Vorläufige Folien
Werbung

Wissensbasierte Systeme
7. Prädikatenlogik
Syntax und Semantik, Normalformen, Herbrandexpansion
Michael Beetz
Plan-based Robot Control
1
Inhalt
7.1 Motivation
7.2 Syntax und Semantik
7.3 Normalformen
7.4 Reduktion auf Aussagenlogik: Herbrandexpansion
7.5 Ausblick
Plan-based Robot Control
2
7.1.1. Motivation
Man kann schon eine ganze Menge mit Aussagenlogik anfangen. Allerdings ist es ärgerlich,
dass es nicht möglich ist, auf die Struktur der atomaren Aussagen einzugehen.
Beispiel:
Alle Blöcke sind rot“
”
Es gibt einen Block A“
”
Daraus sollte folgen: A ist rot“
”
Mit Aussagenlogik können wir dies aber nicht ausdrücken.
Idee: Wir führen Individuenvariablen, Prädikate, Funktionen . . . ein
; Prädikatenlogik 1. Stufe (PL1)
Plan-based Robot Control
3
7.2.1. Alphabet der Prädikatenlogik 1. Stufe
Symbole:
•
•
•
•
•
Operatoren: ¬,∧,∨,∀,∃, =
Variablen: x, x1, x2, . . . , x0, x00, . . . , y, . . . , z, . . .
Klammersymbole: ( )
Funktionssymbole (z.B. Gewicht, Farbe) (zur Repräsentation von Objekten)
Prädikatensymbole (z.B. Block, Rot) (für Aussagen über Objekten)
Hinweise:
1. Prädikaten- und Funktionssymbole besitzen eine Stelligkeit (Zahl der Argumente).
0-stellige Prädikate: aussagenlogische Atome
0-stellige Funktionen: Konstanten
2. Wir nehmen abzählbar viele Prädikate und Funktionen jeder Stelligkeit an.
3.
=“ wird nicht als Prädikat behandelt!
”
Plan-based Robot Control
4
7.2.2. Grammatik der Prädikatenlogik 1. Stufe (1)
Terme (stehen für Objekte):
1. Jede Variable ist ein Term.
2. Wenn t1, t2, . . . , tn Terme sind und f ein n-stelliges Funktionssymbol, dann ist f (t1, t2, . . . , tn) auch
ein Term.
Terme ohne Variablen: Grundterme
Atomare Formeln (stehen für Aussagen über Objekten)
1. Wenn t1, t2, . . . , tn Terme sind und P ein n-stelliges Prädikat ist, dann ist P (t1, t2, . . . , tn) eine
atomare Formel.
2. Wenn t1 und t2 Terme sind, dann ist t1 = t2 eine atomare Formel.
Atomare Formeln ohne Variablen: Grundatome.
Plan-based Robot Control
5
7.2.3. Grammatik der Prädikatenlogik 1. Stufe (2)
Formeln:
1. Jede atomare Formel ist eine Formel.
2. Wenn ϕ und ψ Formeln sind und x eine Variable ist, dann sind ¬ϕ, ϕ∧ψ, ϕ∨ψ, ϕ ⇒ ψ, ϕ ⇔ ψ, ∃ x ϕ
und ∀ x ϕ auch Formeln.
∀, ∃
binden so stark wie ¬.
Die Aussagenlogik ist eine Teilsprache der PL1:
1. Atomare Formeln: nur 0-stellige Prädikate
2. Weder Variablen noch Quantoren.
Plan-based Robot Control
6
7.2.4. Notation
Klammern zur Strukturierung
Verwendung anderer Klammern zwecks Leserlichkeit {, }, [, ].
Prädikate: Person, Schön, älter-als
Funktionen: Vater-von, Nachfolger, a, b
Variablen: x, y, z,
Geschachtelte Quantoren: ∀x∀y . . . auch ∀x, y . . .
Plan-based Robot Control
7
7.2.5. Alternative Notation:
hier
¬ϕ
ϕ∧ψ
ϕ∨ψ
ϕ⇒ψ
ϕ⇔ψ
∀xϕ
∃xϕ
Plan-based Robot Control
sonst
∼ϕ
ϕ
ϕ&ψ
ϕ·ψ
ϕ, ψ
ϕ|ψ
ϕ; ψ
ϕ+ψ
ϕ→ψ
ϕ⊃ψ
ϕ↔ψ
ϕ≡ψ
V
(∀x)ϕ
xϕ
W
(∃x)ϕ
xϕ
8
7.2.6. Bedeutung von PL1-Formeln
Unser Beispiel:∀x[Block(x) ⇒ Rot(x)], Block(a)
Für alle Objekte x gilt: Falls x ein Block ist, dann ist x rot. a ist ein Block.
Generell:
• Terme werden als Objekte interpretiert.
• Universell quantifizierte Variablen laufen über alle Objekte des Universums.
• Existentiell quantifizierte Variablen stehen für ein Objekt des Universums (das den
quantifizierten Ausdruck wahr macht).
• Prädikate stehen für Teilmengen des Universums.
Ähnlich wie für Aussagenlogik definieren wir: Interpretationen, Erfüllung, Modelle, Allgemeingültigkeit, Folgerung, . . .
Plan-based Robot Control
9
7.2.7. Semantik von PL1: Interpretationen
Interpretation: I = hD, ·I,αi mit D eine beliebige nicht-leere Menge und ·I,α eine
Funktion, die
• n-stellige Funktionssymbole auf Funktionen über D abbildet: f I ∈ [Dn → D]
• Individuenkonstanten auf Elemente aus D abbildet: aI ∈ D
• n-stellige Prädikatensymbole auf Relationen über D abbildet: P I ⊆ Dn
Interpretation von Grundtermen:
I
(f (t1, . . . , tn)) = f I (t1I , . . . , tnI ) (∈ D)
Erfüllung von Grundatomen P (t1, . . . , tn):
I |= P (t1, . . . , tn) gdw. ht1I , . . . , tnI i ∈ P I
Plan-based Robot Control
10
7.2.8. Beispiel 1
D
=
{d1, . . . , dn | n > 1}
aI
=
d1
bI
=
d2
cI
=
...
BlockI
=
{d1}
RotI
=
D
I
|= Rot(b)
I
6|= Block(b)
Plan-based Robot Control
11
7.2.9. Beispiel 2
D
=
{1, 2, 3, . . . }
1I
=
1
2I
=
..
2
EvenI
=
{2, 4, 6, . . . }
succI
=
{(1 7−→ 2), (2 7−→ 3), . . . }
I
|= Even(2)
I
6|= Even(succ(2))
Plan-based Robot Control
12
7.2.10. Semantik von PL1: Variablenbelegung
V Menge aller Variablen. Funktion α : V → D.
Notation: α[x/d] ist identisch mit α bis auf die Stelle x. Für x gilt: α[x/d](x) = d.
Interpretation von Termen unter I, α:
xI,α = α(x)
aI,α = aI
I,α
(f (t1, . . . , tn))
= f I (t1I,α, . . . , tnI,α)
Erfüllbarkeit von atomaren Formeln:
I, α |= P (t1, . . . , tn) gdw. ht1I,α, . . . , tnI,αi ∈ P I
Plan-based Robot Control
13
7.2.11. Beispiel
α
=
{(x 7−→ d1), (y 7−→ d2)}
I, α |= Rot(x)
I, α[y/d1] |= Block(y)
Plan-based Robot Control
14
7.2.12. Semantik von PL1: Erfüllbarkeit
Eine Formel ϕ wird von einer Interpretation I unter einer Variablenbelegung α erfüllt,
d.h. I, α |= ϕ:
I, α |= >
I, α 6|= ⊥
I, α |= ¬ϕ gdw. I, α 6|= ϕ
...
und alle weiteren propositionalen Regeln sowie
I |= P (t1, . . . , tn) gdw. ht1I,α, . . . , tnI,αi ∈ P I
I, α |= ∀x ϕ gdw. für alle d ∈ D gilt I, α[x/d] |= ϕ
I, α |= ∃x ϕ gdw. es gibt ein d ∈ D mit I, α[x/d] |= ϕ
Plan-based Robot Control
15
7.2.13. Beispiel
Θ
=
D
=
{d1, . . . , dn} n > 1
I
=
d1
I
=
d2
I
=
{d1}
I
=
D
α
=
{(x 7−→ d1), (y 7−→ d2)}
a
b
Block
Rot
Block(a), Block(b)
∀x (Block(x) ⇒ Rot(x))
Fragen:
1. I, α |= Block(b) ∨ ¬Block(b)?
2. I, α |= Block(x) ⇒ (Block(x) ∨ Block(y))?
3. I, α |= Block(a) ∧ Block(b)?
4. I, α |= ∀x (Block(x) ⇒ Rot(x))?
5. I, α |= Θ?
Plan-based Robot Control
16
7.2.14. Freie und gebundene Variablen
∀x[R( y , z ) ∧ ∃y{¬P (y, x) ∨ R(y, z )}]
Eingekästelte Vorkommen von y und z sind frei. Alle anderen Vorkommen von x, y, z sind
gebunden.
Formeln, in denen keine freien Variablen vorkommen, heien geschlossene Formeln oder
auch Sätze. Bei der Formulierung von Theorien benutzen wir nur geschlossene Formeln.
Beachte: Die Begriffe logische Äquivalenz, Erfüllbarkeit, Folgerbarkeit usw. sind bei geschlossenen Formeln unabhängig von der Variablenbelegung α (d.h. man kann immer über
alle Variablenbelegungen gehen).
Bei geschlossenen Formeln wird dann α auf der linken Seite des Modellbeziehungszeichens
weggelassen:
I |= ϕ
Plan-based Robot Control
17
7.2.15. Terminologie
Eine Interpretation I heit Modell von ϕ unter α, wenn
I, α |= ϕ.
Eine Formel ϕ der PL1 kann, ebenso wie in der Aussagenlogik) erfüllbar, unerfüllbar,
falsifizierbar oder allgemeingültig sein.
Analog sind zwei Formeln logisch äquivalent (ϕ ≡ ψ), wenn für alle I, α gilt:
I, α |= ϕ gdw. I, α |= ψ
Beachte: P(x) 6≡ P(y)!
Auch logische Folgerbarkeit ist analog zu propositionaler Logik.
Frage: Wie können wir einen Ableitungsbegriff definieren?
Plan-based Robot Control
18
7.3.1. Pränex-Normalform
Wegen der Quantoren können wir nicht direkt die KNF einer Formel bilden.
Erster Schritt: Bilden der Pränex-Normalform
Quantorenpräfix + (quantorenfreie) Matrix ϕ:
∀ x1 ∀ x2 ∃ x3 . . . ∀ xn ϕ
Plan-based Robot Control
19
7.3.2. Äquivalenzen für die Erzeugung der Pränex-Normalform
(∀xϕ) ∧ ψ
≡ ∀x(ϕ ∧ ψ) x nicht frei in ψ
(∀xϕ) ∨ ψ
≡ ∀x(ϕ ∨ ψ) x nicht frei in ψ
(∃xϕ) ∧ ψ
≡ ∃x(ϕ ∧ ψ) x nicht frei in ψ
(∃xϕ) ∨ ψ
≡ ∃x(ϕ ∨ ψ) x nicht frei in ψ
∀xϕ ∧ ∀xψ
≡ ∀x(ϕ ∧ ψ)
∃xϕ ∨ ∃xψ
≡ ∃x(ϕ ∨ ψ)
¬∀xϕ ≡ ∃x¬ϕ
¬∃xϕ ≡ ∀x¬ϕ
. . . und aussagenlogische Äquivalenzen
Plan-based Robot Control
20
7.3.3. Erzeugen der Pränex-Normalform
1. Eliminierung von ⇒ und ⇔
2. ¬ nach innen
3. Quantoren nach auen
Beispiel: ¬∀x [(∀x P (x)) ⇒ Q(x)] ; ¬∀x [¬(∀x P (x)) ∨ Q(x)] ; ∃x [(∀x P (x)) ∧ ¬Q(x)]
Und nun?
Lösung: Variablenumbenennung
ϕ[x/t] entsteht aus ϕ, indem alle freien Vorkommen von x in ϕ durch den Term t ersetzt
werden.
Lemma: Sei y eine Variable, die nicht in ϕ vorkommt. Dann gilt ∀ x ϕ ≡ ∀ y ϕ[x/y] und
∃ x ϕ ≡ ∃ y ϕ[x/y].
Satz: Es existiert ein Algorithmus, der zu jeder Formel ihre Pränex-Normalform berechnet.
Plan-based Robot Control
21
7.4.1. Ableitungen in PL1
Was nutzt uns die Pränex-Normalform?
Leider gibt es nicht wie für die propositionalen Logik einfache Gesetze, die uns erlauben,
Erfüllbarkeit oder Allgemeingültigkeit zu bestimmen (durch Umformung in DNF oder KNF).
Aber: Wir können das Erfüllbarkeitsproblem der Prädikatenlogik auf Erfüllbarkeit in propositionaler Logik reduzieren. I.allg. entstehen dabei allerdings unendliche Mengen von
propositionalen Formeln.
Dann: Anwenden von Resolution.
Plan-based Robot Control
22
7.4.2. Skolemisierung
Idee: Eliminierung der Existenzquantoren durch Funktionen, die uns das richtige”’ Element
”
liefern.
Satz (Skolem-Normalform): Sei ϕ eine geschlossene Formel in Pränex-Normalform, so dass
alle quantifizierten Variablen paarweise verschieden sind und die Funktionssymbole g1, g2, . . .
nicht in ϕ auftreten. Sei
ϕ = ∀ x1 . . . ∀ xi ∃ y ψ,
dann ist ϕ erfüllbar gdw.
ϕ0 = ∀ x1 . . . ∀ xi ψ[y/gi(x1, . . . , xi)]
erfüllbar ist.
Beispiel: ∀ x ∃ y [P (x) ⇒ Q(y)] ; ∀ x [P (x) ⇒ Q(g(x))]
Plan-based Robot Control
23
7.4.3. Skolem-Normalform
Skolem-Normalform: Pränex-Normalform ohne Existenzquantoren. Schreibweise: ϕ∗ ist
SNF von ϕ.
Satz: Zu jeder geschlossen Formel ϕ kann ihre SNF ϕ∗ effektiv berechnet werden.
Beispiel:
∃x ((∀x P (x)) ∧ ¬Q(x)) weiter geht’s so:
∃y ((∀x P (x)) ∧ ¬Q(y))
∃y (∀x (P (x) ∧ ¬Q(y)))
∀x (P (x) ∧ ¬Q(g0))
Beachte: Diese Transformation ist keine Äquivalenztransformation, sie erhält nur Erfüllbarkeit!
Beachte: . . . und sie ist nicht eindeutig.
Beispiel: ∃x (p(x)) ∧ ∀y (q(y))
Plan-based Robot Control
24
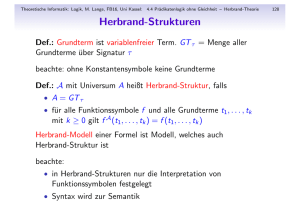
7.4.4. Grundterme, Herbrandexpansion
Die Grundtermmenge (oder das Herbranduniversum) über einer Menge von SNF-Formeln
Θ∗ ist die (abzählbare) Menge aller Grundterme, die sich mit Symbolen aus Θ∗ bilden lassen
(falls es kein Konstantensymbol gibt, wird eines hinzugefügt). Diese Menge wird mit D(Θ∗)
bezeichnet ; repräsentative Trägermenge.
Die Herbrandexpansion E(Θ∗) ist die Instantiierung der Matrizen ψi aller Formeln in Θ∗
durch alle Terme t ∈ D(Θ∗):
E(Θ∗) = {ψi[x1/t1, . . . , xn/tn] | (∀ x1, . . . , xn ψi) ∈ Θ∗, tj ∈ D(Θ∗)}
Satz (Herbrand): Sei Θ∗ eine Menge von Formeln in SNF. Dann ist Θ∗ erfüllbar gdw.
E(Θ∗) erfüllbar ist.
Beachte: Falls D(Θ∗) und Θ∗ endlich, dann ist die Herbrandexpansion endlich ; endliche aussagenlogische
Theorie
Plan-based Robot Control
25
7.4.5. Unendliche aussagenlogische Theorien . . .
Gibt es bei unendlichen Formelmengen endliche Beweise?
Satz (Kompaktheit der Aussagenlogik): Jede (höchstens abzählbare) Menge von Formeln
der Aussagenlogik ist erfüllbar genau dann, wenn jede endliche Teilmenge erfüllbar ist.
Korollar: Eine (höchstens abzählbare) Menge von Formeln der Aussagenlogik ist unerfüllbar
genau dann wenn bereits eine endliche Teilmenge unerfüllbar ist.
Korollar (Kompaktheit der PL1): Jede (höchstens abzählbare) Menge von Formeln der
Prädikatenlogik ist erfüllbar genau dann, wenn jede endliche Teilmenge erfüllbar ist.
Plan-based Robot Control
26
7.4.6. Rekursive Aufzählbarkeit und Entscheidbarkeit
Es lässt sich ein Semi-Entscheidungsverfahren für Allgemeingültigkeit konstruieren, d.h. wir
könnten einen (ziemlich ineffizienten) Algorithmus angeben, der Schritt für Schritt alle
allgemeingültigen Formeln aufzählt.
Satz: Die Menge der allgemeingültigen (und unerfüllbaren) Formeln in PL1 ist rekursiv
aufzählbar.
Wie sieht es mit den erfüllbaren Formeln aus?
Satz (Unentscheidbarkeit von PL1): Es ist unentscheidbar ob eine Formel der PL1 allgemeingültig ist.
(Beweis durch Reduktion des Postschen Korrespondenzproblems.)
Korollar: Die Menge der erfüllbaren Formeln in PL1 ist nicht rekursiv aufzählbar.
Mit anderen Worten: Falls eine Formel allgemeingültig ist, können wir dafür auch effektiv eine Bestätigung
finden. Ansonsten können wir u.U. in eine Endlosschleife geraten.
Plan-based Robot Control
27
7.4.7. Ausblick: Mögliche Erweiterungen
PL1 ist zwar sehr ausdrucksstark, aber manchmal möchte man u.U. mehr . . .
• Logik 2. Stufe: auch über Prädikate quantifizieren
∀x, y [(x = y) ⇔ {∀p [p(x) ⇔ p(y)]}]
; Allgemeingültigkeit ist nicht mehr semi-entscheidbar (keine Kompaktheit mehr)
• Lambda-Ausdrücke: Definition von Prädikaten, z.B. λx, y[∃zP (x, z)∧Q(z, y)] definiert neues 2-stelliges
Prädikat.
; lässt sich auf PL1 reduzieren durch Lambda-Reduktion
• Eindeutigkeitsquantor: ∃!x ϕ(x) – es existiert genau ein x . . .
; Reduktion auf PL1:
∃x [ϕ(x) ∧ ∀y {ϕ(y) ⇒ x = y}]
Plan-based Robot Control
28
7.4.8. Ausblick: Verarbeitung
• PL1-Resolution: Statt Resolution auf der Herbrandexpansion wird Resolution über
Klauseln mit Variablen durchgeführt. ; Unifikation, ; Resolution über Klassen von
Grundinstanzen
• Einschränkung der syntaktischen Form: Nur Horn-Klauseln ; PROLOG ; erheblich
effizientere Methoden
• Endliche Theorien: In Anwendungen hat man oft eine endliche Menge von Objekten
vorgegeben. Domain closure axiom:
∀x[x = c1 ∨ x = c2 ∨ . . . ∨ x = cn]
Übersetzung in endliche aussagenlogische Form möglich.
Plan-based Robot Control
29
7.5. Zusammenfassung
• PL1 erlaubt es, Aussagen zu strukturieren und gibt uns damit eine erheblich gröere
Aussagekraft als Aussagenlogik.
• Formeln bestehen aus Termen und atomaren Formeln, die mit Hilfe von Konnektoren
und Quantoren zu Formeln zusammengesetzt werden können.
• Interpretationen in PL1 bestehen aus einem Universum und der Interpretationsfunktion.
• Der Satz von Herbrand zeigt, dass Erfüllbarkeit in PL1 auf Erfüllbarkeit in Aussagenlogik
reduziert werden kann (allerdings entstehen dabei u.U. unendliche Formelmengen).
• Aber: Allgemeingültigkeit in PL1 ist nicht entscheidbar!
Plan-based Robot Control
30