9. Hyperbolische Geometrie
Werbung

9. Hyperbolische Geometrie - eine neue Welt
Sphärische Geometrie - wie wir sie im vorigen Kapitel diskutiert haben - ist eine Geometrie, die zwar keine Euklidische Geometrie ist, die aber auch keine nicht-Euklidische
Geometrie ist. Traditionell versteht man nämlich unter einer Nicht-Euklidischen Geometrie eine Geometrie in der alle Definitionen, alle Postulate (ausser dem 5. Postulat)
und alle Axiome der Euklidischen Geometrie gelten. In diesem Sinne ist die sphärische
Geometrie keine nicht-Euklidische Geometrie, denn z.B. sind Geraden in der sphärischen
Geometrie endlich und nicht unendlich lang. Es stellt sich nun aber heraus, dass es eine
nicht-Euklidische Geometrie im strikten Sinne des Wortes tatsächlich ”gibt”. Dies ist die
”hyperbolische Geometrie” mit der wir uns jetzt befassen wollen. Diese hyperbolische Geometrie tritt völlig gleichberechtigt neben die Euklidische Geometrie (so ist bis heute offen
ob das Universum global gesehen Euklidisch oder hyperbolisch ist).
In diesem Kapitel beschäftigen wir uns also mit der hyperbolischen Geometrie. Hier sind
wieder alle Geodätischen unendlich lang. Aber es gibt, im Gegensatz zur Euklidischen Geometrie, zu jedem Punkt O außerhalb einer Geodäischen g unendlich viele, verschiedene
Geodätische durch P , die g nicht schneiden.
Die Entdeckung der hyperbolischen Geometrie ist eine der ganz grossen Entdeckungen
des 19. Jahrhundert mit vielen (auch nicht-mathematischen) Konsequenzen, auf die wir
hier aber leider nicht weiter eingehen können. Wir können hier nur einige wenige Aspekte
dieser ausgedehnten Theorie ansprechen.
Klaus Johannson, Geometrie (L2)
2
. Geometrie (L2)
A. Synthetische Hyperbolische Geometrie.
(In diesem Abschnitt folge ich [Gans] ziemlich genau).
Historisch gesehen ging es in der Geometrie lange darum zu zeigen, daß das komplizierte
Euklid’s Postulat 5 (siehe Kapitel 2) aus den anderen Sätzen des Euklidischen axiomatischen Systems folgt. Zwei Publikationen sind historisch besonders erwähnenswert:
(1) Saccheri, Euclides ab omni naevo vindicatus (1733) und
(2) J. H. Lambert, Theorie der Parallellinien (1766)
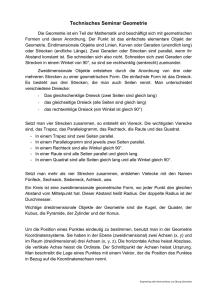
Beide gingen von gewissen Vierecken aus, die sie intensiv studierten. Ihre Ausgangsvierecke
heissen heute
D
C
D
C
A
B
A
B
Saccheri’s Viereck
Lambert’s Viereck
Bezeichnungen:
AB = Basis,
CD = Gipfel,
AD, BC = Arme,
6
6
BAD,
ADC,
6
6
ABC = Basiswinkel
BCD = Gipfelwinkel
Die eingezeichneten Winkel sind rechte Winkel und die beiden Arme AD, BC sind gleich
lang.
Die beiden Vierecke unterscheiden sich also dadurch, daß in Saccheri’s Viereck nur die
beiden Basiswinkel rechte Winkel sind, während Lambert für sein Viereck noch fordert,
daß auch der Winkel 6 ADC ein rechter Winkel ist.
Saccheri hat dann bewiesen
Satz. Die beiden Winkel 6 ADC und
Beweis. siehe unten Satz 29. ♦
6
BCD in Saccheri’s Viereck sind gleich.
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
Wenn nun die Winkel
6
3
ADC, 6 BCD rechte Winkel sind, dann folgt leicht Postulat 5.
Es bleiben also zwei Fälle zu betrachten
Fall 1. Die Winkel
6
ADC, 6 BCD sind stumpf.
In diesem Fall bewies Saccheri, daß
(1) AB > CD
(2) Die Winkelsumme in jedem Dreieck sind immer grösser als zwei Rechte.
(3) Jeder Winkel, der einem Halbkreis eingeschrieben ist, ist stumpf.
Wir betrachten diese Sätze nicht weiter. Saccheri glaubte beweisen zu können, daß sie
zu einem Widerspruch führen. Wir wissen heute, dass Saccheri hier falsch lag. Die Sätze
führen vielmehr zu einer neuen Geometrie. Das wird sofort klar, wenn man nachprüft,
dass die obigen Sätze alle im Modell der sphärischen Geometrie gültig sind. Sie führen
also zur sphärischen Geometrie.
Fall 2. Die Winkel 6 ADC, 6 BCD sind spitz.
Hier bewies Saccherie wieder viele Sätze und er war schliesslich überzeugt, dass sie zu
einem Widerspruch führen. Auch hier lag Saccheri wieder falsch. Dennoch waren viele
Sätze in Saccheries Arbeit völlig richtig bewiesen. Sie waren jedoch sehr ungewöhnlich.
Die Zeitgenossen sahen die schiere Menge von ungewḧnlichen Sätzen und es dämmerte
ihnen zum ersten Mal die Möglichkeit, daß vielleicht Postulat 5 unabhängig ist von den
restlichen Axiomen und daß es vielleicht wirklich eine echte Nicht-Euklidische Geometrie
gibt. Im 18. Jahrhundert waren dies aber sehr ketzerische Gedanken.
Wir kommen nun zur eigentlichen hyperbolischen Geometrie, d.h. wir setzen voraus:
Hyperbolische Parallel Hypothese: Die Gipfelwinkel in Saccheri Vierecken sind
spitze Winkel.
Die Sätze Euklid §1-28 benutzen Postulat 5 nicht. Sie können deshalb für die hyperbolische Geometrie übernommen und benutzt werden. Wir beginnen deshalb die Nummerierung
weiterer Sätze mit der Zahl 29.
Satz 29. Die beiden Gipfelwinkel des Saccheri Vierecks sind gleich.
Beweis.
Betrachte das Saccheri Viereck ♦ABCD.
⇒ ∆ABC und i ∆BAD sind kongruent (Kongruenzsatz SWS).
⇒ AC = BD.
⇒ ∆ADC und ∆BCD sind kongruent (Kongruenzsatz SSS).
⇒ 6 ABC = 6 BCD. ♦
Klaus Johannson, Geometrie (L2)
4
. Geometrie (L2)
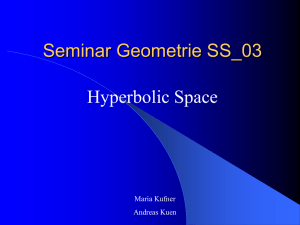
Satz 30. Die Strecke, die die Mittelpunkte von Basis und Gipfel des Saccheri Vierecks
verbinden, steht senkrecht auf Basis und Gipfel.
Basis und Gipfel liegen demnach auf parallelen Geraden, die eine gemeinsame Senkrechte
haben.
F
D
5 6
3
C
4
7 8
1
A
2
B
E
Beweis.
∆AED und ∆BEC sind kongruent (Kongruenzsatz SWS).
⇒ DE = CE, 6 1 = 6 2, 6 3 = 6 4.
⇒ ∆DEF und ∆CEF sind kongruent (Kongruenzsatz SSS)
⇒ 6 5 = 6 6 und 6 7 = 6 8
⇒
5, 6 6 = 90o und weiter
6
6
⇒
6
1 + 6 7,
6
1+6 7=6 2+6 8
2 + 6 8 = 90o .
⇒ EF ist senkrecht zu den Strecken AB und CD.
⇒ AB und CD sind parallel und haben eine gemeinsame Senkrechte. ♦
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
5
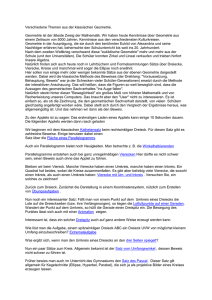
Satz 31. Die Winkelsumme eines Dreiecks ist niemals grösser als zwei Rechte, oder 180o .
B
E
5
4
D
6
3
A
1
2
C
Beweis.
Annahme: Es gibt ein Dreieck ∆ABC mit Winkelsumme 180o + α und α > 0.
Sei D der Mittelpunkt der Strecke BC.
Sei E ein Punkt auf der Geraden durch A, D mit AD = DE.
⇒ ∆BDA und ∆CDE sind kongruent (Kongruenzsatz SWS).
Wir vergleichen jetzt die Dreiecke ∆AEC, ∆ABC und werden zeigen:
(a) sie haben die gleiche Winkelsumme und
(b) 6 CAE oder
6
CEA ist ≤
16
2
BAC.
Um (a) zu beweisen, haben wir
Winkelsumme des Dreiecks ∆AEC = 6 1 + 6 2 + 6 3 + 6 4
=6 1+6 2+6 5+6 6
= Winkelsumme des Dreiecks ∆ABC.
Um (b) zu beweisen, benutzen wir
6
Wenn
6
1 = 6 6, dann ist
6
1,
6
6=
1 + 6 6 = 6 BAC.
16
2
BAC.
16
2
Wenn 6 1 6= 6 6, dann ist 6 1 <
BAC oder 6 6 <
Insgesamt folgt 6 1 ≤ 12 6 BAC oder 6 6 ≤ 21 6 BAC.
16
2
BAC.
Nun ist
6
1 = 6 CAE und
6
6 = 6 CEA
und somit ist (b) bewiesen.
Klaus Johannson, Geometrie (L2)
6
. Geometrie (L2)
O.B.d.A. gilt in (b)
CAE ≤
6
1
6 BAC.
2
Wenn wir nun den gleichen Prozess auf das Dreieck ∆ABC anwenden (d.h. wir nehmen
den Mittelpunkt von EC usw.) dann erhalten wir eine Dreieck ∆AF C mit derselben
Winkelsumme 180o + α und in welchem mindestens einer der Winkel 6 CAF, CF A nicht
grösser ist als 21 CAE.
O.B.d.A. ist
1
6 CAE.
2
CAF ≤
6
Kombinieren wir die beiden Ungleichungen so erhalten wir
6
CAF ≤
1
22
6
BAC.
Wenn wir diesen Prozess n mal anwenden, dann erhalten wir ein Dreieck ∆P QR mit
Winkelsumme 180o + α welches einen Winkel R hat mit
6
R≤
1
2n
6
BAC
Der Winkel auf der rechten Seite kann beliebig klein gemacht werden indem man n beliebig
gross wählt.
Insbsondere kann dieser Winkel kleiner gemacht werden als α.
Wenn dies der Fall ist, dann haben wir
180o + α = 6 P + 6 Q + 6 R < 6 P + 6 Q + α
und so
180o < 6 P + 6 Q.
Dies aber widerspricht der Tatsache, daß die Summe von je zwei Winkeln eines Dreiecks
immer kleiner ist als zwei Rechte (Euklid §17).
Damit ist Satz 31 bewiesen. ♦
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
7
Satz 32. Die Gipfelwinkel eines Saccheri Vierecks ♦ABCD sind nicht stumpf.
Beweis.
Annahme. Die Gipfelwinkel sind stumpf.
⇒ die Winkelsumme des Vierecks ist größer als 360o .
⇒ die Winkelsumme von ∆ABC plus die Winkelsumme von ∆ACD ist zusammen
grösser als 360o .
⇒ Widerspruch zu Satz 31. ♦
Satz 33. In einem Viereck mit Basis, seien die beiden Arme bzgl dieser Basis verschieden
lang. Dann sind auch die Gipfelwinkel verschieden.
Umgekehrt liegt der grössere Gipfelwinkel immer dem grösseren Arm gegenüber.
Beweis. Sei ♦ABCD ein Viereck mit rechten Winkeln bei A und B.
C
D
E
A
B
Hypothese. BC > AD.
Sei E ein Punkt auf BC mit BE = AD.
⇒ ♦ABED ist ein Saccheri Viereck und es gilt
ADE = 6 BED.
6
⇒ es gilt
6
(da die Strecke DE den Winkel
6
ADC > 6 ADE
ADC des Vierecks teilt).
⇒ es gilt
BED > 6 BCD
6
(da
6
BED ein äusserer Winkel von ∆CED ist). Also insgesamt
6
ADC > 6 BCD
⇒ Die Gipfelwinkel sind verschieden. Der grössere der beiden Gipfelwinkel liegt dem
längeren Arm gegenüber.
Klaus Johannson, Geometrie (L2)
8
. Geometrie (L2)
Wir beweisen jetzt die Umkehrung des Satzes.
Hypothese. 6 ADC > 6 BCD.
Die Arme können nicht gleich sein, denn dann wären die Gipfelwinkel gleich (Satz 29).
⇒ 6 AD > 6 BC oder 6 BC > 6 AD.
Die erste dieser Ungleichung kann nicht gelten, da sonst 6 BCD >
ersten Teil des Beweises) und das widerspricht der Hypothese.
6
ADC (nach dem
⇒ BC > AD.
⇒ die Arme sind verschieden lang und der längere Arm liegt dem grösseren Gipfelwinkel
gegenüber. ♦
Satz 34. In einem Saccheri Viereck ist der Gipfel länger als die Basis.
Weiter ist die Strecke, die deren Mittelpunkte verbindet, kürzer als jeder Arm.
Beweis. Betrachte das Saccheri Viereck ♦ABCD mit rechten Winkeln bei A, B.
D
F
A
C
B
E
Seien E, F die Mittelpunkte von Basis und Gipfel.
Dann ist EF senkrecht zu Basis und Gipfel (Satz 30).
Da die Winkel bei C und D spitz sind, haben wir (Satz 33):
AD > EF im Viereck ♦AEF D
und
BC > EF im Viereck ♦EBCF.
Diese Vierecke kann man aber auch so sehen, dass AE, DF und EB, F C Arme sind.
Indem wir wieder Satz 33 benutzen, erhalten wir
DF > AE und F C > EB.
Indem wir diese Ungleichungen kombinieren, erhalten wir
DF + F C > AE + EB und so DC > AB ♦
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
9
Satz 35. Der vierte Winkel in einem Lambert Viereck ist spitz und jede der benachbarten
Seiten ist länger als deren gegenüberliegenden Seite.
Beweis. Sei ♦JKLM ein Lambert Viereck und sei der vierte Winkel bei L.
M
N
L
1 2
P
3
4
K
J
Wir zeigen zunächst das dieser Winkel spitz ist.
Verlägere die Strecke M L bis zu einem Punkt N mit N M = M L.
Sei P die Projektion von N auf die Gerade durch J, K.
Die Dreiecke ∆JM N und ∆JM L sind dan kongruent (nach dem Kongruenzsatz SWS).
Somit ist
JN = JL und 6 1 = 6 2.
Also
6
3=6 4
Die Dreiecke ∆JN P, ∆JLK sind kongruent (nach dem Kongruenzsatz WWS Euclid,
Satz 26).
Es folgt, daß P N = KL und somit ist ♦P KLN ein Saccheri Viereck.
Der Gipfelwinkel 6 KLN dieses Vierecks ist spitz (nach dem hyperbolischen Parallelen
Postulat) ist der vierte Winkel des Lambert Vierecks ♦JKLM .
Um zu zeigen, dass LK > M J kann man nun wie im Beweis von Satz 34 vorgehen. ♦
Satz 36. Wenn zwei Parallelen eine gemeinsame Senkrechte haben, dann können sie keine
zweite gemeinsame Senkrechte haben.
Beweis. Andernfalls gäbe es ein Lambert Viereck in dem der vierte Winkel ein Rechter
wäre. Dies aber widerspricht Satz 35. edemo
Satz 37. Zwei Geraden sind parallel mit gemeinsamer Senkrechte, wenn es eine Transversale gibt welche diese Geraden so schneidet, daß sie gleiche gegenüberliegende Winkel oder
gleiche korrespondierende Winkel bildet.
Beweis. Wir betrachten nur den Fall der gegenüberliegenden Winkel (denn der Fall der
korrespondierenden Winkel geht genauso).
Klaus Johannson, Geometrie (L2)
10
. Geometrie (L2)
Seien g, h zwei Geraden die von einer dritten Gerade t in den Punkten A, B so
geschnitten werden, da ß 6 1 = 6 2:
t
E
B
h
2
C
A
1
g
D
Wenn diese Winkel rechte Winkel sind, dann ist t die gemeinsame Senkrechte von g und
h.
(1) Wenn 6 1, 6 2 spitze Winkel sind, dann sei C der Mittelpunkt von AB und D die
Projektion von C auf g.
Sei E der Punkt auf h, der links von B liegt mit BE = AD.
Die Dreiecke ∆CAD, ∆CBE sind kongruent (nach dem Kongruenzsatz SWS).
Somit ist
6
BEC = 6 ADC und
6
BCE = 6 ACD.
Also ist 6 BEC ein rechter Winkel und C, D, E liegen auf einer Geraden.
Die Strecke DE ist somit eine gemeinsame Senkrechte von g, h.
(2) Wenn 6 1, 6 2 stumpfe Winkel sind, dann sind die anderen gegenüberliegenden inneren
Winkel spitze Winkel und das vorliegende Argument kann wieder angewendet werden. ♦
Satz 38. Wenn zwei Geraden eine gemeinsame Senkrechte haben, dann gibt es Transversale, welche diese Geraden so schneiden, daß sie gleiche gegenüberliegende innere Winkel
(oder gleiche korrespondierende Winkel) bilden.
Die einzigen Transversalen mit dieser Eigenschaft sind diejenigen, die durch den Mittelpunkt der gemeinsamen Senkrechte gehen.
Beweis. Übung. ♦
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
11
Satz 42. Die Winkelsumme in jedem Dreieck ist kleiner als 180o .
Beweis.
Wir beweisen den Satz zunächst für rechte Winkel.
Sei also ∆ABC ein Dreieck mit einem rechten Winkel bei C.
G
B
3
2
D
E
4
1
C
A
F
Sei BD die Strecke durch B mit
6
1=6 2
(1)
Die Strecken AC, BD sind dann parallel mit einer gemeinsamen Senkrechte (Satz 37).
Seien F, G die Endpunkte der gemeinsamen Senkrechte und sei E der Mittelpunkt der
Strecke F G.
Dann liegt E auf der Strecke AB (Satz 38) und ist der Mittelpunkt dieser Strecke
(Übung). Also ist die Position von F G relative zum Dreieck ∆ABC wie im obigen
Diagramm gezeigt.
Wir erhalten also ein Lambert Viereck ♦BCF G in dem 6 CBG ein spitzer Winkel ist
(Satz 35).
Dann folgt (wegen Gleichung (1) von oben), dass
6
1 + 6 3 = 6 2 + 6 3 = 6 CBG = 90o
d.h.
6
Da
6
1 + 6 3 < 90o .
4 ein rechter Winkel ist, erhalten wir
6
1 + 6 3 + 6 4 < 180o
Nun betrachte eine beliebiges Dreieck ∆P QR welches keinen rechten Winkel hat.
Klaus Johannson, Geometrie (L2)
12
. Geometrie (L2)
R
1
2
P
Q
S
Dies Dreieck kann nicht mehr als einen stumpfen Winkel haben (Satz 31) und muß deshalb
zwei spitze Winkel haben. O.B.d.A. seien dies die Winkel bei P und Q.
Sei S die Projektion von R auf die Gerade durch P und Q. Dann liegt S auf der
Strecke P Q (andernfalls erhalten wir einen Widerspruch zu Satz 16).
Die Strecke RS teilt also den Winkel 6 P QR und wir erhalten zwei rechtwinklige Dreiecke
∆P RS, ∆QRS.
Die Winkelsumme in diesen beiden rechtwinkligen Dreiecken ist kleiner als 360o (nach
dem ersten Teil des Beweises).
Wenn man davon die rechten Winkel 6 1 und 6 2 wegläßt erhält man die Winkelsumme
des Dreiecks ∆P QR.
Diese Winkelsumme ist demnach kleiner als 180o . ♦
Satz 43. Es gibt Dreiecke deren Winkelsumme beliebig nahe an 180o liegen.
Beweis. Betrachte das Dreieck ∆ABC und einen variablen Punkt D zwischen A und
B.
C
E
A
D
B
Wenn sich der Punkt D dem Punkt A nähert, dann nähert sich
6 EAC und der Winkel 6 ACD wird beliebig klein.
6
ADC dem Winkel
Die Winkelsumme des Dreiecks ∆ADC kommt demnach dem Wert
beliebig nahe. Dieser Wet ist aber 180o . ♦
6
EAC + 6 CAB
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
13
Satz 44. Die Winkelsumme von jedem (konvexen) Viereck ist kleiner als 360o .
Beweis. Dies folgt sofort aus Satz 42. ♦
Der nächste Satz besagt, dass es in der hyperbolischen Geometrie einen Kongruenzsatz
WWW gibt,
Satz 45. Zwei Dreiecke sind kongruent, wenn ihre Winkel paarweise übereinstimmen.
Beweis.
Im folgende Diagramm seien die folgenden Winkel gleich:
6
ABC = 6 A′ B ′ C ′ ,
6
BAC = 6 B ′ A′ C ′ ,
6
ACB = 6 A′ C ′ B ′ .
C
C’
A’
E
B’
A
D
B
Wir zeigen, dass dann auch die entsprechenden Seiten gleich sind woraus dann der Satz
nach dem Kongruenzsatz SSS folgt.
Angenommen AB > A′ B ′ .
Dann sei D ein Punkt auf AB mit AD = A′ B ′ .
Auf der Strecke AC, und auf derselben Seite von A wie C, sei E ein Punkt mit
AE = A′ C ′ .
Dann sind die Dreiecke ∆A′ B ′ C ′ und ∆ADE kongruent (nach dem Kongruenzsatz
SWS).
Also ist
6 ADE = 6 B und 6 AEF = 6 C.
Es folgt, daß E zwischen A und C liegt. Anderfalls zeigt man leicht, daß ein äusserer
Winkel des Dreiecks gleich ist dem gegenüberliegenden inneren Winkel.
Somit erhalten wir ein Viereck ♦ DBCE dessen Winkelsumme gleich 360o ist. Dies
aber widerspricht Satz 44.
Die Annahme A′ B ′ > AB führt zum selben Widerspruch.
Also ist AB = A′ B ′ und somit sind die Dreiecke ∆ABC und ∆A′ B ′ C ′ kongruent. ♦
Klaus Johannson, Geometrie (L2)
14
. Geometrie (L2)
B. Analytische Hyperbolische Geometrie.
1. Die Komplexen Zahlen.
Die Vektoren (oder Punkte) der Ebene haben eine wichtige algebraische Eigenschaft, die
wir bisher noch nicht gesehen: man kann sie nicht nur addieren, sondern auch mutiplizieren.
Definition. Das Produkt zweier Vektoren u = [a, b], v = [c, d] ist durch folgende Formel
definiert:
ac − bd
ad + bc
c d
a b
c
a
=
·
=
·
−(ad + bc) ac − bd
−d c
−b a
d
b
Die obige Schreibweise haben wir gewählt, damit man sich die Produktformel leichter
merken kann. Wir haben insbesondere
1
0
· [0 1] =
0
1
Wir schreiben nun
Dann ist
0
1
.
und i =
1=
−1
0
a
=a·1+b·i
b
und wir haben die folgende Multiplikationstafel
1
1
i
1
i
i
i
−1
und so
(a + bi) · (c + di) = ac + adi + bci − bd = (ac − bd) + (bc + ad)i.
Wir erhalten also wieder die obige Produktformel. Die Schreibwiese
z = a + bi
heißt Schreibweise als komplexe Zahlen. Es ist die für Produkt Berechnungen die effizientest Schreibweise wie wir gleich im Beweis des nächsten Satzes sehen werden. Wir wollen
deshalt die Schreibweise als komplexe Zahlen im folgenden immer benutzen (man behalte
aber immer im Kopf, dass wir trotz neuer Schreibweise immer Produkte von Punkten in
der Ebene bilden).
Das neue Produkt hat eine wichtige Eigenschaft, die wir aus den reellen Zahlen kennen:
man kann Gleichungen lösen.
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
15
Satz. Die Gleichung
(c + di) · (x + yi) = a + bi
hat immer eine Lösung.
Beweis. Schreibe
x + yi =
ac + bd bc − ad
+ 2
i.
c2 + d2
c + d2
Dann gilt:
ac + bd bc − ad
+ 2
i
(c + di) · (x + yi) = (c + di) ·
c2 + d2
c + d2
ac + bd
bc − ad
ac + bd bc − ad
=c· 2
+
c
·
i
+
di
·
+ 2
di · i
c + d2
c2 + d2
c2 + d2
c + d2
1
(ac2 + bcd + bc2 i − acdi + acdi + bd2 i − bcd + ad2 )
= 2
♦
c + d2
1
= 2
( (a + bi)c2 + (a + bi)d2 )
c + d2
1
= 2
(a + bi)(c2 + d2 )
2
c +d
= a + bi
Definition. Wir schreiben
ac + bd bc − ad
a + bi
:= 2
+ 2
c + di
c + d2
c + d2
Klaus Johannson, Geometrie (L2)
16
. Geometrie (L2)
2. Gebrochen Lineare Transformationen.
Wir wissen, dass man Matrizen mit Vektoren multiplizieren kann. Mit unserem neuen
Produkt können wir durch folgende Formel eine neue Multiplikation definieren. Sei
a b
G=
c d
Dann definiere
G(z) :=
az + b
cz + d
Die Zuordnung z 7→ G(z) definiert eine Transformation
G : C → C, z 7→ G(z)
Sie heißt eine gebrochen lineare Transformation. Dank des neuen Produkt, definiert
also jede Matrix eine (gebrochen lineare) Transformation der (komplexen Zahlen-) Ebene.
Wir wenden uns nun den Eigenschaften dieser Transformationen zu.
Satz. Die Menge der gebrochen linearen Transformationen operiert transitiv auf der
Menge aller paarweise verschiedenen Tripel z1 , z2 , z3 ∈ C.
Genauer: Seien z1 , z2 , z3 ∈ C und z1′ , z2′ ,z3′ ∈ C zwei Tripel von komplexen Zahlen.
a b
∈ Mat2 C mit
Dann gibt es genau eine Matrix G =
c d
G(z1 , z2 , z3 ) = (z1′ , z2′ , z3′ ).
Beweis.
1. Eindeutigkeit.
Seien G, H ∈ Mat2 C zwei Matrizen mit
G(zi ) = zi′ und H(zi ) = zi′ , für alle i = 1, 2, 3
a
b
∈ Mat2 C eine Matrix mit
Dann ist F := H −1 G =
c d
F (zi ) = zi
Also
azi + b
= zi
czi + d
und so
azi + b = zi (czi + d) = czi2 + dzi
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
17
Somit sind z1 , z2 , z3 drei verschiedene Lösungen der quadratischen Gleichung
cz 2 + (d − a)z − b = 0
Daraus folgt aber c, d − a, b = 0. Also wegen
a
1 = det
c
b
= ad − bc
d
haben wir ad = 1 und a = d. Also a2 = d2 = 1 und so a = d = 1. Damit ist
gezeigt, dass F die Einheitsmatirx ist, d.h. H −1 G = F und so G = H. Damit ist die
Eindeutigkeit gezeigt.
2. Existenz.
Betrachte die Gleichung
z − z1 z2 − z3
z ′ − z1′ z2′ − z3′
· ′
=
·
′
′
′
z − z2 z1 − z3
z − z2 z1 − z3
Wenn wir nach z ′ auflösen erhalten wir eine Gleichung
z′ =
az + b
=: G(z)
cz + d
wobei a, b, c, d komlexe Zahlen sind die in z1 , z2, z3 ausgedrückt werden.
Um den Beweis zu beenden beobachte man, dass für die obige Gleichung das folgendes
gilt:
beide Seiten sind = 0, wenn z = z1 und z ′ = z1′ ,
beide Seiten sind = ∞, wenn z = z2 und z ′ = z2′ ,
beide Seiten sind = 1, wenn z = z3 and z ′ = z3′ .
Also ist G(zi ) = zi , für alle i = 1, 2, 3 und damit der Satz bewiesen. ♦
Satz. Gebrochen lineare Transformationen sind winkeltreu.
Insbesondere bilden sie Kreise und Geraden wieder auf Kreise und Geraden ab.
Beweis. siehe [Benke-Sommer] oder [Ford]. ♦
Klaus Johannson, Geometrie (L2)
18
. Geometrie (L2)
3. Das Doppelverhältnis.
Motiviert durch den Beweis im vorigen Paragraphen definieren wir eine neue Zahl:
Definition. Sei (z1 , z2 , z3 , z4 ) ∈ C4 ein Quadrupel von komplexen Zahlen. Dann heißt
die komplexe Zahl
z4 − z1 z2 − z3
DP (z1 , z2 , z3 , z4 ) :=
·
z4 − z2 z1 − z3
das Doppelverhältnis von (z1 , z2 , z3 , z4 ).
Satz. Sei G ∈ SL2 R. Dann erhält G das Doppelverhältnis, d.h. es ist
DP (Gz1 , Gz2 , Gz3 , Gz4 ) = DP (z1 , z2 , z3 , z4 ).
Beweis. Die Transformation G ist durch G(zi ) = zi , i = 1, 2, 3 eindeutig bestimmt.
Somit ist es durch die Gleichung im vorigen Beweis gegeben. Insbesondere gilt die Gleichung für z = z and z ′ = Gz. Die beiden Seiten dieser Gleichung sind aber gerade das
Doppelverhältnis. ♦
Satz. Die linearen Transformationen bilden Geraden und Kreise auf Geraden und Kreise
ab (evtl. aber auch eine Gerade in einen Kreis).
Beweis. Übung. ♦
Korollar. Das Doppelverhältnis der (korrespondierenden) Schnittpunkte in den folgenden
beiden Geraden g, h sind gleich:
1’
2’
1
3’
2
4’
3
4
g
h
Doppelverhältnisse sind gleich
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
19
Beweis.
Zum Beweis beachte man, dass es eine gebrochen lineare Transformation gibt die je drei
Punkte auf drei andere, frei gewählte Punkte abbildet.
Weiter werden Geraden auf Geraden abgebildet.
Somit folgt das Korollar aus dem vorigen Satz, dass gebrochen lineare Transformationen
Doppelverhältnisse erhalten. ♦
Korollar. Seien p, q, r, s ∈ C vier paarweise verschiedene Punkte. Dann gibt es genau
eine gebrochen rationale Abbildung G mit
G(p) = 0, G(q) = 1, G(r) = ∞
Dann ist
λ = G(s) = DP(p, q, r, s)
das Doppelverhältnis
p, q, r, s. ♦
Korollar. Das Doppelverhältnis der Punkte 0, ai, bi, ∞ auf der y-Achse lautet
a ♦
DV(0, ai, bi, ∞) = a − b
Korollar. Seien z1 , z2 ∈ H2 und seien a, b die Endpunkte des Halbkreises durch z1 , z2 .
Danni ist das Doppelverhältnis DV(a, z1 , b, z2 ) eine reelle Zahl. ♦
Klaus Johannson, Geometrie (L2)
20
. Geometrie (L2)
4. Hyperbolische Grundobjekte und Hyperbolische Grundgrössen.
(A) Das Modell der oberen Halbene, H2 .
Der Grundraum der hyperbolischen Geoetrie ist gegeben durch
Grundraum := H2 := { z ∈ C | |z| < 1 },
d.h. durch das Innere der Einheitsscheibe in R2 .
Die Grundobjekte jeder 2-dimensionalen Geometrie sind Punkte und Geraden (=
Geodätische) und Kreise im Grundraum.
• In der hyperbolische Geometrie sind diese Grundobjekte wie folgt definiert:
Punkt :=Punkt in der offenen, oberen Halbebene H
Geodätische :=Halbkreise mit Mittelpunkt in der x-Achse und
Halbgeraden senkrecht zur x-Achse.
• Der Abstand in der hyperbolischen Geometrie.
Definition. Der hyperbolische Abstand zweier Punkte u, v ∈ H ⊂ C ist gegeben
durch
d(u, v) = ln |DP (a, u, v, b)|
wobei a, b die beiden Endpunkte der Geodätischen durch u, v sind.
Bemerkung. Der Grund warum hier der Logarithmus auftaucht ist der folgende Satz,
d.h. ohne Logarithmus würde der Abstand nicht die Minimal Eigenschaften einer Metrik
haben.
Satz. Es gilt:
(1) d(z1 , z2 ) = 0 ⇔ z1 = z2 .
(2) d(z1 , z2 ) = d(z2 , z1 )
(3) d(z1 , z3 ) ≤ d(z1 , z2 ) + d(z2 , z3 )
Beweis. Nachrechnen. ♦
• Der hyperbolische Winkel ist der Euklidische Winkel, den die Schenkel des Winkels
bilden.
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
21
Bemerkung. Wir haben nun alle hyperbolischen Grundobjekte und Grundgrößen zusammen und könnten jetzt die hyperbolische Geometrie entwickeln, etwa so wie wir die sphärische Geometrie behandelt haben. Wir wollen dies aber so hier nicht tun, sondern zuerst
einen alternativen Zugang zur hyperblischen Geomtrie einführen.
(B) Das Modell der Einheitsscheibe, D2 .
Es gibt neben dem Modell H2 der oberen Halbene noch andere Modelle, etwa das projektive Modell (indem all Geodätische Euklidische Geraden), das Modell der Einheitsscheibe, man kann auch die hyperbolische Geometrie als Einheitssphäre im Minkowski
Raum beschreiben usw. Hier gehen wir noch kurz auf das Modell der Einheitsscheibe
ein. Hier haben wir:
Der Grundraum der hyperbolischen Geometrie ist gegeben durch:
Grundraum := { D2 = { z ∈ C | |z| < 1 }
d.h. durch das Innere der Einheitsscheibe in der komplexen Zahlenebene C.
• Die Grundobjekte sind gegeben durch:
Punkte :=Punkte in der offenen Einheitsscheibe
Geodätische :=Schnitt von D mit Kreisen senkrecht
:=zum Rand ∂ D von D.
• Der Abstand von zwei Punkten u, v ∈ D ist gegeben durch den Logarithmus des
Doppelverhältnisses von u, v und den Endpunkten der Geodätischen durch u, v.
• Der Winkel zweier Geodätischen mit Schnittpunkt u ist gegeben durch den Euklidischen Winkel der Tangenten der beiden Geodätischen an der Stelle u.
(C) Der Rand der hyperbolischen Ebene.
Man bemerke, dass die Modelle der hyperbolischen Ebene beide einen ”Rand” haben. Der
Rand der oberen Halbebene ist gegeben durch
∂H2 := R ∪ {∞}.
Der Rand der Einheitsscheibe ist gegeben durch
∂D2 := { z ∈ C | |z| = 1 }.
Der Rand selbst gehört selbst nicht zur hyperbolischen Ebene ist aber für die hyperbolische
Geometrie sehr wichtig.
Klaus Johannson, Geometrie (L2)
22
. Geometrie (L2)
Ein Beispiel. Eine Folge von Dreiecken muß in der Euklidischen Geometrie keine konvergente Teilfolge haben. Sie hat aber immer eine konvergente Teilfolge in der sphärischen
Geometrie. In der hyperbolischen Geometrie aber nur dann, wenn man den Rand hinzunimmt. In diesem Fall können die Teilfolgen zu Dreiecken konvergieren, die nicht eigentlich
zur hyperbolischen Geometrie gehören. Man nennt sie ”ideale Dreiecke”.
Definition. Ein Dreieck in einem Modell der hyperbolischen Geometrie ist ein ideales
Dreieck, wenn alle seine Ecken im Rand liegen.
Beispiele.
∞
Ideale Dreiecke im Modell der oberen Halbebene
Bemerkung. Die Winkel von idealen Dreiecken sind alle gleich 0 Grad.
Bemerkung. Die Existenz von Modellen hat sehr zu der Überzeugung beigetragen,
daß es die hyperbolische Geometrie wirklich gibt. Modelle sind auch sehr nützlich für
technische Fragen. Z.B. helfen sie zu vertehen warum es zwei Typen von Parallelen gibt:
solche die eine gemeinsame Senkrechte haben und solche die nicht.
Kriterium: Parallelen die keinen gemeinsamen Punkt im Rand haben, haben eine gemeinsame Senkrechte (siehe später für die Kostruktion) und die anderen nicht.
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
23
5. Die Hyperbolischen Transformationen - das Kleinsche Programm.
In diesem Abschnitt behandeln wir die Grundzüge des ”Kleinschen Programms”. Die
Grundidee des Kleinschen Programms ist etwas subtil. Sie besteht darin eine Geometrie
nicht durch ein Axiomensystem zu definieren. Nach Klein wird eine Geometrie vielmehr
durch ihre zugehörige Gruppe G definiert. Dabei ist G eine Gruppe die auf dem
Grundraum operiert - also z.B R2 , S 2 , H2 , aber auch R3 , R4 , . . . usw.
Im Falle der hyperbolischen Geometrie definieren wir:
Definition. Die hyperbolische Gruppe ist die Gruppe
PSL2 R := { G ∈ Mat2 R | det(G) = 1 },
aber nicht bzgl. ihrer linearen Operation auf R2 , sondern bzgl. ihrer gebrochen linearen
Operation auf C:
z 7→ G(z) = (az + b)/(cz + d).
Ausgehend von dieser Gruppe definieren wir Grundobjekte und Grudgrößen der hyperbolischen Geometrie neu:
Bemerkung. Man bemerke, dass G(x) ∈ R, für alle real numbers x ∈ R ∈ C, d.h. die
x-Achse wird erhalten. Somit operiert die hyperbolische Gruppe auf der oberen Halbebene.
• In der hyperbolischen Geometrie (nach Klein) sind die Grundobjekte wie folgt definiert:
Punkte :=die Punkte der (offenen) oberen Halbebene.
Geodätische :=der Grundstrahl sowie alle Bilder des Grundstrahles
unter der Operation der hyperbolischen Gruppe.
wobei der Grundstrahl der Schnitt der y-Achse mit der oberen Halbebene ist.
Bemerkung. Da die hyperbolische Gruppe Kreise auf Kreise abbildet, folgt, dass die
Geodätischen genau die Halbkreise sind, die senkrecht auf der x-Achse stehen.
• Wir kommen nun zum hyperbolischen Abstand.
Definition. Der hyperbolische Abstand dh (x, y) ist gegeben durch
(1) dh (i, ai) := ln |a|.
(2) dh (x, y) := dy (G−1 (x), G−1 (y)),
Klaus Johannson, Geometrie (L2)
24
. Geometrie (L2)
wobei G ∈ Mat2 R die Transformation ist, die i auf x abbildet und die y-Achse auf
den durch x, y gehenden oberen Halbkreis.
• Der hyperbolische Winkel zwischen zwei Geodätischen ist der Euklidische Winkel
zwischen den korrespondierenden Tangenten an diese Geodätische.
Der folgende ”Satz” ist eine tautologische Konsequenz aus den Definitionen.
Satz. Die Transformationen der hyperbolischen Gruppe sind längen- und winkelerhaltend.
♦
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
25
6. Typen von Transformationen der hyperbolischen Geometrie:
a
Definition. Sei A =
c
b
∈ Mat2 R eine Matrix und sei Spur(A) = a + d ihre Spur.
d
(1) A heißt hyperbolisch, wenn Spur(A) > 2
(2) A heißt parabolisch, wenn Spur(A) = 2
(3) A heißt elliptosch, wenn Spur(A) < 2.
Satz. Sei A ∈ Mat2 R und GA die durch A gegebene gebrochen rationale Transformation. Dann gilt:
(1) GA hat genau zwei Fixpunkte wenn A hyperbolisch.
(2) GA hat genau einen Fixpunkt, und der liegt in der x-Achse, wenn A parabolisch.
(3) GA hat genau einen Fixpunkt, und der liegt nicht in der x-Achse, wenn GA elliptisch.
Beweis. Man löst, die Gleichung GA (z) = z. Dies ist eine quadratische Gleichung und
der Satz folgt leicht aus der Lösungsformel für quadratische Gleichungen. ♦
Die weiteren dynamischen Eigenschaften, der durch GA gegebene Bewegungen findet man
im folgenden Diagramm:
Klaus Johannson, Geometrie (L2)
26
. Geometrie (L2)
Dynamik der Transformationen der hyperbolischen Ebene.
Hyperbolische Transformation = Translationen
Elliptische Transformationen = Drehungen
Parabolische Transformationen = Scherungen
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
27
7. Hyperbolische Geodätische.
Satz. Sei g eine hyperbolische Geodätische und sei P ein Punkt der nicht auf g liegt.
Dann gibt es unendliche viele verschieden Geodätische, die parallel sind zu g, d.h. die
g nicht schneiden.
Beweis. ♦
Satz. Seien g, h zwei disjunkte, hyperbolische Geodätische. Dann gibt es genau eine
Geodätische, die g und h senkrecht schneidet.
Beweis.
im Modell der oberen Halbebene.
Geodätische im Modell der oberen Halbebene sind Halbreise mit Mittulpunkt in der xAchse. Demnach folgt der Satz sofort aus dem früher bewiesenen Satz der Euklidischen
Geometrie: Je zwei disjunkte Kreise (mit Mittelpunkt auf der x-Achse), haben genau einen
Kreis (mit Mittelpunkt auf der x-Achse), die beide Kreise senkrecht scheiden. ♦
im Modell der Einheitsscheibe.
Sei
G(z) =
1
.
z−1
Dann ist G(z) eine Isometrie, die das Modell der oberen Halbene auf das Modell des
Einheitskreises abbildet.
Die beiden Geodätischen g, h gehen dabei in Geodätische g ′ , h′ des Models des Einheitskreises über, sind also durch Kreise senkrecht zum Einheitskreis gegeben.
O.B.d.A. können wir annehmen, dass die Geodätischen g ′ , h′ symmetrisch zur x-Achse
liegen, denn es gibt immer eine hyperbolische Transformation, die diese Position erreicht
(siehe Dynamik der hyperbolischen Transformation im vorigen Abschnitt),
Dann ist klar, dass die x-Achse die eindeutig gegebene Geodätische ist, die senkrecht steht
auf g ′ und h′ .
Entsprechend ist das Bild der x-Achse unter (GH)−1 die eindeutig gegeben Geodätische
(im Modell der oberen Halbebene), die senkrecht steht auf den ursprünglich gegebenen
Geodätischen g, h. ♦
Klaus Johannson, Geometrie (L2)
28
. Geometrie (L2)
8. Hyperbolische Dreiecke.
In diesem Abschnitt wollen wir den Flächeninhalt von hyperbolischen Dreiecken bestimmen. In der Regel legt man einen Flächeninhalt dadurch fest indem man zunächst einen
”Standard Flächeninhalt” festlegt. In der Euklidischen Geometrie gibt es keinen kanonischen Standard. Hier behilft man sich indem man willkürlich ein Quadrat als ”Standard
Einheitsquadrat” festlegt. In der sphärischen und in der hyperbolischen Geometrie gibt
es keine Quadrate. Es gibt aber kanonische Dreiecke, die man als Standards verwenden
kann. In der vorigen Vorlesung konnten wir z. B. den Flächeninhalt eines spärischen
Dreiecks dadurch bestimmen indem wir als Standard Flächeninhalt den Flächeninhalt der
Einheitssphäre festlegten, dessen Mass wir mit 4π normierten. Das Standard Dreieck
der sphärischen Geometrie ist das Dreieck dessen Winkel alle Rechte Winkel sind. Dieses
Dreieck hat das Mass π2 (da die Sphäre die Summe von 8 solchen Dreiecken ist). Eine
entsprechende Strategie wollen wir auch im Falle von hyperbolischen Dreiecken verfolgen.
Wir werden sehen, dass es auch hier ein Standard Dreieck gibt, nämlich das sog. ”ideale
Dreieck”, d.h. das Dreieck dessen Winkel alle = 0 sind.
Definition. Ein hyperbolisches Dreieck ist ein Dreieck in der hyperbolischen Ebene,
dessen drei Seiten aus geodätischen Strecken bestehen.
• Dreiecke mit 3 idealen Ecken (= Ideale Dreiecke)
Um den hyperbolischen Flächeninhalt F (P ) von hyperbolischen Polygonen einzuführen normieren wir.
F (∆) = π, für alle idealen Dreiecke ∆.
Bemerkung.
(1) Ein hyperbolisches Dreieck der oberen Halbebene H heißt ideales Dreieck, wenn
alle Ecken von ∆ auf der x-Achse liegen.
(2) Man zeigt leicht, dass je zwei ideale Dreiecke isometrisch sind, so dass die obige Definition wohldefiniert ist.
(3) Ideale Dreiecke haben den grösstmöglichen Flächeninhalt, denn jedes Dreieck liegt in
mindestens einem idealen Dreieck.
• Dreiecke mit 2 idealen Ecke.
Es gilt:
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
h1
h2
29
h3
D
α
g
A
0
B
α
C
Flächeninhalt eines nicht-idealen Dreiecks
Wenn es um die Bestimmung des Flächeninhaltes des hyperbolischen Dreiecks ∆h (A, b, ∞)
geht, liegt es nahe das Verhältnis der hyperbolischen Flächen
Fh (∆h (A, B, ∞) : Fh (∆h (A, C, ∞)
gleich dem Verhältnis
Fe (∆K (A, 0, B)) : Fe (∆K (A, B, C))
der Euklidischen Flächeninhalte der Kreisbogenabschnitte
∆K (A, 0, B) und ∆K (A, B, C).
Da der Kreis den Euklidischen Flächeninhalt πr2 hat, ist dieses Verhälnis gleich
(π − α) : π
Da der hyperbolische Flächeninhalt des idealen Dreiecks ∆h (A, C, ∞) zu π normiert
ist, folgt
Fh (∆h (A, B, ∞)) = π − α
Damit ist der Flächeninhalt von jedem hyperbolischen Dreieck mit zwei idealen Ecken
gleich
F =π−α
wobei α der Euklidische (= hyperbolische) Winkel an der nicht-idealen Ecke ist.
Klaus Johannson, Geometrie (L2)
30
. Geometrie (L2)
• Dreiecke mit 1 idealen Ecke.
In der gleichen Weise zeigt man, dass der hyperbolische Flächeninhalt eines hyperbolisches
Dreiecks mit nur einer idealen Ecke gleich ist:
F =π−α−β
wobei α, β die Winkel an den beiden nicht-idealen Ecken sind.
• Dreiecke mit 0 idealen Ecken.
Jetzt können wir den hyperbolischen Flächeninhalt eines beliebigen hyperbolischen Dreiecks bestimmen.
Satz. Sei ∆(A, B, C) ein hyperbolisches Dreieck. Dann gilt:
F (∆) = π − (α + β + γ).
Beweis.
Der Satz gilt für alle Dreiecke mit mindestens einer idealen Ecke. Also sei ∆h (A, B, C)
ein hyperbolisches mit keiner idealen Ecke.
Wir verlängern den geodätischen Bogen AB zum geodätischen Bogen AC wobei C ein
idealer Punkt ist. Dann sind
∆h (A, C, D und ∆h (B, C, D)
zwei ideale Dreiecke mit einem idealen Punkt.
Weiter ist
∆h (A, B, C) = ∆h (A, C, D) − ∆h (B, C, D)
und somit gilt für den hyperbolischen Flächeninhalt
F (∆h (A, B, C) = F (∆h (A, C, D)) − F (∆h (B, C, D))
= (π − α − (γ + θ)) − (π − θ − (π − β))
= π − α − β − γ,
denn der Winkel bei D ist gleich 0. Dies beweist den Satz.
Für einen analytischen Beweis siehe [Siegel] oder [Behnke-Sommer]. ♦
Bemerkung. Da alle Polygone in Dreiecke zerlegt werden können, kann man mit obiger
Formel im Prinzip den Flächeninhalt aller hyperbolischen Polygone bestimmen.
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
31
9. Hyperbolische Parkettierungen.
Es gibt in der Euklidischen Geometrie nur wenige Polygone mit denen man die Ebene parkettieren kann (d.h. überlappungsfrei auslegen). Das gleichseitige Dreieck, das Quadrat,
der Rhombus und das Sechseck sind alle Beispiele. Die Winkelsumme in allen anderen
regelmässigen Polygonen (= konvex und alle Seiten gleichlang) ist grösser als 360o .
Eine der bemerkenswerten Eigenschaften der hyperbolischen Ebene ist die Tatsache, dass
die hyperbolische Ebene (im Gegensatz zur Euklidischen) Ebene mit allen regelmässigen
Polygonen parkettiert werden kann.
Satz. Die hyperbolische Ebene kann mit allen regelmässigen hyperbolischen Polgonen
parkettiert werden.
Beweis. Die Existenz von Parkettierungen durch regellmässige Polygone mit beliebig
vielen Seiten sieht man mit folgendem Trick.
Die obige Kachel kann man durch Ausdehnung größer oder kleiner machen. Die Summe
der Innenwinkel wird sich dabei verändern. Sie geht von 3600 (für ganz kleine Kacheln)
bis 00 für sehr große Kacheln. Es gibt nach dem Zwischenwertsatz also immer eine Kachel
deren Innenwinkel sich zu 3600 aufaddieren.
Man sieht aber leicht (durch Anlegen der Kacheln), dass sich die hyperbolische Ebene
immer durch alle regelmässigen Polygone mit Innenwinkelsumme = 2π parkettieren lässt.
♦
Beispiel. Hier ist Escher’s Version einer Parkettierung der hyperbolischen Ebene durch
Kachel mit 5-Ecken:
Klaus Johannson, Geometrie (L2)
32
. Geometrie (L2)
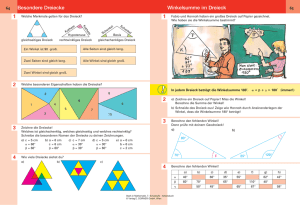
Beispiel. Parkettierungen durch Dreiecke heißen auch Triangulationen. Hier ist eine
solche Triangulation der hyperbolischen Ebene durch ideale Dreiecke.
2
1
3
_13
_8
_1
_3
_
-_3 3
1
7
5 -_
-8 -_ 3
2
-_2 4
1
-_8
-_5 5
-_7 3
1
5
5_
5
4
_1 =-1
_
0 0
_4
1
_10 7
3 _ _11
2 3
1_2
5_
3
13
11
_ 8_ _
7 5 8
_3
2
_11 _7 _10
8 5 7
_4
3
_6 5
5 _ _9
4 7
1
1 -_
-2 -_ 5
4
1_
4
_4 3
11 _ _5
8 1
3
_2
5
_5 _3 _4
12 7 9
_1
2
3_
5
5_ 4_ 7_
9 7 12
2_
7_
8_ 5_ 11
13 8
7_
5_
10
3_
8_
11
7
1
5
6
_5
9
_1
9
2_
5
_7
1_
6
_4
1_
1
_1
0_
_3
11 _2
7 _3
10
3
Figure 9.1
1
4
_-4 5 _3 -5
4
9_
1_2 7_ 5
7 4
2_
-
_5
_-1
9_
_-4
7_
3
_-7
3
2
-_3
5
4
1
_
_
_ -1 7
-3
7 -2 _-5 _-3 -4
_ -3
_
_
_ -2
_
-1
8 5 7 _
7 5 8
3
3
2
F
4
3
Das rechte Bild ist die Einheitsscheibe in R2 und damit das Modell der hyperbolischen
Ebene. Das linke Bild ist die Euklidische Ebene. Die Gitterpunkte (a, b), a, b ∈ Z,
der linken Ebene mit ggT (a, b) = 1 werden mit der Abbildung (a, b) → √a21+b2 auf
den Einheitskreis abgebildet. Wir verbinden zwei rationale Zahlen (a, b), (c, d) auf dem
Einheitskreis mit einem Bogen in der Einheitsscheibe genau dann wenn
a c
=1
det
b d
Klaus Johannson, Geometrie (L2)
§9 Hyperbolische Geometrie
33
und erhalten das Bild auf der rechten Seite.
Das Erstaunliche ist, dass sich keine der Bögen überschneidet. Weiter ist erstaunlich, dass
die Operation der ganzzahligen Matrizen durch gebrochen rationale Transformationen diese
ganze Triangulation respektiert, d.h. keine solche gebrochen rationale Transformation wird
diese kombinatorische Struktur je verändern.
Dies ist nur eine der vielen faszinierenden Sachen, die man mit der hyperbolischen Ebene
machen kann.
Literatur:
A.F. Beardon, The geometry of discrete groups, Springer Verlag
H. Behnke-F. Sommer, Theorie der Analyischen Funktionen, Springer Verlag
L.R. Ford, Automorphic Functions, Chelsea
David Gans, An introduction to non-Euclidean geometry, Academic Press (1973)
F. Klein, Vorlesungen über nicht-euklidische Geometrie, Springer Verlag
C. L. Siegel, Topics in Complex Function Theory II, Wiley-Interscience (1969)
Klaus Johannson, Geometrie (L2)