Trägheitsmoment, Rotationsenergie
Werbung

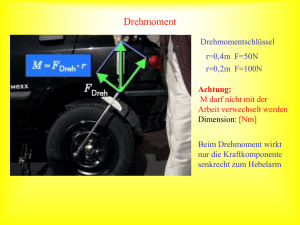
Physik – Klasse 10 Seite:1 Trägheitsmoment Trägheitsmoment und Rotationsenergie Bisher wurden alle Bewegungen bei gleicher Winkelgeschwindigkeit ausgeführt. Betrachten wir einen Körper, der ständig seine Winkelgeschwindigkeit ändert. Dann ist: = t Die Winkelbeschleunigung ß ist die Veränderung der Winkelgeschwindigkeit ω in der Zeit t. Das Drehmoment: Für einen Schwerpunkt mit dem Abstand r können wir einen dazugehörigen Weg s = αr bestimmen, wobei α = ßr ist. Für die tangentielle Beschleunigung benötigen wir die Kraft F. Sie hängt von der Winkelbeschleunigung ab. Dieses ist v wie gesagt für einen Schwerpunkt. Betrachten wir F = m a, wobei a = t mehrere Massenschwerpunkt mit verschiedenen Bahnen, so sollen sie gleiche Winkelbeschleunigungen ß besitzen mit v = r dann ist (z.B. ein starrer Körper). v r F = m = m = mr t t Dynamisches Grundgesetz der Rotation (vgl. Newtonsche Gesetze) An einem drehbaren Körper erzeugt ein Drehmoment eine Winkelbeschleunigung. Das Verhältnis des wirkenden Drehmomentes zur erzielten Winkelbeschleunigung nennt man das Massenträgheitsmoment des Körpers. Massenträgheitsmoment = Drehmoment Winkelbeschleunigung Das Drehmoment M ist: F r = m a r = m r r = m r2 F r = m r2 Für jeden Massenschwerpunkt haben wir bei gleicher Winkelbeschleunigung verschiedene Abstände r. Die Summe alle Drehmomente sei M (M1 + M2 + ....), dann gilt: M = M 1 + M 2 + ....+ M n M = m1 r 12 + m2 r 22 + ...+ mn r 2n M = mi r i2 , mit i = 1, 2, .... , n Die Winkelbeschleunigung ß ist uns bekannt, damit können wir das Massenträgheitsmoment formulieren, wie es oben aufgeschrieben wurde. Dazu wird in jedem Summanden des Drehmomentes die Winkelbeschleunigung ausgeklammert und kann damit aus dem Ausdruck gekürzt werden: 75901872.doc angefertigt:1996 I. 07 , Norbert Burmeister konvertiert: 2004.XII.27 Physik – Klasse 10 Seite:2 Trägheitsmoment = m1 r 12 + m2 r 22 + ...+ mn r 2n Unter dem Massenträgheitsmoment Θ eines Körpers = mi r i2 , mit i = 1, 2, .... , n versteht man die Summe der Produkte aus den Massenelementen und den Quadraten ihrer Abstände von der Drehachse. Maßeinheit [kg m2] Die Rotationsenergie Die kinetische Energie eines Körpers ist allgemein: m E = v2 Da es sich um eine Rotationsbewegung handelt, ist v = ω r . 2 Handelt es sich dabei um mehrere (z.B. n) Massenschwerpunkte schreiben wir: m1 2 m2 2 mn 2 v1 + v 2 + ... + v n 2 2 2 2 2 2 2 2 2 m1 r 1 m2 r 2 m + + ... + n r n E rot = 2 2 2 E rot = E rot = 2 ( 2 2 2 2 m1 r 1 + m2 r 2 + ... + mn r n ) Der Ausdruck in der Klammer ist aber genau das Massenträgheitsmoment Θ. Damit ist die Rotationsenergie E rot = 2 2 Die Massenträgheitsmomente einiger ausgewählter Körper: Körper Lage der Drehachse Massenträgheitsmoment Kreisring, dünn (Reifen) Senkrecht zur Ringebene m r2 Vollzylinder Längsachse m 2 r 2 Hohlzylinder, dickwandig Längsachse m 2 2 ( r1 + r 2 ) 2 Kreisscheibe senkrecht zur Scheibenebene m 2 r 2 Kreisscheibe Durchmesser m 2 r 4 Kugel durch Mittelpunkt 2m 2 r 5 Hohlkugel, dünnwandig durch Mittelpunkt 2m 2 r 3 75901872.doc angefertigt:1996 I. 07 , Norbert Burmeister konvertiert: 2004.XII.27 Physik – Klasse 10 Seite:3 Trägheitsmoment Körper Lage der Drehachse Massenträgheitsmoment Stab, dünn mit Länge l senkrecht zur Stabmitte m 2 l 12 Stab, dünn mit Länge l senkrecht zum Stabende m 2 l 3 Der Drehimpuls (Drall) Unter dem Drehimpuls D (Drall) eines rotierenden Körpers versteht man das Produkt aus seinem Massenträgheitsmoment und seiner Winkelgeschwindigkeit. Wenn D Drehimpuls des rotierenden Körpers, Θ, J Massenträgheitsmoment des Körpers, ω Winkelgeschwindigkeit des rotierenden Körpers, dann gilt D = , gemessen in kg m2 s Die Größe des Drehimpulses, den ein Körper erhält, hängt von Dauer und Größe des beschleunigten Drehmomentes ab. ΔD Änderung des Drehimpulses, M beschleunigtes Drehmoment, t Dauer der Beschleunigung, Θ, J Massenträgheitsmoment des Körpers (auf die Drehachse), Δω Änderung der Winkelgeschwindigkeit des Körpers, dann gilt entsprechend aus dem Grundgesetz der Rotation Wenn M = = t , aus = M Wir erhalten: D = Mt = Das Produkt Mt heißt Antriebsmoment. Es ist gleich der erzielten Drehimpulsänderung. Für den Fall, dass kein Drehmoment vorhanden ist. (z.B. zwei Körper rotieren um ihren gemeinsamen Schwerpunkt. Da ihre Kräfte zum Mittelpunkt gerichtet sind und gleich sind (isoliertes, geschlossenes System) verrichten sie kein Drehmoment). 0 = Ist die Winkelbeschleunigung gleich null, bedeutet es, dass der Drehimpuls konstant ist. 75901872.doc angefertigt:1996 I. 07 , Norbert Burmeister konvertiert: 2004.XII.27 Physik – Klasse 10 Seite:4 Trägheitsmoment v D = = konstant,mit = , r 2 und = m r erhalten wir v vr m r 2 = mvr = 2m r 2 Hierbei bezeichnen wir vr/2 als die Flächengeschwindigkeit. Es ist die Fläche, die bei einer Geschwindigkeit v, vom Radius r überstrichen wird. Der Drehimpuls ist ebenfalls eine vektorielle Größe in Richtung der Drehachse des Körpers. Es lässt sich folgendes formulieren: (1) Ein Drehmoment bewirkt an einem starren Körper eine Änderung des Drehimpulses. (2) Wenn auf einen starren Körper kein Drehmoment wirkt, so ist sein Drehimpuls konstant. Analog zur Translation wird ein Erhaltungssatz formuliert: Satz von der Erhaltung des Drehimpulses: In einem abgeschlossenen System ist die Summe der Drehimpulse konstant. D = = konstant ( 1 + 2 + ...+ n ) = 1 1 + 2 2 + ... m m (Es wirken keine äußeren Drehmomente.) 75901872.doc angefertigt:1996 I. 07 , Norbert Burmeister konvertiert: 2004.XII.27