Mechanik des starren Körpers
Werbung

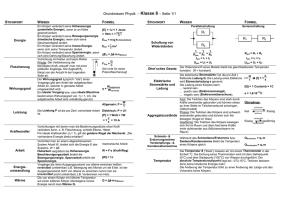
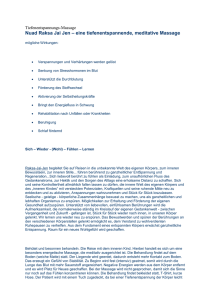
Mechanik des starren Körpers Mechanik des starren Körpers Die Mechanik des starren Körpers sollte von jeder Ingenieurin und jedem Ingenieur im Prinzip verstanden werden. In dieser Vorlesung wird aber nur die Bewegung in der Ebene eingehend besprochen. Das zugehörige Lösungsverfahren ist so grundlegend, dass Sie es wie ein Rezept beherrschen müssen. Lernziele In dieser Vorlesung lernen Sie • • • • • wie die Impulsbilanz und Drehimpulsbilanz bezüglich des starren Körpers formuliert wird wie man einer Kraft ein Drehmoment zuordnet wie man die Gesetze, denen die Bewegung eines Körpers in der Ebene unterworfen ist, formuliert wie man Aufgaben zur ebenen Mechanik systematisch löst (Rezept) wie man die Bewegung des starren Körpers in der Ebene modelliert Struktur Die Mechanik des starren Körpers besitzt eine ziemlich komplexe Struktur. Teilt man diese Struktur in Bilanzgleichungen, Verbindung zur Kinematik und Berechnung von Strecke und Drehwinkel auf, wird sie etwas transparenter. Bilanzgleichungen Ein Körper vermag Impuls und Drehimpuls zu speichern. Beide Grössen dürfen bezüglich eines raumfesten Bezugssystem in sechs skalare Mengen aufgespalten werden, die einzeln zu bilanzieren sind. Folglich müssen die Bilanzgleichungen eines starren Körpers mit sechs Töpfen im Systemdiagramm dargestellt werden. Die zugehörigen Stromstärken bezüglich eines ausgewählten Systems heissen Kräfte bzw. Drehmomente. Man Unterscheidet zwischen Oberflächenkräften und der Gewichtskraft. Bei den Oberflächenkräften fliesst der Impuls leitungsartig, also durch das Material hindurch, über die Systemgrenze. Im Falle der Gewichtskraft tauscht der Körper über sein ganzes Volumen verteilt Impuls mit dem Gravitationsfeld aus. Die Impulsbilanz beschreibt nun den Zusammenhang zwischen den Stromstärken (Kräften) und der Änderungsrate des Inhalts Hier sind nur die Stärken der Impulsströme als Kräfte bezeichnet worden. Die gravitative Impulsquelle wird als (schwere) Masse mal Gravitationsfeldstärke geschrieben. 1 Mechanik des starren Körpers Bei der Drehimpulsbilanz unterscheidet man zwischen reinen Drehmomenten und Drehmomenten, die eine Kraft begleiten. Reine Drehmomente werden von verdrehten Wellen oder vom elektromagnetischen Feld erzeugt. Zusätzliche Drehmomente treten als Begleiterscheinung von Kräften auf. Ein der Kraft zugeordnetes Drehmoment ist gleich Kraft mal Abstand der Wirklinie der Kraft vom Massenmittelpunkt. Die Drehimpulsbilanz nimmt damit die folgende Gestalt an Der Distanzvektor im Kreuzprodukt zeigt vom Massenmittelpunkt zum Drehmoment einer Kraft "Angriffspunkt" der Kraft. Die Zuordnung des Drehmoments zur Kraft hängt mit der Kopplung zwischen den Impuls- und Drehimpulstransporten zusammen. Fliesst ein Impulsstrom quer zu seiner Bezugsrichtung, bilden sich Quellen und Senken von Drehimpuls (siehe letzte Vorlesung). Nun fliessen im Körper alle Impulsströme im Mittel bis zum Massenmittelpunkt. Folglich erzeugt jede Kraft auf einen Körper eine Hebelwirkung bezüglich dieses Trägheitszentrums. Man beachte, dass jede Kraft ungeschmälert in die Impulsbilanz eingeht. Eine Kraft führt also nicht zu einer kleineren Wirkung (Beschleunigung), nur weil ihre Wirklinie am Massenmittelpunkt vorbei führt. Die Wirkung der Kraft darf also unter keinen Umständen mit dem zugeordneten Drehmoment "verrechnet" werden. Bewegung Der Impulsinhalt legt die Geschwindigkeit des Massenmittelpunktes fest Setzt man diese Beziehung in die Impulsbilanz ein, erhält man das Grundgesetz der Mechanik Die Winkelgeschwindigkeit lässt sich nun nicht in Analogie dazu als Drehimpuls durch Massenträgheitsmoment schreiben; die Winkelgeschwindigkeit muss nicht einmal in Richtung des Drehimpulsvektors zeigen. Man kann aber zeigen, dass jeder starre Körper mindestens drei zueinander normal stehende Achsen (Hauptachsen) besitzt, bezüglich denen die einfache Formulierung (i = 1, 2, 3) zutrifft. Die drei zu diesen Hauptachsen gehörenden Massenträgheitsmomente sind in der Regel verschieden gross. Sind die drei Trägheitsmomente sowie die jeweilige Lage der Hauptachsen bekannt, kann die Winkelgeschwindigkeit aus dem aktuellen Drehimpulsinhalt berechnet werden. 2 Mechanik des starren Körpers 3 Ort und Orientierung Den momentanen Ort des Körpers oder etwas präziser, die Position seines Massenmittelpunktes, gewinnt man direkt durch Integration der zugehörigen Geschwindigkeit über die Zeit. Die Orientierung des Körpers im Raum erfordert etwas mehr Kenntnisse in Geometrie, müssen doch aus der Winkelgeschwindigkeit die entsprechenden Drehwinkel ermittelt werden. Eine mögliche Parametrisierung dieses Problems geht auf Leonhard Euler zurück. Heute bettet man die Drehbewegung meist in die Mathematik der Quaternionen ein. Die Rotationsbewegung eines starren Körpers zu berechnen ist einiges aufwändiger als der Umgang mit der Translation. Zusammenfassend halten wir fest Eulerwinkel • Die Lage des Massenmittelpunktes ergibt sich aus der Impulsbilanz, einer Division mit der Masse und einer Integration über die Zeit. • Die Orientierung des Körpers berechnet sich in zwei Schritten • das Massenträgheitsmoment des Körpers (ein Tensor) vermittelt einen linearen Zusammenhang zwischen Drehimpuls und Winkelgeschwindigkeit • aus der Winkelgeschwindigkeit-Zeit-Funktion ist dann die Orientierung des Körpers zu berechnen. ebene Bewegung Die ebene Bewegung des starren Körpers ist um einiges einfacher zu beschreiben als die räumliche. In der Ebene müssen nur zwei Komponenten des Impulses und eine Komponente des Drehimpulses bilanziert werden. Damit entfällt die ganze Problematik mit den Hauptachsen und der komplexen Berechnung der Winkel. Drehimpuls, Winkel und Massenträgheitsmoment verhalten sich wie skalare Grössen. Die Bewegung des Körpers kann mit Hilfe von drei skalaren Grundgesetzen beschrieben werden Hier wird angenommen, dass die y-Achse in Richtung des Gravitationsfeldes zeigt. Mit ax und ay ist die Beschleunigung des Massenmittelpunktes gemeint. Die Kräfte und Drehmomente können als Funktion der Zeit gegeben (aufgeprägt) sein oder von der Bewegung und Lage des Körpers abhängen. xj und yj messen die Distanz zwischen Massenmittelpunkt und "Kraftangriffspunkt". Rezept Zur Analyse der ebenen Bewegung geht man nach folgendem Rezept vor 1. Körper freischneiden, d.h. Systemgrenze festlegen, alle Kräfte und reine Drehmomente identifizieren, Gewichtskraft zusätzlich einzeichnen 2. Koordinatensystem optimal wählen, alle Kräfte in x- und y-Richtung zerlegen, den Kräfte je ein Drehmoment zuordnen 3. alle drei Grundgesetze formulieren 4. Gleichungssystem durch zusätzliche Bedingungen vervollständigen. Dazu gehören 1. zusätzliche Kraftgesetze wie Federgesetz oder Reibungsgesetze Mechanik des starren Körpers 4 2. kinematische Verknüpfungen wie Rollbedingung oder Wirkung von Lagern Besteht das System aus mehreren Körpern, muss diese Analyse für jedes Teilsystem durchgeführt werden. Entsprechend kompliziert können dabei die kinematischen Bedingungen ausfallen. Beispiele Fadenspule Auf die nebenstehend skizzierte, ruhende Fadenspule (Masse 4 kg, Massenträgheitsmoment 0.1 kgm2, Abrollradius 30 cm, Wickelradius 20 cm) wirkt über den horizontal gespannten Faden eine Kraft ein. Die maximal mögliche Haftreibungskraft zwischen Spule und Unterlage beträgt 10 N. 1. Wie stark kann am Faden gezogen werden, damit die Spule gerade noch rollt und nicht rutscht? 2. Welche Beschleunigung erfährt dann ein Punkt auf der Symmetrieachse der Fadenspule (Beschleunigung des Massenmittelpunktes)? Zur Lösung dieses Problems gehen wir nach Rezept vor Fadenspule 1. Im Schnittbild werden alle Kräfte, welche auf die Spule einwirken, eingezeichnet 1. Schnurkraft (gesucht) 2. Haftreibungskraft (gegeben) 3. Gewichtskraft (gegeben) 4. Normalkraft (gesucht) 2. Wählt man die Achsen des Koordinatensystems horizontal und vertikal, zeigen alle Kräfte entweder in x- oder in y-Richtung. Eine Zerlegung in Komponenten ist deshalb nicht notwendig. Die Haftreibungskraft erzeugt eine positives und die Seilkraft ein negatives Drehmoment. 3. Nur zwei der drei Bilanzgleichungen werden zur Lösung des Problems gebraucht. Trotzdem sind nachfolgend alle Gleichungen aufgeführt. 4. Als vierte Gleichung kommt die Rollbedingung (kinematische Verknüpfung) dazu. Gemäss dieser Bedingung ist die Geschwindigkeit des MMP gleich Abrollradius mal Winkelgeschwindigkeit. Diese Forderung überträgt sich auf Beschleunigung und Winkelbeschleunigung. Mechanik des starren Körpers 5 x: y: z: kV: Setzt man die kinematische Verknüpfung (kV) in die Drehimpulsbilanz (z) ein, erhält man ein System mit zwei Gleichungen und zwei Unbekannten. Die Auflösung dieses Gleichungssystems liefert = 13.5 N = 0.88 m/s2 SChnittbild Yo-Yo Ein Yo-Yo, im Deutschen auch Jo-Jo genannt, ist eine Fadenspule, die über den Faden auf und ab rollt. Der Faden sei vertikal ausgerichtet und die Fadenkraft sei gleich gross wie die auf das Yo-Yo (Masse 200 g, Massenträgheitsmoment 8 10-5 kgm2, Wickelradius 1 cm) einwirkende Gewichtskraft. Wie gross sind dann die Beschleunigung des vertikalen Fadenstücks und die Winkelbeschleunigung des Yo-Yo? Im Schnittbild sind nur die beiden entgegen gesetzt gleich grossen Kräfte zu zeichnen. Weil die Summe über alle Kräfte gleich Null ist, ändert das Yo-Yo seinen Impulsinhalt nicht. Folglich wird die Achse des Yo-Yo nicht beschleunigt. Die Fadenkraft erzeugt ein Drehmoment auf das Yo-Yo und vergrössert so seine Winkelgeschwindigkeit. Die Winkelbeschleunigung beträgt = 2.45 102 s-2 und der als masselos angenommene Faden beschleunigt mit = 2.4 ms-2 Schnittbild nach oben. Der vom Gravitationsfeld zugeführte und direkt an den Faden weg fliessende Vertikalimpuls strömt im Yo-Yo um den Wickelradius seitwärts und induziert dort eine Drehimpulsquelle, welche den Körper in Rotation versetzt. Die Geschwindigkeit des Fadens und der Yo-Yo-Achse hängen von der Vorgeschichte ab und können im Moment beliebig gross sein. Über die kinematische Verknüpfung legen sie gemeinsam die momentane Winkelgeschwindigkeit fest. Zudem bestimmen sie zusammen mit den Kräften, wie stark die Energieströme im Faden und zwischen Gravitationsfeld und Körper sind. Die kinematische Verknüpfung kann auch auf die Beschleunigung übertragen werden, falls das Yo-Yo nicht im Gleichgewicht ist und dessen Achse ebenfalls beschleunigt wird. Mechanik des starren Körpers Hula-Hoop Ein Reifen aus Holz oder Kunststoff soll so fort geworfen werden, dass er danach wieder an den Ausgangspunkt zurück rollt. Dazu versetzt man den Reifen bei fast horizontalem Abwurf in eine gegenläufige Rotation. Auf den Reifen wirken das Gravitationsfeld mit der Gewichtskraft und der Boden mit Normal- und Reibkraft ein. Während des Aufschlags ist die Normalkraft grösser als die Gewichtskraft. Kurzer Zeit danach herrscht in vertikaler Richtung Gleichgewicht. Die Gleitreibungskraft wirkt solange, wie der Reifen noch nicht rollt. Am Schluss bewege sich der Reifen mit positiver Drehzahl in positive Richtung. Weil die Grösse der Gleitreibungskraft unbekannt und die Rutschphase recht kurz ist, arbeiten wir mit der über die Zeit integrierten Form der Impuls- und Drehimpulsbilanz. Nun können zwei Bedingungen formuliert werden 1. im Endzustand (Rollen) gilt die Rollbedingung: 2. der Austausch von Drehimpuls und Impuls sind miteinander verknüpft: Die zweite Bedingung folgt aus dem Hebelgesetz. Die nach vorne gerichtete Gleitreibungskraft ist von einem (negativen) Drehmoment begleitet, weil der Horizontalimpuls im Mittel vom Boden bis zum Reifenzentrum fliessen muss. Der Reifen gibt Drehimpuls an die Erde ab und nimmt dabei von der Erde Impuls auf. Die Lösung kann direkt dem Flüssigkeitsbild entnommen werden Flüssigkeitsbilder Das Massenträgheitsmoment ist gleich Masse mal Quadrat des Reifenradius. Ersetzt man nun beim Rollen die Winkelgeschwindigkeit mit Hilfe der Rollbedingung durch die Geschwindigkeit, erhält man für die Endgeschwindigkeit Man beachte, dass die Geschwindigkeit durch die Wahl des Koordinatensystems anfänglich negativ und die Winkelgeschwindigkeit positiv gewesen ist. Die Grösse der Gleitreibungskraft hat keinen Einfluss auf den Endzustand. Sie beeinflusst nur die Länge des Zeitintervalls, in dem der Reifen Impuls und Drehimpuls mit der Erde austauscht. Die durch die Reibkraft dissipierte Energie ist gleich der Differenz der kinetischen und der Rotationsenergie Die Leistung der Reibkraft kann nicht direkt dem Flüssigkeitsbild entnommen werden, weil der Impulsstrom über eine Geschwindigkeitsdifferenz fällt, die gleich ist. systemdynamisches Modell: Magnus-Rolle Ein durch die Luft wirbelnder, glatter Körper erfährt infolge der asymmetrischen Anströmung eine Kraft, die normal zur Geschwindigkeit steht. Diese Kraft, welche die kinetische Energie des Körpers nicht verändern kann, weil ihre Leistung gleich Null ist, heisst nach ihrem Entdecker Magnuskraft. Im Fussball nennt man die Wirkung dieser Kraft Effet. Zieht man nun eine Kartonrolle mittels eines Seidenbandes, das um die Rolle gewickelt worden ist, von der Oberfläche eines Tisches schief nach oben weg, fliegt die rotierende Rolle unter einem bestimmten Winkel nach oben fort. Doch statt längs einer gewöhnlichen Wurfbahn auf den Boden zu fallen, kann die Kartonrolle im Extremfall sogar einen Looping ausführen. Diese Bewegung lässt sich mit einem systemdynamischen Modell gut simulieren. 6 Mechanik des starren Körpers Als Objekt dient eine Kartonrolle (Masse 56 g, Durchmesser 35 mm, Länge 380 mm), die beidseitig mit je einer überkragenden Kartonscheibe verschlossen ist. Diese Scheiben stabilisieren die Rolle im Flug. Das systemdynamische Modell weisst fünf Töpfe (Zustandsgrössen) auf, zwei für die Impulsbilanz, eine für die Drehimpulsbilanz und zwei weitere als reine Integratoren, die aus der Geschwindigkeit die Position ermitteln. Während des Fluges wirken die Gewichtskraft, der Luftwiderstand und die Magnuskraft auf die Rolle ein. Zudem bremst die Luft die Rolle in ihrer Rotation. Mangels genauer Kenntnisse der zugehörigen Dynamik wird das zugehörige Drehmoment als Konstante mal Quadrat der Winkelgeschwindigkeit modelliert. Die Bilder zeigen das Systemdiagramm (flowchart), die Gleichungen, die Flugbahn und den zeitlichen Verlauf der Winkelgeschwindigkeit für drei verschiedene Konstanten. Kontrollfragen 1. Formulieren Sie die Impulsbilanz bezüglich eines Körpers in Ihren eigenen Worten. 2. Formulieren Sie die Drehimpulsbilanz bezüglich eines Körpers in Ihren eigenen Worten. 3. Kräften lassen sich in Oberflächenkräfte (Impulsstromstärken) und Gewichtskraft (Impulsquelle) aufteilen. Kann man bei den Drehmomenten eine analoge Aufteilung vornehmen? Wie unterscheiden sich die beiden Arten? 4. Winkelgeschwindigkeit und Drehimpuls transformieren sich im Raum wie Vektoren (ohne Spiegelung). Kann die Drehung im Raum auch mit Hilfe eines Vektors beschrieben werden? 5. Eine Kugel wird mit einer bestimmten Geschwindigkeit auf die Kegelbahn gesetzt. Schon nach kurzer Zeit rollt sie ohne zu rutschen. Ist die Kugel in der Rutschphase schneller oder langsamer geworden? Oder hat sie ihre Geschwindigkeit beibehalten? Ist die Bewegungsenergie während dieser Zeit konstant geblieben? Wie kann man sich den Zufluss von Drehimpuls erklären? 6. Was versteht man unter dem Magnus-Effekt? Antworten zu den Kontrollfragen 1. Die Impulsbilanz bezüglich eines Körpers besagt, dass die Summe über alle Kräfte (Oberflächen- und Gewichtskraft) gleich der Änderungsrate des Impulsinhaltes ist. Zusammen mit dem kapazitiven Gesetz (Impuls gleich Masse mal Geschwindigkeit des Massenmittelpunkts) folgt daraus das Grundgesetz der Mechanik, wonach die resultierende Kraft gleich dem Produkt aus Masse und Beschleunigung des Massenmittelpunktes ist. 2. Die Drehimpulsbilanz bezüglich eines Körpers besagt, dass die Summe über alle Drehmomente (reine oder eine Kraft begleitende) gleich der Änderungsrate des Drehimpulsinhalts ist. Zusammen mit den kapazitiven Gesetz (Drehimpuls gleich Masse mal Winkelgeschwindigkeit) folgt daraus das Grundgesetz der Drehmechanik, wonach das resultierende Drehmoment gleich dem Produkt aus Massenträgheitsmoment und Winkelbeschleunigung ist. 3. Drehmoment lassen sich in reine und in eine Kraft begleitende Drehmomente einteilen. Reine Drehmomente dürfen ersatzweise durch ein Kräftepaar dargestellt werden. Das eine Kraft begleitende Drehmoment ist gleich Betrag der Kraft mal Abstand der Wirklinie vom Massenmittelpunkt. Hinter beiden Darstellungen steht das physikalische Wirkprinzip, wonach ein quer fliessender Impulsstrom Quellen von Drehimpuls erzeugt. 7 Mechanik des starren Körpers 4. Die Drehung im Raum lässt sich nicht mit Hilfe von Vektoren darstellen. Dass Winkelgeschwindigkeit, Drehimpuls und Drehmoment die Eigenschaft von Vektoren besitzen, folgt aus einer tief schürfenden, mathematischen Analyse. Zudem verhalten sich Winkelgeschwindigkeit, Drehimpuls und Drehmoment bei einer Spiegelung nicht wie gewöhnliche Vektoren. 5. Die anfänglich nicht rollende Kugel wird durch die Gleitreibung gebremst und in Rotation versetzt. Das die Gleitreibungskraft begleitende Drehmoment ändert den Drehimpuls der Kugel. Weil in der Gleitschicht Energie dissipiert wird, bleibt die Bewegungsenergie nicht erhalten. 6. Durch die Luft fliegende Körper erleiden eine Magnuskraft, sobald sie rotieren. Die Magnuskraft steht normal zur Anströmung und zur Winkelgeschwindigkeit des Körpers. Weil die Leistung der Magnuskraft gleich Null ist (Kraft und Geschwindigkeit stehen normal zueinander) ändert die Magnuskraft die kinetische Energie und somit auch die Schnelligkeit des Körpers nicht. Materialien • Videoaufzeichnung [1] • Kurzfassung auf Youtube [2] Physik und Systemwissenschaft in Aviatik 2014 Physik und Systemwissenschaft in Aviatik Quellennachweise [1] https:/ / cast. switch. ch/ vod/ clips/ 2nzqiv1x3y/ link_box [2] http:/ / www. youtube. com/ watch?v=iqsdlbfjhyE 8 Quelle(n) und Bearbeiter des/der Artikel(s) Quelle(n) und Bearbeiter des/der Artikel(s) Mechanik des starren Körpers Quelle: http://systemdesign.ch/index.php?oldid=12043 Bearbeiter: Admin Quelle(n), Lizenz(en) und Autor(en) des Bildes Bild:Drehmoment einer Kraft.png Quelle: http://systemdesign.ch/index.php?title=Datei:Drehmoment_einer_Kraft.png Lizenz: unbekannt Bearbeiter: Admin Bild:Eulerwinkel2.gif Quelle: http://systemdesign.ch/index.php?title=Datei:Eulerwinkel2.gif Lizenz: unbekannt Bearbeiter: Admin Bild:Fadenspule.png Quelle: http://systemdesign.ch/index.php?title=Datei:Fadenspule.png Lizenz: unbekannt Bearbeiter: Admin Bild:Fadenspule_Kraefte.png Quelle: http://systemdesign.ch/index.php?title=Datei:Fadenspule_Kraefte.png Lizenz: unbekannt Bearbeiter: Admin Bild:YoYo..png Quelle: http://systemdesign.ch/index.php?title=Datei:YoYo..png Lizenz: unbekannt Bearbeiter: Admin Bild:Hula Hoop FB.png Quelle: http://systemdesign.ch/index.php?title=Datei:Hula_Hoop_FB.png Lizenz: unbekannt Bearbeiter: Admin Bild:Magnusrolle_E.png Quelle: http://systemdesign.ch/index.php?title=Datei:Magnusrolle_E.png Lizenz: unbekannt Bearbeiter: Admin Bild:Magnusrolle_Bahn.png Quelle: http://systemdesign.ch/index.php?title=Datei:Magnusrolle_Bahn.png Lizenz: unbekannt Bearbeiter: Admin Bild:Magnusrolle_omega.png Quelle: http://systemdesign.ch/index.php?title=Datei:Magnusrolle_omega.png Lizenz: unbekannt Bearbeiter: Admin 9