03-Kinetik des Massenpunktes
Werbung

3. Kinetik eines Massenpunktes
3.1. Grundgesetze
3.2. Freie Bewegung, schiefer Wurf
3.3. Geführte Bewegung
3.4. Widerstandskräfte
3.5. Impulssatz, Stoß
3.6. Momentensatz
3.7. Arbeitssatz, Potentielle Energie, Energiesatz
3.8. Prinzip von d'Alambert
3.9.Lagrangesche Gleichungen 2. Art
TM3, SS 2016
R. Kral / G. Kolarov
1
3.1. Grundgesetze
●
Bis jetzt: Nur kinematische Größen: Beschleunigung,
Geschwindigkeit, Weg
●
Kinetik: Verbindung Kräfte ↔ kinematische Größen
●
Modell ist zunächst (in Kap. 3) der Massenenpunkt.
●
Drei Newtonsche Grundgesetze (1687)
—
—
Zusammenfassung aller experiementeller
Erfahrungen
haben axiomatischen Charakter, können nicht
bewiesen werden
TM3, SS 2016
R. Kral / G. Kolarov
2
1. Newtonsches Gesetz
Wenn auf einen Massenpunkt keine Kraft wirkt, so
ist der Impuls konstant.
p = m⋅v = const
●
●
●
Der Impuls (Bewegungsgröße) ist ein Vektor.
Ein Massenpunkt führt eine geradlinige, gleichförmige
Bewegung aus, solange auf ihn keine resultierende Kraft wirkt.
Mit v = 0 (Körper bleibt in Ruhe) ist der Sonderfall der Statik
enthalten.
TM3, SS 2016
R. Kral / G. Kolarov
3
2. Newtonsches Gesetz
Die zeitliche Änderung des Impulses ist gleich der
auf den Massenpunkt wirkenden Kraft.
d m⋅v
d p
=
=F
dt
dt
dm
=0
dt
●
Wenn die Masse konstant ist
●
Masse * Beschleunigung = Kraft
●
●
●
bleibt:
dp
dv
=m
= m⋅a = F
dt
dt
[ ]
kg m
[N]=
Dimension der Kraft?
s2
Für F = 0 folgt das 1. Newtonsche Gesetz.
Auch dynamisches Grundgesetz oder Kräftesatz genannt.
TM3, SS 2016
R. Kral / G. Kolarov
4
2. Newtonsches Gesetz
Einschränkungen:
1. Gilt für ruhendes Bezugssystem
(Inertialsystem – reine Translation mit v = const)
—
Wenn kein Inertialsystem, siehe Relativbewegung
2. Gilt für Geschwindigkeiten, die viel kleiner sind, als die
Lichtgeschwindigkeit (c ≈ 300 000 km/s)
—
Gesetze der Relativitätstheorie anwenden
Körper in der Nähe der Erdoberfläche:
G = m⋅g , g=9,81
TM3, SS 2016
R. Kral / G. Kolarov
m
2
s
5
3. Newtonsches Gesetz
Zu jeder Kraft gibt es eine entgegengesetzt
gerichtete gleich große Gegenkraft
actio = reactio
●
Schnittprinzip
●
Freikörperbild
●
alle Aussagen über Kräfte aus TM1
TM3, SS 2016
R. Kral / G. Kolarov
6
3.2. Freie Bewegung
●
●
●
●
●
3 Bewegungsmöglichkeiten im Raum – 3 Freiheitsgrade
Zahl der Freiheitsgrade in der Ebene?
Wenn die Bewegung in keiner Richtung behindert wird –
freie Bewegung
Beschreibung durch die 3 Komponenten der Vektorgleichung:
F = m⋅a
Zwei Fragestellungen:
●
●
Wie groß sind die zur Bewegung notwendigen Kräfte, wenn
der Ablauf der Bewegung bekannt ist? Direkt aus F = m⋅a
Wie verläuft die Bewegung, wenn die Kräfte gegeben sind?
Aus F =m⋅a die Beschleunigung bestimmen, dann zweimal
integrieren, um Geschwindigkeit und Weg zu ermitteln.
TM3, SS 2016
R. Kral / G. Kolarov
7
Anwendung für freie Bewegung –
schiefer Wurf
●
●
●
●
Gegeben:
m abgeworfen bei t =0 unter Winkel
mit Geschwindigkeit v 0 . Ohne Luftwiderstand
Gesucht:
Bewegungsgleichungen, Bahngleichung,
Wurfweite x w , Wurfzeit t w , Wurfhöhe y h
Lösung: Einzige Kraft: G
Ebenes Problem – in z-Richtung alles¿= 0
m⋅ẍ = 0
m⋅ÿ = −G = −m⋅g
ẋ = C 1
ẏ = − g⋅t C 3
x = C 1⋅t C 2
1
y=− g⋅t 2C 3⋅tC 4
2
TM3, SS 2016
R. Kral / G. Kolarov
8
Anwendung für freie Bewegung –
schiefer Wurf
●
Anfangsbedingungen:
ẋ 0 = v 0 cos ⇒ C 1 = v 0 cos
x 0 = 0
⇒ C 2=0
ẏ 0 = v 0 sin
y 0 = 0
●
⇒ C 3 = v 0 sin
⇒ C 4 =0
Bewegungsgleichungen:
ẋ t = v 0 cos
x t = v 0 cos⋅t
TM3, SS 2016
ẏ t = − g⋅tv 0 sin
1
y t = − g⋅t 2v 0 sin ⋅t
2
R. Kral / G. Kolarov
9
Anwendung für freie Bewegung –
schiefer Wurf
●
Bahngleichung – quadratische Parabel
●
Elimination von t aus x(t) und y(t):
y x=−
●
g
2
x
tan ⋅x
2
2
2 v 0 cos
Wurfweite aus y x w = 0
2 v 02 cos 2 v 20 2sin cos v 20
x w = tan
=
= sin 2
g
g
g
sin 2 = sin −2 = sin 2 −
2
⇒ gleiche Wurfweite x w für zwei Winkel und ' = −
2
⇒ max. Wurfweite für = =45°
4
TM3, SS 2016
R. Kral / G. Kolarov
10
Anwendung für freie Bewegung –
schiefer Wurf
●
Wurfzeit
Einsetzen x w =x t w :
xw
v0
tw =
=2 sin
v 0 cos
g
●
●
Wurfzeit größer für Flach- oder Steilwurf?
dy
=0
Wurfhöhe y h aus
dx
dy
g
⇒
= − 2 2 x htan = 0
dx
v0 cos
1 v0
1
xh =
sin 2 = x w
2g
2
TM3, SS 2016
1
1
2
y h= y x h = v 0⋅sin =
[ ẏ 0]2
2g
2g
R. Kral / G. Kolarov
11
Beispiel schiefer Wurf
Von der Spitze eines Turmes wird eine Masse mit der Anfangsgeschwindigkeit v 0 und Winkel geworfen. Die Masse trifft bei L
auf.
●
Gegeben:
●
Gesucht:
v 0, L ,
―
Höhe des Turmes
―
Flugzeit
―
Aufschlaggeschwindigkeit
TM3, SS 2016
R. Kral / G. Kolarov
12
2.3 Geführte Bewegung
●
Massenpunkt ist gezwungen, sich auf einer vorgegebenen
Fläche oder Kurve zu bewegen
●
2 Freiheitsgrade – Zwang auf einer Fläche
●
1 Freiheitsgrad – Zwang auf einer Kurve
●
e
F
Eingeprägte Kräfte
●
Führungskräfte / Zwangskäfte F z
(z.B. Gewicht)
- Reaktionskräfte, ⊥ zur Bahn
●
●
Die Kräfte werden im Freikörperbild sichtbar und können
berechnet werden.
Dynamisches Grundgesetz:
TM3, SS 2016
e
m a = F F
R. Kral / G. Kolarov
z
13
Beispiel Zwangskräfte
●
●
Gegeben:
Masse m bewegt sicht auf einer
Halbkreisbahn mit Radius R
Anfangsgeschwindigkeit v 0 =0
Gesucht:
―
Freiheitsgrad
―
Freikörperbild
―
Gleichgewichtsbedingungen
―
Winkelbeschleunigung
―
Wingelgeschwindigkeit
―
Zwangskraft
TM3, SS 2016
R. Kral / G. Kolarov
14
Aufgabe geführte Bewegung
●
●
●
Kreisscheibe dreht sich in horizontaler Ebene mit 0 = const
Eine Masse m bewegt sich in einer glatten Schiene relativ zur
Scheibe mit v r = const
Gegeben:
0 , v r , m
●
Gesucht:
―
Welche Kräfte wirken auf die Masse?
TM3, SS 2016
R. Kral / G. Kolarov
15
3.4. Widerstandskräfte
●
●
●
Eingeprägte Kräfte, die durch die Bewegung entstehen und von
der Bewegung abhängen.
Beispiele:
—
Reibung
—
Strömungs- / Luftwiderstand
Coulombsche (Gleit-) Reibung (unabhängig von v)
R = ⋅N
TM3, SS 2016
R. Kral / G. Kolarov
16
Beispiel Reibung
●
●
Eine Masse bewegt sich auf einer rauen
schiefen Ebene (Winkel )
Gegeben:
Höhe h , , v 0 = 0
●
Gesucht:
—
Freikörperbild
—
Gleichgewichtsbedingungen
—
Zwangskraft
—
Beschleunigung, Geschwindigkeit, Weg
—
xE , t E , v E
TM3, SS 2016
R. Kral / G. Kolarov
17
Widerstandskräfte in Fluiden
●
Bekannt aus Experimenten
●
Kleine Geschwindigkeiten (laminare Strömung) F w = k⋅v
●
—
k hängt von der Körpergeometrie und der Zähigkeit η des Fluids ab
—
z.B. Kugel ( r ) :
F w = 6 v⋅r
(Stokes 1854)
Große Geschwindigkeiten (turbulente Strömung) F w = k⋅v 2
—
k hängt von der Körpergeometrie und der Dichte ρ des Fluids ab
As v2
2
A s - Projektion des Körpers ⊥ zur Anströmrichtung
F w = cw
—
—
—
c w - Widerstandskoeffizient
für moderne PKW ist c w 0,3
TM3, SS 2016
R. Kral / G. Kolarov
18
Beispiel freier Fall mit Luftwiderstand
●
Eine Masse wird in großer Höhe ohne
Anfangsgeschwindigkeit losgelassen.
●
Widerstandsgesetz (k – bekannt)
●
Gesucht:
—
Freikörperbild
—
Bewegungsgleichung
—
Gleichgewichtsbedingung v max
—
Geschwindigkeit
TM3, SS 2016
R. Kral / G. Kolarov
F w = k⋅v 2
19
Aufgabe Widerstandskräfte
●
●
m
v
=
3
= const
Gegeben: Förderband, F
s
Eine Kiste wird bei t = 0 in A auf das Band gesetzt
—
—
—
●
Gewicht G = m⋅g
m
horizontale Geschwindigkeit v 0 = 0,5
s
Reibungskoeffizient = 0,2
Gesucht:
—
Wie lange rutscht die Kiste?
—
Bis zu welchem Abstand von A rutscht die Kiste?
TM3, SS 2016
R. Kral / G. Kolarov
20
3.5. Impulssatz, Stoß
●
Integration des Newtonschen Grundgesetzes über die Zeit Impulssatz:
d m v
=F
dt
t
⇒
m⋅v−m⋅v 0 = ∫ F d t
t0
●
Die Änderung des Impulses = Zeitintegral der Kraft
●
Wenn F = 0 , dann Impulserhaltung: p = m⋅v = m v 0 = const
●
Häufige Anwendung Stoßvorgänge
●
Beim Stoß wirkt eine sehr große Kraft in sehr kurzer Zeit (tS).
●
Die Masse erfährt eine plötzliche Geschwindigkeitsänderung.
●
Lageänderung ist vernachlässigbar.
TM3, SS 2016
R. Kral / G. Kolarov
21
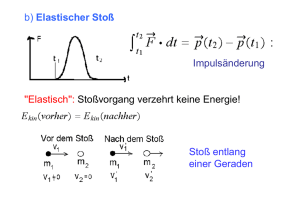
Impulssatz, Stoß
tS
●
Kraftstoß (Stoßkraft):
m⋅v 0 F = m⋅v
F = ∫ F d t
0
(Impuls vor Stoß + Kraftstoß = Impuls nach Stoß)
●
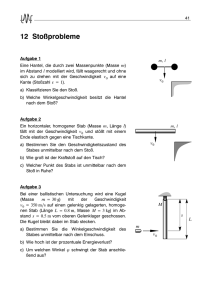
●
Masse m trifft schräg auf die Wand auf.
Impuls in Komponenten:
p x : m⋅v x F x = m⋅v x
v x =−v cos
v x = v cos
●
p y : m⋅v y F y = m⋅v y
v y =v sin
v y =v sin
Bei glatter Wand – keine Kraft in y-Richtung
F y = 0, v y = v y
TM3, SS 2016
R. Kral / G. Kolarov
22
Impulssatz, Stoß
●
●
●
●
Teilen des Stoßes (x-Richtung) in:
—
Kompressionsphase
—
Restitutionsphase
Impulssatz für beide Phasen:
Kompression: m⋅v x F K = m⋅0
Restitution:
m⋅0 F R = m⋅vx
2 Gleichungen, 3 Unbekannte F K , F R , vx
zusätzliche Gleichung aus Hypothese über
Verformungsverhalten während der Restitution
TM3, SS 2016
R. Kral / G. Kolarov
23
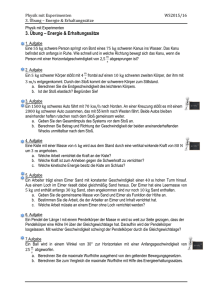
a) vollkommen elastischer Stoß
●
●
Kompressions- und Restitutionsfase
verlaufen spiegelbildlich
Masse nimmt ihre ursprüngliche Form
wieder an.
F K = F R
m⋅v x = −m⋅v x ⇔
∣v∣ = ∣v∣
=
●
auch ideal-elastisch
●
reversibler Prozess
TM3, SS 2016
v x =−v x
R. Kral / G. Kolarov
24
b) vollkommen plastischer Stoß
●
●
Die gesamte Verformung aus der
Kompressionsphase bleibt erhalten.
Masse bleibt plastisch verformt.
F R = 0
=
v x = v cos = 0
2
v y = v y , hier v y ≠0
●
auch ideal-plastisch
●
kein reversibler Prozess
TM3, SS 2016
R. Kral / G. Kolarov
25
c) teilelastischer Stoß
●
●
●
●
●
●
Ein realer Körper wird nur teilweise
zurückverformt.
Beschreibung durch Stoßzahl e:
F R = e⋅F K
ideal-elastisch: e = 1
ideal-plastisch: e = 0
0 e 1 ⇒ m v x = e −m v x
teilelastisch:
vy
v y
1
tan
=
=
=
tan ⇒
v x −e v x e
Stoßzahl auch als Verhältnis der
v x
Geschwindigkeitskomponenten
e=−
vx
senkrecht zur Wand vor und nach
dem Stoß
TM3, SS 2016
R. Kral / G. Kolarov
26
Stoßzahl - experimentell
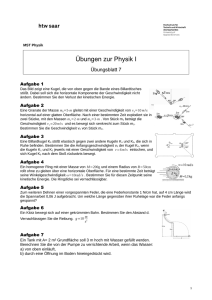
●
●
●
Masse m wird aus Höhe h1 auf waagerechte
Unterlage fallengelassen, v0 =0
Auftreffgeschwindigkeit (s.o.):
v = 2⋅g⋅h1
Nach dem Stoß erreicht die Masse
die Höhe h 2
v2
h2 =
2⋅g
⇔ v = 2⋅g⋅h2
ideal-elastisch
● h = h
1
2 ⇒ e =1
●
●
Stoßzahl
h2
v 2 g h2
e=− =
=
v 2 g h1
h1
TM3, SS 2016
R. Kral / G. Kolarov
ideal-plastisch
●
h2 = 0 ⇒ e = 0
●
27
Aufgabe - Stoß
●
●
Gegeben: Ein Eishockeypuck trifft mit der Geschwindigkeit v
°
°
unter = 45 auf eine glatte Bande und wird unter = 30
reflektiert.
Gesucht:
—
Geschwindigkeit nach dem Stoß
—
Stoßzahl e
Richtung der Stoßnormalen?
TM3, SS 2016
R. Kral / G. Kolarov
28
3.6 Momentensatz
●
Definition – Moment (aus der Statik):
M
●
0
= r×F
[ ]
kg⋅m 2
[ Nm]=
2
s
Definition – Impulsmoment (Drehimpuls, Drall):
L0 = r× p = r ×m v = m⋅r×v
[ ]
kg⋅m2
s2
∣L0∣ = r ⊥ m v
TM3, SS 2016
R. Kral / G. Kolarov
29
Momentensatz
●
2. Newtonsches Gesetz mit r vektoriell multipliziert:
r× m
●
dv
= r×F = M 0
dt
Ableitung des Dralls nach der Zeit:
d L 0
d
= r× p = ṙ
×m v r×m v̇= = r×m v̇ = r×F
dt
dt
=0
⇒ Momentensatz
(Drehimpulssatz, Drallsatz)
●
d L 0
= M 0
dt
Falls M =0 bleibt der Drehimpuls unverändert
Drehimpulserhaltung:
0
L = r×m v = const
TM3, SS 2016
R. Kral / G. Kolarov
30
Momentensatz
●
Anschauliche Deutung des Dralls:
—
In der Zeit dt überstreicht r die
Fläche dA mit dem zugeordneten
Vektor
1
1
d A= r ×d r = r×v dt
2
2
—
—
die vektorielle
Flächengeschwindigkeit:
dA 1
= r×v
dt
2
Damit ist der Drehimpuls:
dA
0
L = 2⋅m
dt
TM3, SS 2016
R. Kral / G. Kolarov
●
Wenn der Kraftvektor zum
Zentrum O zeigt: M = 0
⇒ L = const und
●
dA
= const
dt
2. Keplersches Gesetz
31
Momentensatz
●
●
m bewegt sich nur in der x-y-Ebene
Moment und Drehimpuls haben nur
z-Komponenten
0
dL 0z
dL
0
= M 0
=
M
z
dt
dt
L0 = r ⊥ m⋅v = m x⋅v y − y⋅v x
●
im Sonderfall Kreisbewegung v = r⋅
L0 = m⋅r⋅v=m⋅r 2⋅=0⋅
●
mit Massenträgheitsmoment: 0 = m⋅r 2
●
Momentensatz:
TM3, SS 2016
0 ̈ = M 0
R. Kral / G. Kolarov
32
Aufgabe Momentensatz
●
●
●
Masse m, gehalten von einem Faden, bewegt sich mit 0
auf glatter waagerechter Bahn (in der x-y-Ebene).
Am Anfang – Kreisbahn mit Radius r 0
Der Faden wird durch ein Loch in der Mitte der Kreisbahn
geführt.
●
Gegeben:
●
Gesucht:
—
—
m , r 0, 0
Winkelgeschwindigkeit ω, wenn der Faden so angezogen
wird, dass sich die Masse im Abstand r bewegt
Fadenkraft
TM3, SS 2016
R. Kral / G. Kolarov
33
Planeten-/ Satellitenbewegungen
Anwendung des Drallsatzes
Die Planeten/Satelliten können als Punktmassen betrachtet
werden. Es wirkt auf die Planeten/Satelliten nur die
Massenanziehung.
Gravitationsgesetz (Anziehungskraft zwischen zwei Massen):
m E⋅m
3
m
F G r = 2
, mit = 6,664⋅10
2
r
kg s
m E⋅m
an der Erdoberfläche F G R = m⋅g = 2
R
ME
R2
⇒ g = 2 , F G r = g⋅m 2
R
r
TM3, SS 2016
−11
R. Kral / G. Kolarov
34
Planetenbewegungen
Drall: L z = r×vm
mit
ṙ
v = r ̇
0
0
Lz = m 0
r 2 ̇
⇒
Zentralbewegung
⇒
Mz = 0,
L z =const
2
r ̇ = const = K
1 2
K
Ȧ = r ̇ =
2
2
2. Keplersches Gesetz:
Die Verbindungslinie Sonne Planet
überstreicht in gleichen Zeiten gleiche
Flächen.
TM3, SS 2016
R. Kral / G. Kolarov
35
Planetenbewegungen
Impulssatz:
m r̈ = F G e r = −
mE m
r
2
er
2
r̈−r ̇ = −
in Polarkoordinaten (r-Komponente):
mE
2
r
dr d
K
K dr
d 1
ṙ =
mit ̇ = 2 folgt ṙ = 2
= −K
d dt
d r
r
r d
*
d ṙ
d2 1
r̈ =
= −K
̇
2
dt
d r
K2 d2 1
K2
Einsetzen in * r̈−r ̇ = − 2
− 3
2
r d r
r
2
2
2
K
d 1 1 1
mit p =
folgt:
=
2
mE
p
d r r
TM3, SS 2016
R. Kral / G. Kolarov
**
36
Planetenbewegungen
Die DGL (**) hat die allgemeine Lösung:
1
1
= [ 1⋅cos− 0 ]
r
p
wählt man von einem Bahnpunkt mit
d 1
K
ṙ = − K
=
sin −0 = 0
d r
p
erhält man die Gleichung der Bahnkurve:
=> Ellipse in Polarkoordinaten
2
b
Ellipsenparameter: p =
a
r=
p
1⋅cos
e
numerische Exzentrizität: =
a
TM3, SS 2016
R. Kral / G. Kolarov
37
Planetenbewegungen
p
b2
=
=a−e
Perizentrum P: r P =
1 ae
p
b2
=
=ae
Apozentrum A: r A =
1− a−e
1. Keplersches Gesetz:
Die Planeten bewegen sich auf elliptischen Bahnen, in deren
einem Brennpunkt die Sonne steht.
TM3, SS 2016
R. Kral / G. Kolarov
38
Planetenbewegungen
Für das 3. Keplersche Gesetz nutzen wir
den Flächensatz / Drallerhaltung:
1 2
K
Ȧ = r ̇ =
= const
2
2
1
⇒ A = ⋅a⋅b= K⋅T
2
Integration über t für einen vollen Umlauf
2
mE 2
b
2
3
mit K = p m E = m E folgt: a =
2 T
a
4
3. Keplersches Gesetz:
Die Quadrate der Umlaufzeiten der Planeten verhalten sich
wie die dritten Potenzen der großen Halbachsen der Bahnen.
TM3, SS 2016
R. Kral / G. Kolarov
39
Satellitenbahnen
p
Die Bahn r = 1 cos eines Satelliten hängt von der
Startgeschwindigkeit ab. Möglich sind für
= 0 : Kreisbahnen
01: Ellipsen
=1 : Parabeln
1 : Hyperbeln
Bahngleichung in Drallsatz einsetzen
2 1
g R2
r
v = mE − =
2−
r a
r
a
2
Betrachtet man v als Geschwindigkeit im Perizentrum oder
Apozentrum, so erhält man Bahnen vom Typ I oder II.
TM3, SS 2016
R. Kral / G. Kolarov
40
Satellitenbahnen
Fall I: v im erdfernsten Punkt
e rA
e=r A−a ⇒ = = −1
a
a
2
r Av
= 1−
2
gR
Ist v sehr klein ε ≈ 1 näherungsweise Parabelbahnen
ε = 0 – Kreisbahn
v Kr = R
g
g
=R
rA
RH
0vv Kr ⇒ 01 elliptische Bahnen, die die Erde schneiden
(ohne praktische Bedeutung)
TM3, SS 2016
R. Kral / G. Kolarov
41
Satellitenbahnen
Fall II: v im erdnähsten Punkt
rp
e
e=a−r P ⇒ = = 1−
a
a
2
rP v
=
−1
2
gR
v = v Kr ⇒ = 0 selbe Kreisbahn wie Typ I
v Kr , min = g R = 7900 m/ s
v Kr v 2 v Kr ⇒ 01
Ellipsenbahnen
v = 2 v Kr ⇒ =1 Parabelbahn, Fluchtgeschwindigkeit
Sattelit verlässt das Schwerefeld der Erde.
v Flucht = 2 g R = 11 200 m/ s
TM3, SS 2016
R. Kral / G. Kolarov
42
Ein paar astronomische Dimensionen
●
Sonne:
30
− Masse:
1,989⋅10 kg
6
− Durchmesser: 1,392⋅10 km
●
●
Erde:
− Masse:
5,974⋅10 24 kg
− Durchmesser: 12 756,32 kmÄquartor
12 713,55 kmPol
Mond:
− Masse:
7,349⋅1022 kg
− Durchmesser:
3476 km
− Bahn :
r A = 384 400 km , r P = 363 300 km
TM3, SS 2016
R. Kral / G. Kolarov
43
3.7. Arbeitssatz
●
●
2. Newtonsches Gesetz mit dr skalar multipliziert:
dv
m ⋅d r = F⋅d r
dt
mit d r = v dt und Integration zwischen r 0 v 0 und r 1 v 1 :
v1
r1
∫ m v d v = ∫ F⋅d r
v0
●
r0
r1
⇒
m⋅v 21 m⋅v 20
−
= ∫ F⋅d r
2
2
r
0
rechte Seite der Gl. - Arbeit W der Kraft F
r1
W = ∫ F⋅d r
r0
2
●
Kinetische Energie:
TM3, SS 2016
m⋅v 2 m⋅∣v∣
Ek =
=
2
2
R. Kral / G. Kolarov
44
3.7. Arbeitssatz
Arbeitssatz:
●
●
E k1−E k0 = W
Arbeit zwischen zwei Bahnpunkten = Änderung der kinetischen
Energie.
e
Auf die Masse m wirken i.a. eingeprägte Kräfte F und
z
Zwangskräfte F
F = F eF z
●
●
Zwangskräfte wirken senkrecht zur Bahn und leisten daher
keine Arbeit: W F z = 0
Es ist also nur die Arbeit der Eingeprägten Kräfte zu
berücksichtigen:
W = ∫ F e dr
TM3, SS 2016
R. Kral / G. Kolarov
45
Beispiel Arbeitssatz
●
Eine Masse m bewegt sich auf einer rauen
schiefen Ebene (Winkel α) von Lage 0 in
Lage 1.
●
Gegeben:
●
Gesucht:
h , , , v 0= 0
―
Freikörperbild
―
Arbeit der Kräfte
―
Bedingung für mögliche Bewegung
―
Geschwindigkeit aus Arbeitssatz
TM3, SS 2016
R. Kral / G. Kolarov
46
Leistung
●
●
Leistung – pro Zeiteinheit verrichtete Arbeit:
dW
F⋅d r
P=
=
= F⋅v
dt
dt
Dimension der Leistung:
Nm
1 Watt =1 W = 1
s
●
Achtung: Nicht verwechseln W (Watt) mit W (Arbeit)
●
Zusammenhang mit PS:
1 PS = 0,735 kW, 1kW = 1,36 PS
●
Die Leistung der Zwangskräfte verschwindet, da diese
senkrecht zur Bahn wirken:
F z ⊥ d r
TM3, SS 2016
R. Kral / G. Kolarov
47
Wirkungsgrad
●
●
●
●
Bei allen Maschinen treten Energieverluste auf
(Reibung in Lagern, Verzahnungen, etc.).
Wirkungsgrad: Verhältnis der Nutzarbeit WN zur
aufgewandten Arbeit WA
bezogen auf die Zeit - augenblicklicher
Wirkungsgrad aus den Leistungen
WN
=
WA
PN
=
PA
Aufgrund der auftretenden Verluste gilt ≤ 1
TM3, SS 2016
R. Kral / G. Kolarov
48
Beispiel Wirkungsgrad
●
Gegeben:
—
—
—
●
PKW, Motorleistung P A = 30 kW
km
Geschwindigkeit v = 60
h
Wirkungsgrad = 0,8 (ab Getriebeeingang)
Gesucht: Antriebskraft F
Anmerkung: Motorwirkungsgrad bei PKW i.a. 0,3
TM3, SS 2016
R. Kral / G. Kolarov
49
Konservative Kräfte
●
●
konservative Kräfte – besitzen ein Potential
Die Arbeit konservativer Kräfte zwischen zwei
Lagen 0 und 1 ist unabhängig vom Weg.
F = F x⋅e x F y⋅e y F z⋅e z
1
d r = dx⋅e x dy⋅e y dz⋅e z
1
W = ∫ F⋅d r = ∫ F x⋅dxF y⋅dy F z⋅dz
0
●
●
●
0
Wenn der Integrant ein vollständiges Differential
ist, dann ist das Integral wegunabhängig:
−dE p = F x dx F y dy F z dz
E p x , y , z− Potential von F , potentielle Energie
(-): Zweckmäßigkeit, in TM 1, 2: E p =
TM3, SS 2016
R. Kral / G. Kolarov
50
Konservative Kräfte
●
●
●
●
●
totales Differential:
für d.h. für F :
∂ EP
∂ EP
∂ EP
dE p =
dx
dy
dz
∂x
∂y
∂z
∂ EP
∂ EP
∂EP
Fx =−
, Fy =−
, Fz =−
∂x
∂y
∂z
∂ EP
∂ EP
∂ EP
e x
e y
ez
mit dem Gradienten: grad E p =
∂x
∂y
∂z
F =−grad E p
∂Fx
∂2 E P ∂ F y
∂2 E P
=−
,
=−
partielle Ableitungen von F:
∂y
∂ x∂ y
∂x
∂x∂ y
∂ Fx ∂ Fy
⇒
=
Bedingung für
∂y
∂x
Potentialkräfte
∂ F y ∂ Fz ∂ Fz ∂ Fx
analog:
=
,
=
∂z
∂y
∂x
∂z
TM3, SS 2016
R. Kral / G. Kolarov
51
Konservative Kräfte
●
Rotation einer Kraft F :
∣
ex
rot F = ∂
∂x
Fx
ey
∂
∂y
Fy
∣
ez
∂ = ∂ Fz−∂ F y e ∂ F x−∂ Fz e ∂ F y−∂ Fx e
x
y
∂y
∂z
∂z
∂x
∂x
∂y z
∂z
Fz
●
Bedingung für Potentialkräfte in Vektorform:
●
Ein Vektorfeld A mit
TM3, SS 2016
rot A=0
R. Kral / G. Kolarov
rot F =0
heißt wirbelfrei.
52
Energiesatz
●
Für Potentialkräfte:
1
●
Arbeit:
●
1
W = ∫ dW = −∫ dE p = − E p1− E p0
0
●
dW = −dE p
0
Die potentielle Energie hängt vom Bezugssystem ab, die
Differenz (Ep1 – Ep0) jedoch nicht!
Einsetzen in Arbeitssatz – Energiesatz:
E k1 E p1 = E k0 E p0 = const
●
Der Energiesatz gilt nur, wenn alle eingeprägten Kräfte ein
Potential besitzen!
TM3, SS 2016
R. Kral / G. Kolarov
53
Potentialkräfte
●
Potential einer Gewichtskraft: E p = G⋅z
―
●
Potential einer Federkraft
(Federkonstante c):
―
●
x2
Ep = c
2
Nullniveau – Feder entspannt
Potential einer Drehfeder
(Federkonstante cT):
―
●
Nullniveau bei z = 0
2
E p = cT
2
Nullniveau bei = 0
Nullniveau für Potentialkräfte!
TM3, SS 2016
R. Kral / G. Kolarov
54
KEINE Potentialkräfte
●
Reibungskräfte und Widerstandskräfte haben kein
Potential!
―
nicht-konservative Kräfte
―
mechanische Energie wird in Wärme umgewandelt
―
dissipative Kräfte
●
Energiesatz gilt nicht!
●
Arbeitssatz anwenden!
●
Anwendung des Arbeits- oder Energiesatzes ist besonders
effektiv, wenn v(x) oder x(v) gesucht ist.
TM3, SS 2016
R. Kral / G. Kolarov
55
Aufgabe Energiesatz
●
Eine Masse m wird in der Höhe h über einer ungespannten
Feder vertikal mit der Anfangsgeschwindigkeit v0 abgeworfen.
●
Gegeben: m , h , g , c , v 0
●
Gesucht: Max. Stauchung der Feder x max = ?
TM3, SS 2016
R. Kral / G. Kolarov
56
Aufgabe Arbeitssatz
●
Eine Masse m rutscht aus der Ruhelage in A eine raue schiefe
Ebene (Winkel α, Reibkoeffizient μ) herab und tangential in eine
glatte Kreisbahn (Radius r).
●
Gegeben: m , , , r , g
●
Gesucht: h = ?
Anfangshöhe h über dem Scheitel B, damit die Masse die Bahn
in B nicht verlässt.
TM3, SS 2016
R. Kral / G. Kolarov
57
Erweiterter Energiesatz / Arbeitssatz
●
●
●
●
Aus dem Arbeitssatz:
E k −E k0 = W
Arbeit der konservativen und
W = W konsW nichtkons
nicht-konservativen Kräfte und Momente:
Für konservative Kräfte/Momente gilt:
W kons = − E p −E p0
Erweiterter Energiesatz (Arbeitssatz):
E k E p = E k0 E p0 W nichtkons
Summe aus kinetischer und potentieller Energie „danach“ =
Summe der kinetischer und potentieller Energie „davor“
+ zugeführte Energie (Antrieb aus nicht-konservativen Kräften)
- abgeführte Energie während der Bewegung zwischen den beiden
Zuständen (Widerstand, z.B. Reibung)
TM3, SS 2016
R. Kral / G. Kolarov
58
Vorgehen nach dem 2. Newtonschen Gesetz
●
Grundgesetz:
●
Masse * Beschleunigung in α-Richtung
m⋅a = F
= Summe aller Kräfte in α-Richtung
●
in Komponenten, z.B. kartesisches Koordinatensystem:
m ẍ = ∑ F x , i
i
●
m ÿ = ∑ F y , i
i
m z̈ = ∑ F z , i
= { x , y , z }
i
oder in zylindrischen Koordinaten:
m a r = ∑ F r ,i
i
a r = r̈−r ̇
TM3, SS 2016
2
m a = ∑ F , i
i
m z̈ = ∑ F z , i
= {r , , z }
i
a = r ̈2 ṙ ̇
R. Kral / G. Kolarov
59
Bewegungsgleichungen – Vorgehen nach
Newton
1. Anzahl der Freiheitsgrade f ?
2. n geeignete Koordinaten wählen, positive allgemeine Lage
3. Positive Koordinatenrichtung = pos. Beschleunigungsrichtung
4. Freischnitt in allgemeiner Lage, Kräfte und Momente eintragen
5. Skalare Auswertung der Kräfte-/Momentensummen
6. (n-f) kinematische Beziehungen zwischen den Koordinaten
7. Zwangskräfte eliminieren
=> Bewegungsgleichungen
TM3, SS 2016
R. Kral / G. Kolarov
60
3.8 Prinzip von d'Alambert
●
Einführung einer fiktiven Kraft, der d'Alambertschen
F T = −m a
Trägheitskraft:
●
Scheinkraft – keine Gegenkraft (nach actio = reactio)
●
Damit nimmt das Grundgesetz die Form an:
●
Gleichgewicht in α-Richtung:
F F T = 0
Summe aller Kräfte + Trägheitskraft = 0
●
In Komponenten, z.B. in x-Richtung:
F T , x = −m ẍ
TM3, SS 2016
∑ F x , i F T , x
i
=0
R. Kral / G. Kolarov
61
Beispiel Bewegungsgleichung –
geradlinige Bewegung
●
Gegeben: v0, k
●
Schiff mit Geschwindigkeit v0 schaltet den Motor ab
●
Widerstandskraft bei Gleiten im Wasser:
●
Gesucht: Bewegungsgleichung (nur horizontal)
Lösung: Newton
∑ F x ,i
i
D'Alambert
= m⋅ẍ = − F w
⇒ m⋅ẍk⋅ ẋ = 0
TM3, SS 2016
F w =k⋅ v
F T = −m⋅a
∑ F x , i = −F w− F T = − F w −m⋅ẍ = 0
i
⇒ m⋅ẍk⋅ ẋ = 0
R. Kral / G.
Kolarov
=> nichtlineare
DGL
2. Ordnung
62
Bewegungsgleichungen – Vorgehen nach
d'Alambert
1. Anzahl der Freiheitsgrade f ?
2. n geeignete Koordinaten wählen, positive allgemeine Lage
3. Beschleunigung in gewählten Koordinaten
4. Freischnitt in allgemeiner Lage, Kräfte und Momente eintragen
5. Entgegen der positiven Beschleunigungsrichtungen alle
d'Alambertschen Kräfte (Scheinkräfte) eintragen
6. Skalare Auswertung der Kräfte-/Momentengleichgewichts
7. (n-f) kinematische Beziehungen zwischen den Koordinaten
8. Zwangskräfte eliminieren
=> Bewegungsgleichungen
TM3, SS 2016
R. Kral / G. Kolarov
63
3.9 Lagrangesche Gleichungen 2. Art
●
●
●
●
●
Die Lagrangeschen Gleichungen 2. Art verwenden für jeden
Freiheitsgrad eine verallgemeinerte Koordinate
Der Ansatz ähnelt der virtuellen Arbeit. Betrachtet wird die
Arbeit der Kräfte
Zwangskräfte leisten keine Arbeit, daher treten Zwangskräfte in
den Lagrangeschen Gleichungen 2. Art nicht auf.
Es ist zwischen Potentialkräften und Kräften/Momenten ohne
Potential zu unterscheiden.
Lagrangesche Funktion:
TM3, SS 2016
L = E k −E p
R. Kral / G. Kolarov
64
Vorgehen Lagrangesche
Gleichungen 2. Art
1. n Koordinaten festlegen
2. Anzahl der Freiheitsgrade f
3. ( n-f ) kinematische Beziehungen zwischen den Koordinaten
4. Ergebnis – f verallgemeinerte Koordinaten:
q j kann x oder sein.
q j , j = 1 f
5. Kinetische Energie in allgemeiner Lage E k
6. Potentielle Energie in allgemeiner Lage E p
(Nullniveau der Gewichtskräfte kann beliebig gewählt werden)
7. Lagrangesche Funktion:
TM3, SS 2016
L = E k −E p
R. Kral / G. Kolarov
65
Vorgehen Lagrangesche
Gleichungen 2. Art
8. Lagrangesche Gleichungen 2. Art – Bewegungsgleichungen
ohne Zwangskräfte:
d ∂L
∂L
−
= Q j , j = 1, , f
dt ∂ q̇ j ∂ q j
9. Q j − nur verallgemeinerte Kräfte/Momente ohne Potential:
●
Die Verschiebung des Angriffspunktes der Kraft muss durch
qj ausgedrückt werden.
●
Vorzeichen je nach Richtungen von Q j und q j
●
aus der Arbeit Q j über q j (Skalarprodukt)
dW = Q j⋅d q j
Wirken nur Potentialkräfte, so ist Q j = 0
TM3, SS 2016
R. Kral / G. Kolarov
66
Zusammenfassung
●
2. Newtonsches Gesetz:
F = m⋅a
t
●
Impulssatz:
m⋅v = m⋅v F = m⋅v∫ F t d t
t0
●
Drallsatz:
L0 = r× p = r×m v
●
Energiesatz:
E k E p = const
●
Arbeitssatz:
E k1 E k0 = W
●
Alternativen zur Newtonschen Mechanik
TM3, SS 2016
R. Kral / G. Kolarov
L̇0 = M 0
67