1 Messung schwacher niederfrequenter Magnetfelder
Werbung

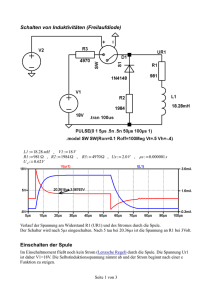
Messung schwacher niederfrequenter Magnetfelder J. A. Rojas-Coto, T. Stadtler, J. L. ter Haseborg, Technische Universität Hamburg-Harburg Arbeitsbereich Messtechnik / EMV Tel.: (040) 42878 2734 Fax: (040) 42878 2832 e-mail: [email protected] Zusammenfassung In vielen Anwendungen muss die Feldstärke schwacher magnetischer Wechselfelder niedriger Frequenzen gemessen werden. In dieser Arbeit wird untersucht, wie das Magnetfeld eines stromdurchflossenen Leiters beliebiger rechteckiger Querschnittsfläche bestimmt werden kann. Hierfür werden zunächst verschiedene Sensoren untersucht, ihre Bauformen und Hauptmerkmale werden vorgestellt. Es wird gezeigt, daß kurze rechteckige Spulen gut für den Anwendungszweck geeignet sind. Die Anfertigung und Kalibrierung dieser Sensoren wird dargestellt. Ein numerisches Verfahren zur Berechnung der genauen ortsabhängigen Feldstärke wird erläutert. Darüber hinaus werden Messergebnisse präsentiert. Einleitung Für die Messung von schwachen niederfrequenten Magnetfeldern, werden mehrere Typen von Sensoren verwendet. Zu ihnen zählen Spulen, Hall-Sensoren, magnetoresistive Sensoren und Fluxgate-Sensoren. Speziell für ultraschwache Felder werden auch supraleitende SQUID-Sensoren verwendet [4]. Schwache Magnetfelder sind hier solche Felder, deren Feldstärke in der Größenordnung des Erdmagnetfeldes liegen. In Berlin ist ihr Betrag ca. 39 A/m (49 µT) [4]. Als Vergleich ist die Feldstärke eines runden fadenförmigen Leiters, der von einem Strom Î= 1 A durchflossen wird, bei einem Abstand von ca. 4 mm ebenfalls 39 A/m. Die meistens H-Feld-Sensoren sind aus physikalischen und konstruktiven Gründen nicht in der Lage solche schwachen Magnetfelder direkt zu messen [4]. Andere Sensoren sind mit einer größeren elektronischen Peripherie verbunden oder müssen thermisch kompensiert werden oder sind sehr kostspielig. Bei einigen tritt zusätzlich eine Temperaturdrift ein, die nicht linear ist und damit eine größere Herausforderung an die Kalibrierung darstellt. Luftspulen dagegen haben ihren größten Vorteil in ihrer einfachen Herstellung und ihrem Preis. Ihr größter Nachteil liegt im Frequenzverhalten, denn im höheren Frequenzbereich dominieren die Wicklungskapazitäten. Sie bilden mit ihrer inhärenten Induktivität, einen Resonanzkreis, und bei Anwendungen in der Nähe dieses Bereiches verlieren sie ihr lineares Verhalten und ihre Kalibrierung. Für Anwendungen im linearen Bereich, können sie jedoch für Frequenzen zwischen 10-1 und 104 Hz fast problemlos angewandt werden. Für höhere Frequenzen bis in den GHz-Bereich müssen andere Spulen mit niedrigeren Windungszahlen angefertigt werden; im Extremfall mit nur einer Windung. Für spezifische Messfrequenzen besteht die Möglichkeit, sie bei der Resonanzfrequenz zu kalibrieren und zu betreiben, um dabei höchste Empfindlichkeit zu erreichen. Konstruktive Merkmale von Spulen Spulenform In dieser Arbeit sind aus technisch spezifischen Gründen hauptsächlich runde und rechteckige Spulen untersucht worden. Wegen der höheren Empfindlichkeit, der einfacheren Berechnung und der praktischen Kalibrierung sind rechteckige Spulen vorzuziehen. Bei diesen Sensoren bestimmen maßgebend Merkmale wie die Windungszahl N, die Durchtrittsfläche A und die Länge l der Spulen ihre Empfindlichkeit. Da die Messung von flachen Magnetfeldern möglichst nah an leitenden Strukturen durchgeführt werden soll, sind rechteckige Spulen besser geeignet, um bei kürzeren Entfernungen höhere induzierte Spannungen zu erzeugen. Runde Spulen haben den Nachteil, dass ihre Fläche im Bereich höchster Feldstärke klein ist. Der Wunsch auf höhere induzierte Spannungen zu kommen, würde dazu führen, den Durchmesser des 1 Sensors oder die Länge der Spule zu vergrößern. Mit zunehmender Größe lassen sich Magnetfelder, die sich rasch ändern, nicht genau genug bestimmen und das Anwendungsgebiet verringert sich. Damit wird die Diskretisierung der Spule zwingend. Bild 1:Sensoren: a) abgeschirmt b) nicht abgeschirmt Besondere Beachtung soll der Spulendicke bzw. bei runden Spulen ihre Länge geschenkt werden, da der Sensor immer den arithmetischen Mittelwert des über die Dicke der Spule herrschenden Magnetfeldes ermittelt. Für die Kalibrierung der Spule wurde hier eine Formel abgeleitet, die für sehr dünne Spulen gültig ist. Bei dickeren Spulen es ist zwingend, die Spule in mehrere Teile zu gliedern und für jeden Teil eine getrennte Berechnung durchzuführen. So eine Diskretisierung muss u.U. auch Lageweise vorgenommen werden. Abschirmung Eine Abschirmung der Spule ist trotz der niedrigen Frequenzen notwendig, da bei Messungen, die sehr nah am Leiter erfolgen, die E-Feld-Einkloppung nicht vernachlässigt werden kann. Dieser Einkopplung wirkt der am Sensor induzierten Spannung entgegen. Wie aus der Tabelle 1 zu entnehmen ist, ist der Messfehler bei der nicht abgeschirmten Spule bei der angegebenen Frequenz sehr groß. Kalibrierung Zur Kalibrierung können zwei verschieden Verfahren angewandt werden: Das parallele Feld einer von I1 durchflossenen Zylinderspule mit Radius R, Länge l und mit N1-Windungen (Bild 2a) oder das radiale Feld eines dünnen zylindrischen Leiters (Bild 2b). Beide Felder bieten den Vorteil, sich analytisch gut berechnen zu lassen. Die Feldstärke einer langen Zylinderspule kann in ihrer Mitte ziemlich genau durch (1) bestimmt werden. Gleichung (2) gibt den Scheitelwert der bei diesem Verfahren am Sensor induzierten Spannung an. ) r N1 ⋅ I1 µ ⋅b r N1 ⋅ I1 (1) (2) H= Ûi = ω ⋅ N 2 ⋅ A ⋅ Û i = N 2 ⋅ ω ⋅ Î ⋅ 0 ⋅ ln a (3) ri 2π 4 ⋅ R2 + l 2 4 ⋅ R2 + l 2 Zum ergänzenden Vergleich bietet es sich an, mit dem Sensor das Feld eines geradlinigen, runden Leiters zu kalibrieren, das sich ebenfalls analytisch bestimmen lässt. Die induzierte Spannung wird mittels (3) berechnet. Kalibrierungsverfahren bei: Induzierte Spannung bei: nicht abgeschirmtem Sensor abgeschirmtem Sensor rundem Leiter Rechnung Messung 2,69 V 1,34 V 2,69 V 2,78 V Fehler 51% 3,3% zylindrischer Spule Rechnung Messung 18,3 V 8,0 V 18,3 V 18,2 V Fehler 56 % <1% Tabelle 1: Vergleich der Kalibrierungsverfahren. Frequenzverhalten des Sensors Das Frequenzverhalten dieser Sensoren wird hauptsächlich durch die eigene Windungskapazität und die inhärente Induktivität der Spule bestimmt. Durch die Abschirmung bedingt erhält man bei der abgeschirmten Spule eine größere Kapazität und damit eine niedrigere Resonanzfrequenz (70 kHz) als bei der nicht abgeschirmten Spule (120 kHz). Für die Anwendung soll beachtet werden, dass der Sensor sich in dem so genannten differenzierenden- oder geradlinigen Bereich befinden soll 2 a) b) Bild 2: Kalibrierung des Sensors a) mittels einer Zylinderspule und b) mit einem runden Leiter Berechnung der induzierten Spannung an einem rechteckigen Leiter Um eine Vergleichsmöglichkeit zu haben, wird zuerst die Stromverteilung eines flachen, rechteckigen, stromdurchflossenen Leiters berechnet. Dafür ist ein Programm entwickelt worden, das auf der Teilleitermethode beruht und die Berechnung der Stromverteilung im Innern des Leiters durchführt. Dabei wird der rechteckige Leiter in mehrere hundert Teilleiter gegliedert und ihre Eigen- und Gegeninduktivitäten berechnet. Hierzu macht man Gebrauch von dem von Maxwell eingeführten Konzept der mittleren geometrischen Abstände[1, 2, 3, 5]. Auf diese Weise kann die Stromverteilung in allen Teilleitern bestimmt werden. Mit dieser Stromverteilung wird die am Sensor induzierte Spannung berechnet, die als Vergleichsgröße für die hier gemessene induzierte Spannung dienen soll. Die magnetische Feldstärke wird aus der Messung bestimmt und ihre Ergebnisse werden mit der zuvor ermittelten numerischen Rechnung verglichen (Bild 3a und 3b). Die Berechnung der am Sensor induzierten Spannung wird mittels (4) durchgeführt. Û iges 2 2 n xk + y2 µ0 ⋅ b =N⋅ ⋅ ω ⋅ ∑ Î k ⋅ ln 2 2 4π x k + y1 k =1 (4) Sensor y r a) Y2 r b) y1 x Bild 3: a) Zur Berechnung der induzierten Spannung eines rechteckigen Leiters b) Stromverteilung Messverfahren und Vergleich Hier wird in ein 2 mm starkes und 300 mm breites Aluminiumblech als Hinleiter, der das Messobjekt darstellt, ein sinusförmiger Strom mittels einer einstellbaren Stromquelle eingespeist. Da der Einfluss des Rückstromes bei den üblichen Laborabmessungen, nicht zu vernachlässigen ist, soll der Rückleiter in zwei symmetrische Leiter aufgeteilt und ihre Lage so bestimmt werden, dass ihr Einfluss sich aufhebt (Bild 4). Mit dem induktiven Sensor wird die induzierte Spannung über der gewünschten Stelle an der Oberfläche des Leiters gemessen. Die dargestellten Messungen sind hier an der Mitte des flachen Leiters orthogonal zur Stromrichtung durchgeführt. 3 Holzrahmen Rückleiter H-Sensor Hinleiter x x x x x I-Sensor Bild 4.: Messaufbau für die Messung der induzierten Spannung oberhalb eines rechteckigen Leiters Ergebnisse Der Vergleich zwischen gemessenen und berechneten Größen ergibt eine gute Übereinstimmung. Die Unterschiede lassen sich auf die Sensoreigenschaften, möglicherweise auf die nicht diskretisierte Spule zurückführen. Außerdem ist der Einfluss des Resonanzeffekts bei der Messfrequenz nicht zu vernachlässigen. Trotzdem sind die Unterschiede kleiner als 8%. Bild 5: Induzierte Spannung oberhalb eines rechteckigen Leiters Bild 6.: Berechnete Feldstärke an der Mitte des rechteckigen Leiters Zusammenfassung Die Ergebnisse zeigen, dass Luftspulen sich sehr gut als induktive Sensoren eignen, um niederfrequente Magnetfelder zu messen. Die hier erwähnten konstruktiven Details sollen beachtet werden. Die Berechnung der magnetischen Feldstärke über die Fläche eines Leiters lässt sich problemlos auf diese Weise ermitteln. Literatur [1] J.C. Maxwell, „A Treatise on Electricity & Magnetism“ Volume 2, Dover, New York, 1954. [2] F. Ollendorf. „Berechnung magnetischer Felder“, Springer,Wien, 1952 [3] D. Oeding, K. Feser „Mittlere geometrische Abstände von rechteckigen Leitern“ ETZ-A Band 86 1965. [4] W. Göpel,J. Hesse, J.N. Zemel. Sensors VCH Verlag, Weinheim 1989. [5] Wang, Y.J. „A Precise Method for the Impedance Calculation of a Power Rail Taking into Account the Skin Effect and Complex Geometry“. ETEP Vol.10, No1, 2000. 4