Kap2.4
Werbung

12
2. Die Newtonsche Mechanik
daher nie universellen Charakter haben wie die Kräfte,
die von Körpern auf andere Körper ausgeübt werden.
Letztere sind aufzählbar, sie sind je nach physikalischem Problem in einem Inertialsystem wirksam und
in die Bewegungsgleichung aufzunehmen. Scheinkräfte sind je nach der Abweichung von einem InertialSystemvon komplizierter Art. Eine Formulierung der
Newtonschen Gesetze in einem beliebigen Nichtinertialsystem würde voraussetzen, daß man diese Scheinkräfte klassifizieren könnte und sie nach der Nichtinertialität des Bezugssystems einsetzte. Das impliziert
aber, daß man ein Inertialsystem kennt und somit ist
man wieder auf das Newtonsche Konzept zurückgeführt, nämlich in einem Inertialsystem die Bewegungsgleichung zu formulieren und nur Kräfte zuzulassen,
die von Körpern auf andere Körper wirken.
Dieses Gesetz hat die gleiche Struktur wie das Gravitationsgesetz. Betrachtet man zwei Protonen, so ziehen
sich diese an auf Grund der Gravitationskraft, und sie
stoßen sich ab auf Grund der Coulomb-Kraft. Die
Coulomb-Kraft ist dabei w 1O36mal stärker als die
Gravitationskraft.
Daß sich elektrische Kräfte in der Alltagswelt so
wenig bemerkbar machen, liegt daran, daß es sowohl
positive als auch negative Ladungen gibt. Gerade
wegen der Stärke der elektromagnetischen Kräfte
werden sich positive und negative Ladungen nach
Möglichkeit kompensieren. Massen sind andererseits
immer positiv, und Gravitationskräfte können nicht
wie elektrische Kräfte abgeschirmt werden. Dies ist der
Grund dafür, daß sie trotz ihrer relativen Schwäche
leichter zu beobachten sind.
iv) Auch geschwindigkeitsabhängige Kraftgesetze
spielen in der Physik eine Rolle. Ein fundamentales
Gesetz ist das folgende, das in Situationen gilt, in denen
Teilchen eine elektrische Ladung e tragen. Befindet
sich solch ein Teilchen in einem elektrischen Feld
E(v, t) und einem magnetischen Induktionsfeld B(r, t),
so wirkt auf das Teilchen die Kraft
vi) Zum Schluß sei noch ein weiteres geschwindigkeitsabhängiges Kraftgesetz angegeben. Auch durch
Reibung kann eine Bewegung beeinflußt werden. Man
stellt experimentell fest, daß diese Reibungskraft für
kleine Geschwindigkeiten proportional der Geschwindigkeit und der Bewegungsrichtung entgegengesetzt
ist :
K&Y,t)=e[E(r,t)+YxB(r,t)]
l
(2.3.13)
& nennt man auch die Lorentz-Kraft. Diese Kraft
hängt also auch noch von der Geschwindigkeit des
Massenpunktes ab, sie kann sogar zusätzlich explizit
von der Zeit abhängen, wenn E und B dieses tun. Die
Lorentz-Kraft ist also die Kraft auf ein Teilchen mit
einer elektrischen Ladung -e in einem elektromagnetischen Feld. Die Felder E und B sollen hier von anderen
geladenen Teilchen verursacht werden.
v) Die Kraft, die zwei ruhende Ladungen ql, q2, die
sich am Orte Pl bzw. P2 befinden, aufeinander ausüben, wird beschrieben durch das Coulomb-Gesetz’l
K 12=---
1
w72
47rEO r3
Y mit
-lci
$
#>O
.
(2.3.15)
Für den freien Fall mit Berücksichtigung der Reibung
wäre so
mY=mg-Ici
(2.3.16)
die Bewegungsgleichung, die es zu lösen gilt.
2.4 Der Energiesatz für einen Massenpunkt
in einem Kraftfeld
2.4.1 Wegintegrale
r=PT2,,
(2.3.14)
47r&()= IJ126 x 10s10 CV1 m-l
KR =
.
l1 Coulomb, Charles Auguste de (* 1736 Angouleme, t 1806 Paris).
In den Jahren 17844789 entscheidende Abhandlungen über
Elektrizitätslehre und Magnetismus. Die von ihm erfundene
Drehwaage ermöglichte ihm die Entdeckung des Kraftgesetzes
zwischen ruhenden Ladungen.
Wir wollen einen Massenpunkt der Masse m betrachten, der unter dem Einfluß eines zeitunabhängigen
Kraftfeldes steht. Es sei also
K(t) = F (r(t)) .
Dann lautet die Bewegungsgleichung
mv(t) = F (r(t)) .
(2.4.1)
13
2.4 Der Energiesatz für einen Massenpunkt in einem Kraftfeld
Multipliziert man nun diese Gleichung skalar mit +:
(2.4.2)
mW=K(r)*Y
und integriert man beide Seiten über t von l1 nach tz , so
erhält man für die linke Seite
22
m s dtP+=?m
1
t1
t2
1
d
1 dt dt (p)=2m+2
t2
t1
t1
1
2
Ehe wir auf die physikalische Bedeutung dieses Wegintegrals Al2 (C) eingehen, müssen wir uns über einige
Eigenschaften von allgemeinen Wegintegralen über
Vektorfelder informieren.
i) Allgemein nennt man ein Vektorfeld
=T(t2)
- T(t,)mit
T =-mf2
a) Anfangs- und Endpunkt des Weges,
b) den Weg selbst zwischen den Punkten,
c) den Integranden, d.h. ein Vektorfeld.
.
(2.4.3)
.Tc
F(r,
t)
l
dr = j F(r(a’),
,
Für die rechte Seite erhält man das Integral
; F@(t))-%
(2.4.4)
dt .
Dabei ist r(t) in K@(t)) eine Lösung der Bewegungsgleichung. Sei r (tl) = rl, r(t2) = y2 und sei C das Stück
der Bahn zwischen y1 und r2, so schreiben wir auch
s P@(t))-y
dt=
7 P(r)&
.
(2.4.5)
ri,C
t1
Der Ausdruck
qJ2; C,O=42(C)
W2)
dz
dt .
l
da’
(2.4.8)
ii) Ein Vektorfeld F(r, t) ist konservativ genau
dann, wenn das Wegintegral über einen jeden geschlossenen Weg verschwindet.
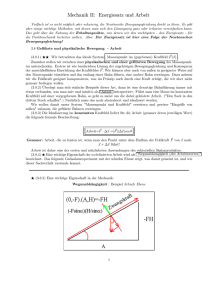
Das ist offensichtlich, denn seien C1 und C2 zwei
Wege von y1 nach r2 (Abb. 2.4.1). Ist F konservativ, so
ist
Il
r2
s
,Cl
F*dr=
Fl
1 F*dr=Pl $2
s
F-du,
(2.4.9)
r29-c2
also ist
s
ClU-c2
Fedr=O.
(2.4.10)
Ist umgekehrt jedes Wegintegral über einen geschlossenen Weg gleich Null, so betrachte man alle geschlossenen Wege, auf denen r1 und r2 liegen. Diese beiden
Punkte teilen den Weg in zwei Teile, und die obige
Rechnung ergibt, in umgekehrter Reihenfolge gelesen,
die Aussage, daß das Integral unabhängig vom Weg
ist.
Cl
=s F@(t))-@$
t) F
unabhängig vom Weg C= (v(a’) (0 5 0’ 5 o> zwischen
y1 und r2 ist, also nur noch von v(O) = y1 und v(a> = r2
abhängt. Man beachte, daß t hier die Rolle eines (oder
mehrerer) Parameter spielt und bei der Integration
entlang des Weges festgehalten wird.
(2.4.6)
stellt, mathematisch betrachtet, ein Wegintegral dar.
Wir stellen ausdrücklich fest, daß das Wegintegral nur
von dem Stück der Bahn zwischen y1 und r, abhängen
kann und von der Durchlaufrichtung dieses Bahnstücks, nicht aber von der Bahnkurue r(t) zwischen tl
und t2. Ersetzt man nämlich die Zeit t durch einen
anderen Parameter z mit t = t(z), so ist
J F(*(f(T)))-drdr(t))
701)
t)
0
r2
7 F(r)odr=A12(
F(v,
konservativ, wenn das Wegintegral
- t2
(2.4.7)
t1
Zur Charakterisierung eines Wegintegrals muß man
also angeben :
Ac3
5
c2
Abb. 2.4.1. Zwei Wege von r1 nach r2
2. Die Newtonsche Mechanik
14
iii) Ein Vektorfeld F ist konservativ genau dann,
wenn es ein skalares Feld U(v, t> gibt mit
F = -VU(r,
(2.4.11)
t) = -grad U(v, t) .
ist also
U(r)=
U@(a))=
-j
F@(d))
l
Der Gradient ist hierbei ein Vektorfeld, definiert durch
und so
(2.4.12)
VU(r,t)=
$
wenn q, x2, x3 die Koordinaten bezüglich einer
Orthonormalbasis sind. (Das Minuszeichen ist Konvention.) U ist dadurch bis auf eine Konstante bestimmt.
Beweis
a) ES gebe ein U(v, t). Wir wollen zeigen, daß
U(r(o))
unabhängig vom Wege ist. Sei C irgendein Weg mit
C=(Y(b’)~oIdI~},r(O)=r~,r(cr)=r,
=fy
7 F* d Y= -i VU(r(o’), t)- 9
0
WC
=
-
d
0’ dO’ U(r(O,
[U(yz)
- WJI
l
2
.
(F+VU)-
T=o
.
Da aber dr(a)/dc beliebig ist wegen der Beliebigkeit des
Weges C, so ist
vu .
Wählt man statt rl einen anderen Punkt V; als
Anfangswert bei dem Wegintegral, so ist
u= j Pdr=i
ri
Sd
0
-F@(O))
vu=
)
dann ist
cr
l
oder
F ---
---
da’ , (2.4.15)
F
0
r1
Fedr+S
Fdr=u+c
.
Fl’
Andererseits ist
du’
VU=V(U+c)=VU.
0
(2.4.13)
l
Offensichtlich ist das Ergebnis nicht vom Weg C
abhängig.
b) Ist umgekehrt
U ist durch F so nur bis auf eine Konstante bestimmt.
Man nennt U ein zu F gehörendes Po ten tialfeld oder
auch Potential.
iv) Ist F konservativ, so gilt:
(2.4.16)
VxF=O,
V x F (sprich Rotation F) ist hierbei ein Vektorfeld, das
wie folgt definiert ist:
unabhängig vom Wege, so definiere man
u( Y) :=-
j
aF,
---
7aX3 axl 9ax, dX2
(2.4.14)
F=dr
aF3 i3F2 dF
---2
(2.4.17)
oder auch
o,c
mit C beliebig und y1 beliebig, aber fest. Mit
C=(v(a’)(OIo’Io},v(O)=v,,v(a)=v
)
(V X F)i =
Eijk
2
j
(2.4.18)
2.4 Der Energiesatz für einen Massenpunkt in einem Kraftfeld
in einem rechtshändigen Orthonormalsystem. Wenn
F = -VU, so ist
au
und
axk
ah aFj -- a2u
---=
Fk=
dxj
--
axk
dxkdxj
aw
+ -=
dxjdxk
o
wegen der Symmetrie der zweiten Ableitungen und
damit wirklich
15
Die Energie eines Punktteilchens ist so im Rahmen
der Newtonschen Mechanik im Falle eines konservativen Kraftfeldes eine erhaltene Größe; während der
Bewegung dieses Punktteilchens wird weder Energie
abgegebennoch aufgenommen. Den festen Wert dieser
Größe kann man z. B. für t = 0 aus den Anfangsbedingungen bestimmen : E =& rni2 (0) + U@(O)).
Allgemein nennt man - auch für nichtkonservative
Kräfte - das Integral
r2
A = J Fedr
VxF=O.
v) Umgekehrt gilt natürlich :
Ist V x F + 0, so ist auch F nicht konservativ und
Si; F dr nicht unabhängig vom Wege.
l
die von der Kraft am Punktteilchen längs der Bahn C
zwischen y1 und r2 geleistete Arbeit. Bei einer konservativen Kraft ist A gleich dem Negativen der Änderung der potentiellen Energie des Punktteilchens.
vi) Man kann weiter zeigen: Ist
VxF=O
Für die Lorentz-Kraft KL(f) = e [E@(t)) + i(f) x B@(t))] ist
KL(t) 3(t) =ei(t) E@(t)). Das Magnetfeld leistet also niemals
Arbeit. Wenn das Feld E(r) konservativ ist, läßt sich auch die von der
Lorentz-Kraft geleistete Arbeit als Differenz der potentiellen Energien ausdrücken.
l
in einem einfach zusammenhängenden Gebiet des E3,
so ist dort auch (vgl. Anhang F)
l
F =-vu.
Beispiele
2.4.2 Arbeit und Energiesatz
i) Das homogene Kraftfeld ist konservativ. Das
Potential zu
Kehren wir zurück zu unseren Wegintegralen über das
Kraftfeld F (r).
Ist das Kraftfeld ein konservatives Vektorfeld, so
ist also
F (r) = -V U(v)
7 F(r)&=
und
U(q)-
(2.4.19)
F=A
ist
U= -Aeu+const
Das ist klar, da
V(A*r)=
(&h&A-r,&l*r
1
U(r,) ,
r1
.
2
=(Al,A2,A3)=A
3
ist .
>
(2.4.22)
und somit ist
Mit A =mg ist so U= -mgv,
W2)
+ U(v(t2))
= T(h)
+ W(tl))
.
Das bedeutet, daß die Größe
E=$G2(t)+
U(r(t))
und wenn man die
(2.4.20)
(2.4.21)
eine zeitliche Konstante ist, wenn die Bahnkurve v(t)
Lösung der Bewegungsgleichung ist. Man nennt E die
Energie, T die kinetische Energie12, U(r) die potentielle
Energie12 des Teilchens am Orte Y.
l2 Energie (griech.) Tatkraft, Wirksamkeit ; ursprünglich philosophischer Begriff, bei Aristoteles synonym mit Entelechie, später
als physikalischer Terminus : innewohnende Arbeit, Fähigkeit,
Arbeit zu verrichten.
Kinetische Energie : Bewegungsenergie, von griech. kinein :
bewegen. Potentielle Energie : etwa ,,Energie der Möglichkeit“
von lat. potentia: Macht, Möglichkeit. Ein höher gelegenes
Gewicht hat im Vergleich zu einem tiefer gelegenendie größere
Möglichkeit, Arbeit zu verrichten.
16
2. Die Newtonsche Mechanik
z-Achse in -g-Richtung
U=+mgz
legt, ist so
7
(2.4.23)
.
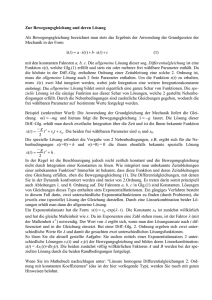
Abb. 2.4.2. Ein nicht rotationsfreies Vektorfeld
A
\
ii) Ist F(v) = f(Y) r/r, r = 1y 1, so ist
U(r) = - j f(r’)dr’=
U(r),
d.h.
r0
u I --
(2.4.24)
f() r 9
denn so ist
-VU(r)= -fg*Vr=f(r)Vr .
(2.4.25)
Es ist aber Vr = r/r.
Insbesondere sind so Gravitationskraft und harmonische Kraft konservativ mit den Potentialfeldern
Y MA42
U(r) - --
(2.4.26)
r
für die Gravitationskraft und
D
U(r)=- 2
Zeichnet man an einigen Punkten den zugehörigen
Vektor F ein, ergibt sich Abb. 2.4.2.
Man sieht unmittelbar, daß
EFmdr
A
abhängig vom Wege ist, da beim rechten Halbkreis F
meistens parallel zu dr, auf dem linken Halbkreis F
meistens antiparallel zu dv ist.
iv) Für eindimensionale Bewegungen ist F(X)
immer konservativ, man kann immer ein U(x) angeben, mit
F(x)=(-d/dx)
r2
(2.4.27)
für die harmonische Kraft F (r) = - Dr.
Ein Kraftfeld der Form
(2.4.3 1)
nämlich die Stammfunktion von - F(x). Dann gilt
$-rn2 + U(x) = E = const. ,
und so
(2.4.32)
2 = + 1/(2/m) [E - U@(t))]
oder
(2.4.33)
(2.4.28)
F (4 = f w +-
heißt rotationssymmetrischesZentralkraftfeld. Allgemein nennt man
ein Kraftfeld, bei dem die Kraft stets in der Verbindungslinie mit
einem Zentrum 0 liegt, ein Zentralkraftfeld. Ein allgemeines Zentralkraftfeld hat also die Gestalt
(2.4.29)
F (4 = g w 4 r
Für rotationssymmetrische Zentralkraftfelder, die, wie wir gesehen
haben, stets konservativ sind, hängt der Betrag der Kraft nur vom
Abstand r vom Zentrum ab. Man überlegt sich leicht, daß nicht
rotationssymmetrische Zentralkraftfelder nicht konservativ sein
können, da sich in diesem Fall sofort ein geschlossenerWeg angeben
läßt, längs dessen das Arbeitsintegral nicht verschwindet.
iii) Ein nichtkonservatives Feld wäre
P=(y, -x,O)
U(x) ,
mit
v=(x,y,z)
Es ist (V x F) = (0, 0, -2),
rotationsfrei.
.
(2.4.30)
dx I
x
t
- dt I =t-t,,
s
s
x. 1/(2/m) [E- U(x’)] - t0
-
(2.4.34)
wobei x. = x(to), x = x(t) sei.
Die Bewegungsgleichung ist also sofort lösbar,
indem man ausnutzt, daß E eine erhaltene Größe ist.
Man erhält so als Lösung
x=x(t;
E, xo) .
Die beiden Parameter E, xo, die die Lösung charakterisieren, stehen für die beiden Anfangsbedingungen
x(O)=&), X(O)=v,. Der Zusammenhang zwischen
E und v. ergibt sich aus
das Vektorfeld ist nicht
uo
=
1/(W)
[E
-
Wo)1
l
(2.4.35)
2.5 Mehrere Punktteilchen in Wechselwirkung
m
17
Sei diese Kraft auf dem i-ten Massenpunkt von der
Form
dann stellen die Bewegungsgleichungen
Abb. 2.4.3. Ein Beispiel einer Potentialfunktion für eine eindimensionale Bewegung mit den erlaubten Aufenthaltsbereichen für
verschiedene Energien
Da die kinetische Energie T nie negativ ist, gilt
E = T+ U 2 U, die Gesamtenergie ist also nie kleiner
als die potentielle Energie, und Gleichheit kann nur
gelten, wenn X =O. Wenn man die Funktion U(X)
aufträgt, so kann man die Bereiche, in denen sich bei
gegebener Energie E das Teilchen aufhalten kann,
sofort ablesen (Abb. 2.4.3).
Man erkennt insbesondere: Wenn x. ein Minimum
von Uist und Eo = U(x,) + ICIetwas größer als U(x,), so
bleibt die Bahnkurve stets in der Nähe der Ruhelage
xo. Wenn andererseits x1 ein Maximum von U ist, so
wird sich bei einer kleinen Änderung der Energie U(q)
zu El = U(q) + E die Bahn weit von x1 entfernen.
Minima des Potentials entsprechen stabilen Gleichgewichtslagen, Maxima labilen Gleichgewichtslagen.
Diese Überlegung gilt sinngemäß auch für mehrdimensionale. Bewegungen. Eine Gleichgewichtslage
ist genau dann stabil, wenn sie zu einem Minimum des
Potentials gehört.
2.5 Mehrere Punktteilchen
in Wechselwirkung
Im vorigen Kapitel hatten wir nur einen Massenpunkt
betrachtet, die Bewegungsgleichung für diesen studiert
und die Energie als erhaltene Größe diskutiert.
Betrachten wir nun N Massenpunkte, so müssen wir
analog verfahren. Die Bewegungsgleichung für den iten Massenpunkt lautet dann :
l?ZiFi(t)=Ki(t) 7
i=l,.
. ,N ,
l
(2.5.1)
wobei mi die Masse des i-ten Teilchens ist und K,(t) die
Kraft ist, die auf das Teilchen i wirkt.
ein System von 3N Differentialgleichungen dar; als
Anfangsbedingungen wären z. B. Vi(O)und ri(O) vorzugeben. Das sind 6N Anfangsbedingungen, durch welche eine Lösung der Bewegungsgleichung eindeutig
bestimmt ist.
Multiplikation mit Yi und Summation über i von 1
bis N ergibt so, nach einer Integration von t1 nach t2 :
oder auch
T(t,) - T(t,) = idt 5 Fi(r, (t), . . . 9 %
(01
dvio
- -&-
dt
i =zz1
t2
(2.5.4)
mit
1 N
T(t) =-2
1
C
AVZiif
(t)
(2.5.5)
l
i=
T(t) nennt man die kinetische Energie des Systems von
IV Punktteilchen. Interessant wäre nun, wenn auch in
diesem allgemeinen N-Teilchen-Fall die Kräfte aus
einem einzigen Potential ableitbar wären.
Um diese Möglichkeit diskutieren zu können, betrachten wir den 3 N-dimensionalen Vektorraum aller
3 N Vektorkoordinaten
Z=V30...@
V3 (Nmal)
Z={z=(r,,...,r,)(riE
-
v”) .
(2.5.6)
Die Lagen aller N Teilchen können dann also
durch Punkte in Z beschrieben werden, indem
man die Ortsvektoren pl,. . . , YN zu einem Vektor
Y ) aus Z zusammenfaßt.
.
%?&r
’ ‘Rtum Z v 3N der möglichen Lagen
des N-Teilchensystem; heißt Konfigurationsraum des
Systems.