Vorlesung
Werbung

Dynamisches kritisches Verhalten nahe und
fernab vom Gleichgewicht
Vorlesung gehalten
von
Hans Werner Diehl
im SS 2008
am
Campus Duisburg der
H. W. Diehl
23. Juni 2008
Inhaltsverzeichnis
1 Erinnerung an die Quantenmechanik: Erwartungswerte und Bilder
talen Dynamik
1.1 Erwartungswerte, Dichteoperatoren . . . . . . . . . . . . . . . . . . .
1.2 Zeitliche Entwicklung von Zuständen und Erwartungswerten . . . . .
1.3 Schrödinger-, Heisenberg- und Wechselwirkungsbild . . . . . . . . . .
1.3.1 Schrödingerbild . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Heisenbergbild . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.3 Wechselwirkungs- oder Dirac-Bild . . . . . . . . . . . . . . . .
der quan.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Lineare Antworttheorie
1
1
1
2
2
4
4
6
3 Greenfunktionen
3.1 Kommutator- und Antikommutator-Greenfunktionen . . .
3.1.1 Definition der (Anti-)Kommutator-Greenfunktionen
3.1.2 Laplacetransformierte der Greenfunktionen . . . . .
3.1.3 Bewegungsgleichungen der Greenfunktionen . . . .
3.1.4 Spektraldarstellung der Greenfunktionen . . . . . .
3.2 Temperatur-Greenfunktionen . . . . . . . . . . . . . . . .
3.3 Spektralfunktion . . . . . . . . . . . . . . . . . . . . . . .
-2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
7
8
8
9
9
13
Dynamisches kritisches Verhalten. . .
4 Fluktuations-Dissipations-Theorem
15
5 Einfache Beispiele aus der klassischen Physik
5.1 Ungedämpfter harmonischer Oszillator . . . . . . . . . . . .
5.2 Ungedämpfter harmonischer Oszillator . . . . . . . . . . . .
5.3 Modenstruktur des gedämpften harmonischen Oszillators . .
5.4 Responsefunktion des gedämpften harmomischen Oszillators
17
17
18
20
21
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6 Summenregeln und asymptotische Entwicklung von Responsefunktionen
26
7 Memoryfunktionsformalismus
7.1 Memoryfunktionsformalismus am Beispiel einer einzigen Variablen
7.2 Memoryfunktionsmatrizen . . . . . . . . . . . . . . . . . . . . . .
7.3 Erweiterung auf die Quantenmechanik . . . . . . . . . . . . . . .
7.4 Kurze Erinnerung an das Problem der Spindiffusion . . . . . . . .
29
29
33
34
35
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8 Brownsche Bewegung als Anwendung des Memoryfunktionsformalismus
9 Allgemeine Eigenschaften von Modellen der kritischen Gleichgewichtsdynamik
9.1 Mikroskopische Modelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Stochastische Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.1 Ausgangspunkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.2 Forderungen an die Wahrscheinlichkeitsverteilung P[O; t] . . . . . . . . .
9.2.2.1 Verträglichkeit mit dem thermodynamischen Gleichgewicht . . .
9.2.2.2 Relaxation ins Gleichgewicht . . . . . . . . . . . . . . . . . . .
9.2.2.3 Kausalität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.2.4 Fluktuations-Dissipations-Theorem . . . . . . . . . . . . . . . .
9.2.3 Definition von kinetischen Koeffizienten, Transportkoeffizienten und charakteristischen Frequenzen . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Erste Beispiele: die stochastischen Modelle A und B . . . . . . . . . . . . . . . .
9.3.1 Charakteristische Funktion einer Wahrscheinlichkeitsverteilung . . . . . .
9.3.2 Gaußsche Verteilung bei vorgegebenem Mittelwert und Varianz . . . . .
9.3.2.1 Der Fall einer einzelnen reellwertigen Zufallsvariablen . . . . . .
9.3.2.2 Verallgemeinerung auf n reellwertigen Zufallsvariablen . . . . .
9.3.3 Die stochastische Gleichungen der Modelle A und B . . . . . . . . . . . .
9.3.3.1 Modell A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.3.2 Modell B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 Phänomenologische Skalentheorie
10.1 Phänomenologische Skalentheorie statisch kritischer Phänomene . . . . . . . . .
10.1.1 Definition der statischen kritischen Exponenten . . . . . . . . . . . . . .
10.1.2 Phänomenologische thermodynamische Skalentheorie . . . . . . . . . . .
10.1.3 Phänomenologische Skalentheorie lokaler Observablen . . . . . . . . . . .
10.2 Phänomenologische Skalentheorie der kritischen Dynamik . . . . . . . . . . . . .
10.3 Lokale dynamische Skaleninvarianz . . . . . . . . . . . . . . . . . . . . . . . . .
10.4 Überprüfung der dynamischen Skalenansätze im Rahmen der Gaußschen Näherung für die Modellen A und B . . . . . . . . . . . . . . . . . . . . . . . . . . .
H.W. Diehl
SS 2008
37
42
42
43
43
43
43
44
44
44
45
45
46
47
47
48
49
49
50
52
52
52
53
56
59
60
61
-1
Dynamisches kritisches Verhalten. . .
11 Benötigtes Hintergrundwissen über stochastische Prozess
64
11.1 Zeitabängige Wahrscheinlichkeitsdichten . . . . . . . . . . . . . . . . . . . . . . 64
11.2 Bedingte Wahrscheinlichkeitsdichten . . . . . . . . . . . . . . . . . . . . . . . . 65
11.3 Stochastische Unabängigkeit und vollständig unkorrelierte stochastische Prozesse 65
11.4 Markov-Prozesse und Chapman-Kolmogorov-Gleichung . . . . . . . . . . . . . . 66
11.5 Master-Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
11.6 Der Spezialfall zeitunabhängiger Übergangswahrscheinlichkeiten, detailliertes Gleichgewicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
11.7 Spezialisierung auf den Fall diskreter Konfigurationsvariablen . . . . . . . . . . . 69
11.8 Kramers-Moyal-Entwicklung und Fokker-Planck-Gleichung . . . . . . . . . . . . 73
12 Einführung in die Feldtheorie der dynamischen kritischen Phänomene
12.1 Formulierung der Modelle als Gauß-Markov-Prozesse . . . . . . . . . . . .
12.2 Äquivalente Langevingleichung . . . . . . . . . . . . . . . . . . . . . . . . .
12.3 Onsager-Machlup-Funktional . . . . . . . . . . . . . . . . . . . . . . . . . .
12.4 Feldtheoretische Formulierung nach Janssen und de Dominicis . . . . . . .
H.W. Diehl
SS 2008
.
.
.
.
.
.
.
.
.
.
.
.
75
75
76
77
79
0
Dynamisches kritisches Verhalten. . .
1
Erinnerung an die Quantenmechanik: Erwartungswerte und Bilder der quantalen Dynamik
1.1
Erwartungswerte, Dichteoperatoren
Gegeben:
•
Ĥ(t) = Ĥ0 + Ĥ1 (t) = Hamiltonoperator
Ĥ(t) beschreibe quantales System; Ĥ1 sei explizit zeitabhängiger Anteil.
• ρ̂(0) = Dichteoperator zum Zeitpunkt t0 .
Für den Erwartungswert einer durch den selbstadjungierten Operator Â(t) im Schrödingerbild dargestellten Observablen zum Zeitpunkt t0 im gemischten Zustand ρ̂(0) gilt dann bekanntlich
hÂ(t0 )i = Sp ρ̂(0) Â(t0 ) .
(1.1)
Ferner lässt sich ρ̂(0) in der Spektralform als
X
ρ̂(0) =
Zustände ν
pν |νihν| ,
(1.2)
wobei {|νi} eine Orthonormalbasis ist:
X
hν|ν ′ i = δνν ′ ,
(1.3)
pν = Sp ρ̂(0) = 1 ,
(1.4)
ν
und
0≤
1.2
pν
|{z}
Besetzungswahrscheinlichkeit
≤1.
(1.5)
Zeitliche Entwicklung von Zuständen und Erwartungswerten
Zum Zeitpunkt t > t0 hat sich ρ̂(0) zu
ρ̂(t) =
X
pν U(t, t0 )|νihν|U(t, t0 )†
ν
= U(t, t0 )ρ̂(0) U(t, t0 )†
(1.6)
entwickelt. Dabei ist U(t, t0 ) der Zeitentwicklungsoperator im Schrödingerbild. Für ihn ergibt
sich aus der Schrödingergleichung die Gleichung
i~
d
U(t, t0 ) = Ĥ(t)U(t, t0 )
dt
(1.7)
mit der Anfangsbedingung (AB)
U(t0 , t0 ) = 1 .
H.W. Diehl
SS 2008
(1.8)
1
Dynamisches kritisches Verhalten. . .
Diese Gleichung bzw. die zeitabhängige Schrödingergleichung für die Zustände |ψ(t)i (angewendet auf |ν(t)i) implizieren, dass ρ̂(t) der Gleichung
i~
d
ρ̂(t) = [Ĥ(t), ρ̂(t)] mit der AB ρ̂(t0 ) = ρ̂(0)
dt
(1.9)
genügt.
Für die zeitliche Entwicklung des Erwartungswertes
hÂi(t) ≡ Spρ̂(t)Â(t)
folgt:
i~
1.3
D A(t) E
d
hÂ(t)it = h[Â(t), Ĥ(t)]it + i~
.
dt
∂t t
(1.10)
Schrödinger-, Heisenberg- und Wechselwirkungsbild
Wir erinnern hier kurz an die verschiedenen Bilder der quantalen Dynamik, nämlich das Schrödingerbild, das Heisenbergbild und das Wechselwirkungs- oder Dirac-Bild.
1.3.1
Schrödingerbild
Beim Schrödingerbild
• steckt die ganze (durch die Schrödingergleichung bestimmte) dynamische Entwicklung in
der Zeitabhängigkeit der Zustände |ψ(t)i.
• Dagegen haben die Observablen darstellenden selbstadjungierten Operatoren  keine
Zeitabhängigkeit bis auf eine eventuell explizite. In diesem Fall schreiben wir Â(t).
Der Zustand |ψ(t)i, welcher aus dem Anfangszustand |ψ (0) i zur Zeit t = t0 hervorgeht,
ergibt sich durch Lösung der zeitabhängigen Schrödingergleichung
i~
d
|ψ(t)i = Ĥ(t)|ψ(t)i
dt
(1.11)
mit der Anfangsbedingung
|ψ(t0 )i = |ψ (0) i .
(1.12)
Die zeitliche Entwicklung wird durch den in Gl. (1.7) auftretenden Zeitentwicklungsoperator
beschrieben:
|ψ(t)i = Û (t, t0 )|ψ (0) i .
(1.13)
Dieser hat folgende bekannte Eigenschaften:
• Gleichzeitigkeitsbedingung:
• Unitarität:
• Gruppeneigenschaft:
H.W. Diehl
Û (t, t) = 11 ;
(1.14)
Û (t, t0 )Û (t, t0 )† = Û (t, t0 )† Û(t, t0 ) = 11 ;
(1.15)
Û (t3 , t2 )Û (t2 , t1 ) = Û(t3 , t1 ) ;
(1.16)
SS 2008
2
Dynamisches kritisches Verhalten. . .
• Verhalten bei Umkehrung der Zeitentwicklung:
Û (t1 , t2 ) = Û(t2 , t1 )−1 .
Durch Integration der Gl. (1.7) erhält man die Integralgleichung
Z
1 t ′
dt Ĥ(t′ ) Û (t′ , t0 )
Û (t, t0 ) =
i~ t0
(1.17)
(1.18)
Durch deren iterative Lösung mit der Anfangsnäherung U(t′ , t0 ) = 11 ergibt sich die Reihe
Z
Z t
Z t2
1 t
1
Û(t, t0 ) = 11 +
dt1 Ĥ(t1 ) +
dt1 Ĥ(t2 ) Ĥ(t1 )
dt2
i~ t0
(i~)2 t0
t0
Z t2
Z t
Z t3
1
dt1 Ĥ(t3 ) Ĥ(t2 ) Ĥ(t1 ) + . . . .
(1.19)
dt2
dt3
+
(i~)3 t0
t0
t0
Im k-ten Term ist über den Sektor tk > tk−1 > . . . > t1 des Hyperkubus [t0 , t]k zu integrieren.
Wären die Reihenfolge der Operatoren im Produkt Ĥ(tk ) · · · Ĥ(t1 ) gleichgültig, würden also
Ĥ(ti ) und Ĥ(tj ) für beliebige ti 6= tj vertauschen, so könnten wir über alle sich durch Permutationen k(k − 1) . . . 1 → jk jk−1 . . . j1 ergebenden k! Sektoren mit tjk > tjk−1 > . . . > tj1
integrieren und durch den Faktor k! divergieren. Dies würde ein Integral über [t0 , t]k liefern.
Im Allgemeinen gilt diese Vertauschbarkeit nicht. Dann tritt im Sektor mit der Zeitordnung
tjk > tjk−1 > . . . > tj1 statt Ĥ(tk ) · · · Ĥ(t1 ) das Produkt Ĥ(tjk ) · · · Ĥ(tj1 ) auf. Nach Einführung
des Zeitordnungsoperators
(
Ĥ(t1 ) Ĥ(t2 ) für t1 > t2 ,
T Ĥ(t1 ) Ĥ(t2 ) =
(1.20)
Ĥ(t2 ) Ĥ(t1 ) für t2 > t1 ,
lässt sich der k-te Term wegen
T Ĥ(tk ) · · · Ĥ(t1 ) = Ĥ(tjk ) · · · Ĥ(tj1 ) für tjk > tjk−1 > . . . > tj1
als
1
k! (i~)k
Z
t
t0
dtk · · ·
Z
(1.21)
t
t0
T Ĥ(tk ) · · · Ĥ(t1 )
schreiben. Das Ergebnis für Û (t, t0 ) lässt sich gut merken, wenn man es als
Rt
Û (t, t0 ) = T e
t0
dt′ Ĥ(t′ )/i~
(1.22)
darstellt. Dies ist formal zu verstehen: Es ist durch seine Entwicklung und die Anwendung des
Zeitordnungsoperators T in den mehrfachen t-Integralen definiert. Im Fall, dass Ĥ(t) ≡ Ĥ
zeitunabhängig ist, reduziert sich Gl. (1.22) auf das bekannte Resultat
Û (t, t0 ) = e(t−t0 )Ĥ/i~ .
H.W. Diehl
SS 2008
(1.23)
3
Dynamisches kritisches Verhalten. . .
1.3.2
Heisenbergbild
Beim Heisenbergbild
• steckt die gesamte dynamische Zeitentwicklung in den Operatoren, während
• die Zustände keinerlei Zeitentwicklung erfahren.
Dies wird durch die Definition der Heisenberg-Operatoren
ÂH (t) = Û (t, t0 )Â(t)Û (t, t0 )†
(1.24)
und der Heisenberg-Wellenfunktion
|ψ H i ≡ Û(t, t0 )† |ψ(t)i = |ψ (0) i .
(1.25)
erreicht.
Mit Hilfe der Definition des Heisenberg-Operators (1.24) lässt sich der zeitabhängige Mittelwert
hÂ(t)it ≡ Spρ(0) Â(t)
(1.26)
als
hÂ(t)it = hÂH (t)i
(1.27)
schreiben. Dabei bedeutet h. . . i ein mit dem Dichte-Operator ρ(0) berechneter Mittelwert.
Der Heisenberg-Operator genügt bekanntlich der Heisenbergschen Bewegungsgleichung
H
d H
∂ Â
H
i~ Â (t) = [Â (t), Ĥ(t)] + i~
(t) .
(1.28)
dt
∂t
Durch Mittelung mit ρ(0) überträgt sich diese Gleichung auf den Mittelwert hÂ(t)it (vgl.
Gl. (1.10)).
1.3.3
Wechselwirkungs- oder Dirac-Bild
Beim Wechselwirkungsbild (welches auch Dirac-Bild genannt wird) steckt man die durch
i
U0 (t, t0 ) = exp − (t − t0 )Ĥ0
~
erzeugte Zeitentwicklung in die Operatoren, während man die verbleibende dynamische Zeitentwicklung in den Zuständen behält. Dies geschieht durch die Definitionen der Operatoren
und der Zustände
ÂI (t) = Uˆ0 (t, t0 )Â(t) Uˆ0 (t, t0 )†
(1.29)
|ψ I (t)i ≡ Uˆ0 (t, t0 )† |ψ(t)i = U I (t, t0 )|ψ (0) i
(1.30)
im Wechselwirkungsbild, wobei
U I (t, t0 ) = Û0 (t, t0 )† Û (t, t0 )
(1.31)
der Zeitentwicklungsoperator in diesem Bild ist.
H.W. Diehl
SS 2008
4
Dynamisches kritisches Verhalten. . .
Durch direktes Nachrechnen überzeugt man sich davon, dass U I (t, t0 ) der Gleichung
i~
d I
U (t, t0 ) = Ĥ1I (t) U I (t, t0 )
dt
(1.32)
mit der Anfangsbedingung
U I (t0 , t0 ) = 11
(1.33)
genügt. Infolgedessen lässt sich U I (t, t0 ) in der Form
I
−i
U (t, t0 ) = T e
Rt
t0
dt′ Ĥ1I (t′ )/~
(1.34)
darstellen.
Da ÂI (t) dem Heisenberg-Operator bezüglich Ĥ0 entspricht, ist evident, dass dieser Operatorr der Bewegungsgleichung
I
∂ Â
d I
I
(t)
i~ Â (t) = [Â (t), Ĥ0 ] + i~
dt
∂t
(1.35)
genügt.
H.W. Diehl
SS 2008
5
Dynamisches kritisches Verhalten. . .
2
Lineare Antworttheorie
Wir betrachten ein Vielteilchensystem, welches im Gleichgewicht durch den Dichteoperator
ρeq = Z0−1 e−β Ĥ0
(2.1)
beschrieben wird. Im Gleichgewichtszustand ρeq sind Mittelwerte nicht explizit zeitabhängiger
Observablen Â(x) zeitunabhängig. Dies folgt sofort aus der Bewegungsgleichung (1.10) beziehungsweise der Vertauschbarkeit von U0 (t, t0 )† mit ρeq :
(eq)
hÂ(x)it
≡ Sp U0 (t, t0 )ρeq U0 (t, t0 )† Â(x) = Sp U0 (t, t0 )U0 (t, t0 )† ρeq Â(x) = hÂ(x)i(eq) . (2.2)
Wir fragen nun, wie sich der Mittelwert von  ändert, wenn das System durch einen
zeitabhängigen Zusatzterm
Z
Ĥ1 (t) = − dd x F (x, t) B̂(x, t)
(2.3)
gestört wird. Dabei begnügen wir uns, die Antwort des Systems auf diese Störung in linearer Ordnung zu bestimmen ( lineare Antworttheorie“). Für den Nichtgleichgewichtsmittelwert
”
erhalten wir im Wechselwirkungsbild
(neq)
hÂ(x)it
= Sp U I (t, t0 )ρ(0) U I (t, t0 )† ÂI (x, t) ,
(2.4)
wobei U I (t, t0 ) durch Gl. (1.34) gegeben ist. Wir entwickeln diesen Operator bis zur 1. Ordnung
in Ĥ1I (t). Durch Ausnützung der zyklischen Invarianz der Spur ergibt sich
Z
i t ′ I
(neq)
(eq)
dt h[Â (x, t), Ĥ1I (t′ )]i(eq) + . . .
(2.5)
hÂ(x)it
= hÂ(x)i −
~ t0
Z
Z
i t ′
(eq)
= hÂ(x)i +
dd x F (x′ , t′ )h[ÂI (x, t), B̂ I (x′ , t′ )]i(eq) . + . . . (2.6)
dt
~ t0
Def.: Die lineare Antwortfunktion (Responsefunktion) χAB (x, t; x′, t′ ) beschreibt die Antwort
des Mittelwertes von Â(x) zur Zeit t auf eine zur Zeit t′ am Ort x′ wirkende Störung der Form
(2.3):
(neq) δh
Â(x)i
t
.
(2.7)
χAB (x, t; x′ , t′ ) ≡
′
′
δF (x , t ) F =0
Aus Gl. (2.5) lesen wir ab, dass
i
h[ÂI (x, t), B̂ I (x′ , t′ )]i(eq) für t > t′ .
(2.8)
~
Aus Kausalitätsgründen — die Ursache muss zeitlich vor der Wirkung liegen — muss χAB (x, t; x′, t′ )
für t < t′ verschwinden, d.h. χAB (x, t; x′, t′ ) muss ∝ θ(t − t′ ) sein, wobei
(
1 für t > 0 ,
(2.9)
θ(t) =
0 für t < 0 ,
χAB (x, t; x′, t′ ) =
die Heavisidesche Sprungfunktion ist. Als Wert bei t = 0 definiert man oft θ(0) = 1/2, doch
ist dieser Wert nicht wichtig, wenn θ(t) mit glatten Funktionen (Testfunktionen) integriert
wird, denn die Änderung eines Integranden auf einer Menge vom Lebesgue-Maß 0 ändert das
Lebesgue-Integral nicht.
H.W. Diehl
SS 2008
6
Dynamisches kritisches Verhalten. . .
3
3.1
3.1.1
Greenfunktionen
Kommutator- und Antikommutator-Greenfunktionen
Definition der (Anti-)Kommutator-Greenfunktionen
(ret)
Das obige Resultat legt es nahe, Kommutator-Greenfunktionen GA,B (x, t; x′ , t′ ) einzuführen.
(ret)
Neben der retardierten Greenfunktion GA,B (x, t; x′, t′ ) führen wir auch eine avancierte Green(av)
funktion GA,B (x, t; x′, t′ ) durch
−i
h[ÂI (x, t), B̂ I (x′ , t′ )]i(eq) θ(t − t′ ) ,
~
i
(av)
h[ÂI (x, t), B̂ I (x′ , t′ )]i(eq) θ(t′ − t)
GA,B (x, t; x′, t′ ) ≡
~
(ret)
GA,B (x, t; x′, t′ ) ≡
(3.1)
(3.2)
ein.
Nebenbemerkung: Im Hinblick auf fermionische Systeme betrachtet man auch analog definierten Antikommutator-Greenfunktionen. Wenn wir Kommutator bzw. Antikommutator als
(
[Â, B̂] = ÂB̂ − B̂ Â
für s = −1 ,
{Â, B̂}s ≡
(3.3)
{Â, B̂}+ = ÂB̂ + B̂ Â für s = +1 ,
bezeichnen, dann lassen sich die Definitionen beider Typen von Greenfunktionen zu
−i
h{ÂI (x, t), B̂ I (x′ , t′ )}s i(eq) θ(t − t′ ) ,
(3.4)
~
i
(av)
h{ÂI (x, t), B̂ I (x′ , t′ )}s i(eq) θ(t′ − t) ,
(3.5)
GA,B (x, t; x′, t′ ) ≡
~
zusammenfassen. Wir werden in der Regel Kommutator-Greenfunktionen betrachten. In den
Fällen, in denen auch Antikommutator-Greenfunktionen gemeint sind, wird dies durch das
Auftauchen von s zu erkennen sein.
Es ist leicht zu sehen, dass Funktionen für thermische Gleichgewichtszustände ρeq nur von
der Zeitdifferenz t − t′ abhängen. Um dies zu zeigen, muss man nur die zyklische Invarianz der
Spur und die Vertauschbarkeit von ρeq und U0 ausnützen:
(ret)
GA,B (x, t; x′, t′ ) ≡
h[ÂI (t), B̂ I (t′ )]i(eq)
io
h
n
iĤ0 t/~
−iĤ0 (t−t′ )/~
−iĤ0 t′ /~
iĤ0 t′ /~
iĤ0 (t−t′ )/~
−iĤ0 t/~
−1
−β Ĥ0
e
Âe
B̂e
−e
B̂e
Âe
= Z0 Sp e
io
h
n
′
′
′
′
= Z0−1 Sp e−β Ĥ0 eiĤ0 (t−t )/~Âe−iĤ0 (t−t )/~B̂ − B̂ eiĤ0 (t−t )/~Âe−iĤ0 (t−t )/~
= h[ÂI (t − t′ ), B̂]i(eq)
Das Ergebnis bedeutet, dass retardierte und avancierte Greenfunktionen nur von der Zeitdifferenz abhängen:
ret/av
ret/av
GAB (x, t; x′ , t′ ) = GAB (x, x′; t − t′ ) .
(3.6)
Die rechts- bzw. linksseitigen Grenzwerte von G(ret/av) sind durch
(ret/av)
GAB
i
(x, x′; ±0) = ∓ h{Â, B̂}s i(eq)
~
(3.7)
gegeben.
H.W. Diehl
SS 2008
7
Dynamisches kritisches Verhalten. . .
3.1.2
Laplacetransformierte der Greenfunktionen
(ret/av)
Als Responsefunktionen sind GA,B (x, x′ , t) bei beliebigen festen Positionen x und x′ betraglich beschränkt:
(ret/av)
|GA,B (x, x′, t)| ≤ Mx,x′ < ∞
Daher sind die Laplacetransformierten
Z
(ret)
ĜA,B (z) =
(av)
ĜA,B (z)
=
Z
∞
0
dt eizt/~ G(ret) (t) , ℑz > 0 ,
(3.8)
dt eizt/~ G(av) (t) , ℑz < 0 ,
(3.9)
0
−∞
in den angegebenen Definitionsgebieten ℑz ≷ 0 holomorphe Funktionen. Wir haben hier die
Orte x, x′ unterdrückt. Dies werden wir zur Kürzung der Notation gelegentlich auch in Zukunft
tun.
(ret)
(av)
Da sich die Definitionsgebiete der Funktionen ĜA,B (z) und ĜA,B (z) nicht überlappen, kann
man sie zu einer abseits der reellen Achse definierten holomorphen Funktion
Z ∞
(ret/av)
ĜA,B (z) =
dt GAB (t) eizt/~
(3.10)
−∞
zusammenfassen.
3.1.3
Bewegungsgleichungen der Greenfunktionen
Als Konsequenz der Bewegungsgleichung (1.35) für die Operatoren ÂI (t) gilt
i~
d (ret/av)
(ret/av)
(ret/av)
GA,B (t) = G[A,H0],B (t) = GA,[B,H0 ] (t) ,
dt
(3.11)
wobei die zweite Gleichung sich wieder durch Ausnützung der zyklischen Invarianz der Spur
und der Vertauschbarkeit von U0 (t, t0 ) mit ρeq ergibt.
Die Laplacetransformation dieser Gleichung ergibt sich mittels partieller Integration. Wegen
Z ∞ Z ∞
∞
d (ret)
(ret)
(ret)
izt/~
izt/~
i~
dt
dt GA,B (t) eizt/~
GA,B (t) e
= i~ GA,B (t) e
+z
dt
0
0
0
(ret)
= −i~ GA,B (0+) + z ĜA,B (z) ,
ℑz > 0 ,
(av)
und der analogen Gleichung für GA,B folgt
z ĜA,B (z) − h{A, B}s i(eq) = Ĝ[A,H0 ],B (z) = ĜA,[H0 ,B] (z) .
(3.12)
Die Schwierigkeit von Vielteilchensystemen äussert sich darin, dass der Kommutator [A, H0 ] in
der Regel nichttrivial ist. Das heißt, in der Bewegungsgleichung für ĜA,B (z) taucht eine kompliziertere Greenfunktion auf, in deren Bewegungsgleichung ihrerseits wieder höhere Greenfunk”
tionen“ auftreten. Nur wenn man die höheren Greenfunktionen durch die bisher betrachteten
nähern kann, ergeben sich geschlossene Gleichungssysteme.
H.W. Diehl
SS 2008
8
Dynamisches kritisches Verhalten. . .
3.1.4
Spektraldarstellung der Greenfunktionen
Es ist nützlich, sich die Greenfunktion in der Spektraldarstellung anzusehen. Es sei{|mi} ein
vollständig orthonormales System von Eigenfunktionen von Ĥ0 :
X
m
Ĥ0 |mi = ǫm |mi ,
(3.13)
hm|m′ i = δm,m′ ,
(3.14)
|mihm| = 11.
(3.15)
Durch direkte Berechnung findet man nach dem Einschieben von 11:
h
X
−i
(ret)
θ(t)
e−βǫm hm|Â|m′ ihm′ |B̂|miei(ǫm −ǫm′ )t/~
GA,B (t) =
~Z0
m,m′
i
′
′
i(ǫm′ −ǫm )t/~
+ s hm|B̂|m ihm |Â|mie
X
−i
−βǫm
−βǫm′
′
′
i(ǫm −ǫm′ )t/~
=
θ(t)
e
+se
hm|Â|m ihm |B̂|mie
~Z0
′
(3.16)
m,m
bzw.
(av)
GA,B (t) =
X
i
θ(−t)
hm|Â|m′ ihm′ |B̂|miei(ǫm −ǫm′ )(−t)/~ e−βǫm + s e−βǫm′
~Z0
′
(3.17)
m,m
Für die Laplacetransformierte ergibt sich daraus
1 X hm|Â|m′ ihm′ |B̂|mi −βǫm
−βǫm′
.
e
+se
ĜA,B (z) =
Z0
z + ǫm − ǫm′
′
(3.18)
m,m
Die Spektraldarstellung (3.18) ist aufschlussreich. Sie zeigt, dass die einzelnen Summanden
einfache Pole bei den Energiedifferenzen z = ǫm′ − ǫm derjenigen Zustände haben, zwischen
denen  und B̂ nicht-verschwindende Matrixelemente haben.
Diese Spektraldarstellung gilt für endlich ausgedehnte Systeme, weil nur für diese das Spektrum von Ĥ0 diskret ist. Bei unendlich ausgedehnten Systemen häufen sich die Anregungsenergien und damit die Pole, so dass diese dicht liegen. Es kommt aber oft vor, dass gewisse Bereiche
der reellen Achse singularitätsfrei bleiben, weil es keine nicht-verschwindenden Matrixelemente
der betrachteten Operatoren mit der entsprechenden Energiedifferenz ǫm′ − ǫm gibt. In diesen
Fällen setzt sich ĜA,B (z) analytisch auf diese singularitätsfreien Bereiche der reellen Achse fort.
3.2
Temperatur-Greenfunktionen
Es erweist sich als sinnvoll, noch eine zweite Art von Greenfunktionen einzuführen — die
sogenannten Temperatur-Greeenfunktionen (Matsubara-Greenfunktionen). Wir werden sehen,
(ret/av)
dass diese eng mit den (Anti-)Kommutator-Greenfunktionen GA,B
zusammenhängen. Um
sie zu definieren, fı̈hren wir zunächst das Analogon zum Wechselwirkungsoperator ÂI (t) (bzw.
Heisenbergoperator ÂH0 (t)) für imaginäre Zeiten
H.W. Diehl
τ = it/~
(3.19)
SS 2008
9
Dynamisches kritisches Verhalten. . .
ein, nämlich
Âτ = eĤ0 τ Âe−Ĥ0 τ .
(3.20)
Def.: Temperatur-Greenfunktion
Die Temperatur- oder Matsubara–Greenfunktion ist durch
hAτ Bτ ′ i(eq)
gA,B (τ − τ ′ ) ≡ −hTs (Aτ Bτ ′ )i(eq) = −
(−s) hB ′ A i(eq)
τ
τ
für 0 < τ − τ ′ < β ,
für = β < τ − τ ′ < 0 .
(3.21)
definiert, wobei die zweite Gleichung den Zeitordnungsoperator Ts definiert.
Man beachte:
a) Für s = −1 ordnet Ts die Operatoren Âτ und B̂τ entsprechend der Ordnung ihrer τ -Werte.
b) Die in Gl. (3.21) angegebenen Einschränkungen 0 < τ − τ ′ < β und β < τ − τ ′ < 0
garantieren, dass die Greenfunktionen sinnvoll definiert sind. Sie stellen sicher, dass nur
′′
Ausdrücke e−τ Ĥ0 mit positiven τ ′′ -Werten auftreten (wobei τ ′′ = τ, τ ′ , |τ − τ ′ |). Da Ĥ0
′′
′′
nach unten bechränkt ist, ist dies auch e−τ Ĥ0 , sofern ℜτ ′′ > 0. Die auftretenden e−τ Ĥ0
sind unter dieser Voraussetzung holomorphe Operatoren.
c) gA,B (τ ) springt bei τ = 0 um den Wert −h{Â, B̂}s i(eq) .
d) Da e−τ Ĥ0 ein für ℜτ > 0 holmorpher Operator ist, kann gA,B (τ ) in die beiden Streifen
0 < ℜτ < β und −β < ℜτ < 0 analytisch fortgesetzt werden. An der gemeinsamen
Grenze der beiden Streifen, ℜτ = 0, springt die Temperatur-Greenfunktion um
(ret)
für t > 0 ,
~ GA,B (t = ~τ /i)
(3.22)
gA,B (τ + 0) − gA,B (τ − 0) =
i (−1)G(av) (t = ~τ /i) für t < 0 .
A,B
e) Wegen
}|
{
z
hB̂ Âτ i(eq) = Z0−1 Sp |e−Ĥ{z0 β B̂} eĤ0 τ Âe−Ĥ0 τ
−→
=
Z0−1 Sp
−Ĥ0 [β−(β+τ )]
e
= hÂτ +β B̂i(eq)
←−
−Ĥ0 (β+τ )
Âe
B̂
sind die Werte von gA,B (τ ) in den beiden Streifen über die Periodizitäts- bzw. Antiperiodizitätsbeziehung
gA,B (τ ) = (−s) gA,B (τ + β) für − β < ℜτ < 0
(3.23)
miteinander verknüpft.
H.W. Diehl
SS 2008
10
Dynamisches kritisches Verhalten. . .
Wir können die Temperatur-Greenfunktionen im Streifen (−β, β) in eine Fourierreihe entwickeln. Die Fourierkoeffizienten sind durch
Z
πm
1 β
(m)
gA,B (τ ) eiωm τ dτ mit ωm =
(3.24)
GA,B =
2 −β
β
gegeben. Aufgrund der (Anti-)Periodizitätseigenschaft (3.23) verschwinden im Falle von s = +1
die Koeffizienten für gerades m und im Falle von s = −1 die für ungerades m. Daher erhalten
wir die Fourierreihen
P
∞
(2m+1)
GA,B eiω2m+1 τ dτ für s = +1 ,
1 m=−∞
gA,B (τ ) =
(3.25)
∞
P
β
(2m) iω2m τ
GA,B e
dτ
für s = −1 .
m=−∞
(m)
Es ist nicht schwierig, nachzuweisen, dass die Fourierkoeffizienten GA,B mit der Ausnah(0)
me von GA,B (bei s = −1) durch die Werte der laplacetransformierten (Anti-)KommutatorGreenfunktionen an iωm gegeben sind:
(2m+1)
GA,B
(2m)
GA,B
= ĜA,B (iω2m+1 ) im Falle von s = +1 ,
(3.26)
= ĜA,B (iω2m ) für m 6= 0 im Falle von s = −1 .
(3.27)
Um dies beispielsweise für s = +1 zu beweisen, nützt man die Antiperiodizität aus, um
zu sehen, dass das Integral in Gl. (3.24) das Dopplelte des Integrals über das Intervall (0, β)
ist. Dann deformiert man den Integrationsweg und verwendet die Antiperiodizitätsbedingung
erneut:
R
R
Z β
i∞ − β+i∞
für ω2m+1 > 0 ,
0
β
(2m+1)
GA,B
=
dτ gA,B (τ ) eiω2m+1 τ = R −i∞ R β−i∞
0
− β
für ω2m+1 < 0
0
R
i∞ dτ gA,B (τ + i0) − gA,B (τ − i0)] eiω2m+1 τ
0
=
R −i∞ dτ g (τ + i0) − g (τ − i0)] eiω2m+1 τ
A,B
A,B
0
R
−ω2m+1 t/~
∞ dt G(ret)
A,B (t) e
0
=
R 0 dt G(av) (t) e−ω2m+1 t/~
A,B
−∞
= ĜA,B (iω2m+1 ) .
Der Beweis im Falle von s = −1 läuft ähnlich, allerdings gilt dabei die Einschränkung ω2m 6= 0.
(2m+1)
(2m)
Es stellt sich heraus, dass die Fourierkoeffizienten GA,B
bzw. GA,B die Funktion ĜA,B (z
vollständig charakterisieren, denn aus Sätzen der Funktionentheorie folgt, dass es nur eine
einzige in den Halbebenen ℑz > 0 und ℑz < 0 holomorphe Funktion und im Unendlichen
beschränkte Funktion ĜA,B (z) gibt, die den Bedingungen (3.26) bzw. (3.27) genügt (Übungsaufgabe).
H.W. Diehl
SS 2008
11
Dynamisches kritisches Verhalten. . .
Dieser Sachverhalt lässt sich ausnützen, um die Fourierreihen für gA,B (τ ) in den Streifen
−β < ℜτ < β analytisch fortzusetzen. Um dies für den Fall s = +1 zu tun, führen wir die
Fermi-Funktion
βz
1
1
1 − tanh
(3.28)
=
f (z) = βz
e +1
2
2
ein. Diese hat an z = iω2m+1 einfache Pole mit Residuen Resiω2m+1 f (z) = −1/β. Mit Hilfe des
Residuensatzes findet man zunächst für reellwertige τ , dass sich die Fourierreihe — und damit
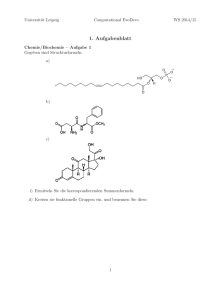
gA,B (τ ) — durch ein Integral entlang des in Abb. 1 gezeigten Weges C darstellen lässt:
C
iω1
C
iω−1
Abbildung 1: Auswertung von Matsubara-Summen mittels komplexer Integration. Die Beiträge
über die gestrichelten Wegstücke verschwinden, wenn der Radius unendlich wird. Die fetten
Punkte sind Matsubara-Frequenzen ωk mit ungeradem k; die offenen Kreise sind solche mit
geradem k.
s = +1 :
R
−1 dz ĜA,B (z) f (z) e−zτ
2πi C
gA,B (τ ) =
1 R dz Ĝ (z) [1 − f (z)] e−zτ
A,B
2πi C
(−β < ℜτ < 0) ,
(0 < ℜτ < β) .
(3.29)
Aufgrund des erwähnten Eindeutigkeitssatzes gilt diese Darstellung im ganzen τ -Streifen. Insbesondere folgen für reelle Zeiten t (τ = it/~) die Korrelationsfunktionen
s = +1 :
s = +1 :
I
hÂ
(t)B̂i(eq)
cum
hB̂ ÂI (t)i(eq)
cum
−1
=
2πi
−1
=
2πi
Z
C
Z
dz ĜA,B (z) [1 − f (z)] e−izt/~ ,
dz ĜA,B (z) f (z) e−izt/~ .
C
Im Fall s = −1 führt man die Bose-Funktion
1
βz
1
g(z) = βz
coth
=
−1
e −1
2
2
H.W. Diehl
(3.30)
SS 2008
(3.31)
12
Dynamisches kritisches Verhalten. . .
ein. Dies hat an z = iω2m einfache Pole mit Residuen Resiω2m g(z) = 1/β. Für die Korrelationsfunktion ergibt sich analog
R
1
(0)
−zτ
(−β < ℜτ < 0) ,
GA,B 2πi C dz ĜA,B (z) g(z) e
(3.32)
s = −1 : gA,B (τ ) =
+
1 R dz Ĝ (z) [1 + g(z)] e−zτ (0 < ℜτ < β) .
β
2πi
A,B
C
Für die Korrelationsfunktionen erhält man daraus
s = −1 :
s = −1 :
I
hÂ
(t)B̂i(eq)
cum
hB̂ ÂI (t)i(eq)
cum
−1
=
2πi
Z
(0)
−izt/~
dz ĜA,B (z) [1 + g(z)] e
C
GA,B
−
,
β
(0)
Z
(3.33)
GA,B
−1
dz ĜA,B (z) g(z) e−izt/~ −
.
=
2πi C
β
Nun ist gA,B (τ ) bei τ = 0 im Allgemeinen unstetig. In solchen Fällen liefert das Nullsetzen
von τ in der Fourierreihe das arithmetische Mittel des recht- und linksseitigen Grenzwertes,
also [gA,B (0+) + gA,B (0−)]/2. Dies bedeutet, dass
∞
1 X (2m) 1
G
+ hÂB̂ + B̂ Âi(eq) = 0
β m=−∞ A,B
2
(3.34)
(0)
Über diese Summenregel ist der noch fehlende Fourierkoeffizient GA,B festgelegt.
Einfache Tests der Gleichungen (3.30) und (3.33) ergeben sich durch die Addition der beiden
Gln. (3.30) bzw. der Subtraktion der unteren der Gl. (3.33) von der oberen. Die Ergebnisse
lassen sich in der Form
Z
−1
I
(eq)
h{Â (t), B̂}s i
=
ĜA,B (z) e−izt/~ dz
(3.35)
2πi C
zusammenfassen. Dies ist nichts anderes als die Umkehrung der Laplace-Transformationen (3.8)
(ret)
und (3.9) bzw. (3.10). Der Beitrag vom Wegstück in der oberen Halbebene liefert GA,B (t), der
(av)
vom Wegstück in der unteren Halbebene GA,B (t).
Da ĜA,B (z) für ℑz 6= 0 holomorph ist und sich im Unendlichen wie O(1/z) verhält, gilt
nach Cauchy die Darstellung
Z
ĜA,B (z)
ĜA,B (z) =
dz .
(3.36)
′
C z −z
3.3
Spektralfunktion
Def.: Spektralfunktion
Wir führen nun eine Funktion von großer Bedeutung ein, die sogenannte Spektralfunktion
Z
1 ∞
σA,B (ω) =
h{ÂI (t), B̂}s i(eq) dt
~ −∞
= i ĜA,B (ω + i0) − ĜA,B (ω − i0) ,
H.W. Diehl
SS 2008
(3.37)
13
Dynamisches kritisches Verhalten. . .
für reellwertiges ω ein.
Diese hat i.A. Distributionscharakter, denn die bekannte Formel
P
1
∓ iπ δ(ω − ω0 )
=
ω − ω0 ± i0
ω − ω0
(3.38)
(mit P = Hauptwert) zeigt, dass jeder isolierte Pol von ĜA,B (z) einen Deltafunktionsbeitrag
liefert. Dies sieht man deutlich an ihrer Spektraldarstellung
2π X
−βǫm
′
′
−βǫm′
′
hm|Â|m ihm |B̂|mi δ(ω + ǫm − ǫm ) e
+se
,
(3.39)
σA,B (ω) =
Z0 m,m′
welche sich aus der Darstellung (3.18) für ĜA,B (z) in Verbindung mit Gl. (3.37) ergibt.
Mit Hilfe der Spektralfunktion lassen sich verschiedene obige Gleichungen einfacher schreiben. So gilt beispielsweise
Z ∞
σA,B (ω) dω
.
(3.40)
ĜA,B (z) =
−∞ z − ω 2π
Entsprechend kann man Gl. (3.35) als
I
h{Â (t), B̂}s i
(eq)
=
Z
∞
σA,B (ω) e−iωt/~
−∞
dω
2π
(3.41)
umschreiben. Durch Bildung von Zeitableitungen dieser Gleichung und der Wahl t = 0 erhält
man Momente der Spektralfunktion; für die nullten und ersten Momente findet man
h{Â, B̂}s i
(eq)
=
Z
∞
σA,B (ω)
−∞
h{[Â, Ĥ0 ], B̂}s i(eq) =
Z
dω
,
2π
∞
dω
ω σA,B (ω)
.
2π
−∞
(3.42)
Höhere Momente ergeben sich in offensichtlicher Weise.
Bemerkung: Grundsätzlich kann man sowohl Anti- (s = +1) als auch Kommutator-Greenfunktionen (s = −1) betrachten. Man wird normalerweise s so wählen, dass {Â, B̂}s ein einfacher Operator ist. Wenn man beispielsweise  ein Fermionenvernichtungsoperator aα und
B̂ = a†β ein Fermionenerzeugungsoperator ist, empfiehlt sich die Wahl s = +1, weil der Antikommutator dieser Operatoren eine c-Zahl“ — d.h. von der Form const 11) — ist.1 Wenn Â
”
und B̂ Produkte einer ungeraden Zahl solcher Fermioperatoren sind, empfiehlt sich die Wahl
s = +1, sonst in der Regel s = −1.
1
In diesem Fall sind die Operatoren natürlich nicht — wie zuvor angenommen — selbstadjungiert.
H.W. Diehl
SS 2008
14
Dynamisches kritisches Verhalten. . .
4
Fluktuations-Dissipations-Theorem
Wir betrachten die Korrelationsfunktion
CAB (t, t′ ) = hAI (t)B I (t′ )icum
= hAI (t)B I (t′ )i − hAI (t)ihB I (t′ )i ,
| {z }
=hAi
wobei h.i ≡ h.ieq wie bisher einen Gleichgewichtsmittelwert (Dichteoperator ρeq ) bedeutet. Das
Fluktuations-Dissipations-Theorem stellt einen Zusammenhang zwischen der Dissipationsfunktion χ′′AB und der Korrelationsfunktion CAB her. Dabei ist χ′′AB die zur Responsefunktion χAB
für Störungen aus dem Gleichgewicht gehörende Dissipationsfunktion.
Nach Einführung von
δA(t) ≡ AI (t) − hAi
(4.1)
können wir CAB (t − t′ ) als
−(1/i~)(i~β)H
CAB (t)
0
h z }| {
i
Z0−1 Sp e −βH0 δA(t)δB(0)
h
i
−1
−βH0
Z0 Sp δA(t + i~β) e
δB(0)i
h
i
Z0−1 Sp e−βH0 δB(0) δA(t + i~β)
=
=
=
|{z}
zykl. Inv. von Sp
CBA (−t − i~β) ,
=
(4.2)
so dass
CBA (−t) = CAB (t + i~β) = eiβ~∂t CAB (t) ,
R
was nach Fourierintegration dt . . . eiωt
(4.3)
C̃AB (−ω) = C̃BA (ω) e−β~ω
(4.4)
2~ χ′′AB (r, r ′ ; t) = CAB (r, r ′ ; t) − CBA (r ′ r; −t) ,
(4.5)
2~χ̃′′AB (r, r ′ ; ω) = C̃AB (r, r ′ ; ω) − C̃BA (r ′ r; −ω) .
(4.6)
ergibt. Nach Definition gilt
Daraus folgt das Fluktuations-Dissipationstheorem
2~χ′′AB (r, r ′ ; t) =
2~χ̃′′AB (r, r ′ ; ω)
=
1 − e−iβ~∂t CAB (r, r ′; t) ,
1 − e−β~ω C̃AB (r, r ′ ; ω) .
(4.7)
Wenn man statt CAB (t) die symmetrisierte Korrelationsfunktion
(sym)
CAB (t)
H.W. Diehl
i
1h
1
≡ h[δA(t), δB(0)]+ i = CAB (t) + CBA (−t)
2
2
SS 2008
(4.8)
15
Dynamisches kritisches Verhalten. . .
einführt, so kann man das FDT auch in der Form
(sym)
~ C̃AB (ω) = coth(β~ω/2) χ̃′′AB (ω)
(4.9)
schreiben.
Im klassischen Limes ~ → 0 ergibt sich aus Gl. (4.7)
χ̃′′AB (ω) =
βω
C̃AB (ω) (klass. Grenzfall) .
2
(4.10)
Es lässt sich im übrigen eine quantenmechanische Korrelationsfunktion ΦAB (t, t′ ) = ΦAB (t−
t′ ) angeben, die exakt einem FDT der Form
i∂t φAB (t) =
2 ′′
χ (t)
β AB
genügt.
Übungsaufgabe: Zeigen Sie, dass die durch
Z β ′
dβ
′
hδA(t) δB(t′ + i~β ′ )i
ΦAB (t, t ) ≡
β
0
(4.11)
(4.12)
definierte quantenmechanische
Korrelationsfunktion dem FDT (4.11) genügt.
R
Tipp: Vertauschen Sie dβ ′ mit ∂t , drücken Sie ∂t durch ∂β ′ aus, und verwenden Sie dann
das Ergebnis unter Zuhilfenahme von Gl. (4.3) um.
H.W. Diehl
SS 2008
16
Dynamisches kritisches Verhalten. . .
5
Einfache Beispiele aus der klassischen Physik
5.1
Ungedämpfter harmonischer Oszillator
Klassiche Hamiltonfunktion des ungedämpften, eindimensionalen harmonischen Oszillators:
H(x, p) =
k
p2
+ x2 .
2m 2
(5.1)
Kanonische Gleichungen:
ẋ = {x, H} =
p
,
m
(5.2)
ṗ = {p, H} = −kx ,
wobei die Poissonklammer {., .} durch
{F , G} ≡
∂F ∂G ∂G ∂F
−
∂x ∂p
∂x ∂p
(5.3)
definiert ist.
Die Suche nach komplexwertigen Lösungen mit x und p ∝ e−iωt der kanonischen Gleichungen (5.2) führt zur charakteristischen Gleichung
−iω −1/m
k !
=0.
(5.4)
= −ω 2 +
k
m
−iω Die Real- oder Imaginärteile der komplexwertigen Lösungen liefern reellwertige Lösungen.
Es gibt also zwei Moden mit den Frequenzen
p
(5.5)
ω = ±ω0 = ± k/m .
Dies zeigt:
• ∃ pro Freiheitsgrad (x und p) jeweils 1 Mode.
• Die Zeitabhängigkeit eines jeden Freiheitsgrades ist durch eine Differenzialgleichung 1.
Ordnung gegeben.
Dies sind allgemeine Eigenschaften, die auch in der Hydrodynamik und bei spontan gebrochenen
Symmetrien gelten.
• Verhalten bei Zeitumkehr:
Θ : x(t) 7→ ǫx x(−t) = x(−t) ,
Θ : p(t) 7→ ǫp p(−t) = −p(−t) ,
ǫx = +1 .
ǫp = −1 .
(5.6)
(5.7)
In den Bewegungsgleichungen werden die ersten t-Ableitungen von Größen ξi = x, p mit
gegebener Signatur ǫi = ±1 bezüglich Zeitumkehr mit Größen ξj mit entgegengesetzter
Zeitspiegelungssignatur ǫj = −ǫi verknüpft. Dies führt dazu, dass nichttriviale reellwertig Lösungen der charakteristischen Gleichung existieren. Auch dies ist eine allgemeine
Eigenschaft.
H.W. Diehl
SS 2008
17
Dynamisches kritisches Verhalten. . .
• Aus den Lösungen den kanonischen Bewegungsgleichungen (DGL 1. Ordnung) folgt selbstverständlich die übliche Newtonsche DGl 2. Ordnung
ẍ + ω02 x = 0 .
5.2
(5.8)
Ungedämpfter harmonischer Oszillator
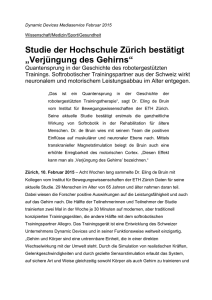
Wir stellen uns ein Teilchen der Masse m in einer viskosen Flüssigkeit vor.
Abbildung 2: Teilchen, welches sich in unter dem Einfluss einer Federkraft und der durch eine
viskose Flüssigkeit verursachten Reibung bewegt.
Die viskose Flüssigkeit veruracht eine Reibungskraft
fvis = −αv .
(5.9)
Dabei hat α. die Reibungskonstant, die Dimension
[α] =
Masse
.
Zeit
Man schreibt Gl. (5.9) auch in der Form
v = −α−1 fvsi
(5.10)
und nennt α−1 Mobilität.
Nach Stokes gilt für eine sich in einer Flüssigkeit der Viskosität η mit der konstanten Geschwindigkeit v bewegende Kugel vom Radius R:
α = 6πηR .
(5.11)
Die Dimension der Viskosität ist
[η] =
[m]
Energie × Zeit
=
.
[R][t]
[R]3
(5.12)
Größenordnungsmäßig gilt
η≃
H.W. Diehl
nFl
|{z}
τc
|{z}
kB T .
(5.13)
Teilchenzahldichte der Flüssigkeit mittl. Zeit zw. moelularen Stößen
SS 2008
18
Dynamisches kritisches Verhalten. . .
Für Frequenzen ω & τc−1 muss fvis verschwinden, weil beide Zeitskalen ω −1 und τc dann vergleichbar sind.
Die Bewegungsgleichung des gedämpften eindimensionalen harmonischen Oszillators mit
äußerer Erregung f lautet
f
.
(5.14)
ẍ + ω02 x + γ ẋ =
m
Die Dämpfungskonstante γ hat die Dimension
[γ] = Zeit−1 .
Für die Zerfallszeit γ −1 ergibt sich
γ −1 =
m
m
≃
.
6πηR
RnFl τc kB T
Wir können die Temperatur durch die mittlere freie Weglänge
r
2kB T
ℓ = vτc =
τc
mFl
(5.15)
(5.16)
der Flüssigkeitsteilchen (Masse mFl ) und die Teilchenzahldichte durch den mittleren Abstand
−1/3
a = nFl
der Flüssigkeitsteilchen ausdrücken. Dies führt auf
γ −1 ≃
Falls a ≃ ℓ, so folgt
2mτc ℓ a3
.
mFl R ℓ3
(5.17)
2m ℓ
τc .
mFl R
(5.18)
γ −1 ≃
Da im Allgemeinen
m ≫ mFl ,
gilt
γ −1 ≫ τc .
(5.19)
Offensichtlich bricht die Reibungskraft fvis die Zeitumkehrinvarianz. Jede mikroskopische
Bewegungsgleichung muss natürlich zeitumkehrinvariant sein. In einer mikroskopischen Beschreibung würde die Hamiltonfunktion von der Form
Hmikro = H + HFl + HWW
(5.20)
sein, wobei HFl die Hamiltonfunktion der Flüssigkeit ist und HWW die Wechselwirkung zwischen
dem Teilchen der Masse m und der Flüssigkeit beschreibt.
Die Reibungskraft fvis beschreibt den mittleren Effekt der Flüssigkeit auf das Teilchen,
welches sich in ihr bewegt. Aufgrund der Reibung verliert der harmonische Oszillator Energie.
Diese fließt irreversibel in die Flüssigkeit. Man spricht von Dissipation und nennt fvis dissipative
Kraft.
H.W. Diehl
SS 2008
19
Dynamisches kritisches Verhalten. . .
5.3
Modenstruktur des gedämpften harmonischen Oszillators
Der Lösungsansatz ∝ e−iωt für die Gl. (5.14) führt zu der Gleichung
Deren Lösungen sind
−ω 2 + ω02 − iγω = 0 .
(5.21)
q
ω± = ± ω02 − γ 2 /4 − iγ/2 = ±ω1 − iγ/2 .
(5.22)
Wir können folgende Fallunterscheidung machen:
1. Der unterdämpfte Fall ω02 > γ 2 /4:
In diesem Fall ist ω1 ∈ R; es existieren oszillatorische Lösungen mit der Frequenz ω1 und
der Zerfallszeit τ = 2/γ.
2. Der überdämpfte Fall ω02 < γ 2 /4:
In diesem Fall ist ω1 ∈ iR; der Oszillator ist überdämpft, es existieren keine oszillatorischen
Lösungen.
Die beiden Lösungen e−iω± t liefern die folgenden beiden inversen Zerfallszeiten:
s
2
ω02 /γ 2 →0
γ
4ω
τf−1 =
1 + 1 − 20
−→
γ,
2
γ
τs−1 =
Falls
γ
1−
2
s
1−
4ω02
γ2
ω02 /γ 2 →0
−→
k
ω02
= .
γ
α
(5.23)
(5.24)
ω02 ≫ γ 2 /4 =⇒ τf ≪ τs .
Dies bedeutet, dass für Zeiten t & τf die schnelle Mode vernachlässigt werden kann, weil die
2
entsprechende Exponentialfunktion abgeklungen ist. Man erhält dann eine Lösung x ∼ e−ω0 t/γ .
Diese löst die Bewegungsgleichung
k
x=0.
(5.25)
−γ ẋ +
m
|{z}
=ω02
Wir sehen also, dass diese Näherung des Weglassens der schnellen Mode das Weglassen des
Trägheitsterms mẍ in der Bewegungsgleichung bedeutet. Als Ergebnis erhalten wir bei Anwesenheit einer äußeren Erregung die Gleichung
αẋ = −kx + f .
(5.26)
k
1
∂Htot
ẋ = − x + f = −λ
,
α
α
∂x
(5.27)
Man schreibt diese Gleichung auch in der Form
wobei wir λ = 1/α sowie
Htot = H − f x
eingeführt haben. Gleichungen dieser Art werden beispielsweise benutzt, um die Dynamik linearer Kettenmoleküle (Polymere) in einer Lösung zu beschreiben. In diesem Fall genügt die
Koordinate eines jeden Monomers einer solchen Gleichung, wobei allerdings H die Hamiltonfunktion für gekoppelte harmonische Oszillatoren bedeutet.
H.W. Diehl
SS 2008
20
Dynamisches kritisches Verhalten. . .
5.4
Responsefunktion des gedämpften harmomischen Oszillators
Wir kehren nun zur Bewegungsgleichung (5.14) des gedämpften harmonischen Oszillators zurück
und wollen dessen Responsefunktion χω bestimmen. Dazu betrachten wir eine äußere Erregung
der Form
f (t) = fω cos(ωt) = ℜ fω e−iωt .
(5.28)
Wir suchen komplexwertige Lösung für die in den Klammern von Gl. (5.28) stehende komplexe
Kraftfunktion. Dazu empfielt sich der Ansatz
x = A e−iωt .
Einsetzen in Gl. (5.28) und Auflösen nach A ergibt
A=
fω
1
.
2
m −ω + ω02 − iωγ
(5.29)
Daraus erhalten wir für die Antwortfunktion das Ergebnis
χω =
1
1
A
=
.
2
fω
m −ω + ω02 − iωγ
(5.30)
Wie man sieht, hat χω Pole an den komplexen Modenfrequenzen (5.22).
Eigenschaften der Responsefunktion:
i) Der Grenzfall ω → 0:
Im Falle einer statischen äußeren Kraft f ≡ f0 relaxiert das System in die neue Gleichgewichtslage
f0
xeq =
.
(5.31)
m
Dies ist im Einklang mit dem Limes ω → 0 der Responsefunktion:
lim χω =
ω→0
1
1
= .
2
mω0
k
(5.32)
ii) Der Grenzfall ω → ∞:
In diesem Grenzfall verhält sich χω asymptotisch wie
χω ≈ −
ω→∞
1
.
mω 2
(5.33)
iii) Für den Imaginärteil der Responsefunktion ergibt sich
ℑχω = χ′′ω =
H.W. Diehl
ωγ
1
.
m (ω 2 − ω02 )2 + ω 2γ 2
SS 2008
(5.34)
21
Dynamisches kritisches Verhalten. . .
Dies lässt sich nach Partialbruchzerlegung auch in der Form
1
1
1
′′
χω =
ℑ
−
2mω1
−ω + ω1 − iγ/2 −ω − ω1 − iγ/2
γ/2
γ/2
1
−
=
2mω1 (ω − ω1 )2 + (γ/2)2 (ω + ω1 )2 + (γ/2)2
γ→0
−→
=
π
[δ(ω − ω0 ) − δ(ω + ω0 )]
2mω0
π
sgn(ω) δ(ω 2 − ω02 ) .
m
(5.35)
iv) Wie man sieht, ist χ′′ω reell und ungerade in ω. Es hat die Form zweier Lorentzkurven bei
ω ≃ ±ω mit Breiten ≃ γ/2.
v) Für den Realteil χ′ ω erhält man
χ′ω =
1
ω02 − ω 2
.
m (ω 2 − ω02 )2 + ω 2 γ 2
(5.36)
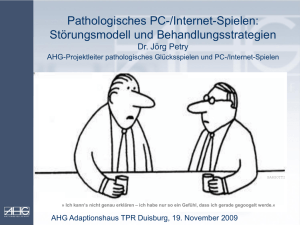
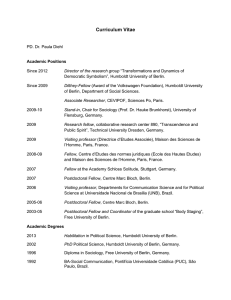
Real- und Imaginärteile von χω sind für die Werte γ/ω0 = 0, 1, 0, 5 und 2.0 in den Abb. 3–5
gezeigt.
10
χ′′ω
χ′ω
5
-2
1
-1
2
ω/ω0
-5
-10
Abbildung 3: Real- und Imaginärteil χ′ (ω) bzw. χ′′ω für γ/ω 0 = 0, 1.
Wie man sieht, ist
• χ′ω > 0 für |ω| < ω0 ,
H.W. Diehl
SS 2008
22
Dynamisches kritisches Verhalten. . .
2
χ′′ω
χ′ω
1
-2
1
-1
2
ω/ω0
-1
-2
Abbildung 4: Real- und Imaginärteil χ′ (ω) bzw. χ′′ω für γ/ω 0 = 0, 5.
• χ′ω = 0 für |ω| = ω0 und
• χ′ω < 0 für |ω| > ω0 .
Ferner gilt das asymptotische Verhalten
χ′ω
≈
ω→0
1
1 1
= .
2
m ω0
k
(5.37)
Als Lösung bei Anwesenheit der Kraft
erhalten wir
mit
f (t) = ℜfω e−iωt = fω cos(ωt)
(5.38)
x(t) = ℜ χω fω e−iωt = fω |χω | cos[ωt − ϕω ]
(5.39)
|χω | =
und
1
q
m
tan ϕω =
1
2
(5.40)
(ω 2 − ω02 ) + ω 2 γ 2
χ′′ω
ωγ
= 2
.
′
χω
ω − ω02
(5.41)
Die Amplitude ist bei |ω| = ω0 maximal. Die Phase ϕω geht bei ω = ±ω0 durch den Wert ±π/2
(s. Abb. 6).
Im überdämpften Grenzfall erhält man
χω ≈
H.W. Diehl
χstat
1
1
,
=
2
m ω0 − iωγ
1 − iωτs
SS 2008
(5.42)
23
Dynamisches kritisches Verhalten. . .
1.0
χ′ω
χ′′ω
0.5
-2
1
-1
2
ω/ω0
-0.5
Abbildung 5: Real- und Imaginärteil χ′ω bzw. χ′′ω für γ/ω 0 = 2.
ϕω
3
|χω |
2
1
-2
1
-1
2
ω/ω0
-1
-2
-3
Abbildung 6: Absolutbetrag |χω | und Phase ϕω für γ/ω 0 = 0.5.
H.W. Diehl
SS 2008
24
Dynamisches kritisches Verhalten. . .
χ′ω /ω
χstat τs
1.0
0.8
0.6
0.4
0.2
ωτs
-4
2
-2
4
Abbildung 7: χ′′ω /ω im überdämpften Fall.
wobei
χstat =
1
1
=
k
mω02
(5.43)
die statische Suszeptibilität ist. Die Größe χ′′ω /ω hat die Form einer Lorentzkurve der Breite
τs−1 = k/α = ω02/γ:
χ′′ω
τ −1
(5.44)
= χ 2 s −2 .
ω
ω + τs
H.W. Diehl
SS 2008
25
Dynamisches kritisches Verhalten. . .
6
Summenregeln und asymptotische Entwicklung von
Responsefunktionen
Aus unseren Ergebnissen
i
χAB (t) = θ(t) h[A(t), B]i ,
~
1
′′
h[A(t), B]i ,
χAB (t) =
2~
Z ∞
dω ′′
χ̃ (ω) e−iωt ,
=
−∞ 2π
(6.1)
(6.2)
(6.3)
für die Responsefunktion χAB und deren zugehörige Funktion χ′′AB (t) erhält man durch Übergang zum Limes t → 0 die Summenregel
Z ∞
dω ′′
1
χ̃ (ω) = h[A, B]i .
(6.4)
~
−∞ π
In Verbindung mit der Heisenbergschen Bewegungsgleichung erhält man analog
h[(i~d/dt)p A(t), B(0)]it→t′ = h[. . . [A(t), H0 ], H0 ] . . . ], B(0)]i
Z ∞
dω p ′′
p
= ~
ω χ̃AB (ω) .
−∞ π
(6.5)
Diese Momente von χ′′AB (ω)/ω treten als Entwicklungskoeffizienten der Laplacetransformierten
χ̂AB nach Potenzen von z −1 auf:
Z
dω χ̃′′AB (ω)
χ̂AB (z) =
π ω−z
∞
X
(p)
= −χ̂AB (0)
z −p ωAB ,
(6.6)
p=1
wobei
(p)
ωAB
=
Z
∞
−∞
dω χ̃′′AB (ω) p
ω
π
ω
Z
∞
−∞
dω χ̃′′AB (ω)
.
π
ω
(6.7)
Als Beispiel betrachten wir ein Vielteilchensystem von N identischen Teilchen der Masse m mit
einem Paarpotential U(r). Der Hamiltonoperator ist durch
N
1 X 2 X
p +
U(rj − rj ′ )
H0 =
2m j=1 j
′
(6.8)
j<j
gegeben. Als Observable wählen wir A = B = n(r), wobei
n(r) =
N
X
j=1
H.W. Diehl
δ(r − rj )
SS 2008
(6.9)
26
Dynamisches kritisches Verhalten. . .
der Dichteoperator ist. Der zugehörige Stromdichteoperator ist
N
1 X
[pj δ(r − rj ) + δ(r − rj ) pj ]
j(r) =
2m j=1
(6.10)
Wir führen die Fouriertransformierten dieser Größen durch
ñ(k) =
Z
d
−ir·k
d re
n(r) =
N
X
e−ik·rj
(6.11)
(6.12)
j=1
bzw.
j̃(k) =
=
Z
dd r e−ir·k j(r)
N
X
pj e−ik·rj + e−ik·rj pj
j=1
sowie
χ̃nn (k, ω) =
Z
′
dd r e−ik·(r−r ) χnn (r − r ′ , ω)
(6.13)
ein. Für den Kommutator [n(r), H0 ] ergibt sich
[n(r), H0 ] =
=
=
1 X
[n(r), p2j ]
2m j
1 X
pj
2m j
[n(r), pj ]
| {z }
+[n(r), pj ] pj
(−~/i)∇j δ(r−rj )=(~/i)∇δ(r−Rj )
~
∇ · j(r)
2mi
bzw.
[ñ(k), H0] = ~k · j̃(k) .
(6.14)
Für den Doppelkommutator [[n(r), H0 ], n(r ′ )] leitet man ohne Mühe das Ergebnis
[[n(r), H0 ], n(r ′ )]
~
=
[∇ · j(r), n(r ′ )]
2mi
~ X
{[pj · [∇δ(r − rj )] + [∇δ(r − rj )] · pj ′ , δ(r ′ − rj ′ )]}
=
2mi j,j ′
~ X
=
{[pj , δ(r ′ − rj ′ )] · ∇δ(r − rj ) + [∇δ(r − rj )] · [pj , δ(r ′ − rj ′ )]}
2mi ′
j,j
2
~ X
{(∇′ δ(r ′ − rj )) · ∇δ(r − rj ) + (∇δ(r − rj )) · ∇′ δ(r ′ − rj )}
=
2m j
=
H.W. Diehl
~2
[∇n(r)] · ∇′ δ(r − r ′ )
m
(6.15)
SS 2008
27
Dynamisches kritisches Verhalten. . .
ab.2
Fouriertransformiert bedeutet dies
[ñ(k), H0 ], ñ(k′ )] =
hnik 2
(2π)d δ(k + k′ )
{z
}
m |
mit hni =
N
.
V
(6.16)
=
ˆ V δk,−k ′
Wenn man dies in Gl. (6.5) für die Wahl p = 1 einsetzt, ergibt sich die sogenannte f -Summenregel
Z
∞
−∞
hni k 2
dω
ω χ̃′′nn (k, ω) =
.
π
m
(6.17)
Eine weitere wichtige Summenregel ist die Kompressibilitätsssummenregel. Diese ergibt sich
aus
Z ∞
dω χ̃′′nn (k, ω)
χ̂nn (k, 0) =
,
(6.18)
ω
−∞ π
der aus der Thermodynamik bekannten Beziehung
1 ∂hni 1 ∂V =
κT = −
V ∂P P,N
hni2 ∂µ T,N
(6.19)
für die isotherme Kompressibilität, wobei beim Übergang zur zweiten Gleichung die aus dP =
n dµ + s dT folgende Beziehung
∂ ∂ =
∂P T,N
hni∂µ T,N
(P = Druck = großkanonisches Potential/N, s = Entropie/N, µ = chemisches Potential) verwendet wurde, sowie
δhni(r)
= χ̂nn (r, r ′ ; 0) .
δµ(r ′ )
Aus diesen Gleichung folgt
lim χ̂(k, 0) = hni2 κT ,
k→0
(6.20)
so dass die Summenregel (Kompressibilitätsssummenregel)
lim
k→0
Z
∞
−∞
dω χ̃′′nn (k, ω)
= hni2 κT
π
ω
(6.21)
gilt.
2
Die Schreibweise in Gl. (7.6.46) von (Chaikin and Lubensky, 1995) ist wohl nicht richtig, weil dort ∇ auf
n(r) und δ(r − r ′ ) wirkt.
H.W. Diehl
SS 2008
28
Dynamisches kritisches Verhalten. . .
7
7.1
Memoryfunktionsformalismus
Memoryfunktionsformalismus am Beispiel einer einzigen Variablen
Das dynamische Verhalten von Vielteilchensystemen ist im Allgemeinen zu kompliziert, um
exakt behandelt zu werden. Exakte Ergebnisse sind normalerweise nur bei einfachen Modellen
möglich. In der Regel ist man daher auf Näherungen angewiesen. Bei der Wahl guter Näherungen ist es oft nötig, allgemeine strukturelle Eigenschaften (Konsequenzen von Erhaltungssätzen,
Summenformeln, Kausalitätseigenschaften usw.) zu kennen und zu berücksichtigen.
Im Folgenden wollen wir uns ein wenig mit dem sogenannten Memoryfunktionsformalismus
vertraut machen (Forster, 1975; Götze and Lücke, 1975). Dieser erlaubt einem, in formaler Weise
hydrodynamische — und darüber hinausgehende — Näherungen abzuleiten und deren Grenzen
einzuschätzen. Darüber hinaus erlaubt einem dieser Formalismus auch, statische Eigenschaften
(wie etwa statische Suszeptibilitäten) richtig in die Dynamik einzubauen. Dies ermöglicht es
einem dann, solche statische Eigenschaften ggf. aus Experimenten zu übernehmen.
Wir betrachten zunächst die Korrelationsfunktion
CAA (t, t′ ) = C(t − t′ ) = hA(t) A(t′ )i
(7.1)
einer reellen klassischen und nicht explizit zeitabhängigen Variablen A(t) ≡ A[q(t), p(t)] im
thermischen Gleichgewicht. Den Zusatz eq“ am Mittelwert h. . . ieq unterdrücken wir hier und
”
im Folgenden, wenn nichts anderes gesagt wird.
Aus der Form
2
(7.2)
i∂t C(t) = χ′′ (t)
β
des Fluktuations-Dissipations-Theorems (4.10) im t-Raum erhalten wir durch Laplacetransformation
Z ∞
dt i∂t C(t) eizt = z Ĉ(z) − i C(0)
0
2
=
β
Z
∞
1
C(0) = lim Ĉ(z) = Ĉ(i0) =
z→0+i0
β
Z
∞
2
=
β
=
1
β
Z
∞
′′
izt
dt χ (t) e
0
Z
∞
−∞
dt
0
Z
∞
−∞
dω ′′
χ̃ (ω) ei(z−ω)t
2π
′′
dω χ̃ (ω)
.
iπ ω − z
Die statische Korrelationsfunktion C(0) ist durch
−∞
dω χ̃′′ (ω)
π
ω
gegeben. Durch Auflösen nach Ĉ(z) erhalten wir daher
Z
χ̂(z) − χ̂(i0)
1
1
1 ∞ dω χ̃′′ (ω)
=
−
Ĉ(z) =
β −∞ iπ
z
ω−z ω
izβ
Z
1 ∞ dω χ̃′′ (ω)
.
=
β −∞ iπ ω(ω − z)
H.W. Diehl
SS 2008
(7.3)
(7.4)
29
Dynamisches kritisches Verhalten. . .
Wir werden mit Hilfe des zu entwickelnden Memoryfunktionsformalismus zeigen, dass Ĉ(z)
als
Ĉ(z) =
i
χ
χ
=
mit D̂(z) = Σ(z) + i Ω
z − Ω + i Σ(z) β
z + i D̂(z) β
i
(7.5)
geschrieben werden kann, das heißt, dass eine für ℑz 6= 0 holomorphe Funktion D̂(z) existiert,
so dass Gl. (7.5) gilt. Die Bedeutung dieses Ergebnisses sieht man, wenn man in den t-Raum
zurücktransformiert. Dort übersetzt sich das Resultat (7.5) in die Bewegungsgleichung
Z t
d
+ i Ω C(t) +
dτ Γ(t − τ ) C(τ ) = 0 (t > 0) ,
(7.6)
dt
0
wobei Σ(z) die Laplacetransformierte von Γ(t) ist.
ˆ ≡ Lp[f ](z)
Um dies einzusehen, muss man nur wissen, dass die Laplacetransformierte f(z)
einer Faltung
Z
t
f ∗ g(t) =
0
dt′ f (t − t′ ) g(t′ )
(7.7)
zweier Funktionen f und g das Produkt ihrer Laplacetransformierten ist (Übungsaufgabe!):
Lp[f ∗ g](z) = Lp[f ](z) Lp[g](z) = fˆ(z) ĝ(z) .
(7.8)
Die physikalische Interpretation von G. (7.6) liegt auf der Hand: Die zeitliche Änderung
von C(t) ist keine in der Zeit lokale Gleichung, denn sie hängt nicht nur von C(t) und ihrer
Ableitung Ċ(t) ab, sondern über die Gedächtnisfunktion Γ(t) von der Vorgeschichte im Intervall
(t, 0) ab.3
Bisher haben wir nur das FDT verwendet, um die Laplacetransformierte der Korrelationsfunktion Ĉ(z) durch die der Responsefunktion χ(t) auszudrücken. Um die Zeitabhängigkeit von
C(t) zu bestimmen, müssen wir die Bewegungsgleichung von A(t) bzw. C(t) lösen. Wir schreiben die Bewegungsgleichung als (H = klass. Hamiltonfunktion, {., .} = Poissonklammer (5.3))
d
A(t) = {A, H} = iL A(t)
dt
(7.9)
um, in dem wir den Liouvilleoperator L einführen. Für ein klassisches System von N identischen Teilchen der Masse m mit konservativer durch das Potential U(rj − rk ) beschriebenen
Paarwechselwirkungen gilt
N
X
X
∂
∂
pj
.
(7.10)
· ∇j −
∇U(rj − rk )
−
iL =
m
∂p
∂p
j
k
j=1
j>k
Die formale Lösung dieser Gleichung lässt sich in der Form
A(t) = eiLt A(0)
(7.11)
schreiben. Für C(t) erhalten wir daraus
C(t) = hA(t)A(0)i = hA(0)A(−t)i = hA(0) e−iLtA(0)i
≡ hA e−iLt Ai .
(7.12)
3
Man spricht allgemeiner von einer in t lokalen Bewegungsgleichung, wenn in dieser neben C(t) nur Ableitungen C (k) (t) = dk C(t)/dtk bis zu einer endlichen Ordnung k vorkommen. Dies ist nur dann der Fall, wenn
Γ(t) nur Distributionen der Form δ(t − 0) und entsprechende Ableitungen enthält.
H.W. Diehl
SS 2008
30
Dynamisches kritisches Verhalten. . .
Vereinbarungsgemäß lassen wir das Argument (0) bei A(0) weg. Für die Laplacetransformierte
dieser Größe folgt
i
Ĉ(z) = hA
Ai .
(7.13)
z−L
Dabei ist i/(z − L) selbstverständlich als Operatorinverses i(z − L)−1 zu interpretieren.
Wir definieren nun mit Hilfe von Erwartungswerten von Produkten von Observablen zur
selben Zeit ein Skalarprodukt. Dabei lassen wir auch komplexwertige Observablen zu:
Def.: Skalarprodukt“:
”
hA|Bi ≡ hA∗ Bi .
(7.14)
Die so definierte Abbildung (A, B) 7→ hA|Bi hat offensichtlich die Eigenschaften eines Skalarproduktes, denn sie hat die folgenden Eigenschaften
(i)
hA|Ai ≥ 0 ,
(ii)
hA|α1 B1 + α2 B2 i = α1 hA|B1 i + α2 hA|B2 i ,
(iii)
hA|Bi∗ = hA∗ Bi∗ = hAB ∗ i = hB|Ai .
Man würde zweifellos auch gerne sicherstellen, dass der Raum der Observablen mit diesem
Skalarprodukt auch separabel und vollständig ist. Als Physiker stellen wir uns auf den pragmatischen Standpunkt, dass dies (hoffentlich) der Fall sein wird, obwohl dies nicht notwendigerweise
nachweisbar ist.
Man überzeugt sich leicht davon, dass der Liouvilleoperator L selbstadjungiert ist:
d iLt ∗ d
∗
hLA|Bi = h(LA) Bi = i
h(e A) Bi = i hA(t)|Bi
dt
dt
t=0
t=0
d
d
= i hA|B(−t)i = i hA|e−iLt Bi = hA|LBi .
dt
dt
t=0
t=0
Wir lesen nun Gl. (7.11) wie folgt: Der Operator e−iLt dreht“ den Zustandsvektor“ |Ai. Die
”
”
Korrelationsfunktion C(t) entspricht der Projetkion dieses gedrehten Vektors auf |Ai. Dies legt
es nahe, Projektoren P und Q durch
P =
|AihA|
= 11 − Q
hA|Ai
(7.15)
einführen. Diese Definitionen bedeuten, dass
hA1 |P |A2i = hA∗1 AihA∗ Ai−1 hA∗ A2 i
(7.16)
für beliebige Observablen A1 und A2 ist. Offensichtlich sind P und Q in der Tat Projektoren,
denn es gelten die Identitäten
P2 = P ,
P Q = QP = 0 ,
H.W. Diehl
SS 2008
(7.17)
(7.18)
31
Dynamisches kritisches Verhalten. . .
und
Q2 = Q .
(7.19)
Wir zerlegen nun den Liouvilleoperator
L = LP + LQ
(7.20)
in einen Anteil, der |Ai nur proportional zu sich verändert, und einen Rest LQ. Zur Umformung
von Gl. (7.12) verwenden wir die algebraische Operatoridentität
(X + Y )−1 = X −1 − X −1 Y (X + Y )−1 ,
(7.21)
deren Gültigkeit man leicht durch Multiplikationen mit X + Y von rechts und mit X von links
beweist.
Durch Anwendung dieser Gleichungen auf die Laplacetransfomierte (7.13) erhalten wir
Ĉ(z) = hA|
1
i
i
|Ai + hA|
LQ
|Ai .
z − LQ
z − LQ
z−L
(7.22)
Der erste Beitrag auf der rechten Seite ergibt
hA|
i
i
i
|Ai = hA|Ai = C(t = 0)
z − LQ
z
z
(7.23)
Dies folgt aus Q|Ai = 0, wie man durch Entwicklung nach LQ sieht. Folglich erhalten wir:
Ĉ(z) =
Ĉ(z)
11
i
C(0) + hA|
L|Ai
.
z
z − LQ
C(0)
(7.24)
Der im zweiten Summanden auftretende Ausdruck lässt sich nach Multiplikation mit z als
z
L|Ai = [Ω − iΣ(z)]C(0)
(7.25)
hA|
z − LQ
mit
und
Ω = hA|L|Ai/C(0)
(7.26)
i
L|Ai/C(0)
(7.27)
z − LQ
schreiben. Da βC(0) = χ ist, ist dies das angekündigte Ergebnis (7.5). Diese Ergebnisse lassen
sich umformen zu
Z ∞
dω ′′
χ̃ (ω)
(7.28)
χΩ = iβhȦ|Ai =
−∞ π
und
i
χΣ(z) ≡ σ(z) = βhȦ|Q
Q|Ȧi .
(7.29)
z − QLQ
Sie wurden zuerst von Mori (1965) in dieser Form angegeben.
In dem von uns hier zunächst betrachteten Fall einer einzigen Variablen A verschwindet die
Frequenz Ω in der Regel, und zwar immer dann, wenn A eine eindeutige Signatur bezüglich
Zeitumkehr hat. Falls ΘAΘ−1 = ǫA A, dann folgt hȦ|Ai = −ǫ2A hȦ|Ai = 0 und damit Ω = 0.
Das entscheidende Objekt in unserem Ergebnis ist daher die Gedächtnisfunktion Σ(z). Gleichung (7.29) zeigt, dass diese selber die Struktur einer Korrelationsfunktion hat, in die nur der
aus |Ȧi herausprojizierte Anteil Q|Ȧi und der Anteil QLQ des Liouvilleoperators eingehen.
Σ(z) = hA|LQ
H.W. Diehl
SS 2008
32
Dynamisches kritisches Verhalten. . .
7.2
Memoryfunktionsmatrizen
Die im vorangegangenen Unterkapitel hergeleiteten Gleichungen sind dann besonders nützlich,
wenn die Memoryfunktion Σ(z) sich als eine einfachere Größe als Ĉ(z) herausstellt, für die man
einfache Näherungen machen kann. Beispielsweise erhält man für χ̃′′ (ω)/ω eine Lorentz-Kurve,
wenn Σ(z) im Wesentlichen konstant ist.
Oftmals kann man sich aber nicht auf eine einzige Variable A beschränken, weil mehrere
dynamische Variablen Aj dynamisch gekoppelt sind. (Ein bekanntes Beispiel ist das der Lichtsteuerung, an normalen Flüssigkeiten. Dort treten neben einem zentralen Rayleigh-Peak“ in
”
C̃nn (k, ω) bei ≃ 0 auch zwei symmetrisch verschobene Brillouin-Peaks “ bei ω ≃ ±CSk auf,
”
die von Schallwellen verursacht werden. Alle drei Linien sind näherungsweise Lorentz-Kurven.4
Es liegt daher nahe, den Memoryfunktionsformalismus auf den Fall mehrerer gekoppelter dynamischer Variablen zu verallgemeinern.
Es seien Aj (t), j = 1, . . . N, linear unabhängige, klassische dynamische Variablen, für die wir
ohne Beschränkung der Allgemeinheit voraussetzen, dass ihre Mittelwerte hAj i verschwindet.5
Wir betrachten die Korrelationsfunktionen
′
Cjj ′ (t − t′ ) = hAj (t) Aj ′ (t′ )i = hAj |e−iL (t−t ) |Aj ′ i .
(7.30)
Für die Laplace-transformierten Ĉjj ′ (z) dieser Korrelationsfunktionen erhalten wir als Verallgemeinerung von Gl. (7.4):
Z ∞
dω χ̃′′jj ′ (ω)/β
i
|Aj ′ i =
.
(7.31)
Ĉjj ′ (z) = hAj |
z−L
−∞ πi ω(ω − z)
Die statische Suszeptibilitätsmatrix
χjj ′ =
Z
∞
−∞
dω χ̃′′jj ′ (ω)
= β hAj |Aj ′ i
π
ω
(7.32)
ist positiv definit und hat daher eine wohldefinierte Inverse, deren Elemente wir mit χ−1
jj ′ bezeichnen. Somit gilt also
X
(7.33)
χjl χ−1
lj ′ = δjj ′ .
l
Als Matrixverallgemeinerungen unserer früheren Gleichungen erhalten wir
[z δjl − Ωjl + i Σjl (z)] Ĉlj ′ (z) = i χjj ′ /β
(7.34)
mit
Ωjj ′ = ωjl χ−1
lj ′
und Σjj ′ (z) = σjl χ−1
lj ′ ,
ωjj ′ = iβhȦj |Aj ′ i =
σjj ′ = βhȦj |Q
Z
∞
−∞
dω ′′
χ̃ ′ (ω) ,
π jj
i
|Ȧj ′ i ,
z − QLQ
(7.35)
4
Nach Hendrik Antoon Lorentz; in der Mathematik nennt man die Lorentz-Verteilung auch CauchyVerteilung.
5
Falls dies nicht der Fall ist, kann man stattdessen die Variablen δAj = Aj − hAj i betrachen.
H.W. Diehl
SS 2008
33
Dynamisches kritisches Verhalten. . .
wobei die Summenkonvention gilt. Die zu σjj ′ (z) gehörende Spektralmatrix γjj ′ (ω), durch die
es als
Z
dω γjj ′ (ω)
(7.36)
σjj ′ (z) =
2πi ω − z
dargestellt werden kann, ist durch
Z ∞
γjj ′ (z) = β
(7.37)
dt eiωt hȦj |Qe−iQLQtQ|Ȧj ′ i
−∞
gegeben.
7.3
Erweiterung auf die Quantenmechanik
Bisher haben wir klassische Systeme betrachtet, sofern nichts anderes gesagt wurde. Um zu
sehen, ob und wie die obigen Gleichungen auf die Quantenmechanik übertragen werden können,
müssen wir uns als erstes überlegen, wie der Liouville-Operator quantenmechanisch zu verstehen
ist. Die Heisenbergsche Bewegungsgleichung
d
1
Aj (t) = [Aj (t), H0 ] ≡ iLA(t)
dt
i~
(7.38)
zeigt uns, dass iL eine lineare Abbildung zwischen A(t) und Ȧ(t) definiert. In einer Matrixdarstellung bezüglich eines vollständig orthonormalen Systems |ni bedeutet dies
1
d
Ann′ (t) = [Anm (t)H0,mn′ − H0,nm Amn′ (t)] .
dt
i~
(7.39)
Infolgedessen gilt für die Matrixdarstellung von L:
~Lnm,nm′ = H0,nm δmn′ − H0,mn′ δmn .
(7.40)
Angenommen der Hilbertraum H, in dem die Operatoren Aj wirken habe die Dimension
dim H < ∞. Dann ist die Dimension des Raumes, in dem L wirkt, (dim H)2 .
Der zeitabhängige Operator A(t) kann dann in den alternativen beiden Formen
A(t) = eiH0 t/~A(0)e−iH0 t/~ = eiLt A(0)
(7.41)
geschrieben werden.
Wir müssen außerdem noch klären, was in der Quantenmechanik an die Stelle des über
Erwartungswerte definierten Skalarproduktes (7.14) tritt. Eine naheliegende Möglichkeit wäre
die Definition
hA|Bi ≡= hA† Bi .
(7.42)
Wir werden allerdings eine andere, vorteilhaftere Definition verwenden, nämlich
Z β
dλ †
hA|Bi ≡=
hA B(i~λ)icum ,
β
0
(7.43)
wobei
B(i~λ) = e−λH0 B eλH0 ,
H.W. Diehl
SS 2008
(7.44)
34
Dynamisches kritisches Verhalten. . .
im Einklang mit früheren Definitionen. Der Vorteil dieser Definition besteht darin, dass die in
Gl. (4.12) definierte Korrelationsfunktion ΦAB (t), welche der klassischen Form (4.11) des FDTs
genügt, als
ΦAB (t) = hA|Bi = hA|e−iLt|Bi
(7.45)
geschrieben werden kann. Infolgedessen übertragen sich vom klassischen Fall bekannten Gleichungen auf den quantenmechanischen, wenn man die Funktionen Cjj ′ (t) sich durch deren
quantenmechanische Analoga Φj,j ′ (t) ersetzt denkt.
7.4
Kurze Erinnerung an das Problem der Spindiffusion
Im Hauptteil dieses Kapitels haben wir gezeigt, dass sich die Laplacetransformierte der Korrelationsfunktion CAA in der Form (7.5) darstellen lässt. Für die Frequenz Ω und die Memoryfunktion Σ(z) erhielten wir die Ergebnisse (7.28) beziehungsweise (7.29). Wenn A(t) eine
erhaltene Dichte n(x, t) ist — für die also eine Kontinuitätsgleichung gilt —, so lässt sich deren
Fouriertransformierte
Z
nk = dd x n(x) e−ik·x
(7.46)
als
ṅk(t) = ik · jk(t)
(7.47)
schreiben. Infolgedessen erhält man für die Fourier-Laplace-Transformierte Ĉ(k, z) der Korrelationsfunktion Cnn (x, t) das Resultat
Ĉnn (k, z) =
z+
ik 2
i
χ(k)
.
D(k, z) β
(7.48)
Falls sich die Memoryfunktion D(k, z) im Grenzfall z, k → 0 nicht-singulär verhält und einen
nicht-verschwindenden Grenzwert D(0, 0) hat, so hat die analytische Fortsetzung von Ĉnn (k, z)
einen Pol (auf dem zweiten Riemannschen Blatt) bei
z = −ik 2 D(0, 0) + o(k 2 ) .
Falls man D(k, z) durch eine Konstante D ≡ D(0, 0) ersetzen darf, dann reduziert sich Ĉnn (k, z)
auf das von der Diffusionsnäherung her bekannte Ergebnis. Wir sehen also, dass die Diffusionsnäherung unmittelbar mit dem Verhalten von D(k, z) für k, z → 0 zu tun hat.
Um dies weiter zu untersuchen, sei zunächst darauf hingewiesen, dass D(k, z) für gegebenes
beliebiges k = kα eα 6= 0 (wobei {eα } eine euklidische Basis ist) in der Form
D(k, z) = χ−1 (k) ǩα dαβ (k, z) ǩβ
(7.49)
mit
i
Q|jk,β i
(7.50)
z − QLQ
geschrieben werden kann. Da die Stromdichte ein lokaler Operator ist, erwartet man, dass ihre
Korrelationsfunktion abseits von kritischen Punkten als Funktion des Abstandes schnell zerfällt.
Da χ(k) ebenfalls einen endlichen Grenzwert für k → 0 haben sollte (sofern man nicht an einem
kritischen Punkt ist), sollte dαβ (k, z) einen nicht-singulären Grenzwert für k → 0 haben. Da
der einzige k-unabhänbgige Tensor (in α und β symmetrische) Tensor ∝ dαβ ist, muss
dαβ (k, z) = β hjk,α |Q
lim dαβ (k, z) = dˆ1 (z)
k→0
H.W. Diehl
SS 2008
(7.51)
35
Dynamisches kritisches Verhalten. . .
gelten, wobei
Da
1
i
dˆ1 (z) = β lim hjk,α |Q
Q|jk,α i .
d k→0
z − QLQ
lim Ĉ(k, z) =
k→0
iχ
βz
(7.52)
(7.53)
bei z = 0 einen Diffusionspol hat, verhält es sich bei z = 0 nicht analytisch. Dagegen dürfen
wir von d(z) bei z = 0 durchaus analytisches Verhalten erwarten (sofern wir weg von kritischen
Punkten bleiben). Es genügt zu wissen, dass ihre Fourier-Rücktransformierte in den t-Raum für
gross t beschränkt bleibt. Eine Funktion f (t), die für t → ∞ wie e−γt mit γ > 0 zerfällt, kann
von der oberen komplexen Halbebene in einen die reelle Achse umfassenden Streifen der Breite
γ der unteren komplexen Halbebene fortgesetzt werden. Dies bedeutet insbesondere, dass fˆ(z)
an z = 0 analytisch ist.
Es ist plausibel, dass die Laplace-Rücktransformierte d1 (t) von dˆ1 (z) diese Eigenschaft hat.
Für sie ergibt sich aus Gl. (7.50) der Ausdruck
1
d1 (t) = lim hjk,α|Q e−iQLQt|jk,α i .
k→0 d
1
Dχ =
lim
dkB T k→0
Z
0
(7.54)
∞
dt hjk,α |Q e−iQLQtQ|jk,α i .
Man kann dieses Ergebnis in einen Doppellimes umformen:
Z ∞
1
Dχ =
lim lim
dt e−ǫt hjk,α |e−iLt|jk,α i
ǫ→0+
k→0
dkB T
0
(7.55)
(7.56)
(Übungsaufgabe). Der Konvergenz erzeugende Faktor e−ǫt stellt die Existenz des Integrals sicher. Bei diesem Ausdruck ist die Reihenfolge der Limites wichtig.
H.W. Diehl
SS 2008
36
Dynamisches kritisches Verhalten. . .
8
Brownsche Bewegung als Anwendung des Memoryfunktionsformalismus
Im Jahre 1829 untersuchte der Botaniker Robert Brown eine Suspension von in Wasser verteilten Pflanzenpollen unter dem Mikroskop. Er beobachtete, dass die Pollen eine unregelmässige
schwankende Bewegung ausführten. Sie wird seitdem Brownsche Bewegung genannt. Ursprünglich dachte man, dass diese Brownsche Bewegung nur bei biologischen Systemen auftreten würde
und Ausdruck einer mysteriösen Lebenskraft“ sei. Man stellte aber bald fest, dass auch die
”
Teilchen einer Tintensuspension eine solche Bewegung ausführten.
Ursächlich für die Brownsche Bewegung ist die Wechselwirkung der suspendierten Teilchen mit der Trägerflüssigkeit (hier: Wasser) und die thermische Bewegung ihrer Teilchen. Die
Theorie der Brownsche Bewegung wurde zuerst von Einstein und Smoluchowski entwickelt und
später von Langevin u. a. vervollständigt. Wir wollen im Folgenden die Anwendung des Memoryfunktionsformalismus am Beispiel der Brownschen Bewegung illustrieren. Dabei kommt
es uns darauf an, eine möglichst einfache, aber nicht triviale Anwendung des Formalismus zu
erläutern. Daher verzichten wir auf eine umfassende Darstellung der Theorie der Brownschen
Bewegung.
Wir betrachen ein schweres Brownsches Teilchen, welches sich mit der Geschwindigkeit
v in einer stationären Trägerflüssigkeit von leichten Teilchen bewegt. Die Erfahrung zeigt,
dass das Brownsche Teilchen einer durch die Trägerflüssigkeit verursachten Reibungskraft −ζv
ausgesetzt ist, wobei ζ der Reibungskoeffizient ist. Infolgedessen liegt es nahe zu vermuten, dass
das Brownsche Teilchen der Bewegungsgleichung
v̇(d) + ζ v(d) = 0
(8.1)
v(d) = e−ζt v(0) .
(8.2)
genügt. Diese hat die Lösung
Falls das Brownsche Teilchen im thermischen Gleichgewicht mit der Flüssigkeit ist, so wird
seine Geschwindigkeit im Mittel Null sein. Andererseits wird die Geschwindigkeit um diesen
Mittelwert herum schwanken, so dass v 2 einen von Null verschiedenen Mittelwert hat, für den
wir in d Dimensionen mittels des Äquipartitionstheorems das Ergebnis
hv 2 i =
2 d
kB T
M 2
(8.3)
erhalten, wobei M die Masse des B-Teilchens ist.
Wenn man beide Gleichungen (8.2) und (8.3) naiv miteinander kombiniert, so findet man,
dass spontane Geschwindigkeitsfluktuationen gemäß
hv(t) · v(0)i = e−ζt hv(0) · v(0)i = e−ζt d kB T /M
(8.4)
zerfallen. Dieses Ergebnis ist auf hinreichend langen Zeitskalen richtig, obwohl unsere Ableitung
zu Kritik Anlass gibt.
Gleichung (8.1) kann offensichtlich mikroskopisch nicht richtig sein, sondern nur im Mittel
stimmen. Denn die Ursache für die Reibungskraft sind die ständigen Stöße des B-Teilchens
mit den Flüssigkeitsmolekülen. Nur auf Zeitskalen, die groß gegenüber der typischen Zeitkala
für einen Einzelstoß sind, kann die Beschreibung der Wechselwirkung zwischen B-Teilchen und
Flüssigkeit durch eine Reibungskraft zutreffen. Der Grund dafür, dass eine solche Beschreibung
H.W. Diehl
SS 2008
37
Dynamisches kritisches Verhalten. . .
überhaupt im Langzeitlimes richtig sein kann, besteht in der größeren Masse des B-Teilchens.
Wenn M sehr groß ist im Vergleich zur Masse M der Flüssigkeitsmoleküle, so tritt eine Trennung von Zeitskalen auf. Diese ist Voraussetzung dafür, dass der Memoryfunktionsformalismus
angewendet werden kann.
Um die Theorie der Brownschen Bewegung aus der mikroskopischen Dynamik herzuleiten, wollen wir vereinfachend annehmen, dass sowohl die Flüssigkeitsteilchen, als auch das
Brownsche Teilchen als Massenpunkte beschrieben werden können. Die Wechselwirkungen der
Flüssigkeitsteilchen untereinander und des B-Teilchens mit dieser können dann durch isotrope
Paarpotentiale beschrieben werden. Wir gehen daher von einer Hamilton-Funktion der Form
N
N
X
X
X
p2j
p20
V (rjl ) +
+
+
U(r0j ) ,
H=
2m j>l
2M
j=1
j=1
(8.5)
wobei rjl ≡ |rjl| mit rjl = rj − rl . Dabei haben wir dem B-Teilchen die Nummer 0 gegeben.
Für den zugehörigen Liouvilleoperator erhalten wir
L = LFl + δL ,
wobei
iLFl =
(8.6)
N
X
pj
j=1
X
∂
∇V (rjl )
−
·
m ∂r j j>l
∂
∂
−
∂pj
∂pl
(8.7)
der Liouvilleoperator der Flüssigkeit ist, während
n
X
p0 ∂
∂
∂
i δL =
·
−
∇U(r0j )
−
M ∂r0 j=1
∂p0 ∂pj
(8.8)
die Beiträge des B-Teilchens und seiner Wechselwirkungen mit der Flüssigkeit enthält.
Wir wollen dieses System hier rein klassisch behandeln. Dazu betrachten wir die Impulskorrelationsfunktionen
Cαβ (t) = hp0,α (t) p0,β (0)i = hp0,α |e−iLt |p0,β i .
(8.9)
Die Mittelung erfolgt dabei über eine Gesamtheit, bei der das B-Teilchen im Gleichgewicht mit
der Trägerflüssigkeit ist. Aus Symmetriegründen gilt
Cαβ (t) = δαβ C(t) .
(8.10)
Ferner erhalten wir aus dem Äquipartitionstheorem die statische Suszeptibilität
χαβ = β −1 Cαβ (0) = Mδαβ .
(8.11)
Das Matrixgegenstück der früher mit γ(t) bezeichneten Memoryfunktion ist ebenfalls isotrop
und durch
1
hṗ0,α |Q e−iQLQtQ|ṗ0,β i = γ(t) δαβ
(8.12)
γαβ (t) =
kB T
gegeben, wobei Q nun den Projektor
Q=1−P =1−
H.W. Diehl
X
α
|p0,α i
SS 2008
1
hp0,α |
MkB T
(8.13)
38
Dynamisches kritisches Verhalten. . .
bedeutet. Da hṗ0,α p0,β i = 0 aufgrund von Zeitumkehrinvarianz, verschwindet die durch Gleichung (7.35) gegebene Frequenzmatrix ωαβ .
Bei der Definition der Laplacetransformierten γ(t) spalten wir einen Faktor 1/m ab:
Z
1 ∞
σ(z) =
dt eizt γ(t) .
(8.14)
m 0
Für die Laplacetransformierte Ĉ(z) der Korrelationsfunktion C(t) erhalten wir dann
Ĉ(z) =
i
z−i
m
M
σ(z)
MkB T .
(8.15)
Durch Vergleich mit dem bei der Spindiffusion erhaltenen Ergebnis sieht man, dass die Rolle
des dort auftretenden Faktors k 2 in der hydrodynamischen Mode nun durch das Massenverhältnis m/M gespielt wird. Für ein unendlich schweres B-Teilchen verschwindet das Verhältnis
m/M, so dass Ĉ(z) dann einen Pol bei z = 0 hat. Das Auftreten dieses Pols bedeutet, dass sich
ein unendlich schweres B-Teilchen nicht bewegt, so dass p0 (t) zeitunabhängig wird:
C(t) = const, bzw. Ĉ(z) = const ×
i
z
für m/M → 0 .
(8.16)
Bei endlichem Massenverhältnis m/M wandert dieser Pol in die untere komplexe Halbebene.
In niedrigster Ordnung von m/M ist seine Lage durch
m
m
z = −i
σ(z) ≃ −i
lim σ(0) ≡ −iζ
(8.17)
M
M m/M →0
gegeben, sofern σ(z) sich in der Nähe von z = 0 auch im Limes m/M → 0 gutartig verhält,
also dort keinen Pol hat. (Es sei daran erinnert, dass dies auf Ĉ(z) nicht zutrifft.)
Unter den erwähnten Voraussetzungen erhalten wir für betraglich kleine Werte von z das
Ergebnis
iMkBT
Ĉ(z) =
bzw. C(t) = MkB T e−ζt ,
(8.18)
z + iζ
wobei die zweite Gleichung entsprechend für lange Zeiten gilt.
Da v = p/M ist, entspricht dieses Resultat unserem früher in Gl. (8.4) angegebenen für die
Geschwindigkeits-Geschwindigkeits-Korrelation. Aus der allgemeinen Form (7.35) kann man ablesen, dass ζ reell und positiv sein muss. Damit haben wir das Problem der Gültigkeit der phänomenologischen Gleichung (8.4) auf die Frage reduziert, ob sich σ(z) auch im Limes m/M → 0
gutartig bei z = 0 verhält. Um dies zu überprüfen, müssen wir das Frequenzspektrum von σ(z)
bzw. die Relaxationszeiten von γ(t) untersuchen.
Dazu spalten wir den Liouville-Operators
L = L0 + LB + LB→Fl
in einen Anteil
L0 ≡ LFl + LFl→B = LFl − i
X
j
∇U(r0j ) ·
(8.19)
∂
,
∂pj
(8.20)
welcher neben dem Liouville-Operator der reinen Flüssigkeit auch die Wirkung des B-Teilchens
auf die Flüssigkeit enthält, einen Beitrag
X
∂
,
(8.21)
LB→Fl = i
∇U(r0j ) ·
∂p0
j
H.W. Diehl
SS 2008
39
Dynamisches kritisches Verhalten. . .
der die Wirkung der Flüssigkeit auf das B-Teilchen enthält, sowie einen ein sich frei bewegendes
B-Teilchen beschreibenden Rest
p0 ∂
·
(8.22)
LB = −i
M ∂r0
auf.
Wir können die relative Ordnung dieser Beiträge mit Hilfe des Äquipartitionstheorems
abschätzen. Da für jede feste Vektorkomponente α
hp20,α i = MkB T
und hp2j,αi = mkB T
(8.23)
p
gelten, ist pj /p0 von der Ordnung m/M . Infolgedessen sind auch LFl→B und LB um einen
Faktor (m/M)1/2 kleiner als L0 . Mit anderen Worten, es gilt
r
m
LB + LB→Fl
∼
.
(8.24)
L0
M
Das heißt insbesondere, dass
L → L0 für m/M → 0 .
(8.25)
Aus der Tatsache, dass L0 nicht auf die Koordinaten des B-Teilchens wirkt, folgt, dass
L0 |p0 i = 0 bzw.
L0 P = 0 oder L0 = L0 Q .
(8.26)
Infolgedessen lässt sich die Funktion γ(t) in Gl. (8.12) im Limes M → ∞ als
lim γ(t) ≡ γ∞ (t) =
M →∞
1
hṗ|e−iL0 t |ṗ0 i ,
dkB T
(8.27)
wobei wir davon Gebrauch gemacht haben, dass hṗ0 |p0 i = 0 und daher hṗ0 |Q = hṗ0 |. Da ferner
|ṗ0 i = iL|p0 i = −
N
X
j=1
∇U(r0j ) ≡ F
(8.28)
die Gesamtkraft der Flüssigkeitsteilchen auf das B-Teilchen ist, können wir die Grenzfunktion
γ∞ als Kraft-Korrelationsfunktion schreiben:
γ∞ (t) =
1
hF∞ (t) · F∞ (0)i ,
dmkB T
(8.29)
wobei die Zeitabhängigkeit von F∞ (t) ausschließlich durch L0 gegeben ist. Dies bedeutet, dass
F∞ (t) diejenige Kraft ist, die die Trägerflüssigkeit auf ein unendlich schweres B-Teilchen ausübt.
In diesem Grenzfall enthält γ∞ (t) ausschließlich mikroskopisch schnell zerfallende Prozesse,
die für die innere Bewegung der leichten Teilchen der Trägerflüssigkeit in Anwesenheit eines
räumlich festgehaltenen B-Teilchens charakteristisch sind. Da γ∞ (t) schnell zerfällt, wird die
Laplacetransformierte m σ(z) bei z = 0 analytisch in z sein. Insgesamt haben wir gezeigt, dass
die Geschwindigkeitskorrelationen eines schweren B-Teilchens exponentiell in irreversibler Weise
zerfallen, wobei der Reibungskoeffizient ζ von der Ordnung des Massenverhältnisses m/M und
durch
m
ζ∞ + O (m/M)2
(8.30)
ζ=
M
H.W. Diehl
SS 2008
40
Dynamisches kritisches Verhalten. . .
mit
ζ∞
1
=
dmkB T
Z
0
∞
dt hF∞ (t) · F∞ (0)i
(8.31)
gegeben ist.
Diese Gleichung wurde zuerst von Kirkwood (1945) in anderer Weise hergeleitet. Ihre Bedeutung für praktische Rechnungen liegt auf der Hand: Um ζ∞ zu berechnen, muss man die
Newtonschen Bewegungsgleichungen der Flüssigkeitsteilchen in Anwesenheit eines festen Kraftzentrums (B-Teilchen) untersuchen. Die entsprechende Hamilton-Funktion ist durch Gl. (8.5)
gegeben, wenn der Beitrag p20 /2M weggelassen wird. Solche Rechnungen kann man numerisch mit Hilfe der Molekulardynamik für eine hinreichend große Zahl von Flüssigkeitsteilchen
durchführen. Um die Gleichgewichtskorrelationsfunktion γ∞ (t) zu bestimmen, müsste man im
Prinzip die Newtonschen Bewegungsgleichungen für beliebige Anfangsbedingungen lösen und
dann über diese mitteln. Bei ergodischen Systemen kann man γ∞ (t) auch dadurch berechnen,
dass man ein Zeitmittel über eine gegebene Phasenraumtrajektorie durchführt. Dies bedeutet,
dass diese Größe durch
Z T0
1
1
dτ F∞ (t + τ ) · F∞ (τ )
(8.32)
γ∞ (t) =
dkB T T0 0
berechnet wird, wobei das Zeitintervall T0 so groß gewählt werden muss, dass das Integral
unabhängig von T0 wird. Durch Integration dieser Funktion über t ergibt sich dann ζ∞ .
H.W. Diehl
SS 2008
41
Dynamisches kritisches Verhalten. . .
9
Allgemeine Eigenschaften von Modellen der kritischen
Gleichgewichtsdynamik
Wir wollen uns im Folgenden mit einigen wichtigen allgemeinen Eigenschaften vertraut machen, die von geeigneten Modellen der kritischen Dynamik in der Nähe des thermodynamischen Gleichgewichts (kurz: Modelle der kritischen Gleichgewichtsdynamik“) zu fordern sind
”
(Hohenberg and Halperin, 1977). Wir beschränken uns dabei hier auf Fälle, bei denen eine
Modellierung im Rahmen der klassischen Physik ausreichend ist. Dies setzt im Wesentlichen
voraus, dass typische Anregungsenergien ~ω in der Nähe der kritschen Temperatur Tc klein im
Vergleich zur thermischen Energie kB Tc sein müssen. Das heißt, es muss
~ω
≪ 1 für T ≃ Tc
kB Tc
(9.1)
gelten.
Da die charakteristischen Frequenzen an Tc gegen Null gehen, ist diese Bedingung mit
Ausnahme von Phasenübergängen in der Nähe des absoluten Nullpunktes üblicherweise erfüllt.
9.1
Mikroskopische Modelle
Wir betrachten ein klassisches physikalisches System, dessen Zustand zu jedem Zeitpunkt durch
einen Satz von reellwertigen klassischen Variablen {Qµ } beschrieben wird. Als Observablen sind
diese Größen Phasenraumfunktionen, das heißt, es gilt
Qµ = Fµ (q, p) ,
wobei wir angenommen haben, dass sie nicht explizit von der Zeit abhängen.
Wir denken uns die klassische Hamilton-Funktion H durch diese Variablen ausgedrückt und
nehmen an, dass H parametrisch von einem Satz angewandter Feldern“ {hµ } ≡ h abhängt.
”
Die Hamilton-Funktion hat dann die Form
X
H[Q; h] = H0 [Q] −
hµ Qµ .
(9.2)
µ
Falls die Variablen Q ≡ {Qµ } vollständig sind, genügen sie den mikroskopischen Bewegungsgleichungen
∂Qµ ∂H ∂Qµ′
∂Qµ ∂H ∂Qµ′
Q̇µ = {Qµ , H} =
−
∂qλ ∂Qµ′ ∂pλ
∂pλ ∂Qµ′ ∂qλ
∂H
∂Qµ ∂Qµ′
∂Qµ ∂Qµ′
−
.
=
∂qλ ∂pλ
∂pλ ∂qλ ∂Qµ′
Mit anderen Worten: Es gilt
Q̇µ = Wµµ′
∂H
,
∂Qµ′
(9.3)
wobei
Wµµ′ = {Qµ , Qµ′ } = −{Qµ′ , Qµ }
H.W. Diehl
SS 2008
(9.4)
42
Dynamisches kritisches Verhalten. . .
Poissonklammern sind. Man überzeugt sich leicht davon, dass die Observable der Energie H
eine Erhaltungsgröße ist, sofern die angewandten Felder Hµ alle zeitunabhängig sind. Denn
unter dieser Voraussetzung ergibt sich für die Zeitableitung von H
∂H ∂H
∂H
d
Q̇µ = Wµµ′
H=
=0,
dt
∂Qµ
∂Qµ ∂Qµ′
(9.5)
wobei das letzte Gleichheitszeichen aus der Antisymmetrie von Wµµ′ bezüglich der Vertauschung
µ ↔ µ′ folgte.
9.2
9.2.1
Stochastische Gleichungen
Ausgangspunkt
Aus unserer Beschäftigung mit dem Memoryfunktionsformalismus wissen wir bereits, dass es
oft sinnvoll und möglich ist, sich auf eine kleine Teilmenge O ≡ {Oν } von Observablen zu
beschränken und die verbleibenden Variablen zu eliminieren bzw. über diese zu mitteln. Die
sich so ergebenden Bewegungsgleichungen für den eingeschränkten Satz von Variablen O sind
dann zwangsläufig stochastisch. Dies bedeutet, dass die Vorgabe der Anfangsbedingungen der
Variablen {Oν } bei t = 0 die Werte der Variablen {Oν (t)} für spätere Zeiten t > 0 nicht
eindeutig bestimmt. Stattdessen muss man ein Gewichtsfunktional W angeben, welches von
den Werten der O(t) für alle Zeiten t abhängt und die relative Wahrscheinlichkeit für diese
besondere Zeitentwicklung des Systems spezifiziert. Dieses Funktional W hängt parametrisch
auch von den zeitabhängigen Feldern h(t) ab.
Man kann dann Erwartungswerte hOν (t)i|h sowie zwei- und mehrzeitige Korrelationsfunktionen hOν (t)Oν ′ (t′ )i|h usw. definieren, indem man über alle möglichen Zeitevolutionen mit
dem Gewicht W mittelt. Die gleichzeitigen Erwartungswerte hOν (t)i|h, hOν (t)Qν ′ (t)i|h usw.
sind vollständig durch die Wahrscheinlichkeitsverteilung P[O; t] für die Werte von O zu einem
einzigen Zeitpunkt t bestimmt.
9.2.2
Forderungen an die Wahrscheinlichkeitsverteilung P[O; t]
Falls sich diese Wahrscheinlichkeitsverteilung P[O; t] aus einer mikroskopischen HamiltonFunktion H ableitet, so hat sie verschiedene Eigenschaften, die als Forderungen an mögliche
Kandidaten für solche Wahrscheinlichkeitsverteilungen zu stellen sind. Die erste betrifft die
Verträglichkeit mit dem thermodynamischen Gleichgewicht.
9.2.2.1 Verträglichkeit mit dem thermodynamischen Gleichgewicht
Falls die äußeren Felder {hν } zeitunabhängig sind, muss die Verteilung zeitunabhängig sein und
mit der thermodynamischen Gleichgewichtsverteilung der zuständigen (kanonischen oder großkanonischen) Gesamtheit übereinstimmen. Das heißt, die Wahrscheinlichkeitsverteilung muss
dann t-unabhängig sein P[O, t] und durch
"
!#
X
Peq [O] = Z −1 exp −β H[O] −
µ j Cj
(9.6)
j
gegeben sein, wobei
−βH[O]
e
H.W. Diehl
−βHmic [Q]
= SpQ e
Y
ν
SS 2008
δ(Oν − Oν [Q])
(9.7)
43
Dynamisches kritisches Verhalten. . .
mit
n
o
P
Z = SpQ e−β(Hmic [Q]− j µj Cj )
o
n
P
= SpQ e−β(H[O]− j µj Cj ) .
(9.8)
Die Variablen Cj sind Erhaltungsgrößen und eine Teilmenge der Variablen Q; die µj sind
zugehörige Lagrangemultiplikatoren.
Die Wahrscheinlichkeitsverteilung Peq [O] und die Abhängigkeit der Zustandssumme Z von
β = (kB T )−1 , µj und hν müssen mit der statistischen Gleichgewichtsmechanik kompatibel sein
und die statischen Eigenschaften des Systems richtig beschreiben. Insbesondere müssen sie die
richtigen statischen kritischen Eigenschaften liefern.
9.2.2.2 Relaxation ins Gleichgewicht
Falls die angewandten Felder h(t) für t > t0 zeitunabhängig sind, so dass
hν (t) = h(0)
ν ≡ hν (t0 ) ∀ν , t > t0 ,
dann muss P[O, t] im Limes t → ∞ gegen die Gleichgewichtsverteilung Peq [O] streben:
t→∞
P[O, t] −−−→ Peq [O] .
(9.9)
In Worten: Die Wahrscheinlichkeitsverteilung muss gegen eine durch die durch die Konstanten
der Bewegung vorgegebene Gleichgewichtsverteilung relaxieren.
9.2.2.3 Kausalität
Bei Anwesenheit zeitabhängiger Felder h(t′ ) können die Erwartungswerte hQν (t)i|h nur von
den Feldern h(t′ ) für t′ < t abhängen.
9.2.2.4 Fluktuations-Dissipations-Theorem
Das Fluktuations-Dissipations-Theorem muss gelten (sofern wir Gleichgewichtsdynamik betrachten). Wir bezeichnen die Fouriertransformierte der Responsefunktion χO , welche die Antwort des Erwartungswertes hO(x, t)i einer gegebenen Observablen O = Oν auf ein konjugiertes
hO (x′ , t′ ) beschreibt, mit χO (k, ω):
hO(k, ω)i|hO − hO(k, ω)i|0 = χO (k, ω) hO (k, ω) + o(hO ) .
(9.10)
Außerdem führen wir die Kumulante
CO (x − x′ , t − t′ ) = hO(x, t) O(x′, t′ )icum
(9.11)
und deren Fouriertransformierte
CO (k, ω) =
Z
d
d x
Z
∞
dt e−i(k·x−ωt) CO (x, t)
ein. Die Kumulante für gleiche Zeiten bezeichnen wir kurz mit
Z ∞
dω
CO (k, ω) ;
CO (k, t = 0) ≡
−∞ 2π
H.W. Diehl
(9.12)
−∞
SS 2008
(9.13)
44
Dynamisches kritisches Verhalten. . .
die statische Suszeptibilität dagegen mit
χO (k) ≡ χO (k, ω = 0) .
(9.14)
Das Fluktuations-Dissipations-Theorem (für klassische Systeme) lässt sich dann in der Form
CO (k, ω) =
2 ′′
2
ℑ[χO (k, ω)] =
χ (k, ω)
βω
βω O
(9.15)
angegeben.
Selbstverständlich müssen Real- und Imaginärteile χ′O (k, ω) bzw. χ′′O (k, ω) von χO (k, ω) die
Kramers-Kronig-Relationen erfüllen.
9.2.3
Definition von kinetischen Koeffizienten, Transportkoeffizienten und charakteristischen Frequenzen
Bei gegebener Responsefunktion χO (k, ω) definiert man den sogenannten kinetischen Koeffizienten ΓO (k) durch
−1
i ∂χ−1
O (k, ω) ΓO (k) ≡
(9.16)
∂ω
ω=0
und die (dissipative) charakteristische Frequenz
ωO (k) ≡ ΓO (k)/χO (k) .
(9.17)
Unter Zuhilfenahme des Fluktuations-Dissipations-Theorems (9.15) lässt sich zeigen (Übungsaufgabe), dass
2 CO (k)
i χO (k)
=
.
(9.18)
ωO (k) =
∂χO (k, ω)/∂ω|ω=0
CO (k, ω = 0)
Gelegentlich wird auch eine modifizierte charakteristische Frequenz ω̄O (k) durch die Forderung
ω̄Z
O (k)
dω
! 1
CO (k, ω) = CO (k)
(9.19)
2π
2
−ω̄O (k)
definiert. In den Fällen, in denen die Korrelationsfunktion CO (k, ω) ein bei ω = 0 zentriertes
Lorentzspektrum hat, sind die beiden Definitionen identisch. Bei einem Spektrum, welches bei
einer Frequenz 0 < ω0 < ∞ eine scharfe Spitze hat (wie im Falle einer propagierenden Mode),
ist die letztere Definition ungeeignet.
Schließlich definiert man bei erhaltenen Dichten O(x, t) — also einer Dichte, die einer
Kontinuitätsgleichung genügt, — einen Transportkoeffizienten λO , in dem man den expliziten
Faktor k 2 herausdividiert:
ΓO (k)
λO ≡ lim
.
(9.20)
k→0
k2
9.3
Erste Beispiele: die stochastischen Modelle A und B
Wir wollen im Folgenden kurz zwei erste wichtige Beispiele für stochastische Modelle der kritischen Gleichgewichtsdynamik vorstellen: die sogenannten Modelle A und B. Dazu müssen wir
uns zunächst mit einigem Lehrbuchwissen aus der Wahrscheinlichkeitstheorie u.a. über Gaußsche Wahrscheinlichkeitsverteilungen vertraut machen.
H.W. Diehl
SS 2008
45
Dynamisches kritisches Verhalten. . .
9.3.1
Charakteristische Funktion einer Wahrscheinlichkeitsverteilung
Es sei Ξ ∈ R eine Zufallsvariable und P(Ξ) ihre Wahrscheinlichkeitsdichte. Dann definiert man
Momente dieser Verteilung wie folgt:
Def.: Das n-te Moment Mn der Verteilung P(Ξ) ist durch
Mn ≡ hΞn i , n = 0, 1, . . . , ∞ ,
(9.21)
gegeben.
Die Momente der Wahrscheinlichkeitsverteilung charakterisieren diese (unter gewissen Voraussetzungen sogar eindeutig).
Kenntnis über alle Momente einer Verteilung erhält man durch Berechnung der zugehörigen
charakteristischen Funktion F (k).
Def: Es sei Ξ ∈ R eine Zufallsvariable mit der Wahrscheinlichkeitsverteilung P(Ξ). Dann ist
die zugehörige charakteristische Funktion durch
Z ∞
ikΞ
F (k) = he i ≡
eikΞ P (Ξ) dΞ
(9.22)
−∞
definiert.
Offensichtlich gilt
Mn =
Man kann F (k) wegen
F (k) =
dn F (k) .
d(ik)n k=0
∞
X
Mn
n=0
R∞
−∞
n!
(ik)n
(9.23)
(9.24)
als Momentenerzeugende verstehen. (Wegen
P(Ξ) dΞ = 1 gilt selbstverständlich M0 = 1.)
Der Logarithmus von F (k) erzeugt die sogenannten Kumulanten Cn :
ln F (k) =
∞
X
Cn
n=1
n
Cn =
n!
(ik)n ,
d ln F (k) .
d(ik)n k=0
(9.25)
(9.26)
Zwischen den niedrigsten Kumulanten und Momenten erhält man die folgenden Zusammenhänge:
C1
C2
C3
C4
=
=
=
=
M1 ,
M2 − (M1 )2 ,
M3 − 3 M2 M1 + 2 (M1 )3 ,
M4 − 4 M3 M1 − 3 (M2 )2 + 12 M2 (M1 )2 − 6 (M1 )4 ,
(9.27)
und
M1
M2
M3
M4
H.W. Diehl
=
=
=
=
C1 ,
C2 + (C1 )2 ,
C3 + 3 C2 C1 + (C1 )3 ,
C4 + 4 C3 C1 + 3 (C2 )2 + 6 C2 (C1 )2 + (C1 )4 .
SS 2008
(9.28)
46
Dynamisches kritisches Verhalten. . .
Man kann zeigen (Übungsaufgabe), dass die Momente rekursiv wie folgt mit den Kumulanten zusammenhängen:
n−1 X
n−1
Mp Cn−p .
(9.29)
Mn =
p
p=0
Aus den Ergebnisse (9.28) lässt sich die allgemeine Regel6
Y 1 Cm ρν
X
ν
Mn = n!
ρ
!
m
ν
ν!
ν
Zerlegungen
mit
P
ν
(9.30)
mν ρν =n
ablesen. Summiert wir über alle Zerlegungen der n Objekte Ξ in ρν Gruppen von mν dieser
Objekte.
Die Umkehrung lautet (Meeron, 1957; Kubo, 1962)6
X
Y 1 −M ρν
X
mν
ρν − 1 !
Cn = −n!
.
(9.31)
ρν !
mν !
ν
ν
Zerlegungen
mit
9.3.2
P
ν
mν ρν =n
Gaußsche Verteilung bei vorgegebenem Mittelwert und Varianz
9.3.2.1
Der Fall einer einzelnen reellwertigen Zufallsvariablen
Gaußsche Verteilungen sind durch die Vorgabe des Mittelwertes und der Varianz M2 eindeutig
festgelegt, denn es gilt der
Satz 9.1. Es sei Ξ ∈ R eine Zufallsvariable mit einer Wahrscheinlichkeitsverteilung P(Ξ). Es
sei bekannt, dass
(i) P(Ξ) eine Gaußverteilung sei;
(ii) der Mittelwert und die Varianz durch
hΞi
cum
hΞi = ξ ,
= hΞ i − hΞi2 = w ,
2
gegeben sind, wobei
h. . . i ≡
Z
∞
−∞
P(Ξ) . . . dΞ .
Dann gilt
2
exp − (Ξ−ξ)
2w
√
P(Ξ) =
2πw
6
Der Beweis ergibt sich durch Berechnung der charakteristischen Funktion:
w
2
F (k) = exp ikξ + (ik) .
2
(9.32)
(9.33)
S. z.B.: E. Meeron, J. Chem. Phys. 27, 1238 (1957); R. Kubo, J. Phys. Soc. Japan 17, 1100 (1962).
H.W. Diehl
SS 2008
47
Dynamisches kritisches Verhalten. . .
Aus ihr lesen wir ab, dass die Kumulanten der
ξ
Cn = w
0
Gaußverteilung durch
für n = 1 ,
für n = 2 ,
sonst ,
(9.34)
gegeben sind.
Für die Momente der Abweichung δξ ≡ Ξ−ξ vom Mittelwert ergibt sich daraus das Resultat
(
(n − 1)!! w n/2 für gerades n = 2, 4, . . . ,
n
(9.35)
h(Ξ − ξ) i =
0
für ungerades n = 1, 3, . . . ,
also beispielsweise
h(δΞ)6 i = 5!! h(δΞ)2i3 = 5 · 3 · 1 · w 3 .
9.3.2.2
Verallgemeinerung auf n reellwertigen Zufallsvariablen
Die obigen Ergebnisse lassen sich leicht auf n Zufallsvariablen Ξj , j = 1, . . . , N, verallgemeinern. Es gilt:
Satz 9.2. Die N-komponentige Zufallsvariable X = (Ξj ) ∈ RN habe ein Gaußsche Wahrscheinlichkeitsdicht P[Ξ), von der die ersten und zweiten Kumulanten bekannt seien:
hΞj i = ξj ,
j = 1, . . . , N,
h(Ξj − ξj )(Ξl − ξl )i = wjl ,
wobei w = (wjl ) eine positiv definite (reellsymmetrische) Matrix sei.
Dann ist P(Ξ) eindeutig durch
√
1
T
−N/2
det A exp − (Ξ − ξ) · A · (Ξ − ξ)
P(Ξ) = (2π)
2
(9.36)
(9.37)
(9.38)
gegeben, wobei A = w −1 die Matrixinverse von w ist.
Zum Beweis diagonalisiert man A mittels einer orthogonalen Matrix O:
O · A · OT = diag(λ1 , . . . , λN ) ,
wobei die Eigenwerte λj > 0 sind (wegen w > 0). Nach Transformation auf Normalkoordinaten
P
u = O · (Ξ − ξ) geht die quadratische Form (Ξ − ξ)T · A · (Ξ − ξ) in j λj u2j über. Das
Integrationsmaß geht in
dN Ξ = dΞ1 · · · dΞN = du1 . . . duN
über, da die Jabobideterminante
det(∂Ξj /∂ul ) = det O = 1
H.W. Diehl
SS 2008
48
Dynamisches kritisches Verhalten. . .
ist. In den u-Koordinaten faktorisieren die Integrale, die man für die Berechnung der charakteristischen Funktion benötigt. Nach Rücktransformation auf die Ausgangsgrößen und Berücksichtigung von
Y
det A =
λj
j
erhält man das obige Ergebnis. Die charakteristische Funktion F (k) ≡ hexp(ik · Ξ)i ist durch
1
T ·w·k
F (k) = eik·ξ− 2 k
(9.39)
gegeben.
9.3.3
Die stochastische Gleichungen der Modelle A und B
Wir wenden uns nun der angekündigten Formulierung der stochastischen Modelle A und B
der Gleichgewichtsdynamik zu (Halperin, Hohenberg, and Ma, 1972; Hohenberg and Halperin,
1977). Aus unseren Vorüberlegungen sollte klar sein, dass
• in der Modellierung durch stochastische Gleichungen alle langsamen Dichten beibehalten
werden sollten;
• neben dem Ordnungsparameter die Dichten erhaltener Größen zu den langsamen Variablen gehören;
• der Ordnungsparameter auch dann, wenn er nicht erhalten ist, aufgrund des Phänomens
der kritischen Verlangsamung in der Nähe von Tc zu den langsamen Variablen gehört.
9.3.3.1
Modell A
Bei Modell A nimmt man an, dass
a) der Ordnungsparameter nicht erhalten ist;
b) der Ordnungsparameter an keine erhaltenen sonstigen Dichten koppelt;
c) die Dynamik rein relaxierend ist.
Aus diesen Eigenschaften folgt u.a., dass der kinetische Koeffizient des Ordnungsparameters
keinen expliziten (aus der Erhaltung folgenden Faktor) k 2 hat.
Das Modell A ist durch die folgenden stochastischen Gleichungen (Langevin-Gleichungen)
definiert:
δH[φ] φ̇α (x, t) = −Γ
+ ζα (x, t) .
(9.40)
δφα (x) φ(x)=φ(x,t)
Dabei ist ζα eine gaußverteilte Rauschkraft mit dem Mittelwert
hζα (x, t)i = 0
(9.41)
hζα (x, t) ζβ (x′ , t′ )i = 2Γ kB T δαβ δ(x − x′ ) δ(t − t′ ) .
(9.42)
und der Varianz
Ferner ist H = H[φ] das Energiefunktional, das zur Gleichgewichtsverteilung ∝ e−βH gehört.
Dies bedeutet, dass H so gewählt werden muss, dass das statische kritische Verhalten richtig
H.W. Diehl
SS 2008
49
Dynamisches kritisches Verhalten. . .
beschrieben wird. Wenn man (wie wir hier) am kritischen Verhalten an einem üblichen kritischen
Punkt interessiert ist,7 kann man H wie folgt wählen:
Z
i
h1
τ̊
ů
(9.43)
H = dd x (∇φ)2 + φ2 + |φ|4 − h · φ
2
2
4!
Dabei ist φ = (φα ) ein n-komponentiges Vektorfeld. Die Bezeichnung (∇φ)2 bedeutet dabei
2
(∇φ) =
2
d X
∂φα
j=1
∂xj
.
Auf eine gründliche Rechtfertigung von H verzichten wir hier, da diese Thematik zur Statik
kritischer Phänomene gehört, die wir nicht erneut im Detail diskutieren wollen. Es sei aber
darauf verwiesen, dass H die statische Universalitätsklasse des n-komponentigen φ4 Modells
mit kurzreichweitigen Wechselwirkungen in d Dimensionen beschreibt. (Frage: Worin kommt
die Kurzreichweitigkeit zum Ausdruck?)
Im Hinblick auf das dynamische Modell ist Folgendes zu beachten:
• Dass die Varianz ∝ δ(t − t′ ) ist, bedeutet, dass die Beschreibung nur auf Zeitskalen
verlässlich ist, die groß sind im Vergleich zu den mikroskopischen Zeitskalen, auf der die
schnellen Variablen relaxieren.
• Die Annahme einer gaußverteilten Rauschkraft sollte a posteriori überprüft werden, indem
man nachschaut, ob sich das Verhalten auf langen Längen- und Zeitskalen ändert, wenn
man diese Annahme aufgibt. Die Annahme ist a priori nicht unvernünftig, sofern die
schnellen Variablen als unkorrelierte Rauschkraft beschrieben werden können.
• Die Annahme, dass die Varianz ∝ δαβ ist, garantiert die Verträglichkeit mit der O(n)Symmetrie, sofern H diese Symmetrie hat.
• Die Tatsache, dass derselbe Parameter Γ, der in der Langevingleichung auftritt, auch
in der Varianz mit genau diesem Faktor auftritt, hängt mit allgmeinen Forderungen an
Modelle der Gleichgewichtsdynamik zusammen. Würde dies nicht so sein, wäre das sogenannte detaillierte Gleichgewicht verletzt und nicht garantiert, dass der stationäre Zustand dem thermischen Gleichgewichtszustand entspräche. Wir sehen von einer Diskussion
dieser Problematik an dieser Stelle ab und verschieben sie auf später, wo wir sie dann
allgemeiner führen können.
9.3.3.2
Modell B
Bei Modell B nimmt man an, dass der Ordnungsparameter eine Erhaltungsgröße ist, die an
keine sonstigen Erhaltungsgrößen koppelt.
Da φ eine erhaltene Dichte ist, muss sie einer Kontinuitätsgleichung genügen. Dies bedeutet,
dass an die Stelle des deterministischen Anteils der rechten Seite der Bewegungsgleichung die
Divergenz eines Stroms treten muss. Ferner muss auch die Rauschkraft mit der Erhaltung
verträglich sein.
7
Würde es beispielsweise um das Verhalten in der Nähe eines trikritischen Punktes gehen, so würde man für
H das Energiefunktional eines φ6 -Modells wählen.
H.W. Diehl
SS 2008
50
Dynamisches kritisches Verhalten. . .
Man kann die Definition der Modelle A und B in folgender Weise zusammenfassen:
a δH[φ] φ̇α (x, t) = −Γ (i∇)
+ ζα (x, t) ,
(9.44)
δφα (x) φ(x)=φ(x,t)
wobei ζα eine gaußverteilte Rauschkraft mit dem Mittelwert
hζα (x, t)i = 0
(9.45)
hζα (x, t) ζβ (x′, t′ )i = 2Γ kB T δαβ (i∇)a δ(x − x′ ) δ(t − t′ )
(9.46)
und der Varianz
ist und a = 0 oder a = 2 im Falle von Modell A bzw. Modell B zu setzen ist.
Bemerkungen:
• Der deterministische Teil der rechten Seite der Bewegungsgleichung hat im Falle von
Modell B die Form
δH[φ] .
−∇jα (x, t) mit jα (x, t) = −Γ∇
δφα (x) φ=φ(x,t)
• Dass die Rauschkraft mit einer Kontinuitätsgleichung ebenfalls verträglich ist, folgt aus
der Tatsache, dass man ζα als
ζα (x, t) = ∇ · J (α) (x, t)
mit
(α)
hJj (x, t)i = 0
und
(α)
(β)
hJj (x, t) Jl (x′ , t′ )i = 2Γ kB T δαβ δjl δ(x − x′ ) δ(t − t′ )
darstellen kann.
H.W. Diehl
SS 2008
51
Dynamisches kritisches Verhalten. . .
10
Phänomenologische Skalentheorie
In diesem Kapitel wollen wir zunächst an die phänomenologische und lokale Skalentheorie statischer kritischer Phänomene erinnern, um anschließend deren Erweiterung auf die kritische
Dynamik zu erläutern.
10.1
Phänomenologische Skalentheorie statisch kritischer Phänomene
10.1.1
Definition der statischen kritischen Exponenten
Wir beginnen mit einer kurzen Zusammenfassung der Definition der wichtigsten kritischen
Exponenten für statische kritische Phänomene. Wir tun dies der Einfachheit halber am Beispiel von Ferromagneten. Ausführlichere Darstellungen finden sich in Lehrbüchern, entsprechenden Spezialvorlesungen sowie meinem ersten Vortrag bei der Sommerschule im Engadin.
Die kritischen Exponenten α, β, γ, δ und ν charakterisieren das kritische Verhalten verschiedener thermodynamischer Größen bei Annäherung an den kritischen Punkt entlang bestimmter
thermodynamischer Pfade. Die Definitionen sind in Tab. 1 zusammengestellt (Stanley, 1971;
Fisher, 1971; Binney, Dowrick, Fisher, and Newman, 1992), wobei
δT =
T − Tc
Tc
(10.1)
die auf die kritische Temperatur Tc bezogene Abweichung der Temperatur von dieser bedeutet.
Exponent
Definition
α
CH ∼ |δT |−α
β
γ
δ
ν
η
M ∼ (−δT )β
χT ∼ |δT |−γ
H ∼ |M|δ sgn(M)
(0)
≈ ξ± |δT |−ν
G(2) (x) ∼ |x|−(d−2+η)
Bedingungen
δT
H
M
6= 0
0
0
<0
>0
0
6= 0
0
0
0
6 0
=
0
0
6= 0
0
6= 0
0
0
Größe
spezifische Wärme bei konstantem
Magnetfeld
Nullfeldmagnetisierung
Isotherme Nullfeld-Suszeptibilität
kritische Isotherme
Korrelationslänge
Paarkorrelationsfunktion
Tabelle 1: Zusammenfassung der Definitionen der wichtigsten kritischen Exponenten für magnetische Systeme.
Diese Definitionen bedürfen einiger Zusatzbemerkungen:
1. Um der Möglichkeit Rechnung zu tragen, dass die Temperatursingularitäten der Suszeptibilitäten der Suszeptibilität und spezifischen Wärme im Limes δT → 0 durch verschiedene
Exponenten bestimmt sind, führt man außer den für δT → 0+ geltenden Exponenten γ
und α analog für δT → 0− definierte Exponenten γ ′ und α′ ein. Im Normalfall eines
kritischen Punktes in d < 4 Dimensionen gilt γ = γ ′ und α = α′ .
2. Wenn in der geordneten Phase eine kontinuierliche Symmetrie (wie beispielsweise O(3))
spontan gebrochen wird, treten auf der gesamten Koexistenzkurve von Goldstonemoden
H.W. Diehl
SS 2008
52
Dynamisches kritisches Verhalten. . .
verursachte Koexistenzsingularitäten auf. So ist dort beispielsweise die (über die Paarkorrelationsfunktion der zur spontanen Magnetisierung transversalen Ordnungsparameterkomponenten) definierbare transversale Korrelationslänge unendlich. In diesem Fall
muss man unterhalb von Tc zwischen transversaler Korrelationslänge ξt und longitudinaler Korrelationslänge ξl unterscheiden. Wir sehen von einer Vertiefung dieser Problematik
im Augenblick ab.
10.1.2
Phänomenologische thermodynamische Skalentheorie
In der Näherung der Landautheorie erhält man die Zustandsgleichung (Landau and Lifschitz,
1970; Fisher, 1983; Chaikin and Lubensky, 1995)
h = m (A2,1 δT + A4,0 m2 ) .
(10.2)
Dabei sind A2,1 und A4,0 nichtuniverselle Koeffizienten. Der Exponent 2 des zweiten Summanden
in der Klammer entspricht offenbar dem Exponenten 1/βLT , wobei
βLT =
1
2
(10.3)
der Wert des kritischen Exponenten β in der Landautheorie ist. Letzteres schließt man aus
der Tatsache, dass die Lösung der obigen Gleichung für h = 0 die spontane Magnetisierung
m0 ∼ |δT |1/2 ergibt. In analoger Weise liest man den klassischen Wert“
”
δLT = 3
(10.4)
für δ aus Gl. (10.2) ab. Durch dereb Differenziation nach h bei h = 0 sieht man, dass der
Exponent 1 von δT den Wert
γLT = 1
(10.5)
für γ liefert.
Man kann sich die Frage stellen, wie diese Zustandsgleichung abzuändern ist, wenn die Exponenten β und γ Werte annehmen, die von diesen klassischen“ Werten abweichen. Naiverweise
”
könnte man vermuten, dass eine Zustandsgleichung der Form
h = m (A2,1 δT γ + A4,0 m1/β )
gelten würde. Dies hätte allerdings die nicht aktzeptable Folge, dass für h 6= 0 nichtanalytische Temperaturabhängigkeiten thermodynamischer Größen bei δT = 0 auftreten würden. Ben
Widom (u. a.) schlug stattdessen vor, die Zustandsgleichung (10.2) in
h
m
D
(10.6)
= H±
|δT |∆
B|δT |β
mit nichtuniversellen Amplituden D und B umzuschreiben, wobei ∆ = βδ und für die Exponenten β, δ und ∆ deren klassische Werte (10.3), (10.4) bzw.
∆LT =
3
2
einzusetzen sind. Für die Skalenfunktionen H± der Zustandsgleichung folgt aus (10.2)
H± (h) = ± 1 + m1/βLT ,
H.W. Diehl
SS 2008
(10.7)
(10.8)
53
Dynamisches kritisches Verhalten. . .
wobei das Pluszeichen (Minuszeichen) sich auf den Fall δT → 0+ (δT → 0−) bezieht.
Die zentrale Aussage dieser Annahme ist, dass die Variable h ∝ h |δT |−∆ von den Variablen m und δT nur in der Form einer einzelnen skalierten Variablen m ∝ m |δT |−β abhängt.
Durch Auflösung nach der Magnetisierung m ergibt sich, dass diese für kleine δT und h in der
Skalenform
m(δT, h) ≈ B|δT |β M± (Dh|δT |−∆)
(10.9)
geschrieben werden kann. Dies bedeutet, dass die Kurvenscharen m(δT, h) bei entsprechender
Auftragung (s. Abb. 8) auf ein- und dieselbe Kurve M+ (y) bzw. M− (y) fallen müssen. Die
beiden Zweige M± müssen bei großen Werten von y zusammenpassen“, um die Analytizität
”
bei (T, h) 6= (Tc , 0) sicherzustellen ( Matching-Bedingungen“ genügen).
”
Abbildung 8: Skalenfunktionen M± (y) der Magnetisierung
Um zu einer Formulierung der entsprechenden Skalenhypothese für die Gibbssche freie Energie zu kommen, machen wir folgende Überlegungen: Wir nehmen an, dass bei verschwindendem
reduzierten Magnetfeld h = HµB /kB T (wobei µB eine geeignete Einheit für ein magnetisches
Moment — wie etwa das Bohrsche Magneton —ist) die Korrelationslänge ξ die einzige relevante
Länge ist. Wir führen dann die reduzierte Volumendichte der Gibbsschen freien Energie durch
den thermodynamischen Limes
fb (δT, h) = lim
V↑Rd
F
|V|kB T
(10.10)
ein, wobei |V| ≡ V der Volumeninhalt des Gebietes V ⊂ Rd ist. In dieser Größe gibt es außer
einem singulären Anteil8 fbsing , für den wir einen Skalenansatz machen werden, auch einen in
8
Es ist üblich, vom singulärem Anteil von fb zu sprechen, obwohl dieser für δT → 0 bei h = 0 verschwindet.
Hinter dieser Konvention steckt die Überlegung, dass partielle Ableitungen ∂ m1 +m2 fb /∂(δT )m1 ∂hm2 hinreichend
hoher Ordnung am kritischen Punkt δT = h = 0 aufgrund des nichtregulären Beitrags fbsing divergieren würden.
H.W. Diehl
SS 2008
54
Dynamisches kritisches Verhalten. . .
der Temperaturdifferenz δT und dem Magnetfel h regulären Beitrag. Wir nehmen daher eine
entsprechende Aufspaltung
fb = fbsing(δT, h) + fbreg
(10.11)
sing/reg
vor. Die Dichten fb und fb
(δT, h) haben die Dimension [Länge]−d . Wenn bei h = 0 außer
ξ keine andere Länge eine Rolle spielt, so sollte fbsing als
dimensionslose Zahl × ξ −d
geschrieben werden können. Um mit den obigen Annahmen für die Skalenform der Magnetisierung verträglich zu sein, muss die Abhängigkeit von h in Form eines skalierten Argumentes
h|δT |−∆ ∼ hξ yh mit
yh = ∆/ν
(10.12)
auftreten. Dies legt den Skalenansatz
fbsing (δT, h) ≈ ξ −d Y± (hξ yh )
(10.13)
nahe.
In diesem Skalenansatz tauchen zwei kritische Exponenten, nämlich yh sowie der Exponent ν der Korrelationslänge auf. Da man thermodynamische Größen durch Ableitungen der
Gibbsschen freien Energie bekommen kann, sollten alle kritische Exponenten, die das kritische
Verhalten thermodynamischer Größen charakterisierenden, durch diese ausdrückbar sein. Für
die spezifische Wärme CH=0 = −T ∂ 2 F/∂T 2 erhalten wir aus dem Skalenansatz (10.13)
CH=0 ∼ |δT |dν−2 .
(10.14)
Der Exponent α der spezifischen Wärme ist also durch die sogenannte Hyperskalenrelation
2 − α = dν
(10.15)
gegeben. Man spricht hier von Hyperskalenrelation, weil die Raumdimension d explizit auftritt.
Gewöhnliche Skalenrelationen sind Beziehungen zwischen kritischen Exponenten, in denen d
nicht explizit vorkommt (s.u.).
Durch ein- bzw. zweimalige Differenziation von fb nach h findet man für die kritischen
Exponenten β und γ die Ergebnisse
β = 2−α−∆
(10.16)
γ = −2 + α + 2∆ ,
(10.17)
∆ ≡ νyh
(10.18)
α + 2β + γ = 2
(10.19)
und
wobei wir
definiert haben.
Man kann die obigen Ergebnisse für α, β und γ verwenden, um das Skalengesetz
herzuleiten. Ursprünglich wurde diese Beziehung in Form einer Ungleichung, bei der das Gleichheitszeichen durch ≥ ersetzt ist, — der sogenannten Rushbrooke-Ungleichung — gefunden.
H.W. Diehl
SS 2008
55
Dynamisches kritisches Verhalten. . .
Für den Exponenten δ findet man aus dem Skalenansatz (10.13) bzw. dem daraus für die
Magnetisierung als Funktion von δT und h folgenden Ansatz mit ein wenig Überlegung das
Resultat
δ = β/∆ = β/(yh ν) .
(10.20)
Hinweis: Bei den oben vorgenommenen Herleitungen der kritischen Exponenten geht implizit
ein, dass die Skalenfunktionen Y± (h) bei h = 0 existiert und sich in den Limites h → ∞ so
verhält, dass ein von der Temperatur unabhängiger Grenzwert existiert.
10.1.3
Phänomenologische Skalentheorie lokaler Observablen
Es gibt eine sehr nützliche Verallgemeinerung der phänomenologischen Skalentheorie für das
Verhalten lokaler Dichten. Diese geht weitgehend auf Patashinskiǐ and Pokrovskiı̌ (Patashinskiı̌,
Pokrovskiı̌, and Khokhlachev, 1973) zurückgehende lokale phänomenologische Skalentheorie
erlaubt es, aus geeigneten Annahmen Aussagen über das Verhalten von Korrelationsfunktionen
solcher lokalen Observablen zu machen.
Es sei O(x) eine lokale Dichte. Diese Dichte ist thermischen Schwankungen unterworfen. In
Anlehnung an die Quantenfeldtheorie, in der lokale Observablen durch Operatoren dargestellt
werden, spricht man auch von einem lokalen Operator. Bei einer Feldtheorie mit einer Wirkung
( Hamiltonian“), die nur von einer einzigen Dichte φ(x) (Ordnungsparameter) abhängt, ver”
steht man unter lokalen Dichten eine Größen, die von φ(x) und seinen partiellen
Ortsableitungen
P
p
∂ p φ(x)/∂xpi11 · · · ∂xiqq bis zu einer maximalen endlichen Ordnung p = qν=1 iν pν abhängt.
Es sei
[O] = µdO
(10.21)
die Dimension von O, wobei µ eine beliebige Impulsskala sein soll. Man nennt dO dann die
( naive“) Impulsdimension. Den Zusatz Impuls“ lässt man oft weg, wenn klar ist, was gemeint
”
”
ist. Im Englischen spricht man auch von der sogenannten engineering dimension“.
”
Aus Dimensionsgründen muss sich die Dichte O(x) als µdO mal eine dimensionslose Dichte
schreiben lassen; das heißt, es gilt
O(x) = µdO O(µx) .
(10.22)
Bei Änderungen der Einheit µ → µ′ = ℓµ gilt daher
O(ℓx) = µdO O(µℓx) = ℓ−dO (µ′ )dO O(µ′ x) = ℓ−dO O(x) .
(10.23)
Bei Systemen, die nichttriviale Skaleninvarianzeigenschaften haben, zeigen gewisse lokale Dichten — sogenannte Skalenoperatoren“ — eine abweichende Invarianzeigenschaft. Sie
”
genügen im Limes großer Längenskalen der Beziehung
O(ℓx) = ℓ−∆[O]O(x) ,
(10.24)
wobei ∆[O] von dO verschieden ist. Man nennt daher ∆[O] anomale Dimension oder auch
Skalendimension.
Man kann sich fragen, wie ein solches Verhalten zustande kommen kann. Schließlich müssen
Dimensionsüberlegungen grundsätzlich richtig sein. In der Tat können wir Gl. (10.24) mit Dimensionsbetrachtungen kombinieren, um sie in
O(ℓx) = µdO ℓ−∆[O] O(µx)
H.W. Diehl
SS 2008
(10.25)
56
Dynamisches kritisches Verhalten. . .
umzuformen.
Man kann sich die Bedeutung dieser Gleichung wie folgt klarmachen: Die Änderung der
Skala x → ℓx entspricht einer Änderung der Vergrößerung bei der Betrachtung durch ein
Mikroskop. Gl. (10.24) sagt aus, dass man bei einer solchen Skalenänderung dasselbe sieht,
”
wenn man gleichzeitig den Kontrast um den Faktor ℓ∆[O] nachreguliert“.
Wie Skaleninvarianz mit anomalen Dimensionen ∆[O] zustande kommen kann, erklärt die
Renormierungsgruppe (RG). Der entscheidende Mechanismus lässt sich elementar wie folgt verstehen. In physikalischen Theorien gibt es in der Regel eine minimale Länge amin , die der kürzesten Wellenlänge der in der Theorie vorkommenden Freiheitsgrade entspricht. Bei üblichen Gittermodellen ist dies beispielsweise die Gitterkonstante; bei einer Kontinuumsbeschreibung eine
Länge von einigen Gitterkonstanten, oberhalb derer eine Kontinuumsbeschreibung angemessen
ist. Die Strategie der RG besteht darin, diese minimale Länge amin in eine größere minimale
Länge a′min zu ändern, indem man alle Freiheitsgrade mit Wellenlängen λ ∈ (amin , a′min) in der
Zustandssumme ausintegriert. Dies führt im Allgemeinen zu einem gegenüber dem ursprünglichen Energiefunktional H geänderten Energiefunktional H′ . So kann sich die Amplitude des
Operators O um einen Faktor (a′min /amin )∆[O] ändern. Mit anderen Worten: Dass die anomale
Dimension an die Stelle der naiven tritt, ist auf den Einfluss der ausintegrierten Freiheitsgrade
mit Wellenlängen λ ∈ (amin , amin /ℓ) auf die zur Theorie mit der vergrößerten minimalen Länge
a′min = amin /ℓ gehörende Amplitude zurückzuführen.
Im Allgemeinen müssten wir auch noch berücksichtigen, dass sich die anderen Parameter
von H bei Vergrößerung der minimalen Länge ändern. Wenn allerdings im Limes ℓ → 0 großer
Längenskalen sich die Parameter des ℓ-abhängigen Energiefunktionals Hℓ nicht mehr ändern,
sondern Fixpunktwerte annehmen, so ergibt sich die in Gl. (10.24) behauptete Skaleninvarianz.
Um die Konsequenzen dieser Invarianz für Korrelationsfunktionen zu bestimmen, denken
wir uns βH durch einen Quellterm
Z
(10.26)
− dd x µdhO hO (x) O(x)
ergänzt. Dabei ist dhO die Impulsdimension von hO . Den Faktor µdhO haben wir abgespalten,
damit hO dimensionslos ist.
Durch funktionale Ableitungen der hO -abhängigen Zustandssumme können wir dann offensichtlich Erwartungswerte der Form
hO(x1 ) . . . O(xN )i
erzeugen. Wenn zusätzlich Translations- und Rotationsinvarianz im Ortsraum gelten, so können
wir diese mit der Skaleninvarianz kombinieren, um für die Zweipunktkumulante folgendes Ergebnis abzuleiten:
CO (x) = hO(x + y) O(y)icum = ℓ−2∆[O] CO (x/ℓ)i ,
(10.27)
wobei x = |x| die Länge des Ortsvektors x bezeichnet. ℓ ist ein frei wählbarer Parameter, den
wir durch die Forderung
µxℓ = 1
(10.28)
festlegen. Dies führt zu
CO (x) ≈ µ2dO (µx)−2∆[O] CO (1) .
H.W. Diehl
SS 2008
(10.29)
57
Dynamisches kritisches Verhalten. . .
Unter der Voraussetzung, dass die Amplitude CO (1) auf der rechten Seite wohldefiniert ist,
bedeutet das Ergebnis, dass die Korrelationsfunktion CO (x) ∼ x−2∆[O] zerfällt.
Der sich aus dem Zusatzterm (10.26) ergebende Beitrag zum Exponenten des BoltzmannFaktors ist dimensionslos. Es ist naheliegend zu vermuten, dass der Integrand hO unter Änderungen der minimalen Länge sich so wie die Dichte der freien Energie verhält. Da wir das
Verhalten von O kennen, können wir schließen, dass sich hO wie folgt unter Skalentransformationen wie
hO (ℓx) = ℓ−yh hO (x)
(10.30)
mit
yh = d − ∆[O]
(10.31)
verhält. Man nennt den Exponenten yh RG-Eigenexponent. hO wird aus naheliegenden Gründen
Skalenfeld genannt (Wegner, 1976).
Bei unserer thermodynamischen phänomenologischen Skalentheorie hatten wir gefunden,
dass alle kritischen Exponenten von thermodynamischen Größen durch zwei Exponenten —
beispielsweise β und ν — ausdrückbar sind. Man erwartet daher, dass alle kritischen Exponenten über Skalenrelationen mit den Skalendimensionen zweier unabhängiger Skalenoperatoren
zusammenhängen. Da thermodynamische Größen wie die Magnetisierung m und die spezifische
Wärme Ch=0 durch Ableitungen der freien Energie nach dem Magnetfeld bzw. der Temperaturdifferenz δT dargestellt werden können, liegt die Vermutung nahe, dass die beiden Skalenoperatoren durch die Ordnungsparameterdichte φ und die Energiedichte φ2 gegeben sind. Für
die Ordnungsparameterkumulante ergibt sich aus Gl. (10.29) am kritischen Punkt das asymptotische Verhalten
Cφ (x) ≈ µd−2 (µx)−2∆[φ] Cφ (1) .
(10.32)
Die Differenz zwischen der naiven Dimension 2dφ = d − 2 und der anomalen Dimension
2∆[φ] bezeichnet man traditionell mit η. Mit anderen Worten, es gilt
2∆[φ] = d − 2 + η ,
(10.33)
und der zugehörige RG-Eigenexponent yh ist durch
yh =
d+2−η
2
(10.34)
gegeben.
Um die Zusammenhänge mit den anderen kritischen Exponenten zu bestimmen, verallgemeinert man am besten die obigen Aussagen für Kumulanten auf nichtverschwindende Magnetfelder und Temperaturabweichungen δT . Wir können allgemeiner Mittelwerte und Kumulanten
des Skalenoperators O(x) für hO 6= 0 betrachten, wobei wir alle anderen Skalenfelder Null setzen. (Wir sind hier natürlich besonders an den Fällen hO = hφ und hO = δT interessiert, aber
die Überlegung gilt allgemeiner für ein beliebiges Skalenfeld.) Indem wir berücksichtigen, dass
bei der Skalentransformation hO in hO ℓ−yhO übergeht, folgt bei gleicher Wahl (10.28) von ℓ:
CO (x; hO , µ) ≈ µ2dO (µx)−2∆[O] CO (1; hO (µx)yhO , 1)
1/yhO
≈ µ2dO (µx)−2∆[O] F (µxhO
).
(10.35)
Dabei ergibt sich die Definition der Skalenfunktion F in der zweiten Zeile aus der ersten.
H.W. Diehl
SS 2008
58
Dynamisches kritisches Verhalten. . .
Die wichtige Erkenntnis ist, dass der Abstand x in der Skalenform in skalierter Form x/ξhO ,
wobei
−1/yh
(10.36)
ξhO = µ−1 hO O
eine sich aus hO ergebende charakteristische Länge ist.
Offensichtlich bedeutet dies, dass die Verallgemeinerung von Gl. (10.32) für nichtverschwindende Abweichungen h und δT vom kritischen Punkt als
Cφ (x) ≈ µd−2 (µx)−2∆[φ] F (x/ξ, h(µξ)yh )
(10.37)
mit ξ ∼ |δT |−1/yT geschrieben werden kann. Dabei ist yT der zum Skalenfeld ∼ δT gehörende
thermische RG-Eigenexponent. Dies bedeutet, dass
ν=
1
yT
(10.38)
ist. Überlegen Sie sich bitte, dass die kritischen Exponenten α, β, γ, δ, ∆ und η wie folgt durch
die beiden RG-Eigenexponenten yh und yT ausgedrückt werden können:
α = 2 − d yT ,
β =
ν
d − yh
= ν ∆φ = (d − 2 + η) ,
yT
2
γ = yT (2yh − d) = ν(2 − η) ,
yh
d+2−η
=
,
d − yh
d−2+η
yh
= ν yh ,
∆ =
yT
δ =
η = 2 + d − 2yh .
(10.39)
Beachten Sie bitte, dass in den Beziehungen, in denen d explizit auftaucht, implizit die Hyperskalenrelation (10.15) steckt.
10.2
Phänomenologische Skalentheorie der kritischen Dynamik
Die Verallgemeinerung der phänomenologoischen Skalentheorie auf die kritische Dynamik geht
auf Ferrell et al (1967) sowie Halperin and Hohenberg (1969) zurück. Um eine sinnvolle Erweiterung der statischen Skalentheorie zu erhalten, betrachten wir das dimensionslose Verhältnis
der dynamischen und statischen Responsefunktionen χO (k, ω) und χO (k). Dieses Verhältnis
muss sich als Funktion dimensionsloser Argumente schreiben lassen. Wie in der Statik sollten
die Argumente kξ und h(µξ)yh auftreten. Die Erweiterung besteht darin, dass nun ein mit einer
nichttrivialen Potenz von k (oder ξ) skaliertes Frequenzargument ∼ ω/k Z auftritt, wobei z ein
neuer kritischer Exponent ist, der sogenannte dynamische kritische Exponent.
Wenn wir — penibel, wie wir nun mal sind, — darauf achten, dass die Argumente der
Skalenfunktion alle dimensionslos gemacht werden sollten, so wird man auf den Ansatz
ω
χO (k, ω)
(±)
yh
≈ YO
,
kξ,
h(µξ)
χO (k)
Ω0 (k/µ)z
H.W. Diehl
SS 2008
(10.40)
59
Dynamisches kritisches Verhalten. . .
geführt.
Für die statische Suszeptibilität ergibt sich durch Fouriertransformation der Skalenform
(10.35):
1
(±)
χO (k) ≈ µ2dO −d (k/µ)2∆[O]−d XO (kξ, h(µξ)yh ) .
(10.41)
kB T
Wenn wir diese in Gl. (10.40) einsetzen, so folgt
1
ω
2dO −d
2∆[O]−d (±)
yh
.
χO (k, ω) ≈ µ
(k/µ)
χ̌O
, kξ, h(µξ)
kB T
Ω0 (k/µ)z
(10.42)
Um zu sehen, was diese Annahme für die dynamische Korrelationsfunktion bedeutet, verwenden wir das Fluktuations-Dissipations-Theorem
CO (k, ω) =
2kB T
ℑ[χO (k, ω)] ,
ω
(10.43)
um zu schließen, dass CO sich als
CO (k, ω) ≈ Ω0 (k/µ)z+2∆[O]−d ČO
ω
yh
,
kξ,
h(µξ)
Ω0 (k/µ)z
(10.44)
schreiben lassen muss.
Es ist eine nützliche Übung, sich zu überlegen, wie die entsprechenden Skalenformen in
den (x, t)-, (x, ω)- und (k, t)-Darstellungen aussehen. Wir überlassen diese dem interessierten
Leser, wollen aber noch explizit angeben, wie die obigen Skalenformen im wichtigen Spezialfall
O = φ aussehen. Für ihn ergibt sich
1
(±)
χφ (k) ≈ µ−η k η−2 Xφ (kξ, h(µξ)yh )
kB T
und
Cφ (k, ω) ≈ Ω0 µ
z−η η+z−2
k
Čφ
ω
yh
, kξ, h(µξ)
.
Ω0 (k/µ)z
(10.45)
(10.46)
Wir können die obigen Skalenansätze in den Ausdruck (9.18) für die charakteristische Frequenz ωO (k) einsetzen, um deren Skalenform zu erhalten. Sie lautet
ωO (k) = Ω0 (k/µ)z Ω̌ kξ, kξ, h(µξ)yh .
(10.47)
Das Ergebnis sagt aus, dass ωO im Limes k → 0 proportional zu k z nach Null geht. Die
zugehörige charakteristischen Zeitskala ∼ 1/ωO divergiert.
10.3
Lokale dynamische Skaleninvarianz
Wir wollen uns hier noch kurz überlegen, wie das Verhalten (10.24) von lokalen Skalenoperatoren auf die Dynamik verallgemeinert werden kann. Wir müssen bedenken, dass als lokale Skalenoperatoren auch Größen wie φ̇ infrage kommen können. Dies bedeutet, dass wir zeitabhn̈gige
Dichten O(x, t) betrachten müssen, deren Dimension auch eine Zeiteinheit beinhalten können.
Wenn wir annehmen, dass O(x, t) die Dimension
dt
[O(x, t)] = µdO Ω0O
H.W. Diehl
SS 2008
(10.48)
60
Dynamisches kritisches Verhalten. . .
hat, dann ergibt sich als Verallgemeinerung von Gl. (10.22) die Beziehung
dt
O(x, t) = µdO Ω0O O(µx, Ω0 t) .
(10.49)
Um die Verallgemeinerung des Transformationsverhaltens (10.24) unter Skalenänderungen
zu erhalten, müssen wir nur beachten, dass die Zeit t mit der Potenz ℓz skaliert werden muss.
Dies führt zu
(10.50)
O(ℓx, ℓzt) = ℓ−∆[O]O(x, t) .
Wer diesen Überlegungen folgen konnte, sollte kein Problem haben, die Skalendimension ∆[φ̇]
— oder allgemeiner ∆[Ȯ] — zu bestimmen. Ebenso sollte klar sein, dass die Kombination der
letzten beiden Gleichungen die Verallgemeinerung
dt
O(ℓx, ℓzt) = µdO Ω0O ℓ−∆[O] O(µx, Ω0 t)
(10.51)
von (10.25) liefert.
10.4
Überprüfung der dynamischen Skalenansätze im Rahmen der
Gaußschen Näherung für die Modellen A und B
Wir gehen von den stochastischen Gleichungen (9.44) der Modelle A und B aus und beschränken
uns auf den Fall der ungeordneten Phase T ≥ 0 bei Abwesenheit von Magnetfelder. Die Gaußsche Näherung bedeutet dann, dass wir ů = 0 setzen können. Sie entspricht (in diesem Fall)
der nullten Ordnung einer Entwicklung nach ů. In der (x, t)-Darstellung gelten dann die Langevingleichungen
φ̇α (x, t) = −Γ(i∇)a [(τ̊ − △)φα (x, t) − hα (x, t)] + ζα (x, t) ,
(10.52)
wobei die Varianz der Rauschkraft ζ nach wie vor durch Gl. (9.46) gegeben ist und sein Mittelwert verschwindet. Wir haben hier zunächst ein orts- und zeitabhängiges Magnetfeld beibehalten, damit wir durch funtionale Ableitung nach h bei h = 0 Responsefunktionen berechnen
können.
Durch Fouriertransformation folgt
−iω φα (k, ω) = −Γk a (τ̊ + k 2 )φα (k, ω) − hα (k, ω) + ζα (k, ω) .
(10.53)
Wir berechnen nun δ/δh(k′ , ω ′)|h=0 , mitteln über ζ und berücksichtigen, dass
δφα (k, ω) = χ(k, ω) δαβ (2π)d δ(k + k′ ) 2π δ(ω + ω ′ ) .
′
′
δhβ (k , ω ) h=0
(10.54)
Infolgedessen erhalten wir
χ(k, ω) = Γk a G0 (k, ω)
mit
G0 (k, ω) =
1
,
−iω + Γk a (k 2 + τ̊ )
(10.55)
(10.56)
wobei der Indez 0 die Gaußsche Näherung kennzeichnet.
H.W. Diehl
SS 2008
61
Dynamisches kritisches Verhalten. . .
Um die Korrelationsfunktion
hφα (k, ω) φβ (k′ ω ′ )i = C(k, ω) δαβ (2π)d δ(k + k′ ) 2π δ(ω + ω ′ )
(10.57)
in Gaußscher Näherung zu berechnen, kann man entweder die (h = 0)-Variante von Gl. (10.53)
in
hζα (k, ω) ζβ (k′ ω ′ )i = kB T 2Γ k a δαβ (2π)d δ(k + k′ ) 2π δ(ω + ω ′ )
(10.58)
einsetzen oder das FDT (10.43) verwenden. Auf beide Arten findet man das Resultat
kB T 2Γk a
C0 (k, ω) =
|−iω + Γk a (k 2 + τ̊ )|2
= G0 (−k, −ω) kB T 2Γk a G0 (k, ω) .
(10.59)
Aus der Information, die in der statischen Responsefunktion χ0 (k, ω = 0) steckt, liest man
die bekannten klassischen Werte (der Landau-Theorie)
ηLT = 0 und νLT =
1
2
(10.60)
ab. Insgesamt sieht man, dass die postulierten Skalenformen gelten und der dynamische krititsche Exponent z den Wert
2 bei Modell A
z0 = 2 + a =
(10.61)
4 bei Modell B
hat.
In der (k, t)-Darstellung sehen obige Gleichungen wie folgt aus:
G0 (k, t) = θ(t) e−Γk
a (τ̊ +k 2 )t
,
χ0 (k, t) = Γk a G0 (k, t) ,
kB T −Γka (τ̊ +k2 )|t|
e
τ̊ + k 2
Z ∞
=
dt′ G0 (k, t − t′ ) 2kB T Γk a G0 (k, −t′ ) .
(10.62)
(10.63)
C0 (k, t) =
(10.64)
−∞
Überzeugen Sie sich bitte davon.
Wir werden die freien Response- und Korrelationspropagatoren G0 und C0 wie in Abb. 9
gezeigt graphisch darstellen. Die Pfeile zeigen die Zeitrichtung an: Bei G0 zeigt uns die Zeitrichtung, dass t > t′ sein muss. Die graphische Darstellung von C0 entspricht dem Ausdruck in der
zweiten Zeile von Gl. (10.64), wobei der dicke Punkt mit den nach beiden Seiten auslaufenden
←
− −
→
←
−
Pfeilen einen Zweiervertex mit dem Gewicht 2kB T Γ ∇ · ∇ darstellt. (Der Operator ∇ wirkt
nach links auf das rechte Ende der dortigen Responsefunktion G0 .)
H.W. Diehl
SS 2008
62
Dynamisches kritisches Verhalten. . .
G0 (x, t; x′, t′ ) =
C0 (x, t; x′, t′ ) =
(x, t)
(x′ , t′ )
(x, t)
(x′ , t′ )
Abbildung 9: Graphische Darstellung der freien Response- und Korrelationspropagatoren.
H.W. Diehl
SS 2008
63
Dynamisches kritisches Verhalten. . .
11
11.1
Benötigtes Hintergrundwissen über stochastische Prozess
Zeitabängige Wahrscheinlichkeitsdichten
Es sei
t1 ≤ t2 ≤ · · · ≤ tN
eine geordnete Folge von Zeitpunkten. Wir betrachten eine reellwertige Zufallsvariable φ(t), die
zu diesen Zeiten tj mit den Werten φ(tj ) gemessen werde. Die Abfolge
{φ(t1 ), . . . , φ(tN )}
nennt man stochastischen Prozess.
Definitionen:
1.) Wahrscheinlichkeitsdichte P1 :
P1 (φ1 , t1 ) dφ1 = Pr[φ1 ≤ φ(t1 ) ≤ φ1 + dφ1 ]
= Wahrscheinlichkeit, dass φ(t1 ) im Intervall [φ1 , φ1 dφ1 ] liegt. (11.1)
2.) Verbundwahrscheinlichkeitsdichte Pm :
Pm (φ1 , t1 ; . . . ; φm , tm ) dφ1 · · · dφm
= Pr[φ1 ≤ φ(t1 ) ≤ φ1 + dφ1 , . . . , φ1 ≤ φ(tm ) ≤ φm + dφm ]
= Wahrscheinlichkeit, dass φ(t1 ) im Intervall [φ1 , φ1 + dφ1 ]
und φ(t2 ) im Intervall [φ2 , φ2 + dφ2 ] und . . . und φ(tm ) in
Intervall [φm , φm + dφm ] liegen.
(11.2)
(11.3)
Die Wahrscheinlichkeitsdichten haben folgende Eigenschaften:
• Positive Semi-Definitheit:
• Normierung:
Pm (φ1 , t1 ; . . . ; φm , tm ) ≥ 0 ,
(11.4)
Pm (φ1 , t1 ; . . . ; φm , tm ) dm φ = 1 ,
(11.5)
dφm Pm (φ1 , t1 ; . . . ; φm , tm ) = Pm−1 (φ1 , t1 ; . . . ; φm , tm−1 ) .
(11.6)
Z
• Hierarchieregel:
Z ∞
−∞
Rm
Bei Kenntnis der Pm kann man die durch
Z
hφ(t1 ) · · · φm (tm )i =
φ1 · · · φm Pm (φ1 , t1 ; . . . ; φm , tm ) dm φ
(11.7)
Rm
definierten Mittelwerte berechnen. Die Dichten lassen sich als Mittelwerte wie folgt darstellen:
Pm (φ1 , t1 ; . . . ; φm , tm ) =
Y
m
j=1
H.W. Diehl
SS 2008
δ[φ(tj ) − φj )
.
(11.8)
64
Dynamisches kritisches Verhalten. . .
Definition: Ein stochastischer Prozess heißt stationär, wenn alle Verbundwahrscheinlichkeitsdichten Pm gegen Zeitverschiebung invariant sind, d.h., die Eigenschaft
Pm (φ1 , t1 + ∆t; . . . ; φm , tm + ∆t) = Pm (φ1 , t1 ; . . . ; φm , tm )
(11.9)
für beliebige ∆t haben.
Bei stationären stochastischen Prozessen ist
hφ(t1 )i = hφ(0)i
zeitunabhängig, und für die Erwartungswerte von Produkten gilt
hφ(t1 + ∆t) · · · φ(tm + ∆t)i = hφ(t1 ) · · · φ(tm )i .
11.2
(11.10)
Bedingte Wahrscheinlichkeitsdichten
Um die kausale zeitliche Beeinflussungen von Ereignissen φ(tj ) zu charakterisieren, ist es nützlich bedingte Wahrscheinlichkeitsdichten Pm|k einzuführen. Diese sind analog zur Gl. (11.2) wie
folgt definiert:
Definition: Die bedingte Wahrscheinlichkeit dafür, dass φ(tk+j ) in φk+j · · · φk+j + dφk+j ∀j =
1, . . . , m unter der Bedingung, dass φ(ti ) in φi · · · φi + dφi ∀i = 1, . . . , k ist durch
Pm|k (φk+1 , tk+1 ; . . . ; φm , tm |φ1, t1 ; . . . ; φk , tk ) dφ1 · · · dφk+m
gegeben.
Ausgedrückt durch die Verbundwahrscheinlichkeiten gilt daher
Pm|k (φk+1, tk+1 ; . . . ; φm , tm |φ1 , t1 ; . . . ; φk , tk ) =
Pk+mk (φ1 , t1 ; . . . ; φk+m, tk+m )
.
Pk (φ1 , t1 ; . . . ; φk , tk )
Aufgrund der Normierung der Verbundwahrscheinlichkeiten gilt
Z
dφk+1 · · · dφk+m Pm|k (φk+1 , tk+1; . . . ; φm , tm |φ1 , t1 ; . . . ; φk , tk ) = 1 .
11.3
(11.11)
(11.12)
Stochastische Unabängigkeit und vollständig unkorrelierte stochastische Prozesse
Wir definieren zunächst den Begriff der stochastischen Unabhängigkeit.
Def.: stochastische Unabhängigkeit:
Die zeitliche Folge von Ereignissen φ(tk+1 ), . . . , φ(tk+m) heißt stochastisch unabhängig von
den vorangehenen φ(t1 ), . . . , φ(tk ), wenn die Ergebnisse φ1 , . . . , φk letzterer die Ergebnisse
φk+m , . . . , φk+m der nachfolgenden nicht beeinflussen. Dies bedeutet, dass
Pm|k (φk+1, tk+1 ; . . . ; φm , tm |φ1 , t1 ; . . . ; φk , tk ) = Pm (φk+1 , tk+1; . . . ; φk+m, tkm ) .
(11.13)
Falls dies gilt, sind φ(t1 ), . . . , φ(tk ) und φ(tk+1 , . . . , φ(tk+m ) unkorreliert.
H.W. Diehl
SS 2008
65
Dynamisches kritisches Verhalten. . .
Def.: vollständig unkorrelierter stochastischer Prozess:
Bei einem vollständig unkorrelierten stochastischen Prozess gibt es keinerlei Erinnerung an
frühere Ereignisse. Infolgedessen faktorisieren die Verbundwahrscheinlichkeiten:
Pm (φ1 , t1 ; . . . ; φm , tm ) =
11.4
m
Y
j=1
P1 (φj , tj ) .
(11.14)
Markov-Prozesse und Chapman-Kolmogorov-Gleichung
Man spricht von einer Markov-Kette, wenn die Zufallsvariable φ(tj ) nur von den Werten φj−1
zum vorhergehenden Zeitpunkt tj−1 abhängt, aber von allen Werten zu früheren Zeitpunkten
t1 , . . . , tj−2 unabhängig ist. MIt anderen Worten: Die Erinnerung bleibt nur einen Zeitschritt
erhalten.
Mathematische bedeutet die Markov-Eigenschaft eines stochastischen Prozesses, dass
Pm|1 (φm , tm |φ1 , t1 ; . . . ; φm−1 , tm−1 ) = P1|1 (φm , tm |φm−1 , tm−1 ) .
(11.15)
Bei Markov-Prozessen kann man offensichtlich alle Wahrscheinlichkeitsdichten als Produkte
der Anfangswahrscheinlichkeit P1 (φ1 , t1 ) und Übergangswahrscheinlichkeiten P1|1 (xj , tj |xj−1 , tj−1)
schreiben. Es gilt nämlich
Pm (φ1 , t1 ; . . . ; φm , tm ) = P1 (φ1 , tj )
m
Y
j=2
P1|1 (xj , tj |xj−1 , tj−1) .
Für P2 ergibt sich, wenn t ≤ t̃ ≤ t′ , das Resultat
Z
′ ′
P2 (φ, t; φ , t ) =
dφ̃ P3 (φ, t; φ̃, t̃; φ′ , t′ )
Z
=
dφ̃ P1|1 (φ′ , t′ |φ̃, t̃) P1|1 (φ̃, t̃|φ, t) P1(φ, t) ,
(11.16)
(11.17)
woraus nach Division durch P1 (φ, t) die sogenannte Chapman-Kolmogorov-Gleichung
Z
′ ′
(11.18)
P1|1 (φ, t|φ , t ) = dφ̃ P1|1 (φ′ , t′ |φ̃, t̃) P1|1 (φ̃, t̃|φ, t)
folgt.
Sie sagt aus, dass man die bedingte Wahrscheinlichkeitsdichte für den Übergang von (φ, t) →
(φ′ , t′ ) erhält, indem man das Produkt der jeweiligen Wahrscheinlichkeitsdichten des zweistufigen Übergangs (φ, t) → (φ̃, t̃) → (φ′ , t′ ) berechnet und dann über alle möglichen Zwischenwerte
φ̃ integriert.
Ein Gaußscher stochastischer Prozess ist vollständig durch die zweiten Momente hδφ(t) δφ(t′)i
(wobei δφ(t) = φ(t) − hφ(t)i) charakterisiert, denn alle höheren Momente faktorisieren (alle
höheren Kumulanten verschwinden). Man überlegt sich leicht, dass ein Gaußscher Prozess genau dann Markovsch ist, wenn die Erwartungswerte der Inkremente zu verschiedenen Zeiten t
und t′ faktorisieren, d.h., wenn
h[φ(t + τ ) − φ(t)][φ(t′ + τ ) − φ(t′ )]i = hφ(t + τ ) − φ(t)ihφ(t′ + τ ) − φ(t′ )i ∀t 6= t′ .
(11.19)
Wir haben hier angenommen, dass tj+1 − tj = τ ∀j. Beweisen Sie dies!
H.W. Diehl
SS 2008
66
Dynamisches kritisches Verhalten. . .
11.5
Master-Gleichung
Wir wollen nun eine Differentialgleichung für P1 (φ, t) herleiten. Dazu gehen wir von
Z
Z
′
′
P1 (φ, t + τ ) = dφ P2 (φ , t; φ, t + τ ) = dφ′ P1|1 (φ, t + τ |φ′ , t) P1 (φ′ , t)
(11.20)
aus und bilden den Grenzwert
P1 (φ, t + τ ) − P1 (φ, t)
∂P1 (φ, t)
≡ lim
τ →0
∂t
τ
Z
P1|1 (φ, t + τ |φ′ , t) − P1|1 (φ, t|φ′, t)
P1 (φ′ , t) .
=
dφ′ lim
τ →0
τ
(11.21)
Aus offensichtlichen Gründen muss gelten
P1|1 (φ, t|φ′, t) = δ(φ − φ′ ) .
(11.22)
Es liegt daher nahe, eine Entwicklung der Form
P1|1 (φ, t + τ |φ′ , t) = [1 + A(φ, t) τ + · · · ] δ(φ − φ′ ) + W (φ′ → φ, t) τ + · · ·
(11.23)
um τ = 0 anzunehmen. Wir haben dabei einen Term ∝ τ δ(φ − φ′ ) vorgesehen, weil die Normierung auf 1 einen solchen bei gegebener glatter Funktion W (φ′ → φ, t) erzwingt: Durch
Einsetzen der Entwicklung (11.23) in
Z
1 = dφ′ P1|1 (φ, t + τ |φ′ , t)
(11.24)
und Koeffizientenvergleich der O(τ )-Terme erhält man
Z
A(φ, t) = − W (φ′ → φ, t)dφ′ .
(11.25)
Infolgedessen ergibt sich die sogenannte Master-Gleichung
∂P1 (φ, t)
=
∂t
Da das Integral
gilt
R
Z
dφ′ [P1 (φ′ , t) W (φ′ → φ, t) − P1 (φ, t) W (φ → φ′ , t)] .
(11.26)
dφ der rechten Seite dieser Gleichung aus Symmetriegründen verschwindet,
Z
Z
dφ ∂t P1 (φ, t) = 0 = ∂t dφ P1 (φ, t) = 0 .
{z
}
|
=1
Also
• erhält die Master-Gleichung (11.26) die Normierung
9
R
dφ P1 (φ, t) = 1.9
Damit ist gemeint, dass die Gültigkeit dieser Normierung zu einem Anfangszeitpunkt t = t0 deren Gültigkeit
für die Lösung der Master-Gleichung zu allen späteren Zeiten t > t0 impliziert.
H.W. Diehl
SS 2008
67
Dynamisches kritisches Verhalten. . .
Für die Zeitableitung der durch
S(t) ≡ −kB hln P1 (φ, t)i = −kB
Z
dφ P1 (φ, t) ln P1 (φ, t)
(11.27)
definierten zeitabhängigen Entropie S(t) ergibt sich durch kurze Rechnung und Symmetrisierung
Z
Ṡ(t) = −kB dφ [1 + ln P1 (φ, t)] ∂t P1 (φ, t)
Z
Z
kB
P1 (φ, t)
=
dφ dφ′ [P1 (φ, t) W (φ → φ′ , t) − P1 (φ′ , t) W (φ′ → φ, t)] ln
.
2
P1 (φ′, t)
(11.28)
Dies lässt sich als
Ṡ(t) = σ(t) − hJS (φ, t)i
(11.29)
mit
kB
σ(t) =
2
Z
dφ
Z
dφ
′
P1 (φ, t) W (φ → φ′ , t)
P1 (φ, t) W (φ → φ′ , t)
− P1 (φ , t) W (φ → φ, t) ln
P1 (φ′ , t) W (φ′ → φ, t)
′
und
JS (φ, t) = kB
′
Z
dφ′ W (φ → φ′ , t) ln
W (φ → φ′ , t)
W (φ′ → φ, t)
(11.30)
(11.31)
schreiben.
Die Größe σ(t) hat die Bedeutung einer Entropieproduktionsrate. Sie ist positiv oder verschwindet, wie man mittels der aus der Konvexität von ln x folgenden Eigenschaft
(x − x′ ) ln(x/x′ ) ≥ 0
(11.32)
σ(t) ≥ 0 .
(11.33)
sieht. Es gilt also
Der Beitrag hJS (φ, t)i ist der Netto-Entropiefluss in den Zustand φ.
11.6
Der Spezialfall zeitunabhängiger Übergangswahrscheinlichkeiten, detailliertes Gleichgewicht
Wir betrachten nun den wichtigen Spezialfall zeitunabhängiger Übergangswahrscheinlichkeiten
W (φ → φ′ , t) ≡ W (φ → φ′ ) .
(11.34)
In diesem Fall kann man Folgendes zeigen:
• Falls φ auf ein endlichen Intervall beschränkt ist, gibt es mindestens eine Lösung der
Master-Gleichung (11.26) ( Zustand“) P (st) (φ) mit ∂t P (st) (φ) = 0 (genannt stationäre
”
Lösung).
H.W. Diehl
SS 2008
68
Dynamisches kritisches Verhalten. . .
• Falls die stationäre Lösung P (st) (φ) eindeutig ist, so ist sie auch stabil, und es gilt
t→∞
P(φ, t) −−−→ P (st) (φ)
(11.35)
Eine hinreichende Bedingung für P (st) (φ) lässt sich aus der Master-Gleichung (11.26) ablesen. Falls die Bedingung des detaillierten Gleichgewichts (detailed balance)
P(φ′ , t) W (φ′ → φ) = P(φ, t) W (φ → φ′ )
(11.36)
erfüllt ist, so verschwindet ∂t P(φ, t). Die Bedingung sagt, dass die Gewinn- und Verlustrate bei
den Übergängen φ ↔ φ′ ausgeglichen ist.
Das Streben (11.35) in den stationären Zustand geschieht durch irreversible Prozesse.
Eine offensichtliche Schwierigkeit der Bedingung des detaillierten Gleichgewichts besteht
darin, dass sie die Kenntnis des stationäre Zustand P (st) (φ) erfordert. Vorzuziehen sind Kriterien, die sich ausschließlich auf Eigenschaften der Übergangsraten W (φi → φj ) stützen. Es
gibt in der Tat ein solches Kriterium: Hinreichend und notwendig für die Existenz einer dem
detaillierten Gleichgewicht genügende Lösung der Master-Gleichung (11.26) ist, dass die jeweiligen Vorwärts- und Rückwärtsprozesse für beliebige Zyklen beliebiger Länge über nicht
notwendigerweise verschiedene Zwischenkonfigurationen φi gleich wahrscheinlich sind:
W (φ0 → φ1 ) W (φ1 → φ2 ) · · · W (φm−1 → φ0 )
= W (φ0 → φm−1 ) W (φm−1 → φm−2 ) · · · W (φ1 → φ0 ) .
(11.37)
Im Falle von Markov-Prozessen gilt die Master-Gleichung auch für P1|1 . Um dies zu sehen,
braucht man nur den Ansatz (11.23) in die Chapman-Kolmogorov-Gleichung (11.18) einzusetzen. Es ist evident, dass sich dann die Master-Gleichung
∂P1|1 (φ, t|φ0, t0 )
=
∂t
Z
dφ′ P1|1 (φ′ , t|φ0 , t0 ) W (φ′ → φ, t) − P1|1 (φ, t|φ0, t0 ) W (φ → φ′ , t) .
(11.38)
ergibt.
11.7
Spezialisierung auf den Fall diskreter Konfigurationsvariablen
Wir spezialisieren nun auf den Fall, dass die stochastische Variable diskrete Werte ρ annimmt.
Dann nimmt die Master-Gleichung die Form
X
∂t Pρ =
[Pρ′ (t) Wρ′ →ρ (t) − Pρ (t) Wρ→ρ′ (t)]
ρ′
= −
X
ρ′
Lρρ′ (t) Pρ′ (t)
(11.39)
an, wobei wir in der zweiten Zeile den Liouville-Operator
X
Lρρ′ = −Wρ′ →ρ (t) + δρρ′
Wρ→ρ′′ (t)
(11.40)
ρ′′
eingeführt haben.
H.W. Diehl
SS 2008
69
Dynamisches kritisches Verhalten. . .
Dieser Liouville-Operator ist im Allgemeinen nicht symmetrisch, d.h., wir müssen davon
ausgehen, dass
LT 6= L .
Im zeitunabhängigen Fall L(t) ≡ L, wo sich die Master-Gleichung durch Diagonalisierung bequem in Analogie zur stationären Schrödingergleichung lösen lässt, werden wir daher zwischen
Rechts- und Linkseigenvektoren zu unterscheiden haben (s.u.).
Die Master-Gleichung lässt sich im Dirac-Formalismus als
∂t |P(t)i = −L|P(t)i
(11.41)
schreiben.
P
Die in der Eigenschaft ρ Lρρ′ = 0 zum Ausdruck kommende Erhaltung der Normierung
bedeutet, dass es stets ein Eigenbra
X
h1| =
hρ|
ρ
mit dem Eigenwert 0 gibt:
h1|L|ρ′i =
X
Lρρ′ = 0 .
(11.42)
ρ
Wir wenden uns nun wieder dem Spezialfall zeitunabhn̈giger Übergangsraten Wρ→ρ′ (t) ≡
Wρρ′ zu. In diesem Fall ist L(t) ≡ L ebenfalls zeitunabhängig. Die Lösung der Master-Gleichung
(11.39) lässt sich als
|P(t)i = e−Lt |P(0)i
(11.43)
schreiben. Der Ansatz P(t) ∝ e−λt ϕρ führt auf das Eigenwertproblem
X
(α)
Lρρ′ ϕρ′ = λ(α) ϕ(α)
ρ
(11.44)
ρ′
mit den Rechtseigenvektoren
(β)
..
.
(α)
ϕρ .
..
.
Für die Linkseigenvektoren (. . . , ψρ , . . . ) gilt entsprechend
X (β)
ψρ′ Lρ′ ρ = λ(β) ψρ(β) .
(11.45)
ρ′
Man kann Rechts- und Linkseigenvektoren so wählen, dass sie den Orthonormalitätsbedingungen
X
αβ
(11.46)
hα|βi =
ψρ(α) ϕ(β)
ρ = δ
ρ
genügen.
Die allgemeine Lösung der Master-Gleichung (11.39) bei zeitunabhängigem L ist eine Linearkombination
X
(α)
(11.47)
Pρ (t) =
c(α) e−λ t ϕ(α)
ρ
α
H.W. Diehl
SS 2008
70
Dynamisches kritisches Verhalten. . .
mit c(α) ∈ C. Die Eigenwerte treten i.A. als komplex konjugierte Paare mit ℜλ(α) ≥ 0 auf. Bei
nichtverschwindenen Imaginärteilen gibt es (neben relaxierenden) auch oszillatorische Anteile
in der Lösung (11.47).
Wenn die Bedingung des detaillierten Gleichgewichts
(st)
Pρ′ Wρ′ →ρ = Pρ(st) Wρ→ρ′
(11.48)
(st)
für die stationäre Lösung Pρ erfüllt ist, kann man den Liouville-Operator durch die Definition
q
(st)
(st)
′
Pρ′ /Pρ Lρρ′
L̃ρρ =
=
(P
Wρ→ρ′′
q
q
(st)
(st)
(st)
(st)
−Wρ′ →ρ Pρ′ /Pρ = −Wρ→ρ′ Pρ /Pρ′
ρ′′
, falls ρ = ρ′ ,
, falls ρ 6= ρ′ ,
(11.49)
(α)
symmetrisieren. Da L̃T = L̃ braucht man bei dessen Eigenvektoren φρ nicht zwischen Rechtsund Linkseigenvektoren zu unterscheiden. Sie hängen mit den Rechts- und Linkseigenvektoren
von L in der Form
p
p
(α)
Pρ = ψρ(α) Pρ
φ(α)
(11.50)
ρ = ϕρ /
zusammen.
Die Symmetrie fon L̃ garantiert, dassPdie Eigenwerte reell sind. Negative Eigenwerte würden
zu Konflikten mit der Erhaltung von ρ Pρ (t) = 1 führen. Daher gilt λ(α) ≥ 0. Bei langen
Zeiten ist die t-Abhängigkeit der Überlagerung (11.47) vom kleinsten nichtverschwindenden
Eigenwert λ(α) bestimmt, der in ihr vorkommt.
(st)
Man kann PρN durch eine Folge von Übergängen bestimmen, indem man von einem Start(st)
zustand Pρ0 ausgeht. Dies ergibt
Pρ(st)
N
=
WρN−1 →ρN
Pρ(st)
N−1
WρN →ρN−1
= ... =
Pρ(st)
0
N
−1
Y
j=0
Wρj → ρj+1
.
Wρj+1 →ρj
(11.51)
Aufgrund der Bedingung des detaillierten Gleichgewichts (11.37) vereinfacht sich dies zu
Pρ(st)
= Pρ(st)
0
N
Wρ0 →ρN
.
WρN →ρ0
(11.52)
Es ist also unabhängig vom Weg ρ0 → . . . → ρN . Infolgedessen lässt sich durch
Pρ =
X
1 −Φρ
e
mit Z =
e−Φρ
Z
ρ
(11.53)
ein Potential φρ einführen. Durch Logarithmierung von Gl. (11.51) ergibt sich
ΦρN − Φρ0 =
N
−1
X
j=0
ln
Wρj → ρj+1
Wρ0 →ρN
= ln
.
Wρj+1 →ρj
WρN →ρ0
(11.54)
Aufgrund dessen kann das Potential mit einem effektiven Energiefunktional H/kB T identifiziert werden. Wir können das Fazit ziehen, dass ein stochastischer Prozess, welcher die
H.W. Diehl
SS 2008
71
Dynamisches kritisches Verhalten. . .
Bedingung des detaillierten Gleichgewichts erfüllt, die Relaxation eines physikalischen Systems
ins thermische Gleichgewicht beschreiben kann.Wenn dagegen die Bedingung des detaillierten
Gleichgewichts verletzt ist, gibt es Wahrscheinlichkeitsströme zwischen den verschiedenen Konfigurationen und das System ist daher in wesentlicher Weise aus dem Gleichgewicht gebracht.
Es ist nützlich, sich die Anforderungen des detaillierten Gleichgewichts in zwei wichtigen
Fällen genauer anzusehen. Wir beginnen mit der Diskussion der der mikrokanonischen Gesamtheit entsprechenden Situation, bei der die Gesamtenergie festgehalten wird. In diesem Fall
findet die mikroskopische Dynamik auf einer Energiehyperfläche
ΣE = {ξ = (q1 , . . . , pf ) | H(ξ) = E}
statt. Für alle Mikrozustände ξ ∈ ΣE muss die Bedingung
W (ξ → ξ ′ ) = W (ξ ′ → ξ)
(11.55)
der Mikroreversibilität erfüllt sein. Aus der Bedingung des detaillierten Gleichgewichts (11.37)
ergibt sich dann, dass
P (st) (ξ) = P (st) (ξ ′ ) .
(11.56)
Das heißt, im thermischen Gleichgewicht befindet sich das System mit gleicher Wahrscheinlichkeit in jedem der Mikrozustände auf einer gegebenen Energiehyperfläche.
Der zweite wichtige Fall, den wir diskutieren wollen, ist der eines physikalischen Systems,
welches sich im Kontakt mit einem Wärmebad der Temperatur T befindet und Wärme mit
diesem austauschen kann. Die zugehörige Gleichgewichtsverteilung entspricht der kanonischen
Verteilung
1
e−H(ξ)/kB T .
(11.57)
P (st) (ξ) =
Z(T )
Übergangsraten, die mit der Bedingung des detaillierten Gleichgewichts im Einklang sind,
müssen die Beziehung
W (ξ → ξ ′ )
′
= e−[H(ξ )−H(ξ)]/kB T
(11.58)
′
W (ξ → ξ)
erfüllen. Dies ist der mikroskopische kinetische Hintergrund für die Beziehung (4.4), die zum
Fluktuations-Dissipations-Theorem (4.7) führte.
Monte-Carlo-Computersimulationen lassen sich als numerische Lösungen von Mastergleichungen verstehen. Um mit Hilfe dieser Methode Informationen über das Verhalten von Systemen im thermischen Gleichgewicht zu bekommen, müssen die Übergangsraten im Einklang
mit der Bedingung des detaillierten Gleichgewichts gewählt werden. Es gibt selbstverständlich viele Möglichkeiten, die Bedingung (11.57) zu erfüllen. Beim weit verbreiteten MetropolisAlgorithmus verwendet man die Übergangsraten
′
W (ξ → ξ ′) = min 1, e−[H(ξ )−H(ξ)]/kB T .
(11.59)
Diese Wahl bedeutet, dass der Übergang ξ → ξ ′ immer durchgeführt wird, falls dadurch die
Energie abgesenkt wird, wohingegen der Übergang zum höher energetischen Zustand nur mit
dem in dieser Gleichung auftauchenden Boltzmann-Faktor durchgeführt wird.
H.W. Diehl
SS 2008
72
Dynamisches kritisches Verhalten. . .
11.8
Kramers-Moyal-Entwicklung und Fokker-Planck-Gleichung
Wir wollen nun mit Hilfe der so genannten Kramers-Moyal-Entwicklung für den Fall, dass die
Zustandsvariablen ξ Werte in einer kontinuierlichen Menge annimmt, eine genäherte partielle
Differentialgleichung für P(ξ, t) herleiten. Dazu gehen wir von dem Analogon von Gl. (11.20),
nämlich
Z
P1 (ξ, t + τ ) = dη P1|1 (ξ, t + τ |ξ − η, t) P1(ξ − η, t) ,
(11.60)
aus. Dabei wollen wir annehmen, dass die bedingte Wahrscheinlichkeit P1|1 invariant gegenüber
Zeittranslationen ist, so dass
P1|1 (ξ, t + τ |ξ − η, t) ≡ Ptr (ξ − η, η, τ )
(11.61)
eine von der Anfangszeit t unabhängige Übergangswahrscheinlichkeit ist. Durch Entwicklung
nach η erhält man
Z
∞
X
j
(−η · ∇ξ ) Ptr (ξ, η, τ ) P1(ξ, t) . (11.62)
P1 (ξ, t + τ ) = dη Ptr (ξ, η, τ ) P1(ξ, t) +
j=1
Wir definieren nun die Größen
(j)
αi1 ,...,ij (ξ)
Da
1
≡ lim
τ →0 τ
Z
Z
dη ηi1 · · · ηij Ptr (ξ, η, τ ) .
dη Ptr (ξ, η, τ ) = 1 ,
(11.63)
(11.64)
ergibt sich die Kramers-Moyal-Entwicklung
P1 (ξ, t + τ ) − P1 (ξ, t)
∂P1 (ξ, t)
= lim
τ →0
∂t
τ
∞
h
i
X (−1)j
∂j
(j)
αi1 ...ij (ξ) P1(ξ, t) ,
=
k! ∂ξi1 · · · ∂ξij
j=1
(11.65)
wobei die Einsteinsche Summenkonvention (Summation über doppelt vorkommende Indizes)
gilt.
Bei Markov-Prozessen kann man von der Chapman-Kolmogorov-Gleichung (11.18) aus- und
in ähnlicher Weise vorgehen. Dann ergibt sich eine analoge Gleichung für die Übergangswahrscheinlichkeit P1|1 (ξ, t|ξ0, t0 ).
Oft tragen nur die beiden niedrigsten Momente zur Kramers-Moyal-Entwicklung bei, wäh(j)
rend die höheren Koeffizienten αi1 . . . ij mit j ≥ 3 verschwinden, weil die entsprechenden
Integrale o(τ ) sind.10 In diesem Fall reduziert sich die Gl. (11.65) auf die so genannte FokkerPlanck-Gleichung
10
∂P1 (ξ, t)
= −∇ξ J (1) (ξ, t)
∂t
1 ∂ 2 (2)
∂ (1)
= −
αi (ξ) P1 (ξ, t) +
αik (ξ) P1 (ξ, t) .
∂ξi
2 ∂ξi ∂ξk
(11.66)
Van Kampen (1992, Seite 198) sagt zu dieser Thematik Folgendes: “Kolmogorov’s proof (der Fokker-PlanckGleichung) is based on the assumption that α(j) = 0 for j > 2. This, however, is never true in physical systems.”
Wir brauchen diese Problematik hier nicht zu vertiefen. Die später zu diskutierende Renormierungsgruppe
erlaubt es zu zeigen, dass Korrekturen dieser Art das asymptotische kritische Verhalten nicht ändern.
H.W. Diehl
SS 2008
73
Dynamisches kritisches Verhalten. . .
Diese Gleichung hat die Form einer Kontinuitätsgleichung für die Wahrscheinlichkeitsdichte
P1 (ξ, t), wobei die Wahrscheinlichkeitsstromdichte J (1) (ξ, t) durch ihre Komponenten
(1)
(1)
Ji (ξ, t) = αi (ξ, t) P1 (ξ, t) −
1 ∂ (2)
αik (ξ) P1 (ξ, t)
2 ∂ξk
(11.67)
gegeben ist. Der erste und zweite Ausdruck in der zweiten Zeile von Gl. (11.66) werden als
Drift- bzw. Diffusionsterm bezeichnet.
H.W. Diehl
SS 2008
74
Dynamisches kritisches Verhalten. . .
12
12.1
Einführung in die Feldtheorie der dynamischen kritischen Phänomene
Formulierung der Modelle als Gauß-Markov-Prozesse
Wir haben nun genug Hintergrundkenntnisse bereitgestellt, dass wir uns der Untersuchung
der wichtigsten Modellen der kritischen Dynamik und ihrer feldtheoretischen Formulierung
zuwenden können.
Dazu betrachten wir eine für unser Zwecke hinreichend allgemeine Klasse von stochastischen
Prozesse, nämlich in der Zeit (zunächst) diskrete Gauß-Markov-Prozesse. Es sei
t0 < t1 < . . . < tN
mit
tj+1 − tj = τ
eine diskrete Folge von Zeiten, zu denen die Zufallsvariable φ(t) = {φα (t)} mit den Ergebnissen
φ(tj ) = φj gmessen werde. Wir nehmen vereinfachend an, dass die Zeitdifferenzen tj+1 − tj
aufeinanderfolgender Zeiten den von j unabhängigen Wert τ haben. Der Indez α nummeriert die
stochastischen Variablen φa lpha(t) durch. Bei stochastischen Prozessen auf einem Gitter würde
der Index α den Gitterplatz i und den Komponentenindex α von φ bezeichnen. Wir werden an
stochastischen Prozessen interessierte sein, die kontinuierlich im Ort sind. Daher wird α später
durch (x, α) zu ersetzen sein, wobei x ∈ Rd ein Ort und α ein Komponentenindex ist. Bei
Modellen, für die neben dem Ordnungsparameter noch weitere Dichten benötigt werden, würde
als weiterer Index zur Nummerierung dieser Dichten benötigt.
Es sei P(φ, t1 ; . . . ; φN , tN |φ0 ) die durch
Pr(φ1 < φ(t1 ) < φ1 + dφ1 , . . . , φN < φ(tN ) < φN + dφN |φ0 < φ(t0 ) < φ0 + dφ0 )
= P(φ, t1 ; . . . ; φN , tN |φ0 ) dφ1 · · · dφN dφ0
(12.1)
(Pr ≡ probability = Wahrscheinlichkeit definierte bedingte Wahrscheinlichkeitsdichte. Den Anfangszeitpunkt t0 denken wir uns festgehalten. Daher können wir ihn unterdrücken.
Die Eigenschaften Markov-Prozess bedeutet, dass die bedingte Wahrscheinlichkeitsdichte P
faktorisiert:
N
Y
P(φ1 , t1 ; . . . ; φN , tN |φ0 ) =
Pτ (φj |φj−1 ) .
(12.2)
j=1
Die Eigenschaft Gauß-Markov-Prozess bedeutet dann, dass Pτ eine Gaußfunktion ist, die wir
in der Form
o
n
′
F (φ′ )]2
exp − [φ−φ4τ−τ
′
D(φ )
p
(12.3)
Pτ (φ|φ′ ) =
4πτ D(φ′ )
schreiben.
H.W. Diehl
SS 2008
75
Dynamisches kritisches Verhalten. . .
12.2
Äquivalente Langevingleichung
Mittelwerte von φj -abhängigen Observablen unter der Bedingung des Anfangswert φ0 können
wir in folgender Weise umschreiben:
hA(φ0 , . . . , φN )iφ0 =
=
Hier ist
Z
Z
A(φ0 , . . . , φN )
dφ1 · · · dφN A(φ0, . . . , φN )
N
Y
j=1
N Z
Y
j=1
Pτ (φj |φj−1 ) dφ1 · · · dφN
δ ζj − φj + φj−1 + τ F (φj−1)
p
dζj
4πτ D(φj−1)
ζj2
× exp −
4τ D(φj−1)
Z
=
dζ1 · · · dζN PRK (ζ1 , . . . , ζN ) A φ0 , φ1 [ζ; φ0 ] . . . , φN [ζ; φ0 ] .
N
ζ j2
Y
−1/2 − 4τ D(φ j−1 )
PRK (ζ1 , . . . , ζN ) =
[4πτ D(φj−1 )]
e
(12.4)
j=1
die sich ergebende Verteilungsfunktion der Rauschkraft ζj mit dem Mittelwert
hζj i = 0 ,
j = 1, . . . , N ,
(12.5)
und der Varianz
hζjα ζj ′ α′ i = δαα′ δjj ′ 2D(φj−1 ) ,
∀j, j ′ = 1, . . . , N ,
(12.6)
j = 1, . . . , N ,
(12.7)
und φj [ζ; φ0 ] bezeichnet die Lösung von
φj = φj−1 + τ F (φj−1) + ζj ,
bei gegebenen Rauschkräften ζj und Anfangswert φ0 .
Im formalen Limes ergibt sich mit den Ersetzungen
φj − φj−1
→ φ̇ und
τ
δjj ′
→ δ(t − t′ )
τ
die Langevingleichung (in der Ito-Interpretation)
φ̇(t) = F [φ(t)] + ζ(t) ,
(12.8)
wobei die Rauschkraft Gaußsch ist und verschwindenden Mittelwert
hζα (t)i = 0
(12.9)
hζα (t) ζα′ (t′ )i = δαα′ 2D[φ(t)]
(12.10)
sowie die Varianz
hat. Mit dem Zusatz in der Ito-Interpretation“ hat es folgende Bewandtnis: Die Langevinglei”
chung erhält im Allgemeinen erst durch die Festlegung einer Diskretisierung eine eindeutige
Interpretation. Die in Gl. (12.7) spezifierte Diskretisierung entspricht der Ito-Interpretation.
H.W. Diehl
SS 2008
76
Dynamisches kritisches Verhalten. . .
Würde man eine andere Diskretisierung wählen, so wäre der stochastische Prozess nicht äquivalent. Um dies zu verstehen, drücken wir die Rauschkraft ζ durch ein Rauschkraft ϑ aus, die
von der stochastischen Variablen unabhängig ist. Wir können beispielsweise
ϑ(t) = [2D(φ(t)]−1/2 ζ(t)
wählen. Dann gilt
hϑ(t)i = 0 und hϑα (t) ϑα′ (t′ )i = δαα′ δ(t − t′ ) .
In der Langevingleichung (12.8) steht dann anstelle von ζ(t) der Ausdruck [2D(φ(t)]1/2 ϑ(t).
Die Rauschkraft ϑ(t) ( weißes Rauschen“) kann man sich als δ-Stösse vorstellen. Es kommt nun
”
offensichtlich darauf an, ob man im Vorfaktor den Wert von φ unmittelbar vor oder nach einem
solchen δ-Stoß oder eine Linearkombination davon einsetzt. Diese Mehrdeutigkeit tritt immer
dann auf, wenn man Rauchkräfte hat, die von der stochastischen Variablen abhängen. (Man
spricht in diesem Zusammenhang auch von multiplikativem Rauschen“.) Die Mehrdeutigkeit
”
enfällt, wenn D(φ) eine von φ unabhängige Konstante ist. (In diesem Fall spricht man von
additivem Rauschen“.)
”
Im Prinzip gibt es bei vorgegebener Langevingleichung (12.8) unendlich viele Diskretisierungsmöglichkeiten. Neben der Ito-Interpretation ist die gebräuchlichste die sogenannte Stratonovich-Interpretation, bei der man D(φj−1 ) durch das arithmetische Mittel [D(φj )+D(φj−1 )]/2
ersetzt wird. Wichtig ist, sich zu merken, dass im Falle von multiplikativem Rauschen beide
Interpretationen der Langevin-Gleichungen inäquivalent sind, also auch zu unterschiedlichen
Fokker-Planck-Gleichungen führen!
12.3
Onsager-Machlup-Funktional
Es ist nützlich, sich den Zusammenhang zwischen dem von uns betrachteten Gauß-MarkovProzess und der Langevingleichung auch klarzumachen, indem man in umgekehrter Reihenfolge
von der zweitgenannten Darstellung des stochastischen Prozesses die erstgenannte ableitet.
Im formalen Limes τ → 0 ergibt sich aus Gl. (12.4) als Pfadwahrscheinlichkeitsdichte für
die Rauschkraft ζ(t) der Ausdruck
Z
1 t0 +T
−1
−1
dt ζ(t) D[φ(t)] ζ(t) D[ζ] ,
PRK ([ζ(t)]|t0 ≤ t ≤ t0 + T ) D[ζ] = (N [φ]) exp −
4 t0
(12.11)
wobei
N =T /τ
Y
dζj , τ → 0 ,
(12.12)
D[ζ] =
j=1
und
T /τ
Y
N [φ] =
[4πτ D[φ(t0 + (j − 1)τ ))]1/2 ,
j=1
Man kann durch
τ →0.
PRK ([ζ(t)]|t0 ≤ t ≤ t0 + T ) D[ζ] ≡ P([φ(t)]|t0 ≤ t ≤ t0 + T ) D[φ]
(12.13)
(12.14)
eine Pfadintegraldichte P([φ(t)]|t0 ≤ t ≤ t0 + T ) für die stochastische Variable φ(t) einführen.
Dabei hängen φ(t) und ζ(t) über die Langevingleichung (12.8) (funktional) voneinander ab. So
H.W. Diehl
SS 2008
77
Dynamisches kritisches Verhalten. . .
ergibt sich
P([φ(t)]|t0 ≤ t ≤ t0 + T ) = PRK ([φ̇(t) − F [φ(t)]]|t0 ≤ t ≤ t0 + T ) |J|[φ]
(12.15)
mit der (funktionalen) Jacobideterminanten
J[φ] ≡ det
δζ
.
δφ
(12.16)
Bei dieser Ableitung muss der (τ → 0)-Limes unseres Gauß-Markov-Prozesses herauskommen, denn wir müssten ja nur unsere frühere Ableitung der Lagenvingleichung aus dem GaußMarkov-Prozess rückwärts lesen. Dies bedeutet, dass bei der von uns gewählten ( Präpunkt”
“)Diskretisierung die Jacobideterminante den Wert 1 haben muss. Dies ist in der Tat der Fall,
denn diskretisiert gilt bei dieser Diskretisierung
1 0 · · · 0
. . .. .
∗
1
.
∂ζ
=
det ∂φjj,α
(12.17)
=1,
′ ,α′
∗ ∗ . . . 0
∗ ∗ · · · 1
wobei ∗ für irgendwelche Werte steht. Das Ergebnis 1 ist eine Folge der Dreiecksstruktur der
Jacobimatrix (Nullen oberhalb der Hauptdiagonalen). Für andere Diskretisierungen gilt dies
nicht. Wir werden unten auch auf andere Diskretisierungen eingehen, wollen aber an dieser Stelle die Thematik nicht vertiefen. Es sei aber darauf hingewiesen, dass in der Arbeit von Bausch,
Janssen, and Wagner (1976) keine Präpunkt- sondern eine Mittelpunktsdiskretisierung verwendet wurde (statt φj−1 → (φj + φj−1 )/2). Infolgedessen wurde dort eine nichtverschwindende
Funktionaldeterminant erhalten.11
Das sich auf diese Weise ergebende Funktional
G[φ] = − ln PRK ([φ̇(t) − F [φ(t)]]|t0 ≤ t ≤ t0 + T ) |J|
Z
1 t0 +T
dt φ̇ − F [φ] [D(φ)]−1 φ̇ − F [φ]
= − ln det |J[φ]| +
4 t0
(12.18)
heißt Onsager-Machlup-Funktional.
Wir wollen uns den von der Funktionaldeterminante kommenden Term noch etwas genauer
ansehen, indem wir ihn formal berechnen. (Vorsicht! Die nachfolgenden Rechnungen sind nur
durch Rückgriff auf eine Diskretisierung wohldefiniert.) Dazu schreiben wir die Jacobideterminante wie folgt um:
δζα (t)
δ[φ̇α (t)−Fα (φ(t))]
′
′ ∂Fα [φ]
′
det δφ ′ (t′ ) = det
= det ∂t det δαα δ(t − t ) − θ(t − t ) ∂φ ′
, (12.19)
δφ ′ (t′ )
α
α
α
wobei wir ∂t θ(t − t′ ) = δ(t − t′ ) verwendet haben. Den Logarithmus der hinteren Determinante
ist von der Form
∞
X
1
SpAk .
(12.20)
ln det(11 − A) = Sp ln(11 − A) = −
k
k=1
11
Die dort im Anhang gemachte Behauptung, dass diese Wahl der Diskretisierung notwendig sei, um Kausalität zu garantieren, trifft nicht zu.
H.W. Diehl
SS 2008
78
Dynamisches kritisches Verhalten. . .
Dabei hat die Matrix A die Elemente
Aα,α′ (t, t′ ) = θ(t − t′ )
Infolgedessen gilt
τ SpA = θ(0)
Z
∂Fα (φ)
(t) .
∂φα′
t0 +T
dt
t0
∂Fα
.
∂φα
(12.21)
Die höheren Potenzen geben keine Beiträge, weil sie Produkte von θ-Funktionen enthalten, die
stets Null sind. Beispielsweise treten für k = 2 und k = 3 die Faktoren θ(t − t′ ) θ(t′ − t) und
θ(t−t′ ) θ(t′ −t′′ ) θ(t′′ −t) auf. Infolgedessen ergibt sich insgesamt aus der Funktionaldeterminante
der auf der rechten Seite von Gl. (12.21) Beitrag, so dass das Onsager-Machlup-Funktional im
Kontinuumslimes (bis auf eine Konstante) durch
Z t0 +T 1
∂Fα
−1
G[φ] =
dt
(12.22)
φ̇ − F [φ] [D(φ)] φ̇ − F [φ] + θ(0)
4
∂φα
t0
gegeben ist. Bei der von uns gewählten Präpunktdiskretisierung ist θ(0) = 0.
12.4
Feldtheoretische Formulierung nach Janssen und de Dominicis
Wir wollen nun eine auf Janssen (1976) und de Dominicis (1976) zurückgehende feldtheoretische Formulierung der oben betrachteten Modellklasse einführen, die Response- und Korrelationsfunktionen gleichrangig behandelt und sich für die Formulierung der Feynmanschen
Störungstheorie als besonders geeignet erwiesen hat. Wir könnten dies tun, indem wir von der
Onsager-Machlup-Darstellung (12.14) der Pfadintegraldichte ausgehen und das Quadrat im
Exponenten (12.22) durch eine Integraltransformation der Form
Z ∞
√
2
2
dxα e−xα −xαyα = π eyα /4 ,
−∞
linearisieren. Wir ziehen es vor, noch einen Schritt weiter zu unserer ursprünglichen GaußMarkov-Darstellung zurückzugehen und die Übergangswahrscheinlichkeitsdichte Pτ auf diese
Weise umzuschreiben. Dies führt zu
#
"
YZ ∞
′
′
φ − φ − τ F (φ )
dx
p α
p
exp −x2 − ix ·
Pτ (φ|φ′ ) =
′
τ D(φ′ )
2π
τ
D(φ
)
−∞
α
Y Z i∞
dφ̃α
=
Ωτ (φ̃, φ|φ′)
(12.23)
2πi
−i∞
α
mit
n
o
Ωτ (φ̃, φ|φ′ ) = exp τ D(φ′ ) φ̃2 − φ̃ · [φ − φ′ − τ F (φ′ )] .
(12.24)
Diese Darstellung hat verschiedene Vorteile und bedarf einiger Kommentare:
(i) Das Maß
Y dφα dφ̃α
2πi
α
enthält keine φ-abhängigen Faktoren wie
H.W. Diehl
p
D(φ′ ), ist daher unabhängig vom Prozess.
SS 2008
79
Dynamisches kritisches Verhalten. . .
(ii) Die Größen D(φ′ ) und F (φ′ ) tauchen nicht wie beim Onsager-Machlup-Funktional (12.22)
als Inverses bzw. Quadrat auf. Dies ist von Vorteil bei der Entwicklung der Störungstheorie. So würden beispielsweise die bei den Modellen A und B in F vorkommenden
φ2 φ-Beiträge einen Beitrag ∼ φ6 in G[φ] liefern.
(iii) Gemäß unserer Konstruktion gilt die Normierung
Y Z
α i R×R
dφ̃α dφα
2πi
Ωτ (φ̃, φ|φ′ ) = 1 .
(12.25)
Man kann dies a posteriori leicht nachprüfen, indem man das Integral über φα ausführt.
Dieses liefert
Z
dφ̃α ∞
dφ̃α
δ(−iφ̃α ) ,
dφα e−φ̃α φα =
2πi −∞
i
woraus Gl (12.25) wegen Ωτ (0, φ|φ′ ) = 1 sofort folgt.
(iv) Schreibt man die auf der rechten Seite von Gl. (12.2) als Faktoren auftretenden Übergangswahrscheinlichkeitsdichten Pτ gemäß Gl. (12.23) um, so braucht man für jedes der
N Intervalle (tj−1 , tj ), j = 1, . . . , N, eine separate Variable φ̃j . Während die Variablen
φj , j = 0, 1, . . . , N den jeweiligen Zeitpunkten tj = t0 + jτ zugeordnet sind, sind die φ̃j
den jeweiligen Intervallen (tj−1 , tj ) zugeordnet.
(v) Es gilt
Z
k
dφ̃α dφα
−∂
′
f (φα )
e−(φ̃α /i)(iφα −iφα)
2πi
∂φα
k
Z
−∂
δ(iφα − iφ′α )
=
dφα f (φα )
∂φα
dφ̃α dφα −φ̃α (φα −φ′α ) k
e
φ̃α f (φα ) =
2πi
Z
= f (k) (φ′α )
sowie die analoge Beziehung
Z
dφ̃α dφα −φ̃α (φα −φ′α )
e
(φα − φ′α )k g(φ̃α ) = g (k) (0) .
2πi
(12.26)
(12.27)
Dies zeigt, dass −iφ̃α und φα in ähnlicher Weise wie die Impuls- und Ortsoperatoren
p̂α = −i∂/∂xα und x̂α zueinander konjugiert sind.
(vi) Um die sich im Limes τ → 0 sich ergebende Fokker-Planck-Gleichung zu bestimmen,
müssen wir die Drift- und Diffusionsterme α(1) und α(2) bestimmen. Der Vergleich von
Ωτ mit Gl. (11.61) liefert
2
[η−τ F (φ)]
4τ D(φ)
.
(12.28)
Ptr (φ, η, τ ) = exp − p
4πτ D(φ)
Daraus ergibt sich (kann man ablesen), dass
α(1) (φ) = F (φ)
H.W. Diehl
SS 2008
(12.29)
80
Dynamisches kritisches Verhalten. . .
und
α(2) (φ) = 2 D(φ) .
(12.30)
Infolgedessen lautet die Fokker-Planck-Gleichung
∂2
∂
[Fβ (φ) P(φ, t)] +
[D(φ) P(φ, t)] .
∂t P(φ, t) = −
∂φβ
∂φβ ∂φβ
(12.31)
(vii) Wir haben bei der Formulierung des in der Zeit diskreten Gauß-Markov-Prozesses ein
spezielle Diskretisierung — die Präpunkt-Diskretisierung — vorgenommen. Mit Hilfe der
obigen Gln. (12.26) und (12.27) ist leicht zu sehen, dass alternative Diskretisierungen, bei
denen die Funktionen F und D nicht bei φ′ sondern an dem Zwischenpunkt
φ(γ) = γ φ + (1 − γ) φ′ , 0 ≤ γ ≤ 1 ,
(12.32)
D(φ′ ) → D(φ(γ) ) und F (φ′) → F (φ(γ) )
(12.33)
des Intervalls [t + τ, t] genommen würde, bei denen also die Ersetzungen
vorgenommen werden, zu geänderten Fokker-Planck-Gleichungen führen würden. Um stochastische Äquivalenz im Limes τ → 0 zu gewähren, müssen die jeweiligen Fokker-PlanckGleichungen übereinstimmen (hinreichend und notwendiges Kriterium). Dies kann man
bei Wahl einer solchen γ-Diskretisierung durch Hinzufügen geeigneter γ-abhängiger Kor(γ)
(0)
rekturterme im Analogon Ωτ von Ωτ ≡ Ωτ erreichen.
Lemma 12.1. Die Wahl
ln Ωτ (φ̃, φ|φ′ ) = −φ̃ · (φ − φ′ ) + τ (φ̃β − ∂φβ ) Fβ (φ(γ) ) + (φ̃β − ∂φβ )2 D(φ(γ) )
= τ φ̃2 D(φ(γ) ) − φ̃ · [φ − φ′ − τ F (φ(γ) ) + 2γ τ ∇φ(γ) D(φ(γ) )
(12.34)
+ τ γ 2 ∇2φ(γ) D(φ(γ) ) − γ ∇φ(γ) · F (φ(γ) )
garantiert, dass sich für jede Wahl von γ ∈ (0, 1) dieselbe Fokker-Planck-Gleichung (12.31)
ergibt.
Beweis: Gleichung (11.60) liefert hier mit
φ(γ) = φ − (1 − γ) η
und
Z
∇φ D(γφ + (1 − γ)φ′ ) = γ ∇φD[φ − (1 − γ)η]
P(φ, t + τ ) = dη Pτ(γ) (φ, t + τ |φ − η, t) P(φ − η, t)
Z
Z
dφ̃ −φ̃·η τ (φ̃β −∂φβ ) Fβ (φ(γ) )+(φ̃β −∂φβ )2 D(φ(γ) )
P(φ − η, t]
e
e
=
dη
2πi
= P(φ, t) − τ ∂ηβ {Fβ [φ − (1 − γ)η] P(φ − η, t)}η=0 + τ γ P(φ, t) ∂φβ Fβ (φ)
+ τ ∂η2β {D[φ − (1 − γ)η] P(φ − η, t)}η=0
− 2τ γ ∂ηβ {P(φ − η, t)∂φβ D(φ − (1 − γ)η) }η=0 + τ γ 2 P(φ, t) ∂φ2β D(φ) + O(τ 2 )
= P(φ, t) + τ ∂φβ [Fβ (φ, t)P(φ, t)] + τ ∂φ2β [D(φ)P(φ, t)] + O(τ 2 ) .
Indem man durch τ dividiert und den Grenzübergang τ → 0 durchführt, erhält man die
Fokker-Planck-Gleichung (12.31), was zu beweisen war.
H.W. Diehl
SS 2008
81
Dynamisches kritisches Verhalten. . .
Es sollte klar sein, dass die Abhängigkeit der Fokker-Planck-Gleichungen, welche sich bei
der Änderung (12.33) der Diskretisierungen ohne das Hinzufügen der γ-abhängigen Korrekturterme in Ωτ eine Folge der Nichtvertauschbarkeit der Operatoren φβ und ∂/∂φβ ist.
Dieses Phänomen tritt in völlig analoger Weise bei der Feynmanschen Pfadintegralformulierung der Quantenmechanik auf, wenn in der Wirkung Beiträge vorkommen, die vom
(kanonischen) Impuls und Ort abhängen (keine Summen von orts- und impulsabhängigen
Beiträgen sind). Dies ist beispielsweise der Fall bei geladenen Teilchen in ortsabhängigen
elektromagnetischen Feldern.
Interessierte Leser, den Zusammenhang zwischen Diskretisierung und Operatorordnung
in der Quantenmechanik näher anschauen möchten, können bei Mizrahi (1975), Leschke
and Schmutz (1977) sowie Langouche, Roekaerts, and Tirapegui (1979) nachlesen.
(viii) Wenn man übliche Differenziationsregeln wie die Kettenregel im Kontinuumslimes verwenden will, muss man γ = 1/2 wählen, denn aus
φ − φ(γ) = (1 − γ)(φ − φ′ )
φ′ − φ(γ) = −γ (φ − φ′ )
(12.35)
ergibt sich
f (φ) − f (φ′ ) = (φ − φ′ ) · ∇φ(γ) f (φ(γ) ) + γ −
+ O(|φ − φ′ |3 ) .
1
2
[(φ − φ′ ) · ∇φ(γ) ]2 f (φ(γ) )
(12.36)
Im Limes τ → 0 folgt also nur bei der Wahl γ = 1/2 das durch naive Anwendung der
Kettenregel gewonnene Resultat
df [φ(t)]
= φ̇(t) · ∇φf [φ(t)] .
dt
H.W. Diehl
SS 2008
82
Dynamisches kritisches Verhalten. . .
Literatur
Bausch, R., H. K. Janssen, and H. Wagner, 1976, Z. Phys. B 24, 113.
Binney, J., N. Dowrick, A. Fisher, and M. Newman, 1992, The Theory of Critical Phenomena
(Oxford University Press, New York, USA).
Chaikin, P. M., and T. C. Lubensky, 1995, Principles of condensed matter theory (Cambridge
University Press, Cambridge (GB)).
de Dominicis, C., 1976, J. Phys. (Paris) Colloq. 37, C1.
Fisher, M. E., 1971, in Critical Phenomena, edited by M. S. Green (Academic, London), Proceedings of the 51st. Enrico Summer School, Varenna, Italy, pp. 73–98.
Fisher, M. E., 1983, in Critical Phenomena, edited by F. J. W. Hahne (Springer-Verlag, Berlin),
volume 186 of Lecture Notes in Physics, pp. 1–139.
Forster, D., 1975, Hydrodynamic Fluctuations, Broken Symmetry, and Correlation Functions,
Frontiers in Physics (W. A. Benjamin, Reading, Mass.).
Götze, W., and M. Lücke, 1975, Phys. Rev. A 11(6), 2173.
Halperin, B. I., and P. C. Hohenberg, 1969, Phys. Rev. 177(2), 952.
Halperin, B. I., P. C. Hohenberg, and S.-K. Ma, 1972, Phys. Rev. Lett. 29(23), 1548.
Hohenberg, P. C., and B. I. Halperin, 1977, Rev. Mod. Phys. 49(3), 435.
Janssen, H.-K., 1976, Z. Phys. B: Condens. Matter 23, 377.
van Kampen, N. G., 1992, Stochastic Processes in Physics and Chemistry (Elsevier Science
Publishers B.V.), revised and enlarged edition.
Kubo, R., 1962, J. Phys. Soc. Japan 17(7), 1100.
Landau, L. D., and E. M. Lifschitz, 1970, Statistische Physik, volume V of Lehrbuch der Theoretischen Physik (Akademie Verlag, Berlin), 2nd edition.
Langouche, F., D. Roekaerts, and E. Tirapegui, 1979, Phys. Rev. D 20(2), 419.
Leschke, H., and M. Schmutz, 1977, Z. Phys. B 27(1), 85.
Meeron, E., 1957, The Journal of Chemical
http://link.aip.org/link/?JCP/27/1238/1.
Physics
27(6),
1238,
URL
Mizrahi, M. M., 1975, Journal of Mathematical
http://link.aip.org/link/?JMP/16/2201/1.
Physics
16(11),
2201,
URL
Patashinskiı̌, A. Z., V. L. Pokrovskiı̌, and S. B. Khokhlachev, 1973, Sov. Phys. JETP 36(4),
807, [Zh. Eksp. Teor. Fiz. 63, 1521–1524 (1972)].
Stanley, H. E., 1971, Introduction to Phase Transitions and Critical Phenomena, International
series of monographs on physics (Oxford University Press, Oxford).
H.W. Diehl
SS 2008
83
Dynamisches kritisches Verhalten. . .
Wegner, F. J., 1976, in Phase Transitions and Critical Phenomena, edited by C. Domb and
M. S. Green (Academic, London), volume 6, chapter 2, pp. 7–124.
H.W. Diehl
SS 2008
84