Grundlagen der Elektrotechnik
Werbung

Skriptum zu den
Grundlagen
der
Elektrotechnik
von Prof. Dr. rer. nat. Hartmann
Bearbeitet von:
Thorsten Parketny
Stand: 02.10.2002
i
Inhaltsverzeichnis
1. Grundbegriffe und Werkzeuge ................................................1
1.1. Elektrische Ladungen ............................................................................. 1
1.2. Kraftwirkungen zwischen Ladungen ...................................................... 2
1.3. Der Begriff Feld ...................................................................................... 3
1.4. Werkzeuge für den Umgang mit Vektorfeldern ..................................... 6
1.4.1 Der Fluß eines Vektorfeldes ......................................................................................6
1.4.2 Die Zirkulation eines Vektorfeldes ...........................................................................11
2. Der Stromkreis ..........................................................................16
2.1. Bewegte Ladungen ................................................................................. 16
2.2. Quellen .................................................................................................... 17
2.3. Stromstärke und Stromdichte ................................................................. 18
2.4. Potentielle Energie einer Ladung und Spannung ................................... 20
2.5. Metallische Leiter ................................................................................... 21
2.5.1 Leitungsmechanismen ...............................................................................................21
2.5.2 Anwendung des Ohm‘schen Gesetzes ......................................................................22
2.5.3 Temperaturabhängigkeit des Widerstandes ..............................................................23
3. Gleichstromschaltungen ...........................................................25
3.1. Strom und Spannung im einfachen Stromkreis ...................................... 25
3.2. Zweipole ................................................................................................. 27
3.3. Die Kirchhoffschen Regeln .................................................................... 28
3.4. Serien- und Parallelschaltung von Widerständen ................................... 31
3.4.1 Serienschaltung .........................................................................................................31
3.4.2 Parallelschaltung .......................................................................................................32
3.4.3 Einfache Widerstandsnetzwerke ...............................................................................33
3.5. Ersatzquelle ............................................................................................ 33
3.5.1 Ersatzspannungsquelle ..............................................................................................33
3.5.2 Ersatzstromquelle ......................................................................................................35
3.5.3 Allgemeine Ersatzquelle ...........................................................................................36
3.5.4 Spannungsteiler .........................................................................................................37
3.6. Energieumsetzung im Stromkreis ........................................................... 39
3.6.1 Energie und Leistung ................................................................................................39
3.6.2 Leistungsanpassung und Wirkungsgrad ....................................................................41
3.7. Schaltung mit nichtlinearen Zweipolen .................................................. 42
4. Lineare Netzwerke ....................................................................45
4.1. Definition linearer Netze ........................................................................ 45
4.2. Darstellung linearer Netze durch Graphen ............................................. 46
4.3. Können beliebige lineare Netze berechnet werden? ............................... 48
4.3.1 Wieviele Gleichungen sind notwendig? ....................................................................48
4.3.2 Gibt es genügend unabhängige Gleichungen? ..........................................................48
4.3.3 Gibt es einer optimale Strategie? ..............................................................................51
4.4. Netzwerkstopologie ................................................................................ 51
4.4.1 Der vollständige Baum ..............................................................................................51
4.4.2 Die Baumzweigspannungen als unabhängige Variablen ..........................................52
4.4.3 Die Verbindungszweigströme als unabhängige Variablen .......................................53
GET-Skript
ii
4.5. Maschenanalyse ...................................................................................... 54
4.5.1 Schritte des Rechenverfahrens ..................................................................................54
4.5.2 Herleitung des Gleichungssystems ............................................................................55
4.5.3 Unmittelbare Aufstellung des Gleichungssystems ....................................................58
4.5.4 Berechnung eines Beispiels........................................................................................62
4.6. Knotenanalyse ........................................................................................ 64
4.6.1 Schritte des Rechenverfahrens ..................................................................................64
4.6.2 Herleitung des Gleichungssystems ............................................................................65
4.6.3 Unmittelbare Aufstellung des Gleichungssystems ....................................................68
4.6.4 Berechnung eines Beispiels: ......................................................................................70
4.7. Berechnung von Netzwerken nach dem Überlagerungsprinzip ............. 73
5. Elektrostatik ..............................................................................77
5.1. Vereinfachung der Grundgesetze für die Elektrostatik .......................... 77
5.2. Berechnung symmetrischer Felder ......................................................... 78
5.2.1 Das E -Feld einer Punktladung .................................................................................78
5.2.2 Feld einer „Linienladung“ .........................................................................................81
5.2.3 Feld einer gleichförmigen Flächenladung ................................................................83
5.3. Berechnung beliebiger Felder mit bekannter Ladungsverteilung ........... 84
5.3.1 Superposition der E -Felder aller Einzelladungen ....................................................84
5.3.2 Superposition der Potentiale aller Einzelladungen ....................................................85
5.4. Das elektrostatische Potential ϕ .............................................................. 86
5.4.1 Arbeit einer im E -Feld bewegten Ladung ................................................................86
5.4.2 Potential einer Punktladung ......................................................................................87
5.4.3 Potential beliebiger, bekannter Ladungsverteilungen ...............................................89
5.4.4 Das E -Feld als Gradient des Potentials ...................................................................90
5.5. Berechnung von E -Feldern bei unbekannter Ladungsverteilung ........... 92
5.6. Kapazität und Influenzerscheinungen .................................................... 94
5.6.1 Definition der Kapazität ............................................................................................94
5.6.2 Schaltungen mit Kondensatoren ................................................................................95
5.7. Influenz und Verschiebungsdichte D ...................................................... 96
5.8. Energie im elektrischen Feld .................................................................. 98
5.8.1 Die Gesamtenergie elektrostatischer Systeme ..........................................................98
5.8.2 Berechnung von Kräften aus der Gesamtenergie ......................................................99
5.8.3 Das E -Feld als Sitz der elektrostatischen Energie ....................................................100
5.9. Der elektrische Dipol .............................................................................. 101
5.9.1 Kräfte und Drehmomente am elektrischen Dipol .....................................................101
5.9.2 Potential und E -Feld des Dipols ...............................................................................102
5.10. Materie im elektrischen Feld ................................................................ 103
5.10.1
5.10.2
5.10.3
5.10.4
Dielektrika ..............................................................................................................103
Die Polarisation ......................................................................................................105
E -Feld und Verschiebungsdichte D im Dielektrikum ..........................................106
Felder an Grenzflächen von Dielektrika ................................................................108
6. Magnetostatik ............................................................................111
6.1. Vereinfachung der Grundgesetze für die Magnetostatik ........................ 111
6.2. Die Lorentz-Kraft ................................................................................... 112
6.2.1 Regeln für den Umgang mit äußeren Vektorprodukten (Kreuzprodukten) ..............112
iii
Inhaltsverzeichnis
6.2.2 Kraft auf stromdurchflossende Leiter .......................................................................114
6.2.3 Drehmoment auf stromdurchflossenen Schleifen im homogenen Feld B ................115
6.3. Berechnung von B -Feldern .................................................................... 117
6.3.1 Es gibt keine magnetischen Ladungen ......................................................................117
6.3.2 Durchflutungsgesetz, Ampere‘sches Gesetz .............................................................117
6.3.3 Berechnung symmetrischer Felder aus dem Durchflutungsgesetz ...........................118
6.3.4 Berechnung beliebiger Magnetfelder mit bekannter Stromverteilung
(Biot-Savart‘sches Gesetz) ................................................................................................122
6.4. Materie im magnetischen Feld ............................................................... 123
6.4.1 Magnetische Werkstoffe und deren Eigenschaften ...................................................123
6.4.2 Der Magnetisierungsvektor ......................................................................................124
6.4.3 Magnetische Induktion B und Magnetfeld H in Materie ........................................126
6.4.4 Diamagnetismus, Paramagnetismus, Ferromagnetismus ..........................................127
6.5. Der magnetisc .......................................................................................... 130
6.5.1 Die Konstanz des magnetischen Flusses ..................................................................130
6.5.2 Das „sog. Ohm‘sche Gesetz des magnetischen Kreises“ ..........................................131
6.5.3 Berechnung magnetischer Kreise ..............................................................................132
7. Elektrodynamik .........................................................................135
7.1. Die Grundgesetze der Elektrodynamik ................................................... 135
7.2. Die Induktionsvorgänge ......................................................................... 136
7.2.1 Der im Magnetfeld bewegte Leiter ...........................................................................136
7.2.2 Änderung des magnetischen Flusses in
Leiterschleifen.....................................................................................................................137
7.2.3 Induktionsgesetz und Flußregel ................................................................................139
7.2.4 Anwendung des Induktionsgesetzes ..........................................................................140
7.3. Selbstinduktion und Gegeninduktion ..................................................... 142
7.3.1 Selbstinduktion ..........................................................................................................142
7.3.2 Gegeninduktion .........................................................................................................143
7.3.3 Abschätzung von Induktivitäten ................................................................................144
7.4. Energie im magnetischen Feld ............................................................... 145
7.4.1 Die magnetische Energie einer stromdurchflossenen Spule .....................................145
7.4.2 Energie mehrerer (gekoppelter) Spulen ...................................................................146
7.4.3 Das magnetische Feld als Sitz der magnetischen Energie ........................................148
7.4.4 Energieverluste durch Ummagnetisierung ................................................................149
7.4.5 Berechnung von Kräften aus der magnetischen Energie ..........................................150
7.5. Wirbelströme .......................................................................................... 151
7.6. Der Verschiebungsstrom und sein Magnetfeld ...................................... 152
8. Stromkreis im quasistationären Zustand ................................154
8.1. Der quasistationäre Zustand ................................................................... 154
8.2. Idealisierte Bauelemente und Quellen .................................................... 155
8.2.1 Ideale Induktivität .....................................................................................................155
8.2.2 Ideale Kapazität .........................................................................................................156
8.2.3 Idealer Widerstand ....................................................................................................157
8.2.4 Idealer Generator .......................................................................................................158
8.2.5 Kirchhoff‘schen Gleichungen im quasistationären Fall ............................................159
8.2.6 Reale Bauelemente und deren Ersatzschaltung .........................................................160
GET-Skript
iv
9. Lineare Netze im eingeschwungenen Zustand .......................163
9.1. Zeitveränderliche Vorgänge ................................................................... 163
9.2. Wichtige Mittelwerte .............................................................................. 165
9.2.1 Arithmetischer Mittelwert .........................................................................................165
9.2.2 Gleichrichtwert ..........................................................................................................166
9.2.3 Effektivwerte .............................................................................................................167
9.2.4 Weitere Definitionen .................................................................................................167
9.3. Zeigerdarstellung .................................................................................... 168
9.3.1 Drehzeiger .................................................................................................................168
9.3.2 Zeigerdiagramm ........................................................................................................168
9.4. Darstellung sinusförmiger Vorgänge in der komplexen Ebene .............. 171
9.4.1 Rechnen mit komplexen Zahlen ................................................................................171
9.4.2 Komplexe Schwingung, komplexe Amplitude .........................................................173
9.4.3 Rechenvorteile bei komplexer Schreibweise .............................................................174
9.4.4 Neue Beschreibung sinusförmiger Wechselgrößen ..................................................175
9.5. Ideale Schaltelemente im Wechselstromkreis ........................................ 177
9.5.1 Der ohm‘sche Widerstand .........................................................................................177
9.5.2 Die Induktivität .........................................................................................................177
9.5.3 Der Kondensator .......................................................................................................178
9.5.4 Frequenzabhängige Widerstände ..............................................................................179
9.6. Netzwerke aus komplexen Widerständen ............................................... 180
9.6.1 Komplexer Widerstand und komplexer Leitwert ......................................................180
9.6.2 Serien- und Parallelschaltung komplexer Widerstände ............................................182
9.7. Ortskurven .............................................................................................. 184
9.8. Wechselstrommeßbrücken ...................................................................... 189
9.8.1 Maxwellbrücke ( Z ind ) ..............................................................................................190
9.8.2 Frequenzmeßbrücke nach Wien-Robinson ..............................................................191
9.9. Schwingkreise ......................................................................................... 192
9.10. Leistung im Wechselstromkreis ........................................................... 200
9.10.1
9.10.2
9.10.3
9.10.4
Zeitabhängige Leistung ..........................................................................................200
Spezialfälle: Rein ohm‘sche, induktive oder kapazitive Schaltelemente ...............201
Beliebige Impedanz ................................................................................................202
Die Scheinleistung S ..............................................................................................203
10. Lineare Zweipole und Zweitore .............................................206
10.1. Grundüberlegung .................................................................................. 206
10.2. Leistungsberechnung an linearen Zweipolen ....................................... 207
10.3. Leistungsanpassung bei Zweipolen ...................................................... 208
10.4. Beschreibung von Vierpolen durch Matrizen ....................................... 209
10.4.1
10.4.2
10.4.3
10.4.4
10.4.5
10.4.6
Die Widerstandsmatrix ...........................................................................................210
Die Leitwertmatrix .................................................................................................212
Die Kettenmatrix ....................................................................................................214
Die Reihen-Parallelmatrix ......................................................................................216
Die Parallel-Reihenmatrix ......................................................................................217
Umrechnung der Matrizen und ............................................................................218
10.5. Zusammenschaltung von Zweitoren ..................................................... 221
10.5.1 Reihenschaltung .....................................................................................................221
v
10.5.2
10.5.3
10.5.4
10.5.5
10.5.6
Inhaltsverzeichnis
Parallelschaltung ....................................................................................................222
Reihen-Parallelschaltung ........................................................................................223
Parallel-Reihenschaltung ........................................................................................224
Kettenschaltung ......................................................................................................224
Beispiele und Anwendungsgrenzen .......................................................................225
10.6. Der Übertrager (Transformator) ........................................................... 228
10.6.1
10.6.2
10.6.3
10.6.4
10.6.5
Beschreibung durch und .......................................................................................228
Ersatzschaltbild des verlustfreien Übertragers .......................................................230
Der Übertrager mit Eisenkern ................................................................................235
Übertrager mit Verlusten ........................................................................................236
Die Transformationseigenschaften des Übertragers ..............................................237
Grundbegriffe und Werkzeuge
1
Seite 1
Grundbegriffe und Werkzeuge
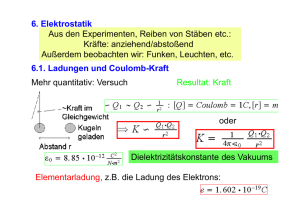
1.1 Elektrische Ladungen
Bewegte Ladungsträger nennt man „elektrischen Strom“ (analog:
bewegtes Wasser = Wasserstrom, bewegte Luft = Luftstrom)
Ladungsträger: Elektron, Proton mit
Elementarladung ± e = ±1.602 mal 10 -19 As (Coulomb)
Protonen + Neutronen bilden positive Atomkerne,
Elektronen bilden die negative Hülle
Wenn gleichviele Protonen und Elektronen → neutrale Atome
Wenn im Atom Elektronen fehlen oder überzählig sind → Ionen
-e
+
p
-e
+
+
p
p
e
H-Atom
H+-Ion
H--Ion
In der Elektrotechnik von praktischer Bedeutung:
- Elektronenströme (Metalle, Halbleiter, Vakuumröhren)
- Ionenströme (Flüssigkeiten, Gase, Schmelzen)
- Löcher (Halbleiter)
Aufbau der Materie ist viel komplizierter und es kommen weitere
Elementarteilchen hinzu, z.B. :
Mesonen: neutral, ± e
Quarks: ± 2/3 e usw.
In der Elektrotechnik kann es nur Ladungsmengen q geben, die ein
ganzzahliges Vielfaches der Elementarladung ±e betragen, also
q = n⋅e
Seite 2
GET-Skript
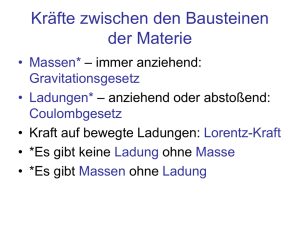
1.2 Kraftwirkungen zwischen Ladungen
Kräfte auf ruhende Ladungen
q1 ⋅ q2
- (Coulomb‘sches Gesetz)
elektrostatische Kräfte F ∼ -------------2
r 12
r12
-q
2
+
q1
F1
F2
m1 ⋅ m2
- ,
Ähnlich wie Gravitation F ∼ ----------------2
r 12
jedoch bei elektrischen Ladungen
- zwei Arten von Ladung (+ und -)
- ungleiche Ladungen ziehen sich an, gleiche stoßen sich ab
- Kräfte viel, viel ... viel größer als bei Gravitation.
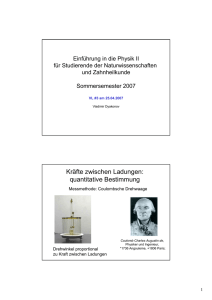
1m
F
F
Jedem fehlt 1% der Elektronen. F entspricht Gewicht der Erde
Normalerweise sind elektrostatische Kräfte dieser Größenordnung
nicht zu bemerken. Das Gleichgewicht zwischen positiven und negativen Ladungen ist sehr gut austariert
Also: keine äußeren Kräfte. Bei Ungleichgewicht wird Ausgleich
durch Ströme angestrebt.
Beispiele für elektrostatische Kräfte:
- Elektron/Atomkern
- Molekülkräfte
- Abstoßende Kräfte zwischen Protonen (was hält dann Atomkern zusammen?)
Grundbegriffe und Werkzeuge
Kräfte auf bewegte Ladungen.
Diese Kräfte heißen elektromagnetische Kräfte. Sie hängen in
komplizierter Weise von der Ladung und deren Bewegung ab.
Frage: Gibt es jemals eine Chance, die Kräfte zwischen vielen,
evtl. bewegten Ladungen nach Betrag und Richtung auszurechnen?
Antwort: Ja, wenn man den Begriff Feld einführt.
1.3 Der Begriff Feld
Die Kraft F auf eine Ladung q ist gegeben durch
-
die Größe (Menge) der Ladung q
die Geschwindigkeit v der Ladung q
das elektrische Feld E am Ort q
das magnetische Feld B am Ort q
Die Kraft F auf eine Ladung q wird beschrieben durch die sog.
Lorentz-Beziehung
F = q ⋅ (E + v × B)
Wir interessieren uns also für die Kraft auf eine der vielen Ladungen, also für die Kraft auf q. Der Einfluß aller anderen Ladungen
läßt sich zusammenfassen zu:
- einem Vektor E am Ort der Ladung q und
- einem Vektor B am Ort der Ladung q
Kennt man die Vektoren E und B am Ort der untersuchten Ladung
q, so kennt man die Kräfte, die die Ladung q in Bewegung setzen
wollen, also die Ursache für den Strom.
Neue Frage:
Wie berechnet man die Vektoren E und B am Ort der Ladung q
bei einer komplizierten Verteilung der restlichen Ladungen?
Antwort:
Es gilt das Superpositionsprinzip (Überlagerungsprinzip), eines
der wichtigsten vereinfachenden Prinzipien der Physik.
Seite 3
Seite 4
GET-Skript
Es gilt:
E = E 1 + E 2 + E 3 + ... + E n
B = B 1 + B 2 + B 3 + ... + B n
q1
q3
B
q2
v
q
E
q4
qn
Bei unserer bisherigen Betrachtung diente E und B nur zur Beschreibung der Kraftwirkungen aller anderen Ladungen auf die
eine betrachtete Ladung q.
- E und B hängt also ab von der Verteilung aller anderen Ladungen ohne q
- Es wurde vorausgesetzt, daß die Verteilung aller anderen Ladungen nicht dadurch beeinflußt wird, an welchem Ort sich q
befindet
Frage:
Was bleibt am Ort (x,y,z) der betrachteten Ladung q, wenn man
diese wegnimmt?
Antwort:
E und B am Ort (x,y,z) der weggenommenen Ladung bleiben unverändert. Man kann also E und B an jedem Ort (x,y,z) ausrechnen bzw. messen
Definition:
Eine Größe, die man an jedem Punkt des Raumes (x,y,z) berechnen
bzw. messen kann, heißt Feld. Ein Feld ist also eine Funktion des
Ortes (x,y,z), eventuell auch eine Funktion der Zeit t. Man schreibt
deshalb:
E = E (x,y,z) bzw. E = E (x,y,z,t) und
B = B (x,y,z) bzw. B = B (x,y,z,t)
Grundbegriffe und Werkzeuge
Seite 5
Beispiel: Temperaturfeld (skalares Feld)
y
T=T(x0,y0,z0)=14 °C
z
y0
z0
x
x0
Es gibt eine skalare Funktion T = T(x,y,z). Sie hat für den Punkt
(x0,y0,z0) den Wert T = T(x0,y0,z0) = 140C. T kann eventuell von
der Zeit t abhängen, also T = T(x,y,z,t)
Beispiel: Geschwindigkeitsfeld (Vektorfeld)
y
v
y0
x0
x
Es gibt eine Vektorfunktion v = v (x,y,z). Diese Geschwindigkeitsfunktion v hat z.B. an der Wasseroberfläche z0=0 und am Ort
(x0,y0,z0) den Wert v = v (x0,y0,0) = (0.5m/s, 0.1m/s, 0m/s).
v kann eventuell von der Zeit t abhängen, also v = v (x,y,z,t).
Das elektrische Feld E (Vektorfeld) ist eine Vektorfunktion von
( x, y, z ) und evtl. von der Zeit t , also
E = E ( x, y, z ) bzw. E = E ( x, y, z, t )
Das magnetische Feld B (Vektorfeld) ist eine Vektorfunktion von
( x, y, z ) und evtl. von der Zeit t , also
B = B ( x, y, z ) bzw. B = B ( x, y, z, t )
Anschauliche Hilfsmittel (immer unzulänglich, weil auf eine Auswahl von Koordinaten in der Papierebene beschränkt):
Seite 6
GET-Skript
- Vektoren an jeden Punkt zeichnen (nur bedingt möglich)
- „Feldlinien“ als Tangenten an Vektoren (Feldliniendichte entspricht der Größe des Betrags).
1.4 Werkzeuge für den Umgang mit Vektorfeldern
1.4.1 Der Fluß eines Vektorfeldes
Gedankenversuch: Wir setzen eine Fläche aus Maschendraht in
strömendes Wasser, also in ein Strömungsfeld v .
Frage: Welche Wassermenge fließt pro Zeit durch diese Fläche A
im Strömungsfeld v (Fluß)?
Zunächst eine Masche mit Fläche δ A .
n
δA
Da eine Fläche eine Größe δ A und eine Orientierung im Raum hat,
die man mit der Richtung eines auf der Fläche senkrechten Vektors
n (Flächennormale, Länge 1) angeben kann, ist sie beschrieben
durch den Vektor δ A mit
δ A = n ⋅ δA
δA
Bei Strömung v senkrecht zur Fläche, d. h. v || δ A , ist dann die
Menge pro Zeit
Menge
----------------- = Ψ = v ⋅ δ A
Zeit
δA
v
Grundbegriffe und Werkzeuge
Seite 7
Bei Strömung v in beliebiger Richtung zur Fläche δ A wird die
Menge pro Zeit ebenfalls durch das innere Produkt v ⋅ δ A richtig
beschrieben.
Ψ = v ⋅ δ A = v ⋅ δ A ⋅ cos α
v
α
δA
Der Fluß durch die gesamte Fläche A = ∑ δ A i ergibt sich durch
Aufsummieren der Teilflüsse durch alle Maschen i
vi
Α
α
δ Ai
Durch die i-te Masche fließt Ψ i = v i ⋅ δ A i
insgesamt fließt
Ψ =
∑ Ψi
i
=
∑ vi ⋅ δ Ai
i
und bei unendlich kleinen Maschen geht die Summe in ein Integral
über. Der Fluß wird dann beschrieben durch:
Ψ =
∫ v ⋅ d A oder ψ
A
=
∫ ∫ v ⋅ dA
A
Seite 8
GET-Skript
Anschauliche Einführung des Flußintegrals
Herkömmliche Integrale
f(x)
fi
Flußintegrale
ψi
δ Ai
vi
Fi
a
b
δx i
Teilfläche: F i = f i ⋅ δx i
Fläche:
F =
Α
x
∑ f i ⋅ δx i
Teilfluß:
ψ i = vi ⋅ δ Ai
Fluß:
ψi =
bei
δ Ai → 0
i
δx i → 0
bei
unendlich viele Streifen,
keine Nummern, dafür
Bezeichnung des
Integrationsgebiets
(hier Intervall a . . . b )
statt
∑
→∫
unendlich viele Maschen,
keine Nummern, dafür
Bezeichnung des
Integrationsgebiets
(hier Fläche A)
statt
statt δ → d
∑i vi ⋅ δ Ai
∑
→∫
statt δ → d
b
also:
F =
∫ f ⋅ dx
also:
ψ =
A
a
f ist Funktion von ( x ) , also
auf einem eindimensionalem
Gebiet definiert,
eigentlich: F =
b
∫a f ( x ) ⋅ d x
∫ v ⋅ dA
v ist Funktion von (x, y, z) , also
auf einem dreidimensionalen
Gebiet definiert,
eigentlich ψ =
∫ v(x, y, z) ⋅ d A
A
Grundbegriffe und Werkzeuge
Seite 9
In dieser Vorlesung ist keine allgemeine Berechnung solcher Integrale erforderlich. Es werden nur zwei Spezialfälle berechnet:
Spezialfall 1:
v || d A und v = const. auf dem gesamten Integrationsgebiet,
d. h. Vektor v steht im gesamten Integrationsgebiet A
0
senkrecht auf der Oberfläche ( α = 0 ) . Dann ist
v ⋅ d A = v ⋅ dA ⋅ cos α = v ⋅ dA
und weil v = const. auf A , ist
∫A v d A
= v ⋅ ∫ dA .
A
Weil Summe aller Flächenelemente d A des Gebiets A eben
gerade die Fläche des Gebiets ergibt, ist ∫ d A = A
A
also:
∫A v d A
= v ⋅ A für v || A und v = const. auf A
Spezialfall 2:
v ⊥ d A auf dem gesamten Integrationsgebiet,
d. h. der Vektor v liegt im gesamten Integrationsgebiet A in
°
der Oberfläche ( α = 90 ) . Dann ist
v ⋅ d A = v ⋅ dA ⋅ cos α = 0
also:
∫ vdA
= 0 für v⊥ A
A
Häufig interessiert man sich für den Fluß durch geschlossene Hüllflächen A
Vereinbarung:
Flächennormale n , und damit der Vektor δ A jeder Masche zeigt
immer nach außen.
Seite 10
GET-Skript
Beispiel: Kasten aus Maschendraht im Strömungsfeld v
a) Fluß durch eine geschlossene Hüllfläche ohne Quelle:
Α2
Α1
v
δA
Α
∫ dA
=
A
Ψ1 =
∫ dA + ∫ dA
A1
A2
∫A v ⋅ d A ;
1
Ψ2 =
∫A v ⋅ d A
= –ψ 1
2
Ψ1 + Ψ2 = Ψ =
°A∫ v ⋅ d A
Fluß ohne Quelle
= 0
Durch den Ring im Integral wird angedeutet, daß das Integrationsgebiet eine geschlossene Hüllfläche ist
b) Fluß durch eine geschlossene Hüllfläche mit Quelle:
v
δA
Α
ψ =
°A∫ v ⋅ d A ≠ 0
Fluß mit Quelle
Grundbegriffe und Werkzeuge
Seite 11
Der Fluß eines Vektorfeldes v durch eine geschlossene Fläche A
zeigt also an, ob sich in A eine
- Quelle ( ψ > 0 ) befindet, oder eine
- Senke ( ψ < 0 ) , oder ob A ganz einfach
- durchflossen wird ( Ψ = 0 )
1.4.2 Die Zirkulation eines Vektorfeldes
+
r0
F0
Seiltrommel als „anschauliches“ Vektorfeld.
Man kann an jedem Punkt der Trommel die Kraftrichtung und
Größe der Kraft messen. Also: Vektorfeld F = F ( x, y, z )
Besser wählt man hier Zylinderkoordinaten: F = F ( r, x, ϕ )
- Dann ist Kraftrichtung immer tangential an Kreise.
- Die Größe der Kraft hängt nur von dem Radius r ab.
Gesucht: Arbeit bei Bewegung längs eines Weges Γ .
Seite 12
GET-Skript
Anschauliche Einführung des Linienintegrals
Herkömmliche Integrale
f(x)
fi
Linienintegrale
b
δs i
.
Fi
δs 1
a
b
δx i
Teilfläche: F i = f i ⋅ δx i
Fläche
F =
F1
x
∑ f i ⋅ δx i
a
Teilarbeit: W i = F i ⋅ δs i
Arbeit längs Γ : W =
i
i
(hier F:= Fläche)
(hier F:= Kraft)
δx i → 0
bei
unendlich viele Streifen,
keine Nummern, dafür
Bezeichnungen des
Integrationsgebiets
(hier Intervall a . . . b )
statt
∑
→∫
δs i → 0
bei
unendlich viele Schritte,
keine Nummern, dafür
Bezeichnung des
Integrationsgebiets
(hier Γ = Weg a → b )
statt
statt δ → d
∑
→∫
statt δ → d
b
also:
F =
b
∫ f ⋅ dx
a
f ist Funktion von ( x ) , also
auf einem eindimensionalem
Gebiet definiert,
eigentlich: F =
∑ F i ⋅ δs i
b
∫a f ( x ) ⋅ d x
also: W =
∫ F ⋅ ds = ∫Γ F ⋅ ds
a
F ist Funktion von( ( x, y, z ) ), also
auf einem dreidimensionalen
Gebiet definiert,
eigentl.: W =
oder: W =
b
∫a F ( x, y, z ) ⋅ ds
∫Γ F ( x, y, z ) ⋅ ds
Grundbegriffe und Werkzeuge
Seite 13
In dieser Vorlesung ist keine allgemeine Berechnung solcher Integrale erforderlich. Es werden nur zwei Spezialfälle berechnet:
Spezialfall 1:
F || ds und F = const. auf Weg Γ , d.h. längs des gesamten Integrationsweges Γ stimmt Richtung von F und ds überein und
°
der Winkel zwischen F und ds ist Null ( α = 0 ) . Dann ist
F ⋅ ds = F ⋅ ds ⋅ cos α = F ⋅ ds
und weil F = const. auf Γ , ist
∫Γ F ⋅ ds
= F ⋅ ∫ ds
Γ
Weil die Summe aller Wegelemente ds desWeges Γ also
∫ ds gerade der Gesamtweg ist, gilt:
Γ
∫Γ F ⋅ ds
= F ⋅ Gesamtweg für F || ds und F = const.
Spezialfall 2:
°
F ⊥ ds d.h. längs des gesamten Integrationsweges ist α = 90 .
Dann ist
F ⋅ ds = F ⋅ ds ⋅ cos α = 0 und
∫Γ F ⋅ ds
= 0 für F ⊥ ds
Häufig interessiert man sich für Linienintegrale längs eines geschlossenen Weges Γ , also z.B. für ∫
F ⋅ ds
Γ = geschlossenerWeg
Man schreibt statt „geschlossener Weg“ ein Ringsymbol in das Integralzeichen, also ∫ F ⋅ ds
°Γ
Mit diesen Grundkenntnissen über Linienintegrale können wir zurückkommen zu dem anschauliches Beispiel für ein Vektorfeld,
zur Seiltrommel. Hier ist
Seite 14
GET-Skript
- die Richtung der Kraft F immer tangential und
- der Betrag F der Kraft F nur von r abhängig. Dieser Betrag der
Kraft läßt sich aus dem Drehmoment bestimmen:
F ( r ) ⋅ r = const = F 0 ⋅ r 0 und damit F ( r ) = F 0 ⋅ r 0 ⁄ r
a) Umlauf auf geschlossenem Kreis mit Radius r
δs i + r
F(r)
Hier gilt Spezialfall 1,
- weil F || ds ( F und ds tangential) und
- weil mit r der Betrag F der Kraft auf dem Integrationsweg Γ
konstant ist ( F ( r ) = F 0 ⋅ r 0 ⁄ r = const. )
W =
°∫Γ F ⋅ ds = °∫Γ F ⋅ ds = F°∫Γ ds = F ⋅ Gesamtweg =
= F ⋅ 2πr = F 0⋅ ( r 0 ⁄ r ) ⋅ 2πr = F 0 ⋅ 2πr 0
Dieses Ergebnis W = Gewichtskraft ⋅ Hubweg ist sehr plausibel, weil sich bei der Bewegung eines Punktes der Seiltrommel auf
einer geschlossenen Kreisbahn diese um eine volle Umdrehung
dreht und das Gewicht F 0 um den Umfang 2πr 0 gehoben wird
b) Umlauf auf Weg aus radialen und tangentialen Abschnitten.
1
4
+
2
3
Auf den tangentialen Wegstücken (Kreisbögen) gilt - wie oben Spezialfall 1. Auf den radialen Wegstücken gilt Spezialfall 2, weil
F ⊥ ds . Weiterhin gilt:
Grundbegriffe und Werkzeuge
°∫Γ
∫Γ
=
1
+∫
Γ2
+∫
Γ3
+∫
Seite 15
Γ4
Dann ist aber
W = ∫ F ⋅ ds = πr 0 F 0 + 0 + πr 0 F 0 + 0 = 2πr 0 F 0
°
d. h. wir erhalten das gleiche Ergebnis wie bei der Bewegung auf
einer Kreisbahn.
c) Umlauf auf beliebigem geschlossenen Weg um die Achse
+
Jeder beliebige Weg kann aus radialen und tangentialen Wegelementen zusammengesetzt werden, wenn man deren Länge gegen
Null gehen läßt. Auch dann gilt weiterhin das Ergebnis
°∫ F ds
= 2πr 0 F 0
Dies ist leicht einzusehen, weil bei Umlauf eines Punktes um die
Achse bei beliebigen Wegen sich die Trommel um eine volle Umdrehung dreht.
Man nennt das ∫ F ds die Zirkulation eine Vektorfeldes.
°
d) Wenn der Integrationsweg die Achse nicht umfaßt
2
1
3+
4
W = ∫ F ds = πr 0 F 0 + 0 – πr 0 F 0 + 0 = 0
°
Merke: Ein Vektorfeld F ist zirkulationsfrei, wenn für alle Wege
∫ F ds = 0 ist. Im Beispiel ist dies ja nicht für alle Wege der Fall!
°Γ
Seite 16
GET-Skript
2
Der Stromkreis
2.1 Bewegte Ladungen
Bei nicht homogener Verteilung positiver und negativer Ladung:
Aufbau eines elektrischen Feldes E
- Kraft F = q ⋅ E auf jede Ladung q
- Antriebskraft (elektromotorische Kraft, EMK) für Ausgleichsvorgang ist vorhanden.
- Wenn Verbindungsweg vorhanden, kann der Ausgleich durch
Bewegung der Ladung stattfinden.
Beispiel: Zwei Metallplatten mit Elektronenüberschuß (-), bzw.
Elektronenmangel (+).
Elektronenüberschuß
−−
Elektronenmangel
−
−−
++
+
++
Bewegungsrichtung
der Elektronen
Stromrichtung
nach Definition
Leiter
Man kann den Ausgleichsvorgang als Funktion der Zeit beobachten.
- Kupferdraht, Silberdraht usw.: schneller Ausgleich
- Holzstab, Faden usw.: langsamer Ausgleich,
d.h. transportierte Ladungsmenge pro Zeit ist unterschiedlich.
Man definiert: Die elektrische Stromstärke I ist die pro Zeiteinheit
durch einen gegebenen Querschnitt hindurchfließende Ladungsmenge I = δq ⁄ δ t .
Für zeitlich veränderliche Ströme wählt man δt → 0 , also
I = dq / dt
Definition der Stromstärke
Die Einheit der Stromstärke heißt Ampere (Basiseinheit im
MKSA-System) ; [ I ] = A = Ampere
Der Stromkreis
Seite 17
2.2 Quellen
Beim Ausgleichsvorgang kommt die Antriebskraft ( E -Feld, EMK
bzw. Spannung U) aus der ungleichen Ladungsverteilung nimmt
also zeitlich ab.
Einen Gleichstrom erhält man, wenn die Elektromotorische Kraft
(EMK), auch Quellspannung bzw. Urspannung trotz des fließenden Stromes I konstant bleibt, wenn also zur Erhaltung des Überschusses (-) bzw. Mangels (+) Ladung nachgeliefert wird
.
Dies geschieht durch
-
chemische Vorgänge (Batterien, Akkumulatoren),
mechanische Ladungstrennung (Reibung usw.),
Induktionsvorgänge (Generatoren),
photoelektrischen Effekt (Solarzellen)
wobei mechanische, chemische Energie bzw. Strahlungsenergie in
elektrische Energie umgewandelt wird.
Es wird also zwischen zwei Polen eine konstante Spannung erzeugt, man spricht von einer Spannungsquelle
+ Pluspol
U
Zählpfeil
- Minuspol
Der Zählpfeil wird so definiert, daß er vom positiven Pol (Elektronenmangel) zum negativen Pol (Elektronenüberschuß) zeigt.
Die technische Stromrichtung (Zählpfeilrichtung) ist also der Bewegungsrichtung der Elektronen entgegengesetzt und stimmt mit
der Bewegungsrichtung positiver Ladungsträger überein (z.B. mit
der Bewegungsrichtung positiver Ionen)
Verbindet man beide Pole einer Quelle mit einem Leiter, so fließt
ein Strom konstanter Stärke an jeder Stelle dieses Stromkreises,
also ein Gleichstrom.
Seite 18
GET-Skript
2.3 Stromstärke und Stromdichte
Beschreibung der Stromstärke ist möglich
dq
- entweder über I = -----dt
- oder durch Ladungsdichte ρ und Geschwindigkeit v der Ladungsträger, die durch Leiterquerschnitt A laufen.
δq
Ladung
Ladungsdichte ρ = ------- = ----------------------δV
Volumen
δl
A
δQ
δV
Bei gleichförmiger Geschwindigkeit v der Ladungsträger und bei
gleichförmiger Verteilung über den senkrechten Querschnitt A, ist
I = δ q ⁄ δ t = ρ ⋅ δV ⁄ δt = ρ ⋅ A ⋅ δl ⁄ δt = ρ ⋅ A ⋅ v
oder I ⁄ A = ρ ⋅ v
Man bezeichnet I/A = Strom pro Fläche als Stromdichte S, also
S = ρ ⋅ v . Im allgemeinen ist aber die Geschwindigkeit der Ladungsträger nicht gleichförmig und senkrecht zum Querschnitt A
und die Stromdichte S ist ein Vektor, dessen Richtung durch die
Bewegungsrichtung der Ladungsträger festgelegt wird zu
S = ρ⋅v
Die Stromdichte ist also an unterschiedlichen Stellen des Leiters
unterschiedlich, hängt vom Ort (x,y,z) ab und ist demzufolge ein
Feld (Strömungsfeld), also genauer
S ( x, y, z ) = ρ ⋅ v ( x, y, z )
Berechnet man den Fluß dieses Vektorfeldes (siehe Werkzeuge,
1.4.1), so läßt sich leicht der Gesamtstrom I durch einen beliebigen
Leiterquerschnitt A berechnen.
Der Stromkreis
Seite 19
dA
v, S
Für ein Flächenelement d A ist der Teilfluß
S ⋅ d A = ρ ⋅ v ⋅ d A = ρ ⋅ v ⋅ dA ⋅ cos α
Zerlegt man v bzw. S in Komponenten parallel bzw. senkrecht zur
Oberfläche des Elements d A , so ist in der obigen Gleichung
v ⋅ cos α = v ⊥ die senkrechte Komponente von v und
S ⋅ d A = ρ ⋅ v ⊥ ⋅ dA
Für senkrecht zur Oberfläche mit v = v ⊥ laufende Ladungen galt
aber dI ⁄ dA = ρ ⋅ v ⊥ . Dann ist
S ⋅ d A = ρ ⋅ v ⊥ ⋅ dA = ( dI ⁄ dA ) ⋅ dA = dI
und für die gesamte Fläche A ist I =
I =
∫ A dI
=
∫A S d A
=
∫ A dI
und somit
∫A ρ ⋅ v d A
Also: Gleiche Stromstärke I aus vielen Ladungsträgern (großes ρ )
bei kleiner Geschwindigkeit v oder wenigen Ladungsträgern bei
großer Geschwindigkeit oder bei beliebiger Geschwindigkeitsverteilung.
Ebenso: Gleiche Stromstärke I aus positiven Ladungsträgern ρ
mit positiver Geschwindigkeit v wie aus negativen Ladungsträgern - ρ mit negativer Geschwindigkeit - v oder beliebiger Mischung.
Merke: Bis auf wenige Ausnahmen (z. B. Hall-Effekt) hängen die
äußeren Wirkungen des Stromes I nicht vom Vorzeichen der beteiligten Ladungsträger ab. Daher kann in E-Technik festgelegt werden: Flußrichtung des Stromes ist Bewegungsrichtung der positiven Ladungen.
Seite 20
GET-Skript
Beachte: Nach 1.4.1 war Ψ = ∫ v ⋅ d A das (Volumen/Zeit) das
A
sich durch A bewegte. Dann ist ρ ⋅ Ψ = ∫ ρ ⋅ v ⋅ d A = ∫ S ⋅ d A ,
A
A
also ( Ladungsdichte ⋅ Volumen ⁄ Zeit ) die Ladung, die sich pro
Zeit durch den Leiterquerschnitt bewegt, also der Strom I.
2.4 Potentielle Energie einer Ladung und Spannung
Ohne Magnetfeld ( B = 0 ) ist die Kraft im elektrischen Feld E
auf Ladung q gegeben durch F = q ⋅ E und die Energie, die eine
Ladung q bei Bewegung im E -Feld aufnimmt (die potentielle Engerie der Ladung), ist
– dW = F ⋅ ds = q ⋅ E ⋅ ds
δs
δs
q
m
E
Erdfeld
Beachte: Bei Bewegung in Feldrichtung ist dW = – ( q ⋅ E ⋅ ds )
negativ d. h. die Ladung verliert potentielle Energie. (Vergleiche:
Masse, die in Richtung des Erdfeldes fällt, verliert Energie!)
Die Änderungen dW der potentiellen Energie Wab auf dem Weg
von a → b einer Ladung kann man aufsummieren zu
–W ( a → b ) =
b
∫a q ⋅ E ⋅ ds .
Man kann plausibel machen (und später beweisen), daß die Energieänderung W ( a → b ) nur von der potentiellen Energie W(a) im
Punkt a und W(b) im Punkt b und nicht vom Weg des Ladungsträgers abhängt. W(a) und W(b) sind der Ladung proportional und
man schreibt deshalb
W ( a ) = q ⋅ ϕ ( a ) bzw. W ( b ) = q ⋅ ϕ ( b )
und nennt ϕ ( a ) bzw. ϕ ( b ) das Potential von Punkt a bzw. von
Punkt b. Dann ist aber
b
– W ( a → b ) = – q ⋅ [ ϕ ( b ) – ϕ ( a ) ] = q ⋅ ∫ q ⋅ E ⋅ ds
a
Der Stromkreis
Seite 21
Die Potentialdifferenz [ ϕ ( a ) – ϕ ( b ) ] spielt in der Elektrotechnik
eine wichtige Rolle. Sie bekommt einen eigenen Namen Uab und
heißt elektrische Spannung. Es ist also
U ab = ϕ ( a ) – ϕ ( b ) =
b
∫a E ⋅ ds
Spannung, Potentialdifferenz
Die Richtung a → b ist die Zählpfeilrichtung der (skalaren) Spannung.
Die Einheit der Spannung ist 1 Volt, also [ U ] = 1Volt = 1V
2.5 Metallische Leiter
2.5.1 Leitungsmechanismen
Pro Atom gibt es wenigstens ein freies Elektron, d.h. wenigstens
circa 1023/cm3. Sie bewegen sich ungeordnet wie Gasmoleküle,
ohne Vorzugsrichtung.
Bei einer Spannung Uab zwischen den Enden des Leiters ist ein E Feld vorhanden, d.h. Kraft F = – e ⋅ E beschleunigt alle Elektronen in Richtung - E .
Nach kurzer Laufstrecke erfolgen Stöße mit dem „Atomgitter“ und
Streuung der Elektronen in alle Richtungen (Flipper).
Also: Beschleunigung wird nach kurzer Zeit unterbrochen und
v e = b ⋅ t bleibt klein. Nur eine mittlere Driftgeschwindigkeit v ,
die proportional zu E ist, stellt sich ein:
v = –µe ⋅ E
Die Proportionalitätskonstante µ e heißt Beweglichkeit der Elektronen.
Sind N Leitungselektronen im Volumen V, so ist durch n = N/V und
die Elementarladung -e auch die Ladungsdichte ρ = – n ⋅ e bekannt.
Mit ρ und v läßt sich aber auch S berechnen
S = ρ ⋅ v = ( –n ⋅ e ) ⋅ ( –µe ⋅ E ) = κ ⋅ E
Seite 22
GET-Skript
Die Proportionalitätskonstante κ = µ e ⋅ e ⋅ n faßt die Materialeigenschaften zusammen und heißt spezifische Leitfähigkeit.
Der Kehrwert ρ R = 1/ κ heißt spezifischer Widerstand.
Bei konstanter Temperatur ist in Metallen κ (praktisch) konstant,
also unabhängig von S und E (Ohm‘sches Gesetz).
2.5.2 Anwendung des Ohm‘schen Gesetzes
In der Praxis verwendet man häufig metallischer Leiter der Länge
l mit Querschnitt A. Dann verläuft auch E in Leiterrichtung und
damit in Richtung des Wegelements ds . Es gilt Spezialfall 1 für
das Linienintegral und die Spannung Uab ist
l
A
a
U ab =
b
Uab
∫a E ⋅ ds
b
b
= E ⋅ ∫ ds = E ⋅ l ,
a
Mit E ist auch die Stromdichte S = κ ⋅ E überall gleich und parallel zur Flächennormalen, d.h. zur Berechnung des Stromes gilt
bei der Integration Spezialfall 1
I =
oder
∫A S ⋅ d A
= S ⋅ ∫ dA = S ⋅ A
A
I = κ⋅E⋅A
zusammen mit U ab = E ⋅ l ergibt sich eine Beziehung zwischen
Spannung Uab und Strom I
ρR ⋅ l
l
U ab = ----------- ⋅ I = ------------ ⋅ I
κ⋅A
A
Diese Beziehung zwischen den integralen Größen Uab und I wurde durch Integrieren der Beziehung zwischen E und S gewonnen.
Der Stromkreis
Seite 23
Man nennt die Proportionalitätskonstanten zwischen U und I den
elektrischen Widerstand R des Leiters, also
R = l ⁄ ( κ ⋅ A ) bzw. R = ρ R ⋅ l ⁄ A elektrischer Widerstand
Den Kehrwert nennt man den elektrischen Leitwert G, also
G = 1 ⁄ R elektrischer Leitwert
Damit kann man also schreiben
U = R⋅I
oder
I = G⋅U
Ohm‘sches Gesetz
Bei konstanter Temperatur ist R bzw. G in Metallen konstant
(Ohm‘sches Gesetz) und somit sind Spannung und Stromstärke
einander proportional. Dies ist gleichwertig mit der differentiellen
Form
E = ρR ⋅ S
S = κ⋅E
oder
Der ohm‘sche Widerstand R bzw. der Leitwert G sind wichtige
Größen in der Elektrotechnik und die Einheiten [ R ] bzw. [ G ] erhalten eigene Namen
[ R ] = 1Ohm = 1Ω = 1V ⁄ A ;
[ G ] = 1Siemens = 1S = 1 A ⁄ V ;
Die Einheiten der Konstanten ρ R und κ sind somit
[ ρ R ] = Ω ⋅ m und [ κ ] = S ⁄ m
2.5.3 Temperaturabhängigkeit des Widerstandes
Im allgemeinen ist R temperaturabhängig, also: R = R(T), z.B. bei
Kupfer:
ρR
Ωm
6 ⋅ 10
–8
4 ⋅ 10
–8
2 ⋅ 10
–8
T;ρR(T)
T0;ρR0
T
0
200
400
600
K
Da ρ in einem großen Bereich linear mit der Temperatur geht,
Seite 24
GET-Skript
kann man von ρ RO auf ρ R ( T ) schließen
ρ R ( T ) = ρ R0 ⋅ ( 1 + α ( T – T 0 ) ) .
Die Konstante ρ RO ist der spezifische Widerstand bei T = T 0 ; α
hängt i. a. etwas von der Wahl von T o ab.
°
Z.B. wird für T 0 = 20 = 293K der Wert von α mit α 20 gekenn–3
zeichnet und beträgt α 20 = 3, 93 ⋅ 10 ⁄ K .
Dieser Temperaturkoeffizient α ist bei vielen Stoffen positiv, bei
manchen auch negativ.
Für manche Anwendungen möchte man eine möglichst geringe
Temperaturabhängigkeit, also α ≈ 0 . Dies läßt sich bei einigen Legierungen erreichen, z. B. Konstantan (54% Cu, 45% Ni, 1% Mn)
–3
mit α = - 0.0035 ⋅ 10 ⁄ K .
Wenn der lineare Bereich für die geforderte Berechnung zu klein
ist oder die Linearität zu gering ist, verwendet man auch eine quadratische Näherung:
2
ρ R ( T ) = ρ R0 ⋅ ( 1 + α ⋅ ( T – T 0 ) + β ⋅ ( T – T 0 ) )
Bei einigen Metallen geht ρ R ( T ) bei T = 0 nicht exakt auf den
Wert Null.
Bei Supraleitern springt ρ R ( T ) bereits unterhalb einiger K auf exakt Null (z. B. in Quecksilber bei 4,2K).
Ωm
ρR
T
K
Gleichstromschaltungen
3
Seite 25
Gleichstromschaltungen
3.1 Strom und Spannung im einfachen Stromkreis
Einfacher Stromkreis: Eine Spannungsquelle, ein Verbraucher
VL1
UG
I
RV
U
VL2
Symbol:
27
1.2 M
≡ R = 27Ω
≡ R = 1,2MΩ
Nur bei unendlich hoher Leitfähigkeit der Verbindungsleitungen
VL1 und VL2 ist UV am Verbraucher gleich UG am Generator.
In der Praxis: Widerstand der Verbindungsleitung
ρR ⋅ l
R L = ----------A
l = Länge, A = Querschnitt ρ R = spezif. Widerstand.
Man denkt sich diesen Widerstand in den Bauelementen RL1 und
RL2 vereinigt und betrachtet die Symbole für Leitungen (-----) als
unendlich leitfähig. RL ersetzt also die Leitungen und heißt Ersatzwiderstand.
I
2
RL1
3
UL1
UG
U
RV
UL2
1
RL2
4
Stromkreis unter Berücksichtigung des Widerstands der Verbin-
Seite 26
GET-Skript
dungsleitungen
Damit ergibt sich innerhalb des Stromkreises folgender Potentialverlauf
UG
1
ϕ
ϕ2
ϕ3
ϕ4
UL1
2
U
3
UL2
4
1
I
UL1
UG
ϕ1
U
UL2
Im Generator: Anhebung des Potentials von ϕ 1 auf ϕ 2 .
Auf idealen Verbindungsleitungen: konstantes Potential.
Über den Widerständen: Abfall des Potentials von ϕ 2 → ϕ 3;
ϕ 3 → ϕ 4 und ϕ 4 → ϕ 1 .
Der Stromkreis schließt sich an Klemme 1 mit Potential ϕ 1 .
D.h. bei Umlauf von einem beliebigen Anfangspunkt durch den
Stromkreis zurück zu diesem Anfangspunkt ist die Potentialdifferenz = Null.
Also: Für Umlauf in Zählpfeilrichtung (ZPR) des Stromes:
0 = – U G + U L1 + U + U L2
Mit dem Ohm‘schen Gesetz lassen sich die Spannungen durch die
Widerstände ausdrücken, also: U L1 = I ⋅ R L1; U = I ⋅ R V ; und
U L2 = I ⋅ R L2 . Dann ist
U G = I ⋅ ( R L1 + R V + R L2 )
Damit läßt sich der Strom I berechnen zu
I = U G ⁄ ( R L1 + R V + R L2 )
und die Spannung U am Verbraucher ist
U = U G – U L1 – U L2 = U G – ( R L1 + R L2 ) ⋅ I
D.h.: Infolge der endlichen Leitfähigkeit der Verbindungsdrähte
sinkt die Verbraucherspannung mit dem Strom I ab.
Festlegung der ZPR: Im bisher verwendeten Zählpfeilsystem war
am Verbraucher Zählpfeil für U und I in der gleichen Richtung.
Gleichstromschaltungen
Dieses System heißt daher Verbraucherzählsystem.
Legt man dagegen fest, daß die Zählpfeile von U und I am Generator die gleiche Richtung haben sollen, so spricht man vom Generatorzählpfeilsystem.
3.2 Zweipole
Alle im Beispiel gezeigten Elemente des Stromkreises (Spannungsquelle, Widerstände) haben zwei Anschlüsse und werden
deshalb als Zweipole bezeichnet. Bei einem Zweipol interessiert
man sich
- nicht für Schaltungsdetails im Inneren, sondern
- nur für die Strom-Spannungscharakteristik
I = f(U), die man von außen bestimmen kann.
Definition: Zweipole heißen linear, wenn die Beziehung I = f(U)
(Strom-Spannungs-Charakteristik) linear ist, d.h. wenn gilt
U = a + b ⋅ I oder I = p + q ⋅ U .
Man unterscheidet noch einmal
Passive lineare Zweipole:
d.h. es ist keine Strom- oder Spannungsquelle im Zweipol enthalten (passiv) und es ist I = G ⋅ U bzw. U = R ⋅ I (linear). Beispiele: Ohm‘sche Widerstände und beliebige Kombinationen
daraus.
Aktive lineare Zweipole:
d.h. der Zweipol kann elektrische Energie abgeben (aktiv) und es
ist U = a + b ⋅ I bzw. I = p + q ⋅ U (linear). Beispiel: Realer
Generator, bei dem die Klemmenspannung vom Strom I abhängt.
Man kann einen realen Generator durch ein Ersatzschaltbild aus
einem idealen Generator und einem Widerstand darstellen. Eine
solche Spannungsquelle zeigt von außen die gleiche Strom-Spannungscharakteristik, ersetzt also die reale Spannungsquelle für unsere Betrachtungen und heißt deshalb Ersatzspannungsquelle.
Es gilt: U = UG - UR = UG - R ⋅ I = a + b ⋅ I , d.h. die Ersatzspannungsquelle ist ein linearer, aktiver Zweipol.
Seite 27
Seite 28
GET-Skript
.
R
UL
U
UG
3.3 Die Kirchhoffschen Regeln
Beim Zusammenschalten mehrerer Zweipole ergeben sich netzartige Strukturen, sogenannte Netzwerke, z. B.
Ein Netzwerk besteht aus:
- Zweigen von Zweipolen
- Knoten, an denen Zweige zusammenstoßen und
- Maschen, das sind beliebige geschlossene Wege im Netzwerk,
bei denen kein Zweig oder Knoten mehrfach durchlaufen wird.
Für die Knoten und Maschen lassen sich einfache Gesetzmäßigkeiten (Regeln) formulieren, die die Berechnung der Spannungen und
Ströme in beliebigen Netzwerken ermöglichen.
Gleichstromschaltungen
Seite 29
a) Die Kirchhoff‘sche Knotenregel
Gummiball
I2
I3
I1
Wasserströme
I4
I5
In einen Knoten darf sich keine Ladung stauen (wie z.B. Wasser in
einem Gummiball). Also muß gelten
→ Summe aller auf einen Knoten zufließenden Ströme = Summe aller vom Knoten wegfließenden Ströme.
Für eine mathematische Beschreibung dieser Regel muß man eine
für alle Ströme einheitliche Bezugsrichtung festlegen.
- Der Strom Ii im Zweig i zählt positiv, wenn die technische
Stromrichtung zum Knoten hin zeigt. Dies ist der Fall bei ZPR
zum Knoten und positivem Vorzeichen, oder bei ZPR weg vom
Knoten und negativem Vorzeichen
- Der Strom Ii im Zweig i, zählt negativ, wenn die technische
Stromrichtung vom Knoten weg zeigt. Dies ist der Fall bei ZPR
zum Knoten und negativem Vorzeichen, oder bei ZPR weg vom
Knoten und positivem Vorzeichen
Mit dieser Vereinbarung gilt
∑i = 1 I i = 0
n
Kirchhoff‘sche Knotenregel
b) Die Kirchhoff‘sche Maschenregel:
ϕc
U2
U3
ϕb
ϕd
U4
U1
ϕa
ϕe
U6
ϕf
U5
Seite 30
GET-Skript
In diesem Beispiel einer Masche haben die sechs Knoten die Potentiale ϕ a , ϕ b , ϕ c , ϕ d , ϕ e und ϕ f . Bezeichnet man die beteiligten Spannungen mit ϕ a – ϕ b , ϕ b – ϕ c , .... und ϕ f – ϕ a , so gilt:
( ϕa – ϕb ) + ( ϕb – ϕc ) + ( ϕc – ϕd ) + ( ϕd – ϕe ) + ( ϕe – ϕ f ) +
+ ( ϕ f – ϕa ) = 0
weil ja die Potentialdifferenz bei einem beliebigen Umlauf in einer
Masche zwischen Anfangs- und Endpunkt (beides gleich!) Null
ist.
Für eine allgemeine mathematische Beschreibung des obigen Beispiels muß man eine Umlaufrichtung festlegen, auf die sich die
ZPR der Spannungen Ui bezieht. (siehe Abb.)
- Eine Spannung zählt positiv, wenn sie positives Vorzeichen hat
und die ZPR mit der Umlaufrichtung übereinstimmt, oder wenn
sie negatives Vorzeichen hat und die ZPR der Umlaufrichtung
entgegengesetzt ist.
- Eine Spannung zählt negativ, wenn sie negatives Vorzeichen hat
und die ZPR mit der Umlaufrichtung übereinstimmt, oder wenn
sie positives Vorzeichen hat und die ZPR der Umlaufrichtung
entgegengesetzt ist.
Mit dieser Vereinbarung gilt
∑i = 1 U i = 0
n
Kirchhoff‘sche Maschenregel
Die Kirchhoff‘sche Maschenregel gilt nicht nur für geschlossene
Umläufe in Maschen eines Netzwerks, sondern für jeden geschlossenen Umlauf.
Beispiel: Ersatzspannungsquelle:
R
Umlaufrichtung
UR
UG
∑i = 1 U i =
n
U
( – U G + U R + U ) = 0 oder U = U G – U R
Gleichstromschaltungen
Seite 31
3.4 Serien- und Parallelschaltung von Widerständen
3.4.1 Serienschaltung
I
R1
U1
R2
U2
Rn
Un
U=U0
Maschenregel:
n
∑ Ui
n
= –U 0 +
i=0
∑ Ui =
n
0 oder U 0 =
i=1
∑ Ui
i=1
n
=
∑ I i ⋅ Ri
i=1
Knotenregel:
Alle Ströme Ii = I sind gleich, weil im einfachen Stromkreis zu jedem Knoten nur zwei Zweige führen, deren Sröme in Summe
gleich Null sind. Damit gilt
n
n
U0 =
∑ I i ⋅ Ri
i=1
=
∑ I ⋅ Ri
i=1
n
= I⋅
∑ Ri
i=1
Bezeichnet man
R =
∑i = 1 Ri als Gesamtwiderstand der Reihenschaltung,
n
und U = U0 als die Gesamtspannung, so gilt
U = I⋅R ,
Also: Bei einer Reihenschaltung addieren sich die Teilwiderstände
Ri zu einem Gesamtwiderstand R.
Seite 32
GET-Skript
3.4.2 Parallelschaltung
Knoten
I=I0
I=I0
I1
I2
In
U
In
I1
I2
I1
I2
U
In
I=I0
Knoten
Knotenregel:
Für jeden der Knoten also z. B. für den unterer Knoten gilt
∑i = o I i
= –I o + ∑
n
n
I
i=1 i
= 0
oder
I0 =
∑i = 1 I i
n
=
∑i = 1 U i ⋅ Gi
n
Maschenregel:
Alle Spannungen Ui = U sind gleich, weil beliebige Paare von Widerständen Maschen mit zwei Zweigen bilden, deren Spannungen
in Summe Null sind. Somit gilt
Io =
∑i = 1 U i ⋅ Gi
n
=
∑i = 1 U ⋅ G i
n
= U⋅∑
n
i=1
Gi
Bezeichnet man
G =
∑i = 1 Gi als den Gesamtleitwert der Parallelschaltung,
n
und I = I0 als den Gesamtstrom, so gilt
I = G⋅U,
Also: Bei einer Parallelschaltung addieren sich die Leitwerte Gi
bzw. die Kehrwerte 1/Ri der Widerstände zum Leitwert G bzw.
Kehrwert 1/R des Gesamtwiderstandes.
Gleichstromschaltungen
Seite 33
3.4.3 Einfache Widerstandsnetzwerke
Beispiel:
R6
R2
1
R
?
R7
R5
R4
R1
R3
2
Der Gesamtwiderstand R zwischen den Klemmen 1 und 2 kann bereits mit den bekannten Regeln für Reihen- und Parallelschaltung
schrittweise berechnet werden.
Schritte:
R 123 = R 1 + R 2 + R 3
(Reihenschaltung)
1
1
1
1
--------------- = ---------- + ------ + ------ (Parallelschaltung)
R 12345
R 123 R 4 R 5
R 123456 = R 12345 + R 6
1
1
1
--- = ----------------- + -----R
R 123456 R 7
(Reihenschaltung)
(Parallelschaltung)
3.5 Ersatzquelle
3.5.1 Ersatzspannungsquelle
Ersatzschaltbild des linearen aktiven Zweipols
Ri
I
URi
U0
U
Das Klemmenverhalten U = U 0 – R i ⋅ I (Strom-Spannungs-Charakteristik) einer realen Spannungsquelle wird durch obige Ersatz-
Seite 34
GET-Skript
spannungsquelle richtig beschrieben. Man nennt
U: Klemmenspannung
I:
Klemmenstrom
U0 : Quellenspannung und
Ri : Innenwiderstand
Betrachtet man die Ersatzspannungsquelle als Zweipol, so sind U0
und Ri von außen nicht zugänglich und müssen durch Messung
von U und I bestimmt werden.
Die lineare Strom-Spannungs-Kennlinie U = U 0 – R i ⋅ I kann
durch zwei beliebige Meßwertpaare (U,I) festgelegt werden, besonders vorteilhaft sind jedoch Messungen bei Leerlauf und Kurzschluß.
Leerlauf: Betriebszustand, in dem kein Strom fließt (I = 0).
UL: Leerlaufspannung = Klemmenspannung U bei I = 0.
Mit I = 0 wird der Spannungsabfall am Innenwiderstand Ri zu Null
und die Quellspannung wird als Klemmenspannung meßbar:
Uo = UL = U (I = 0)
Kurzschluß: Betriebszustand, in dem beide Klemmen auf gleichem
Potential liegen (U = 0).
IK : Kurzschlußstrom = Strom I bei Klemmenspannung U = 0.
Mit U = 0 liegt die gesamte Quellspannung am Innenwiderstand
und dieser wird als Quotient aus Quellspannung und Kurzschlußstrom meßbar:
I K = U 0 ⁄ R i = I ( U = 0 ) , und damit R i = U 0 ⁄ I K = U L ⁄ I K
Gleichstromschaltungen
Seite 35
3.5.2 Ersatzstromquelle
Ersatzschaltbild des linearen aktiven Zweipols.
I
IG
I0
1
G i = ----Ri
U
Das Klemmenverhalten I = I 0 – G i ⋅ U (Strom-Spannungs-Charakteristik) einer realen Stromquelle wird durch obige Ersatzstromquelle richtig beschrieben. Man nennt
U: Klemmenspannung
I:
Klemmenstrom
I0 : Quellstrom und
Gi: Leitwert des Innenwiderstands
Betrachtet man die Ersatzstromquelle als Zweipol, so sind I0 und
Gi = 1/Ri von außen nicht zugänglich und müssen durch Messung
von U und I bestimmt werden.
Die lineare Strom-Spannungs-Kennlinie I = I 0 – G i ⋅ U kann
durch zwei beliebige Meßwertpaare (U,I) festgelegt werden, besonders vorteilhaft sind jedoch Messungen bei Leerlauf und Kurzschluß.
Kurzschluß: Betriebszustand, in dem beide Klemmen auf gleichem
Potential liegen (U = 0).
IK : Kurzschlußstrom = Strom I bei Klemmenspannung U = 0.
Mit U = 0 ist I G = G i ⋅ U = 0 und der gesamte Quellstrom fließt
am Innenwiderstand vorbei, wird also als Kurzschlußstrom direktmeßbar:
I0 = IK = I (U = 0)
Leerlauf: Betriebszustand, in dem kein Strom fließt (I = 0).
UL: Leerlaufspannung = Klemmenspannung U bei I = 0.
Seite 36
GET-Skript
Mit I = 0 fließt der gesamte Quellstrom durch den Innenwiderstand Ri und dieser wird als Quotient aus Leerlaufspannung und
Kurzschlußstrom von außen messbar:
Ri = U L ⁄ I 0 = U L ⁄ I K
3.5.3 Allgemeine Ersatzquelle
Ersatzspannungsquelle und Ersatzstromquelle sind gleichwertig
und lassen sich eindeutig ineinander umrechnen.
I
Ersatzspannungsquelle
I
Ersatzstromquelle
U
U
Ri = U L ⁄ I K Ri = U L ⁄ I K
U = U L – Ri ⋅ I I = I K – Gi ⋅ U
weil U L = R i ⋅ I K
ist
U = Ri ( I K – I )
oder G i ⋅ U = I K – I
weil I K = U L /R i
ist
I = ( U L – U ) ⁄ Ri
oder R i ⋅ I = U L – U
I = I K – Gi ⋅ U
U = U L – Ri ⋅ I
Spezialfälle:
Ersatzspannungsquelle
Ersatzstromquelle
mit Ri = 0 ist
U unabhängig von I, also
Ideale Spannungsquelle
mit Gi = 0 ist
I unabhängig von U, also
Ideale Stromquelle
I
I
U
U
Gleichstromschaltungen
Seite 37
mit U0 = 0 (Kurzschluß)
mit I0 = 0 (Unterbrechung)
U = – Ri ⋅ I
I = –Gi ⋅ U
I
I
Ri
U
I0=0
U
Ri
U0=0
oder im Verbraucherzählpfeilsystem
U = Ri ⋅ I
I = Gi ⋅ U
I
Ri
I
U
Ri
U
Das entspricht dem passiven linearen Zweipol
(Ohm‘scher Widerstand)
3.5.4 Spannungsteiler
Zur Erzeugung einer Teilspannung U aus der Quellspannung U 0
verwendet man die Spannungsteilerschaltung.
IG
R1 I
UG
U
R2
Verbraucher
U
R
Seite 38
GET-Skript
Spannungsteiler im Leerlauf
Bei I = 0 , näherungsweise bei I ≈ 0 also bei R » R 1, R 2 gilt
U G = I G ⋅ ( R 1 + R 2 ) und im Leerlauf ist U L = I G ⋅ R 2 , also
U L ⁄ U G = R 2 ⁄ ( R 1 + R 2 ) oder
Teilspannung/Gesamtspannung =
= Teilwiderstand/Gesamtwiderstand
Belastete Spannungsteiler
U G = I G ⋅ R 1 + U mit I G = I + U ⁄ R 2
R
U G = ( I + U ⁄ R 2 ) ⋅ R 1 + U = I ⋅ R 1 + U ⋅ 1 + -----1- oder
R 2
–I ⋅
U =
U0
R1 ⋅ R2
-----------------R1 + R2
R2
U G ⋅ -----------------R1 + R2
U =
–I⋅
Ri
Diese lineare Beziehung zwischen U und I entspricht einem aktiven linearen Zweipol mit
Quellspannung U 0 = U G ⋅ R 2 ⁄ ( R 1 + R 2 ) und
Innenwiderstand R i = R 1 ⋅ R 2 ⁄ ( R 1 + R 2 ) oder R i = R 1 || R 2
Bestimmt man für den Spannungsteiler Leerlaufspannung und
Kurzschlußstrom und wendet die bekannten Regeln zur Bestimmung des Innenwiderstandes und der Quellspannung einer Ersatzquelle an, so erhält man das gleiche Ergebnis für U0 und Ri
Leerlauf: U L ⁄ U G = R 2 ⁄ R 1 + R 2 oder U L = U G ⋅ R 2 ⁄ ( R 1 + R 2 )
Kurzschluß: I K = U G ⁄ R 1
also U 0 = U L = U G ⋅ R 2 ⁄ ( R 1 + R 2 )
und R i = U L ⁄ I K = R 1 ⋅ R 2 ⁄ ( R 1 + R 2 )
Gleichstromschaltungen
Seite 39
Damit kann der Spannungsteiler durch folgendes Ersatzschaltbild
dargestellt werden:
R1
I
UG ⋅ R2
U 0 = -----------------R1 + R2
R2
U
3.6 Energieumsetzung im Stromkreis
3.6.1 Energie und Leistung
U
I
ds
S
dA
E
I
dV = ds ⋅ dA
l
Die Ladungen dq im Volumen dV erfahren im Feld E die Kraft
F = dq ⋅ E und verrichtet beim Durchlaufen des Weges ds dieArbeit dW = F ⋅ ds = dq ⋅ E ⋅ ds .
Weil dq = ρ ⋅ dV = S ⋅ d A ⋅ dt ist, gilt
dW = S ⋅ d A ⋅ E ⋅ ds ⋅ dt = S ⋅ E ⋅ dV ⋅ dt ,
Die Arbeit dW = S ⋅ E ⋅ dV ⋅ dt im Volumenelement dV muß
nun über den gesamten Verbraucher aufsummiert werden.
(a) Erst über Scheibe der Dicke ds , wobei überall E ⋅ ds = dU
konstant ist, also
dW Scheibe =
∫A E ⋅ ds ⋅ S ⋅ d A ⋅ dt
Seite 40
GET-Skript
und weil bei Integration über die Fläche sowohl E ⋅ ds = dU , als
auch dt konstant sind, ist
dW Scheibe = dU ⋅ dt ⋅ ∫ S ⋅ d A = dU ⋅ dt ⋅ I
A
ds
E
S
dA
Gesamtfläche A
dU = E ⋅ ds
(b) Aufsummieren über den gesamten Verbraucher der Länge l
Weil
l
∫0 dU = U
ist W =
l
ist,
∫0 dW Scheibe
l
= I ⋅ dt ⋅ ∫ dU = U ⋅ I ⋅ dt
0
Bezeichnet man die pro Zeiteinheit verrichtete Arbeit dW/dt mit
Leistung P, so ist
dW
P = -------- = U ⋅ I
dt
Elektrische Leistung
Als abgeleitete Einheit für die Größe Leistung ergibt sich
[P] = [U ] ⋅ [I ] = V ⋅ A
Wegen der Wichtigkeit hat [ P ] einen eigenen Namen, nämlich
1 Watt.
1 Watt = 1 W = 1 VA = 1 Joule/s = 1 kg m2/s3
In der Elektrotechnik hat die Arbeit W die Einheit 1 Wattsekunde
[ W ] = 1 Wattsekunde = 1Ws ;
6
3.6 ⋅ 10 Ws = 1KWh
Gleichstromschaltungen
Seite 41
3.6.2 Leistungsanpassung und Wirkungsgrad
Bei der Kombination eines aktiven Zweipols (Ersatzquelle) und eines passiven Zweipols (Verbraucher) wird am Verbraucher R und
am Innenwiderstand Ri der Quelle Leistung verbraucht.
Ri
I
U0
U
Quelle
R
Verbraucher
Wann ist die Leistung P am Verbraucher, maximal?
Hinweis:
R = 0: U = 0
I = IK also P = U ⋅ I = 0
R → ∞ : U = UL I = 0 also P = U ⋅ I = 0
Dazwischen Maximum.
Allgemein:
P = U ⋅ I und weil I = U 0 ⁄ ( R i + R ) und
U = R ⋅ I = U 0 ⋅ R ⁄ ( R i + R ) , ist
2
P = U ⋅ I = U 0 ⋅ R ⁄ ( Ri + R )
2
also: P = 0 für R = 0 und R → ∞
Das Maximum liegt bei ∂P ⁄ ∂R = 0 . An dieser Stelle ist R = Ri
(Beweis durch Differenzieren!)
1
2
2
2
Dort ist P max = U 0 ⋅ R i ⁄ ( 2R i ) = --- ⋅ U 0 ⁄ R i .
4
Trägt man P/Pmax über R/Ri auf, so ergibt sich
P/Pmax
1
0
0
1
2
3
1
2
Bei R = R i ist P = P max = --- ⋅ U 0 ⁄ R i
4
Man spricht hier von Leistungsanpassung.
R/Ri
Seite 42
GET-Skript
Die Gesamtleistung von Quelle und Verbraucher ist
2
P ges = U 0 ⋅ I = U 0 ⁄ ( R i + R )
Ermittelt man das Verhältnis zwischen Verbraucherleistung und
Gesamtleistung P ⁄ P ges , so erhält man den Wirkungsgrad η mit
η = P ⁄ P ges = R ⁄ ( R + R i ) = ( R ⁄ R i ) ⁄ ( 1 + R ⁄ R i )
Trägt man η über R/Ri auf, so erhält man den Verlauf des Wirkungsgrades.
η
1
,5
0
1
2
3
R/Ri
Bei R = Ri: η = 0, 5 (Leistungsanpassung)
Bei R → ∞ : η = 1
(maximaler Wirkungsgrad)
3.7 Schaltung mit nichtlinearen Zweipolen
Es gelten weiterhin
- Knotenregel für Ströme
- Maschenregel für Spannungen
aber: es sind Bauelemente (Zweipole) enthalten, für die keine lineare Beziehung U = a + b ⋅ I vorhanden, für die jedoch eine
eindeutige Beziehung U = f(I) gilt. Diese Beziehung zwischen U
und I ist entweder
kT
I
- explizit bekannt, z. B. Diode: U D = ------ ln 1 + ---- ,
e
I 0
- als Kennlinie aufgenommen (Graphik)
- für die in der Schaltung enthaltenen linearen Zweipole weiterhin durch U = I ⋅ R gegeben.
Die Schaltungen lassen sich daher eindeutig, oft aber nicht mehr
geschlossen, sondern nur graphisch oder numerisch berechnen.
Beispiel: Schaltung mit einer Diode.
Gleichstromschaltungen
Seite 43
Ri
I
URi
R
UR
U
U0
UD
Maschenregel: – U 0 + U Ri + U R + U D = 0
Durch alle Bauelemente fließt I und es gilt
k⋅T
I
U D = ----------- ⋅ ln 1 + ---- nichtlinearer Zweipol
e
I 0
U Ri = R i ⋅ I
Ohm‘sches Gesetz
UR = R ⋅ I
k⋅T
I
also: [ – U 0 + ( R i + R ) ⋅ I ] + ----------- ⋅ ln 1 + ----
e
I 0
= 0
Hierfür läßt sich keine geschlossene Lösung finden.
Graphische Lösung:
Wir stellen die obige Beziehung um und suchen den Strom I, bei
dem der rechte und der linke Term gleich werden.
[ U 0 – ( Ri + R ) ⋅ I ]
=
kT
I
------ ln 1 + ----
e
I 0
Diodenkennlinie
Widerstandsgerad
Der linke Term stellt einen passiven nichtlinearen Zweipol (Diode)
dar, der rechte einen aktiven linearen Zweipol (Quelle mit Innenwiderstand R = Ri). Beide Zweipole sind miteinander verbunden,
sodaß Spannung und Strom bei beiden übereinstimmen muß.
Zeichnet man für beide die Strom-Spannungs-Kennlinie, so ist diese Bedingung am Schnittpunkt erfüllt. Dieser Schnittpunkt heißt
Arbeitspunkt (UDA, IA) und in diesem Punkt sind alle Bedingungen
Seite 44
GET-Skript
der Schaltung erfüllt.
I
Widerstandsgerade
Diodenkennlinie
IA
0
Arbeitspunkt
UDA
UR + URi
U0
U
Lineare Netzwerke
4
Seite 45
Lineare Netzwerke
4.1 Definition linearer Netze
Aufgabe: Berechnung der Spannungen und Ströme in einem beliebigen Netzwerk, das mit Gleichspannungen und/oder Gleichströmen gespeist wird.
Bei linearen Netzen läßt sich zur Lösung dieser Aufgabe ein lineares Gleichungssystem aufstellen und zwar mithilfe der Kirchhoff‘schen Regeln:
∑υ I υ = 0 (Knotenregel)
∑υ U υ = 0 (Maschenregel)
ohnehin linear
Weitere Gleichungen beschreiben Abhängigkeit zwischen U υ und
I υ . Falls die Zweige des Netzes aus linearen Zweipolen bestehen,
gilt für jeden Zweig υ :
U υ = U 0υ + R υ ⋅ I υ bzw. I υ = I 0υ + G υ ⋅ U υ ebenfalls linear
Bisher hießen die Zweipolgleichungen
U υ = U 0υ – R υ ⋅ I υ bzw. I υ = I 0υ – G υ ⋅ U υ .
Weil man bei der Beschreibung linearer Netzwerke nur einen
Zählpfeil je Zweig verwendet, weil also die ZPR für Strom und
Spannung auch bei aktiven Zweipolen gleiche Richtung haben, ändert sich das Vorzeichen bei R υ bzw. G υ .
Eine beliebige Zusammenschaltung aktiver und passiver linearer
Seite 46
GET-Skript
Zweipole heißt also lineares Netzwerk und läßt sich durch ein System linearer Gleichungen beschreiben.
4.2 Darstellung linearer Netze durch Graphen
Für die Aufstellung des Gleichungssystems muß (insbesondere bei
größeren Netzen) auf formale Methoden zurückgegriffen werden,
die sich an der Struktur der Netzwerke orientieren.
Da in einem linearen Netz alle Zweige durch formal gleiche Beziehungen beschrieben werden (z. B. U υ = U 0υ + R υ ⋅ I υ ), können
die linearen Zweipole durch Striche symbolisch dargestellt werden.
Dieser Streckenkomplex gibt eindeutig die Struktur des Netzes
wieder und heißt Graph.
Beispiel:
Netzwerk
Graph
Wie erwähnt ist es vorteilhaft anstelle der Zählpfeile für Strom und
Spannung einen gemeinsamen Pfeil an jeder Strecke des Graphen
anzubringen, wobei der Vorzeichenwechsel in den Zweipolgleichungen zu beachten ist. Die Zweige des Graphen werden also orientiert
Lineare Netzwerke
Seite 47
.
A
1
4
5
E
B
6
2
C
8
7
3
Graph mit
orientierten
Zweigen
D
Zur weiteren Vereinfachung der Bezeichnung werden Zweige numeriert und Knoten durch Buchstaben gekennzeichnet.
Seite 48
GET-Skript
4.3 Können beliebige lineare Netze berechnet werden?
4.3.1 Wieviele Gleichungen sind notwendig?
Unbekannt sind die Ströme I υ und die Spannungen U υ aller
Zweige υ . Ein Netz mit z Zweigen hat deshalb 2z Unbekannte
und es sind 2z Gleichungen nötig.
(a) Zweipolgleichungen:
Für jeden Zweig υ gibt es eine Zweipolgleichung
U υ = U 0υ + R υ ⋅ I υ bzw. I υ = I 0υ + G υ ⋅ U υ für υ = 1 ... z
Jede Unbekannte U υ , I υ kommt nur in einer (der υ -ten) Gleichung vor, d.h. die Zweipolgleichungen sind linear unabhängig
→ Es gibt z linear unabhängige Zweipolgleichungen
(b) Knoten- und Maschengleichungen:
∑υ U υ
= 0 und
∑υ I υ
= 0
müssen weitere z Gleichungen liefern.
Bei k Knoten und z Zweigen findet man i. a. sogar mehr als z Gleichungen. Es ist also bei komplexeren Netzen nicht ganz einfach
festzustellen, ob bei einer Auswahl von z Gleichungen diese linear
unabhängig sind. Die Frage lautet:
4.3.2 Gibt es genügend unabhängige Gleichungen?
Unabhängige Knotengleichungen:
Netzwerk mit k Knoten und z Zweigen, z.B.: k = 7; z = 12
Lineare Netzwerke
A
1
Seite 49
C
8
2
11
3
9
B
10
4
G
12
D
6
7
G‘
5
E
Knoten mit Buchstaben bezeichnen und
verbinden,
Zweige dieses Strekkenzuges numerieren.
F
Dann sieht man:
Knoten A enthältStrom I1
Knoten B enthältneuStrom I2
Knoten C enthältneuStrom I3
Knoten D enthältneuStrom I4
Knoten E enthältneuStrom I5
Knoten F enthältneuStrom I6
allgemein
Knoten (k-1) enthältneuStrom Ik-1
In jeder der (k-1) Gleichungen kommt zumindest (!) ein Strom I υ
neu hinzu, der in keiner vorherigen enthalten ist.
→ Es gibt (k-1) linear unabhängige Knotengleichungen
Für Knoten G (allgemein k) gibt es ebenfalls eine Knotengleichung. Diese ist aber identisch mit der Gleichung für Knoten G‘
(Entspricht Summe aller Knoten A bis F bzw. 1 ... (k-1)), also
nicht linear unabhängig. Es fehlen also noch z-(k-1) linear unabhängige Maschengleichungen
Seite 50
GET-Skript
Unabhängige Maschengleichungen:
alle Knoten sind schon über Streckenzug 1, ... 6 verbunden. Alle
weiteren Zweige 7, ... 12 mit den Spannungen U7 ... U12 bilden zusätzliche Verbindungen zwischen Knoten bilden also zusammen
mit den vorhandenen Verbindungen 1 ... 6 Maschen.
Verbindungen zusammen mitbilden
mit Spannungneuer SpannungMasche
U4, U5 U7
1
U1, U2 U8
2
U2, U3 U9
3
U2, U3, U4, U10
4
U3, U4, U5, U6U11
5
U4, U5, U6U12
6
Weil in jeder Gleichung genau eine der Spannungen U7 ... U12 vorkommt, die in keiner der anderen Maschen auftritt, sind alle Gleichungen linear unabhängig.
Jede der zusätzlichen Verbindungen 7 ... 12 verbindet aber zwei
Knoten, die bereits über 1 ... 6 auf genau einem, jedoch jeweils anderen Weg verbunden sind, bildet also eine Masche.
Allgemein:
Bei k Knoten und z Zweigen wurden die Knoten über (k-1) Zweige
miteinander verbunden. Die [ z – ( k – 1 ) ] zusätzlichen Zweige
- können alle je eine Masche bilden
- kommen jeweils nur in einer Masche vor
→ Es gibt (z - k +1) linear unabhängige
Maschengleichungen.
Lineare Netzwerke
z - Zweipolgleichungen
Bilanz: k-1 Knotengleichungen
[ z – ( k – 1 ) ]Maschengleichungen
Seite 51
2 z Unbekannte
Die Kirschhoff‘schen Regeln (Maschen- und Knotenregel) und
die Zweipolgleichungen liefern eine notwendige und hinreichende Zahl linear unabhängiger Gleichungen.
4.3.3 Gibt es einer optimale Strategie?
Beim Aufstellen der (k - 1) Knotengleichungen und (z - k + 1) Maschengleichungen kommen i. a. alle z Ströme und alle z Spannungen vor, die über z Zweipolgleichungen verknüpft sind, also i. a.
ein großes Gleichungssystem mit 2z Unbekannten.
Strategie:
- Einteilung in abhängige und unabhängige Variable (Ströme,
Spannungen).
- Berechnung der unabhängigen Variablen durch kleineres Gleichungssystem mit weniger Unbekannten.
- Berechnung der abhängigen Variablen direkt aus den unabhängigen in einem zweiten Schritt.
- Oft ist nur ein Teil der Variablen gesucht und sollten dann als
unabhängige Variable berechnet werden.
- Verwendung topologischer Überlegungen bei der Festlegung
der unabhängigen Ströme bzw. Spannungen.
4.4 Netzwerkstopologie
4.4.1 Der vollständige Baum
Bei der Aufzählung der Gleichungen half in 4.3.2 Streckenzug
zwischen Knoten A, B, C ... G, allgemein bis Knoten k. Dadurch
sind:
- Alle Knoten miteinander verbunden.
- Keine Maschen enthalten.
Jede Verbindung, die diese Bedingungen erfüllt, heißt
vollständiger Baum.
Seite 52
GET-Skript
A
B
E
D
C
Netzwerk
Beispiele für vollständigen Baum
(a) Baumzweige
Zur Verbindung des ersten mit dem zweiten Knoten mindestens
ein Baumzweig. Zum Verbinden jedes weiteren Knoten mindestens ein weiterer Baumzweig → mindestens (k - 1) Baumzweige
Aber jeder weitere Zweig zwischen zwei Knoten bildet Masche,
also kein vollständiger Baum mehr. → höchstens (k - 1) Baumzweige
Bei k Knoten gibt es k - 1 Baumzweige. Jeder herausgenommene
Zweig läßt Knoten in zwei Gruppen zerfallen, jeder zusätzliche
bildet Maschen
(b) Verbindungszweige
In einem Netzwerk mit k Knoten und z Zweigen heißen die
[ z – ( k – 1 ) ] weiteren Zweige, die bereits über Baumzweige
verbundene Knoten nocheinmal verbinden und Maschen bilden,
Verbindungszweige oder Maschenzweige.
Bei k Knoten und z Zweigen gibt es z - k + 1 Verbindungszweige
oder Maschenzweige. Diese Verbindungszweige gehören nicht
zum vollständigen Baum.
4.4.2 Die Baumzweigspannungen als unabhängige Variablen
Im vollständigen Baum ist jeder Knoten mit jedem anderen über
Zweipole verbunden.
Die (k - 1) Zweipolspannungen der Baumzweige legen eindeutig
die relativen Potentiale aller Knoten fest. Jedes kann unabhängig
von allen anderen festgelegt sein.
Lineare Netzwerke
Seite 53
Legt man eine Baumzweigspannung nicht fest, so wird mindestens
ein Knotenpotential unbestimmt, → mindestens (k - 1) Spannungen müssen festgelegt werden.
Alle weiteren Spannungen, also die Spannungen der Verbindungszweige sind durch die relativen Potentiale der Knoten bereits festgelegt. → höchstens (k - 1) Zweipolspannungen unabhängig
wählbar.
In einem Netzwerk mit k Knoten sind zur Festlegung aller Spannungen (k - 1) unabhängige Spannungen notwendig. Die (k - 1)
Spannungen des vollständigen Baumes bilden ein vollständiges
System von unabhängigen Spannungsvariablen.
Beispiel:
1
4
5
6
2
5
8
7
6
3
Netzwerk
8
7
Baum
Die Spannunngen U 5, U 6, U 7 und U 8 sind als Baumzweigspannungen unabhängig wählbar. Die abhängigen Spannungen U1,
U2, U3, U4 lassen sich eindeutig durch die Maschenregel bestimmen.
U1 = U5 -U6
U2 =
U6 -U7
U3 =
U7 -U8
U4 = -U5
+U8
4.4.3 Die Verbindungszweigströme als unabhängige Variablen
Die beiden Enden eines Verbindungzweiges können auf einem
Weg, der ausschließlich über Baumzweige führt, verbunden werden. Jeder dieser (z - k + 1) Verbindungszweigströme kann unabhängig von den anderen fließen.
Legt man einen Verbindungszweigstrom nicht fest, so bleibt er unbestimmt. → mindestens (z - k + 1) unabhängige Ströme.
Seite 54
GET-Skript
Da der vollständige Baum keine Maschen enthält, gibt es nur einen
Weg zwischen den Endpunkten eines Verbindungszweiges, d. h.
der unabhängige Verbindungszweigstrom fließt eindeutig durch
eine Masche. Durch die (z - k + 1) Maschen mit je einem Verbindungszweigstrom sind also alle Baumzweigströme festgelegt. →
höchstens (z - k + 1) Zweigströme unabhängig wählbar
In einem Netzwerk mit z Zweigen und k Knoten sind zur Festlegung aller Ströme (z - k + 1) unabhängige Ströme notwendig. Die
(z - k + 1) Verbindungszweigströme bilden ein vollständiges System von unabhängigen Stromvariablen.
Beispiel:
1
4
1
4
5
6
8
7
2
3
Netzwerk
2
3
Verbindungszweige
(Komplementärbaum)
Die Ströme I 1, I 2, I 3, I 4 sind als Verbindungszweigströme unabhängig wählbar.
Die abhängigen Ströme I5, I6, I7, I8 lassen sich eindeutig durch die
Knotenregel bestimmen:
I5 = -I1
I6 = I 1
I7 =
I8 =
+I4
-I2
I2
-I3
I3
-I4
4.5 Maschenanalyse
4.5.1 Schritte des Rechenverfahrens
Gesucht: Ströme I υ einiger/aller Zweige.
Vorgehensweise:
- Vollständigen Baum aufstellen. Falls nur wenige Ströme I υ ge-
Lineare Netzwerke
-
-
-
Seite 55
sucht, Baum nach Möglichkeit so wählen, daß die gesuchten
Ströme durch die Verbindungszweige fließen, also unabhängige
Variable werden.
Alle Maschen suchen, in denen nur ein unabhängiger Strom
fließt und für diese (z - k + 1) Maschen die Maschengleichungen
aufstellen.
Spannungen der Maschengleichungen mittels Zweipolgleichungen durch Ströme ausdrücken: U υ = U 0υ + R υ ⋅ I υ
In diesen (z - k + 1) Maschengleichungen sind jetzt i. a. noch
alle z Ströme I υ als Unbekannte enthalten. Mit Knotenregel
können (k - 1) abhängige Ströme sofort durch (z - k + 1) unabhängige Ströme ersetzt werden.
Diese (z - k + 1) Gleichungen mit (z - k + 1) Ungekannten kann
man sofort auflösen und kennt alle unabhängigen Ströme.
Sind alle Ströme gesucht, mit Knotenregel abhängige Ströme
berechnen.
Es zeigt sich, daß man das Gleichungssystem mit (z - k + 1)
Gleichungen aus dem vollständigen Baum ablesen und direkt
aufstellen kann.
4.5.2 Herleitung des Gleichungssystems
Gegeben: Orientierter Graph des Netzwerks mit k = 5 und z = 8
Gesucht: Die Ströme I υ
1
4
5
6
2
8
7
3
Aufstellen des vollständigen Baumes
Falls alle Ströme gesucht, beliebiger Baum.
Falls z. B. I1, I2, I3, I4 gesucht, Baum so wählen, daß Zweige 1, 2,
3, 4 Verbindungszweige werden. Die Abbildung zeigt ein Beispiel
für einen vollständiger Baum, bei dem I1, I2, I3 und I4 in Verbindungszweigen fließen und somit unabhängige Ströme sind.
Seite 56
GET-Skript
.
5
6
8
7
Aufstellen der Maschengleichungen
Es gibt (z - k + 1) (also 4) Maschen mit je einem unabhängigen
Strom (I1, I 2, I 3, I 4).
I1
I4
5
6
I2
8
7
I3
Also (z - k + 1) linear unabhängige Maschengleichungen:
U1
-U 5 +U 6
U2
=0
-U 6 +U 7
U3
=0
-U 7 +U 8 = 0
U 4 +U 5
-U 8 = 0
Spannungen durch Ströme ausdrücken
Diese Spannungen können mit Hilfe der z Zweipolgleichungen
durch Ströme ersetzt werden:
U υ = U 0υ + R υ I υ
und man erhält
Lineare Netzwerke
( U 01 + R 1 I 1 ) – ( U 05 + R 5 I 5 ) + ( U 06 + R 6 I 6 ) = 0
( U 02 + R 2 I 2 ) – ( U 06 + R 6 I 6 ) + ( U 07 + R 7 I 7 ) = 0
( U 03 + R 3 I 3 ) – ( U 07 + R 7 I 7 ) + ( U 08 + R 8 I 8 ) = 0
( U 04 + R 4 I 4 ) – ( U 08 + R 8 I 8 ) + ( U 05 + R 5 I 5 ) = 0
Abhängige Ströme durch unabhängige ersetzen
Mit Knotengleichungen werden (k - 1) abhängige Ströme durch
unabhängige ausgedrück
I5 = I4 – I1
I6 = I1 – I2
I7 = I2 – I3
I8 = I3 – I4
und I5 ... I8 aus Maschengleichungen eliminiert.
( U 01 + R 1 I 1 ) – U 05 + R 5 ( I 4 – I 1 ) + U 06 + R 6 ( I 1 – I 2 ) = 0
( U 02 + R 2 I 2 ) – U 06 + R 6 ( I 1 – I 2 ) + U 07 + R 7 ( I 2 – I 3 ) = 0
( U 03 + R 3 I 3 ) – U 07 + R 7 ( I 2 – I 3 ) + U 08 + R 8 ( I 3 – I 4 ) = 0
( U 04 + R 4 I 4 ) – U 08 + R 8 ( I 3 – I 4 ) + U 05 + R 5 ( I 4 – I 1 ) = 0
Diese (z - k + 1) (also 4) Gleichungen enthalten nur (z - k + 1) Unbekannte, nämlich die unabhängigen Ströme. Im günstigsten Fall
sind das bereits die gesuchten Ströme.
Sind alle z Ströme gesucht, dann abhängige durch (bereits bekannte) unabhängige Ströme ausdrücken (Knotengleichungen).
Seite 57
Seite 58
GET-Skript
4.5.3 Unmittelbare Aufstellung des Gleichungssystems
Bringt man das Gleichungssystem mit (z - k + 1) Unbekannten in
Matrix-Schreibweise, so kann man die Elemente der Matrix und
der Vektoren direkt aus dem vollständigen Baum ablesen und so
das Gleichungssystem unmittelbar aufstellen.
1
4
5
4
1
6
8
2
3
7
2
3
Grundvoraussetzung hierfür: Umlaufrichtung einer Masche mit
zugehörigem Verbindungszweig - Stromzählpfeil gleichsinnig
Bringt man im Gleichungssystem unseres Beispiels alle Quellspannungen nach rechts und ordnet man die Spalten nach Strömen
I υ , so erhält man
( R 1 + R 5 + R 6 )I 1
– R6 I 2
– R6 I 1 + ( R2 + R6 + R7 ) I 2
– R 5 I 4 = – U 01 + U 05 – U 06
– R7 I 3
= – U 02 + U 06 – U 07
– R7 I 2 + ( R3 + R7 + R8 ) I 3
– R 8 I 4 = – U 03 + U 07 – U 08
+ ( R 4 + R 8 + R 5 ) I 4 = – U 04 + U 08 – U 05
– R8 I 3
– R5 I 1
Dieses Gleichungssystem läßt sich auch in der Form
W M ⋅ IV = U0
schreiben, wenn man die Widerstandsmatrix W M ,
den Vektor der Verbindungszweigströme I V
und den Quellspannungsvektor U 0 wie folgt definiert:
WM =
( R1 + R5 + R6 )
– R6
0
– R5
– R6
( R2 + R6 + R7 )
– R7
0
0
– R7
( R3 + R7 + R8 )
– R8
– R5
0
– R8
( R4 + R8 + R5 )
Lineare Netzwerke
Seite 59
I1
IV =
I2
I3
– U 01 + U 05 – U 06
und
– U 02 + U 06 – U 07
U0 =
– U 03 + U 07 – U 08
I4
– U 04 + U 08 – U 05
Die Maschenwiderstandsmatrix W M zeigt folgende (hier nicht
bewiesene) Gesetzmäßigkeit:
Die Elemente der Hauptdiagonalen sind gleich der Summe der
Widerstände der betreffenden Masche.
1
1
4
5
4
1
6
8
2
2
= Nummer und
Umlaufrichtung
der Masche
3
7
3
D. h. das Diagonalelement W11 der Matrix W M ist gleich der
Summe der Widerstände von Masche 1
W 11 = R 1 + R 5 + R 6
W 22 = R 2 + R 6 + R 7
W 33 = R 3 + R 7 + R 8
W 44 = R 4 + R 5 + R 8
Die übrigen Elemente der Matrix W M werden von den Widerständen gebildet, die den verschiedenen Maschen gemeinsam sind.
D. h. R6 ist Masche 1 und Masche 2 gemeinsam und bestimmt Element W12 bzw. W21 .
Wird der gemeinsame Widerstand von Umlaufrichtung Masche m
und von Umlaufrichtung Masche n gleichsinnig durchlaufen, dann
wird W mn = W nm > 0 , wird er in entgegengesetzter Richtung
durchlaufen, so wird W mn = W nm < 0 .
Seite 60
GET-Skript
In unserem Beispiel ist die Umlaufrichtung von Masche 1 in Richtung der Orientierung von Zweig 6, die von Masche 2 entgegen der
Orientierung von Zweig 6, also wird W 12 = W 21 < 0 .
W 12 = W 21 = – R 6
W 23 = W 32 = – R 7
W 34 = W 43 = – R 8
W 41 = W 14 = – R 5
Alle anderen Elemente W mn = 0 .
Damit kann W M direkt aus dem vollständigen Baum abgelesen
werden.
Der Vektor U 0 enthält ausschließlich Quellspannungen (Stromquellen umrechnen) und zeigt folgende (hier nicht bewiesene) Gesetzmäßigkeiten:
Die Elemente des Vektors U 0 sind gleich der Summe der Quellspannungen der betreffenden Masche. Das jeweilige Vorzeichen
der Quellspannungen ist negativ, wenn die Orientierung des Graphen mit der Umlaufrichtung der Masche übereinstimmt, ansonsten positiv.
D.h.: Masche 1 bestimmt Element 1 von U 0 und dieses enthält
-U01, -U06 und +U05. Also insgesamt
– U 01 + U 05 – U 06
U0 =
– U 02 + U 06 – U 07
– U 03 + U 07 – U 08
– U 04 + U 08 – U 05
Praktischer Hinweis: Enthält ein Netzwerk nur einen Generator
und gelingt es, diesen in einem Verbindungszweig unterzubringen,
dann hat U 0 nur diese eine, von Null verschiedene Komponente.
Es kann also auch U 0 direkt aus dem vollständigen Baum abgelesen werden.
Lineare Netzwerke
Das Maschengleichungssystem zur Bestimmung der unabhängigen Ströme kann also allein aufgrund topologischer Überlegungen direkt aufgestellt werden.
Seite 61
Seite 62
GET-Skript
4.5.4 Berechnung eines Beispiels
Gegeben:
Gesucht: I
I
Aufstellung des Graphen und des vollständigen Baumes
4
3
1
2
5
6
Zweig mit gesuchtem Strom I (Zweig 2) und Zweig mit Generator
(Zweig 1) werden zu Verbindungzweigen, d.h.
- Strom I2 wird unabhängige Variable
- Quellspannungsvektor wird bis auf eine Komponente gleich
Null.
Numerierung:
- Erst Verbindungszweige (1, 2, 3)
- Dann Baumzweige (4, 5, 6)
Die Zählrichtung (Orientierung des Graphen) ist willkürlich.
Die unabhängigen Ströme sind I1, I2 I3 . Diese bestimmen drei linear unabhängige Maschen 1, 2 und 3 , deren Umalufrichtung in
Lineare Netzwerke
Seite 63
Richtung des enthaltenen Verbindungszweiges festgelegt wird.
4
4
1
2
1
5
5
2
3
3
5
6
6
Daraus ergibt sich für die Diagonalelemente
W 11 = ( R 1 + R 4 + R 5 ) Widerstände der Masche 1
W 22 = ( R 2 + R 5 + R 6 ) Widerstände der Masche 2
W 33 = ( R 3 + R 4 + R 5 + R 6 ) Widerstände der Masche 3
Für die weiteren Elemente der Matrix:
Gemeinsamer Zweig von Masche 1 und Masche 2 ist Zweig 5.
Umlaufrichtungen der Maschen entgegengesetzt, also negatives
Vorzeichen: W 12 = W 21 = – R 5
Gemeinsame Zweige von Masche 1 und 3 sind Zweige 4 und 5.
Umlaufrichtungen entgegengesetzt, also negatives Vorzeichen:
W 13 = W 31 = – ( R 4 + R 5 )
Gemeinsame Zweige von Masche 2 und 3 sind Zweige 5 und 6.
Umlaufrichtungen gleichsinnig, also positives Vorzeichen:
W 23 = W 32 = ( R 5 + R 6 )
Damit W M bekannt
WM =
( R1 + R4 + R5 )
– R5
–( R4 + R5 )
– R5
( R2 + R5 + R6 )
( R5 + R6 )
–( R4 + R5 )
( R5 + R6 )
( R3 + R4 + R5 + R6 )
Der Quellspannungsvektor U 0 besteht nur aus einem Element
(nur ein Generator im Verbindungszweig).
Quellspannung in Masche 1, Richtung des Zählpfeils in Umlaufrichtung, also negatives Vorzeichen.
Seite 64
GET-Skript
I1
– U 01
U0 =
,
I = I2
0
0
I3
Das Gleichungssystem heißt daher:
W M ⋅ I = U0
oder
( R1 + R4 + R5 ) ⋅ I 1
– R5 ⋅ I 2
–( R4 + R5 ) ⋅ I 3
– R5 ⋅ I 1 + ( R2 + R5 + R6 ) ⋅ I 2
+ ( R5 + R6 ) ⋅ I 3
–( R4 + R5 ) ⋅ I 1
= –U
01
= 0
+ ( R5 + R6 ) ⋅ I 2 + ( R3 + R4 + R5 + R6 ) ⋅ I 3
= 0
Dieses Gleichungssystem kann man noch „zu Fuß“ lösen.
Bei größeren Systemen benutzt man die aus der Mathematik bekannten Verfahren zur Lösung linearer Gleichungssysteme.
4.6 Knotenanalyse
4.6.1 Schritte des Rechenverfahrens
Gesucht: Spannungen U υ einiger/aller Zweige.
Vorgehensweise:
- Vollständigen Baum aufstellen. Falls nur wenige Spannungen
U υ gesucht sind, Baum nach Möglichkeit so wählen, daß die
gesuchten Spannungen an Baumzweigen abfallen, also unabhängige Variable werden.
- Einen Knoten aussondern und für die restlichen (k-1) Knoten
die Knotengleichungen aufstellen. Die Auswahl des einen Knoten ist willkürlich, oft wird aber ein Sternpunkt im Baum, ein
geerdeter Knoten o.ä. ausgesondert.
- Ströme der Knotengleichungen mittels Zweipolgleichungen
durch Spannungen ausdrücken: I υ = I 0υ + G υ U υ .
- In diesen (k-1)Knotengleichungen sind jetzt i. a. noch alle z
Spannungen U υ als Unbekannte enthalten. Mit der Maschenregel können (z-k+1) abhängige Spannungen sofort durch (k-1)
unabhängige Spannungen ersetzt werden.
- Diese (k-1) Gleichungen mit (k-1) Unbekannten kann man sofort auflösen und kennte alle unabhängigen Spannungen.
- Sind alle Spannungen gesucht, mit Maschenregel abhängige
Spannungen berechnen.
- Es zeigt sich, daß man bei einer bestimmten Wahl des Baumes
Lineare Netzwerke
Seite 65
und des ausgesonderten Knotens (Bezugsknotens) die Gleichungen aus dem vollständigen Baum ablesen und direkt aufstellen kann.
4.6.2 Herleitung des Gleichungssystems
Gegeben: Orientierter Graph des Netzwerks mit k=5 und z=8
Gesucht:Die Spannungen U υ
A
1
4
5
E
B
6
C
8
7
2
3
D
Aufstellen des vollständigen Baumes
Falls alle Spannungen gesucht, beliebiger Baum
Falls z.B. U5, U6, U7, U8 gesucht, Baum so wählen, daß Zweige 5,
6, 7, 8 Baumzweige werden. Die Abbildung zeigt ein Beispiel für
einen vollständigen Baum, bei dem U5, U6, U7 und U8 über Baumzweigen abfallen und somit unabhängige Spannungen sind.
A
5
B
E
6
8
C
7
D
Aufstellen der Knotengleichungen
Von den k (also 5) Knoten wird E als Sternpunkt ausgesondert und
man kann mit den restlichen (k-1) (also 4) Knoten linear unabhängige Knotengleichungen aufstellen:
Seite 66
I1
– I 4 +I 5
– I 1 +I 2
=0
+I 6
– I 2 +I 3
GET-Skript
=0
+I 7
– I 3 +I 4
=0
+I 8 = 0
Ströme durch Spannungen ausdrücken
Die Ströme können mit Hilfe der Zweipolgleichungen
I υ = I 0υ + G υ U υ ersetzt werden und man erhält:
- I 04 + G 4 U 4
+ I 05 + G 5 U 5 = 0
– I 01 + G 1 U 1 + I 02 + G 2 U 2
+ I 06 + G 6 U 6 = 0
I 01 + G 1 U 1
– I 02 + G 2 U 2
+ I 03 + G 3 U 3 + I 07 + G 7 U 7 = 0
– I 03 + G 3 U 3 + I 04 + G 4 G 4
+ I 08 + G 8 U 8 = 0
Abhängige Spannungen durch unabhängige ersetzen
Mit den Maschengleichungen werden jetzt (z - k + 1) (also 4) abhängige Spannungen durch unabhängige ausgedrückt:
U1 =
U 5 -U 6
U2 =
U 6 -U 7
U3 =
U 4 = -U 5
U 7 -U 8
U8
und man kann U1 ... U4 aus den Knotengleichungen eliminieren:
I 01 + G 1 ( U 5 – U 6 )
- I 04 + G 4 ( U 8 – U 5 ) + I 05 + G 5 U 5
=0
- I 01 + G 1 ( U 5 – U 6 ) + I 02 + G 2 ( U 6 – U 7 ) + I 06 + G 6 U 6
=0
- I 02 + G 2 ( U 6 – U 7 ) + I 03 + G 3 ( U 7 – U 8 ) + I 07 + G 7 U 7
=0
- I 03 + G 3 (U 7 – U 8 ) + I 04 + G 4 ( U 8 – U 5 ) + I 08 + G 8 U 8
=0
Diese (k - 1), (also 4) Gleichungen enthalten nur (k-1) Unbekannte,
nämlich die unabhängigen Spannungen. Im günstigsten Fall sind
dies bereits die gesuchten Spannungen.
Lineare Netzwerke
Sind alle z Spannungen gesucht, dann abhängige durch (bereits bekannte) unabhängige Spannungen ausdrücken (Maschengleichungen).
Seite 67
Seite 68
GET-Skript
4.6.3 Unmittelbare Aufstellung des Gleichungssystems
In umgestellter Form lautet das Gleichungssystem unseres Beispiels:
( G 1 + G 4 + G 5 )U 5
-G 1 U 5
-G 1 U 6
+ ( G 1 + G 2 + G 6 )U 6
-G 2 U 6
-G 4 U 5
-G 4 U 8
= -I 01 + I 04 – I 05
-G 3 U 8
= -I 02 + I 01 – I 06
= -I 03 + I 02 – I 07
-G 2 U 7
+ ( G 2 + G 3 + G 7 )U 7
-G 3 U 7
+ ( G 3 + G 4 + G 8 )U 8 = -I 04 + I 03 – I 08
Dieses Gleichungssystem läßt sich auch in der Form
W B ⋅ UB = I0
schreiben, wenn man die Knotenleitwertmatrix
WB
,
den Vektoor der Baumzweigspannungen U B
und den Quellstromvektor I 0 wie folgt definiert:
(G + G + G )
– G1
0
– G4
1
4
5
-G 1
( G1 + G2 + G6 )
-G 2
0
WB =
0
-G 2
( G2 + G3 + G7 )
-G 3
-G 4
0
-G 3
( G3 + G4 + G8 )
U5
UB =
U6
U7
U8
-I 01 + I 04 – I 05
und I 0 =
-I 02 + I 01 – I 06
-I 03 + I 02 – I 07
-I 04 + I 03 – I 08
Lineare Netzwerke
Die Knotenleitwertmatrix W B zeigt folgende (hier nicht bewiesene) Gesetzmäßigkeit:
Die Elemente der Hauptdiagonalen sind gleich der Summe der
Leitwerte der vom betreffenden Knoten ausgehenden Elemente.
Numeriert man die Knoten A = 1, B = 2, C = 3, D = 4, so sieht
man:
Das Diagonalelement W11 ist gleich der Summe der Leitwerte von
Knoten 1.
W 11 = ( G 1 + G 4 + G 5 )
W 22 = ( G 1 + G 2 + G 6 )
W 33 = ( G 2 + G 3 + G 7 )
W 44 = ( G 3 + G 4 + G 8 )
Die übrigen Elemente der Matrix W B werden von den Leitwerten gebildet, die den verschiedenen Knoten gemeinsam sind.
D. h. G1 ist Knoten 1 und 2 gemeinsam und bestimmt das Element
W 12 = W 21 von W B . Das Vorzeichen ist negativ! Also:
W 12
W 23
W 34
W 41
=
=
=
=
W 21
W 32
W 43
W 14
=
=
=
=
-G 1
-G 2
-G 3
-G 4
Alle anderen Matrixelemente W mn sind Null, wenn Knoten m und
n keine gemeinsamen Elemente haben, also nicht über G υ verbunden sind.
Der Vektor I 0 enthält ausschließlich Quellströme (Spannungsquellen umrechnen!) und zeigt folgende (hier nicht bewiesene)
Gesetzmäßigkeit:
Die Elemente des Vektors I 0 sind gleich der Summe der einge-
Seite 69
Seite 70
GET-Skript
prägten Ströme aller Zweige, die im betreffenden Knoten zusammentreffen. Die zufließenden Ströme sind dabei positiv, die abfließenden negativ gezählt.
(Vereinbart man die umgekehrte Zählrichtung, so erhält auch der
Vektor I 0 ein negatives Vorzeichen!)
Diese beobachteten Gesetzmäßigkeiten gelten aber nicht allgemein, sondern nur unter folgenden Bedingungen:
- Der Baum verbindet strahlenförmig alle (k - 1) Knoten mit einem k-ten Knoten, dem Bezugsknoten.
- Der Bezugsknoten wird für die Knotengleichungen nicht benutzt.
- Die Zählpfeile der unabhängigen Spannungen weisen auf den
Bezugsknoten zu.
Unter diesen Bedingungen ist das Gleichungssystem direkt aus
dem vollständigen Baum ablesbar.
Dieser Vorteil der Ablesbarkeit und der Symmetrie der Matrix hat
dazu geführt, daß man bei der Knotenanalyse praktisch immer diese Bedingungen einhält.
Selbst wenn kein Baum gefunden werden kann, bei dem alle Knoten sternförmig mit dem Bezugsknoten verbunden sind, so werden
solche Knoten über zusätzliche Zweige mit Leitwert Null mit dem
Bezugsknoten verbunden.
4.6.4 Berechnung eines Beispiels:
Gegeben:
Gesucht: U
U
Lineare Netzwerke
Seite 71
Aufstellung des Graphen und des vollständigen Baumes.
Das Gleichungssystem soll aus dem vollständigen Baum abgelesen werden, also:
- Bezugsknoten im Graphen festlegen
- Vollständigen Baum durch sternförmiges Anbinden aller (k - 1)
weiteren Knoten erstellen
- Baumzweige auf den Bezugsknoten zu orientieren
2
4
4
5
Bezugsknoten
2
4
3
1 1
2
6
4
2
1
5
3
3
Wählt man Knoten 4 als Bezugsknoten, so wird die gesuchte Spannung U2 Baumzweigspannung, also unabhängig.
Dann ergibt sich für die Diagonalelemente von W B :
W 11 = G 2 + G 3 + G 6 Leitwerte des Knoten 1
W 22 = G 1 + G 3 + G 4 Leitwerte des Knoten 2
W 33 = G 1 + G 5 + G 6 Leitwerte des Knoten 3
Für die anderen Elemente von W B ergibt sich:
Gemeinsamer Zweig von Knoten 1 und 2 ist Zweig 3, also
W 12 = W 21 = -G 3
Gemeinsamer Zweig von Knoten 1 und 3 ist Zweig 6, also
W 13 = W 31 = -G 6
Gemeinsamer Zweig von Knoten 2 und 3 ist Zweig 1, also
W 23 = W 32 = -G 1
Damit sind alle Elemente von W B bekannt.
Seite 72
GET-Skript
( G2 + G3 + G6 )
-G 3
-G 6
-G 3
( G1 + G3 + G4 )
-G 1
-G 6
-G 1
( G1 + G5 + G6 )
WB =
Der Quellstromvektor I 0
Im Knoten 1 treffen zusammen: Zweig 2, 3, 6
Im Knoten 2 treffen zusammen: Zweig 1, 3, 4
Im Knoten 3 treffen zusammen: Zweig 1, 5, 6
Nur Zweig 1 enthält eine Stromquelle I 01 , die auf Knoten 3 zu (+)
und von Knoten 2 weg (-) orientiert ist. Daraus ergibt sich:
I0
0
= -I 01
I 01
Dieses Gleichungssystem kann nach bekannten Regeln gelöst werden.
Lineare Netzwerke
Seite 73
4.7 Berechnung von Netzwerken nach dem Überlagerungsprinzip
Bei Netzwerken mit mehreren Quellen kann man in geeigneten
Fällen auch das Überlagerungsprinzip anwenden (genauere Begründung im Kapitel „Elektromagnetische Felder“).
Ist eine Spannung/ein Strom im Zweig υ gesucht und sind n Spannungsquellen/Stromquellen vorhanden, so kann man wie folgt vorgehen:
- Alle Quellen bis auf U 01 bzw. I 01 ausschalten (Spannungsquellen kurzschließen, Stromquellen unterbrechen). Damit
Spannung U υ1 /Strom I υ1 im Zweig υ für Quelle 1 berechnen.
- Alle Quellen bis auf U 02 bzw. I 02 ausschalten. Damit Spannung U υ2 bzw. Strom I υ2 im Zweig υ für Quelle 2 berechnen.
- Für alle weiteren Quellen ähnlich verfahren bis zur letzten
Quelle n und U υn bzw. I υ n berechnen.
- Die gesuchte Spannung U υ /der gesuchte Strom I υ ist dann
U υ = U υ1 + U υ2 + ... + U υn bzw.
I υ = I υ1 + I υ2 + ... + I υn
Beispiel:
R1
U1
U2 = 0 ;
Gesucht: U3
R2
R3
U3
U2
U 1 eingeschaltet
R2 ⋅ R3
R2 ⋅ R3
U 31 ⁄ U 1 = ------------------ ⁄ -----------------+ R 1 und
R 2 + R 3 R 2 + R 3
R2 ⋅ R3
U 31 = U 1 ⋅ --------------------------------------------------------------R2 ⋅ R3 + R2 ⋅ R1 + R3 ⋅ R1
Seite 74
GET-Skript
U1 = 0 ;
U 2 eingeschaltet
R1 ⋅ R3
U 32 = U 2 ⋅ --------------------------------------------------------------R2 ⋅ R3 + R2 ⋅ R1 + R3 ⋅ R1
Aus U31 und U32 ergibt sich dann
U 1 ⋅ R2 ⋅ R3 + U 2 ⋅ R1 ⋅ R3
U 3 = U 31 + U 32 = -------------------------------------------------------------R2 ⋅ R3 + R2 ⋅ R1 + R3 ⋅ R1
Seite 75
5,6,7 Elektrische und magnetische Felder
Elektrische und magnetische Felder ermöglichen eine einfache
Beschreibung der Kräfte auf ruhende und bewegte Ladungen. Diese Felder, ihre Struktur, ihre Quellen, sowie ihr wechselseitiges
Zusammenwirken wird durch einen Satz von Gleichungen beschrieben. Diese Grundgesetze lassen sich mithilfe der Begriffe
Fluß und Zirkulation einfach formulieren.
Grundgesetze
(1)
(Der Fluß von E durch eine beliebige Hüllfläche A) =
= (Netto-Ladung innerhalb der Hüllfläche) /ε 0
(2)
(Die Zirkulation von E um den Rand Γ einer beliebigen
Fläche A =
= - d ⁄ ( dt ) (des Flusses von B durch diese Fläche A)
(3)
(Der Fluß von B durch eine beliebige Hüllfläche A) = 0
(4)
1 ⁄ µ 0 (Zirkulation von B um den Rand Γ einer beliebigen
Fläche A =
= (Fluß des elektrischen Stroms durch diese Fläche A) +
d
+ ----- (des Flusses von E durch diese Fläche A) ⋅ ε 0
dt
(5)
Das bereits bekannte Kraft-Gesetz
Die Grundgesetze (1) bis (4) sind hier in der sog. Integralform geschrieben und heißen Maxwell‘sche Feld-Gleichungen
(1)
°∫A E ⋅ d A
(2)
°∫Γ E ⋅ ds
= – ---- ∫ B ⋅ d A
∂t A
(3)
°∫A B ⋅ d A
= 0
= q ⁄ ε0
∂
1
( 4 ) ----- ∫ B ⋅ ds =
°
µ0 Γ
∂
⋅ dA
∫A S + ε0 ⋅ ∂----E
t
Das Kraftgesetz (5) heißt Lorentz-Beziehung
(5) F = q ⋅ (E + υ × B)
Seite 76
GET-Skript
Die Maxwell‘schen Feldgleichungen bieten zwar eine einfache
Beschreibung aller elektrotechnischen Probleme, eine einfache
und geschlossene Lösung der Probleme ist jedoch nur in Spezialfällen zu erzielen. Insbesondere lassen sich Lösungen finden, wenn
vereinfachte Randbedingungen angenommen werden. Dabei wird
z.B. angenommen, daß keine, oder nur langsame zeitliche Änderungen der Felder auftreten, daß nur elektrische oder nur magnetische Felder vorhanden sind.
Die Beschreibung der Maxwell‘schen Gleichungen unter ausschließlicher Verwendung von E und B vereinfacht den Zugang.
Die in der Elektrotechnik übliche Schreibweise unter zusätzlicher
Verwendung der Feldvektoren D und H wird an geeigneter Stelle
eingeführt.
Elektrostatik
5
Seite 77
Elektrostatik
5.1 Vereinfachung der Grundgesetze für die Elektrostatik
Was heißt „Elektro-statik“?
„Elektro-“Wir wollen uns zunächst nur mit elektrischen Feldern,
den darin auftretenden Kräften und deren Wirkungen beschäftigen, nicht mit magnetischen Feldern und Kräften
„statik“:Wir wollen uns nicht mit zeitlich veränderlichen Feldern
befassen.
Nur elektrische Felder heißt: B = 0
und dann wird aus ( 2 )
( 2′ )
°∫Γ E ⋅ ds
°∫Γ E ⋅ ds
∂
= – ---- ∫ B ⋅ d A die Gleichung
∂t A
= 0
Ähnlich wird aus ( 5 ) F = q ⋅ ( E + υ × B ) die Gleichung
( 5′ ) F = q ⋅ E
Die Gleichung ( 3 )
°∫A B ⋅ d A
= 0 beschreibt nur B und entfällt.
Nur „statische“ elektrische Felder heißt ∂E ⁄ ∂t = 0
1
Dann beschreibt ( 4 ) ----- ∫ B ⋅ ds =
°
µ0 Γ
∂
⋅ dA
∫A S + ε0 ⋅ ∂----E
t
nur B -Felder und entfällt für die Elektrostatik.
Damit gelten folgende vereinfachte Gesetze der Elektrostatik
(1)
°∫A E ⋅ d A
( 2′ )
°∫Γ E ⋅ ds
= q ⁄ ε0
= 0
( 5′ ) F = q ⋅ E
- Nur noch zwei Gleichungen zur Beschreibung der Felder (davon 2‘ stark vereinfacht).
- Eine vereinfachte Gleichung zur Beschreibung der Kräfte.
Seite 78
GET-Skript
Welchen Sinn hat diese Vereinfachung?
- Es gibt genügend elektrotechnische Aufgabenstellungen, die
damit gelöst werden können.
- Die mit diesen Vereinfachungen gefundenen Formeln gelten
dann aber nur für elektrostatische Probleme .
Gehört es noch zur Elektrostatik, wenn Kräfte auf Ladungen berechnet werden, die sich im elektrostatischen Feld bewegen also
ein Magnetfeld erzeugen?
Ja, denn es war vereinbart, die Felder der betrachteten Ladungen
nicht in die Kraftberechnung einzubeziehen (vgl. 1.3).
5.2 Berechnung symmetrischer Felder
5.2.1 Das E -Feld einer Punktladung
Die richtige Wahl der Koordinaten-Systems vereinfacht oft die
Lösung. Hier: kugelsymmetrisches Problem, also Berechnung bequemer in Kugelkoordinaten.
ϕ
r
E(r 0, ϑ 0, ϕ 0)
E r(r 0, ϑ 0, ϕ 0)
E(r 0, ϑ 0, ϕ 0) = E ϑ(r 0, ϑ 0, ϕ 0)
E ϕ(r 0, ϑ 0, ϕ 0)
ϑ
Am betrachteten Punkt (r,ϑ, ϕ) hat E eine radiale Komponente
E r = E r ( r, ϑ, ϕ ) sowie die beiden tangentialen Komponenten
E ϑ = E ϑ ( r, ϑ, ϕ ) und E ϕ = E ϕ ( r, ϑ, ϕ ), wobei E r ⊥E ϑ ⊥E ϕ .
E wird also beschrieben durch den Vektor
E r (r,ϑ, ϕ)
E ( r, ϑ, ϕ ) = E ϑ (r, ϑ,ϕ)
E ϕ (r, ϑ,ϕ)
Elektrostatik
Seite 79
Wegen der Kugelsymmetrie gibt es auf der Kugeloberfläche keine
Vorzugsrichtung, d.h. die tangentialen Komponenten sind Null
und E ( r, ϑ, ϕ ) = ( E r ( r, ϑ, ϕ ), 0, 0 ) .
Ebenfalls wegen der Kugelsymmetrie hängt die radiale Komponente nur vom Abstand r, nicht aber von ϑ oder ϕ ab, also
E ( r, ϑ, ϕ ) = ( E r ( r ), 0, 0 ) = E r ( r ) ⋅ e r
wobei e r ein Einheitsvektor in radialer Richtung ist.
Für dieses E-Feld läßt sich aber die Gl (1) auswerten und es ist
(1)
°∫A E ⋅ d A
=
°∫A E r ( r ) ⋅ er ⋅ d A
°∫A E r ( r ) ⋅ dA =
=
= E r ( r ) ⋅ ∫ d A = E r ( r ) ⋅ 4π ⋅ r = q ⁄ ε 0
°A
2
(Beachte: A ist eine Kugeloberfläche, also r = konstant. E ist somit auf dem gesamten Integrationsgebiet konstant und parallel
zum Flächenvektor, also Spezialfall 1).
2
2
Aus E r ( r ) ⋅ 4π ⋅ r = q ⁄ ε 0 ergibt sich E r ( r ) = q ⁄ ( 4πε 0 ⋅ r ) ,
also die gesuchte Abhängigkeit der Komponente E r von r.
Feld einer Punktladung
q
E = --------------------2- ⋅ e r
4πε 0 ⋅ r
Weil e r ein Einheitsvektor mit dem Betrag 1 und der Richtung r
ist, ist e r = r ⁄ r und man kann auch schreiben
q
E = --------------------3- ⋅ r
4πε 0 ⋅ r
Beachte: die tangentialen Komponenten von E sind nicht nur aus
Symmetriegründen Null. Tangentiale Komponenten würden auch
( 2′ ) ∫ E ⋅ ds = 0 widersprechen.
°Γ
Seite 80
GET-Skript
Beispiel: Kraftwirkung zwischen zwei Punktladungen
(Coulumb‘sches Gesetz)
Kraft F 1 auf q1 im Feld E 2 von q2
r12
F1
+ q1
E2(1)
+ q2
e 12
Nach Gl. (5‘) ist F = q ⋅ E .
Wir bezeichnen
F 1 = F auf q 1
E 2 ( 1 ) = E von Ladung 2 am Ort der Ladung 1,
wobei ( 1 ) = ( r 1, ϑ 1, ϕ 1 ) = ( x 1, y 1, z 1 ) eine abgekürzte Schreibweise für die Koordinaten der Ladung 1 ist
und e 12 der Einheitsvektor nach q1 von q2.
Dann lautet (5‘)
q2
- ⋅ e 12
F 1 = q 1 ⋅ E 2 ( 1 ) = q 1 ⋅ ----------------------2
4πε 0 ⋅ r 12
Entsprechend ist Kraft F 2 auf q2 im Feld E 1 von q1
q1
- ⋅ e 21 und weil e 21 = -e 12
F 2 = q 2 ⋅ E 1 ( 2 ) = q 2 ⋅ ----------------------2
4πε 0 ⋅ r 21
kann man schreiben
q1 ⋅ q2
F 1 = ------------------------⋅ e 12 = – F 2 Coulomb‘sches Gesetz
2
4πε 0 ⋅ r 12
Während die alte Schreibweise des Coulomb‘schen Gesetzes nur
die Größe der Kraft beschrieb, führt die Darstellung anhand des
elektrischen Feldes auch zum richtigen Vorzeichen für F und berücksichtigt das Vorzeichen von q.
Elektrostatik
Seite 81
Die Proportionalitätskonstante ε 0 hat im MKSA-System den Wert
ε 0 = 8.854 ⋅ 10
-12
2
As
-12 ( As )
-------- = 8.854 ⋅ 10 ------------2
Vm
Nm
bzw.
2
1
9 Vm
9 Nm
------------ ≈ 9 ⋅ 10 -------- = 9 ⋅ 10 -------------2
4πε 0
As
( As )
also q in As oder C (Coulomb), r in m (Meter),
F in N (Newton) = m kg/ s2.
5.2.2 Feld einer „Linienladung“
λ = Ladung / Länge heißt Linienladung
Er
Ez
(Eϕ)=Et
r
(r, z, ϕ)
Linienladung
z
Ladung
λ = -----------------Länge
ϕ
0
Hier: Berechnung in Zylinderkoordinaten vorteilhaft
Am betrachteten Punkt (r,z, ϕ) hat E eine radiale Komponente
E r = E r (r,z, ϕ) sowie die beiden tangentialen Komponenten
E z = E z (r,z, ϕ) und E ϕ = E ϕ (r,z, ϕ) , wobei E r ⊥E z ⊥E ϕ .
E wird also beschrieben durch den Vektor
E r (r,z, ϕ)
E (r,z, ϕ) = E z (r,z, ϕ)
E ϕ (r,z, ϕ)
Auf der Zylinderoberfläche gibt es keine bevorzugte Längsrichtung und keinen bevorzugten Umlaufsinn, d.h. die tangentialen
Komponenten sind Null und
E (r,z, ϕ) = ( E r (r,z, ϕ), 0, 0 ) .
Seite 82
GET-Skript
Aus den genannten Symmetriegründen hängt die radiale Komponente nur vom Abstand r, nicht aber von z oder ϕ ab, also
E (r,z, ϕ) = ( E r ( r ), 0, 0 ) = E r ( r ) ⋅ e r
wobei e r ein Einheitsvektor in radialer Richtung ist.
Für dieses E-Feld läßt sich aber die Gl (1) auswerten wobei das Integrationsgebiet ein Zylinder der Länge l mit Radius r ist. Es ist
Oberfläche A = Oberfläche Mantel + 2 Oberflächen Deckel:
°∫A E ⋅ d A
=
∫Mantel E ⋅ d A + 2 ∫Deckel E ⋅ d A
Weil E r ⊥d A bei der Deckelfläche, ist
alfall 2) und
°∫A E ⋅ d A
=
=
∫Deckel E ⋅ d A = 0 (Spezi-
∫Mantel E ⋅ d A = ∫Mantel E r ( r ) ⋅ er ⋅ d A =
∫Mantel E r ( r ) ⋅ d A = E r ( r ) ⋅ ∫Mantel d A = E r ( r ) ⋅ 2πr ⋅ l
(Beachte: A ist ein Zylindermantel, also r = konstant. E ist somit
auf dem gesamten Integrationsgebiet konstant und parallel zum
Flächenvektor, also Spezialfall 1).
λ = Ladung / Länge, also eingeschlossene Ladung q = λ ⋅ l und
°∫A E ⋅ d A = E r ( r ) ⋅ 2πr ⋅ l = q ⁄ ε0 = λ ⋅ l ⁄ ε0
Aus E r ( r ) ⋅ 2πr ⋅ l = λ ⋅ l ⁄ ε 0 ergibt sich E r ( r ) = λ ⁄ ( 2πε 0 ⋅ r ) ,
also die gesuchte Abhängigkeit der Komponente E r von r. Somit:
Feld einer Linienladung
λ
E ( r ) = ------------------- ⋅ e r
2πε 0 ⋅ r
Weil e r ein Einheitsvektor mit dem Betrag 1 und der Richtung r
ist, ist e r = r ⁄ r und man kann auch schreiben
λ
E ( r ) = --------------------2- ⋅ r
2πε 0 ⋅ r
Elektrostatik
Seite 83
5.2.3 Feld einer gleichförmigen Flächenladung σ
σ = Ladung/Fläche heißt Flächenladung
gleichförmig
geladene Fläche
b
l
E ( x, y, z )
x
y
z
x
Hier: Berechnung in kartesischen Koordinaten vorteilhaft.
E x ( x, y, z )
E ( x, y, z ) = E y ( x, y, z )
E z ( x, y, z )
Parallel zur geladenen Fläche gibt es keine Vorzugsrichtung, d.h.
die tangentialen Komponenten Ey und Ez sind Null und
E ( x, y, z ) = ( E x ( x, y, z ), 0, 0 )
Aus Symmetriegründen hängt E nicht von y und nicht von z ab.
D. h. auf einer zur geladenen Fläche parallelen Fläche im Abstand
x ist
E ( x, y, z ) = ( E x ( x ), 0, 0 ) = E x ( x ) ⋅ e n
wobei e n ein Normalvektor, also ein Einheitsvektor in Richtung
der Flächennormalen ist. Für x>0 zeigt also e n = x ⁄ x in Richtung der x-Achse, für x<0 in entgegengesetzte Richtung. Für dieses E-Feld läßt sich aber Gl (1) auswerten, wobei das Integrationsgebiet ein Kasten der Höhe 2x mit Länge l und Breite b ist. Dieser
Kasten hat die Oberfläche A = vordere Fläche + hintere Fläche +
4 Seitenflächen. Die eingeschl. Ladung ist q = σ ⋅ l ⋅ b . Dann ist
°∫A Ed A = ∫vorne E x ( x ) ⋅ en d A + ∫hinten E x ( x ) ⋅ en d A + 4 ⋅ ∫Seite
Seite 84
GET-Skript
Weil e n parallel zu den Seitenflächen verläuft, liefern liefern die
vier Integrale keine Beiträg (Spezialfall 2), also
°∫A Ed A
=
∫vorne E x ( x ) ⋅ en d A + ∫hinten E x ( x ) ⋅ en d A
Weil auf beiden Deckflächen e n || d A und Ex(x) konstant und
gleich groß ist, liefern beide Integrale gleiche Beiträge und es gilt
Spezialfall 1. Also
°∫A Ed A
= 2⋅∫
E x ( x ) ⋅ e n d A + 2E x ( x ) ⋅ ∫
vorne
vorne
en d A
= 2 ⋅ E x ( x ) ⋅ l ⋅ b = σ ⋅ l ⋅ b ⁄ ε0
σ
Damit ist E x ( x ) = -------- = E x unabhänigig von x
2ε 0
σ
und E ( x, y, z ) = -------- ⋅ e n Feld einer Flächenladung
2ε 0
5.3 Berechnung beliebiger Felder mit bekannter Ladungsverteilung
5.3.1 Superposition der E -Felder aller Einzelladungen
(a) Diskrete Ladungsverteilung
q3
q4
qi
q2
r14
r1i
(1)=(x1,y1,z1)
E(1)
Die Beiträge der einzelnen Ladungen qi zum E-Feld sind
qi
1
- ⋅ e 1i und addieren sich zu E ( 1 ) =
E i ( 1 ) = ------------ ⋅ ----2
4πε 0 r 1i
also
1
E ( 1 ) = -----------4πε 0
qi
∑ ----r2
i
1i
⋅ e 1i
∑ Ei(1)
i
Elektrostatik
Seite 85
(b) Verteilung mit räumlicher Ladungsdichte ρ ( x, y, z )
E(1)
dV2
(1)=(x1,y1,z1)
r12
ρ(x,y,z)
(2)=(x2,y2,z2)
ρ ( 2 ) = ρ (x 2, y 2,z 2) = dq 2 ⁄ dV 2 also dq 2 = ρ ( 2 ) ⋅ dV 2 und
1
E ( 1 ) = -----------4πε 0
ρ ( 2 )e 12 dV 2
---------------------------∫
2
r 12
gesamten Raum
Vorsicht! Sieht nur so harmlos aus. Integration über drei Komponenten und den gesamten Raum. Deshalb ist die später eingeführte
Lösung besser, bei der zunächst das skalare Potential und daraus
E berechnet wird.
5.3.2 Superposition der Potentiale aller Einzelladungen
Für die praktische Berechnung von Feldern benutzt man nicht die
Formeln aus 5.3.1, sondern einfachere Summen bzw. Integrale, die
keine Vektoren enthalten sondern eine skalare Größe, das Potential ϕ (siehe 2.4). Dann gilt
q
1
ϕ ( 1 ) = ------------ ∑ -----i- bzw.
4πε 0 i r 1i
1 ρ ( 2 )dV
ϕ ( 1 ) = ------------ ∫ ---------------------2
4πε 0
r 12
mit
∂ϕ ( 1 ) ∂ϕ ( 1 ) ∂ϕ ( 1 )
E ( 1 ) = – --------------- , ---------------, ---------------
∂x
∂y
∂z
(Begründung in 5.4.4)
Seite 86
GET-Skript
5.4 Das elektrostatische Potential
5.4.1 Arbeit einer im E -Feld bewegten Ladung
In Kapitel 2.4 war die Arbeit einer von a → b bewegten Ladung,
die hier q0 genannt werden soll zu
b
– W ( a → b ) = q 0 ⋅ [ ϕ ( a ) – ϕ ( b ) ] = q 0 ⋅ U ab = q 0 ⋅ ∫ E ds
a
berechnet worden. Dabei war nicht bewiesen worden, daß die Arbeit nur von den Punkten a und b, nicht aber vom Weg abhängt.
Weiterhin war angenommen worden, daß sich die potentielle Energie der Ladung an Punkt a bzw. b beschreiben läßt durch
W ( a ) = q0 ⋅ ϕ ( a ) ; W ( b ) = q0 ⋅ ϕ ( b )
Mit dem Grundgesetz Gl (2‘) ergibt sich die Unabhängigkeit vom
Weg. Mit
(2‘)
°∫Γ Eds
q 0 ∫ Eds =
°Γ
= 0 ist auch
°∫Γ q0 Eds
=
°∫Γ Fds
= W Umlauf = 0
Das ist sehr anschaulich, weil man durch Bewegen einer Ladung
auf einem geschlossenen Weg keine Energie gewinnen kann. Insbesondere gilt für einen Weg von a nach b und zurück
b
a
a
b
q 0 ∫ Eds = q 0 ∫ Eds + q 0 ∫ Eds = W ( a → b ) + W ( b → a ) = 0
°
b
a
q0
ds
F
Hält man nun z.B. den Rückweg und damit W ( b → a ) fest, so
muß W ( a → b ) = - W ( b → a ) für alle Hinwege gleich sein.
Ähnliche Überlegungen führen zur Kirchhoff‘schen Maschenregel
°∫ Eds
=
b
c
∫a Eds + ∫b Eds + ...
= U ab + U bc + ... = 0
d.h. die Summe der Spannungen beim Umlauf um eine Masche ist
Null.
Elektrostatik
Seite 87
5.4.2 Potential einer Punktladung
Ladung q 0 wird von Ort a nach Ort b im Feld der Punktladung q
gebracht.
b
a‘
q
a
Weil die Arbeit W ( a → b ) unabhängig vom Weg ist, wählen wir
den Weg a → a' → b . Auf dem tangentialen Teilweg ist E ⊥ ds
und es gilt Fall 2, auf dem radialen Teilweg ist E || ds und es gilt
Fall 1.
a'
b
b
a
a'
a'
W ( a → b ) = – q 0 ∫ E ds – q 0 ∫ E ds = 0 – q 0 ∫ E ds
q ⋅ e r ⋅ ds
1
- = –q0 ⋅
= – q 0 ⋅ ∫ ------------ ⋅ --------------------2
a' 4πε 0
r
b
r=b
∫
r = a'
q
dr
------------ ⋅ ----24πε 0 r
q
q
1 1
1 1
= – q 0 ⋅ ------------ ⋅ ----- – ---- = – q 0 ⋅ ------------ ⋅ ---- – ----
4πε 0 r a' r b
4πε 0 r a r b
Wahl eines Bezugspunktes
Von einem festen Bezugspunkt P aus läßt sich die Arbeit beim
Transport der Probeladung q0 zu jedem beliebigen Ort im E-Feld
ausdrücken, z.B. durch W ( P → a ) und W ( P → b ) . Ebenso wie
die Kraft ist diese Arbeit proportional zu q0 und hängt bei festem
P nur von a bzw. b ab. Deshalb darf man schreiben
W ( P → a ) = q 0 ⋅ ϕ ( a ) und W ( P → b ) = q 0 ⋅ ϕ ( b ) ,
wobei die skalare Funktion ϕ ausschließlich vom Ort abhängt,
also ein skalares Feld, das elektrostatische Potential, beschreibt.
a
b
p
Seite 88
GET-Skript
Mit der potentiellen Energie am Ort a bzw. b bezüglich P läßt sich
auch die Energiedifferenz für den Transport der Probeladung q0
zwischen a und b beschreiben.
W (P → a) + W (a → b) + W (b → P)
= W ( P → a ) + W ( a → b ) – W ( P → b ) = 0 , also
W (a → b) = W (P → b) – W (P → a)
Damit gilt die bereits in 4.2 genannte Beziehung
b
W ( a → b ) = q 0 ⋅ [ ϕ ( b ) – ϕ ( a ) ] = – q 0 ⋅ ∫ E ds
a
Im E-Feld der Punktladung ist
q 1 1
W ( P → a ) = q 0 ⋅ ϕ ( a ) = q 0 ⋅ ------------ ---- – -----
4πε 0 r a r P
q
q
1 1
1 1
also ϕ ( a ) = ------------ ⋅ ---- – ----- und ϕ ( b ) = ------------ ⋅ ---- – -----
4πε 0 r a r P
4πε 0 r b r P
q
1 1
also [ ϕ ( b ) – ϕ ( a ) ] = ------------ ⋅ ---- – ----
4πε 0 r b r a
Der Bezugspunkt P kommt im Ergebnis nicht vor, er kann also irgendwo liegen. Mit der Vereinbarung P liegt im Unendlichen. vereinfacht sich das Potential einer Punktladung mit 1 ⁄ r P → 0 zu
1
q
1
q
ϕ ( a ) = ------------ ⋅ ---- bzw. ϕ ( b ) = ------------ ⋅ ---4πε 0 r b
4πε 0 r a
oder allgemein
q
1
ϕ ( r ) = ------------ ⋅ --4πε 0 r
Man kann also für jeden Punkt ( r, ϑ, ϕ ) im Feld einer Punktladung q eine skalare Größe ϕ ( r, ϑ, ϕ ) ausrechnen und diese ist nur
vom Abstand r abhängig.
ϕ(x,y,z)
r
q
Elektrostatik
Seite 89
5.4.3 Potential beliebiger, bekannter Ladungsverteilungen
Wir haben bisher nur das Potential einer Punktladung betrachtet.
Wie erhält man das Potential ϕ einer beliebigen, bekannten Ladungsverteilung?
Wegen des Superpositionsprinzips ist am Ort (1)
E(1) =
∑ Ei(1)
i
wobei E i das Feld der Teilladung q i ist (vgl. 5.3.1)
Dann ist
1
1
ϕ ( 1 ) = – ∫ E ⋅ ds = – ∫ ∑ E i ⋅ ds =
p
p
i
1
∑ – ∫ E i ⋅ ds = ∑ ϕi ( 1 ) ,
i
p
i
Das Superpositionsprinzip gilt auch für das skalare Feld ϕ .
Also ähnlich 2.4.1.
q2
q3
q4
qi
r14
r1i
ϕ(1)
qi
q
1
1
ϕ i ( 1 ) = ------------ ⋅ ------ und ϕ ( 1 ) = ------------ ∑ -----i4πε 0 i r 1i
4πε 0 r 1i
Ähnlich gilt für das Potential einer kontinuierlichen Verteilung von
Ladungen.
dV2
1
ϕ ( 1 ) = -----------4πε 0
∫
Raum
ϕ(1)
r12
ρ(x,y,z)
ρ ( 2 ) ⋅ dV 2
------------------------r 12
wobei dq 2 = ρ ( 2 ) ⋅ dV 2 die Ladung im Volumenelement dV2 ist.
Seite 90
GET-Skript
Potentiale von Ladungsverteilungen sind einfacher zu berechnen
als E-Felder und erlauben direkt eine Berechnung von Arbeit. Man
kann aber aus dem elektrostatischen Potential auch das E-Feld berechnen und das ist meist viel einfacher als die direkte Berechnung
von E.
5.4.4 Das E -Feld als Gradient des Potentials ϕ
ϕ(x,y,z)
y
z
ϕ(x+dx,y,z)
dx
x
Zur Berechnung von E aus ϕ nehmen wir an, daß die Ladung q0
im Potential ϕ vom Ort x zum Ort ( x + dx ) gebracht wird. Sie ändert dabei ihre Energie W um
∂ϕ
dW = q 0 ⋅ [ ϕ (x + dx,y, z) – ϕ (x,y, z) ] = q 0 ⋅ ------ ⋅ dx
∂x
andererseits ist aber
x + dx
dW = – q 0 ⋅
∫
x + dx
E ds = – q 0 ⋅ E x
x
∫
ds = – q 0 ⋅ E x ⋅ dx
x
Durch Vergleiche folgt
∂ϕ
E x = – -----∂x
Ähnlich findet man
∂ϕ
∂ϕ
E y = – ------ und E z = – -----∂y
∂z
und hat damit alle Komponenten von E , also
∂ϕ ∂ϕ ∂ϕ
∂ ∂ ∂
E = – ( ------ , ------ , ------ ) oder E = – ( ----- , ----- , ----- ) ϕ
∂ x ∂ y ∂z
∂ x ∂ y ∂z
∂ ∂ ∂
Der Vektor ( ----- , ----- , ----- )
∂ x ∂ y ∂z
ist eine Rechenvorschrift, die besagt, daß ϕ nach allen Richtungen
des kartesischen Koordinatensystems differenziert werden soll
und daß die drei Ergebnisse zu einem Vektor zusammengefaßt
werden.
Elektrostatik
Seite 91
Dieser „Vektoroperator“ heißt auch oft „Gradient“, wird abgekürzt mit grad oder ∇ (Nabla). Man schreibt also auch
∂ ∂ ∂
E = – ( ----- , ----- , ----- ) ϕ = – grad ϕ = – ∇ϕ
∂ x ∂ y ∂z
In der Praxis ist es also viel leichter, erst das Potential ϕ und daraus E zu berechnen:
•
Nur ein Integral statt drei weil ϕ skalar ist.
•
1 ⁄ r ist einfacher als r ⁄ r zu integrieren.
•
– ∫ Eds = 0 braucht nicht getrennt überprüft zu werden.
3
°
In einem skalaren Feld kann man alle Punkte mit gleicher Feldgröße verbinden (vgl. Temperaturfeld: Isothermen, Druckfeld: Isobaren). Die Orte gleichen Potentials heißen Äquipotentialflächen.
Feldlinien
E
ϕ=const
Feld und Äquipotentialflächen einer Punktladung
Beachte: Feldlinien sind immer senkrecht zu Äquipotentialflächen
(längs Äquipotentialflächen ist ∇ϕ = 0 !!)
Weiteres Beispiel.
Feldlinien
E
+
−
ϕ=const
Feld und Äquipotentialflächen zweier ungleichnamiger Punktladungen
Seite 92
GET-Skript
5.5 Berechnung von E -Feldern bei unbekannter Ladungsverteilung
Das E -Feld im Inneren eines Leiters
Auf frei bewegliche Elektronen (z. B. in Metall) wirkt F = q ⋅ E
und diese Kraft bewegt die Elektronen solange, bis alle ihren
Gleichgewichtsplatz haben. Die einzige elektrostatische Lösung
ist E = 0 im Inneren des Leiters.
Beachte: Keine Statik sobald Ströme fließen!
Wegen E = 0 → grad ϕ = 0 oder ϕ = const .
Mit E = 0 → ∫ Ed A = q ⁄ ε 0 = 0
°A
→ Keine (Netto-)Ladung im Innern eines Leiters.
Wo sitzen dann die Ladungen eines geladenen Leiters?
Wegen E = 0 im Leiter:
→ alle Ladungen auf der Oberfläche.
→ Et = 0, also Oberfläche ist Äquipotentialfläche und die
Feldlinien stehen senkrecht auf der Oberfläche
Leerer Hohlraum im Inneren eines Leiters
A
E?
Schließt man den Hohlraum in eine Hüllfläche A ein, so muß wegen E = 0 im Leiter
°∫A Ed A
= 0 sein,
d.h. innerhalb A sind höchstens gleichviele positive und negative
Ladungen. Aber
°∫ Eds
∫
=
Hohlraum
∫
Hohlraum
E ds +
∫
0 ⋅ ds = 0 verlangt, daß auch
Leiter
E ds = 0 wird, für alle möglichen Wege im Hohlraum.
Elektrostatik
Seite 93
→ Auch im leeren Hohlraum eines Leiters ist E = 0
(Faraday-Käfig).
Berechnung der Ladungsverteilungen auf Leiteroberflächen
Allgemeine Lösung:
Ladungsverteilung raten und prüfen, ob Oberfläche Äquipotentialfläche ist. Wenn nicht, Ladungsverteilung geeignet ändern und erneut prüfen. Solange fortsetzen, bis Fehler kleiner als eine
vorgegebene Schranke.
Dieses iterative Verfahren eignet sich für numerische Berechnungen, es gibt dafür geeignete Programme.
Spezielle Lösungen:
Das Problem ist gelöst, wenn eine Ladungsverteilung bekannt ist,
mit Äquipotentialflächen der Form des Leiters.
Beispiel: Positive Punktladung neben leitender Fläche
Ein ungleichnamiges Ladungspaar hat eine ebene Äquipotentialfläche, auf der E senkrecht steht. Bringt man die leitende Fläche
in diese Position und nimmt die negative Ladung weg, so darf sich
rechts der Fläche das Feld nicht ändern. Aus dem dann bekannten
Feld auf der Fläche kann dann die Flächenladung berechnet werden (vgl. 5.2.3).
−
+
+ + + + + + + + + + -P
+E +
ϕ=0+
+
Flächenladung σ(P)
Seite 94
GET-Skript
5.6 Kapazität und Influenzerscheinungen
5.6.1 Definition der Kapazität
Zwei parallele ebene Leiter (Fläche A, Abstand d)mit gleichgroßen
entgegengesetzten Ladungen Q bilden einen Kondensator.
→ Die Ladungen sitzen wegen der gegenseitigen Anziehung
auf den Innenseiten der Platten
→ Die Ladungen sind wegen Symmetrie gleichförmig verteilt,
also konstante Flächenladung +σ, – σ .
Aus 5.2.3 ist E x = σ ⁄ 2ε 0 für eine geladene Fläche bekannt. Bei
Überlagerung (Superposition) der E - Felder beider Platten addieren sich zwischen den Platten die x-Komponenten zu E x = σ ⁄ ε 0
und heben sich außerhalb der Platten gegenseitig auf.
+
+
+
+
Platte 1
und
-
Platte 2
-
Kondensator
ergibt
+
+
+
+
Ex=0
σ
E x = ----ε0
Ex=0
Da die Platten leitfähig sind, hat jede ein konstantes Potential ϕ 1
bzw. ϕ 2 , es ist also eine Spsannung U 12 = ϕ 1 – ϕ 2 vorhanden.
Diese ist aber
U 12 =
x+d
∫x
E ds =
x+d
∫x
σ⋅d
Q⋅d
E x dx = E x ⋅ d = ----------- = ------------ε0
A ⋅ ε0
d. h. die Spannung U ist proportional zur Gesamtladung Q.
Diese Proportionalität gilt nicht nur für den ebenen Plattenkondensator, sondern für beliebige geladene Leiteranordnungen. Es sei
bei einer beliebigen Ladung Q eine Spannung U vorhanden. Mit
doppelter Ladung Q verdoppelt sich an jeder Stelle die Flächenladung σ und damit E . Da die geometrische Anordnung und damit
die Integrationswege gleichbleiben, verdoppelt sich auch U. Damit
Elektrostatik
Seite 95
gilt allgemein:
Q = C⋅U
Die Proportionalitätskonstante C heißt Kapazität (Aufnahmefähigkeit). Die Einheit für die Kapazität ist
As
C
[ C ] = ------ = ---- = F = Farad
V
V
Man hat dieser wichtigen Einheit As/V den Namen Farad gegeben. Technische Kondensatoren haben häufig sehr kleine Kapazitäten und es sind folgende Einheiten gebräuchlich:
–3
–6
–9
1mF = 10 F ; 1µF = 10 F ; 1nF = 10 F ; 1 pF = 10
– 12
F
Beispiele für technische Ausführungen: Plattenkondensator, Wikkelkondensator, Zylinderkondensator usw.
Für den idealen Plattenkondensator läßt sich die Kapazität aus der
Beziehung zwischen U und Q berechnen
Q A⋅ε
Q⋅d
U = ------------- → ---- = ------------0U
A ⋅ ε0
d
also
A ⋅ ε0
C ≈ ------------d
Diese Beziehung ist nicht exakt, weil bei realen Kondensatoren mit
endlich großen Platten Streufelder am Rand entstehen.
5.6.2 Schaltungen mit Kondensatoren
Parallelschaltung
+
U
C1
C2
C3
Ci
Für alle Teilkapazitäten ist Q i = C i ⋅ U i , wobei U i = U gleich
Q ges =
∑ Ci ⋅ U i
i
= U ⋅ ∑ C i = U ⋅ C ges
i
mit
C ges =
∑ C i Gesamtkapazität bei Parallelschaltung
i
Seite 96
GET-Skript
Bei Parallelschaltung addieren sich die Kapazitäten der einzelnen
Kondensatoren.
Reihenschaltung
+
C1
C2
C3
Ci
U
Für alle Teilkapazitäten ist U i = Q ⁄ C i , wobei Q i = Q gleich
U =
∑Ui
=
i
∑ Q ⁄ Ci
i
1
1
= Q ⋅ ∑ ----- = Q ⋅ ---------C ges
Ci
i
mit
1
---------- =
C ges
- Gesamtkapazität bei Reihenschaltung
∑ ---Ci
1
i
Bei Reihenschaltung von Kondensatoren addieren sich die Kehrwerte der Kapazitäten der einzelnen Kondensatoren zum Kehrwert
der Gesamtkapazität.
5.7 Influenz und Verschiebungsdichte D
Die Verschiebung von Ladungen in elektrisch leitfähigen Körpern,
die sich in einem elektrischen Feld befinden, nennt man Influenz.
Beispiel 1:
Metallstab
+
-
+
Negative Ladungen im Stab werden zur positiven Punktladung gezogen, am anderen Ende bleiben positive Ladungen zurück.
Es entsteht Kraftwirkung auf dem Leiter, weil E der Punktladung
2
am positiven und negativen Ende verschieden ( E ∼ 1 ⁄ r ).
Elektrostatik
Seite 97
Beispiel 2:
++++++++++++++++++
------+++++++
a)
-----------------
elektrische
„Löffel“
mit Fläche A
⊥ zu E
im Feld
trennen
++++++++++++++++++
------+++++++
b)
herausziehen und
Ladung messen
----------------Die zwischen den sich berührenden Leitern durch Influenz verschobene Ladung Qinfl verbleibt nach dem Trennen auf den „Löffeln“ und kann gemessen werden. Man hat experimentell festgestellt:
Q infl ∼ E
Q infl ∼ A
Q infl = konst ⋅ E ⋅ A
Die Aussage gilt in jedem beliebigen Feld E , wenn Fläche dA hinreichend klein und dA⊥ Feld ist, also
dQ inf l˙ = konst ⋅ E ⋅ dA
Ist dA nicht senkrecht zum Feld, so stellt man fest, daß
dQ infl = konst ⋅ E ⋅ d A = D ⋅ d A
Der neue Vektor D = konst ⋅ E hat die Richtung von E und die
Größe einer Flächenladung. Steht das elektrische Feld senkrecht
zur Löffelfläche, so ist D = dQinfl / dA. D mißt also die Dichte der
durch Influenz verschobenen Ladungen und heißt Verschiebungsdichte oder Erregung.
Die Konstante zwischen D und E ist ε 0 und damit ist
D = ε0 ⋅ E .
Man kann also Felder messen:
- anhand der Kraftwirkung F = Q ⋅ E und definiert damit das
E -Feld, oder
- anhand von Ladungsmessungen dQ = D ⋅ d A mit elektrischen Löffeln und definiert damit das D -Feld.
Seite 98
GET-Skript
Im Vakuum ( ≈ Luft) ist gleichwertig:
°∫A Ed A
= q ⁄ ε 0 und
°∫A Dd A
= q
5.8 Energie im elektrischen Feld
5.8.1 Die Gesamtenergie elektrostatischer Systeme
Ladungsverteilung
qi
rij
qj
Um die Gesamtenergie der Ladungsverteilung zu berechnen,bringt
man zunächst alle Ladungen unendlich weit voneinander weg.
Dann ist wegen ϕ ( ∞ ) = 0 die Gesamtenergie W = 0
Ladung q1 an ihren Platz 1 bringen
ϕ(1) = 0 ; W 1(∞ → 1) = 0
Ladung q2 an ihren Platz 2 bringen
q2 ⋅ q1
W 2 ( ∞ → 2 ) = q 2 ⋅ ϕ 1 ( 2 ) = -----------------4πε 0 r 12
Ähnlich alle weiteren Ladungen an ihre Plätze bringen
q3 ⋅ q1
q3 ⋅ q2
- + -----------------W 3 ( ∞ → 3 ) = q 3 ⋅ ϕ 1 ( 3 ) + q 3 ⋅ ϕ 2 ( 3 ) = -----------------4πε 0 r 13 4πε 0 r 23
Schließlich Ladung j an ihren Platz bringen
W j ( ∞ → j ) = q j ⋅ ϕ 1 ( j ) + q j ⋅ ϕ 2 ( j ) + .....q j ⋅ ϕ j – 1 ( j )
qj ⋅ qj – 1
q j ⋅ q1
q j ⋅ q2
= ------------------ + ------------------ + ..... --------------------------4πε 0 r j j – 1
4πε 0 r 1 j 4πε 0 r 2 j
Gesamtenergie der Ladungsverteilung mit n Ladungen ist also
Summe der Energien aller Paare:
W ges =
qi ⋅ q j
----------------4πε 0 r ij
alle Paare ( i, j )
∑
Elektrostatik
Seite 99
Etwas „mathematischer“:
n
1
W = --- ∑
2
n
qi q j
∑ ----------------4πε 0 r ij
∀i ≠ j
i=1j=1
Faktor 1/2 weil Paare (i, j) und (j, i) doppelt gezählt werden!
Bei kontinuierlicher Ladungsverteilung ρ erhält man entsprechend:
1
W = --2
∫
∫
Raum Raum
ρ(1) ⋅ ρ(2)
--------------------------- dV 1 dV 2
4πε 0 r 12
q
Beispiel: Energie eines Kondensators u = ---C
Zunächst ungeladen: W = 0. Dann Ladung dq von einer Platte auf
die andere (eine wird +, andere -)
q
dW = [ ϕ ( 1 ) – ϕ ( 2 ) ]dq = u ⋅ dq = ---- ⋅ dq und
C
Q
W Kond =
2
q
1
1
2
1Q
---- dq = --- ------ = --- C ⋅ U = --- Q ⋅ U
C
2
2
2C
∫
q=0
5.8.2 Berechnung von Kräften aus der Gesamtenergie
Beispiel: Kraft zwischen den Platten eines Kondensators aus der
Energie W mit dem Prinzip der „virtuellen Verrückung“. Man vergleicht die mechanische Arbeit beim „gedachten (virtuellen) Verrücken“ der Platten um den kleinen Weg dx mit der Änderung der
elektrischen Energie aufgrund der Kapazitätsänderung:
dW mech = F ⋅ dx wobei zur Vereinfachung d x || F
Die Energie W elektr war
2
W elektr
1Q
= --- -----2C
und weil Q sich beim Verschieben nicht ändert, ist
2 ∂ 1
1
dW elektr = --- ⋅ Q ⋅ ------ ---- ⋅ dx
2
∂x C
und aus dWelektr = dWmech folgt
2 ∂ 1
1
F = --- ⋅ Q ⋅ ------ ----
2
∂x C
Das gilt für jede Anordnung von Ladungen. Man muß also zur Be-
Seite 100
GET-Skript
rechnung von F weder die Ladungsverteilung noch das Feld kennen (im Gegensatz zu F = q ⋅ E ).
Beispiel: Plattenkondensator, Fläche A, Abstand x (hier x statt d)
ε0 ⋅ A
∂ 1
1
x
1
C = ------------ oder ---- = ------------- und ------ ---- = ------------- .
∂x
C
x
C
ε0 ⋅ A
ε0 ⋅ A
Damit ist die Kraft
2
2 ∂ 1
1 Q
1
F = --- ⋅ Q ⋅ ------ ---- = --- ⋅ ------------∂x C
2 ε0 ⋅ A
2
Zum Vergleich:
Kraft aus F = Q ⋅ E berechnen. Dabei beachten, daß Ladung Q
der einen Platte nicht im Gesamtfeld, sondern im Feld der anderen
Platte Kraftwirkung erfährt.
2
E Platte
1 Q
σ
Q
= -------- = ---------------- und F = Q ⋅ E Platte = --- ⋅ ------------2 ε0 ⋅ A
2ε 0
2ε 0 ⋅ A
Also: gleiches Ergebnis wie bei Berechnung von F aus der Energie
5.8.3 Das E -Feld als Sitz der elektrostatischen Energie
Wir kennen nun die elektrostatische Energie von diskreten und
kontinuierlichen Ladungsverteilungen, z.B. die Energie eines geladenen Kondensators. Wo sitzt diese Energie?
Man kann zeigen, daß die Energie im elektrischen Feld sitzt. Zur
Erinnerung: elektromagnetische Wellen (Licht, Radiowellen, ...)
sind elektromagnetische Felder und transportieren Energie!
Um dies plausibel zu machen, denken wir uns in ein elektrisches
Feld einen Plattenkondensator mit Fläche dA und mit Abstand dx
so in das E-Feld eingebracht, daß die Platten auf Äquipotentialflächen liegen. Dadurch wird das elektrische Feld nicht beeinflußt.
Die Energie dW im Volumen dV = d A ⋅ d x ist 2dW = dQ ⋅ dU
und mit dQ = ε 0 ⋅ E ⋅ d A und dU = E ⋅ d x wird
1
1
1
dW = --- ⋅ dQ ⋅ dU = --- ⋅ ε 0 ⋅ E ⋅ d A ⋅ E ⋅ d x = --- ⋅ D ⋅ E ⋅ dV
2
2
2
Die Gesamtenergie im Feld ist dann
1
W = --- ⋅ ∫
D ⋅ E ⋅ dV
2 Raum
Eine wirkliche Herleitung dieses Ergebnisses muß zunächst zurückgestellt werden.
Elektrostatik
Seite 101
5.9 Der elektrische Dipol
5.9.1 Kräfte und Drehmomente am elektrischen Dipol
E
F
+
d/2
α
−
–F
Ein Dipol ist eine Art „Hantel“ mit Ladung +q um -q an den Enden. Im E -Feld entsteht ein Kräftepaar ± F und jede der Kräfte liefert einen gleichgroßen Beitrag zum Drehmoment T d mit den Beträgen
d
T + = E ⋅ q ⋅ --- ⋅ sin α und
2
d
d
°
T - = E ⋅ ( – q ) ⋅ --- ⋅ sin ( 180 + α ) = E ⋅ q ⋅ --- ⋅ sin α , insgesamt
2
2
T d = T + + T - = E ⋅ q ⋅ d ⋅ sinα (Betrag des Drehmoments)
Schreibt man den Abstand d als Vektor in Richtung von der negativen zur positiven Ladung und definiert man den Vektor p als
p = q ⋅ d , so bildet dieser mit E den Winkel α . Mit dieser
Schreibweise läßt sich das Drehmoment in Größe und Richtung
darstellen:
T d = p × E mit p × E = p ⋅ E ⋅ sinα = E ⋅ q ⋅ d ⋅ sinα
T d steht senkrecht auf p und E . Weil man mit p das Drehmoment des Dipols berechnen kann, heißt p Dipolmoment.
Seite 102
GET-Skript
5.9.2 Potential und E -Feld des Dipols
z
+q
+
r
r2
P
-q
P
r1
−
Das Potential eines Dipols ergibt sich mithilfe der Superposition :
q
1 1
ϕ D = ϕ 1 + ϕ 2 = ------------ ⋅ ---- – ----
4πε 0 r 1 r 2
Bei Dipolen interessiert häufig E bzw. ϕ bei r » d , also sehr weit
entfernt. (Beispiel: Antennen, atomare Dipole, ...)
z
ϑ
+
−
P
r1
r
r2
Dann sind die Vektoren r 1 bzw. r 2 näherungsweise parallel und
ϑ 1 ≈ ϑ 2 . Die Abstände sind
d
r 1 = r – --- ⋅
2
1 1
---– ---- =
r 1 r 2
d
cos ϑ und r 2 = r + --- ⋅ cos ϑ , also
2
r1 – r2
d ⋅ cos ϑ
d ⋅ cos ϑ
- für r » d
--------------- = --------------------------------------2- ≈ ------------------2
r1 ⋅ r2
2 d
r
r – --- ⋅ cos ϑ
2
In die Formel für das Dipol-Potential eingesetzt ergibt dies
q ⋅ d ⋅ cos ϑ
ϕ D = --------------------------2
4πε 0 ⋅ r
Weil ϑ der Winkel zwischen r ⁄ r und d bzw. p ist, gilt auch
q⋅d⋅r
p⋅r
ϕ D = --------------------3- = --------------------3- Potential des Dipols für r » d
4πε 0 ⋅ r
4πε 0 ⋅ r
Elektrostatik
Seite 103
Das E -Feld ist dann
∂ ∂ ∂
ϕ mit
,
E D = -gradϕ D = – ,
∂ x ∂ y ∂ z D
p 3 cos ϑ – 1
p 3 cos ϑ
- , E ⊥ = ------------ --------------- und E =
E z = ------------ --------------------3
3
4πε 0
4πε
0
r
r
2
Ez + E⊥
2
Anschaulich:
z
E⊥
P
Ez
E
3
E fällt also mit 1 ⁄ r ab.
0
Auf der z-Achse, also bei ϑ = 0 ist
p
3–1
2p
E z = ------------ ⋅ ----------=
-------------------3
4πε 0 r 3
4πε 0 ⋅ r
0
In der Äquatorebene, also bei ϑ = 90 ist
p
E z = – --------------------3- , also entgegengesetzt halb so groß.
4πε 0 ⋅ r
5.10 Materie im elektrischen Feld
5.10.1 Dielektrika
Dielektrika sind Isolatoren, also Ladungen (im Gegensatz zu Leitern!) nicht frei beweglich .
Versuch von Faraday:
Bringt man in einen aufgeladenen Kondensator einen Isolator, so
fällt die Spannung U um den Faktor 1 ⁄ ε r , obwohl Q gleich bleibt.
Die Kapazität C = Q/U vergrößert sich also um den Faktor ε r . Der
Faktor ε r hängt nur vom Dielektrikum ab und heißt relative Dielektrizitätskonstante.
Seite 104
GET-Skript
.
+
Dielektrikum
Luft (Vakuum)
Kapazität C
Mit U wird auch
2
∫1 E ds
+
Kapazität εrC
-
= U kleiner, also E kleiner.
σ
E ⊥ = ----- ergab sich aber direkt aus dem Grundgesetz Gl (1).
ε0
Also muß auch σ kleiner geworden sein. Da σ frei = Q frei ⁄ A ,
also die freie Ladung auf den Platten, gleich bleibt ist die einzig
mögliche Folgerung:
Es gibt Oberflächenladung σ Diel˙ auf dem Dielektrikum.
- σ frei hat entgegengesetzte Polarität von σ Diel˙
- σ frei > σ Diel˙ weil Feld nicht verschwindet, nur kleiner wird.
----------------+ + + + + +
Dielektrikum
- - - - - ++++++++++++++++++
σfrei
σDielektrikum
σfrei
Integriert man nun wieder über alle Ladungen in einem Kasten
(vgl. 5.2.3), so ist jetzt σ frei und σ Diel eingeschlossen und es ist
σ frei + σ Diel
E ⊥ = ----------------------------- = E frei + E Diel
ε0
und E ⊥ ist tatsächlich kleiner geworden
Beachte: Bei einem Leiter anstelle des Dielektrums wäre
σ Leiter = -σ frei (Platte) und E ⊥ = ( σ Platte + σ Leiter ) ⁄ ε o = 0 ,
d.h. das Innere des Leiters ist feldfrei.
Warum treten diese Oberflächenladungen ohne bewegliche Ladung im Dielektrikum auf?
Elektrostatik
Seite 105
5.10.2 Die Polarisation
In gewissen Grenzen ist die negative Atomhülle gegen den positiven Atomkern elastisch verschiebbar. Im Feld bekommt das Atom,
dessen Hüllenschwerpunkt mit Ladung - q sich um s gegen den
Kern mit Ladung + q verschiebt, ein Dipolmoment p = q ⋅ s .
- - - - - - - - - - - +- - - - - - - - - - - - - - - - - -
E
- - - - - - - - s -- -- -- +-- -- -- -- - - - - - - - -
+ p
-
Bei N Atomen im Volumen V ergibt sich eine Atomdichte n = N/
V und ein Dipolmoment/Volumen P = n ⋅ q ⋅ s , das Polarisation
genannt wird
Damit läßt sich nun die Entstehung der Oberflächenladungen des
Dielektrikums im E-Feld erklären.
E frei
s
+ + + + + +
P
E pol
- - - - - Oberfläche A
- Alle negativen Ladungen rücken um nach s unten.
- Alle positiven Ladungen bleiben am Platz.
Im Inneren keine Nettoladung durch P . Auf den Oberflächen Ladungsdichte σ Diel
Man nennt σ Diel = σ Polarisation die Polarisationsladungen.
In der Oberflächenschicht mit Volumen s ⋅ A ist Gesamtladung
Q pol = ( n ⋅ q ) ⋅ ( s ⋅ A ) = ( n ⋅ q ⋅ s ) ⋅ A ,
wobei ( n ⋅ q ) = ( N ⋅ q ) ⁄ V = ( Q pol ⁄ V ) = Ladungsdichte
( s ⋅ A ) = V = V olumen
und ( n ⋅ q ⋅ s ) = P = Polarisation
Damit läßt sich nun zunächst der Betrag der Polarisation P berechnen; denn aus σ pol = Q pol ⁄ A
erhält man P = n ⋅ q ⋅ s = σ pol
Seite 106
GET-Skript
Die Richtung von P ist der von E Diel bzw. E pol entgegengesetzt
weil P zu den positiven Ladungen hin, E von den positiven Ladungen weg läuft. Damit darf man für das E -Feld mit Dielektrikum schreiben:
σ frei + σ pol
σ frei – P
E = --------------------------- = E frei + E pol = -------------------ε0
ε0
Die Verschiebung der negativen Ladung um s wird in gewissen
Grenzen proportional zu E sein und damit auch die Polarisation
P = N ⋅ q ⋅ s ∼ E , d. h. man setzt
P = χ ⋅ ε0 ⋅ E
und nennt χ die elektrische Suszeptibilität des Dielektrikums. Damit erhält man eine neue Schreibweise für E, nämlich
σ frei – χ ⋅ ε 0 ⋅ E
σ frei
σ frei
E = -------------------------------------= ---------- – χ ⋅ E oder E ⋅ ( 1 + χ ) = ---------ε0
ε0
ε0
und nach E aufgelöst
σ frei
1
E = ----------- ⋅ ----------------ε0 ( 1 + χ )
Häufig benutzt man die relative Dielektrizitätskonstante
ε r = 1 + χ und schreibt damit
σ frei 1
1
E = ----------- ⋅ ---- = E frei ⋅ ---ε0 εr
εr
Dies ist der Faktor ε r um den sich U beim Einbringen des Dielektrikums ins Feld geändert hatte.
5.10.3 E -Feld und Verschiebungsdichte D im Dielektrikum
Es wurde in 5.7 die Verschiebungsdichte D definiert und das
Grundgesetz Gl(1) lautete dann
°A∫ Dd A
= q
Zu diesem Zeitpunkt waren alle Betrachtungen ohne Dielektrika
angestellt worden, sodaß eine Unterscheidung zwischen freien Ladungen und Polarisationsladungen keine Rolle spielte. Deshalb
muß hier erwähnt werden, daß D definitionsgemäß nur von freien Ladungen ausgeht, daß also
Elektrostatik
°A∫ Dd A
Seite 107
= q frei
Definition von D !
Diese Definition ist zwar nicht einleuchtend, weil auch Polarisationsladungen Kräfte ausüben. Sie erspart aber die ständige Kennzeichnung der Ladungen durch die Indizes frei bzw. Polarisation.
Mit dieser Festlegung erhält man für das Feld des Plattenkondensators
D = σ frei oder D = σ frei ⋅ n
σ frei – P
Dann schreibt sich E = -------------------- bzw. ε 0 ⋅ E + P = σ frei
ε0
auch als
D = ε 0 ⋅ E + P bzw. D = ε 0 ⋅ E + P
oder mit χ bzw. ε = ε 0 ⋅ ε r
D = ε0 ⋅ E + χ ⋅ ε0 ⋅ E = ( 1 + χ ) ⋅ ε0 ⋅ E = ε0 ⋅ εr ⋅ E = ε ⋅ E
Diese Darstellung ist in der Elektrotechnik üblich, denn man kann
ohne Verständnis des „Inneren“ im Dielektrikum , also ohne die
Polarisationsmechanismen zu kennen,
- aus σ frei die Verschiebungsdichte D = σ frei ⋅ n bestimmen
( σ frei , die Ladung auf Platten ist ja unabhängig vom Dielektrikum bekannt)
- und aus D dann mit den Materialkonstanten χ oder ε r oder ε :
das E -Feld finden.
Auch die „Grundgesetze“ der Elektrostatik werden in der Elektrotechnik deshalb praktisch immer unter Benutzung von D wie folgt
formuliert:
(1)
°∫A D d A
(2‘)
°∫Γ Eds
= q frei und
= 0,
In dieser Schreibweise braucht man zur Lösung aber noch die Beziehung zwischen D und E
D = ( 1 + χ ) ⋅ ε 0 ⋅ E sog. Materialgleichung
Seite 108
GET-Skript
Dieser Versuch, die Eigenschaften der Materie durch χ zu beschreiben ist für die Praxis sehr nützlich. Allerdings ist χ nur näherungsweise konstant und bei anisotropen Materialien ein Tensor,
der die dann unterschiedliche Richtung zwischen D und E beschreibt.
5.10.4 Felder an Grenzflächen von Dielektrika
Durch die Polarisationsladungen an den Oberflächen von Dielektrika wird im Dielektrikum ein zusätzliches E -Feld erzeugt. Damit
ändert sich das gesamte E -Feld an den Grenzen von Dielektrika
sprunghaft.
Bisher galt stets die Einschränkung:
- E steht senkrecht auf dem Dielektrikum und
- außerhalb des Dielektrikums ist Luft (Vakuum)
Jetzt gilt:
- E verläuft im beliebigen Winkel zur Oberfläche des Dielektrikums und
- Grenzflächen zwischen Dielektrika mit unterschiedlichen Dielektrizitätskonstanten ε r1 und ε r2 werden betrachtet
Auch hier gilt:
ε r1
ε r2
3
Et E
2
En
d
Γ
1
4
h→0
°∫Γ Eds = 0
=
=
2
3
4
1
∫1
E ds + ∫ E ds + ∫ E ds + ∫ E ds
2
4
2
3
3
4
1
∫ E t1 ds + ∫ E n ds + ∫ E t2 ds + ∫ E n ds
1
2
3
4
= E t1 ⋅ d – E t2 ⋅ d = 0
oder E t1 = E t2
Tangentialkomponenten von E sind stetig.
Elektrostatik
Seite 109
ε r1
ε r2
A
Dn1
Dn2
Weiter gilt: Weil auf Oberfläche der Dielektrika keine freien Ladungen, ist
∫ Dd A
°
Kasten
∫ Dd A
°
Kasten
= q frei = 0
=
∫
∫
D1 d A +
Deckel A
D2 d A +
Deckel A
∫
DdA = 0
Seiten
und weil bei Höhe des Kastens → 0 das Integral über die Seitenfläche → 0 geht, bleibt
–
∫
∫
D n1 ⋅ dA +
Deckel A
oder D n1 = D n2
D n2 ⋅ dA = – D n1 ⋅ A + D n2 ⋅ A = 0
Deckel A
Normalkomponenten von D sind stetig
und
D n1 = ε r1 ⋅ ε 0 ⋅ E n1 ; D n2 = ε r2 ⋅ ε 0 ⋅ E n2
Damit läßt sich ein „Brechungsgesetz“ für die E -Feldlinien bestimmen.
ε r1
ε r2
E t2
E t1
α1
E1
E n1
E2
α2
E n2
Seite 110
GET-Skript
E t1
E t1 ⋅ ε r1 ⋅ ε 0
tan α 1 = -------= ---------------------------D n1
E n1
E t1 ⋅ ε r2 ⋅ ε
E t2
E t2 ⋅ ε r2 ⋅ ε 0
tan α 2 = -------= ---------------------------- = ----------------------------0D n2
E n2
D n1
und zusammengefaßt
tan α
ε r1
-------------1- = -----tan α 2
ε r2
Brechungsgesetz der elektrischen Feldlinien
Magnetostatik
6
Seite 111
Magnetostatik
6.1 Vereinfachung der Grundgesetze für die Magnetostatik
Was heißt „Magneto-statik“?
„Magneto-“: Wir wollen uns nur mit magnetischen Feldern, den
darin auftretenden Kräften und deren Wirkungen beschäftigen,
nicht mit elektrischen Feldern und Kräften.
„statik“: Wir wollen uns nicht mit zeitlich veränderlichen magnetischen Feldern befassen.
Nur magnetische Felder heißt: E = 0 und ∂E ⁄ ∂t = 0 , dann wird
aus (4)
1
(4) ----- ∫ Bds =
µ 0°Γ
∂
∫ S + ε0 ∂ t E d A
die Gl. (4‘)
A
1
(4‘) ----- ∫ Bds =
µ 0°Γ
∫ S dA
A
Ähnlich wird aus (5)
(5) F = q ( E + v × B ) die Gl. (5‘‘)
(5‘‘) F = q ⋅ v × B
Die Gl. (1) beschreibt nur E und entfällt.
Nur statische Felder heißt ∂B ⁄ ∂t = 0 , so daß Gl. (2) entfällt. Es
gelten also die
Gesetze der Magnetostatik
(3)
°A∫ B d A
= 0
1
(4‘) ----- ∫ Bds =
µ 0°Γ
∫ S dA
A
(5‘‘) F = q ⋅ v × B
Seite 112
GET-Skript
Bitte keine Analogien zwischen E und B (manche Lehrbücher!!).
Merke: B -Feld hat Zirkulation, aber keine Quellen (keine magnetische Ladung!), E -Feld (statisch) hat Quellen, aber keine Zirkulation.
Also auch bei Magnetostatik enorme Vereinfachung.
Es gibt eine Reihe von elektrotechnischen Aufgaben, die mit diesen vereinfachten Gleichungen gelöst werden können. Es lassen
sich dann wieder vereinfachte Formeln herleiten, die dann aber nur
für magnetostatische Probleme gelten.
Bemerkung. Ein elektrostatisches E -Feld setzte voraus, daß die
Quellen des E -Feldes (Ladungen) sich nicht bewegen.
Ein magnetostatisches Feld, das nach Gl. (4‘) von der Stromdichte
S erzeugt wird, setzt voraus, daß sich S nicht ändert. Das ist z. B.
immer der Fall, wenn sich Ladungen als konstante Ströme in Leitern bewegen.
6.2 Die Lorentz-Kraft
6.2.1 Regeln für den Umgang mit äußeren Vektorprodukten
(Kreuzprodukten)
Die Schreibweise F = q ⋅ v × B besagt:
Die Kraft ist F ist an jedem Ort
-
senkrecht zur Geschwindigkeit v
senkrecht zur Feldstärke B
proportional zum Betrag der Geschwindigkeit v
proportional zum Betrag des Feldes B
und proportional zum sin ϑ des Winkels ϑ zwischen v und B .
Dieses Richtungsverhalten läßt sich durch das „äußere Produkt“,
das „Kreuzprodukt“ zwischen v und B vollständig beschreiben.
v × B = v ⋅ B ⋅ sin ϑ ⋅ e ⊥ = v ⋅ B ⋅ sin ϑ ⋅ e ⊥
e ⊥ steht ⊥B und ⊥v
e ⊥ geht in Richtung einer Rechtsschraube, wenn man v auf
kürzestem Weg in B „hineindreht“. Das Ergebnis ist ein Vektor.
Magnetostatik
Seite 113
Bildlich:
B
B
v
Rechtsgewinde
v
e⊥
e⊥
Achtung! v × B = – B × v
Zum Vergleich: Inneres Produkt oder skalares Produkt, z. B.
E ⋅ ds = E ⋅ ds ⋅ cos ϑ = ds ⋅ E Ergebnis ist Zahl, Skalar.
Beispiel: Lorentzkraft auf Elektronenstrahl im Magnetfeld.
F
-e
−
B
ϑ
v
e⊥
Auf ein Elektron der Ladung q = - e wirkt dann die Kraft
F = ( – e ) ⋅ v × B = ( – e ) ⋅ v ⋅ B ⋅ sin ϑ ⋅ e ⊥
Das Magnetfeld B (magnetische Induktion) wurde anhand seiner
Kraftwirkung auf bewegte Ladungen definiert mit F = q ⋅ υ × B .
So ergibt sich die Einheit von B als
VAs 1
N
N
Vs
[ B ] = --------------------- = -------- = ---------- ⋅ -------- = ------2
m Am
As ⋅ m ⁄ s
Am
m
Wegen der Wichtigkeit in der Elektrotechnik hat die zusammengesetzte Einheit [ B ] auch den Namen 1 Tesla (früher 104 Gauß) erhalten.
Vs
4
4
[ B ] = 1 ------2 = 1Tesla = 1T = 10 Gauss = 10 G
m
(Erdfeld ≈ 1 Gauß, el. Maschinen
≈ 1 T)
Seite 114
GET-Skript
6.2.2 Kraft auf stromdurchflossende Leiter
Darstellung der Lorentzkraft im stromdurchflossenen Leiter mit
der Stromdichte S
Beispiel: Elektronenleitung
F
B
−
v
I
A
−
−
I
B
dl
Auf jedes Elektron mit Ladung q = -e wirkt F e = – e ⋅ v × B
Wir nehmen zunächst an, daß alle Elektronen gleiche Geschwindigkeit v in Größe und Richtung haben.
Im Volumenelement dV = A ⋅ dl sind n Elektronen, also wirkt
auf dV die Gesamtkraft dF mit
n ⋅ ( –e )
dF = n ⋅ F e = n ⋅ ( – e ) ⋅ v × B = dV ⋅ ------------------ ⋅ v × B
dV
n ⋅ ( –e )
oder weil ------------------ = ρ die Ladungsdichte ist, gilt
dV
dF = dV ⋅ ρ ⋅ v × B und mit S = ρ ⋅ v
dF = dV ⋅ S × B Lorentz-Kraft auf dV bei Stromdichte S
Da S unabhängig von Polarität der Ladungsträger definiert ist, gilt
dies auch für positive Ladung. Da S unabhängig von der Geschwindigkeitsverteilung der Ladungsträger ist, kann die obige
Einschränkung entfallen.
Darstellung Lorentz-Kraft auf einen Leiter durch Strom I.
Wir beschreiben die Länge dl des Leiter-Stücks als Vektor dl in
Richtung S , dann wird
dV ⋅ S = dl ⋅ A ⋅ S = dl ⋅ I
und
dF = I ⋅ dl × B Lorentzkraft auf Leiterlänge dl bei Strom I
Magnetostatik
Seite 115
Oft interessiert man sich (z. B. bei Maschinen) für die Kraft/Leiterlänge, den „Kraftbelag“ dF ⁄ dl und erhält
dl
dF ⁄ dl = I ⋅ ----- × B Kraftbelag
dl
Zur Berechnung der Gesamtkraft F muß die Kraft dF pro Leiterlänge dl über den gesamten Leiter aufintegriert werdne.
Beispiel: Gerades Leiterstück, Länge l , B homogen über l .
F =
l
∫0
dF =
l
∫0 I ⋅ d l × B
Weil B homogen ist, hat B an jeder Stelle von l gleiche Größe und
gleiche Richtung. Weil der Draht gerade ist, hat dl auf der ganzen
Länge die gleiche Richtung, also ist auch der Winkel ϑ zwischen
dl und B überall gleich, d. h. sin ϑ = const. Dann gilt Spezialfall 1:
F =
l
∫0 I ⋅ B ⋅ sin ϑ ⋅ e⊥ ⋅ dl
F = I ⋅ l ⋅ B ⋅ sin ϑ
F = I⋅l×B
= I ⋅ B ⋅ sin ϑ ⋅ e ⊥ ⋅ l oder
Kraft auf geraden Leiter l
6.2.3 Drehmoment auf stromdurchflossenen Schleifen im homogenen Feld B
Beispiel: Rechteckige Leiterschleife, B homogen
l1
A
B
α
I
I
l4
l2
l3
l2/2
α
F1
l2
F3
A
B
l 2 und l 4 sind bis auf das Vorzeichen gleich, ebenso l 1 und l 3 ,
also
l 1 = – I 3 und l 2 = – I 4 , also auch
F 1 = I ⋅ l1 × B = –I ⋅ l3 × B = –F 3
Seite 116
GET-Skript
F 2 = I ⋅ l2 × B = –I ⋅ l4 × B = –F 4
Es gibt also keine resultierende Gesamtkraft, die die Leiterschleife
verschiebt. Aber:
F 1 = – F 3 bilden ein Kräftepaar, also Drehmoment T
l2
T 1 = ---- ⋅ F 1 ⋅ sin α = T 3 ; T = T 1 + T 3 .
2
Nun ist bei l 1 ⊥B
F 1 = I ⋅ l 1 ⋅ B ⋅ sin 90° = I ⋅ l 1 ⋅ B und
T = l 2 ⋅ l 1 ⋅ I ⋅ B ⋅ sin α = A ⋅ I ⋅ B ⋅ sin α bzw.
T = I⋅A×B
A ist der bekannte Flächenvektor. Wir vereinbaren dabei die Richtung von A in Bewegungsrichtung der Schraube, wenn I in Drehrichtung fließt.
Rechtsschraube
I
A
I
A
Auf eine Spule mit N Windungen wirkt das N-fache Moment, also
m
T = N⋅I⋅A×B = m×B
m ist die von der Spule abhängige Proportionalitätskonstante zwischen Drehmoment T und B . Diese Konstante heißt das Magnetische Moment einer Spule (auch magnetisches Dipolmoment).
Magnetostatik
Seite 117
6.3 Berechnung von B -Feldern
6.3.1 Es gibt keine magnetischen Ladungen
Wie in Elektrostatik gibt es auch in der Magnetostatik zwei „Feldgleichungen“ (3), (4‘)
Gl. (3)
°A∫ B d A
= 0
besagt: Es gibt keine magnetischen Ladungen
Bildlich: Die Feldlinien von B können nirgends beginnen und nirgends enden. Im allgemeinen schließen sich die Feldlinien von B
in sich selbst.
Bei Feldberechnungen muß mit ∫ A B d A = 0 die „Form“ von B
°
überprüft werden, ob wirklich keine Quellen vorhanden sind.
Das entspricht der Überprüfung elektrostatischer Felder mit
∫ Eds = 0 auf Zirkulationsfreiheit der „Feldform“.
°Γ
Achtung:
∫ B d A = 0 gilt immer,
°A
°Γ∫ Eds
= 0 nur in Elektrostatik
6.3.2 Durchflutungsgesetz, Ampere‘sches Gesetz
In der Magnetostatik ergibt sich die Größe des B-Feldes (Induktion) aus
1
----- ∫ Bds =
µ0°
Γ
∫ S dA
A
In Worten: Fließt durch eine Fläche A mit dem Rand Γ ein Strom
der Stromdichte S , so ist der gesamte Strom durch diese Fläche
∫A S d A gleich dem Linienintegral über B ⁄ µ0 längs dem Rand Γ
der stromdurchflossenen Fläche. Die Richtung von B muß festgelegt werden.
A
B
S
Rechtsschraube
Seite 118
GET-Skript
Man legt fest: Fließt der Strom S in Bewegungsrichtung einer
Rechtsschraube, so verläuft B in Drehrichtung.
Da ∫ S d A in fast allen elektrotechnischen Problemen durch StröA
me in Leitung entsteht, schreibt man auch oft
1
----- ∫ Bds = I ges Ampere‘sches Gesetz
µ0°
Γ
In dieser Schreibweise muß man daran denken, daß Iges bei mehreren Windungen das n-fache des in der Leitung fließenden Stromes sein kann, wenn der Draht in n Windungen durch die von Γ
umrandete Fläche fließt! Die Bezeichnung Durchflutung Θ für
den Gesamtstrom durch A vermeidet diese Schwierigkeiten: als
Durchflutung Θ bezeichnet man
Θ =
∫A S d A
= I gesamt durch
A
Wenn nun ein Draht mit Strom I mehrfach in gleicher Richtung
durch A läuft, z. B. n-mal, dann ist Θ = n ⋅ I und
1
----- ∫ Bds = Θ
µ0°
Durchflutungssatz
Γ
6.3.3 Berechnung symmetrischer Felder aus dem Durchflutungsgesetz
Beispiel: B -Feld eines langen, geraden Leiters
B ( r, ϕ, z )
I
r
ϕ
I
Hier: Berechnung in Zylinderkoordinaten vorteilhaft
Magnetostatik
Seite 119
Am betrachteten Punkt (r,ϕ, z) hat B eine radiale Komponente
B r = B r (r,ϕ, z) sowie die beiden tangentialen Komponenten
B z = B z (r,ϕ, z) und B ϕ = B ϕ (r,ϕ, z) , wobei B r ⊥B z ⊥B ϕ .
B wird also beschrieben durch den Vektor
B r (r,ϕ, z)
B (r,ϕ, z) = B ϕ (r,ϕ, z)
B z (r,ϕ, z)
Wegen ∫ Bd A = 0 ist B r (r,ϕ, z) = 0
°A
Die magnetischen Feldlinien können also nur um den Leiter herum
geschlossen sein und müssen aus Symmetriegründen kreisförmig
verlaufen. Es bleibt nur die tangentiale Komponente B ϕ (r,ϕ, z)
und somit wird
B (r,ϕ, z) = ( 0, B ϕ (r,ϕ, z), 0 ) .
Aus den genannten Symmetriegründen hängt die tangentiale Komponente nur vom Abstand r, nicht aber von z oder ϕ ab, also
B (r,ϕ, z) = ( 0, B ϕ ( r ), 0 ) = B ϕ ( r ) ⋅ e ϕ .
wobei e ϕ ein Einheitsvektor in tangentialer Richtung ist.
Für dieses B-Feld läßt sich aber die Gl (4‘) auswerten, weil ds die
Richtung e ϕ hat, also e ϕ ⋅ ds = ds ist (Spezialfall)
1
----µ0
°∫ Bds
Kreis
1
= ----µ0
°∫ Bϕ ( r ) ⋅ eϕ ⋅ ds
Kreis
1
= -----B ϕ ( r ) ⋅
µ0
1
= -----B ϕ ( r ) ⋅ 2πr = I
µ0
°∫
ds
Kreis
also
µ0 ⋅ I
B ϕ ( r ) = ----------- Feld eines geraden Leiters
2πr
Mit der Schreibweise des Kreuzproduktes kann man B in Größe
und Richtung beschreiben. Mit
r
z
e r = - ; e z = - ist dann
r
z
µ0 ⋅ I ez × er
µ0 ⋅ I ez × r
B = ------------ ⋅ --------------- oder B = ------------ ⋅ -----------2
2π
r
2π
r
Seite 120
GET-Skript
I
r
B
Beispiel: Kraft zwischen zwei parallellen geraden Leitern (Länge
l, Abstand r.
B2
B1
r 12
F1
I1
r 21
F2
I2
Es gilt
F 1 = I 1 ⋅ l1 × B2
F 2 = I 2 ⋅ l2 × B1
Weil bei parallelen Drähten B 2 ⊥ l 1 bzw. B 1 ⊥ l 2 , wird aus
Kreuzprodukt einfaches Produkt. Weiterhin sei r 12 = r 21 = r
Es ist Richtung F 1 || r 12 , Richtung F 2 || r 21
und die Größe der Kräfte
F 1 = I 1 ⋅ l ⋅ B2
I1 ⋅ I2
µ0
- ⋅ l ⋅ ------------- = F
= ----2π
r
F 2 = I 2 ⋅ l ⋅ B1
Mit dieser Beziehung läßt sich die Stromstärke (1A) bzw. Ladung
(1As) festlegen:
1 Ampere ist die Stärke eines Stromes, der durch zwei im Vakuum
parallel im Abstand 1 m voneinander angeordnete, geradlinige,
unendlich lange Leiter von vernachlässigbar kleinem Querschitt
–7
fließend je Meter Länge die Kraft von 2 ⋅ 10 N hervorruft.
Magnetostatik
Seite 121
Die Permeabilitätskonstante (Permeabilität) µ 0 wurde damit festgesetzt zu
–7
2 ⋅ 10 N 2π ⋅ 1m
2πr
- = ----------------------- ⋅ -----------------µ 0 = ( F ⁄ l ) ⋅ -------2
2
1m
1A
I
µ 0 = 4π ⋅ 10
–7
N
– 7 Tm
⋅ -----2- = 4π ⋅ 10 ⋅ -------A
A
Beispiel: Berechnung B -Feld einer langen, zylindrischen Spule
(Solenoid).
d
c
l
a
b Γ
Für eine rechteckige Schleife Γ = a,b,c,d die auf der Länge l = a,b
N Leiter umschließt, gilt das Durchflutungsgesetz:
1
Θ = ----- ∫ B ds
µ 0°Γ
mit Θ = I ⋅ N = Strom mal Windungen durch Rand Γ .
1 b
1 a
1 c
1 d
Θ = ----- ∫ B ds + ----- ∫ B ds + ----- ∫ B ds + ----- ∫ B ds
µ0 a
µ0 b
µ0 c
µ0 d
Es ist
c
∫b B ds
=
a
∫d B ds
= 0,
weil B dort ⊥ds . Weiter ist
d
∫c B ds
= 0,
weil außerhalb der Spule B = 0 ist (Beweis hier nicht möglich).
Der einzige Beitrag kommt von B im Inneren der Spule, und dieses B ist parallel zur Spulenachse und konstant bei Verschiebung
des Rechteckes Γ längs der Spule. Dann ist
B b
1 b
B⋅l
Θ = ----- ∫ B ds = ----- ∫ ds = --------- ,also I ⋅ N = B ⋅ l ⁄ µ 0 oder
µ0 a
µ0 a
µ0
B = µ 0 ⋅ I ⋅ N ⁄ l B-Feld eines Solenoids
Mit n = N ⁄ l schreibt man oft auch
B = µ0 ⋅ I ⋅ n
Seite 122
GET-Skript
6.3.4 Berechnung beliebiger Magnetfelder mit bekannter
Stromverteilung (Biot-Savart‘sches Gesetz)
Das elektrostatische Feld E einer bekannten Ladungsverteilung
konnte man sich als Superposition der E -Felder von allen Punktladungen vorstellen, aus denen die Ladungsverteilung aufgebaut
ist.
Ähnlich kann man das statische Magnetfeld sich als Superposition
der B -Felder von allen Stromelementen vorstellen, aus den die
Stromverteilung aufgebaut ist. Dies ist jedoch mit den z.Z. verfügbaren Werkzeugen nicht herleitbar. Deshalb soll nur das Ergebnis
gezeigt werden:
Ein Element eines beliebigen Leiters mit Länge ∆l i erzeugt bei
Strom I am Ort (1) einen Beitrag
∆l i × r 1i
I
B i ( 1 ) = ------ ⋅ µ 0 ⋅ ------------------3
4π
r
1i
I
∆l i
Bi ( 1 )
r 1i
(1)
der gesamte Leiter also ein Feld
B(1) =
µ 0 ⋅ I ∆l i × r 1i
⋅ ------------------∑ -----------3
4π
r 1i
i
und im Grenzfall unendlich kurzer Elemente dl
µ 0 ⋅ I dl 2 × r 12
B ( 1 ) = ------------ ∫ -------------------- Biot-Savart‘sches Gesetz
3
4π
r
12
I
(2)
∆l 2
dB ( 1 )
r 12
(1)
Magnetostatik
Seite 123
6.4 Materie im magnetischen Feld
6.4.1 Magnetische Werkstoffe und deren Eigenschaften
Beobachtung: Bringt man in eine vom Strom I durchflossene Spule Materialien, so ändert sich B , obwohl die Spule (N/L, also Windungszahl /Länge) und der Strom (I) unverändert sind
Entweder: Durchflutungssatz und die daraus berechnete Beziehung B = µ 0 ⋅ I ⋅ N ⁄ l ist falsch
Oder: Es fließen zusätzlich zum Strom ISpule weitere Ströme im
Material und damit durch den Integrationsweg Γ .
Γ
zusätzl.
Ströme
I
I
B
B
IM
Die zusätzlichen Ströme IMaterial können in der gleichen Richtung
wie I fließen und dabei B vergrößern und zwar
- kaum merklich (Paramagnetismus)
- extrem stark (Ferromagnetismus).
Die zusätzlichen Ströme können auch zu ISpule entgegengesetzt
fließen und B
- kaum spürbar schwächen (Diamagnetismus).
Damit ergibt sich ein B -Feld
B = µ 0 ( I Spule + I Material ) ⋅ N ⁄ l
Seite 124
GET-Skript
6.4.2 Der Magnetisierungsvektor M
In 5.10.2 hatten wir gesehen, daß im Dielektrikum durch atomare
Dipolmomente eine zusätzliche Oberflächenladung entstanden
war.
Ähnlich entstehen bei Materialien im Magnetfeld durch atomare
magnetische Momente zusätzliche Oberflächenströme.
Wir denken uns die atomaren magnetischen Momente m als rechteckige Stromschleifen mit Strom IMaterial und Fläche A M , die in
Richtung des Moments m den Abstand d haben.
AM
m
IM
d
Alle Ströme zwischen solchen Würfeln heben sich auf. Bei einer
aus Würfeln zusammengesetzten Scheibe der Dicke d und Fläche
A bleibt ein Strom I M nur längs des Randes von A .
A
IM
d
Ein Stück Material mit Länge l , also N Scheiben der Dicke d entspricht der Spule mit N Windungen pro Länge l mit dem Strom
IMaterial.
Magnetostatik
Seite 125
l
A
IM
d
Das von den magnetischen Momenten erzeugte B -Feld ist (siehe
Spule)
B zusaetzlich = µ 0 I Material ⋅ N ⁄ l
Bei N Scheiben hat man N ⋅ A ⁄ A M Momente, also im Volumen
l ⋅ A eine Anzahl Momente/Volumen = N M :
N⋅A
N
N M = ---------------------- = ------------AM ⋅ l ⋅ A
Am ⋅ l
Bezeichnen wir als Magnetisierung M das Magnetische Moment
pro Volumen, also
M = N M ⋅ m , so ist M auch
I Material ⋅ N A M
N ⋅ I Material ⋅ A M
N⋅m
- = ----------------------------- ⋅ -------M = -------------- = ----------------------------------------AM
l
AM ⋅ l
AM ⋅ l
M ist also ein Vektor mit der Größe M = I Material ⋅ N ⁄ l und der
Richtung A M .
Das oben berechnete B zusaetzlich = µ 0 I Material ⋅ N ⁄ l läuft ebenfalls in Richtung A und so ist
B zusaetzl. = µ 0 ⋅ M
Das gesamte B -Feld mit Materie ist dann
B = B Spule + B zusaetzl. = B Spule + µ 0 ⋅ M
In gewissen Grenzen wird M zum B -Feld der Spule proportional
sein (wie im Dielektrikum P ∼ E war), also
M ≈ χ ⋅ B Spule ⁄ µ 0
Seite 126
GET-Skript
Unter dieser Voraussetzung ist
B = B Spule + µ 0 ⋅ M = B Spule ( 1 + χ )
Setzt man 1 + χ = µ r , so ist
B = B Spule ⋅ µ r
Die magnetische Suszeptibilität χ bzw. die relative Permeabilität
µ r drücken Materialeigenschaften aus und sind im allgemeinen
nicht konstant. Entsprechend der Einteilung in 6.4.1 gilt:
- Diamagnetische Stoffe: µ r = ( 1 + χ ) ≤ 1
- Paramagnetische Stoffe: µ r = ( 1 + χ ) ≥ 1
- Ferromagnetische Stoffe: µ r = ( 1 + χ ) » 1
6.4.3 Magnetische Induktion B und Magnetfeld H in Materie
Entsprechend der „Erregung“ magnetischer Felder durch Ströme
wird häufig das „Magnetische Feld“, die „Magnetische Erregung“
(ohne Proportionalitätskonstante µ 0 zwischen Strom und Magnetfeld) durch den Vektor H beschrieben.
°∫Γ H ds
= Θ
Mit H werden folgende weitere Begriffe eingeführt:
2
∫ H ds
= V m = magnetischeSpannung
1
°∫Γ H ds
°
= V m = magnetischeRandspannung
°
Achtung: Bei der Fesatlegung von H , V m bzw. V m wurden bewußt die von magnetischen Momenten im Material erzeugten
°
Feldanteile nicht einbezogen. H , V m , und V m sind deshalb per
Definition nur mit der Durchflutung durch äußere Ströme (Ströme
in Leitungen) verknüpft! Demnach ist ohne Materie (Vakuum, näherungsweise Luft)
B = µ0 ⋅ H
Magnetostatik
Seite 127
und mit Materie wegen µ 0 ⋅ H =
def B Spule
B = µ0 ( H + M )
und mit M ≈ χ ⋅ B spule ⁄ µ 0 = χ ⋅ H
B = µ0 ⋅ ( 1 + χ ) ⋅ H = µ0 ⋅ µr ⋅ H = µ ⋅ H
Die Materialgröße µ = µ r ⋅ µ 0 heißt auch absolute Permeabilität des Stoffes. Die Schreibweise mit H ist in der Praxis vorteilhaft,
weil man zunächst H aus den äußeren Strömen direkt berechnen
kann und daraus mit hilfe von Materialkonstanten B . Damit entfällt auch die Indizierung B Spule bzw. B Material .
Die Grundgesetzte schreiben sich mit H in der (im Bereich der
Elektrotechnik) üblichen Form
(4‘)
°∫Γ H ds
=
∫A S d A und
(3)
°∫ Bd A
= 0
Beachte: S sind hier alle äußeren Ströme, nicht die durch Magnetisierung verursachten.
Zur Lösung braucht man dann jedoch noch die Materialgleichung.
B = µ ⋅ H = µr ⋅ µ0 ⋅ H = ( 1 + χ ) ⋅ µ0 ⋅ H
und diese enthält die (bei anisotropen Materialien nicht zutreffende) Annahme, daß χ eine skalare Konstante ist.
6.4.4 Diamagnetismus, Paramagnetismus, Ferromagnetismus
Die atomaren magnetischen Momente m kommen entweder von
- „umlaufenden“ Elektronen
m
IM
−
+
A
Seite 128
GET-Skript
- „um die eigene Achse rotierende“ Elektronen
m
Beide Bilder sind sehr anschaulich, aber quantitativ falsch (klassisch, nicht quantenmechanisch)!
Diamagnetismus (Wismut, Kupfer, Silber).
Ohne H -Feld heben sich die Momente der Elektronen paarweise
auf.
ohne äußerem H-Feld
m1
1
−
mit äußerem H-Feld
m1
H
+
−
2
1
−
m2
+
−
2
m2
Zusätzliche Lorentz Kräfte
- auf (1) in Richtung der Zentrifugalkraft,
- auf (2) entgegen der Zentrifugalkraft
Deshalb muß (1) den Bahnradius verkleinern, die Zentrifugalkraft
verringern und damit wird die Fläche und m 1 kleiner. Durch Vergrößerung des Bahnradius wird dagegen m 2 größer.
Weil m 2 > m 1 , ist m = m 1 + m 2 entgegengesetzt zu H und
–4
sehr klein; χ d ≈ – 10 .
Paramagnetismus (Aluminium, Platin)
Auch ohne H -Feld sind atomare magnetische Momente vorhanden, aber deorientiert. Durch das äußere Magnetfeld erfolgt Ausrichtung der Momente m in Richtung H , also χ p > 0 .
Bei hohen Temperaturen zerstört die thermische Energie immer
wieder die Ausrichtung, χ p ist also temperaturabhängig.
–2
Bei Zimmertemperatur ist χ p ≈ 10
Magnetostatik
Seite 129
Ferromagnetismus
Bei Eisen, Kobalt, Nickel, Gadolinium, Dysprosium und deren Legierungen sind sehr starke magnetische Momente auch ohne H Feld vorhanden. Elektronenspins richten sich spontan parallel zueinander aus (also keine Eigenschaft des einzelnen Atoms!). Die
Ausrichtung beschränkt sich auf kleine Bezirke (Weiß‘sche Beziehung), die ohne H unterschiedlich orientiert sind. Bei Temperaturen über einem kritischen Wert (Curiepunkt) hört die spontane Magnetisierung plötzlich auf. Die Größe der Weiß‘schen Bezirke ist
durch das Energieminimum bzgl. äußerer Feldenergie und Wandenergie der Bezirke gegeben.
N
N S
S
S N
Viel Feldenergie
S N
S
N
S N SN
Keine weitere
Reduzierung
Weniger Feld- Praktisch kein d. äuß. Feldes,
energie, jedoch äußeres Feld, jedoch zusätzl.
1 Wand
jedoch 4 Wände
Wände
Wände enthalten Energie, weil ja gerade entgegengesetzt spinnende Elektronen benachbart sind und parallele Ausrichtung niedrigere Energie hat.
Die Magnetisierungskurve
Die Magnetisierungskurve stellt B Gesamt in Abhängigkeit von H
dar ( H ∼ I Spule , B abhängig von Material!)
B
Neukurve
Br
1
µ0Hc 10-6 µ0H
-1
B r = Remanenz (induktion); H c = Koerzitivfeldstärke
- Steiler Teil der Kurve: Wandverschiebung in Bezirken mit
„leichter Richtung“ (reversibel).
Seite 130
GET-Skript
- Flacherer Teil der Kurve: Wandverschiebung mit „Überwindung von Hindernissen“ (nicht reversibel).
- Flacher Teil der Kurve: Drehung Weiß‘scher Bezirke in Richtung H (viel Energie nötig; Sättigung; irreversibel).
Weil Ausrichtung z. T. irreversibel, gibt es Hystereseschleife bzw.
Neukurve.
- Beim Zurücknehmen von H auf 0 bleibt eine Induktion B r
(Remanenzinduktion).
- Erst bei einer entgegengesetzten Feldstärke H c (Koerzitivfelstärke) geht B auf Null zurück.
Die Fläche der Hystereseschleife ist ein Maß für die Energieverluste infolge irreversibler Vorgänge.
6.5 Der magnetisc
he Kreis
6.5.1 Die Konstanz des magnetischen Flusses φ m
A2
A1
d A2
d A1
dA
Man definiert den Magnetischen Fluß φ m =
d A stets in Richtung B zeigt.
A
∫A
B d A , wobei
Leiter
Weil aber nur in A 1 bzw. A 2 Induktion B ≠ 0 , und weil in
∫A Bd A = 0 vereinbarungsgemäß d A nach außen zeigt,
°
Magnetostatik
Seite 131
im Bild d A 1 aber nach innen, gilt
0 =
°∫A Bd A
also φ m1 =
= – ∫ B d A1 + ∫ B d A2
A1
A2
∫A B d A1
∫A B d A2
=
1
= φ m2
2
oder im homogenen Feld
φ m1 = B 1 A 1 = B 2 A 2 = φ m2
B1
A1
A2
B2
Weil φ m in der Elektrotechnik sehr wichtig ist, erhält es eine eigene Einheit:
2
[ φ m ] = 1Weber = 1Wb = 1T m = 1Vs
6.5.2 Das „sog. Ohm‘sche Gesetz des magnetischen Kreises“
In sich geschlossene Anordnungen aus hochpermeablen Materiallien (magnetischen Leitern) heißen magnetische Kreise und dienen zur Führung des magnetischen Feldes.
lm
A B
I
N Windg.
Legt man die mittlere Länge des magnetischen Leiters mit lm fest,
so gilt näherungsweise
Θ = N⋅I =
°∫ H ds
= H ⋅ lm
Wenn µ r im gesamten Kreis konstant, ist
Seite 132
GET-Skript
lm
lm
B⋅l
Θ = H ⋅ l m = ------------m- = B ⋅ A ⋅ ---------------- = φ m ⋅ ---------------µr µ0 A
µr µ0 A
µr µ0
Wegen der Ähnlichkeit zum Ohm‘schen Gesetz schreibt man auch
Θ = φm ⋅ Rm
lm
wobei R m = --------------- als magnetischer Widerstand bezeichnet
µr µ0 A
wird.
l
Zum Vergleich: U = I ⋅ R mit R = ----------κ⋅A
Magnetischer KreisStromkreis
°
Quellspannung Θ = V m U
φm
Strom
I
Widerstand R m
R
6.5.3 Berechnung magnetischer Kreise
Kreis mit i Abschnitten unterschiedlicher Materialien R mi auf Abschnitten der Länge l mi
V° m = ∫ H ds =
°
∑ H i lmi = ∑ V mi =
i
i
= φ m ∑ R mi = Θ = N ⋅ I
Beispiel: B 1 gegeben, Θ gesucht
lm1
I
lm2
B
lm3
φm = B1 ⋅ A1
V m1 = φ m ⋅ R m1 und V m2 = φ m ⋅ R m2
N ⋅ I = Θ = ( V m1 + V m2 ) ⋅ 2
Magnetostatik
Seite 133
Ersatzschaltbild dazu
Φm
Vm1
Vm2
Θ
Vm3
Vm4
Dies entspricht der Kirchhoff‘schen Maschenregel.
Beispiel 2: Gegeben Θ 1 und Θ 2 ; gesucht φ m1, φ m2, φ m3
Hüllfläche A
I1
I2
Θ1
Θ2
Φ m3
Φ m1
Φ m2
Weil ∫ Bd A = 0 durch Hüllfläche A, ist
°
φ m3 = φ m1 + φ m2
Das entspricht der Kirchhoff‘schen Knotenregel.
Ersatzschaltbild:
Φ m1
Φ m2
Rm1
Θ1
Φ m3 Rm2
Rm3
linke „Masche“ Θ 1 = R m1 φ m1 + R m3 φ m3
rechte „Masche“ Θ 2 = R m2 φ m2 + R m3 φ m3
Θ2
Seite 134
GET-Skript
Für die drei Unbekannten φ m1, φ m2, φ m3 sind also 3 Gleichungen
- 2 Maschengleichungen
- 1 Knotengleichung gegeben.
Beispiel 3: Magnetischer Kreis mit Luftspalt (Motoren, Elektromagnet)
lm1
I
d
B
Reihenschaltung von R me des Eisens und R md des Luftspalts d.
Die Kirchhoff‘sche Regeln für den magnetischen Kreis gelten gut,
solange Streufeld klein bleibt, also d klein gegen ∅ Polflächen.
Dann ist natürlich der magnetische Widerstand des Luftspaltes
d
R md = ---------µ0 A
Da die Magnetisierungskurve meist nur als Diagram verfügbar ist,
werden in der Praxis graphische Lösungen bevorzugt.
Φm
magn. Material
Luft
ges. Kreis
VE
°
VL V = Θ G
- Weil φ m ⁄ A = B und H = V Eisen ⁄ l , kann man anstelle der
üblichen Magnetisierungskurve des Eisens B = f ( H ) auch
φ m = f ( V Eisen ) auftragen, wenn A und l gegeben sind (durchgezogene Kurve).
- Für den Luftspalt kann man entsprechend statt der Geraden
B = µ 0 H die Gerade φ m = V Luft ⁄ R md auftragen (gestrichelt)
- Addiert man waagerecht für jedes φ m die zugehörigen magnetischen Spannungen V E für das Eisen und V L für die Luft, so
erhält man für jedes φ m die notwendige magnetische Rand°
spannung V und damit Θ (strich punktierte Kurve).
Elektrodynamik
7
Seite 135
Elektrodynamik
7.1 Die Grundgesetze der Elektrodynamik
Alle Einschränkungen der Elektrostatik und Magnetostatik, also
( ∂E ) ⁄ ∂t = 0 und ∂B ⁄ ∂t = 0 entfallen also:
(1)
°∫A Ed A
(2)
°∫Γ Eds
(3)
°∫A Bd A
(4)
1
----- ∫ Bds =
µ 0°Γ
bzw.
= q ⁄ ε 0 bzw.
= -
°∫Γ H ds
°∫A Dd A
= q frei
∂
Bd A
∂ t ∫A
= 0
=
∂
∫A (S + ε0 ∂ t E) d A
∂
∫A S aussen + ∂ t D d A
Noch einmal Hinweis:
Bei Schreibweise von (1) und (4) mit D und H ist zu beachten,
daß bei
- D nur freie Ladungen q frei
- H nur äußere Ströme S aussen
gemeint sind.
Seite 136
GET-Skript
7.2 Die Induktionsvorgänge
7.2.1 Der im Magnetfeld bewegte Leiter
a B
l
v
Ua,b
b +
Versuch: Leitfähiger Stab, Länge l wird im Feld B mit Geschwindigkeit v ( v ⊥ B ) bewegt. Zwischen den Enden a, b entsteht
Spannung U ab .
Grund:
- Die Ladungsträger im Leiter werden mit Geschwindigkeit v
bewegt und erfahren Lorentzskraft F L = q ⋅ v × B in Stabrichtung und laufen zum oberen Stabende.
- Die Ladungsträger laufen solange bis das E -Feld zwischen positivem Ende b und negativem Ende a so groß ist, daß die elektrostatische Kraft F E auf die Ladung entgegegengesetzt gleich
F L wird.
- In diesem Gleichgewicht ist also
F E = q ⋅ E = -q ⋅ v × B = -F L und wenn v ⊥ B ⊥ l , ist das Integral über E längs des Drahts
b
∫a E dl
= U ab = l ⋅ v ⋅ B
- Bei Bewegung des Magneten mit Geschwindigkeit - v gegenüber einem festen Draht, also bei gleicher Relativgeschwindigkeit v erhält man die gleiche Spannung U ab , obwohl
v × B = 0 (Erklärung hier zu schwierig, weil relativistisch).
Zusammenfassung:
Bei Relativbewegung zwischen Magnetfeld und geradem Leiter
v ⊥ B ⊥ l entsteht eine induzierte Spannung
U ab = l ⋅ v ⋅ B Bewegungsinduktion
Elektrodynamik
Seite 137
7.2.2 Änderung des magnetischen Flusses φ m in
Leiterschleifen
B
A
U
I
R
Versuch: Durch Ein- und Ausschalten bzw. Vergrößern und Verkleinern des Stromes I wird das Magnetfeld B (Induktion B )
durch die Fläche A der Leiterschleife geändert. Es ändert sich der
magnetische Fluß
φm =
∫A B d A .
Während der zeitlichen Flußänderung ∂φ m ⁄ ∂t entsteht an den Enden der Leiterschleifle ein Spannung U .
Grund:
- Bei zeitlich veränderlichem B -Feld gilt in der Elektrodynamik
°∫Γ Eds
= -
∂
Bd A = – ∂φ m ⁄ ∂t
∂ t ∫A
(nicht mehr wie Elektrostatik ∫ Eds = 0 )
°Γ
- Längs des Randes Γ der Fläche A entsteht ein E -Feld mit Zirkulation gleich der zeitlichen Änderung des Flusses φ m durch
A.
Hier bildet die geschlossene Leiterschleife selbst den Rand um die
vom Magnetfeld durchsetzte Fläche. Die Spannung U 0 um die
Leiterschleife ist also U 0 = - ∂φ m ⁄ ∂t (Vorzeichen siehe später)
Zusammenfassung:
Bei zeitlicher Änderung des magnetischenFlusses φ m durch die
Fläche A einer Leiterschleife entsteht ebenfalls eine induzierte
Spannung U
U 0 = - ∂φ m ⁄ ∂t Transformationsinduktion
Seite 138
GET-Skript
Sowohl für die Bewegungsinduktion als auch für die Transformationsinduktion kann die Zählrichtung von U ab bzw. U 0 aus den
obigen Formeln bestimmt werden (Kreuzprodukt, Flächenorientierungen, Richtungen von Integrationswegen). Da dies i.A. aufwendig ist, benutzt man fast ausschließlich die Lenz’sche Regel.
Lenz‘sche Regel:
„Der durch die induzierte Spannung verursachte Strom fließt in einer solchen Richtung, daß er durch sein Magnetfeld die Flußänderung, durch die er entsteht, zu verhindern sucht.“
Beispiel 1:
S
N
N
S
Bewegung
Bewegter Magnet läßt nach links gerichtetes B wachsen; deshalb
muß Strom nach rechts gerichtetes B erzeugen.
Tieferes Prinzip der Lenz‘schen Regel ist die Energieerhaltung.
Würde der Strom in Beispiel 1 anders fließen, so würde
- der Stabmagnet angezogen (Gewinn mechanischer Energie)
- der Strom die Spule erwärmen( Gewinn von Wärmeenergie)
wir hätten also ein Perpetuum mobile.
Beispiel 2:
F
Der leitfähige Ring springt beim Einschalten von der Spule weg.
Elektrodynamik
Seite 139
7.2.3 Induktionsgesetz und Flußregel
Trotz unterschiedlicher Mechanismen lassen sich die Effekte der
- Bewegungsinduktion und der
- Transformationsinduktion
in eine gemeinsame Darstellung bringen, der allerdings kein
tieferliegendes Prinzip zugrundeliegt.
Beide Phänomene werden durch die bereits von der Transformationsinduktion bekannte Flußregel beschrieben. Dazu wird die Bewegungsinduktion als Folge einer zeitlichen Flußänderung
dargestellt.
1a
a ds
°
U
v
B
b
2
A
1b
Der Stab (2) der Länge l bewegt sich (wie zuvor) im homogenen
Magnetfeld B mit Geschwindigkeit v ( v ⊥ B ⊥ l ) . Seine Enden
a, b sind jetzt über die Schienen (1a) und (1b) an das Voltmeter angeschlossen.
Die ruhenden Schienen erzeugen keine Induktionsspannung, d.h.
die durch Bewegungsinduktion erzeugte Spannung des Stabes ist
wieder U ab = l ⋅ v ⋅ B
Betrachtet man nun die Spannung als zeitliche Änderung des Flusses φ m so bewirkt zuächst die Flächenänderung d A eine Flußänderung -dφ m ⁄ dt = B ⋅ d A ⁄ dt = B ⋅ l ⋅ ds ⁄ dt = B ⋅ l ⋅ v . Die
Betrachtung auf der Grundlage der transformatorischen Induktion
führt also zum gleichen Ergebnis und es ist
U = l⋅v⋅B
Flußregel:
Auch die Bewegungsinduktion läßt sich als Folge einer zeitliche
Flußänderung darstellen. Dabei ist die induzierte Quellspannung
U = - dφ ⁄ dt unabhängig davon, ob die Flußänderung durch zeitliche Änderung der Fläche (Bewegungsinduktion) oder durch zeitliche Änderung des Magnetfeldes (transformatorische Induktion)
zustandekommt.
Seite 140
GET-Skript
7.2.4 Anwendung des Induktionsgesetzes
Beispiel 1:
Induzierte Spannung in einer Spule mit N Windungen. Der Spulenfluß einer Spule mit N Windungen ist
N
ψ =
∑ φi ≈ N ⋅ φWindung
i=1
Also: U = – N ⋅ ( ∂φ ) ⁄ ( ∂t ) = – ( ∂ψ ) ⁄ ( ∂t )
Beispiel 2:
Rotierende Spule im konstanten B -Feld.
B
°
U
A = l⋅b
A α
l ⋅ cos α
Der Winkel α = ω ⋅ t ändert sich proportional zur Zeit t
( ω = const = Winkelgeschwindigkeit)
Zur Zeit t = 0 ist α = 0 und φ ( t = 0 ) = B ⋅ A = φ max
Zu beliebiger Zeit t ist α = ωt und φ ( t ) = B ⋅ ( b ⋅ l ⋅ cos α ) ,
also
φ ( t ) = B ⋅ A ⋅ cos α = φ max cos ωt und
dφ
u ( t ) = -N ⋅ ------ = N φ max ⋅ ω ⋅ sin ωt
dt
Man bezeichnet die Spannung U max = N ⋅ φ max ⋅ ω , bei π ⁄ 2 ,
3π ⁄ 2 usw. als Scheitelspannung. Damit schreibt man auch
u ( t ) = U max ⋅ sin ωt
Elektrodynamik
Seite 141
φ
π/2
π 3π/2
T/2
2π
ωt
T
t
u
Umax
π/2
π
3π/2
2π ωt
Beispiel 3:
Da durch Flußregel nur Phänomene, nicht das Wesen der Bewegungsinduktin beschrieben wird, gibt es Fälle, in denen die Flußregel nicht funktioniert. Beim Barlow‘schen Rad ist der Stromkreis (gestrichelt ---- ) immer örtlich fest und B ist zeitlich
konstant. Also kein dφ ⁄ dt sichtbar.
Trotzdem wird die Spannung aus der Bewegungsinduktion erzeugt.
v
B
-
+
°
U
B
Seite 142
GET-Skript
7.3 Selbstinduktion und Gegeninduktion
Bisher (7.2) Betrachtung der induzierten Spannung u, wobei
- in der Induktionsschleife kein Stom floß, also die
- Induktionsschleife selbst kein B erzeugte.
Jetzt: Stromkreis geschlossen, also i
- Strom in der Induktionsschleife erzeugt selbst B ∼ i
- Bei zeitlicher Änderung di ⁄ dt dieses Stroms resultiert dB ⁄ dt
- Das eigene B -Feld der Schleife induziert in der Schleife selbst
ein dφ ⁄ dt , (Selbstinduktion) und erzeugt eine Spannung u L .
7.3.1 Selbstinduktion
i(t)
di
uL
φ(t)
dφ
Eine Stromquelle erzeugt zeitlich wachsenden Strom i ( t ) mit
Stromänderung di in Richtung i also dφ in Richtung φ . Falls i ( t )
genügend langsam (quasi stationär) sind φ und i proportional
φ = L⋅i
und bei geeigneter Wahl der ZPR von uL ist
di
dφ
u L = ------ = L ⋅ ----dt
dt
Die Proportionalitätskonstante L ist nur von der Geometrie der Anordnung abhängig.
L heißt Selbstinduktivitätskoeffizient, kurz Induktivität. Die Einheit von L ist
V ⋅s
[ L ] = 1 ---------- = 1 Henry = 1H
A
Elektrodynamik
Seite 143
Bei Spulen mit N Windungen gilt
N
∑ φk
= ψ = L ⋅ i ≈ N ⋅ φk
k=1
di
dψ
dφ
u L = ------- = N ------ = L ----dt
dt
dt
Induktivität L ist Eigenschaft einer Spule so wie Kapazität C Eigenschaft eines Kondensators ist.
7.3.2 Gegeninduktion
Bei zwei verkoppelten Spulen hängt sowohl die Spannung an Spule 1, als auch die Spannung an Spule 2 von den Stromänderungen
beider Spulen ab. Zur Vereinfachung fließe zunächst
nur Strom i 1 in Spule 1
u‘1
i1
φ11
u‘2
φ21
Mit φ 11 = φ in Spule 1 von Strom 1 und φ 21 = φ in Spule 2 von Strom 1
ist dann u′ 1 = N 1 dφ 11 ⁄ dt und u′ 2 = N 2 dφ 21 ⁄ dt
Nun fließe nur Strom i 2 in Spule 2
u‘‘1
φ12
φ22
u‘‘2
i2
Mit φ 22 = φ in Spule 2 von Strom 2 und φ 12 = φ in Spule 1 von Strom 2
ist dann u″ 1 = N 1 dφ 12 ⁄ dt und u″ 2 = N 2 dφ 22 ⁄ dt
Seite 144
GET-Skript
Die Spannungen bei Strom in beiden Spulen (Superposition!)
u 1 = (u′ 1 + u″ 1 ) = N 1 dφ 11 ⁄ dt + N 1 dφ 12 ⁄ dt
u 2 = ( u′ 2 + u″ 2 ) = N 2 dφ 21 ⁄ dt + N 2 dφ 22 ⁄ dt
Die Flüsse φ 11 und φ 21 kommen von i 1 .
Die Flüsse φ 22 und φ 12 kommen von i 2 .
Also folgende Proportionalitäten
N 1 ⋅ φ 11 = L 11 ⋅ i 1 ; N 2 ⋅ φ 21 = L 21 ⋅ i 1
N 2 ⋅ φ 22 = L 22 ⋅ i 2 ; N 1 ⋅ φ 12 = L 12 ⋅ i 2
L 11 und L 22 heißen Selbstinduktionskoeffizienten der Spule 1
bzw. 2, L 12 und L 21 heißen Gegeninduktionskoeffizienten.
Es gilt (Beweis später) L 12 = L 21 = M .
Dann ist
di 1
di 2
u 1 = L 11 ------- + L 12 ------dt
dt
di 1
di 2
u 2 = L 21 ------- + L 22 ------dt
dt
7.3.3 Abschätzung von Induktivitäten
Die allgemeine Berechnung von L ij ist recht schwierig und soll
hier nicht gezeigt werden. Man kann aber Flüsse von Spulen abschätzen und daraus die Induktivitäten berechnen:
Selbstinduktionskoeffizient L jj :
Es galt für Spule j : N j ⋅ φ jj = L jj ⋅ i j oder L jj = N j ⋅ φ jj ⁄ i j
Das „Ohm‘sche Gesetz“ des magnetischen Kreises j besagt:
N j ⋅ i j = Θ j = R mjj ⋅ φ jj oder φ jj = N j ⋅ i j ⁄ R mjj
oben eingesetzt:
2
2
L jj = N j ⁄ R mjj also Selbstinduktion proportional N j .
Elektrodynamik
Seite 145
Ähnlich gilt für
Gegeninduktionskoeffizient L jk zwischen Spule j und k
L jk = Nj ⋅ φ jk ⁄ i k
und unter formaler Anwendung des „Ohm‘schen Gesetzes“ für
den magnetischen Kreis „ jk “ist φ jk = N k ⋅ i k ⁄ R mjk , also
L jk = N j ⋅ N k ⁄ R mjk
Der Gegeninduktionskoeffizient ist also proportional zum Produkt
der Windungszahlen N j ⋅ N k .
Beispiel: Abschätzung der Induktivität einer langen Zylinderspule
mit Länge l, Fläche A.
l
R m ( Innenraum Spule ) = ---------µ0 A
R m ( Aussenraum ) « R m ( Innenraum )
also zur Abschätzung:
l
R m = R m ( Innen ) + R m ( Aussen ) ≈ ---------µ0 A
2A
L ≈ µ 0 N --- Induktivität einer langen Zylinderspule
l
7.4 Energie im magnetischen Feld
7.4.1 Die magnetische Energie einer stromdurchflossenen
Spule
Einschalten eines Kreises mit Induktivität und Widerstand:
uR
R
u0
uL
i
di
u 0 = u R + u L = i ⋅ R + L ⋅ ----dt
L
Seite 146
GET-Skript
In der Zeit t bis (t+dt) fließt der Strom i = i ( t ) und dieArbeit der
Quelle in der Zeit dt ist
2
u 0 ⋅ i ⋅ dt = i ⋅ R ⋅ dt + L ⋅ i ⋅ di = dW ges ,
d. h. die Arbeit u 0 ⋅ i ⋅ dt der Spannungsquelle liefert
2
- Wärmeenergie dW T = i ⋅ R ⋅ dt und
- magnetische Energie dW M = L ⋅ i ⋅ di
Beachte: während die vom Widerstand erzeugte Wärmeenergie
mit der Zeit des Stromflusses wächst, hängt die Zunahme der magnetischen Energie der Induktivität nicht von der Zeit dt , sondern
nur von der Stromzunahme di ab.
Die gesamte magnetische Energie der Induktivität erhält man
durch Aufsummieren aller dW M von Strom i = 0 am Anfang bis
Strom i = I am Ende:
i=I
WM =
∫
1
2
L ⋅ i ⋅ di = --- L ⋅ I Magnetische Energie einer Spule
2
i=0
1
2
Vergleiche: W E = --- CU Elektrische Energie einer Kapazität
2
7.4.2 Energie W M mehrerer (gekoppelter) Spulen
Mit Spule 1 an u 01 und Spule 2 an u 02 gilt
di 1
di 2
u 01 = L 11 ------- + L 12 ------- | ⋅ i 1 dt und
dt
dt
di 2
di 1
u 02 = L 22 ------- + L 21 ------- | ⋅ i 2 dt
dt
dt
Daraus ergibt sich wie in 7.4.1
u 01 i 1 dt = L 11 i 1 di 1 + L 12 i 1 di 2 und
u 02 i 2 dt = L 22 i 2 di 2 + L 21 i 2 di 1
und die magnetische Energie ändert sich insgesamt um
dW M = L 11 i 1 di 1 + L 12 i 1 di 2 + L 21 i 2 di 1 + L 22 i 2 di 2
Elektrodynamik
Seite 147
Auch hier hängt W M nicht von der Zeit, sondern nur von der
Stromzunahme di ab. Aufsummierung zu W M in zwei Schritten:
Zunächst Spule 1 einschalten: i = 0 auf i = I 1
Wegen i2 = di2 = 0 bleibt nur
i1 = I 11
W M1 =
∫
1
2
L 11 i 1 di 1 = --- L 11 I 1
2
i1 = 0
Jetzt dazu Spule 2 einschalten: i 2 = 0 auf i 2 = I 2
(wobei nun di1 = 0 ist)
W M = W M1 + ∫ dW M2 =
i2 = I 22
= W M1 +
∫
i2 = I 22
L 22 i 2 di 2 +
i2 = 0
∫
L 12 i 1 di 2
i2 = 0
1
2 1
2
W M = --- L 11 I 1 + --- L 22 I 2 + L 12 I 1 I 2
2
2
Bei anderer Reihenfolge (erst i 2 dann i 1 einschalten) ist
1
2 1
2
W M = --- L 11 I 1 + --- L 22 I 2 + L 21 I 1 I 2
2
2
Weil W M aber nicht von der Reihenfolge abhängen darf und gleich
sein muß, ist L 12 = L 21 = M und die
Magnetische Energie zweier gekoppelter Spulen:
1
2 1
2
W M = --- L 11 I 1 + --- L 22 I 2 + M ⋅ I 1 I 2
2
2
Die Größe der Gegeninduktivität M läßt sich wie folgt abschätzen:
Die in den Induktivitäten gespeicherte magnetische Energie WM
muß aus physikalischen Gründen stets positiv sein, also
1
1
--- L 11 ⋅ i 12 + M ⋅ i 1 ⋅ i 2 + --- L 22 ⋅ i 22 ≥ 0
2
2
Das bleibt auch richtig wenn man durch die stets positive Größe
L 11 ⋅ i 22 ⁄ 2 teilt, also auch
2
i 1 M L 22
i---1- + 2 ⋅ --- ⋅ -------- + -------- > 0
i 2
i 2 L 11 L 11
Seite 148
GET-Skript
Die linke Seite ist ein Polynom in (i1/i2), das Nullstellen bei
2
– M ± M – L 11 ⋅ L 22
i---1-
= ------------------------------------------------- i 2 1, 2
L 11
besitzt. Da die obige Ungleichung aber für alle Ströme i1 und i2,
also für alle Verhältnisse (i1/i2) richtig ist, dürfen die Nullstellen
nicht im Reelen liegen und es muß gelten
2
M ≤ L 11 L 22
Man schreibt auch oft
M = k L 11 L 22 mit 0 ≤ k ≤ 1
Dabei ist k ist der Koppelkoeffizient zwischen den Spulen, also
- kleiner gemeinsamer Fluß (lose Kopplung): k ≈ 0
- großer gemeinsamer Fluß (feste Kopplung): k ≈ 1
7.4.3 Das magnetische Feld als Sitz der magnetischen Energie
Die magnetische Energie sitzt im magnetischen Feld. Die Herleitung ist hier zu schwierig, aber man kann sich die Situation wie
folgt plausibel machen.
Man denkt sich ein beliebiges Feld B aus vielen kleinen homogenen „Zellen“ aufgebaut . Es genügt daher zunächst die Feldenergie
im homogenen Feld einer solchen Zelle, einer langen dünnen Spule zu berechnen (Volumen V = l ⋅ A
dφ
dW M = u L ⋅ i ⋅ dt = N ------ ⋅ i ⋅ dt = N ⋅ i ⋅ dφ
dt
Die Zunahmen der Energie pro Volumen V = l ⋅ A (Energiedichte) ist
N ⋅ i dφ
Θ
φ
dw M = dW M ⁄ V oder dw M = ---------- ⋅ ------ = ---- ⋅ d ---
A
l
A
l
und mit Θ ⁄ l = H bzw. φ ⁄ A = B
dw M = H ⋅ d B und wenn H || B (isotrope Materialien)
dw M = H ⋅ dB
Elektrodynamik
Seite 149
(Bei exakterer Herleitung zeigt sich, daß dies immer gilt, auch
wenn H und B nicht parallel sind). Durch Aufsummieren erhält
man aus den Energiedichteänderungen die gesamte Energiedichte
wM =
B
∫0 H dB
Ohne Materie ist B = µ 0 H und damit
µ0 2
1 B
1 2
w M = ----- ∫ B dB = --------- B = -----H
2
µ0 0
2µ 0
Die Gesamtenergie ergibt sich dann aus der Energiedichte durch
Aufsummieren über das Volumen zu
µ0
1 1
2
2
W M = --- ⋅ ----- ∫ B dV = ----- ∫ H dV
2 V
2 µ0 V
7.4.4 Energieverluste durch Ummagnetisierung
B
Die Energiedichte w M = ∫ H dB kann in einem Stoff, bei dem
0
B = f ( H ) nicht linear ist (z. B. Eisen) graphisch anhand der Magnetisierungskurve integriert werden. (Bei der Magnetisierungskurve wurde wie gewohnt B auf der Hochachse aufgetragen,
obwohl über dB integriert wird!)
B
H
dB
HdB
WM
H
Bei Magnetisierungskurve mit Hysterese kann man den Energieverlust pro Ummagnetisierung in vier Schritten bestimmen:
B
B
W23
3
3
2
2
H
4
1
W12
H
4
1
W12−W23
Seite 150
GET-Skript
rechter Teil: w 13 = w 12 – w 23 > 0
linker Teil: w 31 = w 34 – w 41 > 0
Für einen Umlauf um die Hystereseschleife erhält man dann
w 12341 = w 13 + w 31 > 0
Die Fläche zwischen den Ästen der Hysteresekurve w 12341 entspricht also der bei einer Hin- und Rückmagnetisierung vom Eisen
aufgenommenen Energie.
7.4.5 Berechnung von Kräften aus der magnetischen Energie
Prinzip der virtuellen Verrückung:
Gewonnene mechanische Arbeit = Abnahme der magnetischen
Energie oder
Fd x = – d W M
Beispiel:
Kraft zwischen zwei Eisenteilen. Luftspalt so klein, daß B homogen.
d
N
S
B
F
dx
Querschnitt A
B soll bei Verschiebung dx konstant sein. Die magnetische Energie im Spalt wird um die Energie des Volumens dx ⋅ A kleiner,
also
1 2
dW M = – w MLuft ⋅ V = - --------- B Ad x
2µ 0
Läßt man die magnetische Energie des nachrückenden Eisens außter Acht (um Faktor µ r » 1 kleiner), so gilt
1 2
Fd x = - --------- B Ad x oder
2µ 0
1 2
F = - --------- B A Kraft zwischen den Polenschuhen
2µ 0
Elektrodynamik
Seite 151
7.5 Wirbelströme
Versuch 1
leitfähiges Blech
v
B
- Im B -Feld durch Bewegungsinduktion Lorentzkraft. Strom i
fließt nach unten und kann außerhalb B (keine Kraftwirkung)
nach oben zurückfließen.
- Es fließt ein zirkularer Strom, ein sog. Wirbelstrom.
Die Richtung ist nach Lenz so, daß Ursache (Herausziehen verhindert werden soll, also F in Gegenrichtung v Man nutzt diese
Bremswirkung auch technisch bei der Wirbelstrombremse.
B
Versuch 2
-
-
-
-
-
kammartiges Blech
v
B
+
+
+
+
+
+
Ebenfalls Spannung längs der „Zähne“, aber kein Rückflußweg für
einen Strom i .
Seite 152
GET-Skript
Versuch 3
B = B 0 sin ωt
dφ
-----dt
i=i0sinωt
Eisenklotz
Wirbelströme
gleicher mag.
Widerstand
isolierte
Blechpakete
praktisch keine
Wirbelströme
Durch Aufteilen magnetischer Leiter in isolierte Blechpakete werden Wirbelstromverluste bei häufigem Ummagnetisieren (Wechselstrom) vermieden.
7.6 Der Verschiebungsstrom und sein Magnetfeld
Die Gl (4) der Grundgesetze heißt vollständig
1
----- ∫ Bds =
µ 0°Γ
∂
∫A S + ε0 ∂ t E d A
Maxwell führte (1865) den Term
schlossene Hüllfläche A ist
∂
°∫A ε0 ∂ t E d A
= ε0 ⋅
∂
∫A ε0 ∂ t E d A
ein. Für eine ge-
∂
d q
E d A = ε 0 ----- = I
∫
∂ t°A
d t ε 0
Der Term hat also die Bedeutung eines Stromes und heißt Verschiebungsstrom. Für eine geschlossene Hüllfläche ist kein Rand
Γ vorhanden (zugebundener Luftballon, Γ → 0 ), also
1
----- ∫ B ds = 0 und damit wird aus der obigen Gleichung (4)
µ0 Γ
0 =
∂
°∫A S + ε0 ∂ t E dA (Strom + Verschiebungsstrom)
Elektrodynamik
Seite 153
Strom und Verschiebungsstrom zusammengenommen hat keine
Quellen, bildet also geschlossene Bahnen.
Durch Umschreiben erhält man die sog. Kontinuitätsgleichung
°∫A Sd A
= -ε 0 ⋅
dq
∂
E d A = - -----∫
°
dt
∂t A
Ein aus einer geschlossenden Hüllfläche austretender Strom ist
gleich der Ladungsabnahme im Innern (Ladungserhaltung)!
Betrachtet man Strom und Verschiebungsstrom durch nicht geschlossene Flächen und betrachtet das Magnetfeld längs des Randes, so zeigt sich, daß das Magnerfeld eines Stromes und eines
entsprechenden Verschiebungsstromes gleich ist.
B
Γ
E
A2
A1
dq
I = -----dt
I
Begründung: B längs Γ darf nicht von der Form der Flächen A 1
bzw. A 2 abhängen. Durch A 1 fließt Strom I . Durch A 2 flließt
Verschiebungsstrom. Verschiebungsstrom bildet ja Fortsetzung
von I und erzeugt ebenfalls B .
Seite 154
GET-Skript
8
Stromkreis im quasistationären Zustand
8.1 Der quasistationäre Zustand
Kapitel 2, 3 und 4: Zusammenschaltung von ohm‘schen Widerständen (R) und Verhalten bei Gleichspannung / Gleichstrom.
Kapitel 5, 6 und 7: Betrachtung von Kapazitäten (C) und Induktivitäten (L) bei zeitlich veränderlichen Spannungen / Strömen.
Jetzt: Schaltungen aus R, L, C an zeitlich nicht konstanten Quellen.
Lösung der Maxwell-Gleichungen muß dann über die ganze
Struktur einer realen Schaltung erfolgen, also
- (1) über alle Bauelemente, Quellen
- (2) über alle Verbindungsleitungen
- (3) an allen Stellen im Raum.
In vielen praktischen Fällen kann man die Lösung vereinfachen,
wenn entsprechende Bedingungen zutreffen.
Quasistationärer Fall:
Die Ausbreitungszeit elektrischer und magnetischer Felder innerhalb der betrachteten realen Schaltung ist kurz im Vergleich zu der
Zeit, in der sich diese Felder ändern. Dann kann man die Felder
wie in der Statik berechnen und das Feld ist darstellbar als Produkt
aus einer Ortsfunktion ( x, y, z ) und einer Zeitfunktion ( t ) . Durch
den quasistationären Fall vereinfacht sich also (3).
E ( x, y, z, t ) ≈ E ( x, y, z ) ⋅ f ( t )
B ( x, y, z, t ) ≈ E ( x, y, z ) ⋅ f ( t ) .
Idealisierte Bauelemente
In vielen praktischen Fällen kann man dann weiterhin reale Bauelemente durch Kombinationen sog. idealisierter Bauelemente beschreiben und (1) un (2) vereinfachen. Man nimmt dabei an
-
Verbindungsdrähte widerstandslos
äußere magnetische Felder vernachlässigbar klein
Kapazität speichert nur elektrische Energie
Induktivität speichert nur magnetische Energie
Widerstand setzt nur elektrische Energie in Wärme um.
Stromkreis im quasistationären Zustand
Seite 155
Sinusförmige Vorgänge
In Kapitel 9 werden die zeitveränderlichen Spannungen und Ströme auf die technisch wichtigen cosinusförmigen Veränderungen
f ( t ) ∼ cos ( ωt ) eingeschränkt. Dadurch vereinfacht sich die
Schreibweise und sie wird vergleichbar mit der Schreibweise für
Gleichstromschaltungen.
8.2 Idealisierte Bauelemente und Quellen
8.2.1 Ideale Induktivität
Das magnetische Feld wird auf einen bestimmten räumlichen Bereich begrenzt, z.B. durch Toroidform (zusammengebogene, lange
Spule), abschirmendes Gehäuse, usw.
Dadurch gilt quasistationärer Fall und es gibt keine Wechselwirkung mit anderen Teilen der Schaltung.
Weiter sei Widerstand der Leiter = 0 und Kapazität zwischen
Drähten = 0.
1 i
1 i
u
u
2
2
L
Für den geschlossenen Weg Γ gilt
°Γ∫ Eds
=
∫
Eds +
1 aussen 2
∫
Eds
2 Draht 1
und weiterhin ist für den Weg Γ
°Γ∫ Eds
∫
d
dψ
= – ----- ∫ B d A = – ------- , also
dt
dt
1 aussen 2
Eds +
∫
2 Draht 1
d
dψ
Eds = – ----- ∫ B d A = – ------- = u
dt
dt
Seite 156
GET-Skript
Im Draht ist R = 0 , also auch mit Strom E = 0 und somit
∫
∫
Eds = 0 , also
2 Draht 1
Eds = u = u 12
1 ausssen 2
Die induzierte Spannung u fällt also zwischen den realen Klemmen
ab, ist also die Klemmenspannung u12..
Wählt man die Zählpfeile so, daß i ∼ – ∫ B d A = – ψ gleiche Zeitfunktion haben (quasistationär) sodaß di ⁄ dt ∼ – dψ ⁄ dt = u wird,
dann ist die Beziehung zwischen Klemmenstrom und Klemmenspannung an einer idealisierten Induktivität:
di
u 12 = L ⋅ ----dt
Klemmenspannung ideale Induktivität
L ist eine das Bauteil beschreibende Konstante
8.2.2 Ideale Kapazität
Das E -Feld wird auf einen bestimmten räumlichen Bereich beschränkt, z.B. durch eng gegenüberliegende Kondensatorplatten,
also kein Streufeld. Dadurch gilt quasistationärer Fall und es gibt
keine Wechselwirkung mit anderen Teilen der Schaltung.
Weiterhin seien die Ladungen auf Verbindungsdrähten und das
Magnetfeld von Leitungs- und Verschiebungsstrom vernachlässigbar, die Leitfähigkeit des Dielektrikums = 0 und Widerstand der
Anschlußdrähte und Platten = 0
1 i
1 i
1’
u
u
C
2’
2
2
Weil B vernachlässigbar, ist ∫ E ds = 0 , also
°
∫
E ds +
1 Draht 1′
∫
E ds +
1′ Fel d 2′
∫
E ds +
2′ Draht 2
E ds = 0 , also
Draht
∫
1′ Fel d 2′
E ds = –
∫
2 aussen 1
E ds =
∫
E ds = 0
2 aussen 1
∫
Im Draht 1-1‘ und 2-2‘ wegen R = 0
∫
1 aussen 2
E ds = u 12
Stromkreis im quasistationären Zustand
und die Klemmenspannung ist u 12 =
Seite 157
∫
E ds
1′ Fel d 2′
Weiterhin gilt für eine geschlosssene Fläche A umd die Platte 1′ ,
also für eine Fläche mit Rand Γ = 0
∂D
- d A
°A∫ S + -----∂t
=
d
°A∫ Sd A + d t °A∫ Dd A
°Γ∫ H ds
= 0 und damit
dq
dq
= – i + ------ = 0 und i = -----dt
dt
Wählt man als positive Stromrichtung die in die Hüllfläche (um
Platte 1′ herum) hinein, also parallel zum Zählpfeil der Zeichnung, so ist
dq
d
i = ------ = ∫ Dd A und q =
dt
dt°
A
°A∫ Dd A
Wegen der gleichen Zeitfunktion für E und D ist dann auch
q =
°A∫ Dd A ∼ 1′ →∫ 2′ E ds = u12
und somit C = q ⁄ u 12 zeitlich konstant. Mit C=const ist aber
i = dq ⁄ dt = d ⁄ dt ( C ⋅ u 12 ) = C ⋅ d u 12 ⁄ dt
Zwischen Klemmenstrom und Klemmenspannung eines idealen
Kondensators gilt also die Beziehung
du 12
i = C ⋅ ----------dt
8.2.3 Idealer Widerstand
Das Magnetfeld der Leitungen sei vernachlässigbar, der Widerstand der Zuleitungen = 0.
1 i
1 i
u
u
2
2
R
Seite 158
GET-Skript
Im Gegensatz zu Induktivität und Kapazität sind die Leitungsmechanismen in einem Widerstand viel komplizierter und noch nicht
quantitativ behandelt. Wir müssen akzeptieren, daß (im Gegensatz
zur Elektrostatik) in stromdurchflossenen Leitern ein Feld E ≠ 0
existieren kann und daß
u 12 =
∫
E ds ∼ i .
1→R→2
Diese Proportionalität gilt recht gut für
- nicht zu hohe Spannungen
- nicht zu hohe Frequenzen.
In diesen Fällen ist R praktisch konstant und es gilt der Zusammenhang
u 12 = R ⋅ i
8.2.4 Idealer Generator
Beim idealen Generator sei der Widerstand der Wicklung = 0 , das
B -Feld des Stromes i verschwindend klein gegen Feld des Erreger-Magneten und alle B -Felder räumlich begrenzt um den Generator.
i
i
1
u
1
u
~
2
2
Ändert sich der Fluß ψ E durch die Spule beim Drehen, so ist
∫ Eds + ∫ Eds
°∫ Eds = Klemmen
Wicklung
und wegen
∫
Eds = 0 ( R Draht = 0! ) wird
Wicklung
∫
Klemmen
dψ
= – ----------E
dt
dψ
Eds = u 12 = – ----------E
dt
Stromkreis im quasistationären Zustand
Seite 159
Da dψ Erreger ⁄ dt nur von Fläche und Windungszahl der Wicklung, von der Generatordrehzahl und vom Fluß des Erregermagneten abhängen, ist die Spannung u des idealen Generators
unabhängig vom entnommenen Strom i und somit unabhängig von
der äußeren Schaltung (ideale Quelle).
8.2.5 Kirchhoff‘schen Gleichungen im quasistationären Fall
Im quasistationären Zustand gelten weiterhindie Kirchhoff‘schen
Regeln ∑ u k = 0 (Masche) und ∑ i k = 0 (Knoten).
k
k
Weil außerhalb der Schaltelemente kein B (räumliche Begrenzung), gilt für beliebigen geschlossenen Weg Γ außerhalb von
Schaltelementen ∫ Eds = 0 .
°Γ
u2
c
u3
b
u1
u5
5
∑ uk
=
k=1
b
∫a Eds , u2
b
∫a
c
+∫
und allgemein:
b
u4
~
a
Mit u 1 =
Integration
d
=
e
c
∫b Eds , ... u5
a
+ .... + ∫ Eds =
∑ uk
e
=
a
∫e Eds ist
°Γ∫ Eds
= 0
= 0
k
Die Kirchoff‘sche Maschenregel gilt also auch im quasistationären Zustand.
Weil bei idealisierten Bauelementen wegen der räumlichen Eingrenzung der Felder außerhalb dieser auch kein E und D ist, wird
außerhalb der Bauelemente dD ⁄ dt = 0 und
∂D
- d A = ∫ S d A
∫ S + -----∂t
A
A
=
°Γ∫ H ds
Seite 160
GET-Skript
Für eine geschlossene Fläche A um einen Knoten gilt dann wegen
Rand Γ = 0!!
°A∫ Sd A
=
°Γ∫ H ds
= 0 , also ∫ Sd A = 0
°A
geschl.
Fläche
A
i2
Knoten
i1
dA
i3
i4
Da außerhalb der Drähte kein Strom fließt, ist
Drahtquerschnitte ungleich Null.
Für Draht 1 (Querschnitt A 1 ): i 1 =
∫ S dA
nur über
∫A Sd A ,
1
für Draht 2 (Querschnitt A 2 ): i 2 =
∫A Sd A usw. Also
2
4
∑ ik
k=1
=
∫
+
A1
und allgemein
∫ +... + ∫ S d A
A2
∑ ik
A4
=
°A∫ Sd A
= 0
= 0
k
D.h. Kirchhoff‘sche Knotenregel gilt auch im quasistationären
Fall.
8.2.6 Reale Bauelemente und deren Ersatzschaltung
Einige Annahmen, die bei der Beschreibung idealer Bauelemente
gemacht wurden, treffen in der Praxis nicht zu.
Bei einer Induktivität L ist der Drahtwiderstand R L ≠ 0 . Dies läßt
sich durch eine Ersatzschaltung berücksichtigen, in der L und RL
in Serie geschaltet sind.
i
L
RL
u
Stromkreis im quasistationären Zustand
Bei niedrigen Frequenzen gilt dann
di
u = – L ⋅ ----- + R L ⋅ i
dt
Bei höheren Frequenzen ist die Kapazität C L zwischen den Windungen nicht vernachlässigbar. Diese berücksichtigt man im Ersatzschaltbild durch zusätzliche Parallelschaltung von C L .
Ein ähnliches Ergebnis liefert ein Widerstand R , dessen Drahtwicklung eine Induktivität L R ≠ 0 hat. Auch in diesem Fall erhält
man als Ersatzschaltung eine Serienschaltung aus R und LR.
i
R
LR
u
Bei niedrigen Frequenzen ist dann
di
u = R ⋅ i – L R ⋅ ----dt
Bei einem Kondensator C ist häufig der Widerstand RC des Dielektrikums nicht unendlich. Parallel zum Verschiebungsstrom
fließt dann noch ein Strom durch den Widerstand RC des Dielektrikums, der durch eine Parallelschaltung von C und RC im Ersatzschaltbild berücksichtigt wird
RC
i
C
u
Es gilt also
du 1
i = C ⋅ ------ + ----- ⋅ u
dt R c
Beim realen Generator hat die Spule S eine Induktivität L S ≠ 0
und einen Widerstand R S ≠ 0 . Bei einem Generatorstrom i mißt
man an dieser realen Spule die Spannung
di
u S = R S ⋅ i – L S ⋅ ----- .
dt
Seite 161
Seite 162
GET-Skript
Der ideale Generator (8.2.4) erzeugte die (stromunabhängige)
Spannung
dψ E
u 0 = – ---------- .
dt
Da dem Generator nur Strom entnommen werden kann, der durch
die Spule fließt, bleibt die Klemmenspannung
di
u = u 0 – u S = u 0 – R S ⋅ i – L S ⋅ ----- .
dt
Dazu gehört das Ersatzschaltbild
LS
~
u0
RS
uS
u
Merke: L S, R S möglichst klein, dann ist u wenig abhängig von i .
Lineare Netze im eingeschwungenen Zustand
9
Seite 163
Lineare Netze im eingeschwungenen Zustand
Netzwerke aus R, L und C werden im quasistationären Fall beschrieben durch die
linearen Kirchhoff‘schen Gleichungen
∑ uk = 0 (Masche) und ∑ ik = 0 (Knoten)
k
k
und durch die linearen Differentialgleichungen der Zweipole
u = R ⋅ i ; u = Ldi/dt und i = Cdu/dt .
Sie heißen deshalb „Lineare Netze“.
Der „eingeschwungene Zustand“ stellt sich nach dem Abklingen
aller Einschaltvorgänge ein. Die mit dem Einschalten verbundenen Ausgleichvorgänge werden später behandelt.
9.1 Zeitveränderliche Vorgänge
Man unterscheidet bei Vorgängen, die über der Zeit ablaufen
Gleichvorgänge:
x ( t ) = const
Veränderliche Vorgänge:
Alle anderen
x(t)
t
Bei den Veränderlichen Vorgängen unterscheidet man weiter
Periodische Vorgänge:
x(t ) = x(t + T )
x(t) = x(t + T)
T
Periode
t
Wechselvorgänge:
Wechselvorgänge sind periodische Vorgänge, die sich aus Überlagerung von sinusförmigen Vorgängen darstellen lassen. Oder:
Wechselvorgänge sind periodische Vorgänge ohne Gleichanteil.
Seite 164
GET-Skript
Sinusförmige Vorgänge:
Wechselvorgänge mit sinus- bzw. cosinusförmigem Verlauf sind
in der Technik besonders wichtig und werden wie folgt beschrieben:
x
x̂
ωt
ϕS
ωT = 2π
Dabei bezeichnet man mit
Periodendauer: das Zeitintervall T
Periode: den Abschnitt der Funktion innerhalb T
Scheitelwert: X̂
Frequenz: f = 1 ⁄ T mit [ f ] = s
Kreisfrequenz:
–1
= Hz
ω = 2π ⋅ f
Nullphasenwinkel: ϕ s (Index s für Sinus)
Beachte: das Argument einer sin-Funktion kann nur ein Winkel,
nicht aber eine Zeit sein. Dieser zeitlich veränderliche Winkel
2π
α ( t ) = ------ ⋅ t = ω ⋅ t
T
wächst zwischen t=0 und t=T linear mit der Zeit von
α ( t = 0 ) = 0 auf α ( T ) = 2π an. Die Addition eines konstanten
positiven Winkels ϕ s verschiebt die sin-Funktion deshalb auf der
Zeitachse nach links (d.h. die Funktion sieht zum Zeitpunkt t aus
wie die nicht verschobene zu einem späteren Zeitpunkt!)
Weil sin α = cos ( α – π ⁄ 2 ) ist auch
π
x ( t ) = X̂ ⋅ sin ( ωt + ϕ s ) = X̂ ⋅ cos ωt + ϕ s – ---
2
= X̂ ⋅ cos ( ωt + ϕ c )
wobei ϕ c = ϕ s – π ⁄ 2 Nullphasenwinkel der cos-Funtktion ist.
Lineare Netze im eingeschwungenen Zustand
Seite 165
9.2 Wichtige Mittelwerte
9.2.1 Arithmetischer Mittelwert
Schließen ein Gleichvorgang x ( t ) = x = const und ein periodischer Vorganges x ( t ) zwischen t und t+T die gleiche Fläche über
der Zeitachse ein, so ist x der arithmetische Mittelwert des periodischen Vorganges .
x
x
t1
1
x = --T
T
t
(t1 + T )
∫
x ( t ) dt
t1
für den speziellen Fall x ( t ) = X̂ ⋅ sin ( ωt ) ist
X̂
x = -------ωT
ω(t1 + T )
∫
sin ( ωt ) dωt = 0
ωt 1
Beachte: eine Winkelfunktion kann nur über einen Winkel ωt aufgetragen, bzw. über ein Winkelinkrement dωt integriert werden.
Die Phasenverschiebung ϕ s muß nicht berücksichtigt werden,
weil t1 willkürlich verschoben werden kann.
Der arithmetische Mittelwert von sinusförmigen (cosinusförmigen) Vorgängen ist also Null. Dann haben auch Wechselvorgänge
(Überlagerung von Sinusvorgängen) den arithmetischen Mittelwert Null.
Also: Periodische Vorgänge mit x = 0 heißen Wechselvorgänge.
Es gilt auch:
1
0 = --T
t1 + T
∫
[ x ( t ) – x ] dt
t1
Also: Jeder periodische Vorgang x ( t ) von dem man den Gleichvorgang x subtrahiert, ist ein Wechselvorgang [ x ( t ) – x ] .
Seite 166
GET-Skript
9.2.2 Gleichrichtwert
Der arithmetische Mittelwert der Beträge x ( t ) einer periodischen
Funktion heißt Gleichrichtwert x (Achtung! x ≠ x )
1
x = --T
t1 + T
∫
x ( t ) dt
t1
Insbesondere für x = X̂ ⋅ sin ( ωt + ϕ ) ist
X̂
x = -------ωT
( ωt 1 + ωT )
∫
sin ( ωt + ϕ ) dωt
ωt 1
Mit ωt + ϕ = ξ wird dωt = dξ
und mit ωt 1 = – ϕ wird ξ 1 = 0 , also
2π
X̂
X̂
x = ------ ∫ sin ξ dξ = 4 ⋅ -----2π
2π
0
2X̂
= - ------- cos ξ
π
π⁄2
∫
sin ξ ⋅ dξ=
0
π⁄2
0
2X̂
= ------- = x
π
(Sinus)
x
x̂
sin ωt
x
ωt
Lineare Netze im eingeschwungenen Zustand
9.2.3 Effektivwerte
Der quadratische Mittelwert
x eff =
2
x =
2
x heißt Effektivwert.
1 (t1 + T ) 2
--- ∫
x ( t ) dt
T t1
Für sinusförmige Vorgänge x ( t ) = X̂ ⋅ sin ( ω + ϕ ) ist
2
1 ω(t1 + T )
-------- ∫
( X̂ ⋅ sin ( ωt + ϕ ) ) dωt
ωT ωt 1
1
2
Mit mit ωt + ϕ = ξ und sin ξ = --- [ 1 – cos 2ξ ] ist
2
x eff =
X̂
x eff = ---------- ⋅
2π
2π
∫0
X̂
2
X̂
sin ξdξ = ---------- π = ------
2π
2
2
1
sin ξ = --- [ 1 – cos 2ξ ]
2
x
0,5
1
--- ⋅ 2π
2
sin ξ
ξ
X̂
Der Effektivwert eines sinusförmigen Vorgangs ist x eff = ------2
Mit dem Effektivwert läßt sich die mittlere Leistung von Wechselströmen sehr einfach ausdrücken. Mit der Schreibweise
U = u eff = Û ⁄ ( 2 ) ; I = i eff = Î ⁄ ( 2 ) ist P = U ⋅ I ⋅ cos ϕ
9.2.4 Weitere Definitionen
Für die Bewertung sinusförmiger Vorgänge hat man weitere aus
Mittelwerten abgeleitete Merkmale definiert
x eff ⁄ x heißt Formfaktor
=x̂ ⁄ x eff heißt Scheitelfaktor
Seite 167
Seite 168
GET-Skript
9.3 Zeigerdarstellung
9.3.1 Drehzeiger
Sinusförmige Wechselvorgänge kann man auch durch Projektion
eines mit Winkelgeschwindigkeit (Kreisfrequenz) ω rotierenden
Drehzeigers der Länge  auf eine Bezugsachse beschreiben.
y
Bezugsachse
2π
ω = -----T
Â
α
x(t)
x
Ist zur Zeit t = 0 der Winkel α ( t = 0 ) = ϕ , so ist α ( t ) = ωt + ϕ
und die Projektion x(t) des Drehzeigers auf die x-Achse ist dann:
x ( t ) = Â ⋅ cos α = Â ⋅ cos ( ωt + ϕ )
Bei Projektion auf Bezugsachse y
y ( t ) = Â ⋅ sin α = Â ⋅ sin ( ωt + ϕ )
Weil sin α und cos α nur in der Phase verschoben sind, kann mit
geeignetem ϕ jeder sinusförmige Wechselvorgang auf einer beliebigen Bezugsachse dargestellt werden.
9.3.2 Zeigerdiagramm
Ein Wechselvorgang ist bei fester Kreisfrequenz ω durch Phase ϕ
und Amplitude  vollständig beschrieben, ebenso die Beziehungen zwischen Wechselvorgängen gleicher Kreisfrequenz.
Beispiel: Zwei sinusförmige Wechselvorgänge mit Amplituden
Aˆ1 bzw. Aˆ2 , gleicher Kreisfrequenz ω haben zur Zeit t = 0 den
Nullphasenwinkel ϕ 1 bzw. ϕ 2 , also
α 1 = ωt + ϕ 1 und α 2 = ωt + ϕ 2
Lineare Netze im eingeschwungenen Zustand
Drehzeiger
ϕ1-ϕ2
α1 α2
ω
x
Bei Drehung gegen den Uhrzeigersinn eilt Drehzeiger 1 dem
Drehzeiger 2 voraus um α 1 – α 2 = ϕ 1 – ϕ 2 = const. , d.h. die
Phasenbeziehung ist zeitlich konstant. Man kann also beide Drehzeiger in ihrer wechselseitigen Lage zu jedem beliebigen Zeitpunkt
betrachten, insbesondere auch zum Zeitpunkt t = 0.
Zeiger
ϕ1-ϕ2
ϕ1 ϕ2
x
Die zur Zeit t = 0 „eingefrorenen“ Drehzeiger nennt man „Zeiger“, das Diagramm heißt Zeigerdiagramm.
Merke:
Das Zeigerdiagramm enthält eine vollständige Beschreibung eines Wechselvorgangs.
Das Zeigerdiagramm erlaubt insbesondere graphische Addition
und Subtraktion von Wechselvorgängen. Dies ist einfacher als die
Addition phasenverschobener Sinusfunktionen und liefert anschauliche Ergebnisse.
Beispiel: Serienschaltung von zwei Wicklungen mit phasenverschobenen Spannungen Û 1, ϕ 1 , Û 2, ϕ 2 und gleicher Kreisfrequenz ω . Gesucht: Û , ϕ der Summenspannung
u = Û cos ( ωt + ϕ 1 ) + Uˆ 2 cos ( ωt + ϕ 2 ) = Û cos ( ωt + ϕ )
Zeichnerische Lösung
Seite 169
Seite 170
GET-Skript
u
u2
ϕ2
ϕ
ϕ1
u1
geometrische
Lösung
Bezugsachse
Man findet den Summenzeiger von u leicht durch Vektoraddition
der Zeiger von u1 und u2. Der Summenzeiger zeigt die gesuchte
Amplitude Û und den gesuchten Nullphasenwinkel ϕ .
Geometrische Lösung
- Aus dem Cosinussatz erhält man Û
ϕ2-ϕ1
ϕ
Û =
ˆ ⋅ Uˆ cos ( ϕ – ϕ )
Uˆ12 + Uˆ22 + 2U
1
2
2
1
- Aus Summe der Komponenten der Zeiger erhält man ϕ
ϕ1
ϕ2
u2sinϕ2
u1sinϕ1
u sinϕ
Û 1 sin ϕ 1 + Û 2 sin ϕ 2
tan ϕ = -------------------------------------------------Uˆ 1 cos ϕ 1 + Û 2 cos ϕ 2
Diese numerische Berechnung der zeichnerisch konstruierten Amplitude und Phase erlaubt einen Vergleich mit der formalen Addition der Wechselvorgänge.
u = Uˆ 1 cos ( ωt + ϕ 1 ) + Uˆ 2 cos ( ωt + ϕ 2 ) = Û cos ( ωt + ϕ )
Dabei zeigt sich, daß die Vektoraddition von Zeigern das gleiche
Ergebnis liefert. Eine einfache Begründung findet sich in 9.4.4.
Lineare Netze im eingeschwungenen Zustand
9.4 Darstellung sinusförmiger Vorgänge in der komplexen Ebene
Eine besonders leistungsfähige Beschreibung sinusförmier Wechselvorgänge ergibt sich bei der Darstellung von Drehzeigern und
Zeigern in der komplexen Ebene. Deshalb sollen die wichtigsten
Regeln für das Rechnen mit komplexen Zahlen hier kurz dargestellt werden.
9.4.1 Rechnen mit komplexen Zahlen
Im(z)
z=x+jy
jy
r
ϕ
x
Re(z)
Im rechtwinkligen Koordinatensystem
z = x + jy komplexe Zahl
x = Re ( z ) Realteil von z ; y = Im ( z ) Imaginärteil von z
z∗ = x – j y konjugiert komplex zu z
In Polarkoordinaten
z = z ( r, ϕ ) komplexe Zahl
2
2
r = z = + x + y Betrag von z
ϕ = atan ( y ⁄ x ) Phase, Argument von z
also: z = z ( r, ϕ ) = r cos ϕ + jr sin ϕ
Euler‘sche Formeln:
1 jϕ
1 jϕ – j ϕ
– jϕ
cos ϕ = --- ( e + e ) und sin ϕ = ----- ( e – e )
2
2j
e
jϕ
= cos ϕ + sin ϕ
Seite 171
Seite 172
GET-Skript
In Exponentialschreibweise
z = r⋅e
jϕ
jϕ
e hängt vom Phasenwinkel ϕ zur rellen Achse ab und heißt
Phasenfaktor.
Konjugiert komplexe Zahl in Exponentialdarstellung:
z* = r ⋅ e
– jϕ
Addition
Kartesisches System: z = z 1 + z 2 = ( x 1 + x 2 ) + j ( y 1 + y 2 )
graphisch: Vektoraddition
Exponentialdarstellung:
r 1 sin ϕ 1 + r 2 sin ϕ 2
r aus r 1 und r 2 mit Cosinussatz, tan ϕ = ---------------------------------------------r 1 cos ϕ 1 + r 2 cos ϕ 2
Subtraktion:
Kartesische Koordinaten: z = z 1 – z 2 = ( x 1 – x 2 )+ j ( y 1 – y 2 )
°
graphisch: Vektoraddition mit um 180 gedrehtem Vektor
Exponentialdarstellung: – r 2 ⋅ e
dann wie Addition
jϕ 2
= r2 ⋅ e
j ( ϕ2 + π )
Multiplikation:
Kartesische Koordinaten: Ausmultiplizieren
Exponentialdarstellung:
z = z1 ⋅ z2 = r 1 ⋅ e
jϕ 1
⋅ r2 ⋅ e
jϕ 2
= r1 ⋅ r2 ⋅ e
j ( ϕ1 + ϕ2 )
bildlich: Beträge multiplizieren, Phasen addieren.
Lineare Netze im eingeschwungenen Zustand
Seite 173
Division:
Kartesische Koordinaten: Mühselig
Exponentialdarstellung:
jϕ 1
r 1 j ( ϕ1 – ϕ2 )
r1e
z = z ⁄ z = ------------------ = ----- ⋅ e
1 2
jϕ 2 r 2
r2e
bildlich: Beträge dividieren, Phasen subtrahieren.
Wichtige Werkzeuge:
Re e
j ( ωt + ϕ )
*
2
= cos ( ωt + ϕ )
*
z⋅z = r ; z⁄z = e
e
j⋅0
= 1; e
jπ ⁄ 2
j ⋅ 2ϕ
= j; e
– jπ ⁄ 2
= –j; e
jπ
= e
– jπ
= –1
9.4.2 Komplexe Schwingung, komplexe Amplitude
Im(a)
a = Â ⋅ e
j ( ωt + ϕ )
= Â ⋅ e
jϕ
2π
ω = -----T
a
α=ωt+ϕ
Â
α
Re(a)
⋅e
jωt
Die komplexe Größe a ist in Pfeilspitze eines mit Kreisfrequenz
ω rotierenden Drehzeiger in der komplexen Ebene.
Projektion des Drehzeigers a auf die reelle Bezugsachse:
Re ( a ) = Â ⋅ cos ( ωt + ϕ ) ist cosinusförmige Wechselgröße.
Projektion des Drehzeigers a auf die imaginäre Bezugsachse:
Im ( a ) = Â ⋅ sin ( ωt + ϕ ) ist sinusförmige Wechselgröße. (vorwiegend in der Energietechnik)
Durch Projektion der komplexen Schwingung a kann also jeder
sinusförmige Wechselvorgang dargestellt werden wie durch Projektion reeller Drehzeiger.
Seite 174
GET-Skript
Wie bei reellen Drehzeigern erhält man durch Einfrieren zur Zeit
t = 0 einen Zeiger.
a ( t = 0 ) = Â = Â ⋅ e
jϕ
Dieser Zeiger in der komplexen Ebene  liefert wie ein reeller
Zeiger vollständige Information hinsichtlich Phase und Amplijϕ
tude.( Â beschreibt nur Amplitude, e nur die Phase). Also:
 =  ⋅ e
a = Â ⋅ e
jϕ
jωt
Komplexe Amplitude
Komplexe Schwingung
a = Re ( a ) Wechselvorgang
9.4.3 Rechenvorteile bei komplexer Schreibweise
Wechselspannungen, Wechselströme und daraus abgeleitete Größen sind reele Größen und Verknüpfungen dieser Größen über
mathematische Operationen müssen aus physikalischen Gründen
im Reellen durchgeführt werden, liefern also reelle Ergebnisse
(rechte Spalte).
Jedem Wechselvorgang ist aber eindeutig eine komplexe Schwinjωt
gung a = Â ⋅ e
zugeordnet (Pfeil nach links), aus der umgekehrt durch Berechnung des Realteils der Wechselvorgang
a = Â cos ( ωt + ϕ ) hervorgeht (Pfeil nach rechts).
Für die Operationen Addtion, Subtraktion, Multiplikation mit reellen Konstanten, Differentiation und Integration und bei linearen
Netzen kann man zeigen, daß man das gleiche reelle Ergebnis erhält, wenn man die Operationen auf die komplexen Schwingungen,
letztlich sogar auf die komplexen Amplituden (vgl. graph. Addition
von Zeigern) anwendet (linke Spalte) und aus dem komplexen Ergebnis das reelle Ergebnis abliest.
a = Âe
jωt
←
Addieren, Subtrahieren
Multiplizieren mit Konstante
Differenzieren, Integrieren
komplexes Ergebnis
→
a = Â cos ( ωt + ϕ )
Addiieren, Subtrahieren
Multiplizieren mit Konstante
Differenzieren, Integrieren
reelles Ergebnis
Lineare Netze im eingeschwungenen Zustand
Seite 175
Bei der Berechnung linearer Netze beschränken sich die Operationen auf die Kirchhoff‘schen Regeln und die Zweipolgleichungen
∑ uk
= 0;
k
∑ ik
= 0
k
u = R ⋅ i , u = Ldi ⁄ dt ; i = Cdu ⁄ dt bzw. Integrale darüber.
Man benötigt also genau die Rechenoperation, für die man im
Komplexen rechnen darf. Dies wird auch in der E-Technik häufig
benutzt. Wir beschränken uns hingegen auf die Betrachtung der
Realteile der komplexen Schwingung und leiten daraus weitere Ergebnisse ab.
9.4.4 Neue Beschreibung sinusförmiger Wechselgrößen
Es ist gleichwertig zu schreiben
a(t) = Â cos ( ωt + ϕ ) und
a(t) = Re  ⋅ e
j ( ωt + ϕ )
jϕ jωt
= Re  ⋅ e e
= Re  ⋅ e
jωt
Für die Addition zweier Signale a1(t) und a2(t) gleicher Frequenz
zu a(t) gilt dann
a 1(t) + a 2(t) = a(t)
= Re  1 ⋅ e
jωt
+ Re  2 ⋅ e
jωt
= Re  ⋅ e
jωt
= Re ( Â 1 + Â 2 ) ⋅ e
jωt
oder  =  1 +  2 Zeigeraddition,
jωt
wobei  =  ⋅ e
Phase ϕ und Amplitude  des Summensignals a(t) beschreibt.
Beim Differenzieren eines Signals a(t) erhält man
jωt
d
d
d ( t ) = ----- a ( t ) = ----- Re ( Â ⋅ e )
dt
dt
= Re ( jω ⋅ Â ⋅ e
jωt
) = ReD̂ ⋅ e
jωt
oder D̂ = jω Â .
Der Zeiger D̂ des differenzierten Signals ist um π ⁄ 2 gegenüber
dem Zeiger  vorgedreht und seine Länge ändert sich um den
Faktor ω .
Bei der Integration eines Signals a(t) erhält man
Seite 176
GET-Skript
i(t ) =
∫ a ( t ) dt
= Re ∫ Âe
jωt
1
jωt
jωt
dt = Re ------ Âe
= Re ∫ Î e dt
jω
1
oder Î = ------ Â .
jω
Der Zeiger Î des integrierten Signals ist um π ⁄ 2 gegenüber dem
Zeiger  zurückgedreht und seine Länge teilt sich durch ω .
Man kann also aus der komplexen Amplitude  eines Wechselvorgangs die komplexe Amplitude D̂ des differenzierten Wechselvorgangs bzw. die komplexe Amplitude Î des integrierten Wechselvorgangs direkt ablesen.
da
d = -----dt
jIm
a
Re
i =
∫ a dt
Lineare Netze im eingeschwungenen Zustand
9.5 Ideale Schaltelemente im Wechselstromkreis
Die Darstellung von Wechselvorgängen im Komplexen bringt
auch neue Aussagen über den Zusammenhang zwischen den
komplexen Amplituden von Strom und Spannung an den Zweipolen R, L und C.
9.5.1 Der ohm‘sche Widerstand
Es gilt:
u R ( t ) = R ⋅ i R(t) , also
ReÛ R e
jωt
= R ⋅ Re Î R e
jωt
= ReRÎ R e
jωt
durch Vergleich folgt dann Û R = R ⋅ Î R
oder Û R ⋅ e
jϕ u
= R ⋅ Î R ⋅ e
jϕ i
also Û R = R ⋅ Î R und ϕ u = ϕ i .
j Im
Û R
Î R
ϕi=ϕu=ϕ
Re
Die Zeiger Î R und UˆR sind in Phase. Aus dem Strom-Zeiger wird
durch Multiplikation mit dem Widerstand ein Spannungs-Zeiger,
sodaß die Achsen wegen [ u ] ≠ [ i ] doppelt beschriftet werden
müssen (eigentlich zwei Diagramme).
9.5.2 Die Induktivität
Es gilt:
d
u L ( t ) = L ⋅ ----- i L ( t ) , also
dt
ReÛ L e
jωt
= Re jωLÎ L e
jωt
durch Vergleich erhält man Û L = jωL ⋅ Î L
Seite 177
Seite 178
GET-Skript
oder Û L ⋅ e
jϕ u
= jω ⋅ LÎ L ⋅ e
= ω ⋅ LÎ L ⋅ e
jϕ i
= ω ⋅ LÎ L ⋅ e
jϕ i
⋅e
jπ ⁄ 2
j ( ϕi + π ⁄ 2 )
also Û L = jωL ⋅ Î L und ϕ u = ϕ i + π ⁄ 2 .
j Im
Î L
Û L
Re
Multiplikation von Î L mit ωL ergibt Streckung und Multiplikation
mit j gibt Drehung um π ⁄ 2 . Der Zeiger Û L der Spannung an einer Induktivität ist gegenüber dem Zeiger Î L des Stroms um π ⁄ 2
vorgedreht.
Definition: X L = ωL Induktiver Blindenwiderstand
Damit schreibt sich die Beziehung zwischen Strom und Spannung
an einer Induktivität als
Û L = j ⋅ X L ⋅ Î L (Formal wie Ohm‘sches Gesetz)
9.5.3 Der Kondensator
Es gilt:
d
i C ( t ) = C ⋅ ----- ⋅ u C ( t ) also
dt
ReÎ C e
jωt
= Re jωCÛ C e
jωt
und durch Vergleich Î C = jωC ⋅ Û C
oder Î C ⋅ e
jϕ i
= jω ⋅ CÛ C ⋅ e
= ω ⋅ CÛ C ⋅ e
jϕ u
= ω ⋅ CÛ C ⋅ e
j ( ϕu + π ⁄ 2 )
1
also Û c = -------- ⋅ Î c und ϕ u = ϕ i – π ⁄ 2 .
ωC
jϕ u
⋅e
jπ ⁄ 2
Lineare Netze im eingeschwungenen Zustand
j Im
Î C
Re
Û C
Der Zeiger Û c der Spannung an einem Kondensator ist gegenüber
dem Zeiger Î c des Stroms um π ⁄ 2 zurückgedreht. Division von
Î c durch ωC gibt Verkürzung und Division mit j gibt Drehung
um – π ⁄ 2 .
1
Definition: X c = - -------- Kapazitiver Blindwiderstand
ωC
Damit schreibt sich die Beziehung zwischen Spannung und Strom
an einer Kapazität
Û c = j ⋅ X c ⋅ Î c (formal wie Ohm‘sches Gesetz)
9.5.4 Frequenzabhängige Widerstände
In komplexer Schreibweise ist
Û
Û
Û
1
1
R = ------R- ; jX L = jωL = ------L- ; jX c = j - -------- = ----------- = ------c
ωC
jωC
Î R
Î L
Î c
Während also R wie im Gleichstromfall konstant ist, ändert sich
der induktive Blindwiderstand X L = ωL und der kapazitive
Blindwiderstand X c = 1 ⁄ ( ωC ) mit der Kreisfrequenz ω .
XL
XC
R
ω
Seite 179
Seite 180
GET-Skript
9.6 Netzwerke aus komplexen Widerständen
9.6.1 Komplexer Widerstand und komplexer Leitwert
Maschengleichung für Wechselstromkreis
Û R + Û L + Û c – Û = 0
Î
Û
R
L
Û R
Û L
C
Û C
Wegen Serienschaltung ist Î = Î R = Î L = Î C , also
1
1
Û = R ⋅ Î + jωL ⋅ Î + ----------- ⋅ Î = R + jωL + ----------- ⋅ Î
jωC
jωC
Man erhält (wie gezeigt) die komplexe Amplituden Û auch durch
vektorielles Addieren als graphische Lösung. .
jIm ( Û , Î )
Û C Û L
Û
Î
Û R Re ( Û , Î )
Zur Vereinfachung wählt man ϕ i = 0 . Man beachte den unterschiedlichen Maßstab für Strom und Spannung. Alle Spannungen
sind in Betrag und Phase ablesbar. Man kann schreiben
1
Z = R + jωL + ----------- und Û = Z ⋅ Î (formal wie U = R ⋅ I )
jωC
oder auch
Û
U
Z = ---- = ---- ( U , I Effektivwert)
I
Î
oder
1
Z = R + j ωL – -------- = R + jX L + jX C = R + jX
ωC
mit
1
X L = ωL , X c = - -------- , X = X L + X c
ωC
Lineare Netze im eingeschwungenen Zustand
Nomenklatur:
Z
Impedanz, komplexer Widerstand, Scheinwiderstand
R
Resistanz, ohm‘scher Widerstand, Wirkwiderstand,
XL
Induktiver Blindwiderstand
Xc
Kapazitiver Blindwiderstand
X
Reaktanz, Blindwiderstand
induktiv für X > 0
Blindwiders tan d X ist
kapazitiv f ür X < 0
Auflösung der Gleichung Û = Z ⋅ Î nach Î ergibt
1
Î = --- ⋅ Û oder Î = Y ⋅ Û
Z
1
mit --- = Y = G + jB
Z
Nomenklatur:
Y
Admittanz, komplexer Leitwert, Scheinleitwert
G
Konduktanz, Wirkleitwert
B
Suszeptanz, Blindleitwert
Aus der graphischen Lösung läßt sich ablesen:
Û
U
Z = ---- = ---- =
I
Î
2
2
X
R + X und arg ( Z ) = ϕ u – ϕ i = atan ---R
Î
I
1
X
Y = ---- = ---- = ----------------------- und arg ( Y ) = ϕ i – ϕ u = – atan ---U
R
2
2
Û
R +X
Seite 181
Seite 182
GET-Skript
9.6.2 Serien- und Parallelschaltung komplexer Widerstände
Reihenschaltung: Z 1 Z 2 ... Z n
n
n
Û =
∑ Û i und Û i
∑ Z i = Î ⋅ Z
= Z i ⋅ Î also Û = Î ⋅
i=1
i=1
n
wobei Z =
∑ Z i , also
i=1
Gesamtimpedanz = Summe der Teilimpedanzen
Parallelschaltung: Y 1, Y 2 ... Y n
n
n
Î =
∑ Î i und Î i
= Y i ⋅ Û also Î = Û ⋅
∑ Yi
= Û ⋅ Y
i=1
i=1
n
wobei Y =
∑ Y i , also
i=1
Gesamtadmittanz = Summe der Teiladmittanzen
Zerlegung einer Impedanz Z
Î
als Reihenschaltung
Û
Z
Î
R
Û R
jX
Û X
Û
Man zerlegt in eine Reihenschaltung von Resistanz mit Wirkspannung Û R und Reaktanz mit Blindspannung Û X
jIm ( Û , Î )
Û
Û X
Û R
Î
Re ( Û , Î )
Lineare Netze im eingeschwungenen Zustand
Seite 183
Zerlegung einer Admittanz Y
Î
Î
als Parallelschaltung
Û
Y
Û
Î B
Î G
G
jB
Man zerlegt in eine Parallelschaltung von Konduktanz mit Wirkstrom Î G und Suszeptanz mit Blindstrom Î B
jIm ( Û , Î )
Î
Î B
Î G
Û
Re ( Û , Î )
Ersatzquellen
Zur Berechnung größerer Netzwerke aus R, L, C ist Darstellung
des allgemeinen Zweiges k erforderlich, der aus Impedanz Z k ,
bzw. Admittanz Y k und einer Wechselspannungsquelle Û 0k bzw.
einer Wechselstromquelle Î 0k besteht.
Für Spannungsquelle: Û k = Z k ⋅ Î k + Û 0k
Û k
Î k
Zk
Û 0k
Für Stromquelle: Î k = Y k ⋅ Û k + Î 0k
Û k
Î k
Yk
Î 0k
Für Zweig ohne Quellen ( Û 0k = Î 0k = 0 )
Û k = Ẑ k ⋅ Î k bzw. Î k = Y k ⋅ Û k
Seite 184
GET-Skript
D.h. für lineare Netze im eingeschwungenen Zustand gelten gleiche Zweipolgleichungen wie bei Netzwerken mit Gleichstrom.
Es wurde bereits gezeigt, daß auch die Kirchhoff‘schen Regeln
wie im Gleichstromfall weiterhin gelten.
Damit sind alle Voraussetzungen gegeben, die bei der Erstellung
von Netzwerksanalyseverfahren im Gleichstromfall verwendet
wurden. Die Analyseverfahren sind also (unter Verwendung der
komplexen Schreibweise) weiterhin gültig und auf Wechselstromnetze übertragbar.
9.7 Ortskurven
Bisher: Komplexe Darstellung von Schaltungen mit festen Werten
von R, L, C und festem ω .
Jetzt: Funktionale Abhängigkeit einer komplexen Größe von der
Größe einer Variablen, z. B.
- Impedanz als Funktion der Frequenz: Z = Z ( ω )
- Admittanz als Funktion der Werte eines Schaltelementes:
Y = Y ( R ) ; Y = Y ( L ) oder Y = Y ( C )
Bei reellen Darstellungen ist Funktionsdarstellung als Graph üblich, z.B.
1
X c = X c ( ω ) = - -------ωC
XC
ω
Wollte man auf gleiche Weise eine komplexe Größe darstellen,
z.B. Z = R + jX ( ω ) = Z ( ω ) , so wäre eine dritte Dimension nötig (1. Achse für ω , 2. Achse für R , 3. Achse für jX ). Eine solche
Darstellung ist auf Papier ungünstig.
Man bleibt deshalb bei zweidimensionalen Darstellungen und
trägt nur die Ergebnisse in der komplexen Ebene auf. Da für benachbarte Werte der unabhängigen Variablen auch die Ergebnisse
Lineare Netze im eingeschwungenen Zustand
i.A. benachbart sind ist der geometrische Ort aller Ergebnisse eine
glatte Kurve, die sog. Ortskurve. Es genügt deshalb einige Ergebnisse zu berechnen, sie zu verbinden und so die Ortskurve zu
zeichnen. Um zu kennzeichnen, welcher Punkt der Ortskurve zu
welchem Wert der unabhängigen Variablen gehört, schreibt man
deren Wert an einige wichtige Punkte der Ortskurve.
Ist das komplexe Ergebnis, z.B. Z , Y , Û , Î eine linear gebrochen
rationale Funktion der unabhängigen Variablen, z.B. von
ω, R, L, C , so ist die Ortskurve immer ein Kreis. Dabei ist zu beachten, daß auch eine Gerade als Kreis gilt (Grenzfall für Radius
r → ∞ ).
- Alle Abhängigkeiten der Größen Z , Y , Û , Î von den Größen
der Schaltelemente R, L, C sind linear gebrochen rationale
Funktionen, also Ortkurven stets Abschnitte von Kreisen oder
Geraden.
- Aber: Die Abhängigkeit der Größen Z , Y , Û , Î von der Frequenz sind nur in einfachen Fällen linear gebrochen rational,
also im allgemeinen kein Kreis.
Beispiele für Ortskurven:
Impedanz einer Serienschaltung von R und L
Z = Z ( ω ) = R + jωL
jIm (Z)
Z(ω)
ω
ω=0
Re (Z)
R
Impedanz einer Serienschaltung von R und C
j
Z = Z ( ω ) = R – -------ωC
jIm (Z)
Re (Z)
R
ω→∞
Z(ω)
ω
Seite 185
Seite 186
GET-Skript
Impedanz einer Serienschaltung von R, L und C
1
Z = Z ( ω ) = R + j ωL – --------
ωC
jIm (Z)
ω
Z(ω)
ω0
R
Re (Z)
ω
Eine wichtige Rolle spielt die Frequenz ω = ω 0 = 1 ⁄ LC ,
bei der ωL = 1 ⁄ ( ωC ) , also Im ( Z ) = 0 ist.
Admittanz einer Serienschaltung von R und L
Y ( ω ) = 1 ⁄ ( R + jωL )
Man kann entweder die Werte von Y ( ω ) direkt berechnen und die
Ortskurve zeichnen, oder die Beziehung Y ( ω ) = 1 ⁄ Z ( ω ) nutzen, um die Ortskurve der Admittanz aus der bekannten Ortskurve
für die Impedanz zu konstruieren. Weil
Z = Z ( ω ) = R + jωL = Z ⋅ e
jϕ
1
- jϕ
, ist Y = ------ ⋅ e , also
Z
Y = 1 ⁄ Z und ϕ Y = -ϕ Z ;
Damit läßt sich aus einem Punkt Z , ϕ Z in der Impedanz-Ebene
der zugehörige Punkt Y , ϕ Y in der Admittanz-Ebene konstruieren. Weil Y ( ω ) eine linear gebrochen rationale Funktion ist, muß
die Ortskurve ein Kreis-Stück sein und es gilt:
- Z reell → Y reell
1
- Z = R ist kleinstes Z → , also Y = --- ist größtes Y
R
- Z → ∞ ergibt Y = 0
- Punkte der Ortskurve mit ω = 0 und ω → ∞ müssen auf der
reellen Achse (einschließlich unendlich fernem Punkt!) liegen.
Lineare Netze im eingeschwungenen Zustand
- Tangente bei Im ( Y ) = 0 und bei Re ( Y ) = G
steht ⊥ zur reellen Achse
- Punkt G ⁄ 2 ist Kreismittelpunkt.
Zu einer vollständigen Ortskurve gehört die Beschriftung mit einigen Werten der unabhängigen Variablen (z.B. ω = 0 , ω → ∞ )
jIm(Y)
G ω=0
Re(Y)
Y(ω)
ω
ω→∞
Ähnlich können auch folgende Ortskurven konstruiert werden:
Admittanz einer Serienschaltung von R und C
jIm(Y)
ω
ω→∞
Y(ω)
ω=0
G
Re(Y)
Admittanz einer Serienschaltung von R, L und C
jIm(Y)
ω=0
ω
Y(ω)
G
ω→∞
ω
ω0 Re(Y)
Seite 187
Seite 188
GET-Skript
Weiteres Beispiel:
Admittanz der Parallelschaltung zweier RC -Serienschaltungen
R1
C1
R2
C2
j
j
- Bestimme Z 1 ( ω ) = R 1 – ----------- ; Z 2 ( ω ) = R 2 – ----------ωC 1
ωC 2
1
1
- Daraus Y 1 ( ω ) = --------------- , Y 2 ( ω ) = --------------Z 1(ω)
Z 2(ω)
- Aus den Ortskurven für Y 1 ( ω ) und Y 2 ( ω ) Konstruktion der
Ortskurve Y ( ω ) = Y 1 ( ω ) + Y 2 ( ω ) durch punktweise (vektorielle) Addition
Y (ω)
jIm(Y)
ω
5 10
10
25
1
Y 1(ω)
Y 2(ω) + G 1
ω→∞
Re(Y)
Lineare Netze im eingeschwungenen Zustand
Seite 189
9.8 Wechselstrommeßbrücken
Z1
U0
C
Z2
U CD
Z3
D
Z4
Z
Z
U CD = 0 wenn -----1- = -----3- oder Z 1 Z 4 = Z 2 Z 3
Z2
Z4
Aufgabe der Meßbrücke
Z 1 sei unbekannt. Mit Änderung einer der Impedanzen Z 2, Z 3, Z 4
Gleichgewicht U CD = 0 herstellen (Abgleich) und aus Z 2, Z 3, Z 4
das Unbekannte Z 1 bestimmen.
Weil U C in Betrag und Phase mit U D übereinstimmen muß, muß
beim Abgleich Realteil ( R ) und Imaginärteil ( X ) einer der bekannten Impedanzen eingestellt werden.
Bei Abgleich ( U CD = 0 ) ist:
Z2
Z 1 = --------- ⋅ Z 3 und ϕ 1 = ϕ 2 + ϕ 3 – ϕ 4
Z4
Häufig vereinfacht man durch: Z 2 = R 2 und Z 3 = R 3 . Dann erhält man die Abgleichbedingung
R2 R3
und ϕ 1 = – ϕ 4 .
Z 1 = -----------Z4
Wegen ϕ 1 = – ϕ 4 muß Z 4 kapazitiv sein, wenn Z 1 induktiv ist
(und umgekehrt)
Seite 190
GET-Skript
9.8.1 Maxwellbrücke ( Z ind )
unbekannt
L1
R2
R1
U0
R3
C4
R4
j
Hier ist Z 4 = R 4 || ----------ωC 4
Es gilt:
ωL
ϕ 1 = arg ( Z 1 ) = atan ---------1- und
R1
ωC
ϕ 4 = arg ( Z 4 ) = – arg ( Y 4 ) = – atan ----------4G4
ωL
ωC
Wegen ϕ 1 = – ϕ 4 gilt atan ---------1- = atan ----------4- = atan ωC 4 R 4
R1
G4
ωL
ωC
L
Durch Vergleich: ---------1- = ----------4- oder -----1- = C 4 R 4
R1
G4
R1
Für die Beträge gilt: Z 1 ⋅ Z 4 = R 2 ⋅ R 3 oder
R 1 + jωL 1
1 + jω ( L 1 ⁄ R 1 )
- = R 1 R 4 -----------------------------------R 2 ⋅ R 3 = ---------------------------1
1 + jω ( C 4 R 4 )
------ + jωC 4
R4
L
Bei Abgleich ist wegen -----1- = C 4 ⋅ R 4 (s. o.) der Quotient auf der
R
rechten Seite = 1 , also 1
R2 ⋅ R
R 1 = ----------------3 und L 1 = C 4 R 4 R 1 = C 4 R 4 R 2 R 3 ⁄ R 4 = C 4 R 2 R 3
R4
Damit lautet die Abgleichbedingung für die Maxwell-Brücke
R2 R3
R 1 = ------------ ; L 1 = C 4 R 2 R 3
R4
Der Abgleich ist unabhängig von der Betriebsspannung und unabhängig von ω .
Lineare Netze im eingeschwungenen Zustand
Seite 191
9.8.2 Frequenzmeßbrücke nach Wien-Robinson ( ω )
C1
R1
U0,ω
R2
R3
C3
R4
Hier wählt man Z 2 = R 2 , und Z 4 = R 4
R 1 und R 3 sind einstellbar. Es gilt:
1
ϕ 1 = arg ( Z 1 ) = – arg ------ = – atan ( R 1 ωC 1 )
Z 1
1
ϕ 3 = arg ( Z 3 ) = – atan ----------------ωC 3 R 3
2
1
Wegen ϕ 1 = ϕ 3 → ωR 1 C 1 = ----------------- also ω R 1 R 3 C 1 C 3 = 1
ωC 3 R 3
Für die Beträge gilt:
Z3
R
R 3 + 1 ⁄ ( jωC 3 )
( R 3 jωC 3 + 1 ) ( 1 + R 1 jωC 1 )
-----4- = -------- = ---------------------------------------- = ----------------------------------------------------------------------R2
Z1
1
jωC 3 ⋅ R 1
--------------------------------1 ⁄ R 1 + jωC 1
2
1 + jωR 1 C 1 + jωR 3 C 3 – ω R 1 R 3 C 1 C 3
= -------------------------------------------------------------------------------------------------R 1 jωC 3
jω ( C 3 R 3 + C 1 R 1 )
= ----------------------------------------------= R3 ⁄ R1 + C 1 ⁄ C 3
R 1 jωC 3
Mit R 1 = R 3 = R (Tandempotentiometer) und C 1 = C 3 fest
vereinfacht sich das Ergebnis weiter zu
R 4 ⁄ R 2 = R 3 ⁄ R 1 + C 1 ⁄ C 3 = 2 und es wird R 4 = 2R 2
2
2
2
Mit dieser Beschaltung ist ω = 1 ⁄ ( R 1 R 3 C 1 C 3 ) = 1 ⁄ ( R C )
d.h. man kann mit der Wien-Robinson-Brücke ω bestimmen zu
1
ω = -------RC
Seite 192
GET-Skript
9.9 Schwingkreise
Ortskurve für Serienschaltung R, L, C zeigte: Z hat Minimum bei
1
Z = R , d.h. bei -------- = ωL und damit bei der Frequenz
ωC
ω 0 = 1 ⁄ LC .
Mit dieser Frequenz ω 0 würde bei geschlossenem Kreis die Energie vom Kondensator zur Spule pendeln und dabei im Laufe der
Zeit vom Widerstand R in Wärme umgesetzt werden.
I
R
L
UR
UL
1
C
UC
U
2
Diese Schaltung kann also mit Frequenz ω 0 freie Schwingungen
ausführen und heißt Serienschwingkreis.
Wegen der Energieverluste im Widerstand wird die Amplitude mit
der Zeit kleiner (gedämpfte Schwingung). Man kann diese
Schwingungen nicht mit den von uns betrachteten Mitteln der
komplexen Schreibweise analysieren, weil der Zeiger im Verlauf
der Zeit seine Länge ändern würde. Wir benutzen deshalb einen
reellen Ansatz mit Differentialgleichungen. Um die Lösung zu
vereinfachen, betrachten wir zunächst einen Schwingkreis ohne
Energieverlust (R = 0).
Einfacher Kreis mit Induktivität und Kapazität
uL
L
C
uC
Der Kondensator sei aufgeladen auf u c = U 0 . Bei t = 0 wird der
Schalter geschlossen. Dann gilt
di
u L + u C = 0 oder L ----- + u C = 0
dt
Nach beidseitiger Division durch L und Ableiten nach t gilt
2
du
1
i
d i
------2- + ------- ⋅ i = 0 mit --------C- = ---LC
dt
C
dt
Lineare Netze im eingeschwungenen Zustand
Diese Differentialgleichung beschreibt den harmonischen Oszillator. Lösungen sind: i 1 ( t ) = k 1 ⋅ cos ω 0 t ; i 2 ( t ) = k 2 ⋅ sin ω 0 t
Beweis: zweimal differenzieren:
2
2
d i1
d i
2 k cos ω t = – ω 2 i ähnlich ---------2- = – ω 2 ⋅ i
--------=
–
ω
0
1
0
0
1
0 2
2
2
dt
dt
Einsetzen in Dgl. des harmonischen Oszillators:
1
1
1
– ω 02 i 1, 2 + ------- ⋅ i 1, 2 = 0 oder ω 02 = ------- bzw. ω 0 = --------------LC
LC
± LC
Also Lösung allgemein: i ( t ) = k 1 cos ω 0 t + k 2 sin ω 0 t
Anfangsbedingungen: i ( 0 ) = 0 ; u C ( 0 ) = U 0
di
also L ----dt
= –U 0 → k 1 = 0
t=0
d
und L ----- ( k 2 sin ω 0 t )
dt
t=0
= –U 0
also Lω 0 k 2 = – U 0
–U
C
→ k 2 = ---------0- = – U 0 ⋅ ---ω0 L
L
Endgültige Lösung für die obige spezielle Schaltung:
C
i ( t ) = – U 0 ---- ⋅ sin ω 0 t
L
di
u c ( t ) = – L ----- = U 0 ⋅ cos ω 0 t
dt
Energiebetrachtung:
1
1
2
W E = --- Cu c2 = --- CU 02 ⋅ cos ω 0 t
2
2
1 2
1
2
W M = --- Li = --- CU 02 ⋅ sin ω 0 t
2
2
1
1
2
2
W E + W M = --- ⋅ CU 02 ( cos ω 0 t + sin ω 0 t ) = --- CU 02
2
2
Ergebnis:
Die Summe der Energie ist also konstant und gleich der ursprünglichen Energie auf Kondensator. Zu bestimmten Zeitpunkten ist
diese Energie nur in C oder nur in L. Die freien Schwingungen sind
sinusförmig.
Seite 193
Seite 194
GET-Skript
Erzwungene Schwingungen
Mit einer Quelle der Frequenz ω zwischen Klemme 1 und 2 werden Schwingungen der beliebigen Frequenz ω erzwungen.
Auch bei erzwungenen Schwingungen ist Z = Z ( ω 0 ) die kleinste
Impedanz und somit hat die Schwingungsamplitude bei ω 0 ein
Maximum (Resonanz)
Resonanz:
Ein schwingungsfähiges System wird mit der Frequenz ω 0 erregt,
bei der es (ohne Quelle) freie Schwingungen ausführen würde. Als
Resonanzfrequenz bezeichnet man
ω
1
f 0 = -----0- = ------------------2π
2π LC
a) Serienschwingkreis bei Resonanz:
jIm
U = UR
UC
UL
Î
Re
U L + U C = 0 und damit X 0 = 0
Quelle deckt nur Verluste in R . Mit R = 0 bleibt W ja konstant
und schwingt von L ↔ C (s.o.)
Bei festem U der Spannungsquelle ist I = U ⁄ R groß bei kleinem R .
Spannung an L, C wird bestimmt durch:
1
LC
ω 0 L = ----------- = ------------ =
ω0 C
C
L
---- = Z 0
C
Z 0 heißt Kennwiderstand.
Das Verhältnis Q = U L ⁄ U = U C ⁄ U heißt Güte des Schwingkreises.
U
I⋅Z
Z
ω0 L
1
Q = ------L- = ------------0- = -----0- = --------- = --------------U
I⋅R
R
R
RCω 0
Lineare Netze im eingeschwungenen Zustand
Seite 195
b) Serienschwingkreis außerhalb der Resonanz:
Bei beliebigem ω ist
1
ω ω
Z = R + j ω ⋅ L – -------- = R + jZ 0 ⋅ ------ – -----0-
ωC
ω0 ω
ω ω
= R ⋅ 1 + jQ ⋅ ------ – -----0-
ω0 ω
Definitionen:
ω
f
------ = ----- = ν
f0
ω0
ω ω
------ – -----0- = v
ω0 ω
1
---- = d
Q
Q⋅v = Ω
normierte Frequenz ( ν = 1 bei Resonanz)
Verstimmung
Dämpfungsfaktor
normierte Verstimmung
In dieser Schreibweise ist:
Z = R ⋅ [ 1 + jQ ⋅ v ] = R ⋅ [ 1 + jΩ ] oder
Z
--- = 1 + jΩ
R
Resonanzkurven
Hat die Quelle feste Spannung und frei wählbare Frequenz ω , so
läßt sich aus den obigen Beziehungen für Z = Z ( ω ) , Z = Z ( v )
und Z = Z ( Ω ) auch der Strom I = I ( ω ) , I = I ( v ) und
I = I ( Ω ) als Funktion der Frequenz berechnen. Man kann sowohl die Beträge des Stroms, als auch die Phase des Stroms über
den Variablen ω, v oder Ω auftragen und erhält die sog. Resonanzkurven. Hier: Betrachtung der Effektivwerte I mit Betrag I.
I
für alle U
ω0
ω
Seite 196
GET-Skript
I (ω) = U ⁄ Z (ω)
Auch bei festem Q, ω 0 erhält man unterschiedliche Kurven für
unterschiedliche Quellspannungen U
Deshalb Normierung auf I ⁄ I 0
I
---I0
1
für alle ω0
ω
Z ( ω0 ) U
Z ( ω0 )
I (ω)
I (ω)
Weil ----------- = -------------- = --------------- ⋅ ------------- = -------------- , erhält man
U
Z (ω)
I ( ω0 )
I0
Z (ω)
bei festem Q unterschiedliche Kurven für unterschiedliche ω 0
ω
Deshalb Normierung auf ------ = ν
ω0
I
---I0
1
Q groß
Q klein
ν
ν1 ν=1 ν2
Man erhält immer noch unterschiedliche Kurven für unterschiedliche Werte von Q.
1
Deshalb Auftragen über Ω = ν – --- ⋅ Q
ν
I
---I0 1
−1
I
1
---- = ------I0
2
+1
Ω
Bei Darstellung von I ⁄ I 0 = f ( Ω ) gilt gleiche Kurve I ⁄ I 0 für
- alle Spannungen U
- alle Resonanzfrequenzen ω 0
- alle Kreisgüten Q
Lineare Netze im eingeschwungenen Zustand
Diese Darstellung ist symmetrische zu Resonanz bei Ω = 0
1
I ⁄ I 0 = Z ( ω 0 ) ⁄ Z ( ω ) = 1 ⁄ 1 + jQ ν – --- oder
ν
1
I ⁄ I 0 = ---------------1 + jΩ
ν
Ω
I ⁄ I0
0
–∞
0
ν1
–1
1⁄ 2
ν0
0
1
ν2
+1
1⁄ 2
+∞
+∞
0
Bei ν = ν 1 und ν = ν 2 ist U = U C = U L
Bandbreite B = f 2 – f 1 ist die Breite der Resonanzkurve zwischen den Stellen f 1 und f 2 , bei der das Verhältnis
I ⁄ I 0 = 1 ⁄ 2 ist.
1
I
1
---- = -------------------- = ------- oder Ω = ± 1
I0
2
2
1+Ω
Für große Q (schmale Resonanzkurven) gilt näherungsweise in
der Umgebung ν ≈ 1
2
ν –1
(ν + 1) ⋅ (ν – 1)
1
Ω = Q ⋅ ν – --- = Q ⋅ -------------- = Q ⋅ -------------------------------------
ν
ν
ν
bei ν ≈ 1 ist ( ν + 1 ) ≈ 2 und 1 ⁄ ν ≈ 1 , also Ω = 2Q ⋅ ( ν – 1 )
Die Frequenzen ν 1, ν 2 bei denen Ω = ± 1 ist erhält man aus
1
+1 ≈ 2Q ⋅ ( ν 2 – 1 ) zu ν 2 ≈ ------- + 1
2Q
1
– 1 ≈ 2Q ⋅ ( ν 1 – 1 ) zu ν 1 ≈ – ------- + 1 und
2Q
f2 – f1
B
ν 2 – ν 1 = ----------------= ----f0
f0
B ⁄ f 0 = ν 2 – ν 1 heißt auch Normierte Bandbreite
Seite 197
Seite 198
GET-Skript
Phasenverlauf
I ⁄ I0 = f (ν)
Anstelle
von
kann
man
auch
atan ( I ⁄ I 0 ) = atan ( I ⁄ I 0 ) = f ( ν ) auftragen und erhält den Phasenverlauf.
arg(I ⁄ I 0)
π/2
Q→∞
Q groß
π/4
0
ν1
−π/4
−π/2
+1 ν2
ν
oder atan ( I ⁄ I 0 ) = f ( Ω )
arg(I ⁄ I 0)
π/2
π/4
+1
Ω
-1
−π/4
−π/2
Der Parallelschwingkreis
Parallelschaltungen von R, L, C sind ebenfalls schwingungsfähig.
I
U
IR
IL
IC
1
Y = G + j ωC – -------
ωL
Weitere Aussagen über den Parallelschwingkreis erhält man
- entweder durch Ausrechnen (wie bei Serienschwingkreis)
- oder durch Einsetzen dualer Größen, also durch Ersetzen von
Lineare Netze im eingeschwungenen Zustand
Seite 199
Z ↔ Y , R ↔ G, L ↔ C, U ↔ I
Dann wird aus der bekannten Beziehung für die Impedanz des Serienschwingkreises die Beziehung für die Admittanz des Parallelschwingkreises.
1
Z = R + j ωL – --------
ωC
1
↔ Y = G + j ωC – -------
ωL
Gleichungen, die durch solche Vertauschung ineinander übergehen, heißen duale Gleichungen. Sie haben (aus formalen Gründen)
duale Lösungen. Insbesondere gilt
Reihenschwingkreis
Parallelschwingkreis
ω 0 = 1 ⁄ LC
ω 0 = 1 ⁄ LC
1
Z 0 = ω 0 L = ----------- =
ω0 C
L
---C
1
Y 0 = ω 0 C = ---------- =
ω0 L
C
---L
Q = Z0 ⁄ R
Q = Y0 ⁄ G
ω ω
Z = R 1 + jQ ------ – -----0-
ω0 ω
ω ω
Y = G 1 + jQ ------ – -----0-
ω0 ω
Z ⁄ R = 1 + jΩ
Y ⁄ G = 1 + jΩ
I ⁄ I 0 = 1 ⁄ ( 1 + jΩ )
U ⁄ U 0 = 1 ⁄ ( 1 + jΩ )
Bei Resonanz
U = UR
I = IG
eventuell wird
U L = –U C » U R
eventuell wird
I C = –I L » I G
Seite 200
GET-Skript
9.10 Leistung im Wechselstromkreis
9.10.1 Zeitabhängige Leistung
Bei Gleichstrom war Leistung P gegeben durch P = U ⋅ I
Bei Wechselstrom ist nun u = u ( t ) und i = i ( t ) zeitlich veränderlich und damit auch p ( t ) = u ( t ) ⋅ i ( t ) zeitabhängig.
Dies gilt auch bei sinusförmigen Wechselgrößen und es ist:
p ( t ) = Û ⋅ cos ( ωt + ϕ u ) ⋅ Î cos ( ωt + ϕ i )
Je nach Phasenlage zwischen u ( t ) und i ( t ) ist p ( t ) positiv oder
negativ. Für die Berechnung der im zeitlichen Mittel erzeugten
Leistung interessiert deshalb der arithmetische Mittelwert
p
Gleichanteil
ωt
u
ωt
i
ωt
- Schaltung nimmt Leistung auf, solange p(t) > 0 und
- Schaltung gibt Leistung ab, solange p(t) < 0 ist
Schreibt man u(t) = ReÛ ⋅ e
p(t) = u(t) ⋅ i(t) = ReÛ ⋅ e
jωt
jωt
und i(t) = ReÎ ⋅ e
⋅ ReÎ ⋅ e
jωt
, so ist
jωt
Gleichanteil
– j ωt 1
– j ωt
jωt 1
jωt 1
1
= --- Û ⋅ e + --- Û ∗ ⋅ e
⋅ --- Î ⋅ e + --- Î ∗ ⋅ e
2
2
2
2
– j 2ωt
j2ωt 1 ∗ ∗
1
1
1
= --- Û Î ∗ + --- Û ∗ Î + --- Û Î ⋅ e
+ --- Û Î ⋅ e
4
4
4
4
j2ωt
1
1
--- ReÛ Î ∗ + --- ReÛ Î ⋅ e
2
2
Wechselanteil
Man sieht dann, daß einem zeitlich konstanten Anteil, dem Gleichanteil, ein zeitlich veränderlicher Wechselanteil mit doppelter Fre-
Lineare Netze im eingeschwungenen Zustand
quenz überlagert ist. Der Gleichanteil entspricht also dem gesuchten arithmetischen Mittelwert und man nennt ihn Wirkleistung P.
2π
j ( ϕu – ϕi )
1
1
1
P = ------ ∫ p ( ωt ) dωt = --- ReÛ Î ∗ = --- ReÛ Î ⋅ e
2π
2
2
0
1
= --- Û Î cos ( ϕ u – ϕ i )
2
Bezeichnet man die Phasendifferenz mit ϕ = ϕ u – ϕ i und benutzt
man die Effektivspannung U = Û ⁄ 2 bzw. den Effektivstrom
I = Î ⁄ 2 , so ist
1
P = p = --- Û ⋅ Î ⋅ cos ϕ = U ⋅ I ⋅ cos ϕ die Wirkleistung
2
Die Wirkleistung ist die von der Schaltung im Mittel aufgenommene Leistung. Sie ist abhängig von Amplitude und Phase.
9.10.2 Spezialfälle: Rein ohm‘sche, induktive oder kapazitive
Schaltelemente
Betrachtung des Gleichanteils:
Wirkleistung an einem ohm‘schen Widerstand R: ϕ = 0 , also
2
2
P = U⋅I = I R = U ⁄R
P an R schreibt sich also wie im Gleichstromfall, wenn man Effektivwerte U und I benutzt.
Wirkleistung an einer Induktivität oder Kapazität: ϕ = ± π ⁄ 2 und
P = U ⋅ I ⋅ cos ϕ = 0
D.h. die Wirkleistung an Induktivität und Kapazität ist stets Null.
Betrachtung des Wechselanteils:
Der Wechselanteil der Leistung p ( t ) ist der Teil der Leistung, der
periodisch in einer Kapazität oder einer Induktivität gespeichert
und an den Generator zurückgegeben wird. Diese Leistung heißt
Blindleistung und pendelt ständig zwischen Blindwiderstand X
und Quelle hin und her. Diese „Wechselleistung“ ist unerwünscht;
denn sie leistet keine Arbeit und belastet die Leitungen mit Strom.
Wegen ϕ i = ϕ u ± π ⁄ 2 gilt bei reiner Belastung mit L und C, also
bei P = 0
Seite 201
Seite 202
GET-Skript
jϕ u
j ( ϕ ±π ⁄ 2 )
j2ωt
1
1
p ( t ) = --- ReÛ Î ⋅ e
= --- ReÛ Î ⋅ e ⋅ e u
2
2
1
= −
+ --- Û Î ⋅ sin 2 ( ωt + ϕ u )
2
Definitionsgemäß bezeichnet man die Amplitude dieser Wechselleistung als die Blindleistung Q, also
1
Q = ± --- Û ⋅ Î = −
+ U ⋅ I bei rein kapazitiver der induktiver Last.
2
Dabei ist Q > 0 bei induktiver Last und Q < 0 bei kapazitiver Last.
9.10.3 Beliebige Impedanz
Da bei ohm‘schen Widerständen ausschließlich Wirkleistung, bei
kapazitiven und induktiven Bauteilen ausschließlich Blindleistung
auftrat, soll untersucht werden, ob sich bei beliebigen Impedanzen
die Leistung als Überlagerung beider Komponenten beschreiben
läßt.
jIm ( Û , Î )
Û
Î W
ϕ
Î
ϕu ϕ i
Î B
Re ( Û , Î )
Wir teilen dazu den Strom Î in
- Wirkstrom Î W mit ϕ u – ϕ iW = 0 und
- Blindstrom Î B mit ϕ u – ϕ i B = ± π ⁄ 2 auf.
Im Zeigerdiagramm ist
j ( ϕ ±π ⁄ 2 )
.
Î B = Î sin ϕ ⋅ e u
dann
Î W = Î cos ϕ ⋅ e
jϕ u
und
Berechnet man nun aus den einzelnen Stromkomponenten die Leistungen i W ⋅ u und i B ⋅ u , so ergibt sich:
Für den Wirkstrom
– j ϕu
jϕ
1
1
P W = ( i W ⋅ u ) = --- ReÛ Î W ∗ = --- ReÛ e u Î cos ϕ ⋅ e
2
2
1
= Î ⋅ Û cos ϕ = --- I ⋅ U cos ϕ = P
2
D.h. der Wirkstrom erzeugt die bekannte Wirkleistung P.
Lineare Netze im eingeschwungenen Zustand
Für den Blindstrom
j2ωt
1
1
p ( t ) = i B ⋅ u = --- ReÛ Î B∗ + --- ReÛ Î B ⋅ e
2
2
– j ϕu
jϕ
1
± jπ ⁄ 2
= --- Re ( Û e u Î sin ϕ ⋅ e
⋅e
)
2
j2ϕ u
1
j2ωt
± jπ ⁄ 2
+ --- Re ( Û Î sin ϕ ⋅ e
⋅e
⋅e
)
2
j ( 2ωt + 2ϕ u ± jπ ⁄ 2 )
1
1
± jπ ⁄ 2
= --- Û Î sin ϕ ⋅ Re ( e
) + --- Û Î sin ϕ ⋅ Re ( e
)
2
2
1
= 0−
+ --- Î ⋅ Û ⋅ sin ϕ ⋅ sin 2 ( ωt + ϕ u )
2
d.h. die aus dem Blindstrom errechnete Leistung ist eine reine
Wechselgröße mit i B ⋅ u = 0 , deren Amplitude die Blindleistung
Q jetzt bei beliebiger Impedanz beschreibt
1
Q = --- Î ⋅ Û ⋅ sin ϕ = I ⋅ U ⋅ sin ϕ
2
wobei wieder bei induktiver Last sin ϕ > 0 , bei kapazitiver Last
sin ϕ < 0 ist.
Man darf also i in i B und i W aufspalten und erhält aus u ⋅ i W = P
die Wirkleistung, aus u ⋅ i B die Amplitude Q der Blindleistung.
9.10.4 Die Scheinleistung S
Legt man in dem (reellen) Zeigerdiagramm den Zeitpunkt t = 0
so, daß die Spannungszeiger auf die waagerechte Bezugsachse
fällt und trägt die Effektivwerte U und I auf, dann erhält man
I B = I sin ϕ
I
ϕ
U
I W = I cos ϕ
Multipliziert man nun alle Stromzeiger I , I w und I B mit U , so
werden diese nur um den Faktor U gestreckt (beachte: ϕ u = 0 )
und haben die Längen P, Q und S
Seite 203
Seite 204
GET-Skript
Q = UI sin ϕ
UI = S
ϕ
P = UI cos ϕ
Man nennt das Produkt U ⋅ I = S Scheinleistung. Weil sich aus
der Scheinleistung durch Multiplikation mit cos ϕ die Wirkleistung berechnen läßt, heißt cos ϕ auch Wirkfaktor. Es ist also
P = S ⋅ cos ϕ ; Q = S ⋅ sin ϕ
Man kann diese Diagramme ( ϕ u = 0 ) auch in der komplexen Ebene aufzeichnen. Man erhält für die Scheinleistung eine komplexe
Größe S mit dem Realteil P und dem Imaginärteil Q .
jIm(S)
Q = Im(S)
S = P + jQ
ϕ
P = Re(S)
Re(S)
Die Länge S = S ist wie in der reellen Schreibweise
1
S = U ⋅ I = --- Û ⋅ Î =
2
2
P +Q
2
Die Richtung von S ist weiterhin ϕ . Damit läßt sich S schreiben
als
S = U⋅I⋅e
= U⋅e
jϕ u
jϕ
= U⋅I⋅e
⋅I⋅e
Mit U = U ⋅ e
jϕ u
j ( ϕu – ϕi )
– jϕ i
*
und I = I ⋅ e
*
1
*
S = U ⋅ I = --- Û ⋅ Î
2
– jϕ i
ergibt sich
Lineare Netze im eingeschwungenen Zustand
und
*
1
*
P = Re ( U ⋅ I ) = --- Re ( Û ⋅ Î ) oder
2
*
1
1
*
*
*
P = --- ( U ⋅ I + I ⋅ U ) = --- ( Û ⋅ Î + Î ⋅ U )
2
4
*
1
*
Q = Jm ( U ⋅ I ) = --- Jm ( Û ⋅ Î )
2
Zur symbolischen Unterscheidung verwendet man für P bzw. für
S und Q unterschiedliche Einheiten, nämlich
[ P ] = Watt und [ S ] = [ Q ] = Voltampere .
Seite 205
Seite 206
GET-Skript
10 Lineare Zweipole und Zweitore
10.1 Grundüberlegung
Bisher: Beliebige Zusammenschaltung von R, L, C ;
individuelle Betrachtungsweise; keine für alle Schaltungen allgemeingültige Aussagen.
Hier: Nur zwei Klassen von Schaltungen betrachten;
allgemeine Betrachtungsweise durch allgemeine Kenngrößen;
damit für beide Klassen allgemeingültige Aussagen.
I
I1
U
I2
U1
I
Eintor (Zweipol)
1 lineare Gleichung
U2
I3
I4
Zweitor (allgemein Vierpol)
2 lineare Gleichungen (Matrix)
Wie betrachten also die Zweipole (Eintore), die durch zwei Koeffizienten einer linearen Gleichung beschrieben sind und eine spezielle Klasse der Vierpole (die Zweitore), die durch die Koeffizientenmatrix eines Systems von zwei linearen Gleichungen
beschrieben werden. Alle weiteren Betrachtungen erfolgen für
- den quasistationären Zustand
- den eingeschwungenen Zustand und für
- lineare Zweipole bzw. Vierpole
Beispiele für Zweipole: Impedanzen, Ersatzspannungsquellen, Ersatzstromquellen
Beispiele für Vierpole: Spannungsteiler, Filter, Übertrager, Transformatoren usw.
Lineare Zweipole und Zweitore
Seite 207
10.2 Leistungsberechnung an linearen Zweipolen
Lineare Zweipole wurden bereits bei den Gleichstromschaltungen
behandelt. Bei Zweipolen im Wechselstromkreis gibt es lediglich
zur Leistungsberechnung einige Nachträge:
Passive Zweipole:
Es ist U L = U K = 0 , d.h. passive Zweipole werden beschrieben
durch U = Z ⋅ I oder I = Y ⋅ U , also durch eine einzige Konstante Z oder Y .
Bei physikalisch realisierbaren passiven Zweipolen, darf die Leistung P nicht negativ sein, also
1 *
*
P = --- ( I ⋅ U + U ⋅ I ) > 0
2
*
*
*
und mit U = Z ⋅ I bzw. U = Z ⋅ I wird
*
Z+Z
1 2
2
P = I ⋅ I ⋅ ---------------- = --- I ⋅ Re ( Z ) = I ⋅ Re ( Z ) ≥ 0
2
2
*
Für passive Zweipole ist also Re ( Z ) > 0 und damit auch
Re ( Y ) > 0
Aktive Zweipole:
Die aufgenommene Leistung ist
*
*
P = Re ( U ⋅ I ) = Re { ( U L + Z ⋅ I ) ⋅ I }
*
*
= Re { U L ⋅ I } + I ⋅ I ⋅ Re { Z }
P kann also je nach Größe von U , I positiv oder negativ werden.
Seite 208
GET-Skript
10.3 Leistungsanpassung bei Zweipolen
Die Leistungsabgabe von einem aktiven Zweipol an einen passiven Zweipol muß ebenfalls noch für den Wechselstromkreis untersucht werden.
Ia
Zi
Ul
Ua
Za
Dazu muß untersucht werden, wie die Leistung Pa an der Last
Z a = R a + jX a bei gegebenem Z i = R i + jX i von Ra und Xa abhängt. Allgemein war
2
2
P a = I a ⋅ R a = I a ⋅ Re ( Z a ) wobei
UL
UL
- = ------------------------------------------------- und
I a = ---------------Zi + Za
Ra + Ri + j ( X a + X i )
2
Ia
2
UL
= --------------------------------------------------------.
2
2
( Ra + Ri ) + ( X a + X i )
Somit ist also
1
2
P a = U L ⋅ --------------------------------------------------------------------1
2
2
------ [ ( R i + R a ) + ( X i + X a ) ]
Ra
Leistungsanpassung heißt: die von Z a aufgenommene Leistung
soll ein Maximum sein.
∂P
∂P
also: --------a- = 0 und --------a- = 0
∂R a
∂X a
Da die Variablen Ra und Xa nur im Nenner vorkommen, genügt es,
dessen Ableitung nach Ra und Xa zu bilden und die Nullstellen zu
suchen.
Lineare Zweipole und Zweitore
Seite 209
2
2
( Xi + Xa)
Ri
∂ 1
2
2
------ [ ( R i + R a ) + ( X i + X a ) ] = 1 – -------2 – ------------------------=0
2
∂ Ra Ra
R
R
a
a
2( X i + X a)
∂ 1
2
2
------ [ ( R i + R a ) + ( X i + X a ) ] = -------------------------=0
Ra
∂ X a Ra
Beide Ableitungen werden gleichzeitig Null für X a = – X i und
R i = R a . Damit erfolgt Leistungsanpassung bei Z a = Z i* und
die Leistung wird dann
2
P max
1 Ue
= --- -----------4 Ra
10.4 Beschreibung von Vierpolen durch Matrizen
I1
U1
U4
I2
U2
Schaltung
I3
U3
I4
An dem gezeigten Vierpol sind zugänglich:
- 4 Klemmenspannungen
- 4 Klemmenströme
und es gilt nach den Kirchhoff‘schen Regeln
I1 + I2 – I3 – I4 = 0
U1 + U4 – U2 – U3 = 0
Von diesem allgemeinen Fall des Vierpols unterscheidet man den
Spezialfall Zweitor. Als Tore bezeichnet man Klemmenpaare, bei
denen der einfließende und ausfließende Strom gleich ist.
In den beiden „Toren“ ist also I 1 = I 3 und I 2 = I 4 .
Seite 210
GET-Skript
Das gilt immer wenn Vierpol Zwischenglied zwischen Sender und
Empfänger ist, also z. B.
Zweitor
aktiv
passiv
Ab jetzt sollen ausschließlich Zweitore betrachtet werden, die wie
bereits vereinbart linear und passiv sein sollen.
Dann gilt allgemein:
a 11 U 1 + a 12 U 2 + b 11 I 1 + b 12 I 2 = 0
a 21 U 1 + a 22 U 2 + b 21 I 1 + b 22 I 2 = 0
und es muß entweder
a 11 a 12
≠ 0 oder
a 21 a 22
b 11 b 12
≠ 0 sein.
b 21 b 22
Mit det a nn ≠ 0 kann man nach U 1 bzw. U 2 auflösen und erhält
die Beschreibung durch dieWiderstandsmatrix.
10.4.1 Die Widerstandsmatrix
U 1 = Z 11 I 1 + Z 12 I 2
U 2 = Z 21 I 1 + Z 22 I 2
oder
U 1
Z 11 Z 12 I 1
=
⋅
U 2
Z 21 Z 22 I 2
und mit den Spaltenmatrizen von Spannung und Strom
U 1
I 1
[ U ] = und [ I ] =
U 2
I 2
lautet die Beschreibung des Zweitors
[U ] = [Z ] ⋅ [I ]
Lineare Zweipole und Zweitore
Dabei ist [ Z ] =
Z 11 Z 12
Z 21 Z 22
die Widerstandsmatrix des Zweitores.
Die Elemente Z nn der Widerstandsmatrix haben die Dimension
einer Impedanz. Bei der Betrachtung eines Zweitors als „black
box“ müssen diese Elemente durch Messungen an den Klemmen
bestimmbar sein.
Messung der Widerstandsmatrix [ Z ]
Zur Bestimmung der vier Elemente Z mn der Widerstandsmatrix
sind vier Messungen erforderlich. Am einfachsten wählt man folgende Leerlauf-Fälle
I2 = 0 :
Z 11 = U 1 ⁄ I 1 = Z 1l
Z 1l am Tor 1 bei leerlaufendem Tor 2 gemessene Impedanz
= Eingangs-Leerlaufimpedanz.
I1 = 0 :
Z 22 = U 2 ⁄ I 2 = Z 2l
Z 2l am Tor 2 bei leerlaufendem Tor 1 gemessene Impedanz
= Ausgangs-Leerlaufimpedanz.
I2 = 0 :
Z 21 = U 2 ⁄ I 1
Z 21 Quotient aus Leerlaufspannung an Tor 2 und
Strom an Tor 1
= Leerlauf-Kernimpedanz vorwärts.
I1 = 0 :
Z 12 = U 1 ⁄ I 2
Z 12 Quotient aus Leerlaufspannung an Tor 1 uns
Strom an Tor 2
= Leerlauf-Kernimpedanz rückwärts.
Z 12, Z 21 bilden ein Maß für die Kopplung zwischen Tor 1 und Tor
2.
Z 12 = Z 21 bedeutet: das Zweitor ist kopplungssymmetrisch oder
übertragungssymmetrisch.
Z 11 = Z 22 bedeutet: das Zweitor ist widerstandssymmetrisch.
Seite 211
Seite 212
GET-Skript
Beispiel 1:
I1
U1
U 1 = R( I 1 + I 2)
I2
U2
R
also Z = RR
RR
U 2 = R( I 1 + I 2)
Beispiel 2:
I1
U1
I2
R1
U 1 = R1 I 1
also
Z =
U 2 = R2 I 2
R2
U2
R1 0
0R 2
10.4.2 Die Leitwertmatrix
Bei Auflösung der beiden linearen Gleichungen nach I 1 bzw. I 2
erhält man
I 1 = Y 11 ⋅ U 1 + Y 12 U 2 oder
I 2 = Y 11 ⋅ U 1 + Y 22 U 2
I 1
Y 11 Y 12 U 1
=
⋅ bzw. [ I ] = [ Y ] [ U ]
I 2
Y 21 Y 22 U 2
Y 11 Y 12
Dabei ist [ Y ] =
die Leitwertmatrix des Zweitors mit
Y 21 Y 22
Dimension einer Admittanz.
Lineare Zweipole und Zweitore
Messung der Leitwertmatrix
Es sind vier Messungen erforderlich, am einfachsten für folgende
Kurzschluß-Fälle.
U2 = 0 :
Y 11 = I 1 ⁄ U 1 = Y 1k
Y 1k am Tor 1 bei kurzgeschlossenem Tor 2 gemessene Admittanz
= Eingangs-Kurzschlußadmittanz.
U1 = 0 :
Y 22 = I 2 ⁄ U 2 = Y 2k
Y 2k am Tor 2 bei kurzgeschlossenem Tor 1 gemessene Admittanz
= Ausgangs-Kurschlußadmittanz.
U2 = 0 :
Y 21 = I 2 ⁄ U 1
Y 21 Quotient aus Kurzschlußstrom an Tor 2 und Spannung an Tor 1
= Kurzschluß-Kernadmittanz vorwärts.
U1 = 0 :
Y 12 = I 1 ⁄ U 2
Y 12 Quotient aus Kurzschlußstrom an Tor 1 und Spannung an Tor 2
= Kurzschluß-Kernadmittanz rückwärts.
Y 12, Y 21 bilden ein Maß für die Kopplung zwischen Tor 1 und Tor
2.
Y 12 = Y 21 heißt: Zweitor ist kopplungssymmetrisch oder übertragungssymmetrisch.
Y 11 = Y 22 heißt: Zweitor ist widerstandssymmetrisch.
Seite 213
Seite 214
GET-Skript
Beispiel 1:
I1
I2
G
U1
I 1 = G(U 1 – U 2)
U2
also Y = G – G
–G G
I 2 = G(U 2 – U 1)
Beispiel 2:
I1
U1
I2
G1
U2
G2
I 1 = G1 U 1
also Y =
I 2 = G2 U 2
G1 0
0 G2
10.4.3 Die Kettenmatrix
Bei Auflösung der linearen Gleichungen nach
U 1 abhängig von U 2, – I 2 und nach I 1 abhängig von U 2, – I 2 erhält man
U 1 = A 11 U 2 + A 12 ⋅ ( – I 2 ) oder
I 1 = A 21 U 2 + A 22 ⋅ ( – I 2 )
U 1
A 11 A 12 U 2
U 2
=
= [ A] ⋅
I1
A 21 A 22 – I 2
– I 2
Lineare Zweipole und Zweitore
Seite 215
[ A ] wird verwendet bei der Berechnung von Kettenschaltung von
Zweitoren und heißt daher Kettenmatrix. Die Elemente von [ A ]
haben unterschiedliche Dimension. Bei der Verkettung von
Zweitoren ist der Ausgangsstrom – I 2 des ersten Zweitors gleich
dem Eingangsstrom I' 1 des folgenden (siehe Bild) und deshalb ist
es vorteilhaft, U 1 und I 1 abhängig von U 2, – I 2 zu beschreiben.
– I' 2 = I'' 1
I 1 I' 1
U1
U' 1 [ A' ]
U' 2= U'' 1 [ A'' ]
– I'' 2
=
I''' 1
– I''' 2– I 2
U'' 2= U''' 1 [ A''' ] U''' 2 U 2
[ A' ]
Messung der Elemente der Kettenmatrix
Es sind wieder vier Messungen erforderlich. Sind jedoch die Elemente von [ Y ] und [ Z ] bereits bekannt, so ist
A 12 = – 1 ⁄ Y 21
A 21 = 1 ⁄ Z 21
ebenfalls bekannt. A 11 und A 22 ergeben sich dann aus folgenden
Messungen:
I2 = 0 :
A 11 = U 1 ⁄ U 2
A 11 = Leerlauf-Spannungsübersetzung vorwärts.
U2 = 0 :
A 22 = I 1 ⁄ ( – I 2 )
A 22 = Kurzschluß-Stromübersetzung vorwärts.
Seite 216
GET-Skript
Beispiel 1:
I1
I2
G
U1
U2
1
U 1 = 1 ⋅ U 2 + ---- ( – I 2 )
G
also [ A ] = 1 1 ⁄ G
0 1
I 1 = 0 ⋅ U 2 + 1 ⋅ ( –I 2 )
Beispiel 2:
I1
U1
U 1 = 1 ⋅ U 2 + 0 ⋅ ( –I 2 )
I 1 = U 2 ⁄ R + 1 ⋅ ( –I 2 )
I2
R
U2
also [ A ] = 1 0
1⁄R 1
10.4.4 Die Reihen-Parallelmatrix
Auflösung der Gleichungen nach U 1 und nach I 2 abhängig von
I 1, U 2
U 1 = H 11 I 1 + H 12 U 2
I 2 = H 21 I 1 + H 22 U 2
oder
U 1
H 11 H 12 I 1
I1
=
⋅ = [H ] ⋅
I2
H 21 H 22 U 2
U 2
[ H ] wird verwendet bei der Beschreibung von Reihen-Parallelschaltung von Zweitoren und heißt deshalb Reihen-Parallel-Matrix.
Lineare Zweipole und Zweitore
Seite 217
Beispiel:
[H ]
[ H' ]
[ H'' ]
[ H ] läßt sich leicht durch [ H' ] und [ H'' ] ausdrücken.
10.4.5 Die Parallel-Reihenmatrix
Auflösung der Gleichungen nach [ I 1 ] und [ U 2 ] in Abhängigkeit
von [ I 2 ] und [ U 1 ] ergibt
I 1 = P 11 U 1 + P 12 I 2 oder
I1
P 11 P 12 U 1
U 1
=
=
(
P
)
U 2
P 21 P 22 I 2
I2
U 2 = P 21 U 1 + P 22 I 2
[ P ] wird verwendet bei der Beschreibung von Parallel-Reihenschaltungen von Zweitoren und heißt deshalb Parallel-ReihenMatrix.
Beispiel:
[P]
[ P' ]
[ P'' ]
[ P ] läßt sich leicht durch [ P′ ] und [ P′′ ] ausdrücken.
Seite 218
GET-Skript
10.4.6 Umrechnung der Matrizen [ Z ], [ Y ], [ A ], [ H ] und [ P ]
Bei Kettenmatrix [ A ] wurden nur zwei Elemente gemessen, zwei
weitere durch Elemente von [ Y ] bzw. [ Z ] dargestellt. Bei [ H ]
und [ P ] wurde keine Meßvorschrift genannt. Aber eine Meßvorschrift genügt, weil alle Matrizen ineinander umgerechnet werden
können.
Denn: Alle Matrizen beschreiben die Zweitoreigenschaften
gleichwertig. (Ein Gleichungssystem wurde nach verschiedenen
Variablen aufgelöst!)
Zur Umrechnung siehe Hilfsblatt oder [Bosse III, S. 73]
Wegen der Gleichwertigkeit der Matrizen läßt sich auch die Kopplungssymmetrie auf verschiedene Weise gleichwertig beschreiben:
Z 12 = Z 21 ; Y 12 = Y 21
H 12 = – H 21 ; P 12 = – P 21
det ( A ) = 1
und ähnliche gleichwertige Bedingungen erhält man für die Widerstandssymmetrie
Z 11 = Z 22 ; Y 11 = Y 22
det ( H ) = 1 ; det ( P ) = 1
A 11 = A 22 ,
Einige Umrechnungen (Hilfsblatt) ergeben sich durch Berechnung
der Kehrmatrix.
Lineare Zweipole und Zweitore
Seite 219
Beispiel:
[ U ] = [ Z ] ⋅ [ I ] von links ⋅ [ Z ]
[Z ]
–1
⋅ [U ] = [Z ]
–1
weil aber auch
–1
[Z ] = [Y ]
–1
⋅ [Z ] ⋅ [I ] = [I ]
[Y ] ⋅ [U ] = [I ] →
[Y ] = [Z ]
–1
und
–1
kann wie folgt berechnet werden (vgl. Hilfsblatt und
[Z ]
Mathe):
[Z ]
–1
Z 22 – Z 12
1
= ----------------- ⋅
det ( Z ) – Z
21 Z 11
Ähnlich erhält man
[H ] = [P]
–1
und [ P ] = [ H ]
–1
–1
Bedeutung von [ A ] :
U1
I1
= A ⋅
U2
–I 2
→
–1
A
U1
I1
=
U2
–I 2
–1
d.h. [ A ] beschreibt Verhalten des Zweitores in umgekehrter Betriebsrichtung.
Davon zu unterscheiden ist das „umgedrehte“ Zweitor.
Normale Betriebsrichtung, aber Tor 1 mit Tor 2 vertauscht:
Also
U2
abhängig von
U1
I2
–I 1
mern 1 → 2 bzw. 2 → 1
U2
–I 2
= A
–1
U1
I1
und Vertauschung der Tor-Num-
Seite 220
GET-Skript
U2
–I 2
U2
I2
U1
I1
A – A 12 U 1
1
= ----------------- 22
det ( A ) – A
I1
21 A 11
(2. Spalte und 2. Zeile
jeweils ⋅ ( – 1 ) )
U1
A A
1
= ----------------- 22 12
(jetzt 1 → 2 ; 2 → 1 )
det ( A ) A A
21 11 – I 1
1
= ----------------- ⋅ A
det [ A ]
t
U2
–I 2
wobei A
t
= transponierte Matrix
D. h. bis auf Vorzeichen bei A 12 und A 21 sind sowohl die umgekehrte Betriebsrichtung als auch das umgedrehte Zweitor durch die
–t
gleiche Matrix [ A ] beschrieben.
Im Spezialfall einer kopplungssymmetrischen Kettenmatrix [ A ]
ist
det [ A ] = A 11 A 22 – A 12 A 21 = 1
Dann bedeutet „Umdrehen“ des Zweitores Transponieren also
Vertauschen von A 11 und A 22 der Matrix [ A ] .
Lineare Zweipole und Zweitore
Seite 221
10.5 Zusammenschaltung von Zweitoren
10.5.1 Reihenschaltung
Reihenschaltung von Zweitoren heißt: sowohl Eingangstore als
Ausgangstore der Zweipole in Reihe. Dann ist
I1
I' 1
I' 2
U' 1 [ Z' ]
U1
I'' 1
I2
U' 2
I'' 2
U2
U'' 1 [ Z'' ] U'' 2
[Z ]
U 1 = U' 1 + U'' 1 und U 2 = U' 2 + U'' 2
I 1 = I' 1 = I'' 1 und I 2 = I' 2 = I'' 2
Alle Ströme sind bekannt. Deshalb Bestimmung von U aus
[U ] = [Z ] ⋅ [I ]
Gegeben:
U' = Z' ⋅ I' = Z' ⋅ I und
U'' = Z'' ⋅ I'' = Z'' ⋅ I
Aber weil U = U' + U'' , ist
U = Z' ⋅ I + Z'' ⋅ I = Z' + Z'' ⋅ I
Durch Vergleich mit dem Gesamtzweitor U = Z ⋅ I ergibt
sich
Z = Z' + Z'' oder Z =
Z' 11 + Z'' 11 Z' 12 + Z'' 12
Z' 21 + Z'' 21 Z' 22 + Z'' 22
Bei Reihenschaltung von Zweitoren addieren sich die Z -Matrizen
der beteiligten Zweitore zur Z -Matrix des Gesamt-Zweitors
Seite 222
GET-Skript
10.5.2 Parallelschaltung
Parallelschaltung von Zweitoren heißt: sowohl die Eigangstore als
die Ausgangstore der beteiligten Zweitore sind parallel geschaltet.
Dann ist:
I' 1
I' 2
I1
U1
U' 1 [ Y' ] U' 2
I'' 1
I2
U2
I'' 2
U'' 1 [ Y'' ] U'' 2
[Y ]
I 1 = I' 1 + I'' 1 und I 2 = I' 2 + I'' 2
U 1 = U' 1 = U'' 1 und U 2 = U' 2 = U'' 2
Alle
Spannungen
I = Y ⋅ U .
sind
bekannt,
deshalb
auflösen
nach
Gegeben ist:
I' = Y' ⋅ U' = Y' ⋅ U und
I'' = Y'' ⋅ U'' = Y'' ⋅ U
aber weil
I = I' + I'' ist
I = Y' ⋅ U + Y'' ⋅ U = Y' + Y'' ⋅ U
Durch Vergleich mit der Gleichung für das Gesamtzweitor
I = Y ⋅ U ergibt sich
Y = Y' + Y'' oder Y =
Y 11 + Y'' 11 Y' 12 + Y'' 12
Y' 21 + Y'' 21 Y' 22 + Y'' 22
Bei Parallelschaltung von Zweitoren addieren sich die Y -Matrizen der beteiligten Zweitore zur Y -Matrix des Gesamtzweitors.
Lineare Zweipole und Zweitore
Seite 223
10.5.3 Reihen-Parallelschaltung
Reihen-Parallelschaltung bei Zweitoren heißt: die Eigangstore
sind in Reihe, die Ausgangstore sind parallel geschaltet. dann ist:
I1
I' 1
I' 2
U' 1 [ H' ] U' 2
U1
I2
U2
I'' 2
I'' 1
U'' 1 [ H'' ] U'' 2
[H ]
U 1 = U' 1 + U'' 1 und I 2 = I' 2 + I'' 2
I 1 = I' 1 = I'' 1 und U 2 = U' 2 = U'' 2
oder vektoriell geschrieben
U1
=
I2
U' 1
U'' 1
+
I' 2
und
I1
I' 1
=
U2
I'' 2
+
U' 2
I'' 1
U'' 2
Alle Eingangsströme und Ausgangsspannungen bekannt, deshalb
Auflösung des Gleichungssystems nach Eingangsspannungen und
Ausgangsströmen:
U' 1
I' 2
U'' 1
I'' 2
= H' ⋅
= H'' ⋅
Weil aber
U1
I' 1
U' 2
I'' 1
I' 2
I2
U1
I2
= H' ⋅
U' 1
I1
U2
+
und
U2
I1
= H'' ⋅
U'' 2
=
I1
= H' ⋅
U'' 1
U2
, ergibt sich
I'' 2
+ H'' ⋅
I1
U2
I
= H' + H'' ⋅ 1
U2
Seite 224
GET-Skript
Durch Vergleich mit der Gleichung für das Gesamtzweitor
U1
I
= H ⋅ 1 erhält man
U2
I2
H = H' + H'' oder H =
H' 11 + H'' 11 H' 12 + H'' 12
H' 21 + H'' 21 H' 22 + H'' 22
Bei Reihen-Parallelschaltung addieren sich die H -Matrizen der
beteiligten Zweitore.
10.5.4 Parallel-Reihenschaltung
Parallel-Reihenschaltung von Zweitoren heißt: die Eingangstore
sind parallel, die Ausgangstore in Reihe geschaltet. Die Betrachtungen erfolgen analog zu 10.5.3, mit dem Ergebnis
P =
P' 11 + P'' 11 P' 12 + P'' 12
P' 21 + P'' 21 P' 22 + P'' 22
Es addieren sich die [ P ] -Matrizen der beteiligten Zweitore.
10.5.5 Kettenschaltung
Kettenschaltung von Zweitoren heißt: das Ausgangstor des ersten
Zweitors ist mit dem Eingangstor des zweiten verbunden. Dann
gilt:
I 1 I' 1
U1
U' 1
– I' 2 I'' 1
[ A' ]
U' 2 U'' 1
– I'' 2 – I 2
[ A'' ]
U'' 2
[ A]
U' 2 = U'' 1 und – I' 2 = I' 1
oder in vektorieller Schreibweise
U' 2
– I' 2
=
U'' 1
I'' 1
U2
Lineare Zweipole und Zweitore
Seite 225
Gegeben ist für beide Zweitore
U' 1
I' 1
U1
= A' ⋅
=
I1
U' 1
I' 1
U' 2
und
U'' 1
– I' 2
I'' 2
= A' ⋅ A'' ⋅
= A'' ⋅
U'' 2
– I'' 2
U'' 2
, also
– I'' 2
= A' ⋅ A'' ⋅
U2
–I 2
Durch Vergleich mit der Gleichung für das Gesamtzweitor ergibt
sich
A = A' ⋅ A'' (Achtung! Reihenfolge)
Bei Kettenschaltung berechnet sich die [ A ] -Matrix des Gesamtzweitors durch Multiplikation der [ A ] -Matrizen der Teilschaltungen in der Reihenfolge der Tore.
10.5.6 Beispiele und Anwendungsgrenzen
Beispiel:
Bekannt ist:
R1
mit Z' =
R2
R1 0
0 R2
und
R
mit Z'' = R R
R R
Seite 226
GET-Skript
Bei Reihenschaltung der beiden Zweitore ergibt sich
R1
[Z ]
R2
R1
oder
R2
R
R
beschrieben durch die Matrix
[ Z ] = [ Z' ] + [ Z'' ] =
R1 + R
R
R
R2 + R
[ Z ] beschreibt das häufig verwendete T-Glied.
Beispiel:
Bekannt ist:
G
mit [ Y' ] =
G –G
–G G
und
G1
mit [ Y'' ] =
G1 0
0 G
G2
Lineare Zweipole und Zweitore
Seite 227
Durch Parallelschaltung ergibt sich
G
G
oder
G1
G1
G2
G2
beschrieben durch die Matrix
[ Y ] = [ Y' ] + [ Y'' ] =
G1 + G
–G
–G
G2 + G
[ Y ] beschreibt das häufig verwendete π -Glied.
Beachte:
Diese Regeln für Zusammenschaltung gelten unter
Annahme, daß die Teilzweitore auch nach Zusammenschaltung Zweitore bleiben, daß also
I' 1 = I' 3 ; I' 2 = I' 4 ; I'' 1 = I'' 3 ; I'' 2 = I'' 4 ist.
Das ist nur bei der Kettenschaltung selbstverständlich. Bei allen
anderen Zusammenschaltungen muß geprüft werden, ob die
Zweitorbedingungen für kein Teilzweitor verletzt werden.
Allgemeines Prüfkriterium:
Keine Kreisströme bei mindestens zwei beliebigen Betriebsbedinungen. Wegen Linearität gibt es dann unter keiner Bedingung
Kreisströme.
Beispiel: Reihenschaltung
I1
I2 = 0
I
U1
I
I1
I2 = 0
Seite 228
GET-Skript
Prüfung rechts: Ist im Leerlauf der Kreisstrom I = 0 ?
I1 = 0
I2
I
U2
I
I1 = 0
I2
Prüfung links: Ist im Leerlauf Kreisstrom I = 0 ?
Beispiel: Parallelschaltung
I
U1
I
Prüfung rechts: Ist im Kurzschluß I = 0 ? Ähnlich Prüfung links
auf I = 0 im Kurzschluß.
10.6 Der Übertrager (Transformator)
10.6.1 Beschreibung durch [ Z ] und [ A ]
Beschreibung des Transformators als Zweitor
i1
u1
di 2
di
u 1 = L 1 ------1- + M ------- und
dt
dt
di 2
di
u 2 = M ------1- + L 2 ------dt
dt
i2
u2
Lineare Zweipole und Zweitore
Seite 229
Die entsprechenden komplexen Amplituden bei sinusförmigen
Strömen und Spannungen sind dann
U 1 = jωL 1 I 1 + jωM I 2
U 2 = jωM I 1 + jωL 2 I 2
oder als Zweitor beschrieben:
U1
=
U2
jωL 1 jωM
jωM jωL 2
⋅
I1
I2
= Z ⋅
I1
I2
[ Z ] ist Widerstandsmatrix des verlustfreien Übertragers.
Bei dem verlustfreien Übertrager geht man von der Annahme aus,
daß der magnetische Fluß zum Strom proportional ist und daß die
Wicklung keinen ohm‘schen Widerstand aufweist, also φ ∼ i und
R ( Wicklung ) = 0 .
Da der Übertrager häufig mit anderen Zweipolen oder Zweitoren
verkettet ist, interessiert auch die Kettenmatrix [ A ] . Mit dem
Hilfsblatt ergibt sich [ A ] aus [ Z ] zu
A =
L 1 ⁄ M jω ( L 1 ⋅ L 2 ⁄ M – M )
L2 ⁄ M
1 ⁄ jωM
In Kapitel 7.4.2 "Energie mehrerer (gekoppelter) Spulen" war definiert:
M = k ⋅ L 1 L 2 mit 0 ≤ k ≤ 1 , wobei gegolten hatte
- kleiner gemeinsamer Fluß (lose Kopplung): k ≈ 0
- großer gemeinsamer Fluß (feste Kopplung): k ≈ 1 .
Der Koppelfaktor k beschreibt also, ob das Streufeld, das die jeweils andere Spule nicht durchsetzt, groß oder klein ist. Dieses
Streufeld beschreibt man oft auch mit dem Streufaktor σ
2
2
σ = 1 – k = 1 – M ⁄ ( L 1 L 2 ) und es gilt
- kleine Streufelder: σ ≈ 0
- große Streufelder: σ ≈ 1
In der Kettenmatrix wird häufig M durch den Streufaktor σ bzw.
Seite 230
GET-Skript
die Koppelkonstante k ersetzt und man schreibt
[ A] =
L 1 ⁄ M jωσL 1 L 2 ⁄ M
L2 ⁄ M
1 ⁄ jωM
1
= --- ⋅
k
L1 ⁄ L2
jωσ L 1 L 2
1 ⁄ jω L 1 L 2
L2 ⁄ L1
Mit σ → 0 , d. h. für einen idealen Übertrager ohne Streuung wird
k = 1 . Weiterhin nimmt man an, daß beim idealenÜbertrager die
Induktivitäten L 1 und L 2 zwar gegen Unendlich gehen, daß dabei
aber das Verhältnis L 1 ⁄ L 2 = ü , konstant bleibt. Dann erhält
man
[ A ] ideal =
L1 ⁄ L2
L2 ⁄ L1
0
Man nennt ü =
tragers.
0
= ü 0
0 1ڟ
L 1 ⁄ L 2 das Übersetzungsverhältnis des Über-
10.6.2 Ersatzschaltbild des verlustfreien Übertragers
Das einfachste Ersatzschaltbild, das einen Übertragers beschreibt,
ist ein T -Glied.
I2
I1
U1
L1-M
L2-M
M
U2
Man sieht anschaulich die Verkopplung der Primär - und Sekundärspule über die mittlere Spule mit Induktivität M . Der Nachteil
bei diesem sehr einfachen Ersatzschaltbild besteht darin, daß nicht
alle Betriebszustände beschrieben werden, bzw. daß es Betriebszustände gibt, bei denen Induktivitäten der Ersatzschaltung negativ würden. Dieses Ersatzschaltbild ist also nur brauchbar unter der
Einschränkung, daß L 1 – M > 0 , L 2 – M > 0 und M > 0 .
Lineare Zweipole und Zweitore
Nun ist
L1 – M =
Seite 231
L1 ⋅ L1 – L1 L2 ⋅ k =
L 1 ( L 1 – L 2 ⋅ k ) , also
2
L 1 – M > 0 nur für L 1 > L 2 ⋅ k und ähnlich
L 2 – M > 0 nur für L 2 > L 1 ⋅ k
2
Außerdem würde dieses Ersatzschaltbild das Umpolen einer
Wicklung nicht beschreiben, weil dazu M negativ werden müßte.
Ausweg:
Das Ersatzschaltbild wird derart ergänzt, daß die obigen Bedingungen erfüllt sind.
Neues Ersatzschaltbild
Reale Eigenschaften
des Übertragers
Überstz./Umpolen
durch ideal. Übertr.
oder
I1
ü2L2-üM
L1-üM
U1
U2
üM
[ A' ]
I2
ü/1
[ A'' ]
[A]
Für die Verkettung des Ersatzschaltbildes mit dem idealen Übertrager gilt
[ A ] = [ A' ] ⋅ [ A'' ] von rechts ⋅ [ A'' ]
[ A' ] = [ A ] ⋅ [ A'' ]
–1
–1
–1
Mit [ A'' ] = ü 0 und [ A'' ] = 1 ⁄ ü 0 wird
0 ü
0 1ڟ
[ A' ] =
L1 ⁄ M
jωσL 1 L 2 ⁄ M
1 ⁄ ( jωM )
L2 ⁄ M
⋅ 1⁄ü 0
0 ü
2
=
L 1 ⁄ ( üM ) jωσL 1 ( ü L 2 ) ⁄ ( üM )
1 ⁄ jω ( üM )
2
( ü L 2 ) ⁄ ( üM )
Seite 232
GET-Skript
Vergleicht man [ A' ] mit [ A ] , so sieht man, daß M durch ( ü ⋅ M )
2
und L 2 durch ( ü ⋅ L 2 ) ersetzt ist. Gegenüber dem ursprünglichen Schaltbild haben sich also die Induktivitäten in Abhängigkeit
vom Übersetzungsverhältnis ü des idealen Übertragers geändert.
L1-üM
ü2L2-üM
üM
[ A' ]
Man kann also die realen Eigenschaften wie vorher mit einem T Glied und den Induktivitäten L 1, L 2 und M des gegebenen Übertragers beschreiben, nun aber im idealen Übertrager ü so anpassen,
daß keine der Induktivitäten im T -Glied negativ wird. Man wählt
ü also so, daß
2
L 1 – üM ≥ 0 , ü L 2 – üM ≥ 0 und üM ≥ 0 bleiben und ü das Vorzeichen von M hat.
Diese drei Ungleichungen lassen sich zusammenfassen zur Bedingung
M ⁄ L2 ≤ ü ≤ L1 ⁄ M
Zwischen den obigen Grenzen kann nun ü beliebige Werte annehmen. Besonders gebräuchlich sind aber folgende drei Festlegungen von ü.
1. Spezialfall: L 1 – üM = 0 :
d. h. die linke Längsspule verschwindet. Es wird
L1 ⋅ L1 ⋅ L2
- =
ü = L 1 ⁄ M = -------------------------------------L2 ⋅ M
L1 L2
L
-----1 ⋅ ---------------M
L2
2
und mit 1 – σ = M ⁄ ( L 1 L 2 ) → wird
das Übersetzungsverhältnis ü =
L
1
-----1 ⋅ ---------------L2 1 – σ
Somit wird die Querspule üM = L 1 und
die rechte Längsspule wird
2
L1 L2
σ
2
ü L 2 – üM = ------------- – L 1 = L 1 ( ( L 1 L 2 ) ⁄ M – 1 ) = L 1 -----------2
1–σ
M
2
Lineare Zweipole und Zweitore
Seite 233
Man nennt dieses spezielle Ersatzschaltbild : Γ -Ersatzschaltbild
L1
σ
L 1 ⋅ -----------1–σ
ü
--- =
1
L L1 L2
-----1 ---------------L2 M
2. Spezialfall: L – üM = ü 2 L – üM
1
2
2
Dann wird L 1 = ü L 2 und das
Übersetzungsverhältnis ü =
L1 ⁄ L2
Die Induktivitäten der Längsspulen sind dann gleich und betragen
L 1 ⁄ L 2 ⋅ M
M
L 1 – üM = L 1 1 – ---------------------------- = L 1 1 – ----------------
L1
L1 L2
2
oder mit σ = ( 1 + M ⁄ ( L 1 L 2 ) )
L 1 – üM = L 1 ( 1 – 1 – σ )
Die Induktivität der Querspule ist
L1 ⁄ L2 ⋅ M ⋅ L1
L1 M
üM = --------------------------------------- = --------------- oder
L1
L1 L2
üM = L 1 1 – σ
Man nennt dieses spezielle Ersatzschaltbild T -Ersatzschaltbild
L1 ( 1 – 1 – σ )
L1 ( 1 – 1 – σ )
L1 1 – σ
ü⁄1 =
L1 ⁄ L2
Seite 234
GET-Skript
2
3. Spezialfall: ü L 2 – üM = 0
d.h. die rechte Längsspule verschwindet.
Dann wird
M
ü = ----- =
L2
L M
-----1 ---------------- =
L2 L L
1 2
L
-----1 ⋅ 1 – σ
L2
und die linke Längsspule
2
M
L 1 – üM = L 1 1 – ------------ = L 1 σ
L 1 L 2
sowie die Querspule
2
M
M ⋅ M L1
---------------------------- = L1 ( 1 – σ )
⋅
üM =
= L1
L1
L1 L2
L2
L
Man nennt diese Schaltung
-Ersatzschaltbild des Übertragers.
L1 σ
L1 ( 1 – σ )
ü
--- =
1
L
-----1 1 – σ
L2
Unter Benutzung dieser Ersatzschaltung kann man bereits einige
Aussagen zur Eingangsimpedanz eines verlustfreien Übertragers
machen:
Zunächst kann der nachgeschaltete ideale Übertrager nur die Übersetzung ü bzw. Klemmenvertauschung bescheiben. Die Eingangsimpedanz des idealen Übertragers für sich allein ist gegeben durch
Z 11 bzw. Y 11 und man erhält bei
- leerlaufendem Ausgang: (es fließt kein Eingangsstrom)
A 11
ü
Z 1ideal = Z 11 = ------- = --- → ∞
0
A 21
- kurzgeschlossenem Ausgang: (es fließt ein unendlich großer
Eingangsstrom)
A 12
1
0
Z 1ideal = -------- = ------- = ---------- = 0
1ڟ
Y 11
A 22
Lineare Zweipole und Zweitore
Seite 235
Für die Eigangsimpedanz des gesamten verlustfreien Übertragers
erhält man dann:
- Leerlaufender Ausgang:
der ideale Übertrager entfällt im Ersatzschaltbild, weil
Z 1ideal → ∞ und es wird Z 1 = jωL 1 , d.h. es fließt Magnetisierungsstrom.
- Kurzgeschlossener Ausgang:
der ideale Übertrager wird im Ersatzschaltbild durch einen
Kurzschluß ersetzt ( Z 1ideal = 0 ) Z 1 = jωσL 1 wird also nicht
Null wie beim idealen Übertrager.
Bei Streuung σ → 0 sind alle drei Spezialfälle gleich, nämlich
L1
ü
--- =
1
L
-----1
L2
10.6.3 Der Übertrager mit Eisenkern
Vorteile des Eisenkerns
- Es läuft praktisch der gesamte Fluß zwangsläufig durch beide
Spulen (großer Koppelfaktor k , kleiner Streuung σ ).
- Mit wachsender Permeabilität wird L 1 und damit Z 1 größer,
d. h. der Magnetisierungsstrom nimmt ab.
Symmetrisches T -Ersatzschaltbild:
L1 σ ⁄ 2
L1 ( 1 – σ ⁄ 2 )
L1 σ ⁄ 2
ü =
L
-----1
L2
Seite 236
GET-Skript
Bei sehr kleinem σ gilt näherungsweise: 1 – σ ≈ 1 – σ ⁄ 2 und
die Induktivitäten werden L 1 ( 1 – 1 – σ ) = L 1 σ ⁄ 2 für die
Längsspulen
Querspulen: L 1 1 – σ = L 1 ( 1 – σ ⁄ 2 )
Anschaulich: L 1 σ ⁄ 2 in den Längsspulen entspricht den Streuflüssen, die nur mit jeweils einer Wicklung verkettet sind und außerhalb des Eisens verlaufen.
L 1 ( 1 – σ ⁄ 2 ) entspricht dem gemeinsamen Fluß durch beide Spulen, im wesentlichen innerhalb des Eisenkerns.
Mit wachsender Permeabilität nimmt die Induktivität der Querspule zu, die der Längsspulen nicht (Streufluß!), d.h. σ wird bei großer Permeabilität kleiner.
10.6.4 Übertrager mit Verlusten
Bisherige Betrachtungen galten für verlustfreien Transformator.
Jetzt: Versuch, die Verluste zu berücksichtigen.
- Ohm‘scher Widerstand
Widerstand R 1 der Primärwicklung in Reihe mit der linken
Längsspule. Widerstand R 2 der Sekundärspule in Reihe mit der
2
Ausgangswicklung des idealen Übertragers oder ü R 2 in Reihe mit der rechten Längsspule des T -Gliedes.
- Wirbelströme
2 2
Sie entziehen eine Leistung P w ∼ ω B̂ . Diese Leistung P w
wird richtig dargestellt durch einen Widerstand R w parallel zur
Querspule; denn die Spannung an der Querspule ist
u = Z ⋅ i ∼ ω ⋅ B̂ und die Leistung in R w ist
2
2
2
P Rw ∼ u ⁄ R ∼ ω ⋅ B̂ Die Leistung P Rw am Widerstand Rw
verhält sich also wie die von Wirbelströmen entzogene Leistung
Pw
- Hystereseverluste
Diese kommen mit jeder Ummagnetisierungs zustande und sind
proportional zu ω . Die Abhängigkeit von B̂ ist nicht linear. Hystereseverluste können also nicht allgemein durch einen Widerstand beschrieben werden.
Aber: Für festes ω und festes B̂ (wie in der Energietechnik)
sind Hystereseverluste konstant und können dann auch durch
einen Widerstand parallel zu R w beschrieben werden.
Lineare Zweipole und Zweitore
Seite 237
So ergibt sich das Ersatzschaltbild für einen verlustbehafteten
Trafo:
I1
U1
R1 L 1 σ ⁄ 2
L1 ( 1 – σ ⁄ 2 )
L1 σ ⁄ 2
R2
RW
ü =
I2
L
-----1
L2
U2
ü/1
10.6.5 Die Transformationseigenschaften des Übertragers
Wir betrachten ab jetzt wieder den verlustfreien Übertrager. Es interessieren die Zusammenhänge zwischen Eingangs- und Ausgangsimpedanz Z 1 und Z 2 .
L1 σ
Z1
L1 ( 1 – σ )
L
Wir verwenden das einfache
-Ersatzsschaltbild.
I' 2
ü/1
I2
U' 2
Z2 U2
Durch Vergleich der Ströme und Spannungen am Ein- und Ausgang des idealen Übertragers im Ersatzschaltbild sieht man, daß
man die Last Z 2 am Ausgang des idealen Übertragers durch die
2
Last Z' 2 = ü Z 2 am Eingang ersetzen und den idealen Übertrager
ganz weglassen kann.
Es ist nämlich U ′ 2 ⁄ U 2 = ü oder U ′ 2 = üU 2
Weil die Ausgangs- und Eingangsleistung am idealen Übertrager
gleich
sein
müssen,
ist
bzw.
U ′2 ⋅ I ′2 = U 2 ⋅ I 2
I ′ 2 ⁄ I 2 = U 2 ⁄ U ′ 2 = 1 ⁄ ü , also I ′ 2 = I 2 ⁄ ü .
Dann ist aber
üU
2
Z ′ 2 = U ′ 2 ⁄ I ′ 2 = -----------2 = ü ⋅ Z 2
I2 ⁄ ü
Seite 238
GET-Skript
2
L
Mit Z' 2 = ü Z 2 auf Ausgangsseite des -Glieds und nach Weglassen des idealen Übertragers erhält man dann folgendes gleichwertiges Ersatzschaltbild, aus dem der Zusammenhang zwischen
Ausgangs- und Eingangsimpedanz sofort ersichtlich ist.
L1 σ
Z1
2
L1 ( 1 – σ )
ü Z2
Zu einer Ausgangsimpedanz (Abschlußwiderstand) Z 2 gehört
also die Eingangsimpedanz Z 1 , wobei allgemein gilt:
1
Z 1 = jωσL 1 + ------------------------------------------------1
1
----------+ -----------------------------2
jωL
(
1 1 – σ)
ü Z2
Natürlich sind die bereits betrachteten Fälle Leerlauf bzw. Kurzschluß am Ausgang Spezialfälle dieses allgemeinen Zusammenhangs:
Kurzschluß ( Z 2 = 0 ) → Z 1 = jωσL 1
Leerlauf ( Z 2 → ∞ ) → Z 1 = jωL 1
Z 1 = f ( Z 2 ) kann man mit einer Ortskurve darstellen.
Im
jωL1
Z2 → ∞
belieb.Z2
jωσL1
Z2=0
Re
![Elektrische Spannung U [V]](http://s1.studylibde.com/store/data/002479720_1-141ad09aa3ab46fc5af48362f775ec08-300x300.png)