Technische Mechanik 3
Werbung

Technische Mechanik 3
2. Kinematik eines Massenpunktes
2.1. Grundbegriffe, kartesische Koordinaten
2.2. Geradlinige Bewegung
2.3. Ebene Bewegung, Polarkoordinaten
2.4. räumliche Bewegung, natürliche Koordinaten
2.5. Relativbewegung,
Bewegtes Koordinatensystem
2.1. Grundbegriffe - Ortsvektor
●
●
Beschreibung der Bewegung eines Punktes
im Raum – Kinematik
Kinematik – nur Geometrie der
Bewegungen, keine Bewegungsursache
●
Punkt P bewegt sich im Raum
●
Ortsvektor des Punktes P:
r ≡r
●
r t beschreibt die Bahn des Punktes P
●
Dimension von r : [m], [km], ....
TM3, SS 2016
R. Kral / G. Kolarov
2
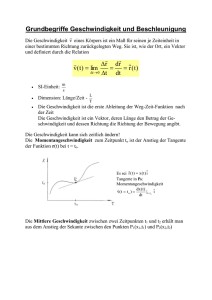
Geschwindigkeit
●
●
●
zwei benachbarte Lagen P und P´
P - zur Zeit t ; P´ - zur Zeit t t
Die Geschwindigkeit ist der Grenzwert
der zeitlichen Änderung des Ortsvektors
v= lim
t0
⇒
r t t−r t
t
v= lim
t0
●
●
r d r
=
= ṙ
t d t
Die Geschwindigkeit ist ein Vektor
Die Geschwindigkeit zeigt stets tangential zur Bahn und
in Richtung der Bewegung
TM3, SS 2016
R. Kral / G. Kolarov
3
Geschwindigkeit
●
Für beliebige Größe b mit
ḃ -Ableitung nach der Zeit
db
= ḃ
dt
●
Dimension: [m/s], [km/s], [km/h], ...
●
Umrechnung: 1
●
●
●
km 1000 m 1 m
m
km
=
=
oder 1 = 3,6
h
3600 s 3,6 s
s
h
Maß für zurückgelegten Weg (Strecke): s (skalare Größe)
Betrag von r : ∣ r∣= s
Betrag von
v : ∣ v∣=v= lim
t0
TM3, SS 2016
s ds
= = ṡ
t dt
R. Kral / G. Kolarov
4
Beschleunigung
●
●
Geschwindigkeit ändert sich mit der Zeit
Die Beschleunigung ist die Ableitung der
Geschwindigkeit nach der Zeit:
v t t −v t
a= lim
t
t 0
⇒
a= lim
t 0
v d v
=
= v̇= r̈
t
dt
●
Die Beschleunigung ist ein Vektor
●
Dimension:
TM3, SS 2016
[]
m
2
s
R. Kral / G. Kolarov
5
Geschwindigkeit und Beschleunigung
in kartesische Koordinaten
●
●
raumfestes Koordinatensystem mit
Einheitsvektoren (Basisvektoren)
e x , e y , e z hängen nicht von der Zeit t ab.
=> Inertialsystem
●
Ortsvektor (Parameterdarstellung der Bahn):
r t=x t⋅e x y t⋅e y z t⋅e z
●
Geschwindigkeit
(durch Ableiten nach t)
●
Beschleunigung
(2. Ableitung nach t)
TM3, SS 2016
v t = ṙ t= ẋ t ⋅e x ẏ t ⋅e y ż t ⋅e z
at = v̇ t = r̈ t = ẍ t ⋅e x ÿ t ⋅e y z̈ t ⋅e z
R. Kral / G. Kolarov
6
Geschwindigkeit und Beschleunigung
in kartesische Koordinaten
●
Komponenten der Geschwindigkeit:
v x = ẋ , v y = ẏ , v z = ż
●
Betrag der Geschwindigkeit:
∣v∣=v= ẋ 2 ẏ 2 ż 2
●
●
Komponenten der Beschleunigung:
a x = ẍ , a y = ÿ , a z = z̈
Betrag der Beschleunigung:
∣a∣=a= ẍ 2 ÿ 2 z̈ 2
TM3, SS 2016
R. Kral / G. Kolarov
7
2.2 Geradlinige Bewegung
●
einfachste Form der Bewegung
●
große praktische Bedeutung
●
nennen Sie Beispiele...
x−Achse entlang der Bewegungsgeraden
●
r , v , a - nur x -Komponenten, kann skalar geschrieben werden.
●
xt , v t= ẋ ,
a t= v̇ = ẍ
●
wenn v , a negativ – in die negative x-Richtung
●
wenn a 0 => Verzögerung
TM3, SS 2016
R. Kral / G. Kolarov
8
Kinematische Grundaufgaben
●
Gegeben: Weg xt
⇒ Gesucht: v t , a t
=> Lösen durch Differenzieren, relativ einfach
●
Gegeben: Beschleunigung a t
⇒
Gesucht: v t , x t
=> Lösen durch Integration, mathematisch schwieriger
●
●
allgemein: a=a t , v , x
Wir betrachten nur Fälle, bei denen a nur von einer Größe
abhängt:
—
a = at : 1. a = 0 , 2. a = a 0 , 3. a = a t
4. a = a v
—
5. a = a x
—
TM3, SS 2016
R. Kral / G. Kolarov
9
Kinematische Grundaufgaben – 1. a = 0
a t = v̇ =
●
●
●
dv
=0
dt
v = v 0 = const.
⇒
gleichförmige Bewegung
x t - durch Integration von v
dx
v = v0 =
dt
Es ist eine Zusatzbedingung erforderlich, in der Regel
Anfangsbedingung.
⇒ Für t = t 0 ist x = x t 0 = x 0
Je nach Problem kann man bestimmt oder unbestimmt integrieren.
TM3, SS 2016
R. Kral / G. Kolarov
10
Kinematische Grundaufgaben – 1. a = 0
a) unbestimmte Integration
●
Trennen der Variablen
∫ dx = ∫ v 0 dt
●
v = v0 =
⇒
dx
dt
⇔
dx=v 0 dt
x = v 0⋅tC 1
aus Anfangsbedingung x t=t 0 =v 0⋅t 0C 1 = x0 ⇒ C 1= x 0−v 0⋅t 0
xt = x0 v 0⋅t−t 0
x
t
∫ d x = ∫ v 0 d t
b) bestimmte Integration
x0
x− x 0 = v 0⋅t−t 0
TM3, SS 2016
Unterscheidung zwischen
der Variablen und der
oberen Grenze
⇔
t0
x t = x 0 v 0⋅t−t 0
R. Kral / G. Kolarov
11
Kinematische Grundaufgaben – 2. a = a0
●
gleichmäßig beschleunigte Bewegung
●
Anfangsbedingungen für t 0 = 0 (zweckmäßig):
ẋ 0 = v 0
●
x 0 = x 0
Geschwindigkeit
v
dv = a 0⋅dt
⇒
t
∫ d v = ∫ a0 d t
v0
●
⇒
v t = v 0 a 0⋅t
0
Weg
x
dx = v⋅dt ⇒
∫ d x = ∫ v 0a 0⋅t d t ⇒
x0
TM3, SS 2016
t
0
R. Kral / G. Kolarov
1
x t = x 0v o⋅t a 0⋅t 2
2
12
Kinematische Grundaufgaben – 2. a = a0
a t = a 0
a-t-Diagramm
TM3, SS 2016
v t = v 0 a 0⋅t
v-t-Diagramm
R. Kral / G. Kolarov
a0 2
x t = x 0v 0⋅t ⋅t
2
x-t-Diagramm
13
2. a = a0 - Beispielaufgabe
●
●
Beispiele:
—
freier Fall
—
senkrechter Wurf
(ohne Luftwiderstand)
Beispielaufgabe: Freier Fall aus Höhe H
ohne Anfangsgeschwindigkeit
—
—
Gegeben:
H = 12 m (4. Stock) ,
g=9,81
Gesucht: Aufprallgeschwindigkeit
TM3, SS 2016
R. Kral / G. Kolarov
m
s2
14
Kinematische Grundaufgaben – 3. a = a(t)
●
Anfangsbedingungen:
v t 0 = v 0 ,
●
x t 0 = x 0
Geschwindigkeit durch Integration
t
dv = a t ⋅dt
⇒
v t = v 0 ∫ a t d t
t0
●
Weg – nochmalige Integration
t
dx = v t ⋅dt
⇒
x t = x 0∫ v t d t
t0
●
Beispiel
TM3, SS 2016
R. Kral / G. Kolarov
15
Kinematische Grundaufgaben – 4. a = a(v)
●
Beschleunigung ist Funktion der Geschwindigkeit,
z.B. Strömungswiderstand
v t 0 = v 0 ,
x t 0 = x 0
●
Anfangsbedingungen:
●
Geschwindigkeit durch Trennen der Variablen
dv
a v =
dt
●
⇒
dv
dt =
a v
bestimmte Integration
t
v
∫ d t = ∫
t0
TM3, SS 2016
v0
d v
a v
v
⇒
t = t 0∫
v0
R. Kral / G. Kolarov
d v
= f v
a v
16
Kinematische Grundaufgaben – 4. a = a(v)
●
Wenn man nach v auflösen kann
v = F t
(F ist Umkehrfunktion zu f)
●
folgt für den Weg:
t
x t = x 0∫ F t d t
t0
●
oder direkt x(v) mit der Kettenregel
dx =
TM3, SS 2016
v
dv
a
v
⇒
x v = x 0∫
v0
R. Kral / G. Kolarov
a=
dv dv dx dv
=
=
v
dt
dx dt
dx
v
d v
a v
17
4. a = a(v) - Beispiel
●
Bewegung von Körpern in reibungsbehafteten Flüssigkeiten
●
Gegeben: a = −k⋅v , k − bekannte Konstante
●
Anfangsbedingungen:
v 0 = v 0 ,
●
x 0 = x 0
Gesucht:
v t , x t , x v sowie
a t−, v t − , x t −Diagramme
TM3, SS 2016
R. Kral / G. Kolarov
18
Kinematische Grundaufgaben – 5. a = a(x)
●
Beschleunigung ist eine Funktion des Weges.
●
Anfangsbedingungen:
●
Geschwindigkeit mit der Kettenregel
a=
●
●
v t 0 = v 0 ,
x t 0 = x 0
dv
dv dx
dv
=
=
v
dt
dx dt
dx
Trennen der Variablen
v⋅dv = a x⋅dx
x
1 2 1 2
v = v 0∫ a x d x = f x
2
2
x
Integration
0
⇒
TM3, SS 2016
v x = 2⋅f x
R. Kral / G. Kolarov
19
Kinematische Grundaufgaben – 5. a = a(x)
●
dx
Aus v =
dt
durch Trennen der Variablen und Integration
dx
dx
dt =
=
v
2⋅f x
●
x
⇒
t x = t 0 ∫
x0
d x
= g x
2⋅f x
Wenn man g x nach x auflösen kann
( G ist Umkehrfunktion zu g ):
x = G t
TM3, SS 2016
R. Kral / G. Kolarov
20
5. a = a(x) - Beispiel
●
Harmonische Schwingung
●
Gegeben: a = − ⋅x ,
●
Anfangsbedingungen:
2
v 0 = 0 ,
●
− bekannte Konstante
x 0 = x 0
Gesucht:
v x , t x , x t , v t , a t sowie
x t− , v x−Diagramme
TM3, SS 2016
●
R. Kral / G. Kolarov
21
2.3. Ebene Bewegung, Polarkoordinaten
●
Koordinaten r ,
●
Basisvektoren e r ⊥ e , ∣e r∣=∣e ∣ = 1
●
e r zeigt immer auf den Punkt P
●
Ortsvektor: r = r⋅e r
●
Die Richtungen von e r und e sind zeitabhängig!
●
e r t , e t werden mitdifferenziert.
TM3, SS 2016
R. Kral / G. Kolarov
22
2.3. Ebene Bewegung, Polarkoordinaten
●
Änderung von e r und e - nur Drehung
d e r t = d ⋅d e t ⇒
d e t = −d ⋅d e r t ⇒
TM3, SS 2016
d er
d
e˙r =
=
e = ̇⋅e
dt
dt
d e
d
e˙ =
=−
e r = −̇⋅e r
dt
dt
R. Kral / G. Kolarov
23
Geschwindigkeit – allg. ebene Bewegung
●
Durch Differenzieren
v = ṙ = ṙ⋅e r r⋅ė r
v = ṙ = ṙ⋅e r r⋅̇⋅e
v r = ṙ
●
radiale Komponente:
●
zirkulare Komponente: v = r⋅̇
●
v ⊥ r , i.a. nicht tangential zur Bahn
●
Winkelgeschwindigkeit
TM3, SS 2016
= ̇
[] =
R. Kral / G. Kolarov
1
s
24
Beschleunigung – allg. ebene Bewegung
●
Durch Differenzieren von v = ṙ = ṙ⋅e r r⋅̇⋅e
a = v̇ = r̈⋅e r ṙ⋅ė r ṙ⋅̇⋅e r⋅̈⋅e r⋅̇⋅ė
a = r̈−r⋅̇ 2 ⋅e r r⋅̈2⋅ṙ ̇⋅e
a r = r̈−r⋅̇ 2
●
radiale Komponente:
●
zirkulare Komponente: a = r⋅̈2⋅ṙ⋅̇
●
●
a ⊥ r , i.a. auch nicht tangential zur Bahn
Winkelbeschleunigung ̇ = ̈ [ ̈] = 1
s2
TM3, SS 2016
R. Kral / G. Kolarov
25
Beispiel - allg. ebene Bewegung
●
Eine Stange der Länge l rotiert um A mit dem Zeitgesetz
= k⋅t 2
●
Auf der Stange rutscht ein Gleitkörper nach dem Gesetz
r = l⋅1−k⋅t 2
●
Gegeben:
●
Gesucht:
l = 2 m , k = 0,2 s−2
°
Geschwindigkeit und Beschleunigung für 1 = 45
TM3, SS 2016
R. Kral / G. Kolarov
26
Sonderfall - Kreisbewegung
●
r = const
r = r⋅e r ,
●
ṙ = 0
v=r⋅⋅e ,
a=−r⋅ 2⋅e r r⋅̇⋅e
Geschwindigkeit
—
nur zirkulare Komponente:
v = v = r⋅
●
●
●
Beschleunigung:
—
in tangentialer Richtung:
—
in radialer Richtung:
a = r⋅̇
a r = −r⋅2
Spezialfall = const
v2
2
v = r⋅ , a = 0 , aber a r = −r⋅ =−
r
ar bewirkt Änderung der Richtung der Geschwindigkeit.
TM3, SS 2016
R. Kral / G. Kolarov
27
Beispiel - Kreisbewegung
●
Beispiel:
= const
●
Beispiel:
̇ = ̈ = const
TM3, SS 2016
R. Kral / G. Kolarov
28
Sonderfall - Zentralbewegung
●
Beschleunigungsvektor ist stets auf einen
Punkt, das Zentrum gerichtet
●
●
●
Koordinatenursprung in Z
dann Zikularkomponente a = 0
1 d 2
a = 0 = r⋅̇2⋅ṙ⋅ =
r ⋅ = 0
r dt
r 2⋅ = const
anschauliche Interpretation:
—
—
—
1
r⋅r⋅d
r überstreicht in der Zeit dt die Fläche
2
2
dA 1 r ⋅d 1 2 2
Flächengeschwindigkeit
=
= r =const
dt
2 dt
2
dA =
entspricht 2. Keplerschen Gesetz für Planetenbewegungen
TM3, SS 2016
R. Kral / G. Kolarov
29
2.5. Räumliche Bewegung
●
In kartesischen Koordinaten (raumfestes System):
r t = x t ⋅e x y t ⋅e y z t ⋅e z
v t = ṙ = ẋ t ⋅e x ẏ t ⋅e y ż t ⋅e z
at = v̇ = r̈ = ẍ t⋅e x ÿ t ⋅e y z̈ t ⋅e z
●
In zylindrischen Koordinaten, e z − unabhängig von der Zeit,
r ist die Projektion von r in der x-y-Ebene:
r = r⋅e r z⋅e z
v = ṙ = ṙ⋅e r r⋅̇⋅e ż t ⋅e z
at = v̇ = r̈ = r̈−r⋅̇2 e r r⋅̈2⋅ṙ⋅̇ e z̈⋅e z
TM3, SS 2016
R. Kral / G. Kolarov
30
Räumliche Bewegung –
natürliche Koordinaten
●
Mitbewegtes Koordinatensystem:
e t − in Tangentialrichtung
e n − in Richtung der Hauptnormalen
e b − in Richtung der Binormalen
(begleitendes Dreibein)
●
Tangente und Hauptnormale liegen in
der sogenannten Schmiegungsebene mit Radius ρ
und Krümmungsmittelpunkt M
●
Mit Bogenlänge st: r=r s t
∣d r∣ = ds , d r− tangential d r=ds⋅e t
TM3, SS 2016
R. Kral / G. Kolarov
31
Räumliche Bewegung –
natürliche Koordinaten
●
Geschwindigkeit:
d r d r ds
v t = ṙ =
=
dt ds dt
v = ∣v∣ =
ds
= ṡ
dt
v = v⋅e t
●
●
zeitliche Änderung der Einheitsvektoren
(analog polare Koordinaten):
d e t 1 ds
ds
v
d e t = d ⋅e n = e n , ė t =
=
en = en
dt dt
Beschleunigung:
a = v̇ = v̇⋅e tv⋅ė t =a t⋅e t a n⋅e n
TM3, SS 2016
R. Kral / G. Kolarov
v2
a= v̇⋅e t e n
32
Räumliche Bewegung –
natürliche Koordinaten
●
●
Bahnbeschleunigung in Richtung
der Tangente
Normalbeschleunigung in
Richtung der Hauptnormalen
a t = v̇
2
v
an =
vgl. Sonderfall Kreisbewegung
v = ṡ = r⋅
a t = v̇ = r⋅̇ = r⋅̈
v2
a n = = r⋅ 2
r
TM3, SS 2016
R. Kral / G. Kolarov
33
Räumliche Bewegung – natürliche
Koordinaten
●
●
Analogie zwischen den kinematischen Größen
gradlinige Bewegung
räumliche Bewegung in
natürlichen Koordinaten
x
s
v = ẋ
v = ṡ
a = v̇ = ẍ
a = v̇ = s̈
Formeln für die Fälle a(t), a(v), a(x) können für at angewendet
werden.
TM3, SS 2016
R. Kral / G. Kolarov
34
Beispiel – natürliche Koordinaten
●
P bewegt sich in der x-y-Ebene auf der
Bahnkurve y(x):
y=
●
Gegeben: Konstante Geschwindigkeit v 0
●
Allgemeiner Krümmungsradius in der Ebene:
1
=
●
2
x
2
d2 y
dx 2
2 3
2
[ ]
dy
1
dx
Gesucht: Beschleunigung
TM3, SS 2016
R. Kral / G. Kolarov
35
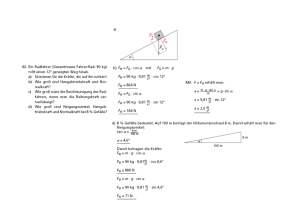
Beispiel Kreisbahn in natürlichen Koordinaten
●
Auf einer vertikalen Kreisbahn geführter Massenpunkt
wird in A aus der Ruhelage losgelassen.
●
Gegeben: g , R
●
Gesucht:
Geschwindigkeit und Beschleunigung f
TM3, SS 2016
R. Kral / G. Kolarov
36
2.5. Relativbewegung
Bewegtes kartesisches Koordinatensystem
●
●
●
●
Für einige Bewegungen ist es zweckmäßig, den Ort, etc.
auf ein bewegtes Koordinatensystem zu beziehen.
●
Person im Flugzeug / auf Schiff, etc.
●
Robotik
xyz-System ist raumfest
-System bewegt sich in Bezug
auf das ruhende xyz-System nur
translatorisch
Ortsvektor:
r = r 0 r 0P
TM3, SS 2016
R. Kral / G. Kolarov
37
Translatorisch bewegtes
Koordinatensystem
r = r 0r 0P
●
Darstellung der Vektoren in den
Koordinatensystemen
r = x⋅e x y⋅e y z⋅e y
r 0P = ⋅e ⋅e ⋅e
Nur Translation:
e , e , e − unabhängig von t
v a = ṙ = ṙ 0 ṙ 0P
●
Absolutgeschwindigkeit:
●
Führungsgeschwindigkeit: v f = ṙ 0
●
Relativgeschwindigkeit:
TM3, SS 2016
v a = v f v r
v r = ṙ 0P
R. Kral / G. Kolarov
38
Translatorisch bewegtes
Koordinatensystem
Beschleunigung (erneutes Ableiten)
●
●
●
Absolutbeschleunigung:
a a = v̇ = r̈ 0 r̈ 0P
Führungsbeschleunigung:
a f = r̈ 0
Relativbeschleunigung:
a r = r̈ 0P
Damit Absolutbeschleunigung
a a = a f a r
Zur Erinnerung:
Da sich die Einheitsvektoren nicht verändern, verschwindet ihre Ableitung.
TM3, SS 2016
R. Kral / G. Kolarov
39
Beispiel – Verschiebung
●
●
●
Der Nullpunkt des bewegten
Koordinatensystems bewege sich
auf einer Kreisbahn, Radius R, in
der Ebene z = 0.
Gegeben:
rad
R = 5m , = ⋅t , =2
,
s
T
r 0P= 1m ; 3m ; 0 m
Gesucht: r t , v t , a t
TM3, SS 2016
R. Kral / G. Kolarov
40
Koordinatentransformation bei
Drehung des Koordinatensystems
●
●
●
●
e , e , e hängen von t ab.
ξηζ-System dreht sich mit der
Winkelgeschwindigkeit ω
Hier nur Drehung um die z-Achse.
Die Komponentendarstellung des (Orts-)
Vektors hängt von der Basis bzw. dem
Koordinatensystem ab
xP
Basis {e x , e y , e z } : r = y P
zP
TM3, SS 2016
xyz
P
Basis {e , e , e } : r = P
P
R. Kral / G. Kolarov
41
Koordinatentransformation bei Drehung
des Koordinatensystems
●
Wir suchen die Transformation r xyz = T⋅r
Zunächst Projetion der Koordinaten , , auf x , y , z :
⋅e =⋅cos e x ⋅sin e y 0⋅e z
⋅e =−⋅sin e x ⋅cos e y 0⋅e z
⋅e =0⋅e x 0⋅e y ⋅e z
●
In Matrixform erhält man somit:
xP
r = yP
zP
cos −sin 0 P
= sin cos 0 ⋅ P
0
0
1 P
xyz
r xyz =T⋅r
TM3, SS 2016
R. Kral / G. Kolarov
42
Koordinatentransformation bei Drehung
des Koordinatensystems
●
Entsprechend gilt für die Drehung um x:
xP
r = yP
zP
●
P
1
0
0
= 0 cos −sin ⋅ P
0 sin cos P
xyz
Drehung um die y-Achse:
xP
r = yP
zP
TM3, SS 2016
cos 0 sin P
=
0
1
0 ⋅ P
−sin 0 cos P
xyz
R. Kral / G. Kolarov
43
Eigenschaften der Transformationsmatrix
Für die Drehmatrix um eine Achse gilt:
●
●
●
Auf der Diagonalen stehen cos und 1
Auf den zu cos gehörenden Nebendiagonaleinträgen stehen
sin und −sin
T
−1
Die Transformationsmatrixen sind orthogonal. es gilt: T = T
Achtung: Endliche Drehungen sind keine Vektoren. Die
Reihenfolge der Drehungen hat einen Einfluss auf die Endlage.
Infinitesimale Drehungen und Winkelgeschwindigkeiten sind
Vektoren.
TM3, SS 2016
R. Kral / G. Kolarov
44
Translation und Rotation
des Koordinatensystems
●
●
●
Ortsvektor: r = r 0r 0P
e , e , e hängen von t ab.
ξηζ-System dreht sich mit der
Winkelgeschwindigkeit ω
●
Absolutgeschwindigkeit:
v a = ṙ = ṙ 0 ṙ 0P
mit r 0P = ⋅e ⋅e ⋅e folgt
ṙ 0P = ̇⋅e ̇⋅e ̇⋅e ⋅ė ⋅ė ⋅ė (Produktregel)
TM3, SS 2016
R. Kral / G. Kolarov
45
Translation und Rotation
des Koordinatensystems
●
●
●
●
zeitliche Änderung der Einheitsvektoren:
ė = ×e , ė = ×e , ė = ×e
damit ⋅ė ⋅ė ⋅ė
= ⋅×e ⋅×e ⋅×e
= × e e e = ×r 0P
insgesamt erhält man:
d r 0P
ṙ 0P =
= ̇⋅e ̇⋅e ̇⋅e ×r 0P
dt
erster Summand – zeitliche Ableitung von r 0P in Bezug auf das
bewegte -System:
d * r 0P
= ̇⋅e ̇⋅e ̇⋅e
dt
TM3, SS 2016
R. Kral / G. Kolarov
46
Translation und Rotation
des Koordinatensystems
●
d * r 0P
×r 0P
Damit ist ṙ 0P =
dt
●
Diese Formel gilt entsprechend für
beliebige Zeitableitungen von Vektoren.
●
*
d
r 0P
Absolutgeschwindigkeit:
v a = ṙ = v 0 ×r 0P
dt
v a = v f v r
mit v 0 = ṙ 0
●
Führungsgeschwindigkeit:
v f = v 0 ×r 0P
●
Relativgeschwindigkeit:
d * r 0P
vr =
= ̇⋅e ̇⋅e ̇⋅e
dt
TM3, SS 2016
R. Kral / G. Kolarov
47
Translation und Rotation
des Koordinatensystems
●
●
Absolutbeschleunigung: a a = v̇ a = v̇ f v̇ r = v̇ 0 d ×r 0P v̇ r
dt
zweiter Summand:
d
×r 0P = ̇×r 0P × ṙ 0P
dt
*
d r 0P
= ̇×r 0P×
×r 0P = ̇×r 0P×v r × ×r 0P
dt
●
dritter Summand:
●
mit v̇ 0=a 0 wird die Absolutbeschleunigung:
d * vr
v̇ r =
×v r
dt
d *vr
= ̈⋅e ̈⋅e ̈⋅e
dt
d * vr
a a = a 0 ̇×r 0P× ×r 0P
2⋅×v r
dt
TM3, SS 2016
R. Kral / G. Kolarov
48
Translation und Rotation
des Koordinatensystems
●
Absolutbeschleunigung:
a a = a f a r a c
●
Führungsbeschleunigung:
a f = a 0̇×r 0P× ×r 0P
●
Relativbeschleunigung:
d * vr
d 2 * r 0P
ar =
=
dt
dt 2
●
Coriolisbeschleunigung:
a c = 2⋅×v r
und v r
—
steht senkrecht auf
—
a c =0 , wenn mindestens eine der folgenden Bedingungen erfüllt ist:
–
=0
–
v r =0
–
∥v r (Winkelgeschwindigkeit und Relativgeschwindigkeit sind parallel.)
TM3, SS 2016
R. Kral / G. Kolarov
49
Sonderfall: Ebene Bewegung
●
●
●
Hier Drehung um z- oder ζ-Achse
= e = ⋅e z
Interpretation als Polarkoordinaten
möglich.
Mit r 0P = r⋅e r folgt :
×r 0P = r e ̇×r 0P = r ̇ e
2
× ×r 0P = −r ⋅e r
●
Führungsgeschwindigkeit:
v f = v0 r⋅⋅e
●
Führungsbeschleunigung:
a f = a 0r⋅̇⋅e −r⋅2⋅e r
TM3, SS 2016
R. Kral / G. Kolarov
50
Beispiel: Ebene Bewegung
●
Fahrgeschäft Krake
●
Kreisscheiben
TM3, SS 2016
R. Kral / G. Kolarov
51
Zusammenfassung
●
●
●
●
●
Die Kinematik beschreibt Bewegungen ohne auf die Ursachen
(Kräfte) einzugehen.
Aus dem Ort erhält man durch Ableiten nach der Zeit die
Geschwindigkeit und Beschleunigung
d r t
d 2 r t
v=
a = v̇ =
2
dt
dt
Mit den kinematischen Grundaufgaben können Bewegungen
berechnet werden, bei denen z.B. a(v) bekannt ist.
Bewegte Koordinatensysteme können die Beschreibung einer
Bewegung erleichtern.
Bei bewegten Koordinatensysteme treten neben der
Relativgeschwindigkeit (-beschleunigung) mit der Führungsgeschwingdigkeit (-beschleunigung) weitere Terme auf.
TM3, SS 2016
R. Kral / G. Kolarov
52