Document
Werbung

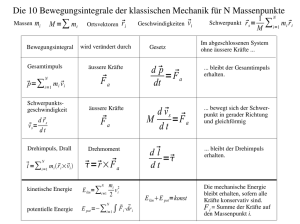
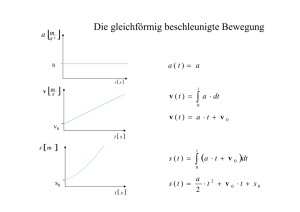
Wichtige Begriffe der Vorlesung: Arbeit, Energie Starrer Körper: Drehmoment, Drehimpuls Impulserhaltung Energieerhaltung Drehimpulserhaltung Symmetrien Mechanische Eigenschaften fester Körper Energiesatz der Mechanik Wenn nur konservative Kräfte wirken, also keine Reibung auftritt, dann gilt: Die Summe aus potentieller und kinetischer Energie eines abgeschlossenen Systems ist unveränderlich. E pot + E kin = E tot = const. ! Beispiel : Die schiefe Ebene Epot + Ekin = const = Etot Anfang m 2 v max = mgh 2 E tot = E pot = m " g " h ! h α ! v max = 2gh Ende E tot = E kin m 2 = v max 2 Lösung des Pendelproblems mit Hilfe des Energiesatzes Das Pendel E tot = E kin + E pot = const. Es gibt 2 ausgezeichnete Punkte: 1.) Maximalausschlag ! " = " max E tot = E pot (" max ) = mgh 2.) Tiefpunkt ! ! " =0 E tot = E kin 2 mv max = 2 ! 1.) +2.) ! v max = 2gh Der allgemeine Energieerhaltungssatz - In einem abgeschlossenen System ist die Gesamtenergie konstant. - Energie kann man weder vernichten noch erzeugen. - Die Energieformen können nur ineinander umgewandelt werden. - Dies schließt alle Formen von Energie ein. (Elektrische, mechanische, chemische Energie, Wärmeenergie, etc.) Perpetuum mobile Die von nicht-konservativen Kräften verrichtete Arbeit, WNK entspricht der Änderung der mechanischen Gesamtenergie !E ges = !E pot + !Ekin = Wdissipativ Die Leistung Die Leistung P ist definiert als die verrichtete Arbeit pro Zeiteinheit. dW P= dt Einheit: 1 W(att)=1 J/s=1 kg m2/s3 - Ein Mensch kann ca. 100 W Dauerleistung leisten (Glühbirne). - 1 PS entspricht 735,5 W Drehbewegungen und der starre Körper Versuch Punktmassen-Systeme „Abgeschlossenes System“ : * keine äußeren Kräfte * nur WW-Kräfte * Inertialsystem In einem abgeschlossenen System gilt : Der Gesamtimpuls ist erhalten. Die Gesamtenergie ist erhalten. (einschließlich der Wärme in nicht konservativen Systemen) Der Gesamtdrehimpuls ist erhalten. Der starre Körper - bisher: Bewegung von Massepunkten. Reine Translationsbewegungen. - jetzt: ausgedehnte Körper. Translations- und Rotationsbewegungen. B A B A Wirkungslinie Kräfte wirken entlang der Verbindungslinie: Gleichgewicht Kräfte wirken nicht entlang der Verbindungslinie: Rotation Neu : Es wirkt ein „Drehmoment“ Drehmoment l : Länge des Hebels Kraft senkrecht auf Hebel M =l!F (N ! m) D F Drehmoment= Hebelarm * Kraft l F α F ! sin(" ) α Kraft wirkt unter beliebigem Winkel D M = l " Fsenkr . = l " F " sin(! ) Mechanisches Gleichgewicht l1 F1 F1 !l1 = F2 !l 2 l2 D F2 (Hebelgesetz) „Kraft mal Kraftarm= Last mal Lastarm“ Ein Körper ist dann im Gleichgewicht, wenn die Summe aller äußerer Kräfte und die Summe aller Drehmomente Null ist. Anwendungen des Hebelgesetzes: Brechstange, Schere, Schubkarre, Getriebe, Gliedmaßen, Baukran ... ! Das Drehmoment als Vektorprodukt v v v M =r"F Eigenschaften : v v M !r v v M !F v v v M = r " F " sin(! ) v v v v r ! F = "F ! r Rechte-Hand-Regel Es trägt nur die Projektion auf die Senkrechte bei Das Kreuzprodukt ist antikommutativ! Schwerpunkt Def. mges = ! mi rs i m1 Gesamtmasse m "r ! = !m i m2 rs Schwerpunkt m3 i Der Schwerpunkt eines abgeschlossenen Systems ist unbeschleunigt. Bei Einwirkung einer äußeren Kraft Fext beschleunigt sich der Schwerpunkt gemäß : 2 mges d rS = Fext 2 dt (Schwerpunktsatz) Aussagen über den Schwerpunkt - Kräfte, die am Schwerpunkt angreifen, wirken auf einen ausgedehnten Körper wie Kräfte auf einen Massepunkt. Schwerpunkt=„Gravitationszentrum“ !l m g = l i i SP mges g Die Summe aller Drehmomente = Drehmoment der ges. Masse im Schwerpunkt Ein Körper, der am Schwerpunkt aufgehängt wird, erfährt im Schwerefeld kein Drehmoment. Drei Gleichgewichtsarten Stabiles GGW: Jede Verrückung x erhöht die Lage des Schwerpunktes d 2 E pot dx 2 >0 Kleine Auslenkung x => Rückstellkräfte Frück~ - x Labiles GGW: Jede Verrückung erniedrigt die Lage des Schwerpunktes Indifferentes GGW: Jede Verrückung läßt die Lage des Schwerpunkts unverändert Der Drehimpuls v ! m v v v ! : Winkelgeschwindigkeit v r : Bahnvektor m : Masse v r Definition Bahngeschwindigkeit r r r v ="!r Drehimpuls : r r r L = r " mv Der Drehimpuls hat die Einheit kg·m2/s Der Drehsinn: Winkelgeschwindigkeit als Vektor v ! m v v r r r v =" #r v r v ! v r ! v v „Rechte-Hand-Regel“ „Korkenzieherregel“ Drehimpuls als Vektor v v v v =" #r v r r v L = r " mv = I # $ v ! v r v v v ! v r ! ! v v Was passiert, wennvein Drehmoment wirkt? !L v v v L v v dL v F v = M " #L = M $ #t M dt v r v v ! L parallel M ! Erhaltung des Drehimpulses Wir betrachten die zeitliche Ableitung des Drehimpulses L dL =M dt ! dL d (mv ) = r! = r ! Fa = M dt dt Grundgleichung der rotierenden Bewegung (analog zu dp/dt=Fa) Bei Abwesenheit eines äußeren Drehmoments bleibt der Drehimpuls konstant. r r M = 0 ! L = const (DrehimpulsErhaltungssatz) Der Drehimpuls ist auch bei nicht-kreisförmigen Bewegungen erhalten. Der Drehimpuls bezieht sich immer auf einen (Dreh)-Punkt Motivation : Trägheitsmoment Das Trägheitsmoment ist die „träge Masse“ der Drehbewegung r r r$ 2 L = r # mv = mr " ! = I " ! „Drehimpuls“ = „Drehträgheit“ mal “Drehgeschwindigkeit“ M = I " d! dt „Drehkraft“ = „Drehträgheit“ mal “Drehbeschleunigung“ Definition : Trägheitsmoment I Einzelne Massenpunkte I = " mi ! ri i 2 Achse Trägheitsmoment einer kontinuierlichen Massenverteilung 2 I = " mi $ ri # ! r 2 dm i r Achse dm Rotationsenergie Jedes einzelne Masseelement besitzt die kinetische Energie m 2 m 2 2 v = " r 2 2 ! Gesamtenergie: I 2 = ! 2 ! ERot mi 2 2 1 I 2 2 2 " 2 ri # = 2 " mi ri $ # = 2 # i i Rotationsenergie eines starren Körpers Dynamik starrer Körper Wurfparabel eines starren Körpers • Schwerpunkt beschreibt Wurfparabel M aSchwerpunkt =Fa r r L = I! • Rotation um den Schwerpunkt: Die Bewegung eines ausgedehnten Körpers lässt sich immer zusammensetzen aus der Translation des Schwerpunkts und die Rotation des Körpers um den Schwerpunkt. Der freie starre Körper hat also sechs Freiheitsgrade der Bewegung. Analogien zwischen Translationsund Rotationsbewegungen Ort Translation v r Beschleunigung v v v a Masse m Geschwindigkeit v v v dp F = m!a = Kraft dt v v p = m!v Impuls m 2 Kinetische Energie !v 2 Rotation Winkel Winkelgeschw. Winkelbeschl. ! v ! v ! 2 I = m r ! i iv Trägheitsmoment v v dL Drehmoment M = I ! " = dt v v Drehimpuls L = I !" I Rotationsenergie !" 2 2 Symmetrieachsen und freie Achsen Feste Drehachse Freie Drehachse Die Rotation um freie Achsen erfordert kein Drehmoment. Jeder starre Körper besitzt (mindestens) drei freie Achsen, und diese stehen senkrecht aufeinander. Der kräftefreie Kreisel : Nutation Ein Kreisel ist ein Körper, der sich um eine freie Achse dreht. Rotiert ein Körper um eine seiner freien Achsen, sind Drehachse und Drehimpuls parallel zueinander. Kreisel im Schwerefeld : Präzession von oben: DF Das Rad läuft um die Aufhängung mit Umlauffrequenz L DL v !L v =M !t v v ! L = L " !# v M !" v = L !t Höhere Drehimpulse stabilisieren die Drehachse Präzession des Kreisels