Grundlagen der Bioinformatik
Werbung

modlab
Grundlagen der Bioinformatik
Ergänzende Unterlagen zu ausgewählten Kapiteln
Prof. Dr. G. Schneider
erstellt u.M.v.
Markus Hartenfeller, Jan A. Hiß, Michael Meissner,
Ewgenij Proschak, Michael Schmuker, Yusuf Tanrikulu,
Martin Weisel, Matthias Wirth
© modlab® 2007
© modlab® 2007
Inhaltsverzeichnis
INHALTSVERZEICHNIS...................................................................................................... 3
SEQUENZALIGNMENT........................................................................................................ 5
PAARWEISES ALIGNMENT ....................................................................................................... 7
HEURISTIKEN FÜR LOKALES ALIGNMENT .............................................................................. 10
SIGNIFIKANZ LOKALER ALIGNMENTS .................................................................................... 14
MULTIPLES ALIGNMENT........................................................................................................ 15
Heuristiken für multiple Alignments ................................................................................ 17
LITERATUR ............................................................................................................................ 20
AUTOKORRELATIONSVEKTOREN............................................................................... 21
MATHEMATISCHE DEFINITION .............................................................................................. 22
TRANSFER IN DIE CHEMIEINFORMATIK .................................................................................. 23
Beispiel ............................................................................................................................. 25
ANWENDUNG VON KORRELATIONSVEKTOREN ...................................................................... 26
LITERATUR ............................................................................................................................ 27
NIPALS-ALGORITHMUS ................................................................................................... 29
PRINZIP UND SCHRITTE DES ALGORITHMUS .......................................................................... 30
LITERATUR ............................................................................................................................ 31
GRUNDLAGEN GRAPHENTHEORIE ............................................................................. 33
Graphen............................................................................................................................ 33
Subgraphen, Pfade, Zyklen, Cliquen ................................................................................ 35
GRAPHENTHEORETISCHE PROBLEME UND IHRE LÖSUNGEN IN DER CHEMINFORMATIK ......... 36
Subgraph-Isomorphismus................................................................................................. 36
Maximum Common Substructure ..................................................................................... 40
Cliquendetektion auf dem Assoziationsgraphen .............................................................. 41
LITERATUR ............................................................................................................................ 45
KÜNSTLICHE NEURONALE NETZE .............................................................................. 47
Genereller Aufbau von Feed-Forward-Netzen ................................................................ 47
DAS PERZEPTRON .................................................................................................................. 48
Das Single Layer Perzeptron ........................................................................................... 48
Die Lösung des XOR-Problems........................................................................................ 51
MEHRLAGIGE NETZE ............................................................................................................. 52
NETZTRAINING ...................................................................................................................... 53
PROBLEME UND LÖSUNGSANSÄTZE....................................................................................... 58
LITERATUR ............................................................................................................................ 61
PARTIKELSCHWARM-OPTIMIERUNG (PSO)............................................................. 63
DER ALGORITHMUS............................................................................................................... 64
ZUSAMMENFASSUNG ............................................................................................................. 66
LITERATUR ............................................................................................................................ 67
AMEISENALGORITHMEN................................................................................................ 69
AMEISENALGORITHMEN IN DER ANWENDUNG ...................................................................... 70
LITERATUR ............................................................................................................................ 72
© modlab® 2007
© modlab® 2007
Sequenzalignment
5
Sequenzalignment
Die ersten Algorithmen zur Sequenzanalyse wurden in den 50er Jahren des 20. Jahrhunderts
erdacht, als die ersten Proteinsequenzen bekannt wurden. Mit der von Fred Sanger
entwickelten Methode zur Sequenzierung von DNA (Kettenabbruchreaktion, 1975) wurden
zudem schnell große Anzahlen an Nukleotidsequenzen verfügbar. Die hier vorgestellten
Alignment-Algorithmen dienen dem Vergleich und der Analyse von Sequenzalignments und
werden verwendet, um die strukturelle, funktionelle oder evolutionäre Verwandtschaft von
DNA- oder Proteinsequenzen aufzuklären.
Das
Ausrichten
zweier
Sequenzen
gelingt
beim
paarweisen
Alignment
durch
Gegenüberstellung von gleichartigen Positionen (Matches) oder möglichst ähnlichen
Positionen (Mismatches) und dem Einfügen von Lücken (Gaps) an den Stellen, an denen sich
die Sequenzen durch Punktmutationen (Substitutionen, Insertionen oder Deletionen)
unterscheiden. Dabei finden Scoring-Matrizen Anwendung, die überwiegend aus multiplen
Alignments bekannter homologer Sequenzen abgeleitet wurden und konservierten oder sehr
ähnlichen Positionen positive Werte (Scores) zuweisen, während unähnliche Positionen meist
negative Werte erhalten (es gibt auch Scoring-Matrizen, die auf physikochemischen
Eigenschaften beruhen und nicht aus Alignments abgeleitet wurden). Die Bestrafung von
Lücken erfolgt durch die Gap-Funktion γ (Formel 1), die negativ in den Score eines
Alignments eingeht. Dabei finden meist „affine“ Gap-Penalties Verwendung, bei denen ein
langes Gap weniger schlecht bewertet wird, als mehrere kurze. Dies gelingt dadurch, dass die
erste Stelle eines Gaps der Länge g mit einer Gap-Open-Penalty d stärker bestraft wird als die
restlichen Positionen der gleichen Lücke, die mit der Gap-Extension-Penalty (Formel 1) e
bestraft werden (d > e).
© modlab® 2007
Sequenzalignment
γ(g) = d + (g-1) · e.
6
(1)
(Die lineare Gap-Penalty kann als Sonderfall der affinen Gap Penalty angesehen werden ,
wobei d = e.)
Bewertung eines Alignments am Beispiel:
Für die beiden DNA-Sequenzen TAAACAC und TGCATAC schlagen wir folgendes Alignment
vor:
TAA__ACAC
T__GCATAC
Wenn wir jeden Match mit +1 belohnen, jeden Mismatch mit –m und jeden Gap mit obiger
affiner Gap-Penalty γ bestrafen, erhält unser Alignment einen Score von 4 – m –2d – 2e. Wie
bereits erwähnt, werden üblicherweise Scoring-Matrizen verwendet, die Matches positive
Scores zuweisen, während Mismatches meist negative Werte erhalten. Dabei sorgt eine
Konvention dafür, dass ein Mismatch nicht strenger bestraft wird als zwei einzelne GapPositionen, durch die man den Mismatch vermeiden könnte.
Während das optimale paarweise Alignment in Laufzeit O(n²) relativ schnell (aber oft immer
noch zu langsam für eine effiziente Datenbanksuche) berechnet werden kann, ist das optimale
multiple Alignment mit O(nk) (k = Anzahl der Sequenzen) nicht mehr effizient zu berechnen.
Hier finden Heuristiken (CLUSTAL W, Feng & Doolittle Ansatz) Verwendung, die
paarweises Alignment mit phylogenetischen Methoden kombinieren. So werden von den
Sequenzen ausgehend phylogenetische Bäume erstellt und die einander ähnlichsten
Sequenzen in paarweisen Alignments vereinigt, die wiederum zum fertigen multiplen
Alignment zusammengesetzt werden.
Im nun folgenden Abschnitt sollen Algorithmen zum paarweisen Alignment betrachtet
werden.
© modlab® 2007
Sequenzalignment
7
Paarweises Alignment
Globales Alignment
Wir haben zwei Sequenzen x,y der Länge n,m gegeben und vermuten, dass diese miteinander
verwandt sind. Um nicht alle exponentiell viele Alignments berechnen zu müssen, benutzen
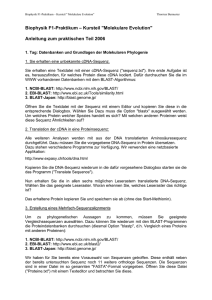
wir einen dynamischen Programmierungsansatz: Der Needleman-Wunsch-Algorithmus
(1970) liefert uns optimale globale Alignment in Laufzeit O(n · m). Dazu erstellen wir uns
einen (n × m) Alignmentgraphen, in dem wir in allen Feldern je drei Kanten beschriften (Abb.
1).
Die mit Di,j beschrifteten diagonalen Kanten repräsentieren einen Match bzw. einen Mismatch
zwischen den jeweiligen Positionen i,j in den Sequenzen x,y und werden mit den zugehörigen
Scores S beschriftet. Die vertikalen bzw. horizontalen Kanten (V, H) repräsentieren jeweils
einen Gap in der ersten bzw. zweiten Sequenz. Indem wir uns bereits errechnete Scores der
besten Sequenzanfänge merken und mit dynamischen Programmieren weitergeben, erhalten
wir die o.g. Laufzeitbeschleunigung. So trägt jede mit Di,j beschriftete Kante den Score des
besten Alignments bis zu dieser Stelle (Formel 2, hier ausgehend von Di+1,j+1).
Di+1,j+1 = S(xi+1, yj+1) + max {Di,j + Vi,j + Hi,j}
x1
x2
(2)
xn
H1,0
y1 V0,1 D1,1
xi
y2
yj
Di,j
Hi,j
yj+1
ym
xi+1
Vi,j
Hi+1,j
Vi,j+1 Di+1,j+1
Dn,m Vn,m
Hn,m
Abbildung 1: Die Kanten des Alignmentgraphen tragen den Score des besten Alignments bis
zu dieser Stelle.
© modlab® 2007
Sequenzalignment
8
Bei den Rekursionen für horizontale und vertikale Kanten werden keine Scores verteilt, da
Gaps keine Beiträge zum Alignment liefern. An dieser Stelle fließen jedoch die Gap-Openoder Gap-Extension-Penalties (d,e) ein (Formel 3).
Hi+1,j = max {Di,j - d, Vi,j - d, Hi,j - e}
(3)
Nachdem wir alle Kanten beschriftet haben, erhalten wir den Score des optimalen globalen
Alignments (Formel 4).
S* = max {Dn,m, Vn,m, Hn,m}
(4)
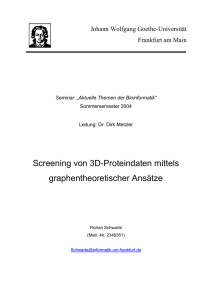
Den dazugehörigen Pfad erhalten wir per Traceback über die maximalen Kanten. Das
bedeutet wir laufen die Kanten rückwärts bis zum Start und entscheiden uns jeweils für die
Kante, die den maximalen Beitrag zum Score geliefert hat (Abb. 2).
S*
Abbildung 2: Der Traceback über die Kanten mit den maximalen Beschriftungen liefert den
Pfad zum optimalen Alignment.
Ein Wort zur Laufzeit: Wir beschriften insgesamt 3·n·m Kanten und benötigen für den
Traceback maximal n+m Kanten und bleiben mit 3·n·m +n+m asymptotisch in O(n·m).
Lokales Alignment
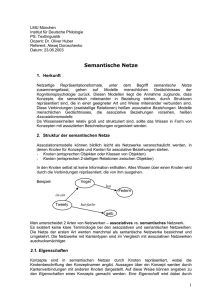
Wenn wir vermuten, dass nur ein Teil (xk,...,xi) einer Sequenz x mit einem Teil (yl,...,yj) einer
Sequenz y übereinstimmt, verwenden wir den Smith-Waterman-Algorithmus (1981), der das
optimale lokale Alignment für die beiden Sequenzen in O(n·m) findet. Diese Suchstrategie
wird z.B. verwendet, wenn wir eine Sequenz gegen eine ganze Datenbank alignieren möchten
oder überprüfen wollen, ob z.B. ein Hefeprotein irgendwo im Humangenom vorkommt.
© modlab® 2007
Sequenzalignment
9
Wir benutzen wieder die affine Gap-Penalty und beschriften die Kanten Di,j, Hi,j, Vi,j wie beim
Needleman-Wunsch-Algorithmus, jedoch mit folgendem Unterschied: Wir geben jeder Kante
die Möglichkeit, ein neues lokales Alignment mit Score ≥ 0 zu starten. Das bedeutet, dass
eine Kante nicht ein möglicherweise negatives Erbe von schlechten Sequenzanfängen
weiterführen muss, sondern stets ein neues lokales Alignment starten kann. Mit anderen
Worten: Die Teile die außerhalb des optimalen lokalen Alignments liegen, gehen nicht
negativ in den Score ein (Abb. 3).
xk...
...xi
y.l
..
...
yj
Abbildung 3: Das optimale lokale Alignment – kein anderes lokales Alignment erreicht einen
größeren Score.
Die Rekursionen ändern sich wie folgt (Formeln 5, 6, 7):
Di+1,j+1 = max {0, Di,j + S(xi+1, yj+1), Hi,j + S(xi+1, yj+1), Vi,j + S(xi+1, yj+1)} (5)
Hi+1,j = max {0, Di,j - d, Hi,j - e, Vi,j - d}
(6)
Vi,j+1 = max {0, Di,j - d, Hi,j - d, Vi,j - e}
(7)
Das optimale lokale Alignment erhalten wir per Traceback über die Kanten, die den
maximalen Beitrag geliefert hatten. Dabei haben wir uns während des Beschriftens der
Kanten den maximalen Score gemerkt und gehen von dieser Kante (nicht von Dn,m, Hn,m oder
Vn,m wie beim Needleman-Wunsch-Algorithmus) nach links oben vor, bis wir eine Kante
erreichen, die den Score 0 trägt. Der Teil zwischen dem Score 0 und dem maximalen Score ist
unser lokal optimales Alignment.
Laufzeit und Speicherplatz betragen wie beim Needleman-Wunsch-Algorithmus O(n·m), was
deutlich besser ist, als exponentielle Laufzeit, aber für die Suche in großen Datenbanken zu
© modlab® 2007
Sequenzalignment
10
langsam ist. Hier finden die Heuristiken BLAST oder FASTA Anwendung, die zwar nicht
unbedingt das optimale lokale Alignment finden, dafür aber deutlich schneller laufen und
meist gute Ergebnisse liefern.
Heuristiken für lokales Alignment
BLAST (Basic Local Alignment Search Tool)
BLAST ist eine Heuristik für lokale Alignments, die mit einer Laufzeit von O(n+m) deutlich
schneller ist als der Needleman-Wunsch-Algorithmus, jedoch nicht in jedem Fall das optimale
lokale Alignment findet.
Gegeben seien eine kürzere Sequenz S der Länge m und eine lange Sequenz T mit Länge n,
gegen die S in einem (oder mehreren) lokalen Alignment(s) aligniert werden soll. Dazu wird
S in kleine Teilwörter zerteilt (Default: Wortlänge |w| = 3 bei Proteinen, |w| = 11 bei
Nukleinsäuren). Hierbei fügt BLAST auch ähnliche Wörter hinzu, deren Score einen
bestimmten Schwellenwert t überschreiten (diese leicht veränderten Suchwörter stehen für
Mutationen, die sich während des Evolutionsprozesses eingeschlichen haben könnten). Aus
diesen Teilwörtern lässt sich ein Schlüsselwortbaum so konstruieren, dass die lange Sequenz
T fast in linearer Zeit durch den Suchbaum aus den Fragmenten des Suchstrings S geschoben
werden kann. Dies gelingt dadurch, dass die Suchmuster so in den Baum eingefügt werden,
dass sie sich erst aufspalten, wenn sie sich unterscheiden. Z.B. für Sequenz S = KLLGV
(Abb. 4).
L
G
V
L
L
G
K
L
Abbildung 4: Schlüsselwortbaum für Sequenz S.
© modlab® 2007
Sequenzalignment
11
So kann man im Fall eines Mismatches bei der Mustersuche direkt an die richtige Stelle eines
anderen
Musters
mit
gleichem
Präfix
springen.
Dies
bringt
die
gewünschte
Laufzeiteinsparung (Vergleiche hierzu auch weiterführende Literatur. Stichwort: „AhoCorasick-Algorithmus“).
Wir schieben nun den langen Text T durch den Suchbaum und geben alle Matches aus (alle
Fragmente mit Score ≥ t). Diese lassen sich in einem Alignmentgraphen (Dotplot) darstellen
und repräsentieren Stücke, die in beiden Sequenzen identisch (bzw. ähnlich im Falle der
zusätzlich eingefügten Strings mit Score ≥ t) sind. In einem weiteren Schritt verlängern wir
diese gefundenen Alignments entlang der Diagonalen zu sogenannten HSPs (High Scoring
Segment Pairs). Diese sind so definiert, dass sie sich durch Verlängern oder Verkürzen in
ihrem Score nicht mehr verbessern lassen. Wir können uns nun eine Reihe guter lokaler
Alignments ausgeben lassen, die einen bestimmten Mindestscore überschreiten oder einfach
das MSP (Maximum Scoring Segment Pair) betrachten. Wie schon angedeutet findet BLAST
nicht unbedingt das optimale lokale Alignment, liefert aber meist sehr gute Ergebnisse. Die
Laufzeit ist mit O(n+m) deutlich schneller als beim Smith-Waterman-Algorithmus.
Anmerkung: In der klassischen BLAST Version werden HSPs nur entlang der Diagonalen
verlängert. Beim sog. GAPPED BLAST werden nur solche HSPs betrachtet, die (innerhalb
eines begrenzten Abstands zueinander) auf einer gemeinsamen Diagonalen liegen, dass heißt
einem gemeinsamen gaplosen Alignment angehören. Zwischen diesen HSPs suchen wir nun
nach örtlichen Exkursionen, die unsere beiden HSPs mit einem weiteren HSP über Gaps
verbinden kann (Abb. 5).
Sequenz 1
Abbildung 5: Gapped BLAST: einzelne HSPs werden über Gaps verbunden, wenn sich
dadurch der Score verbessern lässt.
© modlab® 2007
Sequenzalignment
12
Um weiter entfernte Sequenzen zu finden empfiehlt sich PSI-BLAST (Position Sensitive
Iterated-BLAST). Hierbei wird aus signifikanten Treffern einer BLAST-Suche ein multiples
Alignment erstellt, aus dem ein Profil abgeleitet werden kann. Im Profil sind die jeweiligen
Wahrscheinlichkeiten für jedes Nukleotid bzw. jede Aminosäure für die jeweilige Position im
Alignment vermerkt. Dieses Profil wird nun zur Datenbanksuche eingesetzt, die
resultierenden signifikanten Treffer wieder aligniert und ein neues (noch variableres) Profil
erstellt. Nach mehreren Iterationen endet das Verfahren. PSI-BLAST findet auch weiter
entfernte Sequenzen (auch < 30% Identität).
Die wichtigsten Datenbanken (Genbank, EMBL und DDBJ) lassen sich allesamt mit BLAST
durchsuchen. Die zahlreichen BLAST-Varianten sind in der BLAST-Suite zusammengefasst:
http://www.ncbi.nlm.nih.gov/blast/producttable.shtml#pstab
Die wichtigsten Varianten:
blastn: zur Suche in Nukleotidsequenzdatenbanken.
blastp: zur Suche in Proteinsequenzdatenbanken.
blastx: Vergleicht eine Nukleotidsequenz (in allen Leserastern
translatiert) gegen eine Proteindatenbank.
tblastn: Vergleicht eine Proteinsequenz gegen eine Nukleotiddatenbank (dynamisch in allen Leserastern translatiert)
tblastx: Vergleicht die six-frame-Translation einer Nukleotidsequenz
gegen die six-frame-Translationen einer Nukleotidsequenzdatenbank.
FASTA
Auch hier soll ein kurzer Text S in einem langen Text T gefunden werden. Wir gehen ähnlich
wie bei BLAST vor und zerteilen Text S in kleinere Bruchstücke. Der Parameter „ktup“
bestimmt hier die Länge der Bruchstücke, die gematcht werden sollen (Default: ktup = 6 für
DNA, 2 für Proteine). Da die Bruchstücke hier kleiner sind als bei BLAST, suchen wir nicht
mit Pattern-Matching-Algorithmen nach Übereinstimmungen, sondern mit dem sog. 'lookup
© modlab® 2007
Sequenzalignment
13
table', einer Hashing-Tabelle. Im Lookup-Table wird das Auftreten aller Aminosäuren bzw.
Nukleotide in der Sequenz T aufgeführt, z.B. für die Sequenz T= A1G2T3A4C5A6 (Tab. 1).
Tabelle 1: Lookup-Table für Sequenz T
Symbol
A
G
T
C
Position
1,4,6
2
3
5
Beginnt ein Suchstring der Länge ktup aus S mit einem 'A', erkennen wir im lookup-table,
dass im Text T ein 'A' an den Positionen 1,4 und 6 auftritt. Steht in S an zweiter Postion ein
'G', prüfen wir, ob es ein 'G' in T an den Positionen 2,5 oder 7 gibt (also ein Zeichen nach den
schon gefundenen 'A's.), usw. Man kann so sehr schnell alle "hotspots" aufspüren. Das sind
genau die Stellen, an denen T und S an mindestens ktup Positionen übereinstimmen. Die
Übereinstimmungen tragen wir in einen Dotplot ein.
Wir können nun die Init1-Scores berechnen, d.h. wir verlängern alle hotspots zu HSPs (s.o.)
entlang der Diagonalen. Danach berechnen wir die Initn-Scores, dass heißt, wir versuchen
lokal die besten n HSPs durch Gaps zu verbinden, s.d. ein noch höherer Alignment-Score
resultiert. Die Breite der Nachbarschaftssuche wird dabei auf einen bestimmten Rahmen
beschränkt: Ausgehend von den Init1's betrachten wir die umliegenden 32 Diagonalen (16
höher, 16 tiefer).
Ein besonderes Merkmal von FASTA ist die anschließende "Exakte Scorebestimmung": Für
den Bereich in dem das Alignment mit dem höchsten Initn-Score wird nochmal ein exaktes
lokales Alignment mit dem Smith-Waterman-Algorithmus berechnet. Dabei ist der
betrachtete Rahmen noch etwas größer als der Bereich in dem das beste Initn-Alignment liegt,
um eventuelle Fehler von FASTA auszugleichen (Abb. 6).
Fazit: BLAST vs. FASTA
BLAST läuft schneller, weil die Suchkriterien hier strenger sind als bei FASTA (FASTA
findet mehr Treffer, wg. Default ktup = 2, während |w| = 3 bei BLAST (für Proteine)). Dafür
findet FASTA aber mit höherer Wahrscheinlichkeit das optimale Alignment, durch
Anwendung des Smith-Waterman-Algorithmus.
© modlab® 2007
Sequenzalignment
14
Sequenz 1
Suchraum um Init1's
Smith-Waterman
Abbildung 6: Exakte Scorebestimmung von FASTA.
Signifikanz lokaler Alignments
Die Signifikanz eines Alignments drückt aus, wie aussagekräftig dessen Score tatsächlich ist:
Ist der Score das Ergebnis eines zufälligen Prozesses oder ist der Score so hoch, dass wir
ausschließen können, dass die Ähnlichkeit der Sequenzen zufällig ist? In diesem Fall gehen
wir davon aus, dass die Sequenzen homolog sind. Hier sollen mit dem Z-Wert, P-Wert und
dem E-Wert drei Maße für Signifikanz vorgestellt werden.
Z-Wert
Ist der Score S unseres Alignments besser als der einer zufällig (aus den gleichen Bausteinen)
zusammengewürfelten Sequenz? Dazu berechnen wir üblicherweise 100 neue Alignments,
dazu den Mittelwert ihrer Scores und die Standardabweichung (Formel 8).
Z-Score von S = (S – Mittelwert) / Standardabweichung
(8)
Ein Z-Wert von ≥ 5 gilt als signifikant. Dies tritt ein, wenn der beobachtete Score deutlich
höher ist, als der Mittelwert der zufällig erstellten Sequenzen. Je höher ein Z-Score, desto
geringer ist dabei die Wahrscheinlichkeit, dass der beobachtete Alignmentscore nur Zufall ist.
Ein Z-Score von 0 bedeutet, dass der beobachtete Score nicht größer ist als der einer
„zufälligen Sequenz“.
© modlab® 2007
Sequenzalignment
15
P-Wert
Hier berechnen wir die Wahrscheinlichkeit für das Ereignis, dass ein so hoher Score wie der
beobachtete Score S zufällig zustande kam (Nullhypothese). Fällt die Wahrscheinlichkeit für
alle Alignments der gleichen Länge, die einen Score S erreichen oder übertreffen unter das
Signifikanzniveau von 5%, verwerfen wir die Nullhypothese und gehen von Homologie der
Sequenzen aus. Das heißt, die Ähnlichkeit der betrachteten Sequenzen ergibt sich durch
gemeinsame Abstammung und nicht durch Zufall.
E-Wert
Der E-Wert (Formel 9) gibt den Erwartungswert für ein unabhängiges Alignment an, dass
dieses einen Score ≥ S erreicht.
E-Wert für S = n · m · k · e-λS
.
(9)
λ und k sind hier Skalierungsfaktoren für die Größe des Suchraums und die gewählte
Scoringmatrix.
Der E-Wert wird besonders häufig zur Bestimmung der Signifikanz von homologen
Alignments verwendet, da er (anders als Z- und P-Wert) Sequenzlängen berücksichtigt. Das
bedeutet, liefern zwei Sequenzen A,B den gleichen Score S und A ist kürzer als B, so hat B
einen deutlich höheren E-Wert (ist also weniger signifikant), da es ja mehr Positionen
benötigt hat, um den Score S zu erreichen. Die unterschiedlichen Sequenzlängen gehen mit
(n·m) in die Formel des E-Wertes ein.
Multiples Alignment
Das multiple Alignment liefert im Gegensatz zum paarweisen Alignment genauere
Informationen über Aminosäureverteilungen an bestimmten Positionen, da sich hieraus
ableiten lässt, wie stark konserviert eine Position tatsächlich ist. Darüberhinaus geben sie
Aufschluss darüber, wie wahrscheinlich der Austausch einer bestimmten Aminosäure durch
© modlab® 2007
Sequenzalignment
16
eine andere ist. Hierauf beruhen z.B. die PAM-Scoring-Matrizen, die sich aus den
Austauschwahrscheinlichkeiten von Aminosäuren aus Alignmentblöcken errechnen lassen.
Zudem lassen sich aus multiplen Alignments von Proteinen einer Familie Profile ableiten, mit
denen man nach weiteren Vertretern dieser Familie suchen kann.
Während für paarweises Alignment effiziente Algorithmen vorhanden sind, ist die
Berechnung des optimalen Alignments für mehr als zwei Sequenzen nicht mehr effizient
möglich. Hier müssten wir den Weg mit optimalem Score durch eine n-dimensionale Matrix
finden, was exponentielle Laufzeit benötigt. Abhilfe schaffen hier Heuristiken für multiple
Alignments.
Scores für multiples Alignment
Der Gesamtscore eines multiplen Alignments m errechnet sich als die Summe der Scores
seiner Spalten i. Zusätzlich gehen hier die Gap-Penalties G negativ ein (Formel 10).
S(m) = G + ∑ S(mi )
(10)
i
Die Scores der einzelnen Spalten lassen sich auf verschiedene Weise berechnen:
Sum of Pair Scores
Hierzu berechnen wir die Scores aller n! möglichen Paare einer Alignmentposition (z.B. mit
PAM- oder BLOSUM-Matrizen). Ein Problem beim Sum of Pair Score ist, dass kleine
evolutionäre Ereignisse überbewertet werden. Ist nämlich nur eine Position einer sonst
konservierten Spalte mutiert, so geht der (meist negative) Score für den Mismatch mit allen
anderen (n-1) Positionen n-1 mal in den Spaltenscore ein.
Entropie-Scores
•
Shannon-Entropie (Formel 11)
| A|
H = −∑ p k log 2 p k , wobei
k=1
© modlab® 2007
(11)
Sequenzalignment
17
|A| = Die Länge des Alphabets (z.B. 20 Aminosäuren)
pk = Die relative Häufigkeit des Elementes k in der betrachteten Spalte
Die Shannon-Entropie ist ein Minimum-Entropie-Score, d. h. eine durchweg
konservierte Spalte (Optimum) erhält den Score 0, während der Score bei immer
größer werdender Unordnung (Entropie) immer größere (positive!) Werte annimmt
(das Maximum ist abhängig von der Größe des Alphabets).
Der sog. Information-Content I (Formel 12) kann als die „reverse“ Shannon-Entropie
aufgefasst werden. Er drückt aus, wie aussagekräftig eine Spalte im multiplen
Alignment ist (je höher der Wert, umso besser).
| A|
I = H max − H act = log 2 | A | +∑ p k log 2 p k .
(12)
k =1
•
Kullbach-Leibler-Distanz (Formel 13)
H(P || Q) = ∑ p k log
k
pk
qk
(13)
Die Kullbach-Leibler-Distanz beschreibt die „Distanz“ zwischen der beobachteten
Häufigkeit pk (also der relativen Häufigkeit einer Aminosäure oder eines Nukleotids k
in der Spalte) und der Hintergrundverteilung qk (der erwarteten Wahrscheinlichkeit für
das Auftreten einer Aminosäure oder eines Nukleotids). Mit anderen Worten: Die
durch einen Mismatch in der Spalte hervorgerufene Entropie wird noch erhöht, wenn
die betreffende Position (AS oder Nukleotid) besonders selten auftritt.
Heuristiken für multiple Alignments
Die Berechnung des optimalen multiplen Alignments von n Sequenzen ist zeitaufwendig. So
ließe sich zwar in einem n-dimensionalen Ansatz ähnlich zum Needleman-WunschAlgorithmus durch die Berechnung der jeweils besten Scores in einer n-dimensionalen Matrix
durch dynamisches Programmieren das optimale multiple Alignment berechnen, jedoch wäre
© modlab® 2007
Sequenzalignment
18
die Laufzeit immer noch exponentiell. Das Problem ist, das jede der n Positionen in einer
Spalte entweder ein Gap oder eine tatsächliche Position (AS oder Nukleotid) sein könnte.
Wenn wir verbieten, dass alle Positionen einer Spalte Gaps sein können, beschert uns dies
immer noch 2n-1 mögliche Kombinationen, deren Scores es über m Spalten hinweg zu
maximieren gilt. Es gibt Branch & Bound-Ansätze, die nicht die Sequenzanfänge aller
Alignments berechnen (wie im Brute-Force-Ansatz), sondern unwahrscheinliche Alignments
von der Berechnung ausschließen. Diese Methoden benötigen jedoch immer noch
exponentielle Laufzeit, auch wenn sie um eine Konstante besser sind. Nachfolgend sollen
zwei Heuristiken vorgestellt werden, die zwar einen Verlust der Genauigkeit in Kauf nehmen,
dabei aber deutlich schneller sind als Brute-Force-Ansätze und dennoch gute Ergebnisse
bringen.
Feng-Doolittle-Algorithmus
Vorgehen:
1.
Aligniere alle Sequenzen paarweise mit dem Needleman-Wunsch-Algorithmus.
2.
Weise allen n-1 Sequenzpaaren Distanzen zu. Der Feng-Doolittle-Algorithmus
berechnet hierzu den sog. „difference score“. Dieser entspricht in etwa dem Reversal
des erhaltenen Scores eines paarweisen Alignments, d.h. je höher der Score des
Alignments, desto niedriger der difference score. So wird eine hohe Ähnlichkeit
zwischen zwei Sequenzen in eine niedrige Distanz übersetzt.
3.
Berechne aus den Distanzen einen phylogenetischen Baum mit UPGMA.
4.
Aligniere längs der Kanten (ausgehend von den Blättern) Sequenz-Paare, SequenzBlock-Paare und Block-Paare (Abb. 7).
Seq 1
Seq 2
Seq 3
Seq 4
Seq 5
Block (1,2)
Block (1,2,3)
Block (4,5)
Block (1,2,3,4,5)
Abbildung 7: Multiples Alignment mit Feng-Doolittle: Aligniere zunächst Blätter
untereinander, dann Blätter gegen Blöcke und schließlich Blöcke untereinander.
© modlab® 2007
Sequenzalignment
19
Zunächst werden je zwei Sequenzen zu einem Block zusammengefügt, und gegen diesen
Block können später weiter Sequenzen oder andere Blöcke aligniert werden. Ein einmal in
einem Block fixiertes Alignment bleibt für das multiple Alignment mit all seinen Gaps nach
der Regel „once gap, always gap“ erhalten. Mit einer Ausnahme: In den fixierten Block kann
ein globales Gap eingefügt werden, um eine weitere Sequenz gegen den Block zu alignieren.
Eine Sequenz, die neu zu einem Block hinzugefügt werden soll, wird zunächst mit allen
Sequenzen des Blocks paarweise aligniert (n-1 viele paarweise Alignments). Die Sequenz
wird dann gemäß des besten paarweisen Alignments in den Block eingefügt. Als Ausgabe
erhalten wir einen Block, der das Alignment aller unserer Sequenzen beinhaltet, also das
multiple Alignment.
CLUSTAL W
Clustal W verfolgt eine ähnliche Strategie wie Feng-Doolittle. Deshalb sollen hier nur die
wesentlichen Unterschiede vorgestellt werden. Zunächst werden auch hier alle paarweisen
Alignments berechnet und Distanzen zugewiesen. Dabei kennt CLUSTAL W neben dem
difference score aus dem Alignment Score wahlweise noch einen heuristischen Ansatz zur
Berechung der Distanzen. So kann die Distanz in einem beschleunigten Verfahren über die
Anzahl der identischen Treffer bei einer ktup-Suche (siehe FASTA) berechnet werden. Aus
den Distanzen wird wieder ein phylogenetischer Baum aufgebaut, hier aber nach der
Neighbor-Joining-Methode. Ausgehend von den Blättern werden nun wieder zunächst
Sequenzen miteinander aligniert. Diese werden aber nicht zu fixierten Blöcken
zusammengefasst, sondern an den Knoten zu Profilen geclustert. Ein Profil ist eine Matrix,
die für jede der 20 Aminosäuren (oder 4 Nukleotide) die relative Häufigkeit ihres Auftretens
an dieser Stelle im multiplen Alignment beinhaltet. Um zu verhindern, dass eng verwandte
Sequenzen das Profil in ihre Richtung verzerren, wird ihr Einfluss auf das Profil rechnerisch
herabgesetzt. Als Ausgabe erhalten wir ein Profil, aus dem sich ablesen lässt, welche Stellen
im Alignment hoch konserviert sind (evtl. funktionstragend) und welche eher nicht.
© modlab® 2007
Sequenzalignment
20
Literatur
Needleman SB, Wunsch CD (1970). A general method applicable to the search for
similarities in the amino acid sequence of two proteins. J Mol Biol. 48(3): 443-53.
Smith TF, Waterman MS (1981). Identification of common molecular subsequences. J Mol
Biol. 147(1): 195-7.
Altschul SF, Gish W, Miller W, Myers EW, Lipman DJ (1990). Basic local alignment search
tool. J Mol Biol. 215(3): 403-10.
Pearson WR (1994). Using the FASTA program to search protein and DNA sequence
databases. Methods Mol Biol. 24: 307-31.
Lesk A. (2002). Introduction to Bioinformatics. Oxford University Press, Oxford.
Feng DF, Doolittle RF (1990). Progressive alignment and phylogenetic tree construction of
protein sequences. Methods Enzymol. 183: 375-87.
Thompson JD, Higgins DG, Gibson TJ (1994). CLUSTAL W: improving the sensitivity of
progressive multiple sequence alignment through sequence weighting, position-specific gap
penalties and weight matrix choice. Nucleic Acids Res. 22(22): 4673-80.
© modlab® 2007
Autokorrelationsvektoren
21
Autokorrelationsvektoren
Molekulare Deskriptoren sind im Wirkstoffdesign und für QSAR Modelle unentbehrlich,
um physikochemische Eigenschaften von Molekülen mit mathematischen Methoden zu
beschreiben. Sie ermöglichen es, umfangreiche Datenbanken mit Millionen von
Verbindungen digital abzuspeichern und chemoinformatische Methoden anzuwenden.
Autokorrelationsvektoren stellen nur eine Klasse der molekularen Deskriptoren dar. Durch die
Zusammenfassung von Korrelationswerten zu Vektoren lässt sich ein molekularer Deskriptor
erstellen, der Ähnlichkeitsberechnungen von Substanzen auf Basis der Verteilung von
Atomeigenschaften und deren Abständen zueinander zulässt. Hierbei erfolgt eine Abstraktion
der chemischen Bindungen zwischen den Atomen eines Moleküls und der Molekülstruktur im
kartesischen Raum.
Grundlegend gibt es zwei Anforderungen an einen Deskriptor. Zum einen soll er den
Vergleich von Molekülen zulassen, und zum anderen soll er praktisch anwendbar sein und
eindeutig aus den bekannten Daten berechnet werden können. Beides trifft auf
Korrelationsvektor-basierte Deskriptoren zu:
a) die Darstellung als Vektor ermöglicht eine einfache mathematische Quantifizierung
der Ähnlichkeit von Molekülen (durch Vektoralgebra), und
b) die minimale Anforderung zur Erstellung eines Korrelationsvektors ist die
zweidimensionale Molekülstruktur, die meist vorhanden ist oder leicht bestimmt
werden kann.
Bei der Verwendung von Autokorrelationsvektoren als molekularen Deskriptor sollten auch
die Nachteile stets bedacht werden. Erstens ist hier die Vernachlässigung der vollständigen
Molekülstruktur inklusive wichtiger dreidimensionaler Informationen zu nennen. Außerdem
© modlab® 2007
Autokorrelationsvektoren
22
ist keine Rekonstruktion der Molekülstruktur anhand des zugehörigen Korrelationsvektors
möglich. Der Abstraktionsgrad des Deskriptors ist zu groß, als dass eine bijektive Darstellung
möglich wäre.
Mathematische Definition
Die Wurzeln der Autokorrelationsfunktionen liegen in der Funktionsanalyse von
physikalischen Methoden. Im Allgemeinen hat sie die Form:
b
AC t = ∫ f ( x) ⋅ f ( x + t )dx .
(1)
a
Dabei stellt die Funktion f(x) eine beliebige Funktion dar, die auf dem Intervall [a, b+t]
definiert ist. Die Berechnung des Korrelationswertes an der Stelle t lässt sich folgendermaßen
beschreiben (Abbildung 1):
Gegeben seien zwei Punkte in dem Intervall [a, b+t], deren Abstand zueinander t beträgt.
Beide Punkte laufen nun unter Beibehaltung des Abstands über das Intervall. Für jeden
Zeitpunkt berechnet die Autokorrelationsfunktion das Produkt der Funktionswerte an beiden
Punkten und bildet das Integral über das gesamte Intervall. Als Ergebnis geht aus der
Rechnung ein Wert hervor, der nicht von einem Funktionswert an einer bestimmten Stelle x
abhängt, sondern vielmehr von der Verteilung der Funktionswerte im Intervall zu einem
gegebenen Zeitpunkt.
Abbildung 1: Darstellung von zwei möglichen Punkten im Abstand t einer gegebenen
Funktion f(x), die autokorreliert werden können.
© modlab® 2007
Autokorrelationsvektoren
23
Diese Tatsache ermöglicht vor allem die Anwendung von Autokorrelationsfunktionen in der
Analyse von physikalischen Spektren. Beispiele hierfür sind zum Beispiel NMRSpektrenauswertungen und Spracherkennungsprozesse. In den meisten Fällen ist zu einem
gegebenen Spektrum keine Funktion vorhanden, sondern es liegt nur der Graph vor. Die
Stärke der Autokorrelationsfunktion ist die Erkennung von sich periodisch wiederholenden
Signalen. Da die Produkte aus den Spitzen mit einem Abstand t in das Integral mit einfließen,
machen sich wiederkehrende Elemente mit einer Periodenlänge t durch Maxima in der
Autokorrelationsfunktion bemerkbar. Bei einer unterschiedlichen Periode wird der
Funktionswert an der Spitze der Funktion mit einem möglicherweise kleineren Wert
multipliziert, woraufhin die Wertigkeit des gesamten Integrals kleiner wird. Diese Eigenschaft
ist es, die die Verwendung von Autokorrelationsfunktionen insbesondere für das Filtern von
stark verrauschten Signalen auszeichnet.
Transfer in die Chemieinformatik
Moreau und Broto waren 1980 die ersten, die die Autokorrelationsfunktionen in die Welt der
Chemieinformatik einführten. Die Hauptintention war es, Aussagen über die Verteilung von
Atomeigenschaften, die als numerische Werte vorlagen, im Molekülgraphen machen zu
können. Der Transfer der klassischen Autokorrelations-funktionen auf ein als Strukturformel
vorliegendes Molekül wurde in folgender Weise vollzogen:
•
Anstatt der Stelle x auf einem Funktionsgraphen wurden die Atome im Molekül als zu
betrachtende Punkte verwendet. Die Wasserstoffatome wurden hierbei nicht in
Betracht gezogen. Alle anderen Atome wurden beliebig durchnummeriert, um eine
eindeutige Identifizierung der Punkte zu ermöglichen. Das Intervall [a, b+t] wurde
also durch das gesamte Molekül dargestellt. Aufgrund der Tatsache, dass es nur eine
endliche Anzahl von Punkten (Atome im Molekül) gibt, und keine kontinuierliche
Funktion vorliegt, konnte das Integral der Funktion durch die Aufsummierung der
Korrelationswerte ersetzt werden.
•
Als Funktionswerte f(x) wurden die Atomeigenschaften des Atoms x betrachtet. Meist
wurde
die
Funktion
als
p(x),
wie
property,
bezeichnet.
In
Autokorrelationsfunktion wirdnur eine Atomeigenschaft mit sich selbst korreliert.
© modlab® 2007
jeder
Autokorrelationsvektoren
•
24
Schließlich wurde der Abstand t als die minimale Anzahl der Bindungen zwischen
zwei Atomen definiert (topologische Distanz). Hierbei wird nicht zwischen Doppelund Einfachbindungen unterschieden.
•
Die auf diese Weise modifizierte Autokorrelationsfunktion entspricht der Formel:
AC d =
∑ p(i) ⋅ p( j )
(2)
i , j∈M ( d )
wobei M(d) als die Menge der Atomtupel (i,j) mit einer topologischen Distanz d zueinander
definiert ist.
Gleichung (2) lässt nun die Berechnung von Korrelationswerten für jede gegebene Distanz
und jede bekannte Atomeigenschaft zu. Es wird lediglich die Strukturformel des zu
kodierenden Moleküls benötigt. Betrachtet man zum Beispiel Distanzen von 0 bis 10
Bindungen und die Autokorrelation einer Atomeigenschaft, so hat der als Deskriptor
verwendete Korrelationsvektor folgende Datenstruktur:
AV = (AC0, AC1, AC2, AC3, AC4, AC5, AC6, AC7, AC8, AC9, AC10)
Der Deskriptor entspricht der Aneinanderreihung der Korrelationswerte zu den auftretenden
Atomeigenschaft bei einer Distanz d. Erfahrungsgemäß kann (2) aufgrund der
Aufsummierung zu besonders großen Korrelationswerten führen, wenn eine große Anzahl
von Atompaaren mit einer Distanz d vorliegt. Dies kann sich gerade bei dem Vergleich von
unterschiedlich großen Molekülen negativ auswirken, weshalb dies meist durch eine
Mittelung über die Anzahl der Atompaare eliminiert wird. Die erweiterte Formel lautet nun:
AC d =
1
∑ p(i) ⋅ p( j ) ,
n i , j∈M ( d )
wobei n der Anzahl der Atompaare mit einer Distanz d entspricht.
© modlab® 2007
(3)
Autokorrelationsvektoren
25
Beispiel
In der Tabelle 1 soll die Berechnung des Autokorrelationsvektors für zwei Moleküle A und B
beispielhaft gezeigt werden. Berechnet werden die Autokorrelationswerte für die
Elektronegativität der vorliegenden Atome (ENC=2,5; ENO = 3,5) mit einer Distanz von 1 bis
4 Bindungen unter Benutzung der Formel (3).
Tabelle 1:
Berechnung der Korrelationswerte der Elektronegativität für zwei Moleküle A und B.
Verbindung
A
B
O
OH
Molekülstruktur
OH
OH
Butan-1,3-diol
Name
Vereinfachte
Struktur
6
O
mit
willkürlichem Atomindex
Buttersäure
2
1
6
O
3
5
4 O
1
2
AC1
7,25
7,25
AC2
7,75
8,45
AC3
4,75
4,75
AC4
3,7
2,5
3
5
4 O
Als Ergebnis erhält man folgende Vektoren:
VerbindungA
7,25
7,75
4,75
3,7
VerbindungB
7,25
8,45
4,75
2,5
Die Deskriptoren unterscheiden sich nur in den Funktionswerten für die Distanzen 2 und 4,
weil immer bei derjenigen Verbindung ein größerer Wert auftritt, bei dem die Sauerstoffe in
dem entsprechenden Abstand zueinander vorlagen. Eine Interpretation der resultierenden
Autokorrelationsvektoren ist in folgender Weise möglich: In der Verbindung A liegen mehr
© modlab® 2007
Autokorrelationsvektoren
26
Atome mit der betrachteten Eigenschaft in einem Abstand von 4 Bindungen vor, als in der
Verbindung B. Hier tritt dies bei einer Distanz von 2 Bindungen auf.
Die betrachteten Eigenschaften müssen nicht direkt miteinander korreliert werden. In
bestimmten Fällen ist es ratsam modifizierte Werte der numerischen Eigenschaften zu
multiplizieren. Hier können unter anderem der Betrag, der Logarithmus u.ä. verwendet
werden.
Oft ist zudem die Verteilung von mehreren Atomeigenschaften auf den Molekülen zur
Beschreibung
der
biologischen
Aktivität
wichtig.
Hier
bedient
man
sich
der
Kreuzkorrelation, bei der verschiedene Eigenschaften miteinander korreliert werden. Die
verwendete Formel lässt sich in folgender Weise zusammenfassen:
AC d =
1
n
∑ ∑ p(i) ⋅ q( j ) ,
(4)
p , q∈P i , j∈M ( d )
wobei die Funktionen p und q den Elementen aus einer Funktionsmenge P mit allen
betrachteten Eigenschaften entspricht.
Autokorrelationsvektoren werden nicht nur zur Kodierung von zweidimensionalen
Molekülstrukturen verwendet. Eine Erweiterung der Methode zur Benutzung von 3-D
Molekülinformationen ist durch ein simples Austauschen der topologischen Distanz mit der
euklidischen Distanz möglich. Die Korrelationsvektoren kodieren dann für eine Beschreibung
der Eigenschaftsverteilungen im dreidimensionalen Raum, die durch das Molekül gegeben ist,
unter Berücksichtigung der Atomdistanzen in Ångstrom.
Anwendung von Korrelationsvektoren
Die Kodierung von Korrelationsvektor-basierten molekularen Deskriptoren liefert gleichgroße
Vektoren zur Beschreibung der vorliegenden Substanzen. Bei der Betrachtung von k
Atomeigenschaften und l Distanzen erhält man einen (k ⋅ l ) -dimensionalen Deskriptor für
jedes Molekül. Zur Berechnung der Ähnlichkeit von zwei Molekülen bedient man sich
einfachen mathematischen Vektorfunktionen, wie der euklidischen Norm zweier Vektoren:
v v
a −b =
n
∑ (a − b )
i
i
2
,
i =1
wobei n der Dimensionalität des Deskriptors entspricht.
© modlab® 2007
(5)
Autokorrelationsvektoren
27
Falls man mehrere Eigenschaften bei der Korrelation in Betracht zieht, können Fälle
auftreten, die sich aufgrund der Werte je Eigenschaft in (5) stärker auf die
Ähnlichkeitsanalysen auswirken. Ein einfaches Beispiel bildet zum Beispiel die Korrelation
der Elektronegativität von Atomen im Vergleich zu Korrelationen der Atommasse, welche
wesentlich höher ausfallen kann. Hier bietet es sich an, nach der Berechnung des
Korrelationsvektors auf eine Normierung des Vektors zurückzugreifen (z.B. eine Skalierung
der Werte von 0 bis 1). Neben Ähnlichkeitsanalysen werden Korrelationsvektor-basierte
Deskriptoren für viele weitere chemieinformatische Methoden verwendet.
Literatur
Moreau, G., Broto, P., 1980, Autocorrelation of Molecular Structures, Application to SAR
Studies. Nouv. J. Chim., 4, 757.
Wagener, M., Sadowski, J., Gasteiger, J., 1995, Autocorrelation of Molecular Surface
Properties for Modelung Corticosteroid Binding Globulin and Cytosolic Ah Receptor Activity
by Neural Networks. J. Am. Chem. Soc., 117, 7769.
Schneider, G., Clément-Chomienne, O., Hilfiger, L., Schneider, P., Kirsch, S., Böhm, H.-J.,
Neidhart, W., 2000, Evolutionäres De-novo-Design bioaktiver Moleküle: ein Ansatz zum
virtuellen Screening. Angew. Chem., 112, 4305.
Schneider, G., Wrede, P., 1998, Artificial neural networks for computer-based molecular
design. Prog. Biophys. Mol. Biol., 70, 175.
© modlab® 2007
Autokorrelationsvektoren
© modlab® 2007
28
NIPALS-Algorithmus
29
NIPALS-Algorithmus
Die Hauptkomponentenanalyse (Principal Component Analysis, im Folgenden mit „PCA“
abgekürzt) ist eine statistische Methode zur Analyse von multidimensionalen Daten. Mit Hilfe
dieser Technik ist es unter anderem möglich, die Dimensionalität eines Datensatzes mit einem
definiertem Informationsverlust zu reduzieren. Die Basis der PCA ist die Berechung von
Eigenvektoren. Diese haben als Eigenschaft, dass sie alle orthogonal zu einander sind. Sie
treten immer paarweise mit dem dazugehörigen Eigenwert auf, anhand welcher man die
Eigenvektoren sortieren kann. Der Eigenvektor mit dem größten Eigenwert ist als die erste
Hauptkomponente definiert. Mit ihr ist es möglich, die stärkste Beziehung in der
Datenmatrix aufzuzeigen. Aufgrund dieser Eigenschaften ist es möglich, die Daten einer
Matrix durch Ihre Projektion auf die Hauptkomponenten (Eigenvektoren mit den größten
Eigenwerten) darzustellen. Bei einer geschickten Auswahl von Eigenvektoren können so
dieselben Daten mit einer geringeren Dimensionalität wiedergegeben werden. In der Regel
wählt man hierzu alle Eigenvektoren mit einem Eigenwert > 1 aus. Zur Berechnung der
Eigenvektoren greifen viele Anwender auf die integrierten Lösungen der verwendeten
Programmpakete, wie Java oder Matlab, zu. Hier werden meist numerisch exakte,
mathematische Verfahren wie der QZ-Algorithmus, die Potenzmethode, die Inverse Iteration,
das Lanczos-, Arnoldi- oder Jacobi-Davidson-Verfahren verwendet. Alle numerischen
Verfahren haben gemeinsam, dass die Komplexität bei der Anwendung auf großen Matrizen
enorm steigt. Dadurch wird die Berechnung der Eigenvektoren sehr aufwändig und die
Methoden nicht praktikabel in der Anwendung.
Eine
Alternative
bilden
approximative
Lösungen.
Ein
populäres
Beispiel
zur
Eigenvektorabschätzung ist der 1966 von Herman Wold entwickelte NIPALS-Algorithmus
(nonlinear iterative partial least squares), welcher im Folgenden erklärt wird. Der NIPALS© modlab® 2007
NIPALS-Algorithmus
Algorithmus
wird
30
nicht
nur
in
der
Hauptkomponentenanalyse
angewendet.
Weiterentwicklungen und Derivate des Algorithmus finden sich auch in der multiplen
Regression, der Faktorzerlegung und der kanonischen Korrelationsanalyse wieder.
Prinzip und Schritte des Algorithmus
Die Hauptkomponenten werden nacheinander durch die iterative Anwendung der Schritte 1-9
(Tabelle 1) gewonnen.
Tabelle 1: Die Arbeitsschritte des NIPALS-Algorithmus.
Schritt
Funktion
Erklärung
1
s := xi
Wähle eine beliebige Spalte der Matrix X
als den initialen Scoringvektor s.
2
3
4
5
6
l=
XTs
sT s
Projiziere X auf s, um den entsprechenden
l=
l
l
Normalisiere l auf die Länge 1.
s old := s
Loadingvektor zu erhalten.
Zwischenspeichern des aktuellen Scores.
Xl
lT l
Projiziere X auf l, um den entsprechenden
d := s old − s
Bestimme die Differenz d des neuen und
s=
neuen Scoringvektor zu erhalten.
alten Scores.
7
d < t?
Falls d größer als ein vorher definierter
Schwellwert t (z.B. 10-6) ist, gehe zurück zu
Schritt 2. Ansonsten fahre fort bei Schritt 8.
8
E := X − sl T
Entferne
den
Anteil
der
gefundenen
Hauptkomponente aus der Datenmatrix X.
9
X := E
Um weitere Hauptkomponenten zu finden,
wiederhole den Algorithmus ab Schritt 1 mit
der neuen Datenmatrix.
© modlab® 2007
NIPALS-Algorithmus
31
Der NIPALS-Algorithmus approximiert eine Datenmatrix X durch die kleinere Scoringmatrix
T
S und die Loadingmatrix LT mit Hilfe der Matrixmultiplikation X = SL (Abb. 1). Das
hochgestellte „T“ an einer Matrix verdeutlicht, dass die jeweilige Matrix transponiert wird.
Abbildung 2: Prinzip des NIPALS-Algorithmus. Ziel ist die Reproduktion der Datenmenge X durch
eine Matrixmultiplikation von S und LT, die der Scoringmatrix und der transponierten
Loadingmatrix entsprechen. Die Rechtecke skizzieren die jeweiligen Matrizen mit den an den
Ecken angegebenen Dimensionen.
Literatur
Wold, H., Estimation of principal components and related models by iterative least squares,
Multivariate Analysis (Ed., Krishnaiah, P. R.), Academic Press, NY, pp. 391-420 (1966).
Wold S., 1974, A theoretical foundation of extrathermodynamic relationships (linear free
energy rela-tionships), Chemica Scripta, 5, 97-106.
Trygg, J., 2003, Chemometrics, Umeå University, Sweden, URL:
http://www.chemometrics.se/editorial/sep2003.html#4
© modlab® 2007
NIPALS-Algorithmus
© modlab® 2007
32
Graphentheorie
33
Grundlagen Graphentheorie
Graphen
Der Graph als mathematisches Modell und Datenstruktur hat in der Cheminformatik eine
zentrale Bedeutung zur Repräsentation von chemischen. Seien FE die Menge der
Kanteneigenschaften und FV die Menge der Knoteneigenschaften.
Ein Graph ist ein 4-Tupel G=(V, E, µV, µE), wobei
•
V eine endliche Menge der Knoten (engl. vertices),
•
E ⊆ V×V die Menge der Kanten (engl. edges),
•
µV: V→ FV eine Funktion ist, die Knoten Eigenschaften zuweist,
•
µE: E→ FE eine Funktion ist, die Kanten Eigenschaften zuweist.
Man unterscheidet zwischen gerichteten und ungerichteten Graphen. Für ungerichtete
Graphen gilt die Bedingung:
•
∀ v,w ∈V: (v,w) ∈ E ⇔ (w,v) ∈ E
Die Kanten eines gerichteten Graphen haben also einen Anfangs- und einen Endpunkt, daher
werden sie häufig als Pfeile dargestellt (Abbildung ). Im ungerichteten Graphen ist es gleich,
welcher Knoten der Anfangs- und welcher der Endpunkt einer Kante ist.
© modlab® 2007
Graphentheorie
34
Abbildung 1: Beispiel a) für einen ungerichteten und b) für einen gerichteten Graphen.
Stellt ein Graph das Modell eines Moleküls dar, spricht man vom molekularen Graphen.
Dabei repräsentieren die Knoten die Atome und die Kanten die Bindungen zwischen den
Atomen. Die Knoten- und Kanteneigenschaften sind in diesem Fall Atom- und
Bindungseigenschaften, z.B. das Elementsymbol oder die Bindungsordnung. Die graphische
Repräsentation eines Moleküls ist in der organischen Chemie ein Standard (Abbildung ).
O
OH
Abbildung 2: Molekularer Graph von Tetrahydrocannabinol.
Da es meistens nicht von Bedeutung ist, welches Atom der Ausgangspunkt und welches der
Endpunkt einer Bindung ist, handelt es sich beim molekularen Graphen um einen
ungerichteten Graphen.
Es gibt mehrere Möglichkeiten, einen Graphen im Rechner zu repräsentieren:
•
die Adjazenzliste
•
die Adjazenzmatrix,
•
und die Inzidenzmatrix.
Die Datenstrukturen mit den darauf operierenden effizienten Algorithmen werden in Java von
der Graphenbibliothek jgrapht (http://jgrapht.sourceforge.net/, Version 0.8.3) bereitgestellt.
© modlab® 2007
Graphentheorie
35
Subgraphen, Pfade, Zyklen, Cliquen
Sei G=(V, E, µv, µE) ein Graph. Dann heißt G’ = (V’, E’, µv’, µE’) ein Subgraph von G, wenn
•
V’⊆V
•
E’⊆E
•
µV’(v) = µV(v) wenn v ∈ V’
•
µE’(e) = µE(E) wenn e ∈ E’.
Ein Pfad in einem Graphen ist definiert als eine Reihe von Kanten e1, e2,..., en für die gilt:
•
ei und ei+1 haben einen gemeinsamen Knoten.
•
wenn für alle i ∉ {1, n} gilt: ei hat einen gemeinsamen Knoten mit ei-1 und den
anderen mit ei+1.
Ein Zykel (Kreis) ist ein Pfad, für den gilt
•
e1 und en haben einen gemeinsamen Knoten.
ein ungerichteter Graph
ein Pfad (fett gekennzeichnet)
ein Kreis (fett gekennzeichnet)
eine Clique (fett gekennzeichnet)
Abbildung 3: Übersicht über die Definitionen zur Graphentheorie.
Ein Graph heißt vollständig, wenn jeder Knoten mit jedem anderen Knoten verbunden ist.
Eine Clique ist definiert als ein vollständiger Subgraph. Die Größe der Clique ist definiert als
die Anzahl der enthaltenen Knoten. Eine maximale Clique ist echt nicht in einer größeren
© modlab® 2007
Graphentheorie
36
Clique enthalten. Eine größtmögliche Clique ist eine Clique der Größe s, wobei gilt: der
Graph enthält keine weiteren Cliquen größer s. Alle Begriffe sind mit Beispielen in der
Abbildung zusammengefasst.
Graphentheoretische Probleme und ihre Lösungen in der
Cheminformatik
Subgraph-Isomorphismus
Die Suche von Substrukturen in Molekülen kann auf graphentheoretische Methoden
zurückgeführt werden. In diesem Fall ist sie komplett innerhalb eines anderen gut
untersuchten Problems enthalten: dem Problem des Subgraph-Isomorphismus.
Eine bijektive Funktion f: V→ V’ ist ein Graph-Isomorphismus vom Graphen G=(V, E, µV,
µE ) zum Graphen G’ = (V’, E’, µv’, µE’), wenn gilt:
•
µV(v) = µV’(f(v)) für alle v∈V.
•
für jede Kante e = (v,w) ∈ E existiert eine Kante e’ = (f(v),f(w)) ∈ E’, für die gilt µE(e)
=µE(e’), und für jede Kante e’ = (v’,w’) ∈ E’ existiert eine Kante e = (f-1(v’),f-1(w’)) ∈
E für die gilt µE(e’) =µE(e).
Eine injektive Funktion f: V→ V’ ist ein Subgraph-Isomorphismus von G zu G’ wenn gilt:
•
es existiert ein Subgraph S ⊆ G’ so dass f ein Graph-Isomorphismus von G zu S ist.
Informell kann man das Problem des Subgraph-Isomorphismus so formulieren:
•
„Gegeben seien die Graphen G1 und G2. Enthält G1 eine Kopie von G2 als Subgraph?
Können wir also eine Teilmenge der Knoten von G1 finden, die zusammen mit ihren
Kanten in G1 eine exakte Kopie von G2 bilden, wenn wir die Zuordnung zwischen den
Knoten und Kanten von G2 und den Knoten und Kanten des Teilgraphen von G1
entsprechend wählen?“
© modlab® 2007
Graphentheorie
37
Das Subgraph-Isomorphismus-Problem ist NP-vollständig. Folglich konnte kein Algorithmus
geschrieben werden, der den Subgraph-Isomorphismus in polynomialer Zeit findet. Dennoch
wurden Algorithmen gefunden, die eine akzeptable mittlere Laufzeit besitzen. In der
Chemieinformatik hat der Ullman-Algorithmus breiten Zuspruch gefunden.
Der Ullman-Algorithmus, der in 1976 von J.D. Ullman publiziert wurde, ist einer der
schnellsten Algorithmen für das Problem des Subgraph-Isomorphismus. Insbesondere eignet
er sich zum Auffinden von Subgraph-Isomorphismen auf Graphen, die in ihren topologischen
Eigenschaften den Molekulargraphen ähneln. Da der Original-Algorithmus für nicht
markierte Graphen geschrieben wurde, wird im Folgenden die Version für markierte Graphen
aus vorgestellt.
Der Ullman-Algorithmus vereinigt die Backtracking-Suche mit der „forward-checking“Technik. Der Pseudocode gibt Aufschluss über die genaue Funktionsweise des UllmanAlgorithmus.
function ullman(G=(V,E,µV,µE), G’=(V’,E’,µ’V,µ’E))
//finds all subgraph isomorphisms of an arbitrary graph G in a
graph G’//
P=(pij): a |V|×|V’| matrix
F: set of vertex pairs, partial matching
01:for i = 1 to |V|
02:
for j = 1 to |V’|
03:
if µV(vi)= µ’V(v’j)
04:
then pij = 1
05:
else
06:
07:
pij = 0
end;
08:end;
09:backtrack(P,1,∅)
end function
© modlab® 2007
Graphentheorie
38
function backtrack(P,i,F)
10:
if i > |V|
11:
12:
then F is an isomorphism
else
13:
for all pij = 1 and j = 1 to |V’|
14:
F ← F ∪ {vi,v’j};
15:
P’ ← P;
16:
for all k > i
17:
p’ij = 0;
18:
end;
19:
if forwardchecking(P’,i,F) = true
20:
then backtrack(P’,i+1,F);
F ← F\{vi,v’j};
21:
22:
end;
end function
function forwardchecking(P,i,F)
23:
for k = i+1 to |V|
24:
for l = 1 to |V’|
25:
if pkl = 1
26:
if consistent({vk,v’l},F)= false
27:
pkl = 0
28:
end;
29:
end;
30:
if there exists a row k in P such that pkl = 0 for l = 1..
|V’|
31:
32:
33:
then return false
else
return true
end function
© modlab® 2007
Graphentheorie
39
function consistent({vk,v’l},F)
34:
if for each {v,v’} ∈ F
35:
if there is an edge (vk,v) ∈ E then there must be an
edge (v’,v’l) ∈ E’ with µE(vk,v)= µ’E(v’,v’l)
36:
if there is an edge (v’,v’l) ∈ E’ then there must be
an edge (vk,v) ∈ E with µE(vk,v)= µ’E(v’,v’l)
37:
then return true
38:
39:
else
return false
end function
Seien G=(V, E, µV, µE) und G’ = (V’, E’, µv’, µE’) zwei Graphen. Zunächst wird eine |V|×|V’|
Matrix P = (pij) erschaffen (Zeilen 1-8), für die gilt:
•
wenn µV(vi)= µV’(v’i), dann ist pij= 1,
•
sonst ist pij= 0.
In P steht also immer dann eine 1 in der i-ten Spalte und j-ten Zeile, wenn der Knoten vi den
knoten v’i matcht (Abbildung ).
Abbildung 4: a) Querygraph, b) Molekülgraph, c) daraus resultierende Matrix P.
© modlab® 2007
Graphentheorie
40
Danach wird die rekursive Prozedur backtrack aufgerufen (Zeile 09). Als Initialparameter
werden die Matrix P, Spaltenzähler i=1 und die Menge der erfolgreichen Matchings F=∅
übergeben.
Die Prozedur backtrack funktioniert wie folgt:
•
ist der Spaltenzähler i > |V|, so ist F ein Isomorphismus (Zeilen 10 und 11). Dies ist
dann der Fall, wenn durch die rekursiven Aufrufe jedem Knoten aus V ein Knoten aus
V’ zugewiesen wurde.
•
ist i ≤ |V|, dann ist der komplette Subgraph-Isomorphismus noch nicht gefunden. In
diesem Fall wird für jede 1 in der i-ten Spalte rekursiv backtrack aufgerufen. Als
Parameter werden der inkrementierte Spaltenzähler (i+1; Zeile 20), der bereits
gefundene Teil des Subgraphisomorphismus in Form der Menge F und die durch die
Prozedur forwardchecking bearbeitete Matrix P’.
Die Prozedur forwardchecking minimiert die Anzahl der Rekursionsschritte. Dazu wird
jede 1 in der Matrix P, also jedes „matchende“ Knotenpaar (v,v’) auf Konformität mit jedem
Element aus der Menge der bereits gefundenen „matchenden“ Knotenpaare F überprüft. Zwei
Knotenpaare (v,v’) und (w,w’) sind konform, wenn gilt:
•
wenn es eine Kante (v,w) gibt, muss es auch eine Kante (v’,w’) geben für die gilt:
µ E(v,w) = µ’E(v’,w’), und
•
wenn es eine Kante (v’,w’) gibt, muss es auch eine Kante (v,w) geben für die gilt:
µ E(v,w) = µ’E(v’,w’).
Somit erfolgt in der Prozedur forwardchecking nicht nur die Minimierung der
Backtrackschritte, sondern auch die Überprüfung, ob F auch tatsächlich ein SubgraphIsomorphismus von G zu G’ ist. Außerdem wird die Rekursion unterbrochen, wenn in P eine
Zeile vorhanden ist, die nur 0er enthält, also kein Subgraph-Isomorphismus in diesem Ast des
Rekursionsbaums gefunden werden kann.
Maximum Common Substructure
Eine weitere graphentheoretische Anwendung in der Cheminformatik ist die Berechnung der
Isomorphie größtmöglicher gemeinsamer Teilgraphen (Maximum Common Substructure,
MCS). Die MCS zweier Molekülgraphen ist in Abbildung 5 dargestellt.
© modlab® 2007
Graphentheorie
41
N
HO
OH
OH
N
O
N
Abbildung 5: MCS zweier Molekülgraphen
Die MCS kann zur Berechnung der Ähnlichkeit zweier Moleküle benutzt werden und ist wie
folgt definiert:
Seien G1 und G2 zwei Graphen, dann ist MCS eine Struktur (S1, S2), so dass gilt
•
S1 ist Subgraph von G1
•
S2 ist Subgraph von G2
•
S1 und S2 sind isomorph
•
es gibt kein S1’ für das gilt: S1 ist Subgraph von S1’
•
es gibt kein S2’ für das gilt: S2 ist Subgraph von S2’
Um alle MCS zweier Graphen aufzuzählen, bedient man sich u.a. der Cliquendetektion auf
dem Assoziationsgraphen.
Cliquendetektion auf dem Assoziationsgraphen
Die Lösung des MCS-Problems durch Cliquendetektion auf dem Assoziationsgraphen besteht
im wesentlichen aus zwei Schritten:
•
Erstellung des Assoziationsgraphen,
•
Cliquendetektion auf dem Assoziationsgraphen.
Für zwei Graphen G=(V, E, µV, µE) und G’ = (V’, E’, µv’, µE’) ist der Assoziationsgraph
(Abbildung 6) definiert als ein unmarkierter Graph GA = (VA, EA) mit VA ⊆ V × V’ und EA ⊆
VA × VA. vA ∈ VA heißt a-Knoten (Assoziationsknoten), eA ∈ EA heißt a-Kante
(Assoziationskante) von GA. Für GA muß gelten:
© modlab® 2007
Graphentheorie
•
VA = {(v,v’)| v ∈ V, v’ ∈ V’, µV(v) = µV’(v’) }
•
EA besteht aus a-Kanten eA= (vA,wA) mit vA=(v,v’), wA=(w,w’), so dass gilt
42
o v ≠ w und v’ ≠ w’
o wenn eine Kante e = (v,w) ∈ E existiert, muss eine Kante e’ = (v’,w’) ∈ E’
existieren und µE (e) = µE’(e’) muss gelten.
o wenn keine Kante e = (v,w) ∈ E existiert, darf auch keine Kante e’ = (v’,w’) ∈
E’ existieren.
Abbildung 6: a) Querygraph. b) Molekülgraph. c) Assoziationsgraph aus a) und b), grau
eingezeichnet: Clique der Größe 4.
Wenn also die a-Knoten (v1,v’1), (v2,v’2)… (vn,v’n) für 1≤ n ≤ |V|⋅|V’| im Assoziationsgraphen
paarweise miteinander verbunden sind, ist der Subgraph in V, der durch die Knoten v1, v2,…,vn
induziert ist, isomorph zum Subgraphen in V’, der durch die Knoten v’1, v’2,…,v’n induziert
ist. Der Isomorphismus ist durch (v1,v’1), (v2,v’2)… (vn,v’n) explizit gegeben.
Abbildung 6 zeigt die Erstellung eines Assoziationsgraphen aus dem Molekülgraphen g1
(Alanin) und einem Querygraphen g2 (Carbonylfunktion verbunden mit einem Stickstoff über
eine Kohlenstoffbrücke). Die Atomtypen entsprechen dabei den Knoteneigenschaften, die
Bindungsordnungen den Kanteneigenschaften. Nun wird z.B. ein a-Knoten (3,1’) erstellt, weil
der Knoten 3 dieselbe Eigenschaft trägt wie der Knoten 1’, nämlich O (Sauerstoff). Einen aKnoten (3,4’) gibt es nicht, da der Knoten 3 die Eigenschaft O (Sauerstoff) und der Knoten 4’
© modlab® 2007
Graphentheorie
43
die Eigenschaft N (Stickstoff) trägt. Ähnlich verfährt man bei der Erstellung der a-Kanten.
Die a-Knoten (3,1’) und (2,2’) werden durch eine a-Kante verbunden, da sowohl in g1 die
Knoten 3 und 2 als auch in g2 die Knoten 1’ und 2’ durch eine Kante mit der Eigenschaft
„Doppelbindung“ verbunden sind. Die a-Knoten (3,1’) und (6,4’) sind verbunden, weil es in
g1 keine Kante (3,6) und in g2 keine Kante (1’,4’) existiert. Der komplette a-Graph enthält
eine Clique der Größe 4, nämlich {(3,1’), (4,3’),(2,2’),(6,4’)} (in Abbildung , rot
hervorgehoben). Offensichtlich entspricht sie dem MCS von g2 zu g1.
Der zweite Schritt besteht in der Suche der Cliquen auf dem a-Graphen. In der Literatur gibt
es vielfältige Ansätze zur Lösung dieses Problems. Der schnellste vollkombinatorische Ansatz
ist der Bron-Kerbosch-Algorithmus. Es handelt sich dabei um einen rekursiven BacktrackingAlgorithmus, der alle maximalen Cliquen in einem Graphen aufzählt. Im Wesentlichen
operiert der BK-Algorithmus auf drei Mengen C, P und S.
Die Menge C (Clique) ist die Menge der Knoten, die bereits als komplett verbunden gefunden
wurden, also eine Clique bilden. Die Menge P (Potential) enthält diejenigen Knoten, die zu
dem zuletzt zu C hinzugekommenen Knoten adjazent sind, folglich also für die Erweiterung
der Clique benutzt werden können. Die Menge S enthält all die Knoten, die nicht mehr für die
Erweiterung von C benutzt werden können, weil alle Cliquen, die diese Knoten enthalten,
bereits gefunden wurden. Der Pseudocode gibt die Funktionsweise des BK-Algorithmus
wieder.
Der Algorithmus wird mit C,S = ∅ und P=V initialisiert. Wenn die Mengen S und P leer sind,
ist C eine maximale Clique und kann ausgegeben oder gespeichert werden (Zeile 03). Ist dies
nicht der Fall, so wird jeder Knoten aus P in der Schleife (Zeilen 04-11) bearbeitet. Ein
ausgesuchter Knoten ui wird aus P entfernt (Zeile 05), P wird nach P’ (Zeile 06) und S nach
S’ (Zeile 07) kopiert, um für den rekursiven Aufruf verwendet zu werden. Knoten, die mit ui
verbundenen sind, werden in N gespeichert (Zeile 08). Der rekursive Aufruf erfolgt mit der
Menge C∪{ui} (die bereits gefundene Clique wird um ui erweitert), P∩N (nur die Knoten in
P, die mit ui verbunden sind, dürfen für die potentielle Erweiterung der Clique verwendet
werden) und S∩N (alle Knoten, die bereits betrachtet wurden und mit ui verbunden sind)
(Zeile 09). Anschließend wird ui der Menge S zugefügt (Zeile 10).
© modlab® 2007
Graphentheorie
44
function find_all_cliques(C,P,S)
//enumerates all cliques in an arbitrary graph G //
C: set of vertices belonging to the current clique
P: set of vertices which can be added to C
S: set of vertices which are not allowed to be added to C
N[u]: set of vertices which are adjacent to vertex u in G
01:
Let P be the set {u1,...,uk}⊆ V;
02:
if P = ∅ and S = ∅
03:
then C is a maximal clique
04:
else for i ← 1 to k
05:
do P ← P\{ui};
06:
P’ ← P;
07:
S’ ← S;
08:
N ← {v∈V | {ui,v}∈E};
09:
find_all_cliques(C∪{ui},P’∩N,S’∩N);
10:
S ← S ∪ {ui};
11:
end;
12:end;
end function
Der BK-Algorithmus wurde bereits in vielen bioinformatischen Zusammenhängen verwendet
und modifiziert. Die besondere Geschwindigkeit der sog. „Version2“ des BK-Algorithmus
liegt in einer Heuristik bei der Wahl des Knotens ui aus P. Diese motiviert sich aus der
Verwendung der Menge S, da man die Abbruchbedingung für die Ausgabe der Clique auch so
formulieren kann: Es gibt einen Knoten s in S, der mit allen Knoten in P verbunden ist. Ein
solcher Knoten s kann niemals aus S entfernt werden. Somit haben wir eine Möglichkeit,
vorzeitig vorherzusagen, ob ein Ast im Backtrackingbaum zum Erfolg führt oder nicht.
Allgemein nennt man diese Backtracking-Technik die „branch-and-bound“ Methode, das
Abbruchkriterium ist das „branch-and-bound“ Kriterium. Die „Version2“ des BKAlgorithmus sucht ui aus P so aus, dass das „branch-and-bound“ Kriterium möglichst schnell
eintritt. Dies geschieht in folgender Weise: alle Knoten in S sind mit einem Zähler assoziiert,
welcher die Anzahl der Kanten zu den Knoten in P wiedergibt. Verschiebt man nun einen
Knoten p aus P nach S, so vergrößern sich die Zähler aller Knoten in S höchstens um 1 und p
bekommt einen neuen Zähler. Das „branch-and-bound“ Kriterium kann nun folgendermaßen
© modlab® 2007
Graphentheorie
45
formuliert werden: Es gibt einen Knoten s in S mit Zähler z =|P|. Bron und Kerbosch zeigen,
dass man dieses Kriterium am schnellsten erreicht, wenn man ui aus P so auswählt, dass ui mit
demjenigen Knoten s in S durch eine Kante verbunden ist, welcher den höchsten Zähler z hat.
Dadurch erhöht man in jedem Schritt den Zähler von s um 1, das „branch-and-bound“
Kriterium wird auf dem schnellst möglichen Wege erreicht.
Literatur
Graphentheorie, Komplexizität, grundlegende Algorithmen
G. Valiente (2002), Algorithms on Trees and Graphs, Springer Berlin Heidelberg.
Ottmann T, Widmayer P (1996). Algorithmen und Datenstrukturen, Spektrum Akademischer
Verlag GmbH, Heidelberg, 537ff.
Garey R, Johnson DS (1979). Comuters and Intractability: a Guide to the Theory of NPCompleteness, W. H. Freeman and Company, San Francisco.
Schöning U (2001), Algorithmik, Spektrum Akademischer Verlag GmbH, Heidelberg.
Algorithmen zur Substruktursuche
Barnard J (1993). "Substructure Searching Methods - Old and New." J. Chem. Inf. Comp. Sci.
33, 532-538.
Messmer B (1995). Efficient Graph Matching Algorithms, Universität Bern, Bern, 11ff.
Ullmann J (1976). "Algorithm for Subgraph Isomorphism." Journal of the ACM 23, 31-42.
Cliquendetectionsalgorithmen und MCS
Bron C, Kerbosch J (1973). "Agorithm 457: Finding all Cliques of an Undirected Graph."
Communications of the ACM 16, 575-577.
Koch I (2001). "Enumerating all connected maximal common subgraphs in two graphs."
Theoretical Computer Science 250, 1-30.
Raymond J, Gardiner E, Willett P (2002). "RASCAL: Calculation of graph similarity using
maximum common edge subgraphs." Computer Journal 45, 631-644.
© modlab® 2007
Graphentheorie
© modlab® 2007
46
Künstliche neuronale Netze
47
Künstliche neuronale Netze
Künstliche neuronale Netze (engl.: artificial neural net, ANN) bilden eine wichtige Kategorie
im Bereich des maschinellen Lernens und der künstlichen Intelligenz. Ihre Aufgabe ist es,
anhand von Trainingsbeispielen eine Funktion (allgemein: ein Muster) zu erlernen und
anschließend das Erlernte auf unbekannte Beispiele anzuwenden. Ihre generelle Fähigkeit zur
Mustererkennung und Klassifizierung macht ANNs in großer Breite in der Praxis einsetzbar:
Von der Spracherkennung über Komprimierung und Rauschunterdrückung in der
Bildverarbeitung bis hin zur Vorhersage von Aktienkursverläufen wird auf künstliche
neuronale Netze zurückgegriffen.
ANNs sind in ihrem Aufbau und in ihrer Funktion biologischen neuronalen Netzen
nachempfunden. Das Zusammenspiel relativ simpler Untereinheiten, die in Anlehnung an die
biologische Terminologie als Neuronen bezeichnet werden, ergibt durch deren Vernetzung ein
komplexes System zur Informationsverarbeitung.
Die Art der Vernetzung der Neuronen ist ein Merkmal zur Unterteilung in verschiedene
Klassen künstlicher neuronaler Netze. So unterscheidet man im Wesentlichen zwischen
vollständig und teilweise verbundenen Netzen. Als Vertreter der vollständig verbundenen
Netze sei hier das Hopfield-Neural-Network genannt. In ihm ist jedes Neuron mit allen
anderen Neuronen verbunden.
Dieser Teil des Skriptes konzentriert sich hauptsächlich auf eine bestimmte Klasse der
teilweise verbundenen Netzwerke – den Feed-Forward-Netzen.
Genereller Aufbau von Feed-Forward-Netzen
Feed-Forward-Netze folgen einem schichtartigen Aufbau. Die oberste Schicht wird als InputLayer bezeichnet. Darauf folgt eine (theoretisch) beliebige Anzahl von sog. Hidden-Layer.
Die
abschließende Schicht wird als Output-Layer
© modlab® 2007
bezeichnet. Abbildung 1 zeigt den
Künstliche neuronale Netze
48
allgemeinen Aufbau eines vierlagigen Feed-Forward-Netzes. Jede Schicht wird also bei der
Nomenklatur gezählt.
Abbildung 1: Aufbau eines vierlagigen Feed-Forward-Netzes.
Die
namensgebende
Eigenschaft
der
Feed-Forward-Netze
ist,
dass
die
Informationsverarbeitung nur in eine Richtung (vom Input-Layer in Richtung des OutputLayer) und zwischen direkt benachbarten Schichten erfolgt. Daraus resultiert die in
Abbildung 1 gezeigte Vernetzung zwischen den benachbarten Schichten: Jedes Neuron eines
Hidden-Layers ist mit allen Neuronen der darüber liegenden Schicht und mit allen Neuronen
der darunter liegenden Schicht verbunden.
Im Folgenden soll zunächst auf die einfachste Feed-Forward-Architektur - das Perzeptron eingegangen werden, um anschließend komplexere Beispiele zu betrachten.
Das Perzeptron
Das Single Layer Perzeptron
Das Single Layer Perzeptron, kurz SLP, stellt die einfachste Art eines Feed-Forward-Netzes
dar. Entwickelt wurde es 1958 von Frank Rosenblatt. Es besteht aus einem Input-Layer,
dessen Neuronen direkt mit einem Output-Neuron verbunden sind (Abbildung 2).
Zur Vermeidung von Missverständnissen: Nach obiger Definition handelt es sich beim SLP
um ein zweilagiges Netz, welches jedoch nur eine aktive Schicht besitzt und deshalb als
Single Layer bezeichnet wird.
© modlab® 2007
Künstliche neuronale Netze
49
Die Verbindungen zwischen den Neuronen sind mit Gewichten versehen. Diese beschreiben
die Intensität, mit der der jeweilige Input auf das Ergebnis des Outputs einwirkt. In dem
Ouput-Neuron werden die Eingaben verarbeitet. Es wird eine gewichtete Summe, nämlich die
Summe der Produkte der Gewichte und der Inputwerte, berechnet. Weiterhin wird ein
zusätzlicher Wert, das sog. Bias, zur Summe hinzuaddiert. Das Bias-Neuron ist ein
zusätzliches Neuron, welches stets den Wert 1 ausgibt. Wie alle Neuronen besitzt es ein
Gewicht. In Abbildung 2 ist dieses mit Ө bezeichnet.
n
= ∑ xi wi + θ
i =1
Abbildung 2: Schematische Darstellung eines Perzeptrons
Das
Ergebnis
dieser
Berechnung
wird
in
der
sog.
Aktivierungs-
oder
Schwellenwertfunktion verarbeitet. Der Wert, den diese Funktion annimmt, bezeichnet den
Zustand des Neurons. Für eine binäre Schwellenwertfunktion gibt er an, ob ein Neuron
aktiviert oder deaktiviert ist (Abbildung 3), bzw. bei anderen Aktivierungsfunktionen, wie
stark die Aktivierung ist (Abbildung 6). Im Falle des SLPs, das mit einer binären
Schwellenwertfunktion arbeitet, gibt das Neuron als Output den Wert 1 aus, wenn das Neuron
aktiviert ist. Sollte das Ergebnis der gewichteten Summe unter dem gegebenen Schwellenwert
liegen, so geht das Neuron in einen deaktivierten Zustand über. Die Ausgabe beträgt in
diesem Fall -1. Der Schwellenwert liegt bei der in Abbildung 3 gezeigten binären
Schwellenwertfunktion bei 0.
© modlab® 2007
Künstliche neuronale Netze
50
Abbildung 3: Binäre Schwellenwertfunktion des SLP. Der Schwellenwert der Funktion ist
hier 0.
Mit Hilfe des Bias ist eine implizite Verschiebung des Schwellenwertes möglich. Wie wir
später sehen werden, ist das Training eines neuronalen Netzes durch die Veränderung der
Gewichte charakterisiert. Die Veränderung des Bias zieht eine Veränderung des
Schwellenwertes des Neurons nach sich. Sinkt das Bias-Gewicht, wirkt sich dies durch ein
Sinken der gewichteten Summe aus. Folglich erhöht sich dadurch implizit der Schwellenwert
für das Neuron, d.h. Eingaben und Gewichte müssen größer sein, um mit gleicher Stärke auf
die Aktivität des Neurons einzuwirken. Der Vorteil, die Veränderung des Schwellenwertes
über das Bias darzustellen, liegt darin, dass in Netzen mit mehr als einem Neuron für alle
Neuronen die gleiche Aktivierungsfunktion benutzt werden kann. Explizit bleibt der
Schwellenwert der Aktivierungsfunktion unverändert für alle Neuronen gleich. Durch das
Verändern des Bias-Gewichts während des Trainings kann er jedoch implizit für jedes Neuron
individuell verschoben werden. Ohne das zusätzliche Bias-Neuron benötigte man dafür für
jedes Neuron eine individuelle Aktivierungsfunktion, die zusätzlich während des Trainings
verändert werden müsste.
SLPs sind in der Lage, Klassifizierungsprobleme zu lösen, die linear separierbar sind. Die
Klassifizierung erfolgt hierbei implizit durch das Legen einer trennenden Hyperebene durch
die Punktmenge. Diese Hyperebene ist in ihrer Dimension stets um eins geringer als die
Dimension der zu erlernenden Funktion.
Explizit erfolgt die Trennung durch die vom Perzeptron erlernte Funktion, die orthogonal zu
dieser trennenden Hyperebene steht.
© modlab® 2007
Künstliche neuronale Netze
51
Abbildung 4 illustriert die lineare Trennbarkeit. Hierbei ist die eingezeichnete Gerade die
trennende Hyperebene. Wie man sieht ist die zu erlernende Funktion zweidimensional,
während die trennende Hyperebene eine Gerade ist, die sich durch die allgemeine
eindimensionale Geradengleichung darstellen lässt. Sie ist in (1) gezeigt.
f ( x) = ax + b
(1)
Ist das Klassifizierungsproblem nicht linear separierbar, kann es durch das SLP nicht gelöst
werden. Als populäres Beispiel kann hier die XOR-Funktion angeführt werden. Es kann durch
ein einzelnes Perzeptron nicht gelöst werden.
Abbildung 4: Ein linear separierbares Klassifizierungsproblem im zweidimensionalen
Deskriptorraum.
Die Lösung des XOR-Problems
Für logische Operatoren wie AND oder OR ist das SLP in der Lage, durch das Legen einer
Geraden, die Punkte so zu separieren, dass eine Lösung möglich ist. Betrachtet man aber
Abbildung 5, so sieht man, dass dies für den XOR-Fall nicht möglich ist. Egal, wie eine
Gerade durch den Raum gelegt wird, ist es nicht möglich, dass diese die Punkte {(0,0),(1,1)}
von den Punkten {(0,1),(1,0)} trennt. Gezeigt wurde dies 1969 von Minsky und Papert.
Die Separierung des Raumes durch zwei Geraden würde zu der Lösung des Problems führen.
Dies ist allerdings nur mit einem mehrschichtigen Perzeptron lösbar.
© modlab® 2007
Künstliche neuronale Netze
52
Abbildung 5: Das XOR-Problem. Die umrahmten Eingaben sollen in eine Klasse
zusammengefasst werden, die anderen beiden in eine zweite Klasse.
Mehrlagige Netze
Ein einzelnes Neuron erstellt aus seinen Inputwerten und den zugehörigen Gewichten eine
gewichtete Summe, also eine lineare Funktion. Das SLP, welches im Wesentlichen ein
Neuron darstellt, kann also nur linear trennbare Klassifizierungsprobleme lösen. Wie am
Beispiel der XOR-Funktion gesehen, sind für das Perzeptron damit viele (sogar der
überwiegende Teil) der Klassifizierungsprobleme nicht lösbar. Schon das XOR-Problem
zeigt, dass der Übergang vom SLP zum Multi Layer Perzeptron (abgekürzt MLP) die Menge
der lösbaren Probleme vergrößert: MLPs sind generelle Funktionsapproximatoren.
Der Übergang zu mehrlagigen Netzen mit mehreren Neuronen pro Hidden-Schicht ergibt eine
Kombination linearer Gleichungen. Damit können beliebige Funktionen approximiert werden.
MLPs enthalten nichtlineare Aktivierungsfunktionen, z.B. die Sigmoidalfunktion und der
hyperbolische Tangens. Neben ihrem nichtlinearen Verlauf zeichnet diese Funktionen aus,
dass sie stetig und differenzierbar sind. Dies ist, wie wir noch sehen werden, für das NetzTraining wichtig. Weiterhin bilden sie alle möglichen Ergebnisse der gewichteten Summe auf
das Intervall ]0,1[ bzw. ]-1,1[ ab. Abbildung 6 zeigt die entsprechenden Funktionsverläufe.
Achtung: Die Fähigkeit eines MLPs beliebige, auch nichtlineare Funktionen zu
approximieren, ist nicht durch die Wahl der Aktivierungsfunktion begründet, sondern durch
die Architektur des Netzes.
© modlab® 2007
Künstliche neuronale Netze
53
Abbildung 6: Links die Sigmoidalfunktion, rechts der hyperbolische Tangens
Die Neuronen der Hidden-Layer geben also nicht direkt das Ergebnis der gewichteten Summe
an die nächste Schicht weiter, sondern ein zuvor durch die Aktivierungsfunktion
transformierten Wert.
Eine zentrale Frage beim Einsatz von ANNs zu Klassifizierung ist die der zu verwendenden
Netztopologie. Wie viele verdeckte Schichten werden benötigt? Wie viele Neuronen sind in
der jeweiligen Schicht optimal? Es gibt kein deterministisches mathematisches Verfahren, das
die optimale Netztopologie für ein gegebenes Problem bestimmt. Bei der Wahl der
Netztopologie stehen sich wie so oft zwei gegensätzliche Anforderungen gegenüber:
Einerseits soll das Netz die Möglichkeit haben, sich gut an die Trainingsbeispiele anzupassen.
Hierfür ist ein großes Netz von Vorteil. Andererseits soll das trainierte Netz möglichst gut
generalisieren, also ihm unbekannte Eingaben korrekt klassifizieren, und nicht einfach nur
den Trainingsdatensatz auswendig lernen. Diesem als Overfitting bezeichneten Problem
entgeht ein kompaktes Netz eher. Deshalb bleibt hier oft nur der trial-and-error-Ansatz.
Dennoch lässt sich generell sagen, dass in aller Regel mehr als zwei Hidden-Layer keinen
Sinn machen. Bereits Netze mit dieser Anzahl an verdeckten Schichten können potenziell alle
in der Praxis auftretenden Trennungsprobleme lösen. Eine weitere Vergrößerung der Netze
würde also keinen Vorteil für deren Mächtigkeit bringen, gleichzeitig aber die Gefahr des
Overfittings erhöhen und das Training verlangsamen.
Netztraining
Das Training eines ANN ist nichts anderes als die Anpassung der Gewichte zwischen den
Neuronen. Ziel ist es, die Gewichte so anzupassen, dass der Fehler des Netzes minimal wird.
Mit Fehler ist hier die Summe der Quadrate der Differenzen zwischen den vom Netz
berechneten Werten für die Trainingsmuster und deren gegebenen Zielwerten gemeint. Die
© modlab® 2007
Künstliche neuronale Netze
54
Existenz der Zielwerte ist es, die das Training von ANNs zu einem Vertreter des überwachten
Lernens macht. Zusammengefasst führt dies zu Gleichung (2), wobei E den Fehlerwert des
Netzes summiert über alle k Trainingsmuster, ti den Zielwert des Trainingsmusters i und oi
dessen vom Netz berechneten Output-Wert darstellt.
k
v
E ( w) = ∑ (oi − t i ) 2
min.
(2)
i =1
Dies ist die während des Trainings zu minimierende Funktion. Macht man sich klar, dass in
die Berechnung der Output-Werte oi die Netzgewichte maßgeblich einfließen, ist leicht
v
ersichtlich, dass E eine Funktion der Gewichtswerte des Netzes ist (in (2) ist w der Vektor
aller Gewichtswerte des Netzes). Die Anzahl der Gewichte gibt also die Dimension des
Raumes an, in dem die Fehlerfunktion definiert ist. Abbildung 7 zeigt eine mögliche
Fehlerfunktion eines Netzes mit zwei Gewichten.
Auf die Gefahren in sehr hochdimensionalen Räumen und die unter anderem daraus folgende
Bevorzugung möglichst kompakter Netze soll später noch eingegangen werden.
Der populärste Trainingsalgorithmus für ANNs - der Backpropagtion of Errors (kurz
Backprop) - basiert auf der Idee des Gradientenabstieges. Dabei wird stets in Richtung des
steilsten Gefälles des Funktionsgraphen gelaufen. Bildlich kann man sich dies als einen
zufällig im Gebirge abgesetzten Skifahrer (das entspricht der zufällige Gewichtsinitialisierung
beim Erzeugen des Netzes) vorstellen, der anschließend eine Abfahrt immer entlang des
stärksten Gefälles startet, bis er im nächstgelegenen Tal landet.
Abbildung 7: Fehlerlandschaft, Quelle: [1]
© modlab® 2007
Künstliche neuronale Netze
55
Der Bewegung des Skifahrers entspricht in unserem Problem eine Veränderung der Gewichte,
sodass sich der Fehler des Netzes verringert. Das Gradientenabstiegverfahren ermöglicht es
nun, für jedes Gewicht (jede Dimension) die Richtung (Vorzeichen) und die Intensität
(numerischer Wert) der Veränderung zu finden, um den Fehler zu verkleinern. Mathematisch
wird dies durch eine partielle Ableitung der Fehlerfunktion nach jedem Gewicht erreicht. Der
dabei entstehende Vektor von partiellen Ableitungen wird als Gradient oder Nabla-Operator
bezeichnet und ist in (3) definiert.
∂
∂
∂
g =
,
, ... ,
∂x n
∂x1 ∂x 2
(3)
Backpropagation nimmt nun die Modifizierung der Gewichte proportional zum Gradienten
vor, wobei man den Proportionalitätfaktor als Lernrate η bezeichnet. Sie dient als Faktor der
linearen Modulierung des Einflusses des Gradienten. In unserem Bild des Skifahrers wäre
dies so etwas wie die Qualität seiner Skier: Je besser das Material (je höher η), desto schneller
fährt er bei gleichem Gefälle. Zusammengefasst ist dies in (4).
v
∆w = −η ⋅ g
(4)
v
∆w stellt die Veränderung der einzelnen Gewichte zusammengefasst als Vektor dar, während
g den Gradienten der Fehlerfunktion E bezeichnet. Am hypothetischen Beispiel eines Netzes
mit nur einem Gewichtswert soll das Vorgehen des Gradientenabstieges verdeutlicht werden
(Abbildung 8).
Der Gradient ist die erste Ableitung der gezeigten Funktion nach dem Gewicht w. Hier wird
auch deutlich, warum in (4) der negative Gradient zur Gewichtsänderung herangezogen wird:
Der Funktionswert der ersten Ableitung ist bei w1 negativ, die Änderung des Gewichtes muss
jedoch positiv sein, um sich dem Minimum der Funktion zu nähern. Genau umgekehrt liegt
der Fall bei w2. Außerdem ist in Abbildung 8 ersichtlich, dass sich die Neigung der Geraden,
die ja die partielle Ableitung der Funktion an einer Position darstellt, auf die Stärke der
Gewichtsänderung auswirkt. Je stärker die Steigung (je höher der Wert der Ableitung), desto
größer ist auch die Veränderung des Gewichtes hin zum Optimum.
© modlab® 2007
Künstliche neuronale Netze
56
Abbildung 8: Gradientenabstieg. w1 und w2 stellen zwei unterschiedliche Werte des
Gewichtes w dar. Die Steigungen der Geraden entsprechen den Ableitungen der Funktion
E(w) an diesen Positionen dar. Das zu findende Minimum der Funktion liegt bei w = 0.
Backpropagation stellt ein iteratives Verfahren zur Verfügung, um einen Gradientenabstieg
auf der Fehlerfunktion zu ermöglichen. Die Veränderung der Gewichtwerte wird dabei wie in
(5) bestimmt.
wijnew = wijold + ∆wij .
(5)
wij stellt die Veränderung des Gewichtwertes wij in einem Trainingsschritt dar. Die
Berechnung von wij ist in (6) gezeigt und geht auf (4) und damit auf den Gradientenabstieg
zurück, wobei hier die Fehlerfunktion E partiell nach dem zu aktualisierenden Gewicht wij
abgeleitet wird. (Zur Wiederholung: Dies entspricht einer Komponente des Gradienten g aus
(4), der ja den Vektor aller partiellen Ableitungen darstellt).
∆wij = −η
∂E
= ηδ j xi .
∂wij
(6)
wij stellt hier das Gewicht zwischen Neuron i und Neuron j dar; xi ist der Ausgabewert des
Neurons i. Entscheidend für den Backpropagation-Algorithmus ist nun, dass sich diese
partiellen Ableitungen der Fehlerfunktion nach den Gewichten und damit δj effizient
berechnen lassen. Dabei muss allerdings unterschieden werden, ob es sich bei dem zu
© modlab® 2007
Künstliche neuronale Netze
57
verändernden Gewicht um ein Gewicht zwischen dem untersten Hidden-Layer und der
Output-Layer handelt, oder um ein Gewicht zwischen höher liegenden Schichten. Die
Berechnung von δj unterscheidet sich also je nach dem, ob Neuron j ein Output-Neuron oder
ein Hidden-Neuron ist. Zusammengefasst ist dies in (7).
act ' ( net j )(t j − o j )
δ j = act ' ( net ) δ w
j ∑ k
jk
1≤ k ≤ n
falls j Outputneur on ist
falls j Hiddenneur on ist
(7)
Hierbei entspricht tj im oberen Teil von (7) dem Zielwert und n im unteren Teil der Anzahl
der Neuronen in der Schicht unterhalb des Neurons j. Abbildung 9 soll der besseren Übersicht
und der Klärung der Variablenbezeichnungen dienen.
Abbildung 9: Kantengewichte sind rechts von ihrer Kante geschrieben, Ein- bzw.
Ausgabewerte der Neuronen links davon. Die Bias-Neuronen sind durch „B“ gekennzeichnet,
die Kästchen stellen die Aktivierungsfunktion dar.
Exemplarisch sollen die Berechnungen der w-Werte für die Gewichte wij und vjk aus
Abbildung 9 demonstriert werden. Nehmen wir an, das angegebene Netz benutzt die in (8)
gezeigte Sigmoidalfunktion zur Aktivierung. Da wir nach (7) deren erste Ableitung benötigen,
© modlab® 2007
Künstliche neuronale Netze
wird
auch
ersichtlich,
58
warum
eine
Forderung
an
Aktivierungsfunktionen
ihre
Differenzierbarkeit ist. Die erste Ableitung der Sigmoidalfunktion sig(x) ist, wie in (9)
ersichtlich, leicht zu errechnen.
sig ( x) =
1
.
1 + e−x
(8)
sig ' ( x) = sig ( x) ⋅ (1 − sig ( x)) .
(9)
Damit ergibt sich nach (6) für ∆vjk (k ist Output-Neuron):
∆v jk = η ⋅ (t − o ) ⋅ sig (net ) ⋅ (1 − sig (net )) ⋅ o j ,
k 444444
k3
1k44k44442
δ
k
und für ∆ wij (j ist Hidden-Neuron):
∆wij = η ⋅ (δ v ) ⋅ sig (net ) ⋅ (1 − sig ( net )) ⋅ inpi .
k jk
j
j
144444424444443
δ
j
Aus (7) ist auch ersichtlich, dass zur Berechnung der δ-Werte der Neuronen einer Schicht die
δ-Werte der Neuronen der darunter liegenden Schicht benötigt werden. Einzig die δ-Werte
des Output-Layers sind direkt berechenbar. Der Netzfehler wird also durch den Algorithmus
vom Output-Layer über die Hidden-Layer
von unten nach
oben durchgereicht
(„backpropagation“). Dies gab dem Trainingsalgorithmus seinen Namen. Die Gewichte der
Bias-Neuronen werden wie alle anderen Gewichte nach dem beschriebenen Schema während
des Trainings angepasst.
Für Details der mathematischen Herleitung sei auf [1] verwiesen. Dort wird genau
beschrieben, wie die partielle Ableitung von E nach einem Gewicht durch Anwendung der
Kettenregel das in (7) angegebene δ ergibt.
Probleme und Lösungsansätze
Die Verwendung des Gradientenabstiegs bringt nicht nur Vorteile mit sich. Man muss sich
auch Gedanken um etwaige Probleme machen, die bei der Wahl dieser Methode auftreten
© modlab® 2007
Künstliche neuronale Netze
59
können. Ohne Zweifel ist es mit Hilfe des Gradientenabstiegs möglich, das Netz immer besser
werden zu lassen. Es stellt sich nur die Frage, ob man nach Beendigung des Trainings
tatsächlich die optimale Gewichtskonstellation und dadurch auch die Funktion gefunden hat,
die die Datenklassen am besten voneinander trennen kann. Hierbei trifft man oft auf ein
allgemeines Problem von Optimierungsverfahren: das Auftreten lokaler Minima, die nicht
wieder verlassen werden.
Die Anzahl potentieller lokaler Minima erhöht sich mit der Dimension des Raumes. Es macht
also Sinn, das Netz nicht unbedingt mit der größtmöglichen Anzahl Parameter, die einem zur
Verfügung stehen, zu trainieren, sondern im Vorfeld wichtige Parameter zu selektieren.
Im Gegensatz dazu steht das Problem der flachen Plateaus. Diese bewirken, dass der Gradient
sehr niedrige Werte nahe 0 oder unter Umständen sogar 0 annimmt. Dies führt zu einer
Stagnation des Verfahrens. Das Risiko des Auftretens flacher Plateaus steigt mit abnehmender
Anzahl Trainingsparameter.
Im Wesentlichen sind zwei Methoden zu benennen, die sich mit den genannten Problemen
befassen, und gute Resultate erzielen:
1. Das Verändern der Lernrate zur Laufzeit, und
2. das Einführen eines Momentum-Terms.
Wie wir bereits gesehen haben, besitzt die Lernrate Einfluss auf die Veränderung der
Gewichte nach jedem Trainingszyklus. Am Anfang macht es durchaus Sinn, mit einer hohen
Lernrate zu starten, da der Algorithmus dadurch in der Lage ist, sich recht schnell auf dem
Suchraum zu bewegen. Im späteren Verlauf des Trainings ist eine große Lernrate allerdings
nicht von Vorteil. Diese stellt nämlich auch die Gefahr dar, gute Optima wieder zu verlassen
oder zwischen gleich guten Werten zu oszillieren. Eine Verringerung der Lernrate zur
Laufzeit des Algorithmus bietet den Vorteil, dass man zunächst recht schnell gute Positionen
des Raumes erkennt und diese durch die Verringerung der Lernrate nicht sofort wieder
verlässt. Weiterhin ist dadurch eine feinere Optimierung möglich, indem das Netz mit immer
kleiner werdenden Schritten weiter verbessert wird. Ein einfaches Beispiel für dieses
Vorgehen ist die Verwendung einer adaptiven Lernrate nach Darken und Moody. Diese ist
in (10) definiert.
ηn =
η0
n
1+
r
.
© modlab® 2007
(10)
Künstliche neuronale Netze
60
Man startet zunächst mit einer hohen Lernrate η0. Der Wert der Lernrate verringert sich im
Laufe des Trainings auf ungefähr η0 / (1 + n), wobei n die Anzahl bisher präsentierter
Trainingsbeispiele ist. Der Parameter r gibt hierbei die Stärke der Verringerung der Lernrate
in jedem Schritt an. Nach r Schritten hat sich die Lernrate halbiert. In der Praxis liefert bereits
die Verwendung dieses einfachen Verfahrens gute Ergebnisse.
Genauere Informationen zu dem Vorgehen nach Darken und Moody sowie eine Auswahl
weiterer möglicher Verfahren zur Veränderung der Lernrate während des Trainings sind in [4]
zu finden.
Die zweite erwähnte Möglichkeit, das Risiko lokaler Minima und flacher Plateaus zu
minimieren, ist die Einführung des sog. Momentum-Terms, der sich am ehesten durch
Impuls oder Trägheitsmoment übersetzen lässt. Dieses Konzept stammt aus der Physik. Im
Prinzip kann man sich den Suchraum (Fehlerfunktion) als zerklüftetes Gebirge vorstellen, mit
vielen Gipfeln und Tälern und möglicherweise auch Plateaus. Durch die Veränderung der
Gewichte bewegt man sich in diesem Suchraum von Gipfel zu Tal; der Fehler wird minimiert.
Durch die Stärke der Gewichtsänderung ist es möglich zu erkennen, wie stark das Gefälle ist.
Man stelle sich eine Kugel vor, die in dem vorhandenen Gebirge einen Hang hinunterrollt. Je
stärker das Gefälle ist, desto höher ist die Beschleunigung, die die Kugel erreicht. Erreicht die
Kugel das Tal, stoppt sie nicht sofort. Der Schwung bewirkt, dass die Bewegung erst
allmählich abklingt. Aufgrund dessen ist es mit Hilfe des Momentum-Terms möglich, flache
Plateaus zu überqueren oder zerklüftete Flächen zu passieren. Hierbei werden bei der
Berechnung der neuen Gewichtsveränderungen, die Änderungen des letzten Schrittes
berücksichtigt. Diese Änderungen wirken sich, mit einer gegebenen Stärke des Momentums,
auf die neuen Gewichtswerte aus. Mathematisch ist dies durch (11) definiert.
∆wi , j (t ) = η δ jο i + α ⋅ ∆wi , j (t − 1) , wobei
(11)
∆wi , j (t ) die Gewichtsveränderung im aktuellen Schritt, ∆wi , j (t − 1) die des vorherigen
Schrittes, δ j den Wert des unterhalb des Gewichtes liegenden Neurons j, ο i die Ausgabe des
darüber liegenden Neurons i und α den Momentum-Parameter darstellen.
Wie man anhand von (11) erkennen kann, ist die Stärke des Momentums durch den Parameter
α modifizierbar. (11) stellt also eine um das Momentum erweiterte Form von (6) dar.
Trotz der offensichtlichen Vorteile, die der Momentum-Term mit sich bringt, sollte dennoch
darauf hingewiesen werden, dass dieser auch die Gefahr birgt, durch einen hohen Schwung
© modlab® 2007
Künstliche neuronale Netze
61
aus einem besseren lokalen Optimum in ein schlechteres zu gelangen. Leider gibt es keinen
allgemeinen, problemunspezifischen Wert für Parameter α. Dessen Wert muss deswegen
durch trial-and-error Verfahren bestimmt werden.
Generell ist zu sagen, dass man beim Training neuronaler Netze eine Multistartstrategie
wählen und mehrere Netze mit verschiedenen Parametereinstellungen parallel trainieren
sollte. Die Selektion des besten Netzes ist dabei durch den RMSE (Abkürzung für root mean
square error) möglich. Dessen Berechnung ist in (12) gezeigt.
RMSE =
1 n
(t i − oi ) 2 , wobei
∑
n i =1
(12)
n die Anzahl der Trainingsbeispiele, ti der Zielwert und oi der berechnete Output-Wert des
Netzes für Trainingsbeispiel i ist.
Literatur
[1] W. Oberhofer, T. Zimerer 1996: „Wie Künstliche Neuronale Netze Lernen: Ein Blick in
die Black Box der Backpropagation Netzwerke“
http://www.fh-ansbach.de/~thomas.zimmerer/pdfs/Literatur/DP_287.pdf
[2] P. Baldi, S. Brunak 2001: „Bioinformatics - The Machine Learning Approach“, The MIT
Press, Cambridge.
[3] D. Kriesel 2005: „Ein kleiner Überblick über Neuronale Netze”
http://www.dkriesel.com/content/studium/neuronetzefiles/neuronalenetze.pdf
[4] W. Schiffmann, M.Joost, R.Werner: „Optimization of the Backpropagation Algorithm for
Training Multilayer Perceptrons”
http://www.cs.bham.ac.uk/~pxt/NC/schiffmann.bp.pdf
© modlab® 2007
Künstliche neuronale Netze
© modlab® 2007
62
Partikelschwarm-Optimierung
63
Partikelschwarm-Optimierung (PSO)
Die Idee für die PSO hat ihren Ursprung in der Simulation der Dynamik von biologischen
Systemen, wie Vogel- oder Fischschwärmen. Relativ früh schon wurde jedoch die Eignung
des
Algorithmus
als
heuristisches
Optimierungsverfahren
erkannt
und
daraufhin
weiterentwickelt. Zum ersten Mal wurden Partikelschwärme von Eberhart und Kennedy im
Jahr 1995 als Optimierungsparadigma vorgeschlagen [1, 2].
Künstliche Schwärme bestehen aus Individuen, den so genannten Agenten oder Partikeln.
Indem den Partikeln einfache Regeln vorgegeben werden, nach denen sie sich zu verhalten
haben, können verschiedene Verhaltensmuster des Schwarmes entstehen. Trotz der
Einfachheit des Regelwerkes und somit der Einfachheit des Verhaltens der einzelnen
Individuen kann das Verhalten eines Schwarmes sehr komplex und vielschichtig sein. Solche
Komplexität entwickelt sich aus der Fähigkeit der Partikel, miteinander zu interagieren.
Indem sie untereinander Informationen über ihre Umwelt und über sich selbst austauschen,
beeinflussen sie sich auch gegenseitig in ihrem Verhalten.
Durch diesen Informationsaustausch können die Partikel gegenseitig ihre „Flugrichtung“ und
„Fluggeschwindigkeit“
im
durch
das
Problem
aufgespannten
Suchraum
(oder
Fitnesslandschaft) beeinflussen. Jeder Partikel hat das Bestreben, sich auf optimale, im Raum
gefundene Punkte hinzuzubewegen, so dass sich letztlich der Schwarm gerichtet durch den
Raum bewegt und nach einiger Zeit in einer Lösung konvergiert. Eine künstliche
Optimierungslandschaft ist in Abb. 1 gezeigt.
© modlab® 2007
64
nswe
n2
s io
en
e
Funkt
io
m
Di
Dim
io
ns
rt
Partikelschwarm-Optimierung
n1
Abbildung 1: Beispiel einer Fitnesslandschaft mit vielen lokalen Maxima und Minima
(multimodale Fitnesslandschaft)
Der Algorithmus
Zu Anfang der PSO wird in dem von einem Problem aufgespannten Lösungsraum eine
bestimmte Anzahl von Partikeln generiert. Die Positionen dieser Partikel sind zunächst
zufällig gewählt, ebenso ihre Bewegungsrichtung und Geschwindigkeit. Jeder Partikel des
Schwarmes kann sich frei im Suchraum bewegen (Abb. 2).
Abbildung 2: Momentaufnahme: Partikel in einer Fitnesslandschaft, das globale Optimum ist
durch den Schnittpunkt der schwarzen Geraden mit der Lösungsoberfläche visualisiert.
Bei einem D-dimensionalen Problem wird die Position jedes Partikels – hier des i-ten
Partikels – durch einen Ortsvektor Xi = (xi1, xi2, xi3,…xiD) beschrieben. Die Geschwindigkeit
des i-ten Partikels wird analog mit einem Geschwindigkeitsvektor Vi = (vi1, vi2, vi3,…viD)
beschrieben. Da jedem Partikel durch den Ortsvektor eine Position im Lösungsraum
© modlab® 2007
Partikelschwarm-Optimierung
65
zugewiesen ist, ist es auch möglich, die jeweilige Fitness der Partikel in Bezug auf das
Problem zu bestimmen. Des Weiteren existieren zwei Arten von „Gedächtnis“ in der PSO:
•
Zum einen haben Partikel ein so genanntes „individuelles“ Gedächtnis, in dem sie
die beste Position pi abspeichern können, an der sie sich jeweils selbst im
Optimierungsprozess bis zum aktuellen Zeitpunkt befunden hat.
•
Zum anderen besitzen die Partikel ein „soziales“ Gedächtnis, das man sich auch als
„Schwarmgedächtnis“ vorstellen kann. Dieses „soziale“ Gedächtnis speichert die
Position pb ab, die bis zum aktuellen Zeitpunkt die insgesamt beste, von allen Partikeln
zusammen gefundene Position ist.
Ausgehend von diesen beiden Informationen – also den Positionen aus den individuellen
Gedächtnissen und dem sozialen Gedächtnis – sowie dem aktuellen Geschwindigkeitsvektor
werden nun für jeden Partikel neue Geschwindigkeitsvektoren berechnet.
In dem 1998 von Shi und Eberhart vorgeschlagenen PSO-Algorithmus [3] erfolgt die
Berechnung nach Gleichung 1:
v i (t + 1) = w ⋅ v i (t ) + n1 ⋅ r1 ⋅ ( p i − x i (t )) + n 2 ⋅ r2 ⋅ ( p b − x i (t )) ,
(1)
wobei t für die Epochenzahl steht, n1 und n2 Konstanten zur Gewichtung des Einflusses der
beiden Gedächtnisse auf das Schwarmverhalten sind, und r1 und r2 Zufallszahlen zwischen 0
und 1 sind. Das so genannte „Massenträgheitsgewicht“ w gewichtet den Einfluss des alten
Geschwindigkeitsvektors vi eines Partikels und dient maßgeblich der Kontrolle der
Gesamtgeschwindigkeit, mit der sich Partikel durch den Suchraum bewegen.
„Vernünftige“ Werte für die Konstanten, die jedoch von Anwendung zu Anwendung
unterschiedlich passend sein können, liegen für n1 und n2 zwischen 1 und 2, für w zwischen
0,5 und 1. Diese Angaben sind jedoch nur als Anhaltspunkte zu verstehen.
Um einer unkontrollierten, explosionsartigen Bewegung des Schwarmes vorzubeugen, wird
oftmals der maximale Wert, den der Geschwindigkeitsvektor annehmen kann, eingeschränkt.
Wird dieser maximale Wert überschritten, so wird vi auf den Grenzwert zurückgesetzt. Eine
weitere Möglichkeit, die Geschwindigkeit des Schwarmes zu kontrollieren, ist das
Massenträgheitsgewicht mit zunehmender Epochenzahl linear kleiner werden zu lassen, was
in der Regel zu einer Konvergenz des Schwarmes über die Zeit führt [4].
© modlab® 2007
Partikelschwarm-Optimierung
66
Die Positionen der einzelnen Partikel werden durch Addition des in jeder Epoche neu
errechneten Geschwindigkeitsvektors zu dem Ortsvektor neu berechnet (Gleichung 2):
xi (t + 1) = xi (t ) + vi (t + 1) .
(2)
Nach dem Update der Positionen kann ein neuer Evaluationszyklus beginnen, bis ein
Stoppkriterium (wie z.B. eine maximale Anzahl an Epochen) erreicht wird.
In Pseudocode lässt sich die PSO folgendermaßen beschreiben:
begin
Positionen und Geschwindigkeiten der Partikel initialisieren;
Fitness evaluieren;
Gedächtnisse initialisieren;
while (Abbruchbedingung ≠ true)
neue Geschwindigkeiten berechnen;
Positionen neu berechnen;
Fitness evaluieren;
Gedächtnisse auffrischen;
end
end
Zusammenfassung
Die Partikelschwarm-Optimierung ist ein biologisch motiviertes, leicht zu implementierendes
und effizientes heuristisches Optimierungsverfahren. Im Vergleich zu anderen biologisch
motivierten Optimierungsalgorithmen, wie beispielsweise genetischen Algorithmen [5], hat es
nur wenige freie Parameter, die jedoch entscheidenden Einfluss auf das Verhalten der
Schwärme haben.
PSO wurde in der Vergangenheit bereits erfolgreich für unterschiedlichste Anwendungen
eingesetzt, vom Training künstlicher neuronaler Netze bis hin zum Lösen technischer
Probleme im Ingenieurswesen.
© modlab® 2007
Partikelschwarm-Optimierung
67
Literatur
1.
Kennedy J, Eberhart RC: Particle swarm optimization. In Proceedings of IEEE
International Conference on Neural Networks; Piscataway, NJ. 1995: 1942-1948.
2.
Eberhart RC, Kennedy J: A new optimizer using particle swarm theory. In
Proceedings of the Sixth International Symposium on Micromachine and Human
Science; Nagoya, Japan. 1995: 39-43.
3.
Shi Y, Eberhart RC: Parameter selection in particle swarm optimization. In
Evolutionary Programming VII: Proceedings of the Seventh Annual Conference on
Evolutionary Programming; New York, USA. 1998: 591-600.
4.
Kennedy J, Eberhart RC: Swarm Intelligence. San Diego: Academic Press; 2001.
5.
Holland J.H.: Adaptation in natural and artificial system, Ann Arbor, The University
of Michigan Press; 1975.
© modlab® 2007
Partikelschwarm-Optimierung
© modlab® 2007
68
Ameisenalgorithmen
69
Ameisenalgorithmen
Ameisenalgorithmen stammen aus dem Gebiet der naturanalogen bzw. biologisch motivierten
Algorithmen. Das Ant Colony Optimization (ACO) Konzept wurde von Marco Dorigo
(Dorgio et al., 1996) als Metaheuristik eingeführt (http://www.aco-metaheuristic.org/). Die
Idee
des
Ameisenalgorithmus
wurde
dem
Foraging
(Futtersuche)
bestimmter
Ameisenunterfamilien nachempfunden. Diese sind in der Lage, bestehende Hindernisse
zwischen Nest und Futterquelle bei verschiedenen möglichen Wegen kurzmöglichst zu
verbinden (Deneubourg et al., 1990; Abb.1).
Abbildung 1. Zeitlicher Ablauf der Wegfindung bei Ameisen. Die Graustufe der Pfeile
spiegelt die Pheromonkonzentration wieder.
Die Ameisen verwenden zuerst alle zur Verfügung stehenden Verbindungen zwischen
Futterquelle und Nest (Abb. 1a). Über die Zeit (Abb. 1b) ist ein autokatalytischer Prozess zu
beobachten, der immer mehr Arbeiterinnen auf den kürzeren Weg zieht, bis schlussendlich
(Abb. 1c) alle Wege außer dem kürzesten ignoriert werden. Diese Lösung eines natürlichen
Optimierungsproblems ist unter den folgenden Gesichtspunkten für die Informatik interessant:
© modlab® 2007
Ameisenalgorithmen
70
•
Keine übergeordnete Intelligenz (Königin) steuert die Ameisen.
•
Einzelne Ameisen haben kein Problembewusstsein.
•
Die optimale Lösung wird gefunden.
•
Die Ameisen kooperieren, um eine Lösung zu finden.
Der Aspekt der Kooperation ist von entscheidender Bedeutung. Den Ameisen ist es möglich,
über abgegebene Duftstoffe (Pheromone) über ihre Umwelt als Medium zu kommunizieren.
Diese Kommunikation über eine Veränderung der Umwelt, um einem gemeinsamen Ziel zu
folgen, bezeichnet man als Stigmergie, eingeführt von Grassé 1959 für Termiten (Grassé, P.
P. & Noirot, C., 1959; Theraulaz, G. & Bonabeau, E., 1999). Die Ameisen lösen das in Abb.1
gezeigte Weg-Problem mit Hilfe von Pheromonen (Deneubourg et al., 1990). Auf dem
kürzeren Weg wandern pro Zeit mehr Ameisen als auf dem längeren Weg, wodurch die
Pheromonkonzentration auf diesem schneller anwächst (bzw. weniger abnimmt). Die aus dem
Nest nachfolgenden Ameisen werden durch die Pheromonkonzentration hinsichtlich ihrer
Entscheidung für einen Weg zur Futterquelle beeinflusst. Die kürzere Route wird durch die
höhere Pheromonkonzentration mit einer gewissen Wahrscheinlichkeit bevorzugt.
Einzelne gleichartige Individuen werden also über eine Kommunikationsschnittstelle
verbunden und dadurch in die Lage versetzt, Probleme zu lösen. Es entsteht eine Lösung aus
dem System, die über die Fähigkeiten der einzelnen Ameisen hinausgeht (Emergenz). Dies
wird
durch
die
Ameisenalgorithmen
für
die
Informatik
im
Bereich
von
Optimierungsproblemen adaptiert. Ameisen werden formal zu „Agenten“. Der Aspekt der
Pheromone wird 1:1 übernommen.
Ameisenalgorithmen in der Anwendung
ACS (Ant Colony System) für das Travelling Salesman Problem nach Dorigo &
Gambardella (1997).
Im Problem des Handlungsreisenden (TSP) geht es darum, eine möglichst kurze Rundreise
zwischen verschiedenen Städte zu organisieren, wobei jede Stadt nur einmal besucht werden
darf. Ein Beispiel ist in Abb.2 zu sehen.
© modlab® 2007
Ameisenalgorithmen
71
Abbildung 2. Vollständiger verbundener Graph für das TSP Problem. Alle Kanten haben
unterschiedliche Gewichte (zufällig) alle Knoten eindeutige Bezeichnungen.
In Abb.2 stellen Knoten, Städte und Kanten, Straßen mit unterschiedlichem Gewicht (Länge)
entsprechen. Ein Agent (k) startet nun in einer zufälligen Stadt und wählt von dieser Stadt (r)
die nächste noch nicht besuchte Stadt (s) entsprechend Gleichung (1).
{
arg max [τ (r , u )] ⋅ [η (r , u )]β
u∉M k
s=
S
}
wenn q ≤ q0
, wobei
(1)
sonst
τ (r, u ) der Pheromonkonzentration auf der Kante zwischen Stadt r und u entspricht. η (r, u )
ist eine heuristische Funktion, invers zu der Distanz zwischen den Städten r und u. β
gewichtet die relative Bedeutung der Pheromonspur sowie die Entfernung (Kantengewicht)
zwischen den Städten. q wird mit gleichverteilter Wahrscheinlichkeit aus [0,1] gezogen, q 0
ist ein Parameter, S ist eine zufällig nach Gleichung 2 belegte Variable.
[τ (r , s )] ⋅ [η (r , s )]β
β
pk (r , s ) = ∑ [τ (r , u )] ⋅ [η (r , u )]
u ∉M k
0
wenn s ∉ M k
.
(2)
sonst
Die Formel bevorzugt Kanten mit einer stärkeren Pheromonspur und geringerem Gewicht
(Länge). Die Idee ist, dass der Agent mit einer Wahrscheinlichkeit von q 0 die Möglichkeit
hat, auf das kollektive Gedächtnis zuzugreifen, oder mit einer Wahrscheinlichkeit von
1 − q 0 eine „eigene“ Stadt nach den Vorgaben von Gleichung 2 zu wählen. Für eine
weiterführende Beschreibung des Pheromonupdates (globales, lokales) sei auf Dorigo &
Gambardella (1997) verwiesen.
© modlab® 2007
Ameisenalgorithmen
72
Ein Applet für TSP nach dem ACO Konzept ist hier zu finden:
http://www.geocities.com/andres_perezuribe/
Es ist zu beachten, dass das hier verwendete Pheromonupdate explizit auf die Problemstellung
zugeschnitten ist. Das ACO Konzept lässt sich jedoch auf eine weites Spektrum von
Optimierungsproblemen anwenden. Für eine Auflistung möglicher Anwendungen sei auf
Dorigo & Stützle, 2004 verwiesen. Die Herausforderung bei der Anwendung von ACO liegt
darin,
a) eine geeignete Methode des Pheromonupdates zu finden, und
b)
das „Pfad“-Konzept an die Problemstellung anzupassen.
Naheliegende Anwendungen sind Verkehrssimulationen oder Routing Probleme. Auch die
Möglichkeit der Modellierung biologischer Systeme (echter Ameisen) stellt eine mögliche
Anwendung da.
Literatur
Deneubourg, J-L., Aron, S., Goss, S. & Pasteels, J.M. (1990). The self-organizing exploratory
pattern of the Argentine ant. Journal of Insect Behavior 3: 159-168.
Dorigo, M., Maniezzo, V. & Colorni, A. (1996). Ant system: optimization by a colony of
cooperating agents. IEEE Transactions on Systems, Man, und Cybernetics-Part B. 26: 29-41.
Dorigo M. & Gambardella, L.M. (1997). Ant Colonies for the Traveling Salesman Problem.
BioSystems 43:73-81. Also Tecnical Report TR/IRIDIA/1996-3, IRIDIA, Université Libre de
Bruxelles.
Dorigo, M. & Stützle, T. (2004). Ant Colony Optimization. The MIT Press, Cambridge,
Massachusetts.
Grassé, P. P. & Noirot, C. (1959). The development of symbiosis in Isoptera. Experientia 15:
365-72.
Theraulaz, G. & Bonabeau, E. (1999). A brief history of stigmergy. Artificial Life 5: 97-116.
© modlab® 2007