Einführung in die Plasmaphysik
Werbung

Einführung in die Plasmaphysik
Felix Spanier
2. Juli 2008
Inhaltsverzeichnis
Vorwort
5
0 Literaturhinweise
7
1 Was ist Plasma?
1.1 Wo gibt es Plasma . . . . . . . . . . . . . . .
1.2 Definition eines Plasmas . . . . . . . . . . . .
1.2.1 Exkurs: Temperatur . . . . . . . . . .
1.2.2 Debye-Abschirmung . . . . . . . . . .
1.2.3 Plasmaparameter . . . . . . . . . . . .
1.2.4 Kriterien für Plasmen . . . . . . . . .
1.3 Verschiedene Plasmen . . . . . . . . . . . . .
1.3.1 Gasentladung . . . . . . . . . . . . . .
1.3.2 Leuchtstoffröhre . . . . . . . . . . . .
1.3.3 Kernfusion . . . . . . . . . . . . . . .
1.3.4 Weltraumphysik . . . . . . . . . . . .
1.3.5 Astrophysik . . . . . . . . . . . . . . .
1.3.6 Technische Niedertemperaturplasmen
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
9
9
9
10
11
12
12
13
13
14
14
14
14
15
2 Einzelteilchen
2.1 Gleichförmiges E- und B-Feld . . .
2.1.1 E=0 . . . . . . . . . . . . .
2.1.2 Endliches E . . . . . . . . .
2.1.3 Gravitationsfeld . . . . . .
2.2 Ungleichförmiges B-Feld . . . . . .
2.2.1 Grad-B-Drift . . . . . . . .
2.2.2 Krümmungsdrift . . . . . .
2.2.3 Magnetische Spiegel . . . .
2.3 Ungleichförmiges E-Feld . . . . . .
2.4 Zeitlich variierendes E-Feld . . . .
2.5 Zeitlich variierendes B-Feld . . . .
2.6 Adiabatische Invarianten . . . . . .
2.6.1 Das magnetische Moment µ
2.6.2 Die longitudinale Invariante
2.6.3 Der magnetische Fluß Φ . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
17
17
17
18
19
19
19
20
21
24
25
26
27
27
27
28
3 Fluidbeschreibung
.
.
.
.
.
.
.
.
.
.
.
.
.
J
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
29
3
Inhaltsverzeichnis
3.1
3.2
3.3
3.4
Elektromagnetische Beschreibung von Plasmen .
3.1.1 Klassische Beschreibung von Dielektrika .
3.1.2 Die dielektrische Konstante eins Plasmas
Fluidgleichungen . . . . . . . . . . . . . . . . . .
3.2.1 Die konvektive Ableitung . . . . . . . . .
3.2.2 Der Stresstensor . . . . . . . . . . . . . .
3.2.3 Kontinuitätsgleichung . . . . . . . . . . .
3.2.4 Zustandsgleichung . . . . . . . . . . . . .
3.2.5 Vollständiger Gleichungssatz . . . . . . .
Fluiddrift senkrecht zum Magnetfeld . . . . . . .
Fluiddriften parallel zum Magnetfeld . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Wellen in Plasmen
4.1 Plasmaoszillationen . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Elektronen Plasmawellen . . . . . . . . . . . . . . . . . . . . .
4.3 Schallwellen . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Ionen-Schallwellen . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Elektrostatische Oszillationen senkrecht zum Magnetfeld . . .
4.6 Elektrostatische Ionenwelllen senkrecht zu B . . . . . . . . . .
4.7 Elektromagnetische Wellen ohne Hintergrundmagnetfeld . . .
4.8 Elektromagnetische Wellen senkrecht zum Hintergrundfeld . .
4.8.1 Ordinary Wave . . . . . . . . . . . . . . . . . . . . . .
4.8.2 Extraordinary Wave . . . . . . . . . . . . . . . . . . .
4.9 Cut-Off und Resonanz . . . . . . . . . . . . . . . . . . . . . .
4.10 Elektromagnetische Wellen parallel zum Hintergrundfeld . . .
4.11 Fluidansatz . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.11.1 Dispersionsrelation im kalten, magnetisierten Plasma .
4.11.2 Dispersionsrelation im warmen, magnetisierten Plasma
5 Kinetische Theorie
5.1 Hamilton-Beschreibung . . . . . . . . . . . . . . . . . . .
5.2 Mikroinstabilitäten . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Langwellen-Näherung . . . . . . . . . . . . . . . .
5.2.2 Landau-Dämpfung . . . . . . . . . . . . . . . . . .
5.3 Welle-Teilchen-Wechselwirkung . . . . . . . . . . . . . . .
5.4 Herleitung der MHD-Gleichung aus der Vlasov-Gleichung
5.4.1 Momentenbildung . . . . . . . . . . . . . . . . . .
5.5 Stix-Parameter in der kinetischen Beschreibung . . . . . .
6 Instabilitäten
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
29
30
30
31
31
32
34
34
34
35
36
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
39
39
40
41
42
44
45
46
47
47
48
49
49
50
52
53
.
.
.
.
.
.
.
.
55
55
58
59
61
64
67
67
70
71
Vorwort
5
Vorwort
6
0 Literaturhinweise
Dieses Skript orientiert sich vornehmlich an
Chen, F.: Introduction to Plasma Physics
Außerdem finden sich einige Hinweise auf
Krall/Trievelpiece: Fundamentals of Plasma Physics
Lesenswert sind außerdem:
Kirk, J.: Astro Plasmaphysics
Schlickeiser, R: Cosmic Ray Astrophysics
Boyd/Sanderson: Fundamental Plasma Physics
7
0 Literaturhinweise
8
1 Was ist Plasma?
Plasma wird gemeinhin als der vierte Aggregatszustand bezeichnet. Auch wenn diese
Bezeichnung eher unphysikalisch ist, zeigt sie dennoch, daß ein Plasma ein anderes Verhalten aufweist als zum Beispiel ein Gas.
1.1 Wo gibt es Plasma
Wenn man Dunkle Materie und Dunkle Energie außer acht läßt, kann man grob annehmen, daß fast 99% der gesamten Materie als Plasma vorliegen. Dies liegt im wesentlichen
daran, daß Sterne nahezu vollständig als heiße, ionisierte Materie vorliegen und auch interstellare Gasmassen einen hohen Ionisationsgrad aufweisen. Im Alltag begegnen uns
zwar auch Plasmen, aber unsere Umwelt weist im wesentlichen keine Plasmen auf. Woran
liegt das? Schauen wir uns die Saha-Gleichung an:
ni
T 3/2 −Ui /kB T
' 2.4 × 1021
e
nn
ni
(1.1)
Diese Gleichung beschreibt den Ionisationsgrad eines Gases bei der Temperatur T . Dabei
ist Ui das Ionisationspotential des Gases. Für die Werte von Stickstoff bei Raumtemperatur (Ui = 14.5 eV) kann man ausrechnen
ni
' 10−122
nn
(1.2)
Man kann also davon ausgehen, daß die Raumluft praktisch nicht ionisiert ist.
Was folgt aus der Saha-Gleichung? Hohe Temperaturen führen zu einem hohen Ionistaionsgrad, da schnelle Teilchen leichter Elektronen entfernen können. Natürlich hängt
das vom Ionisierungspotential ab. Allerdings führt eine hohe Dichte von geladenen Teilchen auch zu einer höheren Rekombonationsrate.
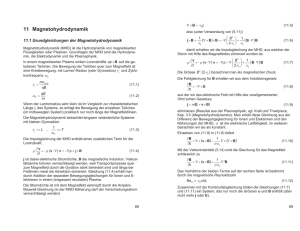
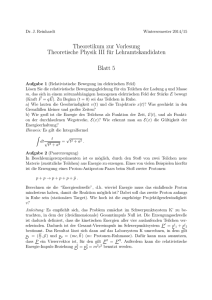
Plasmen existieren bei einer großen Zahl von verschiedenen Temperaturen und Dichten
(Bild 1 zeigen)
1.2 Definition eines Plasmas
Ionisation ist zwar toll, aber bei weitem nicht ausreichend für die Definition eines Plasmas. Die weitverbreitete Defininition lautet
Ein Plasma ist ein quasineutrales Gas aus geladenen und neutralen Teilchen, das ein
kollektives Verhalten aufweist
9
1 Was ist Plasma?
Hier werden in der Definition erst einmal natürlich viele neue Begriffe eingeführt, die
noch einer Erklärung bedürfen.
Wenden wir uns zuerst der Quasineutralität zu. In Gasen wirken auf Atome praktisch
keinerlei Kräfte. Die Übertragung von Kräften findet ausschließlich über Stöße zwischen
Atomen statt. Deswegen findet man in Gasen auch keine langreichweitigen Kräfte.
In Plasmen findet man hingegen geladenen Teilchen. Diese Teilchen erzeugen positive und negative Ladungskonzentrationen im Plasma, die wiederum elektrische Felder
erzeugen können. Bewegte Teilchen führen weiterhin zu magnetischen Feldern. Die so erzeugten Felder wirken dann wieder auf die Bewegung der Teilchen. Die wirkenden Kräfte
fallen zwar mit r−2 ab, aber gleichzeitig nimmt die Masse des wirkenden Plasmas zu.
Für einen gegebenen Raumwinkel sogar mit r3 .
Die langreichweitigen Coulomb-Kräfte eröffnen völlig neue Möglichkeiten der kollektive Bewegung. Insbesondere in sogenannten stoßfreien Plasmen, dominieren diese Kräfte
1.2.1 Exkurs: Temperatur
Im folgenden wird in der Regel angenommen, daß Teilchen, die sich im thermischen
Gleichgewicht befinden, der Maxwell-Gleichung gehorchen. Das H-Theorem sagt auch
diese Verteilung für kollisionsbestimmte Gase voraus. Ein-dimensional liest sich die Verteilung als
1
f (u) = A exp(− mu2 /kB T )
(1.3)
2
kB = 1.38 · 10−23 J/K ist die Boltzmann-Konstante. Aus der Verteilung kann man nun
die Teilchenzahl ermitteln
Z ∞
f (u)du
(1.4)
n=
−∞
und somit die Normierungskonstante A berechnen
r
m
A=n
2πkB T
(1.5)
Analog bestimmt sich die mittlere Energie
R∞ 1
Ē =
2
−∞ 2 mu f (u)du
R∞
−∞ f (u)du
Wählt man nun
r
vth =
erhält man
2kB T
m
(1.6)
(1.7)
1
(1.8)
Ē = kB T
2
Man kann sich leicht davon überzeugen (Übung!), daß im n-dimensionalen ergibt
n
Ē = kB T
(1.9)
2
Es ist in der Plasmaphysik üblich, die Temperaturen in eV anzugeben, mit kB T = 1 eV
entspricht T = 11600 K
10
1.2 Definition eines Plasmas
1.2.2 Debye-Abschirmung
Eine fundamentale Eigenschaften von Plasmen ist ihre Fähigkeit, elektrische Felder abzuschirmen. Wenn man Kugeln, zwischen denen ein Potential herrscht, in ein Plasma
taucht, so werden diese Kugeln von den freien Ladungen des Plasmas umgeben. Dadurch
entsteht eine sehr gute Abschirmung, da die positive geladene Kugel von Elektronen umgeben wäre und umgekehrt.
In einem kalten Plasma, in dem die einzelnen Teilchen also keine thermische Bewegung
haben, stellt sich die Lage sehr einfach dar: Die Abschirmung wäre perfekt und jede
Kugel hätte eine Nettoladung von 0. Da in einem warmen Plasma aber die Teilchen
noch thermische Energie haben liegen die Ladungen nicht dicht an der Kugel, sondern
bilden eine Wolke. Am Rand der Wolke haben elektrisches Potential und thermische
Energie dieselbe Größenordnung und die Teilchen können fliehen. Durch Ausbildung
solcher Wolken ist die Abschirmung nicht perfekt und es können kleinskalige Felder
existieren.
Wir wollen nun die Dicke der Schicht bestimmen. Dazu bestimmen wir zuerst das
elektrische Potential
0 ∇2 φ = −e(ni − ne )
(1.10)
Wir nehmen nun an, daß die Ionendichte konstant bleibt (auf Grund der Massenträgheit)
und damit den Wert für sehr weit Entfernung annimmt ni = n∞ . Die Verteilungsfunktion
für die Elektronen ist nun
1
f (u) = A exp(−( mu2 + qφ)/kB T )
2
(1.11)
ne = n∞ exp(eφ/kB T )
(1.12)
Integriert man
Diesen Ausdruck kann man nun in der Potentialgleichung verwenden
0 ∇2 φ = en∞ (exp(eφ/kB T ) − 1)
(1.13)
Echte Physiker lösen das nicht direkt, sondern machen eine Taylor-Entwicklung
2 !
eφ
1
eφ
0 ∇2 φ = en∞
+ ·
(1.14)
kB T
2
kB T
Für große φ läßt sich das nicht ohne Weiteres vereinfachen, aber uns interessiert nur der
Bereich, in dem φ ohnehin abfällt
0
n∞ e2
d2 φ
=
dx2
kB T
(1.15)
Definieren wir nun die Größe
r
λD =
0 kB T
ne2
(1.16)
11
1 Was ist Plasma?
Dann ist die Lösung der DGL
φ(x) = φ0 exp(−x/λD )
(1.17)
λD ist die Debye-Länge und eine der fundamentalen Größen, die ein Plasma bestimmen.
Die Debye-Länge bestimmt die Güte dr Abschirmung in einem Plasma. Die Abschirmung
wird besser (λD kleiner) für höhere Dichten, da mehr Elektronen zur Verfügung stehen.
Die Abschirmung wird hingegen schlechter, wenn die Temperatur steigt, was man dadurch erklären kann, daß die Teilchen sich durch ihre höhere kinetische Energie weiter
von der Störung entfernen können.
Aus der Debye-Länge kann man nun eine Bedingung für die Existenz eines Plasmas
herleiten
λD L
(1.18)
wobei L die äußere Größe des Systems ist. Wenn diese Bedingung nicht erfüllt ist, findet
innerhalb des Systems keine effektive Abschirmung elektrischer Felder statt und das
Plasma wird im wesentlich von äußeren Effekten beeinflußt.
1.2.3 Plasmaparameter
Man kann sich leicht vorstellen, daß die Abschirmung in einem Plasma nur dann wirklich gut funktioniert, wenn sich innerhalb der Debye-Länge genügend Teilchen befinden.
Als Hilfsmittel kann man sich dazu eine Debye-Sphäre vorstellen, also eine Kugel mit
dem Radius einer Debye-Länge. Innerhalb dieser Kugel möge sich mehr als ein Teilchen
aufhalten
4
ND = ni πλ3D 1
(1.19)
3
Ist diese Bedingung nicht erfüllt, findet man kaum kollektives Verhalten.
1.2.4 Kriterien für Plasmen
Aus den vorangegangenen Abschnitten können wir folgende Kriterien für ein Plasma
ableiten
• Ein Plasma ist ein Gas aus geladenen und neutralen Teilchen, daß ein kollektives
Verhalten aufweist
• Die Debye-Länge möge kleiner sein als die Systemgröße
• Innerhalb einer Debye-Sphäre mögen sich hinreichend viele Teilchen aufhalten
Auch wenn hier keine explizite Aussage über die notwendige Ionisation gegeben wird,
kann man sich leicht überlegen, daß die Debye-Länge ausschließlich von der Ionendichte
abhängt. Wendet man diese Definition auf unser Beispiel vom Anfang an, so kann man
hier durch Bestimmung von λD sehen, daß die Raumluft kein Plasma ist.
12
1.3 Verschiedene Plasmen
Abbildung 1.1: Bereiche in denen Plasmen existieren
1.3 Verschiedene Plasmen
Die übliche Charakterisierung eines Plasmas findet über die Parameter n und kB Te
statt (Randbemerkung: Bei sauberer Definition müsste natürlich n und ni angegeben
werden, die meisten Anwendungen haben aber sehr hohe Ionisationsgrade). Die Dichte variiert hier um bis zu 28 Größenordnungen und auch die Temperatur um bis zu 7
Größenordnungen. Vergleicht man die Variationsbreite in der Dichte übersteigt bei Weitem die gängigen Vorstellungen über Dichtekontraste. Selbst der Dichtekontrast zwischen
Wasser und Neutronensternen beträgt nur 15 Größenordnungen.
Insbesondere erstaunlich ist, daß alle diese Plasmen durch denselben Satz klassischer
Gleichungen bestimmt wird (Randbemerkung: Es gibt auch Plasmen die einer quantenmechanischen Beschreibung bedürfen, diese befinden sich aber bei noch weit höheren
Dichten).
Einige typische Plasmen sollen hier eingeführt werden.
1.3.1 Gasentladung
Die ersten Plasmen wurden von Tonks und Langmuir in den 1920er Jahren entdeckt. Sie
hatten an gasgefüllten Vakuumröhren geforscht und dabei Gasdichten von 1014 < n <
1018 verwendet bei Temperaturen von kB T = 2 eV. Dabei hat man die Abschirmung um
die Elektrode entdeckt hat. Dabei sieht man die Schicht als dunkle Linie
13
1 Was ist Plasma?
1.3.2 Leuchtstoffröhre
Hat jeder schon gesehen: Glaskolben gefüllt mit Quecksilber oder Argon mit einem Druck
von 1 Pa bis 100 MPa. Sehr hohe Elektronentemperatur (> 100 eV!).
1.3.3 Kernfusion
Die Kernfusion ist seit mehreren Jahrzehnten eines der wichtigsten Forschungsthemen
moderner Plasmaphysik. Genau wie beim Vorbild der Sonne versucht man in sehr heißen
und dichten Plasmen die elektrostatische Abschirmung von Atomkernen zu überwinden
und so Fusion einzuleiten. Die menschengemachte Fusion unterscheidet sich aber grundsätzlich
von der natürlichen: In der Sonne führt die Gravitation und die unglaublich hohe Säulendichte
im Zentrum der Sonne zu einem sehr hohen Druck bei moderaten Temperaturen. In modernen Versuchsreaktoren hingegen kann man zwar leicht sehr hohe Temperaturen, aber
nur sehr schwer hohe Drücke erzeugen.
Die Probleme moderner Fusionsforschung liegen deshalb im wesentlichen in Einschluß
und Heizung des Fusionsplasmas
1.3.4 Weltraumphysik
Erst einmal zur Begriffsklärung: Weltraumphysik beschäftigt sich, im Gegensatz zur
unten beschriebenen Astrophysik, mit der Physik des erdnahen Weltalls. Die Grenze von
Weltraum- und Astrophysik liegt etwa 100 AU, also deutlich hinter der Neptun-Bahn.
Die Weltraumphysik beschäftigt sich damit auch vorzugsweise mit der Physik des
Sonnenwindes, der unsere nähere Umgebung maßgeblich beeinflußt. Der Sonnenwind ist
eine kontinuierlich Emission von Teilchen von der Sonne. Typische Parameter sind hier
n = 5 × 106 m−3 , kB Ti = 10 eV, kB T = 50 eV, B = 5 × 10−9 T. Der Sonnenwind hat
dabei eine Driftgeschwindigkeit von rund 300 km/s.
Der Sonnenwind interagiert dabei mit dem Magnetfeld und der Atmosphäre der Erde,
insbesondere in der Ionosphäre (bis r = 10rE , n = 1012 m−3 , kB T = 0.1 eV). Durch die
Interaktion werden hochenergetische Teilchen im Van Allen-Gürtel gefangen.
1.3.5 Astrophysik
Die Bandbreite astrophysikalischer Plasmen reicht vom Sterneninneren (dichtes, heißes
Fusionsplasma) über Sternatmosphären (dünneres, aber heißeres Plasma) bis hin zu
kalten Molekülwolken. Grundsätzlich liegen fast alle Objekte außerhalb unseres direkten
Umfeldes im Plasmazustand vor.
Sicherlich sind die im optischen oder Radio leuchtenden Objekte diejenigen, die das
Interesse hervorrufen, aber auch der gesamte Raum dazwischen ist mit Plasma gefüllt.
Das interstellare Medium reicht von n = 107 m−3 und kB T = 0.01 eV bis n = 1 m−3
und kB T = 100 eV
14
1.3 Verschiedene Plasmen
1.3.6 Technische Niedertemperaturplasmen
Technische Niedertemperaturplasmen finden Anwendungen vornehmlich in Beschichtungsverfahren (z.B. entspiegelte Brillengläser) und Ätzprozessen (Leiterbahnen ätzen).
Durch die Verwendung einer großen Bandbreite von Plasmakompositionen (vornehmlich
Argon und Methan als Konstituenten) und technischer Varianten (induktive und kapazitive Kopplung, gerichtete elektrische Felder . . . ) können unterschiedlichste technische
Fragestellungen bearbeitet werden.
Typische Größenordnungen für die Parameter des Plasmas sind p = 0.1 − 100 mbar
bei Temperaturen knapp über Raumtemperatur. Die Ionisationsgrade sind dabei relativ klein, die Elektronenenergie kann aber dennoch relativ hohe Werte erreichen (im
Gegensatz zur Neutralgastemperatur).
15
1 Was ist Plasma?
16
2 Einzelteilchen
Die meisten Plasmen bewegen sich mit ihrer Dichte in einem Übergangsbereich: Während
bei sehr dichten Flüssigkeiten (wie z.B. Wasser) nur die Fluidbewegung eine Rolle spielt
und die Einzelteilchenbewegung durch Kollision verhindert wird und bei sehr dünnen
Gasen (z.B. Ionenstrahl) nur die Einzelteilchenbewegung eine Rolle spielt, muß man bei
Plasmen meist beides berücksichtigen.
Um dieses Verhalten näher untersuchen zu können, soll hier im ersten Schritt die
Einzelteilchenbewegung beschrieben werden. Der Einfachheit halber werden elektrische
und magnetische Felder als gegeben angenommen, sie werden also nicht von den Teilchen
beeinflußt.
2.1 Gleichförmiges E- und B-Feld
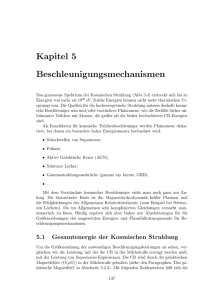
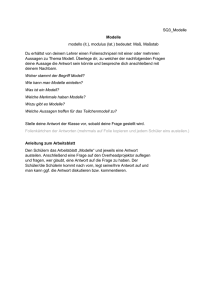
2.1.1 E=0
Man kann sich leicht überzeugen, daß sich hier eine
Zyklotron-Bewegung ergibt. Die Bewegungsgleichung ist
d~v
~
= q~v × B
dt
Das B-Feld möge nun in z-Richtung liegen.
m
(2.1)
mv̇x = qBvy
(2.2)
mv̇y = −qBvx
qB 2
vx
v̈x = −
m
qB 2
v̈y = −
vy
m
(2.3)
(2.4)
(2.5)
Abbildung 2.1: Homogenes
B-Feld mit Offensichtlich ist dies ein harmonischer Oszillator mit der
Frequenz
Gyration
|q|B
Ω=
(2.6)
m
Hier soll die Definition verwendet werden, nach der die
Zyklotronfrequenz immer positiv ist. Aus dieser Frequenz
kann man leicht eine weitere Größe gewinnen: Den LarmorRadius. Den Radius des Kreises, den die Teilchen beschreiben
v⊥
rL =
(2.7)
Ω
17
2 Einzelteilchen
v⊥ beschreibt dabei die Geschwindigkeit senkrecht zum Magnetfeld.
2.1.2 Endliches E
Die Erweiterung des vorherigen Falles ist das Hinzufügen eines elektrischen Feldes.
O.b.d.A. nehmen wir dabei an, daß das E-Feld in der x-z-Ebene liegt. Man kann sich
leicht davon überzeugen, daß man das Koordinatensystem immer so wählen kann, daß
E immer in x-z-Richtung liegt. Dadurch ändern sich die Gleichungen folgendermaßen
q
Ez
m
v̇z =
(2.8)
which is solved by
qEz
tvz0
m
zusätzlich bekommt man folgende Terme in der x- und y-Komponente
vz =
q
Ex ± Ωvy
m
= 0 ∓ Ωvx
(2.9)
v̇x =
(2.10)
v̇y
(2.11)
Durch differenzieren erhält man die Lösung
vx = v⊥ exp(iΩt)
vy
Ex
= ±iv⊥ exp(iΩt) −
B
(2.12)
(2.13)
Man sieht also, daß in y-Richtung eine Drift überlagert wurde. Eine allgemeinere Formulierung für diese Drift erhält man, wenn man die vektorielle Gleichung für die Geschwindigkeit des Führungszentrums löst. Dazu vernachlässigt man die zeitliche Ableitung der
Geschwindigkeit in der Bewegungsgleichung, da diese nur die zyklische Bewegung wiedergibt. [Herr Chen, das ist Bockmist. Du hast ein Ez angenommen, das du damit ebenfalls
unter den Tisch fallen lässt.] Dann bleibt von der Bewegungsgleichung nur noch der
Term
~ + ~v × B
~ =0
E
(2.14)
~
übrig. Von dieser Gleichung bildet man nun das Kreuzprodukt mit B
~ ×B
~ =B
~ × (~v × B)
~ = ~v B 2 − B(~
~ v · B)
~
E
(2.15)
Die senkrechte Komponente dieser Gleichung ist dann
v⊥ =
~ ×B
~
E
2
B
(2.16)
Diese Driftgeschwindigkeit ist unabhängig von Ladung, Masse und Geschwindigkeit der
Teilchen. Man kann sich das anhand des physikalischen Bildes vorstellen. Während einer halben Gyration gewinnt das Teilchen Energie und sein Gyrationsradius vergrößert
18
2.2 Ungleichförmiges B-Feld
sich dadurch. In der zweiten Hälfte verliert es wiederum Energie und der Gyrationsradius wird kleiner. Der Unterschied zwischen diesen beiden Gyrationsradien führt zur
Driftgeschwindigkeit.
Betrachtet man nun Teilchen gleicher Geschwindigkeit aber unterschiedlicher Masse,
so hat das leichtere zwar einen kleineren Gyrationsradius und somit eine kleinere Drift
pro Gyration, dieser Effekt wird aber vollständig dadurch aufgefangen, daß es dafür
umso häufiger gyriert.
2.1.3 Gravitationsfeld
Dieselbe Überlegung, wie wir sie eben für eine Überlagerung von E- und B-Feld vorgenommen haben, kann man auch für Gravitations- und B-Feld anstellen. Dann erhält
man
~
m ~g × B
vg =
(2.17)
2
q B
Dieses Verhalten ist zwar analog zur vorherigen Drift, ein wesentlicher Unterschied ist
aber, daß diese Drift von der Ladung der Teilchen abhängt. Dadurch trennen sich positive
und negative Ladungen und ein Nettostrom entsteht
~
~j = n(M + m) ~g × B
B2
(2.18)
2.2 Ungleichförmiges B-Feld
Die einfachen Fälle, in denen E- und B-Felder konstant sind, können wir nun mit
ähnlichen Techniken die Fälle analysieren, in denen sich elektrische und magnetische
Felder in Raum und Zeit veränderlich sind. Da inhomogene Felder das Problem erheblich verkomplizieren, nehmen wir die Analyse in Potenzen von rL /L vor, wobei L eine
typische Skalenlänge für die Änderung ist.
2.2.1 Grad-B-Drift
Für diesen Fall nehmen wir gerade Magnetfeldlinien an,
die sich allerdings in einer Richtung verdichten. Hier soll
pgflastimage
der Gradient der Magnetfeldstärke (des Betrags von B) in
y-Richtung liegen. Man kann annehmen, daß die LarmorRadien sich während einer Gyration ändern, da die MaAbbildung 2.2: B-Feld
in
z- gnetfeldstärke “oben” und “unten” unterschiedlich ist, was,
Richtung, genau wie schon bei der E × B-Drift, wiederum zu einer
des Stärke Drift-Bewegung führt. Die Stärke der Drift sollte dann auch
in
y- von rL /L abhängen.
Um eine quantitative Aussage machen zu können, mitteln
Richtung
~
~
veränderlich wir die Lorentz-Kraft F = q~v × B über eine Gyrationsperiode. F̄x ist dabei 0, da das Teilchen sich genauso lange auf
ist
19
2 Einzelteilchen
wie ab bewegt. Anders sieht es bei F̄y aus. Hier kommt der
oben erwähnte Effekt zum Tragen, daß sich der Larmorradius ändert. Da hier Effekte
höherer Ordnung auftreten, die die Berechnung erheblich erschweren würden, werden
wir die Rechnung nur mit den ungestörten Bahnen durchführen. Dann erhalten wir
∂B
Fy = −qvx Bz (y) ' −qv⊥ cos(Ωt) B0 ± rL cos(Ωt)
(2.19)
∂y
Als wahre Physiker haben wir natürlich auch nicht das Magnetfeld, sondern nur die
Taylor-Reihe bis zur ersten Ordnung eingesetzt
~ = B
~ 0 + (~r · ∇)B
~ ...
B
Bz = B0 + y(∂B/∂y) + . . .
(2.20)
(2.21)
Das darf man genau dann machen, wenn die Änderungsskala L kleiner als der Gyrationsradius ist. Nun noch schnell die Mittelung ausführen
1
F̄y = ∓qv⊥ rL (∂B/∂y)
2
(2.22)
Das heißt, wir haben eine Nettokraft auf das Teilchen in y-Richtung. Dieses Ergebnis
können wir mit den bisherigen Driften vergleichen und erhalten dementsprechend die
Driftgeschwindigkeit
~ × ∇B
1
B
~v∇B = ± v⊥ rL
(2.23)
2
B2
Alles wie gewohnt, einzig der Faktor 1/2 ist neu.
2.2.2 Krümmungsdrift
Die Feldgeometrie hier wird so gewählt, daß die Feldlinien gekrümmt sind mit konstanten
Krümmungsradius Rc entlang derer das Magnetfeld konstant ist. Durch die Zentrifugalkraft kommt es hier natürlich direkt zu einer Drift, allerdings muß bei einer physikalischen Realisierung beachtet werden, daß, um die Maxwell-Gleichungen zu erfüllen, das
Magnetfeld zusätzlich einen Gradienten besitzt. Dieser führt zu einer zusätzlichen GradB-Drift.
Die Zentrifugalkraft ist
mvk2
F~ =
~er
(2.24)
Rc
woraus man die Drift berechnen kann
~vR =
~c × B
~
mvk2 R
qB 2
Rc2
(2.25)
Nun gilt im Vakuum (stromfrei!) die Bedingung
~ z=
(∇ × B)
20
1 ∂
1
(rBθ ) = 0 ⇒ Bθ ∼
r ∂r
r
(2.26)
2.2 Ungleichförmiges B-Feld
Womit wir eine Aussage über den Gradienten von B bestimmen können
| B |∼
~c
∇|B|
R
1
⇒
=− 2
Rc
|B|
Rc
(2.27)
Das kann man nun direkt in die Formel für die Grad-B-Drift einsetzen
~v∇B =
~c × B
~
1m 2 R
v⊥ 2 2
2 q
Rc B
(2.28)
Somit ergibt sich die Gesamtdrift
~vR + ~v∇B =
~c × B
~
mR
1 2
(vk2 + v⊥
)
2
2
q Rc B
2
(2.29)
Da sich diese beide Driften aufaddieren, haben wir ein Problem. In jedem gebogenen
Magnetfeld werden die Teilchen auf Grund der Drift entweichen. Dies stellt gerade in
der Fusionsforschung ein massives Problem dar: Die gängige Geometrie für Fusionsexperimente ist ein Torus, der eben ein solches gebogenes Magnetfeld aufweist.
2.2.3 Magnetische Spiegel
Im Gegensatz zu den vorherigen Beispielen nehmen wir hier an, daß die Richtung des
Magnetfeldes und der Gradient der Feldstärke in derselben Richtung liegen. Zusätzlich
nehmen wir an, daß das Feld axysymmetrisch ist (Bθ = 0 und ∂B/∂θ = 0). Auf Grund
der Maxwell-Gleichungen muß eine zusätzliche Br -Komponente vorhanden sein.
~ =0 ⇒
∇·B
∂
∂Bz
(rBr ) +
=0
r∂r
∂z
(2.30)
Daraus kann man, wenn man das Magnetfeld bei r = 0 kennt und annimmt, daß der
Gradient in z-Richtung sich nur wenig ändert, das Radialfeld bestimmen
Z r
∂Bz
1 2 ∂Bz
dr ' − r
(2.31)
rBr = −
r
∂z
2
∂z
0
1 ∂Bz
Br = −
(2.32)
2 ∂z
Somit kann man wie gewohnt die Lorentz-Kraft bestimmen
Fr = q(vθ Bz −vz Bθ )
|{z}
|{z}
(2.33)
Fθ = q(−vr Bz +vz Br )
|{z}
|{z}
(2.34)
Fz = q(vr Bθ −vθ Br )
|{z}
|{z}
(2.35)
Term1
Term2
=0
=0
Term3
Term4
21
2 Einzelteilchen
Die Terme 1 und 2 ergeben die Larmor-Bewegung, Term 3 verschwindet bei einer Bewegung auf der Achse (Br ∼ r). Befindet sich das Teilchen nicht auf der Achse führt dieser
Term zu einer Radialdrift, die das Teilchen auf die Magnetfeldlinien zwingt. Damit bleibt
nur noch Term 4 als letzter interessanter übrig.
1
Term4 Fz = qvθ r(∂Bz /∂z)
2
(2.36)
Auch hier werden wir wieder über eine Gyrationsperiode mitteln. Der Einfachheit
halber soll angenommen werden, daß das Führungszentrum sich auf der Achse befindet.
F̄z = −
2
∂Bz
1 mv⊥
2 B ∂z
(2.37)
Nun definieren wir noch eine Größe
µ=
2
1 mv⊥
2 B
(2.38)
Dies ist das magnetische Moment des Teilchens. Damit läßt sich die Kraft des Teilchens
bestimmen
∂B
F̄z = −µ
(2.39)
∂z
was der allgemeinen Beschreibung der Kraft auf ein diamagnetisches Teilchen entspricht.
Vergleicht man dies mit der Kraft auf eine stromdurchflossene Schleife (µ = IA), so
stellt man fest, daß man die makroskopischen Größen Strom und Fläche auch auf unser
mikroskopisches Beispiel übertragen kann: Der Strom entspricht hier der gyrierenden
Ladung (I = eΩ/2π) und die Fläche ist genau der überstrichene Gyrationsradius (A =
2 = πv 2 /Ω2 )
πrL
⊥
2
πv 2 eΩ
mv⊥
µ= ⊥
=
(2.40)
Ω 2π
2B
Die makroskopische Definition entspricht also dem µ, das wir aus der Kraftbetrachtung
gewonnen haben.
Wenn sich unser Teilchen nun in Regionen variierenden Bs bewegt, ändert sich zwar
sein Larmor-Radius, µ bleibt aber invariant. Beweis folgt:
m
dvk
∂B
= −µ
dt
∂s
(2.41)
Mit vk multiplizieren
1
∂B ds
dB
mvk dvk dt = ddt( mvk2 ) = −µ
= −µ
2
∂s dt
dt
(2.42)
Die Ableitung dB/dt ist nun die zeitliche Ableitung im System des Teilchens. Um nun
die Erhaltung von µ zu beweisen, greifen wir auf die Energieerhaltung zurück.
d 1
1
d 1
2
2
2
mv + mv
=
mv + µB
(2.43)
dt 2 k 2 ⊥
dt 2 k
22
2.2 Ungleichförmiges B-Feld
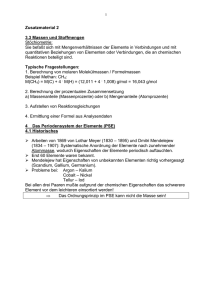
x
x
B0
Abbildung 2.3: Skizze eines magnetischen Spiegels: Die Feldlinien werden zu den Enden
des Spiegels dichter
Nun können wir noch die zeitliche Ableitung der parallelen Energie einsetzen
dB
d
dµ
+ (µB) = 0 ⇒
=0
(2.44)
dt
dt
dt
Mit der Erhaltung des magnetischen Moments kann man nun magnetische Spiegel
(Bild 2.2.3) bauen. Offensichtlich nimmt ja die parallele Geschwindigkeit ab, wenn das
Magnetfeld zunimmt. Hat man nun eine Magnetfeldkonfiguration, in der an beiden Ende
sich die Feldlinien stark verdichten, so nimmt (bei Teilchen mit geringer Energie) die
Parallelkomponente der Geschwindigkeit ab, bis sie 0 wird. Dadurch können Teilchen im
Spiegel gehalten werden.
Ob ein Teilchen gefangen wird, hängt im wesentlichen von seinem Verhältnis v⊥ /vk
ab. Wenn wir nun annehmen, daß wir in der Mitte ein Feld B0 haben und außerdem ein
maximales Bm , können wir bestimmen welche Teilchen den Spiegel verlassen können.
Dafür muß am Wendepunkt nur vk = 0 sein. Für die Invarianz von µ gilt dann
−µ
1
1
02
mv 2 /B0 = mv⊥
/B 0
2 ⊥0
2
Zusätzlich gilt die Energieerhaltung
(2.45)
02
2
2
v⊥
= v⊥0
+ vk0
(2.46)
2
2
v⊥0
v⊥0
B0
=
=
= sin2 θ
02
B0
v⊥
v02
(2.47)
Woraus dann folgt
θ ist dann der sogenannte Pitch-Winkel, letztlich der Winkel zwischen Bewegungsrichtung und Magnetfeld. Wenn der Winkel θ zu klein wird, erreichen wir irgendwann den
Punkt an dem B 0 > Bm , wo das Feld also keine Teilchen mehr reflektieren kann.
23
2 Einzelteilchen
2.3 Ungleichförmiges E-Feld
Die bisher verwendeten Techniken können wir nun genauso auch in Fällen anwenden, in
denen das elektrische Feld Inhomogenitäten aufweist.
~ = E0 (cos ky)~ex
E
(2.48)
Hier nur der einfach Fall einer Welle in y-Richtung, deren Amplitude in x-Richtung
weist. Solch ein Struktur kann in Plasmen durch Wellen entstehen, die die Ladungsträger
auslenken.
Nun zu den üblichen Schritten
~ + ~v × B
~
md~v /dt = q(E
qB
q
v̇x =
vy + Ex (y)
m
m
qB
v̇y = −
vx
m
Ėx
v̈x = −Ω2 vx ± Ω
B
Ex (y)
v̈y = −Ω2 vy − Ω2
B
(2.49)
(2.50)
(2.51)
(2.52)
(2.53)
Das elektrische Feld Ex (y) ist an der Position des Teilchens gegeben. Wir brauchen also
die Bahn des Teilchens um die Bahn des Teilchens zu bestimmen. Wenn das elektrische
Feld schwach ist, können wir auch in erster Näherung eine ungestörte Bahn annehmen
y = y0 ± rL cos Ωt
(2.54)
Woraus dann weiter folgt
v̈y = −Ω2 vy − Ω2
E0
cos k(y0 ± rL cos Ωt)
B
(2.55)
Nach unseren Erfahrungen aus dem vorherigen Abschnitt, nehmen wir nun an, daß die
Lösung sich wieder aus Gyration und Drift zusammensetzt. Dazu mitteln wir wieder die
wirkende Kraft
E0
v̈¯y = 0 = −Ω2 v̄y − Ω2 cos k(y0 ± rL cos Ωt)
(2.56)
B
Den Cosinus sehen wir uns ein wenig genauer an
cos k(y0 ± rL cos Ωt) = cos(ky0 ) cos(krL cos Ωt) ∓ sin(ky0 ) sin(krL cos Ωt)
(2.57)
Nun nehmen wir an, daß krL 1, dies entspricht der Annahme, daß die Wellenlänge
sehr viel größer als der Gyrationsradius ist.
1
2
cos k(y0 ± rL cos Ωt) ' (cos ky0 )(1 − k 2 rL
cos2 Ωt) ∓ (sin ky0 )krL cos Ωt
2
24
(2.58)
2.4 Zeitlich variierendes E-Feld
Nun können wir uns nochmal Gleichung 2.56 ansehen. Dadurch, daß die Kraft 0 ist,
haben wir auf der rechten Seitung eine Gleichung für v̄y haben.
v̄y = −
E0
1
Ex (y0 )
1
2
2
cos ky0 )(1 − k 2 rL
)=−
(1 − k 2 rL
)
(
4
B
4
(2.59)
~ × B-Drift,
~
Das liest sich wie die normale E
die aber durch eine Inhomogenität verändert
wurde. Die physikalische Erklärung ist auch analog, aber man sollte sich überlegen, daß
eine lineare Änderung des E-Feldes keinerlei Effekt hat, erst die zweite Ableitung bringt
den gewünschten Effekt
~
~
1 2 2 E
×B
vE = 1 − rL ∇
(2.60)
2
4
B
In dieser Formel erkennt man sehr schön, daß die Driftgeschwindigkeit vom LarmorRadius abhängt. Das kann dazu führen, daß Ionen mit ihrem großen Larmor-Radius
sich von den Elektronen trennen. Sollte das dabei entstehende elektrische Feld das schon
vorhandene verstärken, kann sich eine sogenannte Drift-Instabilität entwickeln.
2.4 Zeitlich variierendes E-Feld
Nun wollen wir annehmen, daß die Felder zwar räumlich homogen, das elektrische Feld
aber zeitlich variabel ist
~ = E0 exp(iωt)~ex
E
(2.61)
Analog zum vorherigen Abschnitt folgt daraus nun
iω Ex
v̈x = −Ω2 vx ∓
Ω B
(2.62)
Nun schnell noch zwei neue Größen
iω Ẽx
Ω B
Ẽx
= −
B
ṽp = ±
(2.63)
ṽE
(2.64)
Die Größen mit Tilde mögen andeuten, daß es sich um eine oszillierende Größe handelt.
Mit den verwendeten Abkürzungen schreiben sich die Bewegungsgleichungen
v̈x = −Ω2 (vx − ṽp )
2
v̈y = −Ω (vy − ṽE )
(2.65)
(2.66)
Jetzt zauber wir schnell einen Ansatz aus dem Hut
vx = v⊥ exp(iΩt) + ṽp
(2.67)
vy = ±iv⊥ exp(iΩt) + ṽE
(2.68)
25
2 Einzelteilchen
Doppeltes Differenzieren liefert dann
v̈x = −Ω2 (vx − ṽp ) − ω 2 ṽp
2
v̈y = −Ω (vy − ṽE ) + ṽE
(2.69)
(2.70)
Das ist jetzt zwar was völlig anderes als vorher, macht aber nichts: Wir nehmen einfach
an, daß unsere Lösung für schwach variierende E-Felder gilt (ω Ω) und schon können
wir das Ganze als Lösung verwenden.
Nun kann man erkennen, daß wir hier zwei Komponenten der Drift haben: Einerseits
die übliche E × B-Drift die senkrecht zum E-Feld ist (hier allerdings mitoszilliert) und
eine Polarisationsdrift entlang des E-Feldes (in x-Richtung). Etwas verallgemeinert läßt
diese sich schreiben als
~
1 dE
~vp = ±
(2.71)
ΩB dt
Und wieder mal haben unterschiedliche Driften für unterschiedliche Ladungen, also mal
wieder einen Strom
~
~jp = ne(vip − vep ) = ρ dE
(2.72)
2
B dt
Physikalisch kann man sich die Polarisationsdrift erklären, wenn man annimmt, daß
beim Einschalten des E-Feldes die Teilchen abgelenkt werden und beim Umkehren wieder
abgebremst werden. Netto ergibt sich daraus eine Drift-Bewegung durch die Trägheit.
Wenn ω gegen 0 geht, verschwindet der Effekt.
2.5 Zeitlich variierendes B-Feld
Letzte Runde bei den Driften: Das B-Feld möge sich zeitlich verändern. Leider könen
B-Felder die Energie eines Teilchens nicht verändern, allerdings sind mit veränderlichen
B-Feldern immer auch E-Felder verbunden
˙
~ = −~B
∇×E
(2.73)
Dummerweise sind die Felder jetzt nicht mehr homogen.
Sei v⊥ = d~l/dt die transversale Geschwindigkeit entlang der Teilchentrajektorie und
ignorieren wir vk so kann man schreiben
~
d
2
~ · ~v⊥ = q E
~ · dl
= qE
1/2mv⊥
(2.74)
dt
dt
Nun integrieren wir das wieder über eine Gyrationsperiode, um die Änderung zu bestimmen. Dabei nehmen wir wieder an, daß sich die Felder sich langsam verändern und wir
die Zeitintegration durch ein Linienintegral über die ungestörte Bahn ersetzen können
I
2
~ · d~l
δ(1/2mv⊥ ) =
qE
(2.75)
Z
~ · dS
~
= q (∇ × E)
(2.76)
SZ
˙ · dS
~
= −q ~B
(2.77)
S
26
2.6 Adiabatische Invarianten
~ ist die geschlossene Oberfläche des Larmor-Radius. Die Orientierung ist durch die
S
~ · dS
~ < 0 für Ionen). Dann erhalten wir
Rechte-Hand-Regel gegeben (B
2
2
δ(1/2mv⊥
) = ±q ḂπrL
=
2
1 mv⊥
2π Ḃ
·
2 B
Ω
(2.78)
Aus unseren vorherigen Berechnungen wissen wir, daß die linke Seite der Gleichung
δ(µB) entspricht, die rechte ist aber gerade µδB. Daraus folgt δµ = 0. In schwach
veränderlichen Feldern wird das magnetische Moment erhalten.
2.6 Adiabatische Invarianten
Der
Noether-Theorem besagt, daß bei periodischen Bewegungen das Wirkungsintegral
H
pdq eine Erhaltungsgröße ist. Diese Definition erweitern wir hier auf langsame Veränderungen
des Systems, die die Periodizität stört. Dann spricht man von einer adiabatischen Invarianten.
Langsam bezieht sich immer auf die Periode des Systems. Damit ist das Integral
H
pdq noch definiert, aber eigentlich kein geschlossenes mehr.
Adiabatische Invarianten erlauben eine Vereinfachung komplexer Fragestellungen in
der Plasmaphysik.
2.6.1 Das magnetische Moment µ
Das magnetische Moment haben wir schon vorher kennengelernt und bewiesen, daß
es in räumlich und zeitlich veränderlichen B-Feldern erhalten bleibt. Nun wollen wir
die Definition des Noether-Theorems ausnutzen. Die periodische Bewegung ist dann
natürlich die Larmor-Bewegung. Wir wählen außerdem für p den Drehimpuls mv⊥ r und
dq = dθ:
I
I
2
mv⊥
m
pdq = mv⊥ rL dθ = 2πrL mv⊥ = 2π
= 4π µ
(2.79)
Ω
q
Damit wäre bewiesen, daß µ eine Erhaltunsgröße ist, sofern q und m konstant sind. Die
einzige Annahme hier ist nur die langsame Änderung der Felder.
2.6.2 Die longitudinale Invariante J
Wenn man in magnetische Spiegeln eingefangene Teilchen beobachtet, dann sieht man
daß sie regelmäßig zwischen den Seiten des Spiegels hin- un herschwingen. Wieder eine
periodische Bewegung, also muß hier irgendwo auch eine Erhaltungsgröße liegen. Berechnet wird diese über
I
mvk ds
(2.80)
Da Teilchen über Feldlinien driften können, ist auch dies nur eine adiabatische Invariante.
Deren Wert ist
Z
b
J=
vk ds
(2.81)
a
27
2 Einzelteilchen
Eine Anwendung dieser Invariante findet sich zum Beispiel im magnetischen Feld der
Erde. Hier können Teilchen gefangen werden, die langsam um die Erde driften. [Bild 2-16
aus dem Chen]. In einem idealen Feld würde das Teilchen immer an dieselbe Feldlinie
gebunden sein.
Nun kann man über die Erhaltung der kinetischen Energie in den Wendepunkten die
magnetische Feldstärke bestimmen, aber nicht bestimmen, auf welcher Feldlinie es sich
befindent. Da wir aber auch noch J haben, wissen wir, daß die Länge der Feldlinie gleich
bleibt. Gleiche Länge bei gleicher Feldstärke kann nur heißen: Gleiche Feldlinie!
2.6.3 Der magnetische Fluß Φ
Aus der Teilchenbewegung im Magnetfeld der Erde kann man noch eine weitere Invariante ableiten: Den magnetischen Fluß. Man kann sehen, daß auch bei variierendem B die
Teilchen auf einer Oberfläche bleiben, die dieselbe Anzahl Feldlinien einschließt. Leider
ist diese Invariante nicht sonderlich nützlich, da die Zeitskala auf der sich das B-Feld
ändert, meist kleiner ist als die Gyrationsperioden.
28
3 Fluidbeschreibung
Ein Plasma ist deutlich komplexer als die Summe seiner Teile: Während man die Bewegung eines einzelnen Teilchens leicht abschätzen kann, ist es im Plasma nicht allein
durch die hohe Zahl der Teilchen erheblich schwieriger, sondern auch die Tatsache, daß
die Felder selbstkonsistent bestimmt werden müssen, macht das Leben schwierig. Aber
Hoffnung ist nahe: In sehr vielen Fällen lassen sich Plasmen durch ein sehr einfaches
Bild beschreiben, die Fluiddynamik. Dabei wird nicht das einzelne Teilchen, sondern ein
Ensemble benutzt. Im Gegensatz zur reinen Fluiddynamik spielen hier natürlich noch
Ladungen, Ströme und Felder eine Rolle.
Neben der Fluiddynamik wird später noch die kinetische Theorie eine Rolle spielen,
bei der der Teilchencharakter eine größere Rolle spielt
3.1 Elektromagnetische Beschreibung von Plasmen
Bevor wir irgend etwas elektromagnetisches tun, sollten wir uns die Maxwell-Gleichungen
noch einmal in Erinnerung rufen. Im Vakuum
1∂ ~
B
c ∂t
~ = 4π ~j + 1 ∂ E
~
∇×B
c
c ∂t
~ = 0
∇·B
~ = 4πρ
∇·E
~ = −
∇×E
(3.1a)
(3.1b)
(3.1c)
(3.1d)
Und in Materie
~ = −1 ∂ B
~
∇×E
c ∂t
~ = 4π ~j + 1 ∂ D
~
∇×H
c
c ∂t
~ = 0
∇·B
~ = 4πρ
∇·D
~ = ·E
~
D
~ = µH
~
B
(3.2a)
(3.2b)
(3.2c)
(3.2d)
(3.2e)
(3.2f)
Hier beschreiben ρ und ~j die freien Ladungen und Ströme, aus Polarisation und Magnetisierung ergeben sich noch “gebundene” Ladungen und Ströme, die aber in der Definition
von µ und versteckt wurden.
29
3 Fluidbeschreibung
Für den Vakuumfall müsste man eigentlich auch D und H verwenden, aber da die
interessanten Dinge, wie die Lorentz-Kraft, E und B verwenden, benutzen wir halt diese
Größen.
3.1.1 Klassische Beschreibung von Dielektrika
Die Polarisation P~ ist eigentlich die Summe über alle Einzeldipolmomente p~i im Einheitsvolumen. Daraus lässt sich nun die Menge gebundener Ladung ρb bestimmen
ρb = −∇ · P~
(3.3)
In den Vakuumgleichungen müssten wir dementsprechend auch diese gebundene Ladung
berücksichtigen
~ = 4π(ρf + ρb )
∇·E
(3.4)
Oder alternativ
~ = 4πσf
∇·D
(3.5)
~ und zwar auf folgende Art
Dann steckt die gebundene Ladung in der Definition von D
und Weise
~ =E
~ + 4π P~ = E
~
D
(3.6)
Für eine lineare Abhängigkeit der Polarisation vom elektrischen Feld
~
P~ = χe E
(3.7)
= 1 + 4πχe
(3.8)
ist dann die dielektrische Konstante
Diese Beziehung sollte in einem Plasma ebenso gültig sein, also sollten wir uns um eine
Betrachtung von in Plasmen widmen.
3.1.2 Die dielektrische Konstante eins Plasmas
Aus dem vorherigen Kapitel über die Einzelteilchenbewegung wissen wir, daß fluktuierende E-Felder einen Polarisationsstrom ~jp hervorrufen, der über die Kontinuitätsgleichung
mit einer Polarisationsladung verbunden ist
∂
ρp + ∇ · ~jp = 0
∂t
(3.9)
Das ist äquivalent zur klassischen Beschreibung der Polarisationsladung, allerdings ist
hier eine zeitliche Variabilität des E-Feldes notwendig. Aus den Maxwell-Gleichungen
können wir nun die dielektrische Konstante bestimmen
~ =
∇×B
30
4π ~
1∂ ~
(jf + ~jp ) +
E
c
c ∂t
(3.10)
3.2 Fluidgleichungen
Die Polarisation möge nun im E-Feld verschwinden
~ = 4π (~jf + ~jp ) + 1 ∂ E
~
∇×B
c
c ∂t
(3.11)
Woraus man sofort ablesen kann
=1+
4πjp
~˙
E
(3.12)
Den Polarisationsstrom haben wir vorher schon bestimmt
=1+
4πρ
B2
(3.13)
Damit haben wir die dielektrische Konstante schon bestimmt, allerdings gilt dies im
strikten Fall nur für transversale Bewegung im Niederfrequenzfall (ω Ω), da unsere
Betrachtung für den Polarisationsstrom nur dann gültig sind.
3.2 Fluidgleichungen
Wir wissen jetzt zwar wie elektrische und magnetische Felder für eine bestimmte Konfiguration des Plasmas aussehen, aber eine vollständige Beschreibung enthält natürlich
auch die Reaktion des Plasmas auf eben diese Felder. Hier sollen erst einmal die Fluidgleichungen bestimmt werden. Dabei werden wir ein Multifluid-Ansatz verwenden: Jede
Spezies von geladenen Teilchen hat eine Bewegungsgleichung.
3.2.1 Die konvektive Ableitung
Betrachten wir ein einzelnes Teilchen, so ist seine Bewegungsgleichung
m
d~v
~ + ~v × B)
~
= q(E
dt
c
(3.14)
Nehmen wir jetzt einen ganzen Satz von Teilchen, die weder stoßen noch eine thermische Bewegung durchführen, die somit eine gemeinsame Bewegung durchführen. Die
Bewegungsgleichung für die Durchschnittsgeschwindigkeit ~uliest sich dann
mn
d~u
~ + ~u × B)
~
= qn(E
dt
c
(3.15)
Diese Gleichung ist aus einem einfachen Grund unpraktisch: Wir müssen die Zeitableitung am Ort des Teilchens ausführen. Wir wollen aber eigentlich ein System mit
ortsfesten Koordinaten. Also transformieren wir unsere Ableitung in die ortsfesten Koordinaten
~
~
d ~
∂ ~
∂ G(x,
t) dx
∂ ~
∂ G(x,
t)
G(x, t) = G(x,
t) +
= G(x,
t) + ux
dt
∂t
∂x
dt
∂t
∂x
(3.16)
31
3 Fluidbeschreibung
oder in der mehrdimensionalen Version
~
dG
∂G
~
=
+ (~u · ∇)G
dt
∂t
(3.17)
~
Dies ist die sogenannte konvektive Ableitung, manchmal auch mit DG/Dt
bezeichnet.
Für unseren Fall sieht dann die Bewegung der Fluidteilchen folgendermaßen aus
∂~u
~ + ~u × B)
~
mn
+ (~u · ∇)~u = qn(E
(3.18)
partialt
c
3.2.2 Der Stresstensor
Mit dem vorherigen Abschnitt sieht es eigentlich so aus, als wären damit alle Fragen
geklärt. Allerdings haben wir von vorneherein die thermische Bewegung der Teilchen
ausgeschlossen. Das rächt sich nun. Die thermische Bewegung führt nämlich zu einem
Druck.
Nehmen wir ein Fluidelement ∆x∆y∆z an, dessen Mittelpunkt bei (x0 , 1/2∆y, 1/2∆z)
liegt. Um uns das Leben nicht unnötig schwer zu machen, betrachten wir nun nur Bewegungen in x-Richtung. Dazu nehmen wir nun die Seitenflächen A (links) und B (rechts)
und bestimmen, wieviel Teilchen durch diese Seitenfläche transportiert werden. Für Teilchen, die Seitenfläche A mit Geschwindigkeit vx passieren, ist das
∆nv vx ∆y∆z
∆nv sei die Teilchenzahldichte bei einer bestimmten Geschwindigkeit vx
Z Z
∆nv = ∆vx
f (vx , vy , vz )dvy dvz
(3.19)
(3.20)
Nun hat jedes Teilchen den Impuls mvx . Dichte und Temperatur mögen in jeder Zelle
den Wert des Zellmittelpunktes haben. Nun ist der Impulstransport in das Fluidelement
durch A PA+
X
1
PA+ =
∆nv mvx2 ∆y∆z = ∆y∆z[mv¯x2 n]x0 −∆x
(3.21)
2
Die Mittelung über vx2 kommt hier aus der Summe über ∆nv . Analog ermitteln wir den
Fluß durch B
1
PB+ = ∆y∆z[mv¯x2 n]x0
(3.22)
2
und schlußendlich
1
1
PA+ − PB+ = ∆y∆z[mv¯x2 n]x0 −∆x − ∆y∆z[mv¯x2 n]x0
2
2
1
∂
= ∆y∆z m(−∆x) (nv¯x2 )
2
∂x
(3.23)
(3.24)
Betrachtet man zusätzlich die Teilchen, die sich nach links bewegen, verdoppelt sich die
Summe noch.
∂
∂
(nmux )∆x∆y∆z = −m (nv¯x2 )∆x∆y∆z
(3.25)
∂t
∂x
32
3.2 Fluidgleichungen
Wir nehmen im nächsten Schritt an, daß sich die Geschwindigkeit in zwei Komponenten schreiben läßt
vx = ux + vx0
(3.26)
Dabei sei v0x die zufällige thermische Komponente, für die gilt
1 ¯02 1
mv = KT
2 x
2
Somit läßt sich der Impulstransport umschreiben
KT
∂
∂
2
n(ux +
(nmux ) = −m
∂t
∂x
m
Nach ein wenig spielen erhält man
∂ux
∂n
∂nux
∂ux
∂
mn
+ mux
= −mux
− mnux
−
(nKT )
∂t
∂t
∂x
∂x
∂x
Machen wir uns nun schnell die Massenerhaltung zu Nutze
∂
∂
n+
(nux ) = 0
∂t
∂x
So sieht man, daß der Druck gegeben ist durch
p = nKT
(3.27)
(3.28)
(3.29)
(3.30)
(3.31)
Und die Gleichung
∂
∂
∂
ux + ux +
ux = − p
(3.32)
∂t
∂x
∂x
Was wir jetzt haben, ist an sich eine tolle Gleichung, in der aber auch einige sehr vereinfachende Annahmen stecken. Wir haben hier nur eine Betrachtung in x-Richtung durchgeführt und diese, ohne weiter nachzudenken, auf die anderen Dimensionen übertragen.
In der Realität ist es aber so, daß auch die x-Flächen y-Impuls transportiert werden
kann. Der dazugehörige Effekt heißt Scherstress, der nicht durch skalaren, sondern nur
durch tensoriellen Druck beschrieben werden kann.
mn
Pij = mnvi¯vj
(3.33)
Die einfachsten Fälle des Stresstensors sind der für isotrope Maxwell-Verteilungen
p 0 0
P = 0 p 0
(3.34)
0 0 p
Hier ist offensichtlich, daß ∇ · P = ∇p. Etwas interessanter wird es, wenn man eine
Vorzugsrichtung hat (z.B. durch das Hintergrundmagnetfeld eines Plasmas) und damit
unterschiedliche Temperaturen Tk und T⊥ .
p⊥ 0 0
P = 0 p⊥ 0
(3.35)
0
0 pk
Die Nebendiagonal-Elemente sind meist dann nicht 0, wenn Stöße oder kinetische
Effekte eine Rolle spielen.
33
3 Fluidbeschreibung
3.2.3 Kontinuitätsgleichung
Aus Gründen der Massenerhaltung müssen wir fordern, daß die Änderung der Teilchenzahl in einem Volumen nur durch einen Teilchenstrom durch die Oberfläche erklärt
werden kann
Z
I
Z
∂
∂
~=−
N=
ndV = − n~u · dS
∇ · (n~u)dV
(3.36)
∂t
V ∂t
V
Das muß für jedes Volumenelement gelten, also müssen die Integranden identisch sein
∂
n + ∇ · (n~u) = 0
∂t
(3.37)
Natürlich gibt es eine Kontinuitätsgleichung für jede Spezies.
3.2.4 Zustandsgleichung
Aus dieser Form der Herleitung der Fluid-Gleichungen wird nicht so direkt offensichtlich,
daß die Fluidgleichungen einen unendliche Kette von Gleichungen sind, die irgendwann
abgebrochen wird. Daher müssen wir uns nun kurz überlegen, wo wir abbrechen. Wir
haben die Gleichungen für Massen- und Impulstransport angegeben, also das 0. und
1. Moment angegeben. Die höheren Momente werden durch eine Gleichung für den
Druck wiedergegeben.
p = Cργ
(3.38)
∇p = KT ∇n
(3.39)
im adiabatischen und
Das funktioniert natürlich nur, wenn man das 2. Moment wirklich ignorieren kann. Das
geht genau dann, wenn der Wärmetransport vernachlässigbar ist.
3.2.5 Vollständiger Gleichungssatz
An sich haben wir jetzt alles, was wir benötigen, man könnte also die Gleichungen
aufschreiben. Dabei gehen wir jetzt von zwei Spezies (jeweils eine Elektronen- und Ionenspezie) aus. Zuerst benötigen wir Ladungs- und Stromdichte
ρ = n i qi + n e qe
~j = ni qi~vi + ne qe~ve
34
(3.40)
(3.41)
3.3 Fluiddrift senkrecht zum Magnetfeld
Dabei sei ~v die Fluidgeschwindigkeit und nicht eine Einzelteilchengeschwindigkeit.
~ = 4π(ni qi + ne qe )
∇·E
~˙
~ = −1B
∇×E
c
~ = 0
∇·B
~ = 4π (ni qi~vi + ne qe~ve ) + 1 E
~˙
∇×B
c
c
∂~vj
~ + ~vj × B)
~ − ∇p
m j nj
= qj nj (E
+ (~vj · ∇)~vj
∂t
c
∂nj
+ ∇ · (nj ~vj ) = 0
∂t
pj = C(mj nj )γ
(3.42)
(3.43)
(3.44)
(3.45)
(3.46)
(3.47)
(3.48)
Nun stehen wir mit 16 Skalaren und 18 skalaren Gleichungen da, wobei zwei der MaxwellGleichungen total unnütz sind. Der Rest ergibt ein geschlossenes und selbstkonsistentes
Gleichungssystem.
3.3 Fluiddrift senkrecht zum Magnetfeld
Ausgehend von unserer Betrachtung der Einzelteilchendriften konnte man eigentlich davon ausgehen, daß wir alles über Driften wissen. Bei genauer Betrachtung sehen wir
aber in den Fluidgleichungen einen neuen Term ∇p der eine Kraft auf Fluidelemente
mit sich bringt, die in der Einzelteilchenbetrachtung nicht existiert. Neue Kraft - neue
Drift! Schauen wir nochmal genauer auf die Fluidgleichung
∂~v
~ −∇p
~ + ~v × B)
mn
∇)~v
= qn(E
∂t + |(~v ·{z
}
c
|{z}
|
{z
}
Term 1
Term 2
(3.49)
Term 3
Betrachten wir nun das Verhältnis der Terme 1 und 3
Term1
mniωv⊥
ω
≈|
|≈
Term 3
qnv⊥ B
Ω
(3.50)
Damit haben wir für kleine zeitliche Veränderungen gezeigt, daß wir Term 1 vernachlässigen
können. Im selben Atemzug vernachlässigen wir auch gleich Term 2, es wird sich zeigen,
daß dies die richtige Entscheidung gewesen sein wird. . .
~ und B
~ seien homogen, n und
Wir nehmen nun folgende physikalische Situation an: E
p mögen aber einen Gradienten haben. Diese Situation kann man beispielsweise in einer
eingeschlossen Plasmasäule vorfinden. Um jetzt irgend eine Aussage treffen zu können,
~
multiplizieren wir unsere Rumpfgleichung mit ×B
~ ×B
~ + (~v⊥ × B)
~ × B)
~ − ∇p × B
~
0 = qn(E
~ ×B
~ + B(~
~ v⊥ · B)
~ − ~v⊥ B 2 ) − ∇p × B
~
= qn(E
(3.51)
35
3 Fluidbeschreibung
Hieraus kann man gleich die senkrechte Geschwindigkeit ablesen
~v⊥ =
~ ×B
~
~
E
∇p × B
−
= ~vE + ~vD
2
2
B
qnB
(3.52)
Der erste Term ist die bekannte E × B-Drift
~vE =
~ ×B
~
E
2
B
(3.53)
der zweite Term ist hingegen neu: Die diamagnetische Drift
~vD = −
~
∇p × B
qnB 2
(3.54)
Die diamagnetische Drift ist senkrecht zum Gradienten, weshalb man Term 2 zu Anfang
auch vernachlässigen konnte
[Bild 3-4 aus dem Chen]
Woher kommt nun diese Drift, die sich aus dem Einzelteilchenbild nicht erklären lässt?
Wenn man sich die Orbits der Ionen vorstellt, deren Dichte in eine Richtung zunimmt,
dann erkennt man, daß in jedem Fluidelement mehr Teilchen nach unten als nach oben
driften
[Bild 3-5 aus dem Chen]
Auch wenn aus Sicht der Teilchen die diamagnetische Drift rein fiktiv ist, kann man
sie sich und den mit ihr assoziierten Strom dennoch erklären, wenn man bedenkt, daß
ein tatsächliches Plasma in einem endlichen Raum eingeschlossen ist und Teilchen am
Rand keine vollständigen Larmor-Bewegungen durchführen können.
Nun haben wir zwar eine zusätzliche Drift im Fluid-Bild gefunden, was ist aber mit den
vielen anderen schönen Driften senkrecht zum B-Feld (Grad-B und Krümmungsdrift)?
Leider führen diese Driften nicht zu einer Fluiddrift, denn das Magnetfeld kann nicht
die Energie ändern und somit auch nicht die zu Grunde liegende Maxwell-Verteilung der
Teilchen. Hier mögen die Teilchen also zwar eine Drift ihres Führungszentrums erfahren,
dies führt aber nicht zu einer assoziierten Fluiddrift.
Richtig lustig wird es aber eigentlich erst bei inhomogenen E-Feldern: Dann spielen
auch die Effekte des endlichen Larmor-Radius eine Rolle.
3.4 Fluiddriften parallel zum Magnetfeld
Wenn wir dieselbe Betrachtung wie eben durchführen, hier uns aber nur auf vz beschränken, dann nutzen wir dabei die folgende Gleichung
∂vz
∂p
mn
+ (~v · ∇)vz = qnEz −
(3.55)
∂t
∂z
In den meisten Fällen kann man die konvektive Ableitung getrost vergessen, wir nehmen
hier einfach an, daß vz homogen sein möge, dann müssen wir über diesen Punkt gar
36
3.4 Fluiddriften parallel zum Magnetfeld
nicht erst diskutieren. Dann folgt
∂vz
q
γKT ∂n
= Ez −
∂t
m
mn ∂z
(3.56)
Erwartungsgemäß führen Druck und elektrisches Feld zu einer Beschleunigung entlang
des magnetischen Feldes. Wenn wir an dieser Stelle masselose Elektronen annehmen,
können wir noch ein paar interessante Ergebnisse erzielen:
qEz = e
∂φ
γKTe ∂n
=
∂z
mn ∂z
(3.57)
Da die Mobilität der Elektronen sehr hoch ist, ist auch ihre Wärmeleitfähigkeit nahezu
unbegrenzt, wir dürfen also isotherme Elektronen annehmen
eφ = KTe log n
(3.58)
Hieraus kann man sofort folgendes ablesen
n = n0 exp(
eφ
)
KTe
(3.59)
Das bedeutet nichts anderes als daß wir eine Boltzmann-Verteilung haben und die Elektronen nicht unbegrenzt hohe Energien erreichen können, da sie immer ein elektrostatisches Potential zurücklassen.
37
3 Fluidbeschreibung
38
4 Wellen in Plasmen
Jede periodische Bewegung in Plasmen kann natürlich mit Hilfe der Fourier-Transformation
in einzelne Wellen der Form exp(i(~k~r − ωt)) zerlegen. Die Wellen gehorchen einer Dispersionrelation, die das Verhältnis von ω und k wiedergibt. Daraus lassen sich Phasengeschwindigkeit vph = ω/k und Gruppengeschwindigkeit vg = dω/dk bestimmen. Die
Gruppengeschwindigkeit kann c nicht überschreiten.
4.1 Plasmaoszillationen
Wenn man in einem Plasma im Gleichgewicht ein Elektron auslenkt, so wird es durch das
elektrische Feld wieder an seine ursprüngliche Position zurück gezogen. Dabei überschießt
es, so daß es zu einer Oszillation um seine ursprüngliche Position kommt. Die Oszillationsfrequenz ist dabei charakteristisch für das jeweilige Plasma (wohl einer der Gründe
weswegen sie Plasmafrequenz heißt). Die Frequenz ist zu hoch für die Ionen, so daß diese
auf die Störung gar nicht erst reagieren.
Mit einem Haufen von Vereinfachungen wollen wir nun die Plasmafrequenz bestimmem:
• kein Magnetfeld
• kaltes Plasma
• statischer und homogener Ionenhintergrund
• unendliche Ausdehnung des Plasmas
• Elektronen bewegen sich nur in x-Richtung
Damit lesen sich die Gleichungen folgendermaßen
∂~ve
~
mne
+ (~ve · ∇)~ve
= −ene E
∂t
∂ne
+ ∇ · (ne~ve ) = 0
∂t
(4.1)
(4.2)
Um das Ganze abzuschließen, brauchen wir noch eine Maxwell-Gleichung, vorzugsweise
ohne B
~
~ = ∂ E = 4π(ni − ne )
∇·E
(4.3)
∂x
39
4 Wellen in Plasmen
Natürlich könnte man sich nun um eine ordentliche Lösung des Problems bemühen, aber
wahre Physiker, wenn sie nicht gerade Taylor-Entwicklungen machen, linearisieren das
Problem
ne = n0 + n1
(4.4)
~ve = ~v0 + ~v1
~ = E
~0 + E
~1
E
(4.5)
(4.6)
wobei Größen mit 0 statischer (und hier auch homogener) Hintergrund sind und die
Größen mit 1 deren Störung. Da die Störung natürlich klein ist, ist das Quadrat mit der
selben Selbstverständlichkeit zu klein. Daraus folgt nun ein neuer Satz von Gleichungen
m
∂~v1
∂t
~1
= −eE
∂n1
+ n0 ∇ · ~v1 = 0
∂t
~ 1 = −4πen1
∇·E
(4.7)
(4.8)
(4.9)
Wir wissen eigentlich schon, was am Ende rauskommt, also können wir es auch gleich
einsetzen: Alle gestörten Größen variieren mit exp(i(~k · ~r − ωt)). Mit dieser Annahme
werden aus den DGL gewöhnliche Gleichungen
−imnv1 = −eE1
(4.10)
−iωn1 = −n0 ikv1
(4.11)
ikE1 = −4πen1
(4.12)
Diesen Satz an Gleichungen kann man nun nach v1 auflösen
−imωv1 = −i
4πn0 e2
v1
ω
und hat damit eine eindeutige Frequenz gefunden
r
4πn0 e2
ωp =
m
(4.13)
(4.14)
Dies ist die sogenannte Plasmafrequenz. Üblicherweise unterscheidet man hier ωpe und
ωpi also die Plasmafrequenz für Elektronen und Ionen. Die Plasmafrequenz hängt einzig
und allein von der Dichte des Plasmas ab (bei gegebener Teilchenspezies). Weiterhin
interessant ist, daß die Dispersionsrelation für die Plasmafrequenz nicht von k abhängt,
somit ist also die Gruppengeschwindigkeit 0 und die Oszillation bewegt sich nicht. Diese
Näherung gilt aber nur in unendlich ausgedehnten Systemen.
4.2 Elektronen Plasmawellen
Die vorher besprochenen Oszillationen kann man dazu bringen, sich zu bewegen und
zwar indem man eine thermische Geschwindigkeit berücksichtigt. Am einfachsten kann
40
4.3 Schallwellen
man dies realisieren durch einen Druckgradienten −∇pe . Für den eindimensionalen Fall
gilt dann
∂n1
∇pe = 3KTe ∇ne = 3KTe ∇(n0 + n1 ) = 3KTe
~ex
(4.15)
∂x
womit die linearisierte Bewegungsgleichung folgende Form hat
mn0
∂v1
∂ne
= −en0 E1 − 3KTe
∂t
∂x
(4.16)
auch hier wurden wieder alle Termen weggelassen, die mehr als eine gestörte Größe
enthalten (z.B. (~v1 · ∇)~v1 ). Wenn man jetzt noch die Maxwell-Gleichungen und die
Kontinuitätsgleichung wie vorher ansetzt, erhält man folgendes Gleichungssystem
−4πe
n0 ik
imωn0 v1 =
en0
+ 3KTe ik
v1
(4.17)
ik
iω
4πn0 e2 3KTe 2
2
(4.18)
ω v1 =
+
k v1
m
m
Auflösen ergibt dann die Dispersionsrelation
3
2
ω 2 = ωp2 + k 2 vth
2
(4.19)
Jetzt haben wir eine echte Plasmawelle, deren Gruppengeschwindigkeit von 0 verschieden
ist. Diese Welle heißt Langmuir-Welle.
[Hier Bild 4-5 aus dem Chen]
Langmuir-Wellen lassen sich relativ einfach in Plasmen anregen, allerdings sollte man
einen wichtigen Punkt beachten: Offensichtlich gibt es keine Langmuir-Wellen mit Frequenzen kleiner als ωp . Das heißt insbesondere, daß Anregungen von außen auf das
Plasma unterhalb dieser Frequenz sich nicht ausbreiten werden. Der Kollege Chen führt
an dieser Stelle eine lange Liste von experimentellen Möglichkeiten an, Wellen mit GHzResonatoren anzuregen und mit verschiedensten Techniken zu detektieren, davon nehmen wir an dieser Stelle aber Abstand.
Was wir aber noch festhalten können, ist, daß es sich bei der Langmuir-Welle um eine
longitudinale Welle handelt. Dies kann man schon daran erkennen, daß unsere Herleitung
komplett eindimensional war und alle Größen in x-Richtung ausgelenkt wurden.
4.3 Schallwellen
Eigentlich sind Schallwellen ein Phänomen, das man in normalen Gasen (Luft) findet.
Da die Rechnungen für die Ionen-Wellen im nächsten Abschnitt nahezu identisch sind,
wollen wir kurz noch wiederholen, wie man die Lösung für die Schallwellen mit der
Navier-Stokes-Gleichung findet
∂~v
γp
ρ
+ (~v · ∇)~v = −∇p = − ∇ρ
(4.20)
∂t
ρ
41
4 Wellen in Plasmen
Dazu noch die Kontinuitätsgleichung
∂ρ
+ ∇ · (ρ~v ) = 0
∂t
(4.21)
Schnell noch die Gleichungen linearisiert
−iωρ0~v1 = −
γp0 ~
ikρ1
ρ0
−iωρ1 + ρ0 i~k · ~v1 = 0
(4.22)
(4.23)
Wobei alle Wellen die Form exp(i(~k · ~r − ωt)) haben mögen. Für die weitere Rechnung
nehmen wir nun an, daß die Welle ~k = k~ex und ~v = v~ex erfüllen möge. Damit können
wir schreiben
γp0 ρ0 ikv1
ik
ρ0
iω
γp
0
v1
= k2
ρ0
−iωρv1 =
(4.24)
ω 2 v1
(4.25)
Das führt uns zur Lösung
ω
=
k
r
γp0
=
ρ0
r
γKT
= cs
M
(4.26)
was genau die Dispersionsrelation der bekannten Schallwelle ist.
4.4 Ionen-Schallwellen
Wenn man versucht Schallwellen in kollisionsfreien Plasmen anzuregen, hat man ein
Problem: Die gibt es da nämlich gar nicht. Die Ionen in Plasmen können aber immer
noch durch langreichweitige Kräfte wechselwirken. Da wir es mit Ionen zu tun haben,
handelt es sich dabei um niederfrequente Phänomene
∂~vi
mn
+ (~vi · ∇)~vi = −en∇φ − γKTi ∇n
(4.27)
∂t
Hier haben wir ein nicht-magnetisiertes Plasma angenommen, da das Phänomen der
Ionen-Schallwellen kein Magnetfeld voraussetzt. Als nächstes linearisieren wir die Gleichungen
−iωmn0 vi1 = −en0 ikφ1 − γKTi ikn1
(4.28)
Die Elektronen nehemn wir als masselos an und fordern für die Verteilung der Elektronen
eφ1
eφ1
= n0 1 +
+ ...
(4.29)
ne = n = n0 exp
KTe
KTe
42
4.4 Ionen-Schallwellen
um das Gleichgewicht der Kräfte herzustellen. Damit ist die Störung der Elektronen- als
auch der Ionenverteilung (in erster Ordnung)
n1 = n0
eφ1
KTe
(4.30)
Zusätzlich verwenden wir noch die Kontinuitätsgleichung
iωn1 = n0 ikvi1
(4.31)
Nach geschicktem Umformen erhält man anschließend
2
ω =k
2
KTe γKTi
+
m
m
(4.32)
Was sich als die Dispersionsrelation für die Ionen-Schallwelle herausstellt
Im Gegensatz zu Plasmaoszillationen, die eigentlich nur bei einer Frequenz auftreten,
sofern es nicht zu thermischen Korrekturen kommt, sind Ionen-Schallwellen Oszillationen
die sich mit einer konstanten Geschwindigkeit ausbreiten.
Diese Dispersionsrelation ist allerdings nicht vollständig korrekt, da wir sowohl die
~ endlich ist und gleichzeitig Quasi-Neutralität vorausAnnahme verwendet haben, daß E
gesetzt haben. Beides zusammen ist ein wenig schwierig, weswegen wir uns jetzt um eine
ein wenig detailliertere Betrachtung bemühen wollen
~ 1 = k 2 φ1 = 4πe(ni1 − ne1 )
∇·E
(4.33)
mit der Elektronendichte
ne1 =
eφ1
n0
KTe
(4.34)
was nach einigen wenigen Umformungen zu
φ1 (k 2 λ2D + 1) = 4πeni1 λ2D
(4.35)
wird. Nun noch schnell die Ionendichte aus der linearisierten Kontinuitätsgleichung
ni1 =
k
n0 vi1
ω
(4.36)
damit rechnen wir ein wenig durch die Gegend und schon hat man
ω2
KTe
1
γKTi
=
+
2
2
2
k
m 1 + k λD
m
(4.37)
Oh, da ist wohl etwas anderes. Da gibt es wohl eine Resonanz.
[Plot Elektron-Plasmawelle vs. Ionen-Schallwelle analog Chen 4-13]
43
4 Wellen in Plasmen
4.5 Elektrostatische Oszillationen senkrecht zum Magnetfeld
Zuerst einmal eine kurze Begriffsklärung von elektrostatisch, elektromagnetisch, parallel,
senkrecht, longitudinal und transversal: Alle diese Begriffe beziehen auf die Relation der
~ 1, B
~ 0 und B
~ 1.
Größen ~k, E
~ 0 zeigt
• Eine Welle ist parallel, wenn ~k in die Richtung von B
~ 1 zeigt
• Eine Welle ist longitudinal, wenn ~k in die Richtung von E
~1 = 0
• Eine Welle ist elektrostatisch wenn B
Die letzten beiden Bedingungen sind miteinander verknüpft. Betrachtet man die MaxwellGleichung
~˙ 1 ⇒ ~k × E
~ 1 = ωB
~1
~ 1 = −B
(4.38)
∇×E
so erkennt man leicht, daß wenn die Welle longitudinal ist, die linke Seite 0 ist. Damit
sollte dann wohl auch die rechte Seite 0 werden. Longitudinale Wellen sind damit wohl
elektrostatisch.
Wenden wir uns nun den Oszillationen der Elektronen senkrecht zum Hintergrundmagnetfeld zu. Die Ionen mögen zu schwer sein, um sich mitzubewegen und der Einfachheit
halber mögen die Elektronen kalt sein. Daraus ergibt sich dann für die Elektronen folgender Gleichungssatz
m
∂ve1
∂t
~ 1 + ~ve1 × B
~ 0)
= −e(E
∂ne1
+ n0 ∇ · ~ve1 = 0
∂t
~ 1 = −4πene1
∇·E
(4.39)
(4.40)
(4.41)
Jetzt wollen wir ausschließlich nach longitudinal Wellen suchen, also setzen wir die auch
an. Linearisieren gehört ohnehin zum Standardprogramm
−iωmvx = −eE − evy B0
(4.42)
−iωmvy = evx B0
(4.43)
−iωmvz
(4.44)
Weil Herr Chen und ich zum Faul zu schreiben sind, fehlen die Indices e und 1, die man
hier auch gar nicht benötigt. Geschicktes Umformen!
vx =
eE/imω
1 − Ω2 /ω 2
(4.45)
Wie gewohnt kann man Kontinuitäts- und Poissongleichung linearisieren und erhält
schlußendlich
ωp2
Ω2
(4.46)
1 − 2 E = 2E
ω
ω
44
4.6 Elektrostatische Ionenwelllen senkrecht zu B
woraus der versierte Physiker in Sekunden eine Dispersionsrelation zaubert
ω 2 = ωp2 + Ω2 = ωh2
(4.47)
Hier haben wir die sogenannte Obere Hybridfrequenz die bei allen elektrostatischen
Elektronenwellen senkrecht zu B auftritt. Für die Propagation entlang B ergibt sich
dasselbe Ergebnis wie ohne Magnetfeld, also eine Plasmaoszillation mit ωp .
Um sich das Ganze vorzustellen, kann man zuerst einmal annehmen, daß ohne Magnetfeld sich Kompression ausbildet. Die Bewegung der Teilchen wird nun durch das
Magnetfeld in Ellipsen gezwungen. Da zwei rückstellende Kräfte wirken, geht das nun
auch viel schneller vonstatten und wir haben eine höhere Frequenz.
[Jetzt noch schnell das Trievelpiece-Gould-Diagramm]
4.6 Elektrostatische Ionenwelllen senkrecht zu B
An sich ist das Schema bekannt, aber so ganz einfach wollen wir es uns an dieser Stelle
nicht machen. Statt brutalst möglich auf die Gleichung loszugehen und einfach überall
~ 0 = 0 zu setzen, gehen wir davon aus, daß ~k fast senkrecht zum Maden Term ~k · B
gnetfeld liegt. Und wieso den ganzen Quatsch? Na ja, wenn der Winkel zum Magnetfeld
exakt π/2 ist, haben die Elektronen keine Chance den Ladungsausgleich herzustellen.
Die mathematische korrekte Herleitung für den exakt senkrechten Fall werden wir noch
nachliefern, man kann sich aber leicht vorstellen, daß der im Plasma dann auch nicht so
erschreckend oft auftritt.
Nun zurück zum alten Trott. Ionenbewegungsgleichung
m
∂~vi1
~0
= −e∇φ1 + e~vi1 × B
∂t
(4.48)
Linearisieren
−iωmvix = −eikφ1 + eviy B0
(4.49)
−iωmviy = −evix B0
(4.50)
Umschachteln
vix
−1
ek
Ω2
=
φ1 1 − 2
mω
ω
(4.51)
Dann nimmt man noch ni1 aus der Ionen-Kontinuitätsgleichung und ne1 aus der BoltzmannVerteilung und schon landen wir bei
ω 2 = Ω2 + k 2 vs2
(4.52)
mit vs2 = KTe /m, wo wir stillschweigend davon ausgegangen sind, daß die Ionen kalt
sind. Das Ganze ist nahezu identisch zur vorherigen Herleitung für die Elektronen, nur
wird hier halt die Dispersionsrelation der Ionen-Schallwelle angenommen.
45
4 Wellen in Plasmen
So was passiert denn nun, wenn sich die Welle wirklich absolut senkrecht zum Magnetfeld bewegen will? Nun das Leben wird kompliziert, da ich nicht mehr einfach annehmen darf, daß die Elektronen der Boltzmann-Relation gehorchen. Wir müssten also
tatsächlich die Bewegungsgleichung der Elektronen lösen, selbst mit den Mördervereinfachungen,
die wir so gerne machen. Aber nun zu den Gleichungen
vix =
vex =
ni1 =
ne1 =
−1
ek
Ω2i
φ1 1 − 2
mi ω
ω
−1
Ω2
ek
φ1 1 − 2e
−
me ω
ω
k
n0 vi1
ω
k
n0 ve1
ω
(4.53)
(4.54)
(4.55)
(4.56)
Aus den letzten beiden Gleichungen folgern wir, daß vi1 = ve1 und nach ein wenig
Rumgewurschtel steht da schon
ω 2 = Ωe Ωi
(4.57)
Wie schon gesagt, gibt es, findet man aber nicht oft.
4.7 Elektromagnetische Wellen ohne Hintergrundmagnetfeld
Man kann sich jetzt kurz erinnern, daß es ja eine elektromagnetische Welle ohne Hintergrundfeld gibt, gemeinhin als Licht bezeichnet. Dispersionsrelation
ω 2 = c2 k 2
(4.58)
Sowas wird es ja wohl auch in Plasmen geben. Hier muß man aber beachten, daß sich
zu den Maxwell-Gleichungen im Vakuum noch ein Stromterm gesellt
~˙ 1
~ 1 = 4π ~j1 + E
∇×B
c
(4.59)
Schnell mal abgeleitet
˙1+E
~˙ 1 = 4π~j
~¨1
∇×B
(4.60)
c
Und nun? Noch eine Gleichung für die Ableitung des Magnetfeldes heranziehen
~1 = − 1 B
~˙ 1
∇×E
c
(4.61)
Man bilde sich ein Kreuzprodukt und schon ist man die Zeitableitung von B los.
2
~ 1 ) + k2 E
~ 1 = 4πiω ~j1 + ω E
~1
−~k(~k · E
c2
c2
46
(4.62)
4.8 Elektromagnetische Wellen senkrecht zum Hintergrundfeld
Da wir elektromagnetische Wellen wollen, muß es sich um transversale Wellen handeln
~ 1 = 0. Nun nehmen wir an, daß es die Ionen zu lahmarschig für elektround also ist ~k · E
magnetische Wellen sind, womit die Elektronen für den Strom ganz allein verantwortlich
sind
~j1 = −n0 e~ve1
(4.63)
Aus der Bewegungsgleichung der (kalten) Elektronen bekommen wir dann noch
m
∂ve1
∂t
~
= −eE
(4.64)
~1
eE
imω
(4.65)
~ve1 =
Woraus man schnell erkennt, daß
2
~1
~ 1 = 4πn0 e E
(ω 2 − c2 k 2 )E
m
(4.66)
Und schon haben wir eine neue Dispersionsrelation
2
ω 2 = ωpe
+ c2 k 2
(4.67)
Und jetzt haben wir den Schlamassel: Elektromagnetische Wellen durchqueren nicht
einfach ein Plasma, denn unterhalb von ωpe kommen die da gar nicht durch. Wir haben einen Cut-Off. Außerdem ist die Phasengeschwindigkeit auch noch größer als die
Lichtgeschwindigkeit (die Gruppengeschwindigkeit natürlich nicht).
Man kann die Dispersionsrelation verwenden, um die Dichte eines Plasmas zu bestimmen, indem man entweder ein Michelson-Interferometer verwendet (Zwei Strahlengänge
mit Phasendifferenz π einmal durchs Plasma, einmal nicht, Dispersion verändert Phasendifferenz).
4.8 Elektromagnetische Wellen senkrecht zum Hintergrundfeld
Im vorangegangenen Abschnitt hatten wir noch kein B-Feld im Hintergrund. Das soll
sich nun ändern! Allerdings ist mit “elektromagnetische Wellen senkrecht zum Hinter~ 0 und auch, daß E
~ 1 ⊥ ~k, uns
grundfeld” noch nicht alles geklärt: Wir wissen, daß ~k ⊥ E
~1 ⊥ B
~ 0 oder E
~1 k B
~ 0 . Das wollen wir nun in den nächsten
bleibt aber noch die Wahl ob E
Unterabschnitten ausführen.
4.8.1 Ordinary Wave
~1 k B
~ 0 sein. Das Magnetfeld liegt in z-Richtung und das E-Feld in xHier soll nun E
Richtung. Wir können nun dieselbe Wellengleichung wie vorher verwenden
~ 1 = 4πn0 eω~ve1
(ω 2 − c2 k 2 )E
(4.68)
47
4 Wellen in Plasmen
Für das E-Feld brauchen wir nur noch die z-Komponente, die wir aus
∂vez
= −eEz
(4.69)
∂t
gewinnen. Daraus erhalten wir dasselbe Ergebnis, wie schon für den Fall ohne Hintergrundmagnetfeld
2
ω 2 = ωpe
+ c2 k 2
(4.70)
m
Diese Welle wird in der Tradition der Festkörperphysik (Doppelbrechung) ordentliche
(ordinary) Welle genannt.
4.8.2 Extraordinary Wave
~1 ⊥ B
~ 0 , aber wie man schon
An sich kommt nun dasselbe Spiel wie vorher nur, daß E
~
erahnen kann, wird es nicht ganz so einfach. Statt nämlich E1 = E1~ey zu wählen, müssen
wir annehmen dürfen, daß die Welle elliptisch polarisiert sein kann (es hilft immer, daß
Ergebnis vorher schon zu kennen. . . )
~ 1 = Ex~ex + Ey ~ey
E
(4.71)
Nun noch schnell die linearisierte Elektronenbewegungsgleichung
~ + ~ve1 × B
~ 0)
−imω~ve1 = −e(E
Das kann man nun in Komponenten hinschreiben und nach vx und vy auflösen
−1
e
Ω
Ω2
vx =
−iEx − Ey
1− 2
mω
ω
ω
−1
e
Ω
Ω2
vy =
−iEy + Ex
1− 2
mω
ω
ω
(4.72)
(4.73)
(4.74)
Und schon wieder können wir die Wellengleichung verwenden, jetzt allerdings mit einem
potentiell longitudinalem Term
~ 1 + c2 kEx~k = 4πn0 eω~ve1
(ω 2 − c2 k 2 )E
(4.75)
Das können wir nun wieder in die x- und y-Komponenten von v aufteilen und erhalten
dann folgende Gleichung
ωp2 Ω
Ω2
2
2
Ey = 0
(4.76)
ω (1 − 2 ) − ωp Ex + i
ω
ω
ωp2 Ω
Ω2
2
2 2
2
Ex =
(4.77)
(ω − c k )(1 − 2 ) − ωp Ey − i
ω
ω
Theoretisch kann man das jetzt auf die harte Tour lösen, wir wissen aber, daß das System
ohnehin nur dann lösbar ist, wenn die Determinante verschwindet. Daraus folgt dann
die Dispersionsrelation
ω 2 − ωh2 − ((ωp2 Ω2e /ω)/(ω 2 − ωh2 ))
c2 k 2
=
ω2
ω 2 − Ω2
48
(4.78)
4.9 Cut-Off und Resonanz
Oder einfache
ωp2 ω 2 − ωp2
c2 k 2
=1− 2 2
ω2
ω ω − ωh2
(4.79)
4.9 Cut-Off und Resonanz
Bei der Betrachtung von Dispersionsrelationen kann man zwei wichtige Phänomene beobachten: Cutoff und Resonanz. Ein Cut-Off tritt auf, wenn der Brechungsindex gegen
0 geht (n2 = c2 k 2 /ω 2 ). Eine Resonanz tritt dann auf, wenn der Brechungsindex gegen
unendlich geht. Wellen werden an Cut-Offs reflektiert und Resonanzen absorbiert.
Um nun die Dispersionsrelation der außerordentlichen Welle auf besagte Phänomene
zu untersuchen, gehen wir folgendermaßen vor: Die Resonanzen finden wir, indem wir k
gegen unendlich gehen lassen und die endlichen ω dazu suchen. Offensichtlich tritt dies
für
ωh2 = ωp2 + Ω2 = ω 2
(4.80)
auf. Für die Resonanz gehen dann Phasen- und Gruppengeschwindigkeit gegen 0 und
wir haben es mit einer reinen Oszillation zu tun.
Auch den Cut-Off kann man leicht finden, indem man k = 0 annimmt. Daraus erhält
man
ω 2 ∓ ωΩ − ωp2 = 0
(4.81)
Hier ergeben sich gleich zwei Cut-Off-Frequenzen
ωR =
ωL =
q
1
(Ω + Ω2 + 4ωp2 )
2
q
1
(−Ω + Ω2 + 4ωp2 )
2
(4.82)
(4.83)
Hier sei ω immer positiv und k beschreibe die Propagationsrichtung.
4.10 Elektromagnetische Wellen parallel zum Hintergrundfeld
Nun gut, wir wissen jetzt, daß wenn wir elektromagnetische Wellen parallel zum Hin~ in x und
tergrundfeld haben wollen, k in z-Richtung liegt, woraus direkt folgt, daß E
~ 1 liegt sowohl senkrecht zu k als auch E).
~ Nun wählen wir
y-Richtung liegen kann (B
einen Ansatz, wie wir ihn schon bei der außerordentlichen Welle verwendet haben, allein
die Richtung von k sei anders
(ω 2 − c2 k 2 )Ex =
(ω 2 − c2 k 2 )Ey =
ωp2
(Ex − iΩ/ωEy )
1 − Ω2 /ω 2
ωp2
(Ey + iΩ/ωEx )
1 − Ω2 /ω 2
(4.84)
(4.85)
49
4 Wellen in Plasmen
Es folgt eine Reihe wahnsinniger Umformungen, die man sich auch an den eigenen fünf
Fingern abzählen kann.
2
R wave
n
=
L wave
n2 =
ωp2
c2 k 2
=1−
ω2
1 − (Ω/ω)2
ωp2
c2 k 2
=
1
−
ω2
1 + (Ω/ω)2
(4.86)
(4.87)
Die Bezeichnung der Wellen bezieht sich darauf, daß es es um zirkular polarisierte Wellen
handelt, der Polarisationsrichtung links- oder rechtshändig ist.
Wir könnten jetzt das Ganze detailliert analysieren. Aber eigentlich bringt uns das
nicht weiter, deshalb verschieben wir das auf einen Punkt, wo wir die Dispersionsrelation
unter Berücksichtigung.
4.11 Fluidansatz
Um die Wellengleichung (??) zu lösen, wählt man den Ansatz
~j = ~j ext + ~j ind
(4.88)
bei dem der Strom aus einem durch Störungen im elektrischen Feld induzierten Anteil
und einem externen Anteil beschrieben wird. Der induzierte Anteil ~j ind gehorcht dem
ohmschen Gesetz (?)
~
~j ind = σ̂ E
(4.89)
wobei σij der Leitfähigkeitstensor ist. Es ist nützlich, das ohmsche Gesetz in eine Form
zu bringen, in der der Dielektrizitätstensor ij verwendet wird. Zwischen den beiden
Tensoren besteht folgender Zusammenhang:
ij = δij +
4πi
σij
ω
(4.90)
Setzt man nun Gl. (4.89) in Gl. (??) ein, so erhält man
Λij Ej = −
4πi ext
ji
ω
(4.91)
Der Maxwell-Operator Λij ist dabei definiert als
Λij =
c2
(ki kj − δij k 2 ) + ij
ω2
(4.92)
Im Verlauf der weiteren Berechnungen wird der externe Anteil ~j ext vernachlässigt, da
durch die hohe Leitfähigkeit des interstellaren Mediums keine statischen elektrischen
Felder entstehen können, die einen solchen externen Strom erzeugen können.
Nun soll der Dielektrizitätstensor, wie vorher beschrieben, mit Hilfe einer fluiddynamischen Theorie hergeleitet werden, wobei hier die Berücksichtigung eines Elektronen-
50
4.11 Fluidansatz
und Protonenfluids genügt. Dazu wird die Bewegungsgleichung eines Fluids aus Teilchen
der Masse mα und der (vorzeichenbehafteten) Ladung qα benötigt
mα
~
d~uα
~ + qα ~uα × B
= qα E
dt
c
(4.93)
wobei der Index α die Teilchenspezies kennzeichnet. Nach einer Fouriertransformation
lässt sich Gl. (4.93) nach ~uα auflösen
!
qα
qα
Bk
ujα ωδij − i
=i
Ei
(4.94)
Ωα ijk
~
|qα |
m
α
|B|
Hier wird die Zyklotronfrequenz Ωα eingeführt, die definiert ist als
Ωα =
|qα |B
mα c
(4.95)
Aus den berechneten Fluidgeschwindigkeiten der einzelnen Spezies läßt sich jetzt der
Strom bestimmen.
X
qα nα (~uα )i
(4.96)
ji =
α
Diese Gleichung soll nun in die Form des ohmschen Gesetzes gebracht werden. Dazu
wird der Tensor τij eingeführt, für den gelten soll:
(ωδij − i
qα
Bk
)τ = δil
Ωα ijk
~ ij
|qα |
|B|
Daraus folgt die Form des Tensors
τijα = i
ω2
ω 2 −Ω2α
sgn(qα )ωΩα
ω 2 −Ω2α
α )ωΩα
i sgn(q
ω 2 −Ω2
0
0
α
ω2
ω 2 −Ω2α
0
(4.97)
0
1
(4.98)
Unter Verwendung dieses Tensor wird Gl. (4.94) nach ~uα aufgelöst:
uαi = i
qα
τij Ej
mα
(4.99)
In Gl. (4.96) eingesetzt liefert dies:
ji =
X iq 2 nα
α
α
mα ω
Ej τij
(4.100)
Diese Gleichung hat nun dieselbe Form wie das ohmsche Gesetz, daher läßt sich der
Leitfähigkeitstensor direkt ablesen:
σij =
iqα2 nα
τij
mα ω
(4.101)
51
4 Wellen in Plasmen
4.11.1 Dispersionsrelation im kalten, magnetisierten Plasma
Durch die Kenntnis von τij sind der Dielektrizitätstensor ij und der Maxwell-Operator
Λij bekannt. Somit kann man nun die Lösung des Gleichungssystems
Λij Ei = 0
(4.102)
suchen. Die Bedingung zur Lösbarkeit dieses Systems ist
det Λ = 0
(4.103)
Es ist üblich, den Dielektrizitätstensor ij durch die Stix-Parameter (?) auszudrücken,
S −iD 0
S
0
ij = iD
(4.104)
0
0
P
S − n2 cos2 θ −iD
n2 sin θ cos θ
iD
S − n2
0
⇒ Λij =
(4.105)
2
2
2
n sin θ cos θ
0
P − n sin θ
~ wobei das geordnete Magnetfeld entlang der z-Achse
θ ist der Winkel zwischen ~k und B,
orientiert ist. Außerdem wird der Brechungsindex n verwendet:
n=
ck
ω
(4.106)
Die Stix-Parameter lassen sich aus den vorhergehenden Überlegungen leicht ermitteln:
1
(R + L)
2
1
D =
(R − L)
2
2
X ωpα
ω
R = 1−
2
ω ω + Ωα
α
S =
L = 1−
2
X ωpα
α
P
= 1−
ω
ω 2 ω − Ωα
2
X ωpα
α
ω2
Dabei wurde die Plasmafrequenz ωpα definiert:
s
4πnα qα2
ωpα =
mα
(4.107)
(4.108)
(4.109)
(4.110)
(4.111)
(4.112)
Mit den Stix-Parametern schreibt sich die Determinante als
det Λ = An4 − Bn2 + C
52
(4.113)
4.11 Fluidansatz
mit den Definitionen
A = P cos2 θ + S sin2 θ
2
2
2
(4.114)
2
B = (S − D ) sin θ + P S(1 + cos θ)
2
2
C = P (S − D )
(4.115)
(4.116)
Die Lösung dieser biquadratischen Gleichung ist offensichtlich
B±F
2A
(4.117)
p
B 2 − 4AC
(4.118)
n2 = n2± =
wobei
F
=
ist. Die exakte Lösung ist in den meisten Fällen zu kompliziert, als daß sie verwendet
werden könnte. Da allerdings in dem betrachteten Wellenzahlbereich der Unterschied
zwischen der exakten Lösung und der Näherung zu vernachlässigen ist, werden statt der
exakten Lösung Näherungen für verschiedene Wellenzahlbereiche verwendet. In diesem
Fall also ω Ωi . Die X- und O-Moden als Grenzfälle für θ = 0 bzw. θ = π/2, sowie die
Whistler-Mode (die sich im Bereich Ωe > ω > Ωi befinden) finden in dieser Arbeit keine
Beachtung. Einzig die Lösung der Alfvén-Mode
2 2
ω 2 = vA
k cos2 θ
(4.119)
und der schnellen magnetosonischen Mode
2 2
ω 2 = vA
k
(4.120)
werden im Weiteren betrachtet. Die Alfvén-Geschwindigkeit ist definiert über:
vA = √
B0
4πmi ni
(4.121)
Man kann nebenbei sehr schnell sehen, daß für den Fall paralleler Propagation sich
die Dispersionsrelationen
n2 = R
n
2
= L
(4.122)
(4.123)
ergeben.
[Hier tollen Plot von Dispersionrelationen einfügen]
4.11.2 Dispersionsrelation im warmen, magnetisierten Plasma
Für den Fall des warmen Plasmas müssen zum vorherigen Abschnitt analoge Ansätze
gefunden werden. Eine vollständige Lösung ist nur im Rahmen einer kinetischen Theorie zu erwarten. Da hier allerdings nur ein bestimmter Wellenlängenbereich interessant
53
4 Wellen in Plasmen
ist, nämlich die niederfrequenten Wellen und außerdem der Fall eines kleinen Plasma-β
zutrifft (β ist das Verhältnis kinetischer zu magnetischer Energiedichte), kann man an
dieser Stelle den approximativen Ansatz von ? wählen:
1
i Ωωi
0
c2 −i ω
1
−i Ωi tan θ
ij =
(4.124)
Ωi
ω
2
2
2
vA
Ωi
Ωi
c
0
i ω tan θ − ω2 1 − n2 v2 cos2 θ
s
0
0
0
r
2
π ωpi
c
0 2 ωnVe sin θ
−i Ωωe tan θ
+i
Ωe c
2
2 ω nVe cos θ
c2 cos2 θ
ω
0
i Ωe tan θ
n2 V 2
e
Mit diesem phänomenologischen Ansatz werden thermische Effekte in die Stix-Parameter
inkorporiert, und es ergeben sich nun drei Lösungen: Neben der Alfvén-Welle und der
schnellen magnetosonischen Welle, die auch im kalten Plasma zu finden sind, gibt es
eine langsame magnetosonische Welle. Die Dispersionsrelationen der beiden magnetosonischen Wellen sind dann:
1
k2 v2
schnelle magnetosonische Welle
A 1− v2s2 sin2 θ
v
2
A
(4.125)
ω =
1
2 v 2 cos2 θ
langsame
magnetosonische
Welle
k
2
s
v
1+ s sin2 θ
v2
A
Hierbei wurde die Schallgeschwindigkeit eingeführt, die in isothermen Plasmen definiert
ist als:
r
kB Te
vs =
(4.126)
mi
Neben der Methode von Stix zur Bestimmung der Dispersionsrelationen, ist es üblich,
die Wellengleichung durch Störung der MHD-Gleichungen zu lösen. Im nächsten Abschnitt wird dieses Verfahren detailliert beschrieben. Der Vollständigkeit halber wird
hier bereits das Ergebnis für die Dispersionsrelation vorweggenommen.
k 2 v 2 cos2 θ
Alfvén-Welle
k2 v2A p
A
2
2
(1 + β) − 4β cos θ
schnelle magnetosonische Welle
ω2 =
2 (1 + β) +
p
2
2
k vA (1 + β) − (1 + β)2 − 4β cos2 θ
langsame magnetosonische Welle
2
(4.127)
54
5 Kinetische Theorie
In diesem Kapitel soll nun die vollständige Beschreibung und somit die BoltzmannVlasov hergeleitet werden.
5.1 Hamilton-Beschreibung
Zuerst wollen wir unser Plasma mit einem Hamilton-Operator beschreiben H = H(q1 , q2 , . . . , qf , p1 , p2 , . . . , pf ).
Die qi , pi sind die generalisierten Koordinaten und Impulse der Teilchen, für freie Teilchen
hat jedes Teilchen jeweils drei Orts- und Impulskoordinaten.
Für die Zeitentwicklung des Systems ergibt sich dann die Hamiltonsche Bewegungsgleichung
∂
H
∂pi
∂
H
= −
∂qi
q̇i =
(5.1a)
ṗi
(5.1b)
Der von den (3 + 3)n Koordinaten aufgespannte Raum ist der sogenannte Γ-Raum, jeder
Zustand des Systems wird durch einen Punkt im Γ-Raum eindeutig beschrieben. Da die
Hamiltonschen-Bewegungsgleichungen erster Ordnung in der Zeit sind, ist dem Punkt
nur einzige Trajektorie verbunden, die die Zeitentwicklung eindeutig beschreibt.
Jedem Punkt im Γ-Raum ist eine Geschwindigkeit assoziiert
~v = ~v (q̇1 , q̇2 , . . . , q̇f , ṗ1 , ṗ2 , . . . , ṗf )
(5.2)
Da eng benachbarte Punkte im Γ-Raum ähnliche Systeme beschreiben, entwickeln sich
diese auch ähnlich (Satz von Liouville). Nun wird eine Wahrscheinlichkeitsdichte für die
Systeme entwickelt, die im Γ-Raum eine Kontinuitätsgleichung erfüllen soll
∂ρ
∂
+
· (ρ~v ) = 0
∂t
∂Γ
(5.3)
Dabei wurde die partielle Ableitung im Γ-Raum eingeführt
∂
= ∇Γ =
∂Γ
∂
∂
∂
∂
∂
∂
,
,...
,
,
,...
∂q1 ∂q2
∂qf ∂p1 ∂p2
∂pf
(5.4)
55
5 Kinetische Theorie
Setzt man dies nun in die Kontinuitätsgleichung ein, so erhält man
f X
∂ q̇i
∇Γ · ~v =
i=1
f X
∂ ṗi
+
∂qi ∂pi
(5.5)
∂ ∂H
∂ ∂H
=
−
∂qi ∂pi
∂pi ∂qi
i=1
f X
∂2H
∂2H
=
−
=0
∂qi ∂pi ∂pi ∂qi
i=1
woraus folgt
∂
∂
· (ρ~v ) = ~v ·
ρ
∂Γ
∂Γ
(5.6)
Damit folgt nun
∂
∂
+ ~v ·
∂t
∂Γ
ρ=
dρ
=0
dt
Was aus der Tatsache folgt, daß die Zahl der Systeme eine Erhaltungsgröße ist.
Berechnet man das Volumenintegral der Phasenraumdivergenz
Z
I
~
∇Γ · ~v dτ = ~v · dS
Γ
(5.7)
(5.8)
Γ
wobei
~ =
~v · dS
dτ
dt
dτ
d
τ
dt
= 0
=
f
Y
(5.9)
(5.10)
dqi dpi
(5.11)
i=1
Unter Berücksichtigung dieser Ergebnis läßt sich die Kontinuitätsgleichung mit den
Poisson-Klammern schreiben
dρ
∂ρ
=
+ [ρ, H]
(5.12)
dt
∂t
Und dies ist eine Form des Liouville-Theorems.
Zur Herleitung der Vlasov-Gleichung versuchen wir jetzt das Liouville-Theorem anzuwenden. Als erster Zwischenschritt soll dabei das dünne neutrale Gas betrachtet werden. Dieses unterscheidet sich vom Plasma allerdings durch das Fehlen langreichweitiger
Kräfte.
Nach Bogoliubov läßt sich die Boltzmann-Gleichung finden, wenn man eine Potenzreihenentwicklung nach dem Parameter a durchführt
a = nr03
56
5.1 Hamilton-Beschreibung
n ist die Dichte und r0 die Reichweite der molekularen Kräfte. a ist für verdünnte Gase
klein gegen 1.
F~
∂f
∂t f + ~v ∇x f + ∇v f =
m
∂t coll
(5.13)
Für Flüssigkeiten ergibt sich ein großes 1, das ist gleichbedeutend mit einer erhöhten
Wahrscheinlichkeit von Kollisionen mit 3 oder 4 Teilchen. Da in der Boltzmann-Gleichung
nur Binärstöße berücksichtigt werden, ist die Beschreibung nicht akkurat.
In Plasmen ergibt sich ein sehr großer Parameter a aus der Tatsache, daß die elektromagnetischen Kräfte eine unbegrenzte Reichweite haben. Dies wird aber durch die
Abschirmung dieser Kräfte relativiert. Es ergibt sich eine sogenannte Debye-Sphäre um
die herum Teilchen die Kräfte abschirmen. Der Radius dieser Sphäre hängt von dem
Verhältnis von kinetischer und elektromagnetischer Energie ab
r
kB T
δ=
(5.14)
4πne2
Damit ist die Reichweite der Kräfte auf die Debye-Sphäre begrenzt
a = nδ 3
(5.15)
a ist dann zwar immer noch ein großer Parameter, aber jetzt drehen wir einfach die
Argumentation um: Wir nehmen jetzt an, daß die große Zahl von Teilchen ein Argument
für glatte großskalige Felder ist. Das läßt sich zurückführen auf die Idee, daß nur bei
kohärenter Bewegung signifikante Kräfte auftreten.
Damit werden die intermolekularen Kräfte auf makroskopische Felder abgebildet. Dies
entspricht dem Bild eines Teilchens im Potential anderer Teilchen. Dieses Potential setzt
sich dann wiederum aus der unabhängigen Bewegung der Teilchen durch makroskopische
Summation zusammen. Von der Methodik entspricht dies dem Übergang vom binären
Stoßoperator der Boltzmann-Gleichung zu einem Feldoperator.
Um diesem Konzept treu zu bleiben soll nun neben dem Γ-Raum der µ-Raum eingeführt werden. Während der Γ-Raum das Verhalten aller Teilchen beschreibt, bezieht
sich der µ-Raum auf Einzelteilchen.
Nun betrachten wir eine Verteilungsdichte im µ-Raum für die gilt
fα (~x, ~v , t)d3 x × d3 v
(5.16)
ist die Teilchenzahldichte im Intervall
(~x, ~v ), (~x + d~x, ~v + d~v )
womit wir das Liouville-Theorem in der Form
∂
∂
∂
fα +
(vi fα ) +
(ai fα ) = 0
∂t
∂xi
∂vi
(5.17)
57
5 Kinetische Theorie
annimmt. Die Beschleunigung ai ist dann über die großskaligen Felder gegeben
eα ~
1
~
aα =
E(~x, t) + ~v × B(~x, t)
mα
c
(5.18)
Damit kann man eine analoge Form zur Boltzmann-Gleichung annehmen, wenn man
annimmt, daß ∂aαi /∂vi = 0 ist. (Dies ist normalerweise bei der Lorentz-Kraft der Fall)
∂t fα + ~v ∇x fα + aαi ∇v f = 0
(5.19)
Wichtig ist hierbei die Tatsache, daß auf der rechten Seite keine Stoßterme zu finden
sind.
Zur Lösung der Vlasov-Gleichung benötigt man dann noch den vollständigen Satz von
Maxwell-Gleichung um das System selbstkonsistent zu gestalten
~ = −1 ∂ B
~
∇×E
c ∂t
~ = 4π ~jext + 1 ∂ D
~
∇×B
c
c ∂t
~ = 0
∇·B
~ = 4πρext
∇·D
(5.20a)
(5.20b)
(5.20c)
(5.20d)
~ = ·E
~ + 4π P~
D
Z
∂ ~X
~
P
eα fα~v d3 v
J =
∂t
α
X Z
ρ =
eα fα d3 v = −∇ · P~
(5.20e)
(5.20f)
(5.20g)
α
5.2 Mikroinstabilitäten
Mit der nun gewonnenen Beschreibung des Plasmas über über die Vlasov-Gleichung kann
man endlich kinetische Effekte beschreiben, die bisher unberücksichtigt geblieben sind.
Einer der wichtigsten Effekte hierbei ist die Landau-Dämpfung.
Wir wollen uns zuerst einmal nur einem einfachen durch die Vlasov-Gleichung beschriebenen System widmen: Longitudinalwellen mit kleiner Amplitude mit einem statischen
Ionenhintergrund. Für dieses System reicht folgende Untermenge der Gleichungen völlig
aus:
∂
e ~
f + ~v · ∇f − E
· ∇v f = 0
(5.21a)
∂t
m
Z
∇ · E = 4π n0 −
f d3 v
(5.21b)
Als gute Plasmaphysiker linearisieren wir die Gleichungen
e ~ ∂f0
= 0
i(~k · ~v − ω)f1 − E
1·
m
∂~v
Z
~
~
ik · E1 = −4πen0 f1 d3 v
58
(5.22a)
(5.22b)
5.2 Mikroinstabilitäten
Aus dieser Gleichung kann man direkt durch Einsetzen folgern
Z
~
~k · E
~ 1 + ω 2 d3 v E1 (∂f0 /∂~v ) = 0
p
ω − ~k · ~v
(5.23)
Da wir unsere Betrachtung von vorneherein auf longitudinale Wellen beschränkt haben, wissen wir, daß E nur die Projektion von sich selber auf k sein kann
~ ~
~1 = E
~ = E · k ~k
E
k2
(5.24)
woraus folgt
ωp2
1+ 2
k
Z
~k · (∂f0 /∂~v )
d3 v
ω − ~k · ~v
!
~ · ~k = 0
E
(5.25)
dabei ist die in Klammern stehende Größe die Dielektrizitätsfunkion . Da wir die An~ · ~k 6= 0. Um also die
nahme gemacht haben, daß longitudinale Wellen vorliegen, ist E
obenstehende Gleichung zu erfüllen muß
Z
~k · (∂f0 /∂~v )
ωp2
=1+ 2
d3 v
=0
(5.26)
k
ω − ~k · ~v
gelten. Diese Gleichung ist durch die Singularität im Nenner schwierig zu bearbeiten.
Physikalisch entspricht diese Singularität der Resonanz von Teilchen der Geschwindigkeit
v mit Wellen ω und k.
5.2.1 Langwellen-Näherung
Um die Dispersionsrelation aus der vorhergehenden Berechnung zu ermitteln, gehen wir
zuerst von dem vereinfachten Fall der Langwellen-Näherung aus. Hierbei soll die Breite
der thermischen Verteilung vT klein sein und die Frequenz ω = ωp sein. Aus dem letzten
Abschnitt wissen wir schon, daß für den Fall longitudinaler Wellen = 0 gelten soll.
Da wir uns nun schon auf longitudinale Wellen beschränkt haben, können wir auch
~ und ~k in x-Richtung
gleich über die transversalen Richtungen integrieren. Mögen E
liegen
Z Z
fl =
f (x, v, t)dvy dvz
(5.27)
Damit haben wir zwei von drei Dimensionen unseres Problems erschlagen und da wir
ohnehin über weite Teile integriert haben, können wir auch gleich die Indizes für gestörte
und ungestörte Verteilung wegschmeißen.
Z
ωp2 +∞ ∂f0 /∂v
=1+
dv
(5.28)
k −∞
ω − kv
Nun noch schnell partiell integrieren
Z +∞
ωp2
f0 (v) ∞
k
= 1+
|
−
f0 (v)
k ω − kv v=−∞
(ω − kv)2
−∞
= 0
(5.29)
59
5 Kinetische Theorie
Da wir annehmen dürfen, daß die Verteilungsfunktion in der Unendlichkeit verschwindet,
kann man den ersten Term auch gleich verschwinden lassen
ωp2
Z
+∞
dv
−∞
f0 (v)
=1
(ω − kv)2
(5.30)
Der wahre Physiker entwickelt jetzt nach Potenzen von kv/ω
ωp2
ω2
Z
+∞
−∞
kv
dvf0 (v) 1 + 2
+3
ω
kv
ω
!
2
+ ...
=1
(5.31)
Jetzt kann man Annahmen über die Verteilungsfunktion f0 (v) machen, am besten wir
nehmen mal die Maxwell-Verteilung (gerade, einfaches Maximum) und schon verschwindet die Hälfte aller Terme
ωp2
ω2
Z +∞
k
2
1+3
v f0 (v)dv + . . .
= 1
ω
−∞
ωp2
k
2
1
+
3
hv
i
ω2
ω
(5.32a)
(5.32b)
Nun also zur Maxwell-Verteilung
m
mv 2
exp −
f0 (v) =
2πkB Te
2kB Te
k
T
B e
hv 2 i =
m
kB Te 2
hv 4 i = 3
m
r
(5.33a)
(5.33b)
(5.33c)
Aus der Tatsache, daß wir die Taylor-Reihe ausgeführt haben sollte auch gelten v < ω/k,
zusätzlich soll die Geschwindigkeit noch unter der thermischen Geschwindigkeit liegt.
Damit ist die Dispersionsrelation in niedrigster Ordnung
ω 2 = ωp2
(5.34)
Im nächsten Schritt setzen wir diese Näherungslösung in die nächste Korrektur ein
ω 2 ' ωp2 + 3k 2 hv 2 i = ωp2 (1 + 3λ2D k 2 )
(5.35)
Eine Folge dieser Änderung ist, daß die longitudinale Welle nun eine endliche Gruppengeschwindigkeit besitzen
v2
∂ω
vG =
=3 Tk
(5.36)
∂k
ωP
60
5.2 Mikroinstabilitäten
5.2.2 Landau-Dämpfung
Erster Versuch
Für den Fall der Langwellendämpfung haben wir einen Korrektur-Term für die Dispersionsrelation gefunden, der von k 2 abhing. Im nun folgenden Abschnitt nehmen wir an,
daß es eine Lösung der Form
ω = ωr + iγ
(5.37)
Wobei der Imaginärteil γ ωr
Nun soll die bekannte Plemelj-Formel verwendet werden (Cauchy-Integral) kann man
die Dielektrizitätsfunktion mit Hilfe des Principal Value beschreiben, wobei es an der
Stelle ω = ωr ausgewertet wird
ωp2 0 ωr (ωr , k) = P (ωr , k) − iπ 2 f0
k
k
(5.38)
Nun kann man die Frequenz um den Dämpfungsteil erweitern
ωp2 0 ωr ∂
(ωr + iγ, k) = P (ωr , k) − iπ 2 f0
+ iγ
k
k
∂ω ω=ωr
(5.39)
Dabei haben wir letztlich nur eine Entwicklung um den Punkt ωr gemacht. Für die
Ableitung im letzten Term ergibt sich dann
∂
iγ
∂γ
ω=ωr
∂γ
∂ω
1
∂
= iγ
∂γ
i
ω=ωr
∂
= γ
∂γ ω=ωr
∂r
∂i
= γ
+i
∂γ
∂γ ω=ωr
(5.40)
Hieraus ergibt sich auch eine korrekte des Realteils, die aber auf Grund der Bedingung
γ ωr vernachlässigt wird. Wenn nun die Bedingung = 0 für die Longitudinalwellen
erfüllt sein soll, müssen sich der Imaginärteil und der Pol aufheben. Dazu setzen wir
jetzt die Cauchy-Riemann-Bedingung an (Voraussetzung: analytische Funktion)
∂i
∂r
=
∂γ
∂ωr
(5.41)
Daraus folgt dann
γ=
ωp2 0 ωr ∂r
πf
/
k2 0 k
∂ωr
(5.42)
61
5 Kinetische Theorie
Zweiter Versuch: Anfangswertproblem
Der eigentlich klassische Ansatz zur Lösung der Vlasov-Gleichung (für Longitudinalwellen) ist die Lösung des Anfangswertproblems nach Landau.
Zuerst soll in diesem Zusammenhang die Laplace-Transformation eingeführt werden
Z ∞
exp(−pt)G(t)dt
(5.43)
L(G(t)) = G(p) =
0
natürlich braucht man auch die Inversion dieser Transformation
Z σ+i∞
1
L−1 (G(p)) = G(t) =
exp(pt)G(p)dt
2iπ σ−i∞
(5.44)
Deutlich erkennt man, daß man entlang einer Gerade in der imaginären Ebene integriert
(das wird noch wichtig). Der Realteil von p möge vor jeder Verformung der Integrationslinie positiv sein.
[Fig 1]
Bisher haben wir angenommen, die zeitliche Variation unserer Größen möge wie exp(i(kx−
ωt)) verlaufen. In der jetzt durchgeführten Laplace-Transformation kann der Faktor
exp(−iωt) mit dem Faktor exp(pt) identifiziert werden.
Die bisherigen von uns gefundenen Moden lassen sich als Polstellen nach der LaplaceTransformation wiederfinden und durch Berechnung der Residuen bestimmen. Aus den
Voraussetzungen für p kann man nun folgern
exp(−iωt) = exp(−iωr t) exp(γt)
(5.45)
also γ > 0, analog für den Fall der umgekehrten Zeitabhängigkeit.
Nun also zur Laplace-Transformation der Vlasov-Gleichung
pf1 − f1 (0) + ikvf1 −
e ∂f0
E
m ∂v
= 0
(5.46)
Z
ikE = −4πn0 e
f1 dv
Wie jeder weiß, gilt für Laplace-Transformationen
∂G(t)
L
= pL(G(t)) − G(0)
∂t
= pG(p) − G0
und schon haben wir einen wundervollen neuen Satz an Gleichungen
1
e
∂f0
f1 (k, v, 0) + E(k, p)
f1 (k, v, p) =
p + ikv
m
∂v
Z +∞
4πn0 ei
f1 (k, v, 0)
E(k, p) =
dv
k
p + ikv
−∞
Z
ωp2 ∞
f 0 (v)
(k, p) = 1 − i
dv 0
k −∞ p + ikv
62
(5.47)
(5.48a)
(5.48b)
(5.49a)
(5.49b)
(5.49c)
5.2 Mikroinstabilitäten
Nun soll noch eine zusätzliche Bedingung gestellt werden: f und seine Ableitungen
sollen analytische Funktionen sein. Nun können wir das elektrische Feld schreiben als
R
f1 (k,v,0)
Z σ+i∞
4πn0 ei +∞
1
k
−∞ dv p+ikv
E(k, t) =
dp exp(pt)
(5.50a)
ω 2 R +∞
f00 (v)
2πi σ−i∞
1 − k2p −∞ dv p+ikv
(5.50b)
Sind nun die Verteilungsfunktionen f analytische, sind alle Singularitäten die Polstellen der Nenner. Deshalb nimmt sich einfach der Integrationskurve an und verformt sie
dergestalt, daß wir die Polstellen umgehen.
Im speziellen nehmen wir an, daß die Polstellen gegeben durch
(k, p) = 0
(5.51)
links der imaginären p-Achse liegen, dann folgt
E(k, t) =
X
Z
Rj exp(pj (k)t) +
j
−σ 0 +i∞
dp
−σ 0 +i∞
exp(pt)
E(k, p)
2πi
(5.52)
die pj (k) sind die Nullstellen der Dielektrizitätsfunktion und das σ 0 ist so bestimmt, daß
der Integrationsweg links der imaginären p-Achse liegt. Die Rj sind die Residuen
Rj = lim (p − pj )E(k, p)
(5.53)
p→pj
Um das Integral müssen wir uns keine Gedanken mehr machen, da es für t → ∞ verschwinde (−σ 0 kann beliebig negativ gewählt werden!).
Im nächsten Schritt soll nun die Dämpfungsrate für die Landau-Dämpfung bestimmt
werden. Dazu gehen wir zurück auf den Ansatz
pt = −iωt ⇒ pj (k) = −iωj (k) − γj (k)
(5.54)
womit natürlich gilt
E(k, t) '
X
Rj exp(−iωj (k)t) exp(−γj (k)t)
(5.55)
j
Wenn wir nun die Definition des elektrischen Feldes einsetzen, so erhalten wir
R
Z −∞+iσ
f1 (k,v,0)
4πn0 e +∞
1
k
−∞ dv kv−ω
E(k, t) =
d(−iω) exp(−iωt)
ω 2 R +∞
f00 (v)
2πi +∞+iσ
1 − k2p −∞ dv kv−ω
R
f1 (k,v,0)
Z +∞+iσ
4πn0 e +∞
1
k
−∞ dv v−ω/k
dω exp(−iωt)
=
ω 2 R +∞
f 0 (v)
2π −∞+iσ
1− p
dv 0
k2
−∞
(5.56)
v−ω/k
[Figure 3]
63
5 Kinetische Theorie
Nun ändern wir wie schon vorher den Integrationspfad derart, daß wir uns in der negativen imaginären Halbebene befinden und zwar soweit, daß wir unterhalb aller Polstellen
verlaufen.
Dazu ist es notwendig, die Funktion E analytisch im negativ imaginären fortzusetzen.
Es wird dabei angesetzt
ωp2
(ω, k) = 1 − 2 h(ω/k) = 0
R k
f00
+∞
v−ω/k dv
−∞
R +∞ f00
h(ω/k) =
P −∞ v−ω/k
dv + iπf00 (ω/k) sgn k
R
0
+∞ f0 dv + 2iπf 0 (ω/k) sgn k
−∞ v−ω/k
0
(5.57a)
=ω > 0
=ω = 0
(5.57b)
=ω < 0
Nun machen wir zuerst den Ansatz, daß γ ωr und setzen die Näherung =ω = 0 an.
Daraus folgt
k2
= h(ω/k)
(5.58)
ωp2
Setzt man den Ansatz für h(ω/k) mit =ω = 0 ein (und verwendet die Ergebnisse aus
dem vorhergehenden Kapitel über die Langwellennäherung)
Z +∞
f 0 (v)
+ iπf00 (ω/k) sgn k
(5.59a)
h(ω/k) = P
dv 0
v
−
ω/k
−∞
Z +∞
f0 (v)
+ iπf00 (ω/k) sgn k
(5.59b)
= P
dv
(v − ω/k)2
−∞
k2
k 2 hv 2 i
'
1+3
+ iπf00 (ω/k) sgn k
(5.59c)
ω2
ω2
Jetzt haben wir Real- und Imaginärteil
ω 2 ω 2
k 4 hv 2 i
p
r
=
1+3
(5.60a)
k
k
ω2
γ
π ωr 3 0 ωr =
f0
sgn k
(5.60b)
k
2 k
k
Ob die Wellen gedämpft werden hängt nun alleine vom Vorzeichen der Ableitung der
Verteilungsfunktion ab.
Bei der physikalische Deutung dieser Abhängigkeit argumentiert man folgendermaßen:
Bei einem positiven Vorzeichen der Ableitung gibt es mehr Teilchen, deren Geschwindigkeit über der Phasengeschwindigkeit der Welle liegen und es wird Energie von den
Teilchen an die Welle übertragen. Bei umgekehrten Vorzeichen verläuft die Argumentation genau anders herum.
5.3 Welle-Teilchen-Wechselwirkung
Im vorangegangen Abschnitt wurde schon angedeutet, daß es einen resonanten Zusammenhang von Welle und Teilchen geben muß. In diesem Abschnitt soll auf diesen Zusammenhang näher eingegangen werden.
64
5.3 Welle-Teilchen-Wechselwirkung
Betrachtet man die Teilchen, die sich in Resonanz mit der Welle befinden, im Ruhesystem der Welle, so erkennt man, daß die Teilchen ein stationäres, periodisches elektrisches
Feld fühlen. Dabei findet ein Energieaustausch statt, bei dem schnelle Teilchen Energie
an die Welle geben und langsame Teilchen Energie gewinnen
[Figure 4]
Für den Fall einer eindimensionalen Maxwell-Verteilung (hier sind die langsamen Teilchen immer in der Überzahl!) wird die Energie immer von der Welle an die ResonanzTeilchen übertragen, was immer zu einer Dämpfung der Welle führt.
Wenden wir uns nun der quantitativen Bestimmung des Energieübertrags zu. Gegeben
sei ein elektrisches Feld der Form
~
E(x,
t) = −∇φ
(5.61)
außerdem gilt die Lorentz-Kraft im rein elektrostatischen Fall
m
d~v
∂φ
~
= e ~ex = −eE(x,
t)
dt
∂x
(5.62)
Jetzt soll unser Potential Wellenform annehmen
φ(x, t) = −
E
sin(kx − ωt)
k
Berechnet man nun die Energie eines Teilchens
2
1
dx
− eφ(x, t)
E= m
2
dt
(5.63)
(5.64)
so kann man unter Verwendung der Lorentz-Formel die Energieänderung auf die Potentialänderung zurückführen
dE
dt
d 1
( mv 2 − eφ(x, t))
dt 2
dv
dφ
= mv
−e
dt
dt
∂φ dx ∂φ
dv
− e(
+
)
= mv
dt
∂x dt
∂t
∂φ
= −e
∂t
=
(5.65)
oder wenn wir uns wieder der Schreibweise mit elektrischem Feld bemächtigen
dE
E1
= −e ω cos(kx − ωt)
dt
k
(5.66)
Nehmen wir nun ein Teilchen an, daß bei Eintreffen der Welle eine Position ξ und die
Geschwindigkeit v0 haben mögen und dessen ungestörte Position mit x0 (t) bezeichnet
wird
x(t) = x0 (t) + x1 (t)
(5.67a)
v(t) = v0 + v1 (t)
(5.67b)
65
5 Kinetische Theorie
Seien nun die gestörten Größen deutlich größer als die ungestörten, so kann man in erster
Ordnung für die gestörte Geschwindigkeit annehmen
m
dvt
dt
= −eE! (x, t)
' −eE1 cos(kx0 (t) − ωt)
' −eE1 cos(k(ξ + v0 t) − ωt)
' −eE1 cos(kξ − at)
(5.68)
wobei a = kv0 − ω.
Diese Gleichung läßt sich dann auch einfach integrieren
v1 (t) =
x1 (t) =
eE1
ma
eE1
ma
[sin(kξ) − sin(at + kξ)]
1
(cos(at + kξ) − cos(kξ)) + t sin(kξ)
a
(5.69)
(5.70)
Im Ausdruck für den Ort beschreibt der erste Term in der eckigen Klammer die Teilchenfalle für a = 0, während der zweite Term beschreibt, daß die Teilchen sich von der
Resonanz entfernen.
Nun zurück zur Energieänderung
dE
dt
eE1 ω
cos(k(x0 (t) + x1 (t)) − ωt)
k
eE1 ω
' −
(cos(kξ + at) − kx1 (t) sin(kξ + at))
k
= −
(5.71)
immer unter der Annahme, daß kx1 (t) 1. Auch hier erkennt man den ausgeprägten
Effekt in der Nähe der Resonanzstelle. Allerdings ist die hier beschriebene Methode
mit (äußerster) Vorsicht zu genießen: Der Fallenmechanismus ist stark nichtlinear, die
linearisierte Theorie somit nur von beschränktem Nutzen.
Zuletzt wollen wir noch die mittlere Energieänderung für das gesamte Ensemble berechnen
Z ∞ dE
dE
=
f0 (v0 )dv0
(5.72)
dt ξ,v0
dt ξ
−∞
dE
eE1 ω
=
hkx1 (t) sin(kξ + at)
dt ξ
k
ω sin(at) ωt cos(at)
(eE1 k)2
=
−
+
(5.73)
2m
a2
a
Echte Theoretiker führen jede Seite mindestens eine Variablentransformation, also wir
auch
ω+a
ω
a
v0 =
= + u, u =
(5.74)
k
k
k
66
5.4 Herleitung der MHD-Gleichung aus der Vlasov-Gleichung
Was haben wir dadurch gewonnen? u ist in Resonanz eine kleine Größe mit der Dimension
einer Geschwindigkeit. Also schreiben wir die Energieänderung jetzt mit der Größe u
Z +∞ ωt cos(ktu) ω sin(ktu) dE
(eE1 k)2
ω
=
f0
du
(5.75)
P
+u
−
dt
2m
k
ku
k 2 u2
−∞
Und schon können wir den Trick, daß u eine kleine Größe ist ausnutzen: Wir entwickeln
die Verteilungsfunktion nach u
ω
ω ω f0
+ u = f0
+ uf00
+ ...
(5.76)
k
k
k
Für große kt hat das Integral seinen Hauptanteil bei u = 0 außerdem lassen wir den alle
ungeraden Anteile fallen
Z
dE
(ekE1 )2 ∞ ω 0 ω sin(ktu)
=
du
− f0
dt
2mk
k
k
u
−∞
πe2 k 2 E12 ω 0 ω =
− f0
(5.77)
2mk
k
k
5.4 Herleitung der MHD-Gleichung aus der Vlasov-Gleichung
5.4.1 Momentenbildung
Durch Momentenbildung der Vlasov-Gleichung sollen die makroskopischen Gleichungen
des Plasmas entwickelt werden. Um auch nicht-ideale Prozesse zu berücksichtigen werden
Interspezies-Binärstöße eingebaut.
!
~
∂fα
qα ~ ~v × B
∂fα
∂fα
+ ~v ·
+
E+
= Cα
(5.78)
·
∂t
∂~x
mα
c
∂~v
Der Operator Cα beinhaltet alle Stöße, in die Teilchen der Sorte α involviert sind. Er
leitet sich aus den Stößen zwischen Teilchen der Sorte α und beliebigen Sorten β durch
X
Cα =
Cαβ (fα , fβ )
(5.79)
β
her. Hier soll der Stoßoperator nur elastische Stöße beschreiben, da inelastische Stöße
erheblich komplizierter sind und auch die Umwandlung von Teilchen beinhalten, allerdings wurde schon bei der Betrachtung der Linienkühlung (Abschnitt ??) hervorgehoben,
daß Prozesse wie die Stoßionisation eine untergeordnete Rolle im interstellaren Medium
spielen. Der Stoßoperator wird meist in der Form von ? angegeben.
X 2π(qα qβ )2 log Λ ∂ Z fβ ∂fα
fα ∂fβ
I ~gα,β ~gα,β
Cα =
·
−
·
−
d3~vβ
mα
∂vα
mα ∂vα mβ ∂vβ
g
g3
β
(5.80)
67
5 Kinetische Theorie
Dabei bezeichnet gα,β die Geschwindigkeitsdifferenz (vα −vβ ) und log Λ ist der CoulombLogarithmus, der sich aus dem Stoßparameter b für Coulomb-Streuung und der DebyeLänge λD ergibt (näheres u.a. in ?). I ist die Identitätsmatrix.
Für den Stoßoperator, der die elastische Streuung beschreibt, müssen bestimmte Eigenschaften gelten:
• Er muß die Teilchenzahl erhalten.
Z
Cαβ d~v = 0
(5.81)
• Er muß den Impuls für Stöße einer Teilchensorte erhalten.
Z
mα~v Cαα d~v = 0
(5.82)
• Er muß die Energie innerhalb einer Teilchensorte erhalten.
Z
1
mα~vα2 Cαα d~v = 0
2
(5.83)
Aus den letzten beiden Eigenschaften folgt direkt, wie sich Energie und Impuls für Stöße
zwischen verschiedenen Teilchensorten verhalten:
Z
Z
mα~v Cαβ d~v + mβ ~v Cβα d~v = 0
(5.84)
Z
Z
1
1
mα~v 2 Cαβ d~v +
mβ ~v 2 Cβα d~v = 0
(5.85)
2
2
Für die Gleichgewichtsverteilung nimmt man eine Maxwellverteilung an.
fα0 =
~ )2
nα
− 2km T (~v −V
B
e
(2πT /m)3/2
(5.86)
Wobei sich mit Hilfe des H-Theorems von Boltzmann (dessen Beweis sich u.a. in ? findet)
zeigen läßt, daß jedes Plasma, das durch Kollisionen dominiert wird, eine Maxwellverteilung annimmt. Mit einer gegebenen Verteilung lassen sich jetzt die makroskopischen
~ und T bestimmen.
Größen n, V
Z
nα (t, ~r) = hnα i =
fα (t, ~r, ~v )d~v
Z
1
~
~v fα (t, ~r, ~v )d~v
Vα (t, ~r) = h~vα i =
nα
Z
1
mα
mα
2
~
~α )2 fα (t, ~r, ~v )d~v
Tα (t, ~r) =
h(~vα − Vα ) i =
(~vα − V
3
nα
3
68
(5.87)
(5.88)
(5.89)
5.4 Herleitung der MHD-Gleichung aus der Vlasov-Gleichung
Nun werden analog zur Herleitung der idealen MHD-Gleichungen die Momente der
Vlasov-Gleichung (5.78) gebildet, dieses Mal allerdings unter Berücksichtigung des Stoßtermes Cα .
∂n ∂nVi
= 0
+
∂t
∂xi
Z
∂
∂
1 ~
~ i
=
mvi Cd~v
(mnVi ) +
(mnhvi vj i) − qn Ei + (V
× B)
∂t
∂xj
c
Z
∂ 1
1
∂
1
2
2
~
~
mnhv i +
mnhv vi i − enE · V =
mv 2 Cd~v
∂t 2
∂xi 2
2
(5.90)
(5.91)
(5.92)
Die Indizes i, j beziehen sich hierbei auf die Koordinaten.
Für die weitere Analyse wird jetzt die Geschwindigkeit ~v in eine mittlere Komponente
~ und eine fluktuierende Komponente ~v 0 aufgeteilt.
V
~
~v 0 = ~v − V
(5.93)
Daraus folgt, daß h~v 0 i = 0 gilt. Außerdem soll im Weiteren die substantielle Ableitung
verwendet werden
∂
d
~ · ∇)
=
+ (V
(5.94)
dt
∂t
Mit diesen Annahmen lassen sich die Kontinuitätsgleichung (5.90) und Gl. 5.91 zur
Impulstransportgleichung zusammenfassen
∂πij
∂p
1
dVi
~
=−
−
+ en Ei + (~v × B)i + Ri
mn
(5.95)
dt
∂xi
∂xj
c
Dafür werden einige neue Größen definiert: Der Druck
1
p = nmhv 02 i = nT
3
(5.96)
1
πij = nmhvi0 vj0 − v 02 δij i
3
(5.97)
sowie der Spannungstensor
wobei Spannungstensor und Druck zusammen den Drucktensor Pij = πij + pδij ergeben.
~ die den Transfer von Impuls durch Stöße
Die letzte Größe, die definiert wird, ist R,
beschreibt.
Z
~
(5.98)
R = m~v 0 Cd~v
Indem man Gl. (5.92) auf demselben Wege transformiert, erhält man die Energietransportgleichung.
∂ 1
3
∂
1
5
2
2
~ ·V
~ + R·
~ V
~ +Q
nmV + nT +
nmV + nT Vj + (πij Vi ) + qj = enE
∂t 2
2
∂xj
2
2
(5.99)
69
5 Kinetische Theorie
Die Größen ~q und Q beschreiben dabei den Wärmetransport durch das Plasma und die
durch Kollisionen erzeugte Wärmemenge.
Z
1
1
~q =
mv 02 V f d~v = nmh v 02~v i
(5.100)
2
2
Z
1
Q =
mv 02 Cd~v
(5.101)
2
~ und Q lassen sich zueinander in Verbindung setzen, wenn man berücksichtigt,
Die Größen R
daß der Stoßoperator Energie und Impuls erhält. Daraus folgt, daß bei Stößen zwischen
zwei Spezies für den Impulstransport gilt.
~ αβ = −R
~ αβ
R
(5.102)
Damit gilt für die netto erzeugte Wärmemenge:
~ αβ V
~α − R
~ βα V
~β = −R
~ αβ (V
~α − V
~β )
Qαβ + Qβα = −R
(5.103)
Die linksstehende Summe steht für den Austausch von Wärme von Spezies α nach β und
den umgekehrten Austausch. In einem nicht-dissipativen System sollte diese Summe 0
sein.
Mit der Kenntnis der Energie- und Impulstransportgleichung lassen sich jetzt für den
hier betrachteten Fall eines einfachen zweikomponentigen Plasmas die Transportparameter bestimmen.
Bei der Berechnung der Dämpfungsraten werden verschiedene Parameter benötigt,
von denen die wichtigsten die Stoßzeiten für Elektronen und Ionen sind (?):
τe =
τi =
√
√
3/2
3 me Te
3/2
=
3.5 · 104 Te
log Λ/10 Zn
4 2π log Λe4 Z 2 ni
√
3/2
3/2
3 mi Ti
3.0 · 106 Te
√
=
log Λ/10 Zn
4 π log Λe4 Z 2 ni
Die numerischen Werte gelten für Temperaturen T in Elektronenvolt.
5.5 Stix-Parameter in der kinetischen Beschreibung
70
(5.104)
(5.105)
6 Instabilitäten
71