (t) = Tλ
entgegenstrebt. Dieser Sättigungswert und die Zeitkonstante τ werden von der Wellenlänge und vom Typ der Linse abhängen. Der Sättigungswert ist überdies stark von der
verwendeten Temperatur abhängig. Für eine bestimmte Linse, eine konstant gewählte
Temperatur, und eine feste Dauer ∆t des Erhitzens, sagt das Modell folgenden linearen Zusammenhang zwischen der zu erwartenden Verbesserung ∆Tλ und dem vorherigen
Zustand der Linse voraus:
∆Tλ = Tλ (t0 + ∆t) − Tλ (t0 ) = (Tλmax − Tλ (t0 )) · 1 − e−∆t/τ
|
{z
konst.
(4.2)
}
In Abbildung 4.14 ist für einen Satz baugleicher Linsen, die zusammen für einige Ta-
4.5 Andere Ansätze mit refraktiver Optik
27
Abbildung 4.13: Strahlungsschäden an den Linsen und Erholung durch Erhitzen.
Für die links abgebildete Linse ist die anfängliche relative Transmission und ihre Verbesserung
durch mehrtägiges Erhitzen zunächst auf 120°C und dann auf 200°C dargestellt, jeweils bezogen
auf eine neuwertige Linse gleicher Bauart.
ge bei 200°C erhitzt wurden, die Verbesserung der Transmission gegen die Transmission
vor dem Erhitzen, T0 , aufgetragen. Die Abweichung vom linearen Zusammenhang kann
zum Teil dadurch erklärt werden, dass die Transmissionmessungen nicht genau waren
(ca. 8% Unsicherheit in relativer Transmission) und die Temperaturverteilung im Ofen
nicht gleichmäßig war. Interessant ist vor allem der Schnittpunkt des linearen Fits mit
der T0 -Achse, da dieser den zu erwartenden Sättigungswert angibt. So kann man erkennen, dass diese Linsen durch Ausheizen bei 200°C für 400 nm nicht mehr als 80% ihrer
ursprünglichen Transmission erreichen werden.
4.5 Andere Ansätze mit refraktiver Optik
Betrachtet man nur die Lichtlaufzeiten entlang der optischen Achse, so könnte die Zeitauflösung erheblich verbessert werden, wenn die achromatischen Doublet-Linsen durch
dünnere Einzellinsen ersetzt würden. Man würde dabei aber eine Verschlechterung der
räumlichen Auflösung in Kauf nehmen, insbesondere durch sphärische Aberration, die
bei achromatischen Linsen korrigiert ist1 . Diese Verschlechterung macht sich dann auch
in der Zeitauflösung bemerkbar: Die Lichtlaufzeit ändert sich mit dem Einfallswinkel.
1
Das Doublet hat gegenüber dem Singlet zwei zusätzliche Freiheitsgrade: Einen Krümmungsradius und
eine Glaswahl. Dadurch kann neben einer Reduktion der Farbfehler auch die sphärische Aberration
beseitigt werden.
28
4 Das derzeitige optische Übertragungssystem
Abbildung 4.14
Zusammenhang zwischen Transmission vor dem Erhitzen und der dabei erreichten Verbesserung
für einen Satz baugleicher Linsen (Achromate mit f = 500 mm von Linos), die bei 200°C für
einige Tage erhitzt wurden. Die Werte sind jeweils auf eine neuwertige Linse gleicher Bauart
bezogen. Abweichungen sind durch Messunsicherheiten zu erklären, sowie die nicht homogene
Temperaturverteilung im Ofen.
Dieser Fehler kann nicht mit Farbfiltern reduziert werden.
Umgekehrt verbessert sich die Zeitauflösung nicht oder nur unerheblich, falls Apochromate verwendet werden. Bei diesen handelt es sich um Tripletts, die Farbfehler und Aberrationen weiter reduzieren. Bei geeigneter Wahl des Materials sind sie nur wenig (optisch)
dicker als Achromate. Abschätzungen zeigen, dass sich die Verwendung von Apochromaten in Hinblick auf die Zeitauflösung nicht lohnt, da das Hauptproblem, die Laufzeitunterschiede für verschiedene Wellenlängen bereits auf der optischen Achse, nicht beseitigt
wird. Die transversale Auflösung verbessert sich jedoch. Ein Überblick über die erwarteten Zeitauflösungen für Singletts, Doubletts und Tripletts ist in Abbildung 4.15 zu sehen.
In dieser Simulation wurde ein Linsenpaar im 4f-Schema für einen Transport über 5 m
verwendet. Hier müsste eine Zeitauflösung von etwa 300 fs erreicht werden, da das vollständige System etwa 30 m lang sein wird und eine Zeitauflösung von 2 ps benötigt. Diese
Anforderung wird von keinem der Ansätze erfüllt.
Ein ausgefallener, nicht experimentell untersuchter Ansatz wäre die Verwendung von Gläsern mit anomaler Dispersion. Diese ist eine Eigenschaft von speziellen Gläsern, bei denen
in einem schmalen Wellenlängenbereich das gewöhnliche Dispersionsverhalten umgekehrt
ist, also ddnλ > 1 gilt. Sie kommt durch Resonanz mit einer atomaren Anregung im Glas zustande, deren Energie einer Wellenlänge im sichtbaren Spektrum entspricht (gewöhnliche
Dispersion kommt durch eine solche Resonanz im Ultravioletten zustande). Diese Resonanz geht zwangsläufig mit einer starken Absorption einher (siehe z.B. [Fey01], S. 427).
4.6 Motivation: Reflektive Optik
29
Die Transmission wird dadurch nahe der Resonanz praktisch auf Null reduziert, ansonsten wäre es denkbar, die Dispersionseffekte der übrigen Gläser durch anomale Dispersion
teilweise zu kompensieren und die optische Weglänge für verschiedene Wellenlängen anzugleichen.
Abbildung 4.15: Vergleich der Zeitauflösung von Einzellinse, Achromat und Apochromat.
Es wurde die Abbildung eines punktförmigen Gegenstandes mit einem Linsenpaar über eine Distanz von 5 m untersucht (Abbildungsmaßstab 1, Apertur f /D = 8,3). Die Abhängigkeit von der
Wellenlänge ist für eine Einzellinse am geringsten, dafür ändert sich hier die Lichtlaufzeit mit dem
Einfallswinkel in einem Bereich von bis zu 0,8 ps (Achromate: 80 fs, Apochromate: 20 fs).
4.6 Motivation: Reflektive Optik
In dieser Diplomarbeit soll als alternativer Ansatz die Verwendung von Spiegeloptik für
das optische Übertragungssystem untersucht werden. Die Abbildung mit Spiegeln ist nicht
abhängig von der verwendeten Wellenlänge1 . Die Dispersion in den Quarz-Fenstern und
in Luft wurde in Abschnitt 4.3.2 mit 0,75 ps abgeschätzt, bezogen auf einen Wellenlängenbereich von 450–700 nm. Der beim Einsatz von reflektiver Optik relevante Bereich ist
aber größer, da das Cherenkov-Spektrum kontinuierlich ist, und sowohl Streak-Kamera
als auch (geeignet beschichtete) Spiegel nicht auf das sichtbare Spektrum beschränkt sind.
Es wird daher auch bei Verwendung von reflektiver Optik ein Farbfilter erforderlich sein,
dieser kann jedoch vergleichsweise breitbandig sein.
Mit einer Beschichtung aus Silber lässt sich eine Reflektivität R von 98% im Wellenlängenbereich 500–800 nm erzielen [Edm08]. Geht man von einem Spiegel pro Meter aus, be1
Für sehr hochwertige Spiegel in einem hoch korrigierten System kann es geringe Farbfehler geben, da
die Größe der Beugungsscheibchen wellenlängenabhängig ist.
30
4 Das derzeitige optische Übertragungssystem
trägt der Lichtverlust über 30 m dann insgesamt 45%. Für eine Aluminium-Beschichtung
(R ≈0.9) und 30 Spiegel verliert man bereits rund 95% des Lichtes. Das zu entwerfende
System sollte daher mit weniger als einem Spiegel pro Meter auskommen. Für das Linsensystem konnten Lichtverluste durch Absorption nur grob abgeschätzt werden, betragen
aber mindestens 40% (siehe Abschnitt 4.3.2). Auch für die Spiegel kommen noch Streuverluste durch Oberflächenrauigkeit hinzu. Spiegel haben eine geringe Strahlungsempfindlichkeit: Bei den bereits jetzt im optischen System vorhandenen Planspiegeln wurde keinerlei
Verfärbung beobachtet, obwohl sie der gleichen Strahlung wie die Linsen ausgesetzt waren.
Die Abbildung mit Spiegeln wird also erheblich lichtstärker sein, die Wartungsarbeiten
durch Strahlenschäden entfallen. Nachteile im Vergleich zur Linsenoptik ergeben sich aus
der für Spiegel erforderlichen aufwändigeren Geometrie. Dies führt zu längeren Lichtwegen
und damit einer Verstärkung der Dispersion in Luft, Lichtverlusten durch die gegenseitige
Verdeckung der Spiegel, sowie zu einer geringeren erreichbaren Justiergenauigkeit. Diese
Punkte sind beim Entwurf eines Spiegelsystems zu berücksichtigen.
5 Grundlagen abbildender Systeme
Grundlegende Konzepte und Begriffe der Optik werden eingeführt, um damit später geeignete Ansätze für Spiegelsysteme zu finden. Zuerst wird auf die paraxiale Näherung
eingegangen, die als Näherungsrechnung erster Ordnung aufgefasst werden kann (Abschnitt 5.1). Korrekturen höherer Ordnung werden besprochen, insbesondere wird auf die
Seidel-Aberrationen eingegangen, da diese später die Einordnung von Abbildungsfehlern
ermöglichen (Abschnitt 5.2). Alternativ zu einer Reihenentwicklung der Abbildungsfehler
gibt es analytische Kriterien für eine korrekte Abbildung (Abschnitt 5.3).
Nach diesen allgemeinen Betrachtungen werden Abbildungen mit Spiegeln untersucht.
Häufig sind Spiegeloberflächen nicht sphärisch geformt, die Bedeutung von Kegelschnitten
als Form von Spiegeloberflächen wird erklärt (Abschnitt 5.4).
5.1 Paraxiale Näherung
Die paraxiale Näherung geht von rotationssymmetrischen Systemen mit kleinen Abständen zur optischen Achse und kleinen Steigungen aus. Abstand und Steigung eines Strahls
werden in einem Vektor zusammengefasst, und die Wirkung optischer Elemente wird
durch eine 2×2-Matrix beschrieben. Trotz seiner Einfachheit sind mit diesem Ansatz bereits viele wichtige Aussagen möglich:
• Abbildungsbedingung für eine dünne Linse mit Brennweite f , mit Gegenstandsweite
g und Bildweite b: g1 + 1b = f1
• Bei dicken Linsen oder Linsensystemen gilt die Abbildungsbedingung für Paare
konjugierter Ebenen (Hauptebenen oder Knotenebenen), wobei f dann die Systembrennweite bezeichnet.
• Auch für Spiegel gilt die Abbildungsbedingung. Liegen Bild und Gegenstand auf
derselben Seite des Spiegels, so tragen sie das gleiche Vorzeichen.
• Abbildungsmaßstab: m =
B
G
= gb , mit Gegenstandsgröße G und Bildgröße B.
• Unter Verwendung des Brechungsgesetzes
findet man die Linsenmacher-Gleichung
1
1
1
(für dünne Linsen): f = (n − 1) · r1 − r2
• Für Spiegel findet man entsprechend (n = −1, r1 = ∞, r2 = r):
1
f
=
2
r
• Die Brechkräfte Di von aufeinander folgenden Elementen werden addiert:
P
Dgesamt = Di
(D ≡ f1 )
31
32
5 Grundlagen abbildender Systeme
Nicht beschrieben werden können z.B. Oberflächen, deren Gestalt nicht sphärisch ist, da
sich diese Formabweichung für (infinitesimal) achsnahe Strahlen nicht bemerkbar macht.
Insbesondere für Spiegeloberflächen werden solche Formen oft gewählt.
Unter Gaußscher Optik versteht man die Erweiterung der paraxialen Näherung für endliche Abstände und Winkel. Man fasst obige Gleichungen, insbesondere die Abbildungsbedingung, als Definition eines idealen Systems auf und versucht die nötigen Korrekturterme
durch Gestaltung des optischen Systems möglichst gering zu halten. Die so definierte ideale Bildebene wird auch Gaußsche Bildebene genannt.
5.2 Korrekturen höherer Ordnung, Seidel-Aberrationen
In diesem Abschnitt wird der Darstellung aus [Mes99] gefolgt. Abbildungsfehler können
formal in verschiedene Ordnungen eingeteilt werden. Wir beschreiben den Strahlverlauf
ausgehend von r0 = x0 + iy0 mit der Steigung r00 entlang der optischen Achse z durch
eine komplexe Funktion und entwickeln sie als Laurent-Reihe:
∗
r(z) = f (z; r0 ,r0∗ ,r00 ,r00 )
=
(5.1)
γ ∗δ
Cαβγδ (z)r0α r0∗β r0 0 r00
α,β,γ,δ≥0
(5.2)
X
Eine Drehung in der Gegenstandsebene r0 → r0 eiϑ muss eine entsprechende Drehung in
der Bildebene zur Folge haben:
r · eiϑ =
X
γ
Cαβγδ r0α r0∗β r0 0 r00
∗δ
· eiϑ(α−β+γ−δ)
(5.3)
α,β,γ,δ≥0
⇒α − β + γ − δ = 1
(5.4)
Für eine Spiegelung an der optischen Achse r0 → −r0 muss auch r das Vorzeichen wechseln, damit ergibt sich:
!
− 1 = (−1)α+β+γ+δ
⇒ α + β + γ + δ = 1, 3, 5, ...
(5.5)
(5.6)
Diese Bedingung legt die Ordnung der Korrektur fest, nur ungerade Ordnungen können
auftreten. In erster Ordnung findet man, dass α + γ = 1 und β = δ = 0, es gibt also
nur zwei erlaubte Terme: r(z) = C1000 (z) · r0 + C0010 (z) · r00 . Dies entspricht gerade der
paraxialen Näherung.
In dritter Ordnung gibt es bereits sechs erlaubte Terme, die sogenannten Seidel-Aberrationen, die entsprechenden Koeffizienten Cαβγδ werden Seidelkoeffizienten genannt. Sie
werden in den Tabellen 5.1 und 5.2 beschrieben. Dieses Schema kann in höhere Ordnungen fortgesetzt werden, dies ist aber bei der Verwendung numerischer Methoden zur
System-Optimierung nicht von Interesse. Für nicht-radialsymmetrische Systeme, wie sie
z.B. in Kapitel 8 untersucht werden, sind Seidel-Aberrationen nicht definiert. Da aber die
5.2 Korrekturen höherer Ordnung, Seidel-Aberrationen
33
auftretenden Bildfehler ähnliche Gestalt haben, werden die gleichen Begriffe benutzt.
Die Eintrittspupille ist definiert als das Bild der strahlbegrenzenden Stelle des Systems,
vom Gegenstand aus gesehen. In einem Spiegelsystem ist dies häufig die erste Spiegelfläche. Für Systeme, in denen die Eintrittspupille des optischen Systems nicht mittig zur
optischen Achse platziert ist, weil z.B. nur ein Segment eines Spiegels verwendet wird, ändern sich die typischen Formen der Aberrationen. Zusätzlich gibt es einen Einfluss der verschiedenen Terme aufeinander: so induzieren z.B. Koma und Astigmatismus verschiedene
neue Formen der Verzeichnung. Die genaue Beschreibung der entstehenden Muster übersteigt den Rahmen dieser Arbeit, eine ausführliche Beschreibung von Seidel-Aberrationen
in Spiegelsystem ist in [Kor91], Kapitel 6 zu finden.
Bezeichnung
∝
α
β
γ
δ
Sphärische Aberration
r03
0
0
2
1
Koma
(2 Terme)
r0 2 r
1
0
0
1
1
2
1
0
Astigmatismus
r0 r2
1
1
1
0
Bildfeldkrümmung
r0 r2
2
0
0
1
Verzeichnung
r3
2
1
0
0
Kommentar
Tritt bereits für Gegenstandspunkte
auf der optischen Achse auf. Sie führt
dazu, dass sich Strahlenkegel mit unterschiedlichen Öffnungswinkeln in unterschiedlichen Bildpunkten treffen.
Für Gegenstandspunkte seitlich der optischen Achse verschiebt sich die Lage des Bildpunktes, je weiter außen
die Strahlen verlaufen („Öffnungsfehler
schiefer Bündel“)
Sagittale und meridionale Strahlen
werden nicht im gleichen Abstand fokussiert.
Abhängig von ihrer radialen Position haben Gegenstandspunkte eine unterschiedliche Bildweite. Die Bildfläche
müsste daher gekrümmt sein, damit ein
scharfes Bild entsteht.
Das Bild wird nach außen hin verformt,
ohne dass die Auflösung verschlechtert
wird. Die Verzeichnung ist nur vom Radius abhängig und macht sich daher besonders bei ausgedehnten Gegenständen bemerkbar.
Tabelle 5.1: Seidel-Aberrationen (siehe auch Beispiele in Tabelle 5.2).
34
5 Grundlagen abbildender Systeme
Abhängig vom Öffnungswinkel
entsteht das Bild an einem anderen Punkt (obere Abb.). Nirgends entsteht ein perfekter Bildpunkt, es gibt lediglich ein Minimum im Verlauf der Strahltaille
(untere Abb.).
Sphärische Aberration
Die Lage des Bildpunktes verschiebt sich mit dem Öffnungswinkel (links), es entsteht ein kometenartiger Schweif (rechts).
Koma
Sagittale und meridionale Strahlen vereinigen sich in verschiedenen Brennpunkten, zwischen
ihnen liegt der Punkt geringster Zerstreuung (obere Abb.,
aus [Mes99]). Je nach gewählter Bildebene ist das Bild eines
punktförmigen Gegenstandes unterschiedlich ausgedehnt (untere
Abb., aus [Gob78]). Radial nach
außen verlaufende und ringförmige Gegenstände können daher
nicht gleichzeitig scharf abgebildet werden.
Für Systeme mit radialsymmetrischer Eintrittspupille auf der optischen Achse gibt es nur zwei
Formen der Verzeichnung, kissenförmig (links) und tonnenförmig (rechts). Befindet sich die
Eintrittspupille seitlich der optischen Achse, wie z.B. bei OffAxis-Spiegeln, kommen weitere
Formen hinzu.
Astigmatismus
Verzeichnung
Tabelle 5.2: Entstehung und typische Formen einiger Seidel-Aberrationen.
5.3 Stigmatische und aplanatische Abbildungen, Lichtlaufzeit
35
5.3 Stigmatische und aplanatische Abbildungen, Lichtlaufzeit
Neben einer Reihenentwicklung der Korrekturterme gibt es exakte analytische Bedingungen für eine korrekte Abbildung. Zunächst ist die Bedingung für eine stigmatische Abbildung zu nennen. Bei einer stigmatischen Abbildung treffen sich alle Strahlen, die vom
Gegenstandspunkt auf der optischen Achse ausgehen, in einem gemeinsamen Bildpunkt.
Für einen einzelnen Spiegel kann aus dieser Bedingung bereits rein geometrisch seine
Oberflächenform bestimmt werden. Solche Spiegel nennt man kartesische Reflektoren, alle in dieser Arbeit untersuchten Spiegel fallen in diese Kategorie. Ihre Formen werden in
Abschnitt 5.4 vorgestellt. Für ein allgemeines optisches System verwendet man eine Bedingung, die auf dem Fermatschen Prinzip beruht: Ein physikalischer Strahlenverlauf stellt
ein lokales Extremum der optischen Weglänge L dar. Bei einer stigmatischen Abbildung
gibt es nun in einem ausgedehnten Bereich weitere, physikalisch zulässige Strahlenverläufe, die kontinuierlich durch einen Parameter κ ineinander überführt werden können. Für
diese Strahlverläufe stellt die optische Weglänge Lκ ebenfalls ein Extremum dar. Der Extremwert muss jedoch derselbe sein, dies ist gerade wieder die Aussage des Fermatschen
Prinzips: ddLκκ = 0. Daher lautet die Bedingung für eine stigmatische Abbildung:
L = konst. für die zur Abbildung beitragenden Strahlen
(5.7)
Für die Lichtlaufzeit durch das System gilt t = c10 L (siehe Gl. (4.1)). Es liegt daher nahe,
für eine stigmatische Abbildung anzunehmen, dass auch t = konst. gelten müsse. Dies ist
jedoch nicht der Fall, da das Fermatsche Prinzip nur auf jeweils eine einzelne Wellenlänge
angewendet werden kann1 . Insbesondere für ein Linsensystem ist diese Annahme daher
nicht zutreffend. Für ein Spiegelsystem, in dem die Strahlverläufe nicht von der Wellenlänge abhängen, ist sie aber gültig, so dass man zu folgender „Arbeitsanweisung” gelangt:
Bei der Entwicklung eines Spiegelsystems mit guter zeitlicher Auf lösung ist es
sinnvoll, zunächst eine gute räumliche Abbildung anzustreben, da dann wahrscheinlich auch eine gute zeitliche Abbildung erreicht wird. Ansätze für Systeme
mit guter räumlicher Abbildung findet man in der Literatur, so dass man nun eine Vielzahl an zu untersuchenden Kandidaten hat. Da der Zusammenhang nur für eine perfekte
Abbildung und nur auf der optischen Achse gilt, muss in einem zweiten Arbeitsschritt die
erreichbare Zeitauflösung beurteilt werden.
Stigmatismus bezieht sich zunächst nur auf einen Gegenstandspunkt auf der optischen
Achse und den zugehörigen Bildpunkt. Damit auch ein flächenhafter Gegenstand korrekt
abgebildet wird, müssen auch einander entsprechende Punkte in einer Umgebung der
optischen Achse stigmatische Paare bilden. Eine solche Abbildung nennt man aplanatisch.
Als geometrische Bedingung ausgedrückt bedeutet dies, dass eine Änderung der optischen
Weglänge auf der Gegenstandsseite durch eine entgegengesetzt gleiche Änderung auf der
Bildseite kompensiert werden muss. Daraus ergibt sich (siehe z.B. [Kor91] S. 304ff) die
1
Man bestimmt das Extremum durch Variation des Weges, nicht durch Änderung der Wellenlänge.
36
5 Grundlagen abbildender Systeme
Abbe-Bedingung:
sin γ
= ms
sin γ 0
(5.8)
Dabei bezeichnen γ, γ 0 die Strahlwinkel zur optischen Achse in Gegenstands- bzw. Bildraum.
ms ist die laterale Vergrößerung (Quervergrößerung) des Gesamtsystems.
Aufgrund der Dicke der Cherenkov-Radiatoren ist es auch wichtig, dass sich die Abbildungsqualität entlang der optischen Achse nur langsam ändert (Tiefenschärfe). Aus dieser
Forderung erhält man die Herschel-Bedingung ([Kor91] S. 307f):
cos γ − 1
= ms
cos γ 0 ± 1
(5.9)
Das Vorzeichen im Nenner hängt davon ab, ob die Anzahl k der Spiegel im System gerade (+) oder ungerade (−) ist. ms ist die Längsvergrößerung des Systems, also die Vergrößerung entlang der optischen Achse zwischen Gegenstand und Bild. Sie hängt mit der
Quervergrößerung zusammen: ms = (−1)k (ms )2 . Abbe- und Herschel-Bedingung können
nur für Systeme mit ms = ±1 gleichzeitig erfüllt werden ([Kor91] S. 311f). Für vergrößernde oder verkleinernde Systeme muss ein Kompromiss gefunden werden.
Um einen Zusammenhang zwischen Aberrationskoeffizienten (also Reihenentwicklungen)
und den in allen Ordnungen exakten Begriffen herzustellen, nennt man ein System, das
frei von sphärischer Aberration und Koma ist, aplanatisch in dritter Ordnung. Wenn es
auch frei von Astigmatismus ist, wird es anastigmatisch in dritter Ordnung genannt.
5.4 Kartesische Reflektoren
In diesem Abschnitt wird der Darstellung aus [Kor91] gefolgt. Ein Spiegel, der eine stigmatische Abbildung ermöglicht, wird kartesischer Reflektor genannt. Abbildung 5.1 zeigt
das Koordinatensystem zur Beschreibung der Reflektion: Ein Lichtstrahl ausgehend von
A (ξ, η) in der Gegenstandsebene werde von einem Spiegel im Abstand s, dessen Oberfläche durch z = f (x, y) beschrieben wird, reflektiert und schneide die Bildebene, welche
sich im Abstand s0 vom Spiegel befindet, im Punkt A0 (ξ 0 , η 0 ). Dieser Punkt kann dann
bestimmt werden zu ([Kor91], S. 13f):
ξ0 =
η0 =
1
∂z 0
2T1 x −
s − z + T2 x s − s0 + ξ s0 − z
(5.10)
2T1 + T2 (s − z)
∂x
∂z 0
1
0
0
(5.11)
2T1 y −
s − z + T2 y s − s + η s − z
2T1 + T2 (s − z)
∂y
5.4 Kartesische Reflektoren
37
∂z
∂z
(ξ − x) +
(η − y) − (s − z)
∂x
∂y
2
∂z 2
∂z
und T2 = 1 +
+
∂x
∂y
mit T1 =
Abbildung 5.1: Koordinatensysteme zur Beschreibung der Reflektion (aus [Kor91]).
In einem rotationssymmetrischen System kann man ohne Verlust an Allgemeinheit y =
η = η 0 = 0 wählen und nur einen Schnitt durch das System betrachten. Die Bedingung
für eine stigmatische Abbildung ist dann ξ 0 = 0 für ξ = 0. Man setzt also Gl. (5.10)
zu Null und löst die resultierende Differentialgleichung. Man erhält für die Form eines
kartesischen Reflektors:
z(x) =
1+
mit r =
x2 /r
1 − (1 + δ) x2 /r2
(5.12)
p
2ss0
s + s0
und
1+δ =
4ss0
(s + s0 )2
(5.13)
Durch geeignete Umformung von Gl. (5.12) erhält man eine quadratische Gleichung in x
und z. Jede quadratische Gleichung in zwei Variablen beschreibt einen Kegelschnitt. Für
δ = 0 beschreibt z(x) einen Kreis mit Radius r. δ beschreibt daher die Abweichung von
der Kreisform und wird Deformationskonstante oder konische Konstante genannt. Aus
den Gl. in (5.13) folgt auch
1
1
2
+ 0 =
s s
r
und
1+δ =
r2
ss0
(5.14)
Aus der ersten Bedingung wird für gegebene Gegenstands- und Bildweite der korrekte
38
5 Grundlagen abbildender Systeme
Krümmungsradius des Spiegels (auf der optischen Achse) bestimmt, aus der zweiten Bedingung dann die konische Konstante. Für ein System aus mehreren Spiegeln kann es
sinnvoll sein, die zweite Bedingung zu verletzen – man gibt die strenge Bedingung des
Stigmatismus auf und korrigiert die sphärische Aberration nur in 3. Ordnung. Für jede
Spiegelfläche gewinnt man einen freien Parameter und kann neben der sphärischen Aberration noch weitere Aberrationen 3. Ordnung beseitigen.
Eine Beschreibung der verschiedenen Kegelschnitte ist in Tabelle 5.3 gegeben, in Abbildung 5.2 sind einige Beispiele gezeigt. Die Rolle von Gegenstands- und Bildpunkt kann
getauscht werden. Die vollständige Spiegelform erhält man durch Rotation des Kegelschnitts um die optische Achse (z-Achse).
Form
Sphärisch
Prolater Ellipsoid
Oblater Ellipsoid
Paraboloid
Hyperboloid
Konische
Konstante
δ=0
−1 < δ < 0
δ>0
δ = −1
δ < −1
Gegenstands- und Bildweite,
Besonderheiten
0
s = s = r, Punkte fallen zusammen
s 6= s0
0
s = s , Punkte liegen seitlich der optischen Achse
s = 2r und s0 = ∞, oder umgekehrt
s 6= s0 , Bild oder Gegenstand ist virtuell
Tabelle 5.3: Abbildungseigenschaften der Kegelschnitte.
5.4 Kartesische Reflektoren
39
Oblater Ellipsoid
Prolater Ellipsoid
Erst durch die Rotation um die optische Achse (z) entstehen unterschiedliche Formen.
Paraboloid. Ein Punkt liegt im Unendlichen, der andere kann reell oder virtuell sein.
Hyperboloid. Nur ein Ast der Hyperbel trägt zur Abbildung bei,
zur Konstruktion sind jedoch beide Brennpunkte erforderlich. Entweder Bildpunkt oder Gegenstandspunkt sind virtuell.
Abbildung 5.2: Beispiele zu Formen und Strahlverläufen von Kegelschnitten.
6 Numerische Untersuchung optischer Systeme
Numerische Methoden können eingesetzt werden, um ein bestehendes optisches System
zu charakterisieren und es zu verbessern. Viele dieser Methoden basieren auf Raytracing,
also der numerischen Bestimmung des Verlaufs einzelner Strahlen durch das optische System. Dieses Verfahren kann überall dort verwendet werden, wo die Wellennatur des Lichtes
keine Rolle spielt. Bei PITZ wird die kommerzielle Software ZEMAX zur Gestaltung optischer Systeme verwendet. Sie bietet zahlreiche Analyse- und Bearbeitungsfunktionen, die
hauptsächlich auf der Verwendung von mit Raytracing gewonnenen Daten basieren. Alle in den folgenden Kapiteln gezeigten Simulations-Ergebnisse wurden unter Verwendung
dieser Software gewonnen. Um zu überprüfen, dass sie korrekt benutzt wird, soll vorab ein
Spiegelsystem jeweils in der kommerziellen und in einer selbstgeschriebenen Software modelliert und untersucht werden. Zum Vergleich werden zuerst sogenannte Spot-Diagramme
erstellt: dazu wird ein Satz von Strahlverläufen durch das System berechnet und die in der
Bildebene entstehende Figur dargestellt. Als zweites wird an diesem System die Methode
zur Simulation der Zeitauflösung noch einmal überprüft.
6.1 Ergebnisse der kommerziellen Software
Ein System aus zwei Parabolspiegeln soll zum Testen eingesetzt werden (Abbildung 6.1).
Es wurde bewusst so gestaltet, dass eine Abbildung geringer Qualität entsteht, um ein
Spot-Diagramm mit deutlich erkennbarer Struktur zu erhalten. Insbesondere wird das
Licht zwischen den zwei Parabolspiegeln nicht parallel transportiert, wie es eigentlich
für eine gute Abbildung mit Parabolspiegeln erforderlich ist (siehe Abbildung 5.2). Die
Gegenstandsebene sei bei z0 = 0 mm, der erste Spiegel befinde sich bei z1 = 500 mm
und sei zur Lichtquelle hin gekrümmt mit ρ = 500 mm. Seine Brennweite ist f = ρ/2 =
250 mm, der Gegenstand steht also nicht im Brennpunkt. Der zweite Spiegel befinde sich
zwischen Lichtquelle und erstem Spiegel bei z2 = 300 mm und sei zum ersten Spiegel hin
gekrümmt mit ρ2 = 300 mm. Die Position der Bildebene bestimmt man durch zweimalige
Anwendung der Abbildungsbedingung f1 = g1 + 1b zu z3 = 400 mm. Dabei ist zu beachten,
dass das vom ersten Spiegel erzeugte Zwischenbild bei z = 0 mm auf der Rückseite des
zweiten Spiegels liegt und g daher ein negatives Vorzeichen trägt. Die Spiegeldurchmesser
seien D1 = 100 mm und D2 = 40 mm.
Um mehr Licht zu transportieren, wurde die gegenseitige Abschattung der Spiegel nicht
berücksichtigt. Dies ist unphysikalisch und kann in beiden Programmen behoben werden,
ist für den Test aber günstig. Durch Raytracing verschiedener Strahlen von einem festen
Bildpunkt zur Bildebene werden Spot-Diagramme erzeugt. Die Ergebnisse der kommerziellen Software sind in der linken Spalte von Abbildung 6.2 zu sehen. In Abbildung 6.3
40
6.2 Überprüfung mit C++-Programm
41
Abbildung 6.1: Aufbau des Raytracing-Testsystems. Die Strahlen gehen von verschiedenen Gegenstandspunkten bei z0 aus, treffen die Parabolspiegel bei z1 und
z2 und erreichen die Bildfläche bei z3 . Die gegenseitige Verdeckung der
Spiegel wird nicht berücksichtigt.
ist für dasselbe System die Verteilung der Ankunftszeiten gezeigt, welche mit dem in Abschnitt 4.3.1 vorgestellten Verfahren zur geometrischen Untersuchung der Zeitauflösung
gewonnen wurde.
6.2 Überprüfung mit C++-Programm
Als Teil dieser Arbeit wurde ein C++-Programm geschrieben, das objektorientiert Oberflächen und Lichtstrahlen behandelt. Die Geometrie von Parabolspiegeln wurde vollständig im Programm umgesetzt. Für einen Parabolspiegel kann der Auftreffpunkt eines Lichtstrahls ermittelt werden, die dazugehörige Oberflächennormale und schließlich der reflektierte Strahl bestimmt werden. Das Programm bietet die Möglichkeit, Rotationsmatrizen
zu berechnen und mit ihnen die Orientierung der Spiegel festzulegen. Auf diese Weise können auch aufwändige Geometrien beschrieben werden. Der Hauptteil des hier behandelten
Beispiels ist in Anhang A.1 wiedergegeben.
Im Programm wird zunächst die Spiegelgeometrie modelliert, dann werden die zu untersuchenden Strahlen festgelegt. Anschließend wird jeder Strahlverlauf über die verschiedenen
Spiegeloberflächen verfolgt. Die eigentliche Reflexion kann durch den objektorientierten
Ansatz sehr kompakt beschrieben werden (Zeile 28). Danach gibt das Programm die Koordinaten der Schnittpunkte der Strahlen mit der Bildebene aus. Die Koordinaten wurden
grafisch dargestellt, das Ergebnis ist in der rechten Spalte von Abbildung 6.2 zu sehen. Die
exakte Übereinstimmung legt nahe, dass beide Programme richtig arbeiten bzw. richtig
benutzt wurden. In Abbildung 6.3 ist rechts die im C++-Programm bestimmte Verteilung
der Ankunftszeiten gezeigt. Auch hier ist eine gute Übereinstimmung vorhanden.
42
6 Numerische Untersuchung optischer Systeme
Quelle auf der
optischen Achse
Quelle 5 mm
seitlich
Quelle 10 mm
seitlich
Vergrößerung d.
dichten Bereichs
für 10 mm
Abbildung 6.2: Vergleich der Spot-Diagramme aus der kommerziellen Software (links)
und dem selbstgeschriebenen Programm (rechts). Die Übereinstimmung
ist exakt.
6.3 Einschränkungen, Beugung
43
Abbildung 6.3: Verteilung der Ankunftszeiten, berechnet in der kommerziellen Software
(links) und dem C++-Programm (rechts). Auch hier findet man eine gute
Übereinstimmung.
6.3 Einschränkungen, Beugung
Raytracing kann nicht eingesetzt werden, falls die Wellennatur des Lichtes eine Rolle
spielt. Es muss daher untersucht werden, wann für ein Spiegelsystem Beugungseffekte
wichtig werden. Eine einfache Abschätzung der räumlichen Frequenz (eines Testmusters),
ab der die Auflösung durch Beugung begrenzt wird, erhält man aus der Größe des AiryScheibchens:
rAiry = 1,22 ·
f ·λ
D
(6.1)
(f : Brennweite, D: Durchmesser der Austrittspupille, λ: Wellenlänge). rAiry ist gerade
der Radius, bei dem die Intensitätsverteilung des Beugungsmusters ihr erstes Minimum
hat. Zwei Punkte können als getrennt aufgelöst werden, wenn das Maximum der Intensitätsverteilung des einen Punktes im Minimum der Intensitätsverteilung des zweiten liegt
(Rayleigh-Kriterium), wenn sie sich also gerade im Abstand rAiry befinden bzw. eine Orts1
frequenz von νmax = rAiry
haben. Für die Apertur des optischen Systems, welche durch
die sogenannte f-Zahl (oder fno ) beschrieben wird, gilt daher folgender Zusammenhang
mit der Beugungsgrenze:
fno ≡
rAiry
f
1
=
=
D
1,22 · λ
1,22 · λ · νmax
(6.2)
Der halbe Öffnungswinkel des Lichtkegels, θ, hängt mit der f-Zahl zusammen:
tan θ =
D/2
1
=
f
2 · fno
→
νmax =
2 tan θ
1,22 · λ
(6.3)
Oft wird für die f-Zahl auch eine abkürzende Schreibweise verwendet, dabei schreibt man
z.B. statt fno = 4 einfach f /4. Eine konservative Abschätzung für einen Öffnungswinkel
44
6 Numerische Untersuchung optischer Systeme
von 1° (siehe Abbildung 3.2 zu den auftretenden Cherenkov- und OTR-Winkeln) und
eine Wellenlänge von 700 nm ergibt eine Beugungsgrenze νmax ≈ 40mm−1 , also etwa
40 Linienpaaren pro mm (lp/mm). Dies ist noch immer besser als die Ortsauflösung der
Streak-Kamera von 25 lp/mm [Ham04]. Solange der volle Lichtkegel transportiert wird,
muss der Einfluss von Beugung also nicht berücksichtigt werden.
6.4 Modellierung von Cherenkov-Licht
Das optische System soll prinzipiell nicht auf die Anwendung mit einer speziellen Lichtquelle optimiert werden, muss aber auch bei Verwendung eines Cherenkov-Radiators funktionieren. Räumliche und zeitliche Auflösung, die für Cherenkov-Licht bereits durch die
Dicke des Radiator eingeschränkt werden, sollen in der Modellierung der Quelle keinesfalls
berücksichtigt werden (siehe Abschnitt 3.1.1 für die transversale Auflösung und [Bäh07]
für eine Abschätzung der zeitlichen Auflösung), die Kegelstruktur kann aber nicht außer
Acht gelassen werden. Da sich diese Abstrahl-Charakteristik eines Cherenkov-Radiators
erheblich von konventionellen Lichtquellen unterscheidet, gehört sie nicht zum Umfang der
kommerziellen Software und muss eigenhändig modelliert werden. Es wurden zunächst auf
rein geometrische Weise einzelne Punkte modelliert, die in einem eingeschränkten Winkelbereich abstrahlen. Dazu wurde die Systemapertur, auf welche alle von den Gegenstandspunkten ausgehenden Strahlen hinzielen, in großer Entfernung aufgestellt. Dadurch wird
der Einfluss der lateralen Position des Gegenstandspunktes minimiert, alle Lichtkegel verlaufen praktisch parallel (Abbildung 6.4 oben links und rechts). Durch das Einfügen von
kreisförmigen Hindernissen geeigneter Größe dicht hinter den einzelnen Gegenstandspunkten wurde dann der Innenteil der Kegel hinausgeschnitten (Abbildung 6.4 unten links).
Dieser Ansatz modelliert nur einzelne Punkte korrekt, für dazwischen liegende Punkte
oder einen ausgedehnten Gegenstand würde er aufgrund der künstlich eingeführten Hindernisse völlig falsche Ergebnisse liefern. Es wurde daher noch ein verbesserter Ansatz
gefunden, bei dem die kommerzielle Software um eine eigene, mit C erstellte Bibliothek
erweitert wurde. Diese erlaubt es, den Winkelbereich festzulegen, welcher eine Oberfläche
passieren kann. Die Systemapertur wird auch bei diesem Ansatz in großer Entfernung
platziert, die Hindernisse entfallen jedoch (Abbildung 6.4 unten rechts).
6.5 Design-Spezifikation und ihre numerische Untersuchung
Es müssen aussagekräftige numerische Kriterien gefunden werden, die das räumliche und
zeitliche Auflösungsvermögen und weitere Eigenschaften beschreiben. Die Ergebnisse der
Simulation des Linsensystems dienen soweit möglich zur Orientierung. Sofern nur Teilabschnitte des Spiegelsystems untersucht werden, müssen jene eine bessere Leistung erbringen als das Gesamtsystem.
6.5 Design-Spezifikation und ihre numerische Untersuchung
45
Abbildung 6.4: Modellierung von Cherenkov-Licht in der verwendeten Optiksoftware (Erläuterung siehe Text).
6.5.1 Räumliches Auflösungsvermögen
Die Linsensysteme zur Messung der Elektronenpaket-Länge erreichen in Simulationen eine Auflösung von 10–20 lp/mm, wobei die Verwendung der Farbfilter nicht berücksichtigt
ist. Die Werte unterscheiden sich für die verschiedenen Eingangsoptiken [Bäh07]. Es ist
zu beachten, dass sich die Angaben auf die Auflösung des (finalen) Bildes beziehen –
1
Zwischenbilder in einem um m größeren Abbildungsmaßstab erfordern eine um m
geringere Linienauflösung. Nach oben begrenzt wird die verwertbare Auflösung durch die
Streak-Kamera (25 lp/mm). Berücksichtigt man die Größe des Eingangsspalts (5 mm)
und die Apertur der reflektiven internen Optik der Streak-Kamera (f /4=7,13°),
ˆ
so kann
man hieraus Anforderungen an die im Hauptsystem zu transportierende Verteilungsgröße
und die dabei auftretenden Winkel bestimmen: Für eine gegebene laterale Verkleinerung
um den Faktor m zwischen Hauptsystem und Streak-Kamera ergibt sich
für die Zwi
1
schenbildgröße im Hauptsystem m · 5 mm, und für die Apertur arctan m
tan (7,13°) .
Die auftretenden Winkel sind von hoher Bedeutung, da sie den maximalen Spiegelabstand begrenzen. In Tabelle 6.1 sind drei ausgewählte Fälle dargestellt, die für alle Entwürfe zu untersuchen sind. Aus Platzgründen ist der maximale Spiegeldurchmesser auf
D = 150 mm begrenzt. Die angegebene Brennweite ist eine einfache Abschätzung für
einen Einzelspiegel mit diesem Durchmesser, in den meisten Entwürfen wird bei gleicher
Apertur eine geringere Brennweite gewählt, da sonst zu starke Lichtverluste auftreten.
Der Hauptteil des optischen Systems muss sowohl für Vollkonus als auch für Teilkonus
verwendbar sein, dies wird durch unterschiedliche Vergrößerungen in den Eingangsoptiken
erreicht.
Die Untersuchung der räumlichen Auflösung erfolgt durch numerische Bestimmung der
Modulationsübertragungsfunktion (MÜF), die ein Maß für den erreichbaren Kontrast abhängig von der Ortsfrequenz ist. Die Berechnung der MÜF ist Bestandteil der verwendeten
Optiksoftware (Abbildung 6.5). In einigen Situationen, z.B. bei nicht-radialsymmetrischen
Systemen oder bei Verwendung des „Cherenkov-Winkelfilters“, liefert die Berechnung
46
6 Numerische Untersuchung optischer Systeme
Fall
1
2
3
Verkleinerung
m = 10,0
m = 3,75
m = 2,08
Streak-Kamera
Apertur
(f-Zahl)
f/40,0
f/15,0
f/8,3
f/4,0
Öffnungswinkel
0,71°
1,91°
3,43°
7,13°
(Zwischen-)
Bildgröße
50,0 mm
18,8 mm
10,4 mm
5,0 mm
fs für
D = 150 mm
6000 mm
2250 mm
1250 mm
600 mm
Benötigte
Auflösung
>2,5 lp/mm
>6,7 lp/mm
>12 lp/mm
25 lp/mm
Tabelle 6.1: Verschiedene mögliche Anforderungen an das Hauptsystem, die als Grundlage für die weiteren Untersuchungen dienen. Die reflektive interne Optik
der Streak-Kamera ist zum Vergleich aufgeführt. Fall 1 hat etwa die gleiche
Verkleinerung zwischen Hauptsystem und Streak-Kamera wie das derzeitige System, Fall 2 und 3 entsprechen Linsentypen, die im derzeitigen System
vorhanden sind (A0-A6, siehe Abbildung 4.1).
falsche Ergebnisse. Diese Schwäche der Software wird umgangen, indem ebenfalls durch
Raytracing gewonnene Testbilder per Hand begutachtet werden, um die erreichbare Auflösung zu beurteilen (Abbildung 6.6). Die Beugungsgrenze wird von der Optiksoftware
automatisch in der MÜF berücksichtigt, auch wenn dies eigentlich nicht erforderlich wäre
(siehe Abschnitt 6.3). Für jedes System ist zu prüfen, ob die Verwendung von CherenkovLicht einen Einfluss auf die Abbildungsqualität hat (siehe Abschnitt 6.4). Im Vorfeld einer
Untersuchung der MÜF kann auch die numerische Bestimmung der Seidelkoeffizienten
hilfreich sein, um freie Systemparameter festzulegen.
6.5.2 Zeitliches Auflösungsvermögen
In Abschnitt 4.3.1 wurde das zeitliche Auflösungsvermögen eines Linsensystems simuliert. Das dort vorgestellte und in Abschnitt 6.2 überprüfte Verfahren eignet sich, den
Einfluss der geometrischen Weglängenunterschiede auf die Verteilung der Ankunftszeiten zu bestimmen. Für das zeitliche Auflösungsvermögen kann das Linsensystem offensichtlich nicht als Referenz dienen. Stattdessen gilt es, unterhalb der Zeitauflösung der
Streak-Kamera von 2 ps zu bleiben. Je besser die geometrische Zeitauflösung, desto mehr
Dispersion in Luft und Quarz kann akzeptiert werden. Der notwendige Filter kann dann
umso breitbandiger sein. Wie auch bei der räumlichen Auflösung ist der Einfluss der
Verwendung von Cherenkov-Licht zu untersuchen.
6.5.3 Minimierung von Lichtverlusten
Aufgrund von Absorption und Streuung entstehen an jeder Spiegelfläche Lichtverluste,
daher ist die Anzahl der benötigten Elemente gering zu halten. Zusätzlich sind hochreflektive Beschichtungen und geringe Rauigkeiten zu bevorzugen. In Spiegelsystemen tritt
häufig eine gegenseitige Verdeckung der Spiegel auf, die zu einem erheblichen Lichtverlust
führt. Dieser geometrische bedingte Lichtverlust ist Teil der numerischen Untersuchung.
Neben insgesamt geringen Lichtverlusten ist vor allem das Verhältnis der Verluste für
6.5 Design-Spezifikation und ihre numerische Untersuchung
Abbildung 6.5
Modulationsübertragungsfunktion von HIGH1.Scr2. Es
wurde das leicht geänderte System für 2008 zugrunde gelegt. Ein Kontrast oberhalb von 0,1 gilt als auflösbar, die
erreichte Auflösung beträgt hier 18 lp/mm. Nur das erste Minimum hat Bedeutung, der anschließende Kurvenanstieg ist vermutlich numerisch bedingt. Die blauen Linien
beschreiben den Kontrast für einen Punkt auf der optischen
Achse, die roten Linien gelten für einen Punkt 1 mm seitlich. Es gibt jeweils zwei Linien, die den Unterschied zwischen einem in x-Richtung und einem in y-Richtung ausgedehnten Gegenstand verdeutlichen - zur Abschätzung wird
jeweils die untere Linie verwendet.
47
Abbildung 6.6
Beispiel
einer
geometrischen
Bilduntersuchung.
Wenn
die
Berechnung der Modulationsübertragungsfunktion fehlschlägt,
kann durch solche Bilder ein
Eindruck der Abbildungsqualität
gewonnen werden: Die Gesamtverteilung ist 1 mm hoch und
breit. Die Muster mit 10 lp/mm
können gut aufgelöst werden, die
Muster mit 20 lp/mm sind dicht
an der Auflösungsgrenze.
einen Gegenstandspunkt auf der optischen Achse und am Bildrand wichtig, da von allen Punkten der Verteilung etwa gleich viel Licht eingesammelt und transportiert werden
soll. Das System darf daher nur minimale Vignettierungen (Begrenzungen der Aperturen,
die nicht alle Gegenstandspunkte gleichermaßen betreffen) aufweisen. Es ist zu prüfen,
inwieweit dies auch für Cherenkov-Licht funktioniert.
Die Optiksoftware kann für eine gegebene Verteilung die (geometrische) Transmission des
Systems bestimmen. Dabei wird angenommen, dass jeder Punkt der Verteilung gleichförmig abstrahlt (gleiche Energiemenge pro Raumwinkel). Auch kann die relative Lichtintensität berechnet werden, welche das Verhältnis der Transmission für einen beliebigen
Gegenstandspunkt zu einem Gegenstandspunkt auf der optischen Achse angibt.
6.5.4 Längeneffizienz
Die kompliziertere Geometrie von Spiegelsystemen führt zwangsläufig zu längeren Lichtwegen als in einem vergleichbaren Linsensystem. Dadurch wird vor allem die Auswirkung
der Dispersion in Luft verstärkt (siehe Abschnitt 4.6). Zur Beschreibung der Abweichung
48
6 Numerische Untersuchung optischer Systeme
von einem ideal geradlinig verlaufenden System dient die Längeneffizienz LE:
LE =
Abstand von Gegenstand zu Bild
Mittlere optische Weglänge
(6.4)
Bei der Berechnung der Längeneffizienz wird immer ein abbildendes System zugrunde
gelegt. Für Teleskope, die paralleles Licht fokussieren, bedeutet dies, dass zwei entgegengesetzt ausgerichtete Teleskope im 4f-Schema verwendet werden. Meistens genügt es,
zur Bestimmung des Nenners die (Beträge der) Abstände von Spiegel zu Spiegel entlang
der optischen Achse aufzusummieren. Für Systeme, deren Eintrittspupille sich nicht auf
der optischen Achse befindet, führt dies jedoch nicht zum richtigen Ergebnis, daher die
etwas aufwändigere Definition. Für Linsensysteme ergibt sich typischerweise LE ≈ 0,99,
da die optische Weglänge in den Linsen die geometrische Weglänge übersteigt. Für Spiegelsysteme ist ein solch hoher Wert nicht möglich. Häufig können Planspiegel helfen, die
Längeneffizienz zu verbessern. Planspiegel, die nur zur Strahlführung durch das Gebäude
erforderlich sind, werden in diesem Stadium der Untersuchung nicht berücksichtigt.
6.5.5 Machbarkeit
Die simulierten Systeme weichen in verschiedenen Punkten von tatsächlichen optischen
Systemen ab. Die Spiegel können nur mit einer endlichen Genauigkeit gefertigt werden,
die Oberflächenform hat zufällige Abweichungen (Rauigkeit) und systematische Abweichungen, von welchen ein ausgedehnter Bereich betroffen ist. Die Spiegel können nur mit
endlicher Genauigkeit in Position gebracht und ausgerichtet werden. Die Justierung mit
einem Laser ist erheblich schwieriger als bei einem Linsensystem. Diese Ungenauigkeiten
werden in Toleranz-Rechnungen durch numerische Simulationen nachempfunden. Da solche Rechnungen zeitaufwändig sind, wird dieser Schritt zuletzt durchgeführt, und nur,
wenn das System in den übrigen Kriterien geeignet erscheint.
7 Abbildung mit klassischen Spiegelteleskopen
Es werden Spiegelsysteme untersucht, die sich zum Transport über lange Distanzen eignen, also den Hauptteil des reflektiven optischen Systems darstellen können, vergleichbar
mit den Linsen A1-A6 im derzeitigen optischen System (siehe Abbildung 4.1). Es kommen
ausschließlich Systeme mit einem Abbildungsmaßstab m=1 in Betracht, da diese bei gleichem Aufwand grundsätzlich bessere Abbildungsqualität erreichen (siehe Abschnitt 5.3).
Es werden die in Tabelle 6.1 angegebenen Fälle untersucht.
Einige Beispiele aus [Kor91] wurden ausgewählt und als Grundlage für eigene Systeme
verwendet. Diese sollen im Folgenden vorgestellt und untersucht werden. Bei der Auswahl
wurde darauf geachtet, dass die Systeme mit möglichst wenig Spiegeln auskommen und
eine gute Längeneffizienz ermöglichen. Es werden zunächst klassische Spiegelteleskope untersucht: Das Cassegrain-Teleskop (Abschnitt 7.1), das Gregory-Teleskop (Abschnitt 7.2)
und das Schwarzschild-Teleskop (Abschnitt 7.3). Letzteres wurde trotz geringer Längeneffizienz in die Untersuchung aufgenommen, da es frei von allen Seidel-Aberrationen außer
Verzeichnung ist.
7.1 Cassegrain-Teleskop
Idee
Das Cassegrain-Teleskop besteht aus einem Parabolspiegel und einem hyperbolischen
Spiegel (Abbildung 7.1) und ist auf der optischen Achse streng stigmatisch, also frei
von sphärischer Aberration in allen Ordnungen, da die Bedingungen für Krümmungsradius r und konische Konstante δ in Gl. (5.14) von beiden Spiegeln exakt erfüllt werden.
Das Cassegrain-Teleskop ist ein fokussierendes Teleskop, es bildet paralleles Licht in seinem Brennpunkt ab. Verwendet man zwei entgegengesetzt ausgerichtete Teleskope, ist
damit eine Punkt-zu-Punkt Abbildung im Maßstab m = 1 möglich. Dies ist eine SpiegelEntsprechung des 4f-Schemas (siehe Abbildung 4.2).
Von den Parametern erster Ordnung können die Krümmungsradien r1 und r2 der beiden
Spiegel, sowie der Abstand d zwischen den Spiegeln frei gewählt werden.
49
50
7 Abbildung mit klassischen Spiegelteleskopen
Abbildung 7.1: Das Cassegrain-Teleskop, bestehend aus parabolischem Primärspiegel
(rechts) und hyperbolischem Sekundärspiegel.
Mit den Bedingungen aus Gl. (5.14) lassen sich dann alle weiteren Größen bestimmen:
Primärspiegel
Gegenstands-/Bildweite
Krümmungsradius, konische Konstante
Sekundärspiegel
Gegenstands-/Bildweite
Krümmungsradius, konische Konstante
Systembrennweite
g1 = ∞
b1 =
r1 > 0
δ1 = −1
g2 =
r1
2
−d>0
r2 > r1 − 2d
fs = − b1g2b2 =
b2 =
δ2 =
r1
2
r2 r1 −2d
2 r1 −r2 −2d
r22
b2 g2 − 1 <
<0
−1
r1 r2
2·(r2 −r1 +2d )
Die Systembrennweite fs ist diejenige Brennweite, die eine dünne Einzellinse haben müsste, um die Spiegelanordnung zu ersetzen. Die Bedingung an r2 ergibt sich aus fs > 0,
also der Forderung nach einem reellen Bild, oder auch aus δ2 < −1, also der Forderung,
dass der Sekundärspiegel Hyperbelform hat. Mit zunehmendem fs werden die Aberrationen geringer, was anschaulich daher kommt, dass die auftretenden Winkel kleiner werden
und die idealen (Gaußschen) Gleichungen besser erfüllt sind. Insbesondere ist der KomaKoeffizient proportional zu fs−2 ([Kor91], S. 164).
Für die Längeneffizienz (im 4f-Schema) ist ein hoher Wert von fs bzw. ein kleiner Wert
von |d|/fs günstig:
LE ≈
|d|/fs
4fs
=1−
4fs + 4|d|
1 + |d|/fs
(7.1)
7.1 Cassegrain-Teleskop
51
Der Term 4|d| (mit d < 0, da sich der Sekundärspiegel vor dem Primärspiegel befindet)
beschreibt das Hin- und Herlaufen in beiden Teleskopen. Die Gesamtlänge des Systems
wurde zu 4fs abgeschätzt, dies ist nur näherungsweise richtig und hängt vom Abstand der
beiden Teleskope ab. Der Abstand l von Primärspiegel zu Primärspiegel beeinflusst vor allem die Winkelvergrößerung des Gesamtsystems. Die Winkelvergrößerung beschreibt, wie
sich durch das optische System der Winkel ändert, unter dem ein Gegenstandspunkt seitlich der optischen Achse einem Beobachter erscheint. Bei der numerischen Untersuchung
wird dieses Problem näher erläutert und der korrekte Wert für l bestimmt.
Die gegenseitige Verdeckung der Spiegel führt an der Rückseite des Sekundärspiegels zu
Lichtverlusten. Die Größe des Sekundärspiegels kann aus der Brennweite des Primärspiegels, f1 , und dem Spiegelabstand d abgeschätzt werden zu D2 ≈ D1 · (f1 − |d|) /f1 .
Der relative Lichtverlust an der Rückseite des Sekundärspiegels ist für einen isotrop ab
2
2
2
strahlenden Gegenstandspunkt auf der optischen Achse dann D
≈ r1r+2d
. Diese
D1
1
Abschätzung kann nützlich sein, um den Spiegelabstand grob festzulegen, seitlich der
optischen Achse gilt sie aber nicht. Der Lichtverlust wird daher numerisch untersucht.
Die drei genannten Anforderungen, gute Auflösung und Längeneffizienz bei geringen
Lichtverlusten zu erreichen, sind nicht unabhängig. Zum einen genügen sie daher nicht, um
r1 , r2 und d bestimmen, zum anderen muss man zwischen verschiedenen Optimierungen
abwägen. Legt man die Systembrennweite anhand Tabelle 6.1 fest, verbleiben noch zwei
Parameter erster Ordnung zur Optimierung. Dieses Problem wird mit in die numerische
Untersuchung aufgenommen.
Festlegung der freien Parameter durch Simulationen
Die Überlegungen, die in die Wahl der freien Parameter einfließen, sollen am Beispiel des
Cassegrain-Teleskops ausführlich besprochen werden. Ein 4f-Schema aus zwei CassegrainTeleskopen wird in der Optiksoftware aufgebaut. Das erste Teleskop ist dabei im Vergleich
zum vorherigen Abschnitt umgekehrt ausgerichtet (Abbildung 7.2), trotzdem wird der Parabolspiegel weiter als Primärspiegel bezeichnet. Im Vergleich zum Einzelteleskop kommt
noch ein weiterer Parameter hinzu, der Abstand l der beiden Primärspiegel, welcher vor
allem die Winkelvergrößerung des Systems festlegt.
Abbildung 7.2: Eine 4f-Anordnung aus zwei Cassegrain-Teleskopen.
52
7 Abbildung mit klassischen Spiegelteleskopen
Eine Winkelvergrößerung 6= 1 macht sich erst bei einer Verkettung von Systemen deutlich bemerkbar, man unterschätzt ihre Bedeutung daher leicht (Abbildung 7.3). Um den
korrekten Abstand l analytisch zu ermitteln, müsste man die Lage von Eintritts- und
Austrittspupille des Systems bestimmen, da die Winkelvergrößerung gerade umgekehrt
proportional zur Pupillenvergrößerung ist ([Kor91], S. 96). Für die numerische Untersuchung ist dies nicht erforderlich, der Abstand kann iterativ so angepasst werden, dass die
Winkelvergrößerung 1 beträgt. Mit jeder Änderung der übrigen Parameter ändert sich
auch der korrekte Abstand, so dass er stets neu bestimmt werden muss. Ein Übergang
zum Modell für Cherenkov-Licht erfordert jedoch keine Anpassung.
Abbildung 7.3: Verkettung von fünf gleichen 4f-Anordnungen mit einer Winkelvergrößerung 6= 1. Die Strahlenbündel verlaufen immer weiter außen, die benötigten Spiegeldurchmesser vergrößern sich.
7.1 Cassegrain-Teleskop
53
Als Ausgangspunkt für die weitere Untersuchung wird Fall 2 aus Tabelle 6.1 ausgewählt,
zunächst mit einem Spiegelabstand d, der der halben Brennweite des Primärspiegels entspricht. Die Systembrennweite fs wird gegenüber der Tabellenangabe reduziert. Das erste
Teleskop wird dann nicht voll ausgeleuchtet, und am Rand des zweiten Teleskops geht
weniger Licht verloren. Es zeigt sich, dass die beste Wahl für fs vom Krümmungsradius
des Primärspiegels abhängt. Dieser ist bisher nicht festgelegt. Abbildung 7.4 zeigt, welcher Wert sich für fs abhängig von r1 aus der numerischen Untersuchung ergibt, wenn
kein Licht am Spiegelrand verloren gehen soll. Die Längeneffizienz, welche ebenfalls in
Abbildung 7.4 gezeigt ist, fällt mit zunehmendem Krümmungsradius r1 . Die Abnahme
der Längeneffizienz rührt zum Teil daher, dass der Spiegelabstand gemäß d = f21 = r41
ebenfalls variiert wurde, um bessere Vergleichbarkeit zu haben. Aber auch für konstanten
Spiegelabstand nimmt die Längeneffizienz mit zunehmendem r1 ab.
Abbildung 7.4: Änderung von Systembrennweite und Längeneffizienz durch Wahl des
Primärspiegel-Krümmungsradius r1 . Die Systembrennweite wird jeweils so
bestimmt, dass kein Licht am Rand des zweiten Primärspiegels verloren
geht. Um eine Winkelvergrößerung von 1 zu erreichen, wird der Abstand l
der Teleskope angepasst. Die Sprünge im Verlauf der Systembrennweite
sind numerisch bedingt.
r1 kann nicht beliebig klein gewählt werden. Hauptgrund ist die dann verstärkt auftretende Koma, zusätzlich wird die Auswirkung von Justierfehlern durch eine hohe Spiegelkrümmung verstärkt. Dies zeigen die folgenden Untersuchungen: Die Parameter r1 , l und
fs werden wie zuvor variiert bzw. anhand obiger Überlegungen angepasst, und durch Untersuchung der MÜF jeweils die Auflösung am Bildrand bestimmt1 . Dann wird der erste
Primärspiegel um ein halbes Grad verkippt und die Auflösung erneut bestimmt. Das Ergebnis ist in Abbildung 7.5 zu sehen. Wenn der Krümmungsradius des Primärspiegels, r1 ,
1
Bildrand: Gegenstandspunkt, der um die halbe Bildgröße
von der optischen Achse entfernt ist. Für
√
eine quadratische Verteilung wäre dieser Wert um 2 zu klein – es wurde aber berücksichtigt, dass
der Eingangsspalt der Streak-Kamera nur einen schmalen Streifen aufnehmen kann.
54
7 Abbildung mit klassischen Spiegelteleskopen
zu klein gewählt wird, begrenzt er die erreichbare Auflösung und macht das System anfälliger bei Justierungenauigkeiten. Durch die Verkippung wird nicht das gesamte Licht vom
zweiten Teleskop aufgefangen, daher ist auch die relative Lichtintensität für einen Punkt
am Bildrand dargestellt. Die Verkippung ist mit 0,5° für einen einzelnen Spiegel sehr hoch
Abbildung 7.5: Auflösung und relative Lichtintensität am Spiegelrand. Die Auflösung
wurde berechnet, ohne Lichtverluste durch die gegenseitige Verdeckung
der Spiegel zu berücksichtigen.
abgeschätzt, sämtliche übrige Fehlerquellen wurden aber vernachlässigt. Der Kurvenverlauf darf daher nur als Hinweis dienen, das Maximum bei r1 = 2100 mm hat keine besondere Bedeutung. Nimmt man die Überlegungen zu Längeneffizienz, Auflösungsvermögen
und Justiereigenschaften zusammen, so scheinen r1 = 1000 mm oder r1 = 1500 mm geeignete Kompromisse zu sein. Die weitere Untersuchung zeigte, dass die erreichte Auflösung
für r1 = 1500 mm nur wenig besser ist als für r1 = 1000 mm und wurde daher aufgrund der
niedrigeren Längeneffizienz nicht weiter untersucht. Die Systembrennweite wird anhand
von Abbildung 7.4 auf fs = 1230 mm festgelegt. Abschließend soll nun der Spiegelabstand d zwischen Primärspiegel und Sekundärspiegel festgelegt und der Durchmesser des
Sekundärspiegels im zweiten Teleskop, D2,2 , bestimmt werden. Hauptsächlich beeinflussen d und D2,2 die Lichtverluste durch gegenseitige Verdeckung der Spiegel, d ändert aber
auch die Längeneffizienz des Systems. Es wurden im Parameterbereich von d = 0,6f1 bis
0,7f1 und D2,2 = 45 mm bis 55 mm mehrere geeignete Lösungen gefunden. Daraus wurde
per Hand eine Lösung ausgewählt: Das System mit fs = 1230 mm, d = 0,68f1 = 340 mm
und D2,2 = 50 mm erreicht 62,8% Transmission für einen Punkt auf der optischen Achse
und hat am Rand noch 86% relative Lichtintensität. Die vollständige Spezifikation ist in
Tabelle 7.1 zu finden. Fall 1 und Fall 3 werden analog zu Fall 2 untersucht, für Fall 1 zeigt
sich jedoch, dass es nicht möglich ist, die Parameter so zu wählen, dass der zweite Primärspiegel das gesamte Licht auch vom Rand der Verteilung auffängt. Die Ursache hierfür
liegt im Verhältnis der Größe der abzubildenden Verteilung (50 mm) zum maximalen
Spiegeldurchmesser (150 mm). Fall 1 ist daher in der Tabelle nicht aufgeführt.
7.1 Cassegrain-Teleskop
55
Simulation der Systemleistung
Die Systemleistung wird wie in Abschnitt 6.5 beschrieben untersucht. Räumliche und zeitliche Auflösung, geometriebedingte Lichtverluste und Längeneffizienz werden bestimmt.
Auch der Einfluss der Verwendung von Cherenkov-Licht wird untersucht, dabei wird der
Kegelwinkel ϑ entsprechend der Apertur des Systems festgelegt. Statt der gewöhnlichen
geometrischen Bildanalyse wurde die sogenannte “Diffraction Image Analysis”-Funktion
der Optiksoftware benutzt, die auch den Einfluss von Beugung abschätzt. Dies ist erforderlich, da insbesondere bei Cherenkov-Licht die ausgeleuchtete Spiegelfläche sehr klein
werden kann, wodurch Beugungseffekte an Bedeutung gewinnen. Durch Streuung im Aerogel und die Impulsbreite der Eingangsverteilung ist der Cherenkov-Winkel nicht scharf
festgelegt, auch in der Simulation wird ein endlicher Winkelbereich verwendet. Die Ergebnisse sind in Tabelle 7.1 aufgeführt. Die erreichten räumlichen und zeitlichen Auflösungen
übertreffen die Anforderungen deutlich und haben dabei eine akzeptable Längeneffizienz
von rund 80%. Bei Fall 2 treten stärkere Lichtverluste auf als bei Fall 3, wieder ist hier
die Größe der abzubildenden Verteilung als Erklärung zu nennen. Für Cherenkov-Licht
mit dem angegebenen Winkelbereich tritt praktisch kein Lichtverlust auf. Die berechneten Zeitauflösungen können tatsächlich nicht erreicht werden, da sie die Unschärferelation
verletzen: Aus E · ∆t > h folgt mit E = hν, dass ∆t > λc ≈ 2 fs für die Messung der
Ankunftzeit eines Photons im sichtbaren Wellenlängenbereich.
Für Fall 2 sind in Abbildung 7.6 einige der Ergebnisse anhand von MÜF, geometrischer
Bildanalyse, relativer Lichtintensität und der Verteilung der relativen Ankunftzeiten veranschaulicht. Desweiteren wurde eine Verkettung von Systemen untersucht, um zu prüfen, ob auch in den folgenden Teleskopen Lichtverluste auftreten, und wie sehr sich die
Auflösung verringert (Tabelle 7.2). Auch eine Verkettung von Systemen genügt den Anforderungen, jedoch verschlechtert sich die Auflösung am Bildrand durch die Aufsummierung
der verschiedenen Aberrationen deutlich. In der Bildmitte hingegen wird die Auflösung
durch Beugung begrenzt und bleibt erhalten. Die Lichtverluste nehmen nicht weiter zu.
Das Cassegrain-Teleskop hat ein grundlegendes Problem: Es akzeptiert aufgrund seiner
Geometrie keine Strahlen unterhalb eines bestimmten Öffnungswinkels. Für CherenkovLicht würde unterhalb einer bestimmten Energie kein Licht mehr durch das optische
System gelangen, für OTR gibt es entsprechend eine obere Energiegrenze (vergleiche Abbildung 3.2). Daher ist das Cassegrain-Teleskop trotz guter räumlicher und zeitlicher
Auflösung für das Hauptsystem ungeeignet. Es kann aber für den Entwurf einer Eingangsoptik im Teilkonus-Schema in Betracht kommen, da das Licht dort beinahe parallel
(±1°) ins optische System eintritt.
56
Cassegrain-Teleskope
Ausleuchtung
Bildgröße
Benötigte Auflösung
Öffnungswinkel
7 Abbildung mit klassischen Spiegelteleskopen
Fall 2
Vollständig
Cherenkov
18,8 mm
>6,67 lp/mm
1,91°
1,72°−1,91°
Geometrie
Systembrennweite fs
1230 mm
Krümmungsradius r1
1000,00 mm
Krümmungsradius r2
539,18 mm
Konische Konstante δ1
-1,00
Konische Konstante δ2
-5,62
Primär ↔ Sekundär d
340,0 mm
Primär1 ↔ Primär2 l
5563 mm
∅ Primärspiegel (Teleskop 1)
100 mm
∅ Primärspiegel (Teleskop 2)
150 mm
∅ Sekundärspiegel (T1)
26,3 mm
∅ Sekundärspiegel (T2)
50,0 mm
∅ Primärspiegelöffnung (T1)
25 mm
∅ Primärspiegelöffnung (T2)
36 mm
Gesamtlänge
5670 mm
Auf lösungsvermögen
Räumliche Auflösung
Bildmitte [lp/mm]
104
∼100
Bildrand [lp/mm]
59
∼ 10
Ankunftszeiten-Verteilung
normiert mit Gesamtlänge
FWHM [fs/m]
0,0090
0,0071
statistische Unsicherheit
±0,0006
±0,0004
Breite oberhalb 1% [fs/m]
0,1201
0,0472
statistische Unsicherheit
±0,0035
±0,0029
Effizienz
Winkelakzeptanz
1,16°−1,91°
Spiegel pro Länge [m−1 ]
0,71
Längeneffizienz
80,7%
Lichtverlust durch Geometrie
Bildmitte
0,3715
0,0014
statistische Unsicherheit
±0,0007
±0,0031
Bildrand
0,4719
0,0019
statistische Unsicherheit
±0,0008
±0,0044
Fall 3
Vollständig
Cherenkov
10,4 mm
>12,0 lp/mm
3,43°
3,09°−3,43°
925 mm
650,00 mm
325,68 mm
-1,00
-4,34
219,4 mm
2171 mm
120 mm
150 mm
36,2 mm
56,0 mm
28 mm
32 mm
4505 mm
182
134
∼50
∼30
0,0505
±0,0016
0,1899
±0,0043
0,0908
±0,0015
0,1630
±0,0021
1,58°-3,43°
0,89
83,7%
0,2121
±0,0004
0,3256
±0,0006
0,0014
±0,0046
0,0000
±0,0032
Tabelle 7.1: Spezifikation und Leistung der optimierten Cassegrain-Teleskope. Als statistische Unsicherheiten sind die Standardabweichungen für Simulationen von
typischerweise 105 − 106 Strahlen angegeben.
7.1 Cassegrain-Teleskop
57
Modulationsübertragungsfunktion
Relative Lichtintensität
(Maximum normiert auf 1)
Verteilung der Ankunftszeiten
Geometrische Bilduntersuchung
mit einer Halbwertsbreite von 0,05 fs.
0,25 mm×0,25 mm Gegenstand, dessen
Zentrum (×) sich am Rand der abzubildenden
Verteilung befindet. 80 lp/mm werden nur in
einer Richtung gut aufgelöst (vergleiche MÜF).
Abbildung 7.6: Diagramme zur Leistung der optimierten Cassegrain-Teleskope (Fall 2).
58
Cassegrain-Teleskope
Anzahl 4f-Anordnungen
Gesamtlänge
Winkelakzeptanz
Räumliche Auflösung
Bildmitte [lp/mm]
Bildrand [lp/mm]
Zeitliche Auflösung
FWHM [fs/m]
Breite >1% [fs/m]
Lichtverlust (Geometrie)
Bildmitte
Bildrand
7 Abbildung mit klassischen Spiegelteleskopen
Fall 2
1
5
5,67 m
28,35 m
1,16°−1,91° 1,16°−1,91°
Fall 3
1
6
4,51 m
27,03 m
1,58°-3,43°
1,58°-3,43°
104
59
104
18
182
134
182
28
0,009±0,001
0,120±0,004
0,030±0,001
0,417±0,015
0,051±0,002
0,190±0,004
0,047±0,001
0,186±0,009
0,372±0,001
0,472±0,001
0,371±0,002
0,476±0,001
0,212±0,001
0,326±0,001
0,212±0,001
0,329±0,001
Tabelle 7.2: Leistung bei einer Verkettung von 4f-Anordnungen aus CassegrainTeleskopen. Die räumliche Auflösung am Bildrand und die zeitliche
Auflösung verschlechtern sich, die Lichtverluste nehmen jedoch nicht weiter
zu. Bei Fall 3 wurden 6 4f-Anordnungen aneinander gereiht, um eine ähnliche
Gesamtlänge wie bei Fall 2 zu erreichen. Die Ergebnisse genügen den Anforderungen.
7.2 Gregory-Teleskop
59
7.2 Gregory-Teleskop
Das Problem der gegenseitigen Verdeckung der Spiegel kann beim Cassegrain-Teleskop nur
durch Anpassung von Position und Durchmesser des Sekundärspiegels behandelt werden.
Die Begrenzung für zu geringe Winkel lässt sich nicht vermeiden. Dies liegt anschaulich
daran, dass die Strahlen innerhalb des Teleskops nicht die optische Achse kreuzen (siehe
Abbildung 7.1). Entfernt man also ein Segment des Sekundärspiegels, um dort an der
Rückseite kein Licht zu verlieren, so fehlt eben dieses Segment im weiteren Strahlverlauf.
Dieses Problem tritt beim Gregory-Teleskop nicht auf, da dieses so gestaltet ist, dass es ein
reelles Zwischenbild gibt (Abbildung 7.7). Der zweite Spiegel hat die Form eines prolaten
Ellipsoids (−1 < δ2 < 0). Verwendet man nur jeweils einen halben Spiegel, so gibt es keine
Begrenzung für kleine Winkel (Abbildung 7.8). Diese Geometrie führt zu wenigstens 50%
Lichtverlust, bei der Verkettung von 4f-Anordnungen muss auf die korrekte Ausrichtung
der Spiegelsegmente geachtet werden.
Die Krümmungsradien und Abstände werden anhand ähnlicher Überlegungen wie beim
Cassegrain-Teleskop optimiert: Die Abstände der Teleskope werden so bestimmt, dass sich
eine Winkelvergrößerung von 1 ergibt. Die Systembrennweite wird verringert, damit das
zweite Teleskop alles Licht auffangen kann. Es muss b2 > g2 + |b1 | gelten, damit das finale
Bild nicht innerhalb des Teleskops entsteht. Nimmt man diese Anforderungen zusammen,
so lassen sich für Fall 3 nur Systeme mit wenigstens etwa 2 Spiegeln pro Meter finden.
Aufgrund der damit verbundenen Lichtverluste wird dieser Fall für das Gregory-Teleskop
nicht weiter untersucht. Für Fall 2 benötigt man im günstigsten Fall etwa 1 Spiegel pro
Meter, für Fall 1 gibt es Lösungen in einem ausgedehnten Parameterbereich, die weniger
als 1 Spiegel pro Meter benötigen. Die Auflösung am Bildrand verbessert sich für größeren
Krümmungsradius r1 und Spiegelabstand d, jedoch sinkt dabei die Längeneffizienz. Für
eine gute Längeneffizienz und geringe Lichtverluste sollte der Sekundärspiegel dicht am
Zwischenfokus stehen, für zu kleine Abstände wird das System jedoch empfindlich gegen
Justierfehler. Es werden Halbspiegel verwendet (siehe Abbildung 7.8), bei den Primärspiegeln wird darüberhinaus ein (halb-)kreisförmiger Teil im Zentrum entfernt, da hier
sonst hohe Lichtverluste entstehen. Dadurch wird die Winkelakzeptanz für kleine Winkel beschränkt, obwohl dies eigentlich durch die Verwendung von Halbspiegeln vermieden
werden sollte. Die Ergebnisse für Fall 1 und Fall 2 sind in Tabelle 7.3 gezeigt. Auch das
Gregory-Teleskop übertrifft die Anforderungen an die räumliche Auflösung und hat dabei
eine akzeptable Längeneffizienz. Zur Abbildung mit Cherenkov-Licht eignet sich nur das
für Fall 3 entworfene System, da für Fall 2 nicht die gesamte Verteilung abgebildet wird.
Aufgrund der hohen Weglängenunterschiede zwischen Strahlen, die das System am Rand
oder mittig durchlaufen, wird keine ausreichende zeitliche Auflösung erreicht (< 2 ps auf
30 m sind erforderlich). Das Gregory-Teleskop ist daher nicht für das optische Transportsystem geeignet.
60
Gregory-Teleskope
Ausleuchtung
Bildgröße
Benötigte Auflösung
Öffnungswinkel
Systembrennweite fs
Krümmungsradius r1
Krümmungsradius r2
Konische Konstante δ1
Konische Konstante δ2
Primär ↔ Sekundär d
Primär1 ↔ Primär2 l
∅ Primärspiegel
∅ Sekundärspiegel
∅ Primärspiegelöffnungen
Gesamtlänge
Räumliche Auflösung
Bildmitte [lp/mm]
Bildrand [lp/mm]
Ankunftszeiten-Verteilung
normiert mit Gesamtlänge
FWHM [fs/m]
Breite oberhalb 1% [fs/m]
Winkelakzeptanz
Spiegel pro Länge [m−1 ]
Längeneffizienz
Lichtverlust durch Geometrie
Bildmitte
statistische Unsicherheit
Bildrand
statistische Unsicherheit
7 Abbildung mit klassischen Spiegelteleskopen
Fall 1
Vollständig
Cherenkov
50,0 mm
>2,5 lp/mm
0,71°
0,64°−0,71°
Geometrie
5400 mm
800,0 mm
275,6 mm
-1,000
-0,743
548,0 mm
2962 mm
150 mm
50 mm
10 mm
5862 mm
Auf lösungsvermögen
36
9
Fall 2
Vollständig
Cherenkov
18,8 mm
>6,67 lp/mm
1,91°
1,72°−1,91°
2250 mm
1000,00 mm
302,7 mm
-1,000
-0,405
685,0 mm
3703 mm
150 mm
75 mm
30 mm
3998 mm
∼8
-
98
33
∼20
∼5
200±4
709±200
348±3
2021±21
Effizienz
0,14°-0,71°
0,68
72,8%
97,2±4,7
173±2
88,8±0,2
173±2
0,521
±0,001
0,573
±0,001
0,501
±0,006
1,000
0
0,38°-1,91°
1,00
59,3%
0,520
±0,001
0,606
±0,002
0,499
±0,004
0,716
±0,009
Tabelle 7.3: Spezifikation und Leistung der Gregory-Teleskope. Die Ergebnisse weichen
zwischen den verschiedenen Bildrändern ab, es wurde jeweils der ungünstigste
Wert in die Tabelle aufgenommen.
7.3 Schwarzschild-Teleskop
Abbildung 7.7
Schema eines Gregory-Teleskops.
61
Abbildung 7.8
Gregory-Teleskop mit Halbspiegeln. Das Licht
kann auch dicht an der optischen Achse durch
das System laufen. Es werden jedoch wenigstens
50% Lichtverlust in Kauf genommen.
7.3 Schwarzschild-Teleskop
Das Schwarzschild-Teleskop (Abbildung 7.9) erreicht mit zwei oblaten Ellipsoidspiegeln
eine Abbildung, die in 3. Ordnung frei von sphärischer Aberration, Koma, Astigmatismus
und Feldkrümmung ist. Nach Anbringung dieser Korrekturen gibt es nur noch einen einzigen freien Parameter, eine Längenskala. Wählt man als solchen die Systembrennweite
fs , so ergeben sich folgende relative Parameter ([Kor91], S. 169):
√
Primärspiegel
Gegenstands-/Bildweite g1 = −∞
b1 = 2fs
√ 2
√
δ1 = 1 + 2
Krümmungsradius, konische Konstante r1 = −2 2fs
√ √ Sekundärspiegel Gegenstands-/Bildweite g2 = 2 + 2 fs
b2 = 1 + 2 fs
√
√ −2
Krümmungsradius, konische Konstante r2 = −2 2fs = r1 δ2 = 1 + 2
Spiegelabstand
d = −2fs
Eine Winkelvergrößerung von 1 im 4f-Schema ist nicht möglich, da die Systembrennweite
geringer ist als der Spiegelabstand d, die beiden Teleskope müssten sich also durchdringen.
Das System wurde so aufgebaut, dass sich die Teleskope an der Rückseite der Sekundärspiegel berühren, wodurch die Winkelvergrößerung minimiert wird. Eine Verkettung von
Schwarzschild-Teleskopen ist jedoch ausgeschlossen. Die Längeneffizienz ist hiermit vollständig festgelegt:
√
b2
1+ 2
√
LE =
=
≈ 37,6%
(7.2)
b2 + 2|d|
1+ 2+4
62
7 Abbildung mit klassischen Spiegelteleskopen
Abbildung 7.9: Aufbau des Schwarzschild-Teleskops.
Die Angaben in Tabelle 6.1 legen für den parallelen Lichttransport einen Strahldurchmesser von 150 mm zugrunde. Beim Schwarzschild-Teleskop ist der Durchmesser des parallelen Lichtbündels jedoch kleiner, da der Primärspiegel
kleiner als der Sekundärspiegel
√
ist. Das Verhältnis der Durchmesser ist 1 + 2, und die Systembrennweiten sollten um
diesen Faktor kleiner gewählt werden. Die Größen der Spiegelöffnungen werden variiert,
um eine hohe Lichtintensität am Rand zu erreichen. Die Untersuchungen zeigen, dass sich
keiner der drei Fälle verwirklichen lässt. Am besten sind die Ergebnisse für Fall 3, aber
auch nach der Optimierung betragen die Lichtverluste über 80%. Insbesondere wird der
Lichtkegel nicht vollständig aufgefangen, die verwendbare Apertur ist viel geringer als
gefordert. Auf der optischen Achse ist eine sehr hohe Auflösung möglich, diese bricht aber
wie die Lichtintensität zum Rand hin schnell ein. Die Leistung des optimierten Systems
ist in Tabelle 7.4 aufgeführt. Die Form der Sekundärspiegel ist beinahe sphärisch. Es zeigt
sich, dass sich die Systemleistung nur geringfügig ändert, falls sphärische Sekundärspiegel
verwendet werden (letzte Spalte der Tabelle).
Die räumliche Auflösung genügt den Anforderungen. Sie wird durch Beugung begrenzt,
so dass der Vorteil der geringen geometrischen Aberrationen nicht in Erscheinung tritt:
Der Durchmesser der Airy-Scheibe ist rund 500 mal größer als der Durchmesser der entsprechenden Spot-Diagramme. Die benötigte zeitliche Auflösung wird nicht erreicht, und
auch aufgrund der hohen Lichtverluste und der schlechten Längeneffizienz eignet sich das
Schwarzschild-Teleskop nicht zum Transport über lange Distanzen.
7.3 Schwarzschild-Teleskop
Schwarzschild-Teleskope
Bildgröße
Benötigte Auflösung
Öffnungswinkel
63
Vollständige
Ausleuchtung
3,43°
Geometrie
CherenkovSphärische
Kegel
Sekundärspiegel
10,4 mm
>12,0 lp/mm
2,19°−2,43°
3,43°
Systembrennweite fs
518 mm
Krümmungsradius r1
1465 mm
Krümmungsradius r2
1465 mm
Konische Konstante δ1
5,828
Konische Konstante δ2
0,172 bzw. 0
Primär ↔ Sekundär
1036 mm
Sekundär1 ↔ Sekundär2
0 mm
∅ Primärspiegel (Teleskop 1)
66,5 mm
∅ Primärspiegel (Teleskop 2)
108 mm
∅ Primärspiegelöffnung (T1)
26 mm
∅ Primärspiegelöffnung (T2)
36 mm
∅ Sekundärspiegel (T1 und T2)
150 mm
∅ Sekundärspiegelöffnungen
44 mm
Gesamtlänge
2500 mm
Auf lösungsvermögen
Räumliche Auflösung
Bildmitte [lp/mm]
52
∼25
Bildrand [lp/mm]
26
∼5
Ankunftszeiten-Verteilung
normiert mit Gesamtlänge
FWHM [fs/m]
312±9
12,8±1,7
Breite oberhalb 1% [fs/m]
750±8
628±13
Effizienz
Winkelakzeptanz
1,99°-2,43°
−
Spiegel pro Länge [m 1]
1,6
Längeneffizienz
37,65%
Lichtverlust durch Geometrie
Bildmitte
0,834±0,001 0,747±0,001
Bildrand
0,936±0,001 0,910±0,001
44
22
307±17
745±15
0,834±0,001
0,936±0,001
Tabelle 7.4: Spezifikation und Leistung der auf gleichmäßige Lichtintensität optimierten
Schwarzschild-Teleskope (ausgehend von Fall 3).
8 Abbildung mit Parabolspiegel-Teleskopen
Die untersuchten klassischen Spiegelteleskope bestehen jeweils aus Spiegeldoublets. Eine
Umsetzung im 4f-Schema benötigt zwei Doublets, also vier Spiegel. Um eine geringere
Anzahl von Elementen zu erreichen, werden Teleskope aus einzelnen Parabolspiegeln untersucht, bei denen das 4f-Schema mit zwei Spiegeln auskommt. Zunächst wird ein System
untersucht, bei dem sich die beiden Spiegel gegenüber stehen. Es hat eine Längeneffizienz von Null, erreicht aber eine gute Abbildungsqualität. Ergebnisse aus Messungen und
Simulationen werden präsentiert (Abschnitt 8.1). Sie geben eine obere Grenze für die
nachfolgend untersuchten System-Variationen an (Abschnitt 8.2), die eine ausreichende
Längeneffizienz haben. Bei einer Verkettung solcher Systeme treten teilweise neue Effekte
auf, diese werden in Abschnitt 8.3 untersucht. Abschließend werden sogenannte Off-AxisParabolspiegel untersucht, bei denen nur ein Segment eines Parabolspiegels verwendet
wird, welches sich seitlich der Symmetrieachse befindet (Abschnitt 8.5).
8.1 Untersuchung des einfachen Parabolspiegelsystems
Das in Abbildung 8.1 gezeigte System stellt den einfachsten Fall einer 4f-Anordnung aus
Parabolspiegeln dar und wurde daher durch Messungen und Simulationen untersucht.
Für das optische Übertragungssystem ist diese Anordnung aufgrund ihrer fehlenden Längeneffizienz nicht geeignet, jedoch legen die hier erreichbaren räumlichen Auflösungen
eine obere Grenze für die später untersuchten Systeme fest. Bei diesen werden die Spiegel gedreht, um eine verwendbare Längeneffizienz zu erreichen. Die Simulationsergebnisse
für das einfache Parabolspiegelsystem sind in Tabelle 8.1 zusammengefasst. Es wurden
dabei Brennweiten und Krümmungsradien von Parabolspiegeln zugrundegelegt, die im
Optiklabor bei PITZ vorhanden sind (f = 1500 mm und D = 250 mm, f /6). Dies entspricht ungefähr Fall 3 aus Tabelle 6.1, es muss eine Bildgröße von 7,5 mm mit einer
Auflösung von 17 lp/mm abgebildet werden. Diese und die übrigen Anforderungen (gute
Zeitauflösung, geringe Lichtverluste) werden erfüllt.
64
8.1 Untersuchung des einfachen Parabolspiegelsystems
65
Abbildung 8.1: Zwei Parabolspiegel gleicher Brennweite in 4f-Anordnung.
Lichtweg
Längeneffizienz
Räumliche Auflösung
Zeitliche Auflösung
relative Lichtintensität
6m
0
Bildmitte
5 mm seitlich
10 mm seitlich
12 mm seitlich
15 mm seitlich
20 mm seitlich
System
Bildmitte
5 mm seitlich
10 mm seitlich
15 mm seitlich
20 mm seitlich
240 lp/mm
230 lp/mm
210 lp/mm
100 lp/mm
55 lp/mm
30 lp/mm
< 0,5 fs/m
≡1
0,95
0,90
0,85
0,80
Tabelle 8.1: Simulationsergebnisse zum Parabolspiegel-Aufbau aus Abbildung 8.1. Es wurden Parabolspiegel mit f = 1500 mm und D = 250 mm verwendet.
Zur Messung der erreichbaren Auflösung werden die zwei Parabolspiegel auf einer optischen Bank platziert und mithilfe eines Justierlasers ausgerichtet. Eine Kamera und ein
Auflösungsgitter werden in möglichst geringem Abstand auf der optischen Bank befestigt,
so dass sie sich jeweils in einem Brennpunkt befinden (Abbildung 8.2). Da sie nicht genau
an der selben Stelle stehen können, wird der Spiegelabstand etwas größer als 2f gewählt.
Abbildung 8.2: Schematische Darstellung des Versuchsaufbaus (nicht maßstabsgetreu).
Die Lichtquelle wird seitlich neben dem linken Parabolspiegel platziert.
66
8 Abbildung mit Parabolspiegel-Teleskopen
Das Auflösungsgitter muss ausreichend beleuchtet werden. Eine Beleuchtung von der
Rückseite her würde die Platzprobleme im Versuchsaufbau noch verstärken. Daher wird
das Auflösungsgitter reflektiv benutzt, also von vorne beleuchtet. Die Lichtquelle wurde direkt neben dem ersten Parabolspiegel (in der Abbildung links) aufgestellt. Das
Auflösungsgitter wird leicht gedreht, so dass der Hauptteil des reflektierten Lichts auf
dem Parabolspiegel ankommt. Die dadurch in horizontaler Richtung auftretende scheinbare Verkleinerung des Auflösungsmusters um cos 4°≈ 0,9976 ist vernachlässigbar. Diese
Platzierung der Lichtquelle hat den Vorteil, dass sich das Bild der Glühwendel auf der
Oberfläche des zweiten Parabolspiegels befindet, wo es keinen Einfluss auf die Abbildung
am Ort der Kamera hat. Dieser Zusammenhang ist keine Besonderheit der gewählten
Brennweite, sondern folgt wegen
dQuelle↔Spiegel
1
= dSpiegel
1↔Spiegel 2
= 2f = r.
(8.1)
Dabei ist r der Krümmungsradius am Spiegelmittelpunkt. Die Lichtquelle und der zweite
Spiegel befinden sich also gerade im Krümmungsmittelpunkt des ersten Spiegels und erfüllen daher die Abbildungsbedingung ( 1b + g1 = 2r ). Da es sich nicht um sphärische Spiegel
handelt, ist die Abbildung unscharf.
Die Aufnahme des Auflösungsgitters ist in Abbildung 8.3 zu sehen. Die Auflösung wird
durch die Kamera begrenzt: Die Pixel des CCD-Chips haben eine Kantenlänge von 4,3
µm. Zwei Objekte können in der Aufnahme erst dann zuverlässig als getrennt erkannt
werden, wenn sie einen Abstand von wenigstens 2 Pixeln haben. Wenn die Objektkanten
mit den Pixelkanten zusammenfallen, genügt bereits ein Abstand von einem Pixel. Dies
wird durch Tabelle 8.2 veranschaulicht. Ein Linienpaar (lp) besteht aus einem hellen und
einem dunklen Streifen und muss wenigstens 4 Pixel breit sein, um zuverlässig von der
Kamera aufgelöst werden zu können. Aussagen über das Auflösungsvermögen sind somit
nur möglich bis zu einer Grenze von
νmax ≈
1 lp
4 · dP ixel
d.h. für dP ixel = 4.3 µm −→ νmax ≈ 58 lp/mm.
(8.2)
Das Gitter ist in mehrere Gruppen mit je 6 Elementen unterteilt, oben rechts in Abbildung 8.3 sieht man das erste Element der Gruppe 2, und im unteren Teil befinden sich die
Elemente 2-2 bis 2-6. Oben links befindet sich Gruppe 3, in der Mitte die Gruppen 4 und
5 usw. Aus der Messung bestimmt man das kleinste noch getrennt erkennbare Element
von Strichen in vertikaler Richtung zu 5-2, in horizontaler Richtung zu 6-1, dies entspricht
einer Auflösung von 40 lp/mm in horizontaler und 60 lp/mm in vertikaler Richtung. Dabei ist zu berücksichtigen, dass die vertikalen Striche gerade aufgrund des horizontalen
Auflösungsvermögens zu erkennen sind und umgekehrt. Mit dem oben gezeigten Versuchsaufbau wird also eine Abbildungsqualität erreicht, die in vertikaler Richtung an das
Auflösungsvermögen der Kamera heran reicht oder es sogar übersteigt.
Der Unterschied zwischen vertikaler und horizontaler Auflösung ist auf die Störung des
Strahlengangs durch die Kamera, das Auflösungsgitter und ihre Halterungen zurückzuführen, an deren Kanten Beugung auftritt. Die Gegenstände sind vor allem in vertikaler
8.2 Variationen des Spiegelteleskops
67
Abbildung 8.3
Links: Die umrandete Fläche entspricht einer Größe von 4 mm×4 mm und etwa 850 × 850 Pixeln.
Man findet: 40 lp/mm Auflösung in horizontaler Richtung (roter Pfeil) und 60 lp/mm Auflösung
in vertikaler Richtung (blauer Pfeil). Rechts: Vergrößerung des inneren Teils des Auflösungsgitters.
Richtung ausgedehnt, so dass die horizontale Auflösung stärker betroffen ist: Eine Blockierung des Lichtwegs durch eine längliche, in vertikaler Richtung ausgedehnte Struktur
erzeugt ein Beugungsmuster, dass dem einer schmalen vertikalen Blende gleicher Größe
entspricht (Babinetsches Theorem, siehe z.B. [Gob78], S. 364).
8.2 Variationen des Spiegelteleskops
Zwei Variationen des einfachen Spiegelteleskops sollen untersucht werden, sie entstehen
aus diesem durch Drehung der Spiegel um 45° (Abbildungen 8.4 und 8.5). Die effektiven
Brennweiten ändern sich dabei, daher müssen die Abstände angepasst werden, es handelt
sich aber noch immer um 4f-Anordnungen. Der in Abbildung 8.4 gezeigte Fall entsteht
durch Drehung der beiden Spiegel im gleichen Drehsinn und wird im folgenden als „punktsymmetrisch“ bezeichnet, der in Abbildung 8.5 gezeigte Fall entsteht durch eine Drehung
der Spiegel im entgegengesetzten Drehsinn und wird als „axialsymmetrisch“ bezeichnet.
Die Strahlenverläufe sind bis kurz vor dem zweiten Spiegel identisch, unterscheiden sich
dann aber erheblich, und dies nicht nur durch die entgegengesetzte Richtung der optischen
Achse.
Die Idee für solche Systeme entstand bereits vor dieser Arbeit bei PITZ [Bäh07], vor allem
aus praktischen Gesichtspunkten: die Anordnungen ermöglichen eine gute Längeneffizi-
68
8 Abbildung mit Parabolspiegel-Teleskopen
Ortsfrequenz
1 lp / (2 · Pixelgröße)
1 lp / (4 · Pixelgröße)
Streifenmuster
Intensitätsprofil
auf CCD-Chip
Aufgenommenes Profil:
günstigster Fall
Aufgenommenes Profil:
ungünstigster Fall
Tabelle 8.2: Begrenzung des Auflösungsvermögens einer CCD-Kamera durch ihre Pixelgröße. Objekte mit einem Abstand von einer Pixelgröße werden nur im günstigsten Fall klar aufgelöst, im ungünstigsten Fall erkennt man überhaupt keine Struktur. Ab einem Abstand von 2 Pixelgrößen werden die Objekte zuverlässig getrennt aufgelöst.
enz bei geringen Lichtverlusten, und Parabolspiegel sind kommerziell erhältlich. Beide
Variationen haben nur eine stückweise definierte optische Achse, die sich jedoch stets von
den Rotationsachsen der Spiegel unterscheidet. Weder paraxiale Näherung noch SeidelAberrationen sind für ein solches System definiert. Trotzdem sind mit diesen Systemen
Abbildungen möglich, wie die nachfolgenden Untersuchungen zeigen.
Abbildung 8.4
Punktsymmetrischer Aufbau.
Abbildung 8.5
Axialsymmetrischer Aufbau.
8.2 Variationen des Spiegelteleskops
69
8.2.1 Brennweite eines gedrehten Parabolspiegels
In Abbildung 8.4 und 8.5 ist zu sehen, dass es zwischen den beiden Parabolspiegeln scheinbar einen Fokus gibt. Tatsächlich wird der Strahl jedoch nur in einer Richtung fokussiert
(in der abgebildeten x-z-Ebene). In der Ebene, welche die Drehachsen der Spiegel beinhaltet (x-y-Ebene), läuft das Licht parallel von Spiegel zu Spiegel, so wie man es bei einem
Parabolspiegel erwartet (Abbildung 8.6). Auf ein Strahlbündel, welches in y-Richtung aufgefächert ist, wirkt der Spiegel wie ein Parabolspiegel, auf ein in x-Richtung aufgefächertes
Strahlbündel jedoch wie ein prolater Ellipsoid (siehe Abbildung 5.2).
Abbildung 8.6: In der x-z-Ebene wirkt der gedrehte Parabolspiegel wie ein Ellipsoid, in
der y-z 0 -Ebene wie ein Paraboloid.
Man kann diese Eigenschaften auf zwei Arten erklären, beide geben Aufschluss über die
Natur des Vorgangs:
1.) Denkt man sich die optische Achse entlang der Symmetrieachse des Paraboloiden (Abbildung 8.7), so befindet sich der abzubildende Gegenstandspunkt in x0 -Richtung nicht auf
der der optischen Achse, während es in y-Richtung keine Abweichung von der optischen
Achse gibt. Es ist daher zu erwarten, dass die Abbildung in der x-z-Ebene untypische
Eigenschaften aufweist. Der Gegenstandspunkt befindet sich in der Brennebene,
die ef√
fektive Brennweite eines um 45° gedrehten Parabolspiegels ist fef f = 2fP arabel .
2.) Der Schnitt einer geneigten Ebene mit einem Paraboloiden ergibt eine Ellipse1 . Es
entsteht näherungsweise eine Abbildung wie bei einem prolaten Ellipsoiden. Verschiedene
Strahlbündel „spüren“ dabei jedoch eine unterschiedliche Spiegelform, abhängig von ihrem Ausgangspunkt und dem mit der optischen Achse eingeschlossenen Winkel, dies führt
zu zusätzlichen Aberrationen.
1
p
x2 + y 2 = ax + b ⇒ y = ±
R12 − (x − R2 )2 . Durch den Schnitt
q eines Paraboloiden mit einer geneigten
Ebene entsteht also eine Ellipse mit den Halbachsen R1 =
ein Kreis mit Radius a2 .
a 2
2
+ b2 und R2 =
a
,
2
bzw. für b = 0
70
8 Abbildung mit Parabolspiegel-Teleskopen
Abbildung 8.7: Effektive Brennweite eines gedrehten Parabolspiegels. Die Brennebene des
Spiegels ist rot hervorgehoben.
8.2.2 Untersuchung der Abbildungsqualität
Beide Variationen wurden im Labor aufgebaut. Die mit ihnen erzeugte Abbildung des
Auflösungsgitters wurde mit einer CCD-Kamera aufgenommen. Die Ergebnisse sind in
den Abbildungen 8.8 und 8.9 gezeigt. Das Auflösungsgitter wurde seitlich zur optischen
Achse bewegt und die Kamera entsprechend nachgeführt, um die erreichbare Auflösung
über einen größeren Bereich zu bestimmen. Die Kameraposition
wurde auch entlang der
√
optischen Achse variiert. Es wurden Spiegel mit fef f = 2f ≈ 933,4 mm und D =
100 mm verwendet, also mit einer Apertur von f /9,3. Dies entspricht etwa Fall 3 aus
Tabelle 6.1. Ein System mit dieser Apertur sollte eine Auflösung von etwa 11 lp/mm
über eine Bildgröße von 12 mm erreichen. Keines der Systeme erfüllt diese Anforderung.
Punktsymmetrischer Aufbau
Für das punktsymmetrische System wird eine Auflösung von etwa 10 lp/mm in x-Richtung
erreicht, und eine Auflösung von 5 lp/mm in y-Richtung (Abbildung 8.8). Die Auflösung
wird dabei vor allem durch den hellen Hintergrund und den daraus resultierenden schlechten Kontrast begrenzt. Die Aufnahmen seitlich der optischen Achse zeigten, dass die
Auflösung über eine Fläche von mehreren cm2 in x und y-Richtung gleich bleibt. Die
erreichte Auflösung und Gestalt der Bildfehler konnte in Simulationen reproduziert werden (Abbildung 8.10 links). Man erkennt, dass der helle Hintergrund im Wesentlichen die
Kontur einer gedrehten Spiegelfläche hat. Der erste Parabolspiegel dient dabei als ausgedehnte Lichtquelle, der Rand des zweiten Parabolspiegels beschneidet das Strahlenbündel
und legt so die Gestalt des Hintergrundlichts fest. Mit anderen Worten: Die im System
auftretenden Aberrationen sind so groß, dass es sich beinahe mehr um eine Beleuchtungsoptik handelt als um eine Abbildungsoptik. Simulationen zeigen, dass die Aberrationen
stark mit den Öffnungswinkeln der einfallenden Lichtbündel zunehmen: Verkleinert man
die Spiegeldurchmesser, so lässt sich eine erheblich bessere Auflösung erreichen (Abbildung 8.10 rechts). Das Verhältnis aus Apertur und transportierter Bildgröße genügt dann
allerdings nicht mehr den Anforderungen.
8.2 Variationen des Spiegelteleskops
Abbildung 8.8: Abbildung des Auflösungsgitters durch das in Abbildung 8.4 gezeigte
punktsymmetrische System. Der Bildausschnitt hat etwa eine Größe von
4 mm×4 mm.
Abbildung 8.9: Abbildung des Auflösungsgitters durch das in Abbildung 8.5 gezeigte
axialsymmetrische System. Der Bildausschnitt hat etwa eine Größe von
4 mm×4 mm. Der Innenteil (ca. 1 mm2 ) ist rechts vergrößert dargestellt.
71
72
8 Abbildung mit Parabolspiegel-Teleskopen
Abbildung 8.10: Simulationen des punktsymmetrischen Systems. Gezeigt ist eine geometrische Bilduntersuchung eines 1 mm2 großen Gegenstands. Links
wurden die bei der Messung verwendeten Spiegel mit D = 100 mm simuliert, rechts wurde der Durchmesser auf D = 30 mm reduziert.
Axialsymmetrischer Aufbau
Für das axialsymmetrische System wird im Zentrum des Bildes eine Auflösung erreicht,
deren Messung durch die CCD-Kamera begrenzt wird (Abbildung 8.9). Es wurde hier ein
anderer Kameratyp als in Abschnitt 8.1 verwendet, dessen Pixel 8,3 µm breit sind. Nach
Gleichung (8.2) ergibt sich daraus ein Auflösungsvermögen von 30 lp/mm. Die Auflösung
bricht innerhalb weniger mm stark ein. Am rechten Bildrand ist die Abbildung stark
astigmatisch: Horizontale Linien werden deutlich besser aufgelöst als vertikale. Am linken
Bildrand ist dies nicht zu beobachten. Im axialsymmetrischen System werden die Aberrationen durch die zweite Spiegelfläche teilweise ausgeglichen. Daher ist der Hintergrund
für dieses System nicht aufgehellt.
Der Bereich, in dem die beste Auflösung erreicht wird, verschiebt sich seitlich, wenn der
Abstand vom zweiten Parabolspiegel zur Bildebene bzw. zur Kamera geändert wird (Abbildung 8.11). Es ist möglich, die Bildebene so zu drehen, dass über die ganze Bildebene
eine gute Auflösung erreicht wird, der erforderliche Drehwinkel der Bildebene wurde aus
den Messungen zu 76° bestimmt. Durch die Drehung tritt eine starke Verzerrung des Bildes auf. Anstatt der Bildebene kann auch die Gegenstandsebene um 76° gedreht werden.
Diese Idee wird in Abschnitt 8.3 weiter untersucht. Es scheint naheliegend, dass ein noch
besseres Ergebnis erreicht wird, wenn man sowohl Gegenstands- als auch Bildebene um
jeweils 45° dreht, so dass sie vollständig in der Brennebene des jeweils näheren Spiegels
liegen (siehe Abbildung 8.7), dies wurde jedoch in entsprechenden Simulationen nicht
beobachtet.
8.3 Verkettung von On-Axis-Parabolspiegeln
73
Abbildung 8.11: Die Lage des Bereichs der besten räumlichen Auflösung hängt von der
Position der Bildebene ab. Bestimmt man seine Lage für verschiedene
z-Positionen der Kamera, lässt sich daraus die Drehung der Bildebene
bestimmen.
8.3 Verkettung von On-Axis-Parabolspiegeln
Eine Drehung von Gegenstands- oder Bildebene führt zu einer Verbesserung der Auflösung
(siehe Abschnitt 8.2.2). Man kann sich diesen Effekt zu Nutze machen, ohne tatsächlich
ein Element des Systems drehen zu müssen: Verkettet man ein Teleskop aus 4 Parabolspiegeln auf die in Abbildung 8.12 gezeigte Weise, so dient das „gedrehte“ Zwischenbild,
welches von den ersten beiden Spiegeln erzeugt wird, als „gedrehter“ Gegenstand für die
nachfolgenden Systeme. Mit anderen Worten: die Aberrationen des ersten Teilsystems
werden durch die zusätzlichen Spiegel teilweise kompensiert. Dies ist in Simulationen
deutlich zu sehen (Abbildung 8.12), es treten jedoch auch neue Bildfehler auf, vor allem
Verzeichnung. Das System wurde auch im Labor untersucht, die Justierung stellte sich
als schwierig heraus. Das nach mehrfach wiederholter Justierung beste aufgenommene
Bild ist in Abbildung 8.13 gezeigt. Die erreichbare Auflösung ist im Vergleich zum 2Spiegel-System deutlich reduziert, jedoch ist kein so ausgeprägter Unterschied zwischen
74
8 Abbildung mit Parabolspiegel-Teleskopen
horizontaler und vertikaler Richtung zu erkennen. Die Bildqualität bleibt über die gezeigte Fläche (rund 3 mm×3 mm) weitgehend erhalten. Verkettungen von 8 Spiegeln wurden
ebenfalls simuliert, es wurde jedoch keine weitere Kompensation von Aberrationen beobachtet.
Abbildung 8.12: System aus 4 Parabolspiegeln (links) und simulierte Abbildungseigenschaften (rechts). Gezeigt ist ein 3 mm breiter Gegenstand (oben, 1),
das Zwischenbild (Mitte, 2) und das finale Bild (unten, 3).
8.4 Fazit: On-Axis-Parabolspiegel
Die untersuchten Parabolspiegelsysteme sind nicht für das optische Übertragungssystem
geeignet. Das in Tabelle 8.1 angegebene Auflösungsvermögen des einfachen Parabolspiegelsystems bleibt bei den anschließend untersuchten Systemvariationen nicht erhalten.
Die geforderte Auflösung und Bildgröße wird von keiner der Variationen oder Verkettungen erbracht. Die erreichte Zeitauflösung beträgt etwa 90 fs/m (axialsymmetrische
8.5 Simulation von Off-Axis-Parabolspiegeln
75
Abbildung 8.13: Abbildung des Auflösungsgitters durch ein System aus 4 Parabolspiegeln. Trotz mehrfacher Wiederholung der Justierung konnte keine gute
Abbildungsqualität erreicht werden.
4f-Anordnung, Breite oberhalb 1%) und ist damit etwas oberhalb des zulässigen Bereichs,
da die Zeitauflösung über 30 m weniger als 2 ps betragen soll. Bei geeignet gewählten Spiegeldurchmessern ist das System frei von geometrischen Lichtverlusten. Durch zusätzliche
Planspiegel kann die Längeneffizienz auf etwa 90% gesteigert werden.
8.5 Simulation von Off-Axis-Parabolspiegeln
Parabolspiegel sind kartesische Reflektoren, d.h. jeder Teil der Spiegelfläche erzeugt eine stigmatische Abbildung für einen Gegenstand auf der optischen Achse. Es ist daher
zulässig, ein Spiegelsegment zu verwenden, welches sich nicht auf der Symmetrieachse
des Paraboloiden befindet. Je nach Wahl des Segments entstehen dabei unterschiedliche
Ablenkwinkel (Abbildung 8.14). Wie bei den zuvor untersuchten Systemen wird ein Ablenkwinkel von 90° gewählt, da sich ein solches System voraussichtlich leichter an die
Gebäudegeometrie anpassen lässt. Das Verhältnis der ursprünglichen Parabelbrennweite
76
8 Abbildung mit Parabolspiegel-Teleskopen
fP zur effektiven Brennweite fef f ist festgelegt durch
Form der Parabel:
y = a · x2
2
fP = a · fef
f
1
⇒ fef f =
2a
=⇒ fef f = 2 · fP = rP
⇒
!
Steigung der Parabel: y 0 = 2a · x = 1
(8.3)
(8.4)
(8.5)
Die Steigung der Parabel muss in der Mitte des zu verwendenden Segments 1 = tan 45°
sein, damit eine Ablenkung um 90° stattfindet. Die effektive Brennweite stimmt dann mit
dem Krümmungsradius rp der Parabel überein. Durch Angabe einer effektiven Brennweite und Festlegung der Spiegeldurchmesser ist die 4f-Anordnung vollständig beschrieben
(Abbildung 8.15). Die in Tabelle 6.1 angegebenen Fälle wurden simuliert, ihre Eigenschaften sind in Tabelle 8.3 angegeben. Die Spiegeldurchmesser wurden auf 150 mm festgelegt,
dann wurden die Systembrennweiten angepasst, um das gesamte Licht auch vom Rand
der Verteilung aufzusammeln.
Abbildung 8.14: Paare von Off-Axis-Parabolspiegeln mit verschiedenen Ablenkwinkeln.
Für eine 4f-Anordnung muss der Spiegelabstand abhängig vom Winkel
unterschiedlich gewählt werden, dies ist hier nicht berücksichtigt.
Die Systeme erfüllen die Anforderungen an räumliche und zeitliche Auflösung und können
auch für Cherenkov-Licht verwendet werden. Die räumliche Auflösung ist beugungsbegrenzt, die erreichbare Auflösung wächst daher mit der Apertur an. Die Längeneffizienz
2f f
beträgt 4fef
= 50% (siehe Abbildung 8.15), kann aber durch zwei zusätzliche Planspieef f
gel auf mehr als 80% gesteigert werden (Abbildung 8.16), abhängig von der verwendeten
Brennweite. Der Aufbau hat eine Winkelvergrößerung von 1, eine Verkettung mehrerer
Teleskope ist problemlos möglich.
Eine Fertigungsspezifikation für ein Paar Off-Axis-Parabolspiegel mit f = 1000 mm und
D = 150 mm wurde erarbeitet. Die Auswirkung der im Herstellerangebot angegebenen
Formabweichung von weniger als 1 µm (Peak to Valley) wurde untersucht, indem die
Oberflächen durch verschiedene Zernike-Polynome oder Sinus- und Cosinus-Terme mo-
8.6 Fazit: Off-Axis-Parabolspiegel
77
Abbildung 8.15: 4f-Anordnung von Off-Axis-Parabolspiegeln
Abbildung 8.16: Verbesserung der Längeneffizienz mit zusätzlichen Planspiegeln
duliert wurden. Die erreichbare Auflösung verringert sich durch die Modulationen in der
Regel nur geringfügig, in keinem Fall wird das System dadurch unbrauchbar. In einem
zweiten Schritt wurden die Spiegelorientierungen um bis zu ±30 verdreht, um Justierungenauigkeiten nachzuempfinden. Die räumliche Auflösung bricht dabei zum Teil auf
weniger als 10 lp/mm in Bildmitte und Bildrand ein. Die Justierung muss daher mit
hoher Genauigkeit erfolgen. Für das zu entwerfende Gesamtsystem werden ausführliche
Toleranzrechnungen notwendig sein.
8.6 Fazit: Off-Axis-Parabolspiegel
Mit Off-Axis-Parabolspiegeln wird in der Simulation eine hervorragende räumliche und
zeitliche Auflösung erreicht. Durch geeignete Wahl der Spiegeldurchmesser lassen sich geometrische Lichtverluste vollständig verhindern. Durch zwei zusätzliche Planspiegel kann
eine Längeneffizienz von über 80% erreicht werden. Bei der Justierung ist eine hohe Genauigkeit erforderlich. Ein Fertigungsspezifikation für ein Paar von Off-Axis-Parabolspiegeln
wurde erarbeitet, leider sind die bestellten Spiegel nicht vor Ende der Diplomarbeit eingetroffen. Es muss anhand von Labormessungen beurteilt werden, ob die Justierung mit
der erforderlichen Genauigkeit durchgeführt werden kann.
78
8 Abbildung mit Parabolspiegel-Teleskopen
Off-Axis-Parabolspiegel
Bildgröße
Benötigte Auflösung
Öffnungswinkel
Systembrennweite fs
Räumliche Auflösung
Bildmitte [lp/mm]
Bildrand [lp/mm]
Ankunftszeiten-Verteilung
bezogen auf 2fs
FWHM [fs/m]
Breite oberhalb 1% [fs/m]
Fall 1
Fall 2
50,0 mm
18,8 mm
>2,50 lp/mm
>6,67 lp/mm
0,71°
1,91°
3000 mm
1600 mm
Auf lösungsvermögen
Fall 3
10,4 mm
>12,0 lp/mm
3,43°
900 mm
51
48
97
93
174
156
0,0032±0,0005
0,0772±0,0035
Effizienz
0,17
0,5–0,95
0,0024±0,0001
0,1295±0,0061
0,0040±0,0010
0,3712±0,0187
0,31
0,5–0,91
0,56
0,5–0,86
Spiegel pro Lichtstrecke [m−1 ]
Längeneffizienz
Vollständige Winkelakzeptanz
Keine Lichtverluste durch Geometrie
Tabelle 8.3: Spezifikation und Leistung der Off-Axis-Parabolspiegelsysteme
9 Zusammenfassung und Ausblick
9.1 Vergleich der untersuchten Systeme
In Tabelle 9.1 wird die Eignung der untersuchten Systeme miteinander verglichen. Die
Systeme können mit unterschiedlichen Zielsetzungen optimiert werden. Daher sind die
Angaben in der Tabelle nicht streng an die zuvor präsentierten Zahlenwerte gebunden,
sondern spiegeln eine Einschätzung wider, wie gut sich das System in der jeweiligen Hinsicht optimieren lässt. Die meisten Ansätze sind in einer oder mehreren der untersuchten
Eigenschaften nicht für die Verwendung im Hauptteil des optischen Transportsystems
geeignet. Mit den Off-Axis-Parabolspiegeln wurden Systeme gefunden, welche die Anforderungen erfüllen und übertreffen.
Cassegrain-Teleskope
Gregory-Teleskope
Schwarzschild-Teleskope
On-Axis-Parabolspiegel
Off-Axis-Parabolspiegel
Räumliche
Auflösung
gut
gut
gut
ungeeignet
sehr gut
Zeitliche
Auflösung
sehr gut
ungeeignet
ungeeignet
ungeeignet
sehr gut
Lichtverluste
Längeneffizienz
ungeeignet
geeignet
ungeeignet
sehr gut
sehr gut
gut
geeignet
ungeeignet
sehr gut
sehr gut
Tabelle 9.1: Eignung der untersuchten Systeme im Vergleich.
9.2 Eingangsoptiken, Anpassung an die Streak-Kamera
Für jede Schirmstation, von der eine Auslese mit der Streak-Kamera möglich sein soll, ist
eine eigene Eingangsoptik erforderlich. Diese muss an die Größe und den Öffnungswinkel der abzubildenden Verteilung angepasst sein. Die Aufgabe der Eingangsoptik ist die
Reduzierung der für den Transport im Hauptteil notwendigen Apertur, dazu ist eine Anpassung des Abbildungsmaßstabes erforderlich. Zwischen Hauptteil und Streak-Kamera
muss der Abbildungsmaßstab erneut angepasst werden, die erforderliche Verkleinerung ist
abhängig von dem im Hauptteil realisierten Schema (siehe Tabelle 6.1).
Der Abbildungsmaßstab m ist durch das Verhältnis der Bild- und Gegenstandsweite eines
Systems gegeben, m = gb . Setzt man in einer 4f-Anordnung zwei Teleskope unterschiedlicher Brennweite zusammen, so lässt sich damit eine Verkleinerung oder Vergrößerung
bewerkstelligen. Durch die unterschiedliche Brennweite besitzt ein solches System eine
79
80
9 Zusammenfassung und Ausblick
geringere Symmetrie, so dass sich die auftretenden Aberrationen weniger stark kompensieren. Es ist daher wichtig, dass die einzelnen Teleskope bereits gut korrigiert sind. Für
die vorgestellten klassischen Teleskope trifft dies zu, für die Off-Axis-Parabolspiegel jedoch
nicht, da die Abbildung mit einem einzelnen Parabolspiegel eine starke Koma aufweist.
Dies gilt umso mehr, je stärker der Abbildungsmaßstab von 1 abweicht. Daher ist es
sinnvoll, die Vergrößerung oder Verkleinerung auf mehrere Elemente zu verteilen. Es ist
jedoch zu bedenken, dass dabei jedes Element anders dimensioniert sein muss, so dass
möglicherweise eine hohe Anzahl an Sonderanfertigungen benötigt wird.
Für die Eingangs- und Ausgangsoptiken sind die Anforderungen an Längeneffizienz und
Lichtverluste weniger streng, auch darf die Winkelvergrößerung von 1 abweichen. Es gibt
daher eine Vielzahl an möglichen Ansätzen. Die Untersuchungen zu vergrößernden und
verkleinernden Spiegelsystemen konnten im Rahmen dieser Arbeit nicht abgeschlossen
werden.
9.3 Nächste Schritte
Die Eigenschaften der Off-Axis-Parabolspiegel sollen im Optiklabor untersucht werden.
Von diesen Spiegeln werden sehr gute Abbildungseigenschaften erwartet, sofern die Justierung in ausreichender Genauigkeit möglich ist. Voraussichtlich wird dann der Hauptteil des reflektiven optischen Transportsystems mit Off-Axis-Parabolspiegeln realisiert.
Sobald die Untersuchungen zu Eingangs- und Ausgangsoptik abgeschlossen sind, können dann mögliche Gesamtsysteme untersucht werden, in denen teilweise auch schon die
Gebäudegeometrie berücksichtigt werden sollte. Toleranzrechnungen werden dabei eine
wesentliche Rolle spielen. Für ein so großes optisches System sind diese außerordentlich
komplex, da der Justiervorgang bereits in den Rechnungen berücksichtigt werden muss. Es
scheint sinnvoll, parallel zu diesen Untersuchungen eine ausführliche Justiervorschrift zu
erarbeiten. Insbesondere die Eingangs- und Ausgangsoptiken werden voraussichtlich hohe
Anforderungen an die zu verwendenden Spiegel stellen und möglicherweise auch Sonderanfertigungen benötigen. Es ist zu prüfen, ob kostengünstigere Lösungen bestehen, die
eine ausreichende Qualität ermöglichen (so wie beispielsweise der Sekundärspiegel beim
Schwarzschild-Teleskop durch einen sphärischen Spiegel ersetzt werden kann).
Literaturverzeichnis
[Bäh03] Bähr, J.; Lipka, D. und Lüdecke, H.: Optical Transmission Line For Streak
Camera Measurements at PITZ, in: DIPAC 2003, Mainz, Germany
[Bäh07] Bähr, J.; Lüdecke, H. und Rönsch, J.: Optical System for Measuring Electron
Bunch Length and Longitudinal Phase Space at PITZ: Extension and Methodical Investigations, in: DIPAC 2007, Venice, Mestre, Italy
[Bir93] Birch, K.P. und Downs, M.J.: An updated Edlén equation for the refractive
index of air. Metrologia (1993), Bd. 30:S. 155–162
[Bir94] Birch, K.P. und Downs, M.J.: Correction to the updated Edlén equation for
the refractive index of air. Metrologia (1994), Bd. 31:S. 315–316
[Bon84] Bonifacio, R.; Pellegrini, C. und Narducci, L.M.: Collective Instabilities
and High-Gain Regime in a Free Electron Laser. Optics Communications (1984),
Bd. 50:S. 373–378
[Edl66] Edlén, B.: The refractive index of air. Metrologia (1966), Bd. 2:S. 71–80
[Edm08] Edmund Optics Homepage:
http://www.edmundoptics.com/TechSupport/DisplayArticle.cfm?articleid=259
(Stand Juli 2008)
[Fey01] Feynman, Sands, Leighton: Feynman Vorlesungen über Physik, Oldenbourg
Wissenschaftsverlag (2001)
[Flö97] Flöttmann, Klaus: Note on the thermal emittance of electrons emitted by
Cesium Telluride photo cathodes, Techn. Ber. 1, DESY Hamburg (1997), TESLA
FEL-Report
[Flö99] Flöttmann, K. und Stephan, F.: Antrag an das BMBF "HochfrequenzPhotoinjektoren als Quellen für Elektronenpakete extrem kleiner Länge
und Emittanz", http://pitz.desy.de/publications/publications/index_eng.html
(Stand Juli 2008) (1999)
[Flö00] Flöttmann, Klaus: ASTRA - A Space Charge Tracking Algorithm, DESY
(2000)
[FLA08] FLASH Homepage: http://flash.desy.de (Stand Juni 2008)
81
82
Literaturverzeichnis
[Gin82] Ginzburg, V. L.: Transition Radiation and Transition Scattering. Physica
Scripta. (1982), Bd. T2/1:S. 182–191
[Gob78] Gobrecht, Heinrich (Herausgeber): Bergmann-Schaefer, Lehrbuch der Experimentalphysik, Bd. 3, Optik, Walter de Gruyter, Berlin, New York (1978)
[Ham04] Hamamatsu: Universal Streak Camera C5680 Series (2004)
[Kor91] Korsch, Dietrich: Reflective Optics, Academic Press, Inc. (1991)
[Led07a] Lederer, S. et al.: Investigations on the Thermal Emittance of Cs2Te Photocathodes at PITZ, in: FEL 2007, Novosibirsk, Russia
[Led07b] Lederer, S. et al.: XPS studies of Cs2Te Photocathodes, in: FEL 2007, Novosibirsk, Russia
[Lin08] Linos Photonics AG Homepage: http://www.linos.com/pages/home/shopoptik/achromate-nir-doubletts/achromate-positiv/technische-erlaeuterungen/
(Stand Juni 2008)
[Lip04] Lipka, D.: Untersuchungen zum longitudinalen Phasenraum an einem Photoinjektor für niedrige Strahlemittanz, Dissertation, Humboldt-Universität zu Berlin
(2004)
[Mes99] Meschede, Dieter: Optik, Licht und Laser, Teubner Stuttgart, Leipzig (1999)
[Mil03] Miltchev, V. et al.: Transverse Emittance Measurements at the Photo Injector Test Facility at DESY Zeuthen (PITZ), in: DIPAC 2003, Mainz, Germany
[Rön06] Rönsch, J. et al.: Investigations of the Longitudinal Phase Space at PITZ, in:
EPAC 2006, Edinburgh, UK
[Sta07] Staykov, L. et al.: Measurement of the Projected Normalized Transverse
Emittance at PITZ, in: FEL 2007, Novosibirsk, Russia
[Ste07] Stephan, F.: Recent Experimental Results from PITZ
http://accelconf.web.cern.ch/accelconf/f07/TALKS/WEBAU02_TALK.PDF
(2007), FEL 2007, Novosibirsk, Russia
[Ste08] Stephan, F. et al.: Detailed characterization of electron sources at PITZ yielding first demonstration of European XFEL beam quality (2008), (to be published)
[Wil05] Will, I.; Koss, G. und Templin, I.: The upgraded photocathode laser of the
TESLA Test Facility. Nuclear Instruments and Methods in Physics Research
(2005), Bd. A(541):S. 467–477
[XFE08] XFEL Projekt Homepage: http://xfel.desy.de (Stand Juni 2008)
Abbildungsverzeichnis
2.1
2.2
2.3
2.4
Schema der PITZ-Anlage im Sommer 2007. . . . . . . . . . . . . . . . . .
1,5-zellige Kupfer-Kavität des PITZ . . . . . . . . . . . . . . . . . . . . .
Typisches zeitliches Profil eines Laserpulses (August 2007) . . . . . . . . .
Messung und Simulation eines longitudinalen Phasenraums (aus [Rön06])
3.1
3.2
3.3
3.4
3.5
3.6
Skizze eines Cherenkov-Lichtkegels . . . . . . . . . . . . . . .
Energieabhängigkeit der Emissionswinkel von Cherenkov- und
Schematische Darstellung des Teilkonus-Verfahrens . . . . . .
Intensitätsverteilung der optischen Übergangsstrahlung . . . .
Gesamtenergie der OTR-Strahlung . . . . . . . . . . . . . . .
Aufbau und Funktionsweise einer Streak-Kamera . . . . . . .
3
4
5
8
. . . . . . .
OTR-Licht
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
10
10
11
12
13
14
Schema des optischen Übertragungssystems bei PITZ (Sommer 2007). . .
Zwei Linsen im 4f-Schema . . . . . . . . . . . . . . . . . . . . . . . . . . .
Verbesserung der zeitlichen Auflösung durch Farbfilter . . . . . . . . . . .
Relative Ankunftszeit der verschiedenen Wellenlängen-Anteile . . . . . . .
Räumliches und zeitliches Laserprofil (Juni 2007) . . . . . . . . . . . . . .
Messung von Elektronenpaket-Länge und Impulsverteilung . . . . . . . . .
Entsprechende Simulationen des longitudinalen Phasenraums . . . . . . .
Einfache Abschätzung der relativen Ankunftszeiten . . . . . . . . . . . . .
Geometrische Simulation der relativen Ankunftszeiten . . . . . . . . . . .
Einfache Abschätzung der relativen Ankunftszeiten, mit Filter . . . . . .
Geometrische Simulation der relativen Ankunftszeiten, mit Filter . . . . .
Absorption im derzeitigen optischen Transportsystem . . . . . . . . . . .
Strahlungsschäden an Linsen und Erholung durch Erhitzen, Messung der
relativen Transmission . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.14 Zusammenhang zwischen Transmission vor und nach dem Erhitzen . . . .
4.15 Zeitauflösung von Einzellinse, Achromat und Apochromat . . . . . . . . .
16
16
17
17
18
19
21
22
23
24
24
26
5.1
5.2
Koordinatensysteme, aus [Kor91] . . . . . . . . . . . . . . . . . . . . . . .
Beispiele zu Formen und Strahlverläufen von Kegelschnitten. . . . . . . .
37
39
6.1
6.2
Aufbau des Raytracing-Testsystems . . . . . . . . . . . . . . . . . . . . . .
Vergleich der Spot-Diagramme aus kommerzieller Software und selbstgeschriebenem Programm . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10
4.11
4.12
4.13
27
28
29
42
83
84
Abbildungsverzeichnis
6.3
6.5
6.6
Verteilung der Ankunftszeiten, berechnet in der kommerziellen Software
und dem C++-Programm . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modellierung von Cherenkov-Licht in der verwendeten Optiksoftware (Erläuterung siehe Text). . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modulationsübertragungsfunktion für HIGH1.Scr2 . . . . . . . . . . . . .
Beispiel für geometrische Bilduntersuchung . . . . . . . . . . . . . . . . .
45
47
47
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
Schema eines Cassegrain-Teleskops . . . . . . . . . . . . . . . . . . . . .
Eine 4f-Anordnung aus zwei Cassegrain-Teleskopen. . . . . . . . . . . .
Verkettung von Cassegrain-Teleskopen mit Winkelvergrößerung 6= 1 . .
Cassegrain-Teleskop: Systembrennweite und Längeneffizienz . . . . . . .
Cassegrain-Teleskop: Auflösung und Einfluss von Verkippung . . . . . .
Diagramme zur Leistung der optimierten Cassegrain-Teleskope (Fall 2).
Schema eines Gregory-Teleskops . . . . . . . . . . . . . . . . . . . . . .
Gregory-Teleskop mit Halbspiegeln . . . . . . . . . . . . . . . . . . . . .
Aufbau des Schwarzschild-Teleskops. . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
50
51
52
53
54
57
61
61
62
8.1
8.2
8.3
8.4
8.5
8.6
8.7
8.8
8.9
8.10
8.11
8.12
8.13
8.14
8.15
8.16
Zwei Parabolspiegel gleicher Brennweite in 4f-Anordnung. . . .
Versuchsaufbau zum einfachen Parabolspiegelsystem . . . . . .
Auflösungsvermögen des einfachen Parabolspiegelsystems . . .
Punktsymmetrischer Aufbau . . . . . . . . . . . . . . . . . . . .
Axialsymmetrischer Aufbau . . . . . . . . . . . . . . . . . . . .
Wirkung eines gedrehten Parabolspiegels . . . . . . . . . . . . .
Brennweite eines gedrehten Parabolspiegels . . . . . . . . . . .
Messung am punktsymmetrischen System . . . . . . . . . . . .
Messung am axialsymmetrisch System . . . . . . . . . . . . . .
Simulationen des punktsymmetrischen Systems . . . . . . . . .
Wandernder Fokus . . . . . . . . . . . . . . . . . . . . . . . . .
Verwendung von 4 Parabolspiegeln . . . . . . . . . . . . . . . .
Messung am System aus 4 Parabolspiegeln . . . . . . . . . . . .
Off-Axis-Parabolspiegel mit verschiedenen Ablenkwinkeln . . .
4f-Anordnung von Off-Axis-Parabolspiegeln . . . . . . . . . . .
Verbesserung der Längeneffizienz mit zusätzlichen Planspiegeln
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
65
65
67
68
68
69
70
71
71
72
73
74
75
76
77
77
A.1 Laboraufbau zur Untersuchung des Systems mit 4 Parabolspiegeln . . . .
A.2 Foto des Laboraufbaus . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
87
6.4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
43
Tabellenverzeichnis
5.1
5.2
5.3
Beschreibung der Seidel-Aberrationen . . . . . . . . . . . . . . . . . . . .
Entstehung und typische Formen einiger Seidel-Aberrationen. . . . . . . .
Abbildungseigenschaften der Kegelschnitte. . . . . . . . . . . . . . . . . .
33
34
38
6.1
Anforderungen an das Hauptsystem . . . . . . . . . . . . . . . . . . . . .
46
7.1
7.2
7.3
7.4
Leistung
Leistung
Leistung
Leistung
.
.
.
.
56
58
60
63
8.1
8.2
8.3
Simulation eines einfachen Parabolspiegelteleskops . . . . . . . . . . . . .
Auflösungsbegrenzung durch Pixelgröße . . . . . . . . . . . . . . . . . . .
Leistung der Off-Axis-Parabolspiegelsysteme . . . . . . . . . . . . . . . . .
65
68
78
9.1
Eignung der untersuchten Systeme im Vergleich. . . . . . . . . . . . . . .
79
der optimierten Cassegrain-Teleskope . . . .
einer Verkettung von Cassegrain-Teleskopen .
der Gregory-Teleskope . . . . . . . . . . . . .
der Schwarzschild-Teleskope . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
85
A Anhang
1
2
3
4
5
6
7
// Geometrie v o r b e r e i t e n
v e c t o r <S u r f a c e ∗> system ;
v e c t o r <L in e∗> r a y s ;
Rotation r ;
r . RotateAboutXDeg ( 1 8 0 ) ;
system . push_back (new P a r a b o l o i d ( P oi nt ( 0 , 0 , 5 0 0 ) , r , 5 0 0 , 5 0 ) ) ;
system . push_back (new P a r a b o l o i d ( P oi nt ( 0 , 0 , 3 0 0 ) , R o t a t i o n : : Unity ,
300 , 20) ) ;
8
9
10
11
12
13
14
15
16
17
// S t r a h l e n f e s t l e g e n
double src_x = 0 , src_y = 0 ;
f o r ( int x = −50; x <= 5 0 ; x += 5 )
f o r ( int y = −50; y <= 5 0 ; y += 5 )
r a y s . push_back (new Li ne ( P oi nt ( src_x , src_y , 0 ) , P oi nt ( x , y , 5 0 0 ) ) ) ;
// B e z u g s s y s t e m f e s t l e g e n ( B i l d e b e n e )
Volume r e f ( Po in t ( 0 , 0 , 4 0 0 ) , R o t a t i o n : : Unity ) ;
// M i t t l e r e P o s i t i o n d e s B i l d p u n k t e s bestimmen
double sum_x = 0 , sum_y = 0 ; int n = 0 ;
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
// S e q u e n t i e l l e s R a y t r a c i n g d u r c h f ü h r e n , Loop ü b e r S t r a h l e n
v e c t o r <L in e ∗ >:: i t e r a t o r i t ;
f o r ( i t = r a y s . b e g i n ( ) ; i t != r a y s . end ( ) ; ++i t ) {
Li ne& ray = ∗∗ i t ;
int m i s s = 0 ;
// S c h n i t t p u n k t & R e f l e k t i o n bestimmen , Loop ü b e r O b e r f l ä c h e n
v e c t o r <S u r f a c e ∗ >:: i t e r a t o r i t 2 ;
f o r ( i t 2 = system . b e g i n ( ) ; i t 2 != system . end ( ) ; ++i t 2 ) {
Surface ∗ surf = ∗ it2 ;
i f ( s u r f −>I n t e r s e c t s ( ray ) ) ray = s u r f −>R e f l e c t i o n ( ray ) ;
e l s e ++m i s s ;
}
// S t r a h l e n i g n o r i e r e n , d i e n i c h t a l l e Elemente t r e f f e n
i f ( m i ss > 0 ) continue ;
// B i l d p u n k t a u s g e b e n
ray . ChangeReference (& r e f ) ;
Po i nt p = ray . GetPointRef ( ray . GetPosRefForZ ( 0 ) ) ;
c o u t << " C l o s e s t p o i n t i n r e f e r e n c e p l a n e :
" << p << e n d l ;
// E r g e b n i s s e aufsummieren ( z u r Bestimmung d e s M i t t e l w e r t s )
sum_x += p [ 1 ] ; sum_y += p [ 2 ] ; ++n ;
}
40
41
42
86
i f (n > 0)
p r i n t f ( " C e n t r o i d a t %8.6 f mm, %8.6 f mm. \ n " , sum_x/n , sum_y/n ) ;
Listing A.1: Raytracing in C++ (Hauptteil von spot.cpp)
87
Abbildung A.1: Aufbau zur Untersuchung des Systems mit 4 Parabolspiegeln...
Abbildung A.2: ... und seine Umsetzung im Labor.
B Neue Erkenntnisse
Die Untersuchungen wurden nach Abschluss der Diplomarbeit fortgesetzt. Die bestellten
Off-Axis-Parabolspiegel mit fef f = 1000 mm und D = 150 mm wurden geliefert und im
Labor untersucht. Es wurde eine räumliche Auflösung von 35 lp/mm gemessen. Aufgrund
von Oberflächenfehlern und Justierungenauigkeiten bleibt dieser Wert hinter den aus der
Simulation des idealen Systems erwarteten 150 lp/mm zurück. Aus den Toleranzrechnungen wurden in ungünstigen Fällen etwa 10 lp/mm erwartet. Um die Justage zu verbessern,
wurde der Einfluss der verschiedenen mechanischen Freiheitsgrade auf die Bildqualität einzeln numerisch untersucht und eine Justiervorschrift erstellt, die dabei geholfen hat, die
Auflösung von 35 lp/mm zu erreichen. Diese Auflösung ist für ein System mit einer Apertur von f/6,6 völlig ausreichend (vergleiche Tabelle 6.1). Eine Messung der Zeitauflösung
war im Labor nicht möglich.
Eine teilweise Ersetzung des optischen Transportsystems mit Off-Axis-Parabolspiegeln
ist vorgesehen. Ein Entwurf, bei dem die refraktiven Eingangsoptiken weitgehend unverändert beibehalten werden können, wurde erarbeitet. Es wird eine Verbesserung der
Zeitauflösung um rund 30% erwartet, alternativ kann ein Farbfilter mit einer größeren
Bandbreite verwendet werden. Dieses „Hybridsystem” soll dazu dienen, weitere Erfahrungen im Umgang mit den Spiegeln zu sammeln und den experimentellen Nachweis zu
erbringen, dass die Verwendung geeigneter Spiegel zu besseren Zeitauflösungen führt.
Wenn dieser Schritt erfolgreich verläuft, kann über ein System nachgedacht werden, in
dem ausschließlich Spiegel verwendet werden.
Für ein solches System werden dann auch reflektive Eingangs- und Ausgangsoptiken benötigt (siehe Abschnitt 9.2). Für die Ausgangsoptik wurde ein hoch korrigiertes System
aus zwei oblaten Ellipsoiden gefunden, dass in der Simulation alle Anforderungen erfüllt.
Die räumliche Auflösung ist beugungsbegrenzt, es werden 120 lp/mm erreicht. Jedoch ist
bereits im idealen, simulierten System die Zeitauflösung mit 500 fs (volle Breite der Verteilung der Ankunftszeiten) nicht besonders gut, da die Auflösung des Gesamtsystems
deutlich unter 2 ps bleiben soll. Es wird daher noch nach einem Kompromiss gesucht, der
eine geringere räumliche Auflösung und eine bessere Zeitauflösung erreicht.
Die mit der Streak-Kamera aufgenommene Verteilung kann zum Teil auch bei der Auswertung korrigiert werden, da es einen Zusammenhang zwischen der räumlichen Position
in der abzubildenden Verteilung und der Ankunftzeit gibt. Eine solche Korrektur wird
auch für die Messungen mit dem derzeitigen System angewendet, die Anforderungen an
die Zeitauflösung werden dadurch etwas gelockert.
Im November 2008 wurde festgestellt, dass die seit längerem verwendete Kalibration der
zeitlichen Richtung der Streak-Kamera möglicherweise nicht korrekt durchgeführt wurde.
Die aus der Messung bestimmten Dauern wären demnach um etwa 15% kleiner als der tat-
88
89
sächliche Wert. Dies betrifft die gezeigten zeitlichen Verteilungen in den Kapiteln 2 und 4,
ändert aber nichts an den dort getroffenen Aussagen. Die Simulation der Emission und
des Ladungstransports im Injektor müsste noch einmal mit einer entsprechend größeren
Laserpulslänge wiederholt werden, da die simulierte Verteilung nicht einfach skaliert werden kann. Da diese Simulation jedoch nur für einen qualitativen Vergleich dienen sollte,
wurde sie nicht erneut durchgeführt. Die in Abschnitt 4.3 diskutierte Diskrepanz zwischen
Simulation und Messung der mit dem optischen System erreichbaren Zeitauflösung ist nun
noch größer als bisher angenommen. Falls diese Diskrepanz wie angenommen durch eine
unzureichende Simulation der Dispersion im Glas zustande kommt und die Simulation
der Zeitauflösung von Spiegelsystemen nicht betrifft, sollte sich die Verbesserung durch
die Verwendung von Spiegeln noch deutlicher bemerkbar machen.
Danksagung
Ich bedanke mich bei Prof. Kolanoski und Dr. Husemann für die Betreuung und Begutachtung meiner Arbeit. Mein Dank gilt auch dem gesamten PITZ-Team: Ich habe mich
in meiner Zeit bei euch sehr wohl gefühlt! Ganz herzlich möchte ich daher Frank Stephan
danken, dafür, dass er mich „an Bord“ geholt hat. Bei meiner Arbeit habe ich gute Anleitung aber auch viele Freiräume genossen, besonders bedanken möchte ich mich dafür
bei Jürgen Bähr. Von ganzem Herzen danke ich auch Juliane Rönsch, die mir stets und
unermüdlich mit Rat und Tat zur Seite stand. Stefan Weiße danke ich für ausgezeichnete
technische Unterstützung rund um das Thema Kameras. Bei den Arbeiten im Labor sehr
geholfen haben mir Hartmut Lüdecke und Gerald Koss. Für viele anregende Gespräche
physikalischen und gelegentlich auch nicht-physikalischen Inhalts bedanke ich mich bei
Sakhorn Rimjaem, Marc Hänel, Chase Boulware und Dieter Richter.
Für ihr Vertrauen und ihre Unterstützung danke ich meinen Eltern. Für die erholsamen
Wochenenden im heimischen Kölle danke ich darüber hinaus meinen Geschwistern Nina
und Clemens, und Stefan Thiel.
Auf vielfältige Weise unterstützt und in schwierigen Phasen immer wieder ermutigt haben
mich ganz besonders Judita Mamužić und Sabrina Harzer.
Ihr alle habt zum Gelingen dieser Arbeit beigetragen. Danke!
91