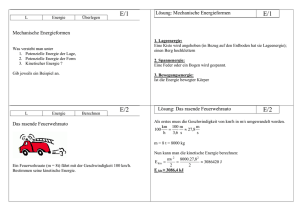
2.6 Energie und Energieerhaltung
Werbung

2.6 Energie und Energieerhaltung
Wir fuhren in diesem Abschnitt zwei neue Begrie ein, Arbeit und Energie. Energie treen
wir in zwei Formen, kinetische und potentielle Energie, an. Beide Begrie werden wir zunachst
denieren und dann zeigen, dass wir uber sie Erkenntnisse durch eine Neuformulierung der
Newton'schen Prinzipien gewinnen konnen. In letzteren war der zentrale Begri die Kraft.
Aus der Kenntnis der Kraft in Funktion der Zeit F~ (t), lasst sich durch zweifache Integration der Bewegungsgleichung die Bewegung vollstandig bestimmen: F~ (t) ! ~r(t). Auch aus der
Impulsanderung, wie dies bei der Rakete der Fall war, lasst sich die Bewegung vollstandig bestimmen, ohne dass man von der Kraft genaue Kenntnis haben musste. Hier war der Impuls die
zentrale Grosse: d~p=dt ! ~r(t). Wenn die Krafte nicht in Funktion der Zeit, sondern in Funktion des Ortes bekannt sind, bietet sich eine neue Methode an, der Arbeit-Energie-Formalismus.
Arbeit ist Energieumwandlung.
Die Betrachtung von Arbeit und Energie hat aber auch noch einen tieferen Hintergrund, der
Konsequenzen ausserhalb der reinen Mechanik hat. Arbeits- und Energiebetrachtungen fuhren
zum allgemeinen Prinzip der Energieerhaltung. Dieses Prinzip ist z. B. die Grundlage der
Warmelehre oder Thermodynamik, wo Warme, elektrische und chemische Energie als alternative
Energieformen erkannt werden, die bei der Energieerhaltung berucksichtigt werden mussen.
Das Konzept der Energieerhaltung ist besonders wichtig fur biologische Systeme, wo in der
Regel Energie zwischen den Teilen eines Systems transferiert wird, z. B.
oder bei der Organfunktion, wo Energie
standig von einer Form in eine andere umim Austausch mit der Umwelt
gewandelt wird, die Summe jedoch konstant
bleibt.
Lebewesen
-
6elektrisch
Umwelt
P E thermisch
chemisch
?mechanisch -
thermisch
mechanisch
Energierhaltung gilt auch in jenen Bereichen der Mechanik, die nicht mehr mit den Newton'schen Methoden behandelt werden konnen, z. B. fur mikroskopische Systeme wie Atome,
Molekule und Kerne, wo wir die Quantenmechanik anwenden mussen, oder fur Systeme mit sehr
hohen Geschwindigkeiten, wo die Einstein'sche spezielle Relativitatstheorie angewendet werden
muss.
Energieerhaltung ist konsistent mit der Newton'schen Mechanik, gilt aber als allgemeineres
Prinzip auch dort, wo diese versagt. Es gibt keine Evidenz irgendwelcher Art dafur, dass
Energieerhaltung in irgendeinem System nicht erfullt ist.
2.72
2.6.1 Arbeit und kinetische Energie
Wirkt auf einen Massenpunkt eine Kraft F~ , die eine Verschiebung um d~r entlang seiner Bahn
bewirkt, so denieren wir als Arbeit, welche die Kraft leistet
dW = F~ d~r = F dr cos Der Ausdruck fur die Arbeit dW enthalt das Skalarprodukt des Vektors F~ mit dem Vektor der Verschiebung d~r (Skalarprodukt, siehe Storrer, op. cit., p.
14). Es enthalt neben den Betragen F , dr noch cos .
ist der Winkel zwischen den beiden Vektoren.
= 2 ) dW = 0
1
Bahn
φ dr
2
r
F
0
< ) dW < 0
0 < < 2 ) dW > 0
2
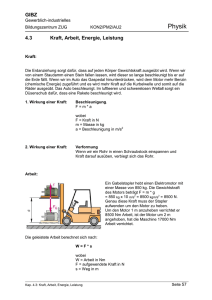
Im linken Bild ist dieser Sachverhalt illustriert. Beim
Heben der Katze leisten wir positive Arbeit, beim
Herumtragen keine, beim Senken negative Arbeit im
Sinne der obigen Denition.
Wir leisten keine Arbeit, wenn
i) der Korper ruht (d~r = 0)
ii) keine Kraft wirkt (F~ = 0), d. h. der Korper sich
mit konstanter Geschwindigkeit bewegt oder ruht.
iii) d~r senkrecht auf F~ steht, wie oben erwahnt.
Beispiele zu letzterem Punkt sind die Lorentz-Kraft,
h
F~ = q ~v B~
i ~
r ~
F ?~v = d~
dt F ?d~r
die Normalkraft N~ bei
ruhender Unterlage,
N~
6
~v -
und die Fadenkraft beim mathematischen Pendel.
Die total geleistete Arbeit erhalten wir durch Integration von dW langs der Bahn
W1!2 =
Z2
1
F~ d~r
Wir nennen dies das Linienintegral der Kraft F~ (auch Kurvenintegral, siehe Storrer, op. cit.
Kap. 14, p. 184). Die Einheit der Arbeit ist Joule [ = J = Nm = Watt s = Ws]. Wenn die Kraft
konstant ist und parallel zur Verschiebung des Massenpunkts, dann gewinnen wir als Spezialfall
das Sekundarschulgesetz
2.73
-d
d~r1 F~
2
-x
Arbeit = Kraft Weg:
W=
Z2
1
F~ d~r = Fx
Z2
1
dx = F d
Die pro Zeiteinheit geleistete Arbeit nennen wir die Leistung
~ d~r = F~ ~v
=
F
P = dW
dt
dt
Die Einheit ist [ Watt = Joule s;1 ] (1 PS = 735.5 W).
Als nachstes denieren wir die kinetische Energie T eines Teilchens der Masse m, das sich
mit der Geschwindigkeit v bewegt:
2
T = m2 v 2 = 2pm
Bezeichnen wir die A nderung der kinetischen Energie eines Massenpunkt mit dT so gilt
dT = dW
Die A nderung der kinetischen Energie eines Massenpunkts ist gleich der geleisteten Arbeit.
Bevor wir diese Beziehung durch Umformen des Newton'schen Aktionsprinzips beweisen,
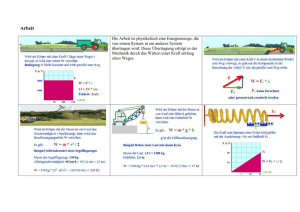
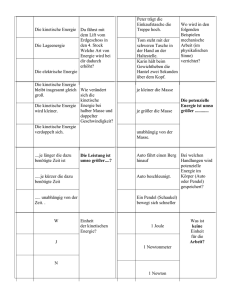
wollen wir sie plausibel machen an drei sportlichen Betatigungen, Kugelstossen, Bogenschiessen
und Heben einer Last (Abbildung 2.42). In allen drei Fallen, wir haben jeweils Kraft und Verschiebung parallel zueinander gewahlt, ist das Resultat der Arbeitsleistung eine Geschwindigkeit
und damit eine kinetische Energie des vorher ruhenden Korpers.
Wahrend beim Kugelstossens die Kraft des Sportlers die Kugel direkt beschleunigt, der
Zusammenhang zwischen Arbeit und kinetischer Energie direkt beobachtbar ist, leistet beim
Bogenschutzen die Federkraft die Arbeit am Pfeil, bzw. beim Heben die Gewichtskraft die Arbeit, wenn die Last beim Fallen kinetische Energie gewinnt. In den beiden letzteren Fallen kann
die Umsetzung der Arbeit in kinetische Energie noch lange nachdem der Sportler den Bogen
spannte bzw. die Last hob erfolgen. Mit seiner ursprunglichen Arbeit erteilte er dem Bogen
die Moglichkeit kinetische Energie zu erzeugen. Diese Moglichkeit, bzw. praziser die entsprechende gespeicherte Energie nennt man Lageenergie oder potentielle Energie. Die kinetische
Energie an Ende ist aber immer noch gleich der ursprunglich geleisteten Arbeit. Arbeit ist
Energieumwandlung, dies sehen wir an diesen Beispielen direkt.
Bewegt sich eine Masse m unter der Wirkung irgendeiner Kraft F~ , so folgt aus dem Aktionsprinzip
m d~v = F~ ) m d~v ~v = F~ ~v = P = dW
dt
dt
dt
Skalares Multiplizieren beider Seiten mit ~v ergibt auf der rechten Seiten die Leistung P der
Kraft F~ . Die gesamte von der Kraft auf einem Weg zwischen zwei Punkten 1 und 2 an der
Masse geleistete Arbeit ist dann
W1!2 =
Z2
Z 2 d~v
Z2
Z2
m dt ~vdt = m ~v d~v = m (vx dvx + vy dvy + vz dvz )
1
1
1
1
2 2 22 m 22 m 2 2
=m
2 vx + vy + vz 1 = 2 v 1 = 2 (v2 ; v1 ) T2 ; T1
dW =
2.74
m
m
F dr
v
Arbeit: dW
kinetische Energie: dT
m
m
m F
dr
m
v
F dr
Arbeit: dW
Lageenergie: dU
Arbeit: dW
kinetische Energie: dT
m
F dr
m
F
Arbeit: dW
Lageenergie: dU
v
m
m
Arbeit: dW
dr
kinetische Energie: dT
Abbildung 2.42: Die Umwandlung von Arbeit in kinetische Energie am Beispiel des Kugelstossens, des Bogenschiessens und des Hebens einer Last.
2.75
Im letzten Schritt bei der Berechnung der Arbeit haben wir die Denition der kinetischen
Energie T beutzt. Zusammengefasst ergibt sich
geleistete Arbeit =
W1!2 Z2
1
Dierenz der kinetischen Energien
F~ d~r = m2 v22 ; m2 v12 T2 ; T1
In dierentieller statt integraler Form geschrieben ergibt sich das oben schon postulierte
Gesetz dW = dT .
Mit Hilfe einer Energiebetrachtung lassen sich oft mechanische Probleme einfacher losen als
mit der vektoriellen Bewegungsgleichung. Da Arbeit und kinetische Energie skalare Grossen sind,
also keine Richtung enthalten, muss dabei die Form der Bahnkurve als bekannt vorausgesetzt
werden. In den folgenden Beispielen ist die Bahn geradlinig.
Beispiel { Gleiten mit und ohne Reibung:
N
(i) Reibungsloses Gleiten auf horizontaler Ebene
v
F~ = G~ + N~ = 0 dW = F~ d~r = dT = 0
G
) T = const: v = const:
(ii) Reibungsloses Gleiten auf schiefer Ebene (R = 0, v0 =
0, Starthohe h):
x
N
z
L
v0
R
α
G
h
F~ = G~ + N~ 6= 0
dW = F~ d~r = G~ d~r = G sin dr = dT
T2 ; T1 = GL sin = mgh
(iii) Lange des Bremswegs auf schiefer Ebene (R = G N ,
~v0 =
6 0)
Z
T ; T = ; m v 2 = (R~ + G~ + N~ ) d~r
2
1
2
0
G
N~ d~r = 0; G~ d~r = mg sin dr; R~ d~r = Rdr = G Ndr = G mg cos Z
; m2 v02 = mg(sin ; G cos )dr = ;mgL(sin ; G cos )
2
L = 2g(; sin v+0 cos )
G
Der Bremsweg nimmt quadratisch mit der Geschwindigkeit zu. Ist G < tan , so ist kein
Bremsen mehr moglich.
Beispiel { Seilzug zum Heben einer Last: Die Hand des Arbeiters und die Last bewegen
sich um die gleiche Distanz (siehe Abbildung 2.43). Die Hand zieht am Seil, das Seil zieht an
der Last, die Last hebt sich um jd~j = d. Die Arbeit ist also W = mgd, Kraft Weg, ist das
wirklich so klar ? Wenn wir das 2. Newton'sche Prinzip zunachst getrennt auf die Last und das
2.76
Seil anwenden und ferner annehmen, dass die Last mit konstanter Geschwindigkeit angehoben
wird, dann erhalten wir:
G~ + F~SL = 0 Last
F~LS + F~HS = 0 Seil
Addieren wir die beiden Gleichungen und betrachten das Gesamtsystem, so ergibt sich
G~ + F~HS = 0
Die Kraft der Hand auf das Seil ist betragsmassig gleich dem Gewicht
der Last. Die Arbeit der Hand wird damit
W=
FLS
FSL
d
1
F~HS d~r = F~HS d~0 = jF~HS jd0 = mgd
denn d0 = d; d~0 k F~HS jF~HS j = G = mg
Fur die Arbeit der Seilkraft an der Last erhalten wir das gleiche
FSH
d'
G
Z2
W = F~SL d~ = jF~SL jd = mgd
FHS
Abbildung 2.43: Seilzug.
Fur die Arbeit des Gewichts an der Last erhalten wir hingegen
W = G~ d~ = ;jG~ jd = ;mgd
0
Beispiel { Endgeschwindigkeit beim freien Fall:
Z z=0
Z
Z0
dW = Gdz = mgdz = ;mgh = 21 m(v02 ; vh2 ) ) vh2 = 2gh
z=h
?G~
?z = h
r
h
Beispiel { Arbeitsleistung einer Feder:
Z x2
Z x2
W=
F (x)dx = (;kx)dx
x1
F
x1
= ; k2 (x22 ; x21 )
Mit x2 x; x1 = 0 ) W = ; k2 x2
Dies ist die Arbeitsleistung der Feder. Die Arbeit, die wir beim
Spannen oder Zusammendrucken leisten, ist das Negative dieser
Grosse.
x1
x2
2.6.2 Arbeit und potentielle Energie (Lageenergie) { der Energiesatz der Mechanik
Bisher haben wir die kinetische Energie als eine mit dem Bewegungszustand des Korpers assoziierte Grosse kennengelernt. Eine von einer Kraft an einem Korper geleistete Arbeit fuhrte zu
2.77
einer A nderung der kinetischen Energie gleicher Grosse. In diesem Abschnitt fuhren wir nun die
in Abbildung 2.42 angedeutete, mit der Lage eines oder mehrerer Korper verbundene potentielle
Energie ein. Am Rande, im Zusammenhang mit der Energieerhaltung werden wir auch noch den
Begri der thermischen Energie, die mit der zufalligen Bewegung von Atomen und Molekulen
in einem Korper verbunden ist, streifen.
Wenn der Bogenschutze seinen Bogen spannt, dann macht er im Prinzip das gleiche wie wir,
wenn wir eine Feder dehnen oder zusammendrucken. Es andern sich die relativen Positionen
der Wicklungen der Feder. Die Wicklungen widersetzen sich dieser Zustandsanderung und das
Resultat der geleisteten Arbeit ist eine Vergrosserung der elastischen potentiellen Energie der
Feder. Elastische potentielle Energie ist die mit dem Kompressionszustand einer Feder (oder
eines anderen elastisch deformierbaren Objekts) assoziierte Energie.
Wenn der Gewichtheber eine Hantel uber seinen Kopf hebt, vergrossert er nicht die kinetische
Energie der Hantel, sondern er vergrossert die Distanz zwischen der Erde unter Hantel, die
miteinander durch die Gravitationskraft wechselwirken. Seine Arbeit erhoht die potentielle
Energie des Systems Erde{Hantel durch Verandern der relativen Positionen von Erde und Hantel.
Allgemeiner versteht man unter potentieller Energie im Gravitationsfeld die mit dem Abstand
zweier Korper, die aufeinander durch die Gravitationskraft eine anziehende Wechselwirkung
ausuben, assoziierte Energie.
Diese beiden Beispiele formulieren wir nun zunachst etwas quantitativer, bevor wir zur allgemeinen Denition ubergehen. In beiden Fallen haben wir es mit einem, durch einen Freiheitsgrad
charakterisierten System zu tun. Unsere Arbeit{Energie Beziehung lautet dann (1: Anfang, 2:
Ende)
Z2
W1!2 = T2 ; T1 = F (x)dx
1
Wir denieren als A nderung der potentiellen Energie U
U2 ; U1 ;W1!2 = ;
Fur die Feder bekommen wir dann mit F (x) = ;kx
U2 ; U1 = ;
Z2
1
Fur die gehobene Last mit F (x) = ;mg gilt
U2 ; U1 = ;
Z2
1
Z2
1
F (x)dx
(;kx)dx = k2 (x22 ; x21 )
(;mg )dx = mg (x2 ; x1 )
Potentielle Energie ist nur als Dierenz deniert. Ein absoluter Wert ist nicht vorgegeben. Man
kann zu U eine beliebige Konstante an allen Punkten addieren oder subtrahieren, und auch uber
den Ort, wo U = 0 gilt, beliebig verfugen. Wahlt man fur die Feder U1 = 0 fur x1 = 0, so erhalt
man fur die potentielle Energie einer Feder (x2 x)
U (x) = 21 kx2
Wahlen wir fur die zu hebende Last die Erdoberache als Referenzpunkt mit x1 = 0; U1 = 0, so
erhalten wir fur die potentielle Energie im Gravitationsfeld in Erdnahe (x2 x)
U (x) = mgx
2.78
Allgemein denieren wir nun als A nderung der potentiellen Energie
U2 ; U1 ;
Z2
1
F~ d~r
und haben damit die Arbeit{Energie Beziehung erweitert zu
T2 ; T 1 =
Dies kann umgeformt werden zu
Z2
1
F~ d~r ;(U2 ; U1 )
T2 + U2 = T1 + U1
Da Punkt 2 und Punkt 1 beliebige Punkte sind im Wirkungsbereich der Krafte sind, erkennt
man in dieser Gleichung, dass die Summe T + U unabhangig vom Ort immer den gleichen Wert
hat, also konstant ist, d. h. man formuliert
T + U = const. Etot = totale Energie
In dierentieller Form erhalten wir
dT + dU = 0
dT = F~ d~r = ;dU
Dies ist der Energiesatz der Mechanik.
Wann gilt dieser Satz ? Wir haben den Energiesatz an den Beispielen der Federkraft und
der Gravitationskraft plausibel gemacht. Fur die dabei auftretenden Krafte gilt er. Federkraft
und Gravitaionskraft sind sogenannte konservative Krafte.
Wann gilt der Satz nicht ? Lassen wir wieder einmal einen Klotz der Masse m, der auf
dem Boden gleitet, durch eine Reibungskraft zur Ruhe bringen. Diese Situation unterscheidet sich von derjenigen, die wir beim Gewicht und der Federkraft angetroen haben. Denn es
gibt keine Moglichkeit, dass der Klotz durch die Umkehr seiner Bewegung die ursprungliche
kinetische Energie wieder zuruckgewinnen kann. Der Grund dafur ist, dass Energie vom Klotz
in thermische Energie des Bodens und der Unterlage verwandelt wird. Beide erwarmen sich.
Die Energieubertragung kann nicht umgekehrt werden, weil die vorhandene kinetische Energie in einer ungeordneten Bewegung der einzelnen Atome der einzelnen Atome von Klotz und
Boden resultiert. Hier ist also die ursprungliche kinetische Energie nicht als potentielle Energie gespeichert. Die Gleitreibung ist wie auch die anderen Reibungskrafte { Luftwiderstand,
Flussigkeitsreibung, dynamischer Auftrieb { keine konservative Kraft.
Wenn wir die Umwandlung in Warmeenergie einschliessen wollen, mussen wir schreiben
dT + dU + dEWarme = 0
Der Energiesatz der Mechanik gilt also nur fur Systeme, in denen nur konservative Krafte
auftreten. Woran erkennt man aber, dass eine Kraft konservativ ist ?
Keine explizite Zeitabhangigkeit: Konservative Krafte sind nicht explizit von der Zeit abhangig.
Dies heisst, das z. B. Krafte wie F (t) = at2 oder wie F (t) = exp(t) nicht konservativ
sein konnen.
2.79
Wegunabhangigkeit der geleisteten Arbeit: Eine Kraft ist konservativ, wennsie bei einer Verschiebung von einem Punkt 1 zu einem Punkt 2 die von der Kraft geleistete Arbeit W1!2
unabhangig vom Weg ist, der fur die Verschiebung gewahlt wird.
B
A
Fur die Gravitationskraft und die Coulomb-Kraft, wie auch allgemein fur zentrale Kraftfelder
gelten die obigen Bedingungen. Daher sind Gravitationskraft wie Coulomb-Kraft konservative
Krafte.
Fuhren wir den Beweis zunachst fur die Gravitationskraft in Erdnahe:
s
2
*6
h
d~
r
*
6d~r
d?~
G~
G
?
d~r
~
?G
1
3
s
W1A!2 =
r
r
r
W1B!2 =
Z3
1
Z2
1
G~ d~r = mg cos( ; )
= ;mgd cos = ;mgh
~ r+
Gd~
Z2
3
~ r = 0 ; mg
Gd~
Z2
Z2
3
1
dr
dr = ;mgh
Wir erhalten das gleiche Resultat, unabhangig davon ob wir direkt entlang der ansteigenden
Geraden von 1 nach 2 gehen, oder ob wir zuerst bis zum Punkt 3 senkrecht unter 2 horizontal
gehen und dann lotrecht nach oben. Auf dem horizontalen Wegstuck andert sich die potentielle
Energie nicht, da die Gewichtskraft keine Arbeit leistet. Nur auf dem vertikalen Anstieg andert
sich die potentielle Energie.
Horizontale Flachen sind Flachen konstanter potentieller Energie. Man nennt solche Flachen
Aquipotentialachen. Ein beliebiger Weg lasst sich immer unterteilen in kleine horizontale Schritte und vertikale Schritte. Fur jeden einzelnen, kleinen Teilabschnitt kann man die obigen Resultate verwenden, und damit ergibt sich auch fur einen beliebigen Weg von 1 nach 2 das gleiche
Resultat. Hatten wir beim horizontalen Weg auf einer Unterlage Reibungskrafte, so gilt dies
nicht, weil beim Anheben entlang der schragen Bahn keine Reibungskrafte auftreten.
Fur die uns bekannten Zentralfelder, das Gravitationsfeld ~g und das elektrische Feld E~ ,
fanden wir die Krafte auf einen Probekorper der Masse m bzw. der Ladung q
F~G = m~g
F~C = qE~
~g; und E~ ;Feld sind zentralsymmetrisch, wenn sie durch eine punktformige, ruhende Masse
M mit Ladung Q erzeugt werden. Fur die Krafte konnen wir schreiben
F~ = C r~r3
mit C = ;;Mm fur die Gravitationskraft und C = 4Qq
0 fur die Coulomb ; Kraft
Wir wollen nun die Arbeit berechnen, die vom Kraftfeld F~ an einer Masse m oder Ladung
2.80
q geleistet wird, wenn sich diese im Feld von einem Ort 1 zu einem Ort 2 bewegt.
Nach Denition ist
W1!2 =
Z2
1
F~ d~r
B
Z2
1
F~ d~r =
Z2
1
F~ d~r +
Z2
3
D
3
1
~ r
Fd~
E
F
Fur unsere spezielle Wahl ist
Z2
3
1
F~ d~r = C
dr
4
2
r2
U(r2)
r1
U(r1)
F~ d~r = 0 d~r?F~
Z3
A
C
Um dieses Integral zu berechnen, mussen wir uns
einen Weg vorgeben, und ihn dann mit anderen
Wegen vergleichen. Wir gehen von 1 in Radialrichtung (langs einer Feldlinie) bis zu einem Punkt
3, von dem aus wir das Ziel 2 auf einem Weg
3 ! 2 erreichen, der die Feldlinien uberall senkrecht schneidet. Allgemein gilt
M
Z 3 rdr
Z 3 dr
Z 3 ~r
d~
r
=C
=C
= ;C ( 1 ; 1 )
3
3
2
r3 r1
1 r
1 r
1 r
Da r3 = r2 gewahlt wurde, erhalten wir insgesamt
Z2
1
F~ d~r = ;C ( r1 ; r1 )
2
1
Gehen wir in umgekehrter Reihenfolge zuerst senkrecht zu F~ von 1 nach 4 und dann in F~ Richtung von 4 nach 2, so erhalten wir genau dasselbe Resultat. Oder allgemein: Da sich jeder
Weg von 1 nach 2 in Radial- und Tangentialschritte zerlegen lasst, und da nur die Radialschritte
einen Beitrag zum Integral leisten, ist fur alle Wege
Z2
F~ d~r = ;C ( 1 ; 1 ) ;(U ; U )
2
1
r2 r1
Die von der Kraft F~ auf dem Weg 1 ! 2 geleistete Arbeit hangt nur von der Wahl von
1
1 und 2 und nicht vom Weg dazwischen ab. Wir haben den erwunschten Beweis der Wegunabhangigkeit damit erbracht. Das Resultat lasst sich auch auf ausgedehnte Verteilungen von
ruhenden Ladungen und Massen anwenden, da deren Felder sich aus einer Superposition von
Zentralfeldern ergeben.
Zusatz: Wir konnen analoge Gleichungen statt fur die Kraft fur die Feldstarke aufstellen, indem wir durch die Probemasse m oder die Probeladung q teilen. Es gilt dann fur das
Gravitationsfeld bzw. elektrische Feld
Z2
Z2
1
~ r = ; 1 (U ; U ) ;(V ; V )
Fd~
~gd~r =
1
m
1
~ r= 1
Ed~
q
Z2
1
Z2
1
m
2
1
2
1
F~ d~r = ; q1 (U2 ; U1 ) ;(V2 ; V1)
2.81
Die Grosse V heisst Potential des Feldes. Das Potential ist gleich der potentiellen Energie
pro Einheitsprobemasse oder -ladung. Aus der Denition geht hervor, dass in Flachen, welche
senkrecht auf den Feldlinien stehen, (~g ? d~r) das Potential uberall gleich gross ist. Fur eine
Punktmasse sind die A quipotentialachen konzentrische Kugelachen.
Wie wir aus einem vorgegebenen Vektorfeld das skalare Potentialfeld durch Integration berechnen konnen, so lasst sich umgekehrt aus einer gegebenen Potentialverteilung die Feldstarke
durch Dierentiation erhalten. Fur den eindimensionalen Fall gilt z. B.
F (x) = ; dU (x)
x
dx
Im allgemeinen, dreidimensionalen Fall gelten diese Beziehungen fur jede einzelne Komponente, nur muss in der Ableitung auch nach der entsprechenden Komponente des Ortsvektors
dierenziert werden, die gewohnlich Ableitung muss dann durch die partielle Ableitung ersetzt
werden. (d ! @ , siehe Storrer, op. cit. Kap. 23, p. 334-336)
0 @V (x; y; z) 1
BB @x CC
B @V (x; y; z) CC
~g(~r) = ~g(x; y; z ) = ; B
BB @y CC
@ @V (x; y; z) A
0 @U (x; y; z) 1
BB @x CC
B @U (x; y; z) CC
F~ (x; y; z) = ; B
BB @y
C
@ @U (x; y; z) CA
oder
@z
@z
Zusammenfassung: Arbeit, kinetische Energie
Arbeit: Wirkt auf einen Massenpunkt eine Kraft F~ , die eine Verschiebung d~r entlang einer
Bahn bewirkt, so deniert man als geleistete Arbeit dW :
~ r ) dW = 0 fur F~ ?d~r
dW = Fd~
Fur einen Weg vom Anfangspunkt 1 zum Endpunkt 2 gilt:
W1!2 =
Leistung:
Kinetische Energie:
Arbeit-Energie Beziehung:
Z2
1
F~ d~r
~ d~r = F~ ~v
P = dW
=
F
dt
dt
T m2 v2
dW = dT oder W1!2 = T2 ; T1
2.82
Zusammenfassung: Potentielle Energie, Energiesatz der Mechanik
Potentielle Energie:
Z2
dU ;F~ d~r
; (U2 ; U1) F~ d~r
1
Das Integral ist in einem zentralen Kraftfeld vom Weg 1 ! 2 unabhangig. Allgemein
nennt man zeitunabhangige Krafte, bei denen letzteres gilt, konservative Krafte.
Es sind nur Dierenzen der potentiellen Energie messbar. Der Nullpunkt kann beliebig
gewahlt werden.
Energiesatz der Mechanik:
dT + dU = 0 bzw: T2 + U2 = T1 + U1 = E
Die totale Energie E ist konstant. Dies gilt, wenn nur konservative Krafte auftreten.
Reibungskrafte sind keine konservativen Krafte.
Potentielle Energie im Gravitationsfeld:
Mit U (r1) 0 und r2 r:
U (r2) ; U (r1) = ;;Mm( r1 ; r1 )
2
1
U (r) = ;;Mm 1r
In der Nahe der Erdoberache gilt fur die potentielle Energie im Schwerefeld in Funktion
der Hohe z mit U (0) 0:
F (z ) = ;mg U (z) = mgz
Potentielle Energie einer Feder:
F (x) = ;kx U (x) = k2 x2 = 12 m!02 x2
Eindimensionale, konservative Kraft:
F (x) = ; dUdx(x)
2.83
2.6.3 Anwendungen des Energiesatzes
Pendel: Die Bewegung eines Fadenpendels der Lange ` ist im Abschnitt 2.5.4.2.4 behandelt
worden. Wird das Pendel aus einer Hohe h losgelassen,
p mit h = `(1 ; cos 0), so ist seine
Bewegung gegeben durch (t) = 0 cos !0 t mit !0 = g=`.
Im hochsten Punkt seiner Bahn steht das Pendel still. Es
hat an diesem Punkt nur potentielle Energie, und zwar
relativ zum untersten Punkt seiner Bahn U0 = mgh =
mg`(1 ; cos 0). Im untersten Punkt seiner Bahn, beim Passieren seiner Ruhelage hat das Pendel nur kinetische Energie: Tp
0 = (m=2)v02. Energieerhaltung erfordert U0 = T0 oder
v0 = 2gh. In jedem Punkt der Bahn ist die Summe von
φ0
l
kinetischer Energie und potentieller Energie konstant, die
Anteile sind jedoch verschieden. Dies konnen wir auch aus
der Kenntnis der Pendelbewegung ableiten:
h
v0
G
U = mg`(1 ; cos (t)) = mg`
(t) = 0 cos !0 t ) j~v(t)j = v(t) = ` d
dt = ;`!0 0 sin !0t
rg
2
m
m
2
T = 2 v(t) = 2 ;` ` 0 sin !0t = 12 mg`20 sin2 !0 t
1 ; cos2 ( 1 ) + sin2 ( 1 )
2
2
) U = 2mg` sin2( 12 )
Fur kleine Ausschlage : sin2 ( 1 ) ( 1 )2 ) U = 1 mg`2 = 1 mg`20 cos2 !0 t
2
2
2
2
) T + U = 21 mg`20 mg`(1 ; cos 0) = mgh
Abbildung 2.44 zeigt die relative Verteilung der totalen Energie an acht Punkten einer Pendelperiode.
Feder: Auch fur eine Feder wird in den verschiedenen Momenten der Bewegung die totale
Energie auf die beiden Anteile der kinetischen und der potentiellen Energie verteilt. Bei der
Feder steckt die potentielle Energie allerdings in der Deformation der Feder, wahrend beim
Pendel der Abstand zum Boden vergrossert wird. Abbildung 2.44 zeigt die relative Verteilung
auf die beiden Anteile wiederum in acht ausgewahlten Punkten der Schwingung. Dass die totale
Energie konstant ist, lasst sich ahnlich wie beim Pendel wieder aus dem bekannten zeitlichen
Verlauf der Bewegung beweisen:
s
x = x0 cos !0t mit !0 = mk ) vx(t) = ;!0 x0 sin !0 t
T = m2 vx2 = m2 !02 x20 sin2 !0t = k2 x20 sin2 !0 t U = k2 x2 = k2 x20 cos2 !0t = m2 !02x20 cos2 !0 t
T + U = m !2 x2 = k x2 E
2
0 0
2.84
2
0
0
v=+vmax
v
v
v
U K
U K
U K
v=0
v=0
U K
U K
v=-vmax
v
U K
v
U K
v
v=+vmax
v
U K
v
v
x=0
0
0
U K
U K
U K
v=0
x=-xmax
v=0
0
0
U K
U K
v
x=+xmax
v
v=-vmax
v
0
U K
0
0
U K
U K
Abbildung 2.44: Verteilung der totalen Energie auf den Anteil der potentiellen Energie U und
der kinetischen Energie T K fur acht ausgewahlte Punkte der periodischen Bewegung eines
Pendels (oben) und einer Feder (unten) (aus Haliday, Resnick, Walker, op. cit. p. 192/193).
2.85
Auf etwas andere Art illustrieren wir diese Zusammenhange in Abbildung 2.45. Sie
zeigt die potentielle Energie einer Feder in
Funktion der Auslenkung. Es ergibt sich
der erwartete parabolische Verlauf fur die
potentielle Energie. Der Zustand fester
totaler Energie E0 ist eingezeichnet. Die
Dierenz zwischen der horizontalen Linie
E0 und U (x) = kx2 entspricht der kinetischen Energie T (x). Fur den Maximalausschlag x = x0 ist E0 = U (x0) und
T (x0) = 0: Die Tatsache, dass bei dieser
festen Energie E0 die Bahn innerhalb der
Grenzen ;x0 x x0 verlauft, macht
diese Bewegung zu einer gebundenen Bewegung und den Bewegungszustand zu einem gebundenen Zustand.
Potentielle Energie eines Feder-Oszillators
4
U(x)=kx2/2
3
E0
-x0
x0
2
1
F=-kx
F
−α
0
-2
-1
α
0
1
x
2
Abbildung 2.45: Potentielle Energie einer Feder.
Dies lasst sich aus der Abbildung ablesen. Auch aus der Abbildung ablesen lasst sich die
Starke und Richung der Kraft. Mit F (x) = ;dU=dx ist die Kraft in einem bestimmten Punkt
gegeben durch den Gradienten (die Ableitung) der Kurve fur die potentielle Enrgie U (x) in
diesem Punkt. Die eingezeichneten Beispiele zeigen:
i) x > 0 : tan > 0; dU > 0 ) F (x) < 0
dx
ii) x < 0 : tan < 0; dU < 0 ) F (x) > 0
dx
In beiden Fallen zeigt die Kraft in Richtung auf die Ruhelage der Feder, in Richtung auf das
Minimum der potentiellen Energie bei x = 0.
Wie bestimmt man die Kraft bei bekannter potentieller Energie ? Die Erfahrungen, die wir bei der Federkraft gewonnen haben lassen sich verallgemeinern. Fur eine beliebige
Kurve potentieller Energie U (x) (oder auch eine beliebige Potentialkurve V (x)), wie sie in Abbildung 2.46 durch den Hohenverlauf einer Berg- und Talbahn angedeutet ist, konnen wir die
Kraft aus der Steigung bestimmen. Da im Gravitationsfeld in Erdnahe die potentielle Energie
mit dem Abstand vom Erdboden linear zunimmt, kann man beliebige Potentiale durch solche
Hohenkurven veranschaulichen. Wie bei einer Berg- und Talbahn zieht es die Massen immer
in Richtung auf die Potentialmulden (Minima der potentiellen Energie). Ist die totale Energie
genugend gross (z. B. E0 ), dann ist die Bewegung nicht durch die Potentialberge (Wande der
potentiellen Energie) eingeschrankt, sie ist ungebunden. Der Bewegungszustand mit der totalen
Energie E0 ist ein ungebundener Zustand. Die Zustande mit E1 und E2 in der ersten und dritten
Mulde sind gebundene Zustande. Hier rutscht wie beim Oszillator die Masse, Kugel oder der
Wagen der Berg- und Talbahn in der Mulde hin- und her, wenn man von der Reibung absieht.
Man kann im ubrigen in der Nahe eines Minimums jede Kurve potentieller Energie durch die
eines Oszillator (Parabel) annahern.
2.86
Berg- und Talbahn
U(x)
E 0 ungebundener Zustand
T (x)=E -U(x)
0
0
E
U
U
2
U
E1
Umkehrpunkte
E
1
,E
2
gebundener Zustand
x
Abbildung 2.47: Potentielle Energie der interaAbbildung 2.46: Beliebiger Potentialverlauf tomaren Wechselwirkung fur zwei Wasserstomodelliert an einer Berg- und Talbahn.
Atome in einem Wassersto-Molekul.
Interatomare Wechselwirkung: Zwischen neutralen Atomen treten Krafte auf, die elektrischer Natur sind. Diese Wechselwirkung ist kompliziert und nur quantenmechanisch berechenbar, nicht aber mit der Newton'schen Mechanik. Man kann sie aber doch durch ein abstandsabhangiges Potential V (r) oder eine aquivalente Kurve, die die potentielle Energie U (r)
in Funktion des Abstands zeigt. darstellen, wie es Abbildung 2.47 zeigt. In dieser Abbildung
ist in etwa der Verlauf der potentiellen Energie fur ein Wassersto-Molekul skizziert. Die theoretischen Physiker Walter Heitler (1904-1981, von 1949 bis 1974 Professor an der Universitat
Zurich) und Fritz London haben diese homoopolare Bindung zum ersten Mal 1927 berechnet.
Fur r > r0 sind die Krafte anziehend, fur r < r0 stark abstossend. Ist die Energie E negativ,
so sind die Atome chemisch zu einem Molekul gebunden. Den Abstand r0, wo die potentielle
Energie ihr Minimum hat, nennt man den Gleichgewichtsabstand. In der Nahe des Minimums
kann man die potentielle Energie wie gezeigt durch den Oszillator-Verlauf annahern. Wie der
Oszillator konnen auch die Atome harmonische Schwingungen ausfuhren. Diese sind harmonisch,
solange man nicht allzu weit vom Minimum weg ist, d. h. E hinreichend klein ist. Je grosser E
ist, desto starker ist das Molekul angeregt, und umso grosser wird die Schwingungsamplitude.
Ist E > 0, so bedeutet dies Dissoziation in zwei Atome.
Erdanziehung und Gravitation: Abbildung 2.48 zeigt den Verlauf der potentiellen Energie in Funktion von r, dem Abstand vom Zentrum der als kugelformig angenommenen Erde.
U (r) = ; ;Mm = ; ;Mm rE = mgr rE ;U rE
r
rE r
E
0
r
Eine Masse, die sich im Erdfeld bewegt hat eine totale Energie E = T (r) + V (r). Fur alle
geschlossenen
Bahnen (gebundenen Zustande) gilt E < 0. Fur die Kreisbahn fanden wir v =
pgrE und damit
T = mgrE=2 = U0=2. Addieren wir dies zur potentiellen Energie an der
2.87
r
Erdoberache U (rE ) = ;U0 , so ergibt sich E = ;U0 =2.
Damit eine Rakete das Gravitationsfeld
verlassen kann, d. h. um in eine ungebundene Bahn zu kommen, muss ihre Startgeschwindigkeit v0 grosser sein als die sogenannte Fluchtgeschwindigkeit vF , welche
sich aus
2
p
Abbildung 2.48: Potentielle Energie einer Masse
m in Funktion des Abstands r vom Erdmittelpunkt. Die potentielle Energie ist in Einheiten
der potentiellen Energie auf der Erde aufgetragen, der Abstand in Einheiten des Erdradius.
Tmin = mv2 F = U0
zu vF = 2grE = 11:2 km/s ergibt. Fur
einen Flug zum Mond ist die minimale
Startgeschwindigkeit etwas kleiner, da das
Potentialmaximum durch das Gravitationsfeld des Mondes reduziert wird. Startet die Sonde allerdings exakt mit dieser
minimalen kinetischen Energie, so kommt
sie an der Stelle des Maximums zum Stillstand. Da dort die Anziehung des Mondes
gerade entgegengesetzt gleich zur Anziehung der Erde ist, ist die Sonde schwerelos und im labilen Gleichgewicht. Sie kann
zum Mond, aber auch zuruck zur Erde fallen.
2.7 Systeme von Teilchen
Bis jetzt haben wir uns ausschliesslich auf Beispiele konzentriert, wo wir im Wesentlichen
ein kleines Objekt betrachteten, eine Kugel, einen Klotz oder A hnliches, wo alle Teile starr
miteinander verbunden sind und daher die Angabe eines einzelnen Punkts fur die Beschreibung
der Bewegung genugt. Auch fur die Krafte spielten die Angrispunkte bisher im Detail keine
Rolle. Diese Beschrankungen wollen wir jetzt fallen lassen. Wir kommen jetzt zu Systemen von
vielen Teilchen, die miteinander starr oder auch beweglich verbunden sind.
2.7.1 Schwerpunkt
In den einleitenden Abschnitten, z. B. bei der Bewegung einer Primaballerina beim Grand
Jete (Abbildung 1.7) haben wir schon erwahnt, dass zwar nicht alle Korperteile der Tanzerin
der fur eine Bewegung im Erdfeld typischen Parabelbahn folgen, aber zum mindesten ein Punkt,
den wir Schwerpunkt nannten, dies tut. Wie nden wir diesen Punkt, und was zeichnet ihn aus ?
Wir beantworten zunachst den ersten Teil dieser Frage und werden dann durch Verallgemeinern
2.88
des 2. Newton'schen Prinzips fur Systeme von Teilchen im nachsten Abschnitt dann auch den
zweiten Teil der Frage beantworten.
Fur zwei Massen m1 und m2 (m1 + m2 = M ), die auf einer Achse an
den Koordinatenpunkten x1 und x2 mit dem Abstand d liegen, liegt der
x
m
1 S m2
Schwerpunkt (center of mass) S bei
x
x1 x d
m
x
+
m
x
m
1
1
2
2
1
2
xS = m + m = x1 + M d
1
2
Der Schwerpunkt liegt also zwischen den beiden Massen und naher bei der schwereren. Wenn
wir es mit mehreren Massen zu tun haben, konnen wir die Denition erweitern zu
u
xs = m1xm1 ++mm2 x2: :: ::: ::: :: :++mmnxn = M1
1
n
2
n
X
i
r
x
mixi
M ist die totale Masse des Systems. Wenn wie einzelnen Teile des Systems nicht entlang einer
Achse, sondern raumlich verteilt sind, so erweitern wir die Denitionen auf drei Koordinaten
statt einer
xs = M1
n
X
i
mixi
yS = M1
n
X
i
miyi
zS = M1
n
X
i
In vektorieller Form lasst sich dies schreiben als
n
X
~r = 1 m ~r
s
M
i
mi zi
i i
Oft besteht ein Objekt, ein Ball, ein Klotz ein Sandhaufen oder ahnliches aus so vielen gleichen Einzelteilen (Atomen, Sandkornern), dass wir von einer kontinuierlichen Materieverteilung
sprechen konnen. Die Massen mi der einzelnen Teile werden dann zu dierentiellen Massenelementen dm, die Summen in obigen Denitionen werden zu Integralen, und das Integral erstreckt
sich uber das gesamte Volumen V des Objekts:
Z
Z
Z
x = 1 xdm y = 1 ydm z = 1 zdm
s
M
V
S
M
V
S
M
V
Fur eine homogene Substanz mit konstanter Dichte erhalt man wegen M = V und
dm = dV
Z
1
xs = V xdV
V
Z
1
yS = V ydV
V
Z
1
zS = V zdV
V
Aus diesen Denitionen sieht man, dass die Lage des Schwerpunkts durch die Form des
Objekts bestimmt ist. Ist eine Massenverteilung symmetrisch bezuglich einer Achse, dann sind
die Beitrage zum Integral von beiden Seiten der Achse einander entgegengesetzt gleich. Der
Schwerpunkt liegt dann auf dieser Achse. Bei einer kugelsymmetrischen Massenverteilung liegt
der Schwerpunkt im Zentrum. Bei einem Quader liegt der Schwerpunkt ebenfalls im geometrischen Zentrum.
2.89
Beispiel NH3: Das Ammoniak-Molekul (NH3) hat Pyramidenform.
+
Das Stickstoatom liegt auf einer Achse, die senkrecht ist zur Ebene, die von den drei Wassersto-Atomen aufgespannt wird. Die drei
N
Wasserstoatome besetzen die Ecken eines gleichseitigen Dreiecks. Aus
10.14x10-11m
Symmetriegrunden liegt der Schwerpunkt auf der Achse durch das StickH
H
stoatom bei einer Hohe
-11m
9.4x10
H
1
m
14
hs = M (3mH 0 + mN h) = MN h = 17 h
Beispiel Coca-Cola: Wo liegt der Schwerpunkt einer Coca-Cola (Light) Buchse (siehe
Abbildung 2.49) ? Seine Lage andert sich mit der Hohe der verbleibenden Flussigkeit. Wir losen
diese Aufgabe an Hand gemessener Daten. Die leere Buchse hat eine Masse von MB = 18:8 g,
einen Aussendurchmesser von 6.6 cm und eine Hohe von h =11.5 cm. Wir nehmen an, dass die
Dicke der Wande uberall gleich ist, und berechnen die mittlere Wandstarke aus dem Volumen
und der Dichte von Aluminium ( (Al) = 2.7 g/cm3). Das Aussenvolumen der Buchse betragt
393.44 cm3 , das Mantelvolumen 6.96 cm3 (=18.8 g/2.7 g/cm3), das Innenvolumen daher 386.48
cm3 , und die Aussenache 306.87 cm2 . Dies ergibt eine mittlere Wandstarke von 0.227 mm, die
fur die weiteren U berlegungen vernachlassigt werden kann. Die volle Buchse hat eine Masse von
343 g und enthalt VFl = 0:33 ` Getrank. Buchse und Flussigkeit haben Zylindersymmetrie. Der
Schwerpunkt liegt also auf der Achse ( y ;Achse). Ist die Buchse leer, so liegt der Schwerpunkt
auf halber Hohe ysB = h=2 = 5:75 cm. Der Schwerpunkt der Fussigkeit (totale Masse 324.2 g,
Dichte 0.982 g/cm3 ) liegt bei der vollen Buchse auf halber Hohe der Flussigkeit, also bei yFl =
hFl=2 = 4:9 cm. Bezeichnen wir den verbleibenden Rest mit V0 = M0=Fl , die dazugehorige
Hohe des Flussigkeitsspiegels mit h0 = (V0=VFl)hFl , dann liegt der Schwerpunkt der Fussigkeit
bei ySFl = h0 =2. Fur Buchse und Inhalt ergibt sich dann
B + ySFl M0 = 18:8 5:75 + (h0 =2) (h0=9:8) 324:2 = 5:75 + 0:88h0 cm
yS = ySB M
M +M
18:8 + (h =9:8) 324:2
1 + 1:76h
2
B
0
0
0
Vom Anfangswert (volle Buchse) bei 4.95 cm Hohe sinkt der Schwerpunkt mit dem Flussigkeitsspiegel nach unten, erreicht bei 1.9 cm hohem Rest den tiefsten Punkt bei 2.06 cm und wandert
dann wieder nach oben bis zum Wert von 5.75 cm bei leerer Buchse (siehe Abbildung 2.49).
2.7.2 Newton's zweites Prinzip fur Systeme von Teilchen { der Schwerpunktssatz
Fur Systeme von Teilchen kann man aus dem 2. und dem 3. Newtonschen Prinzip allgemeinere Folgerungen ziehen. Wir betrachten dazu ein System von Massenpunkten mi , zwischen
denen innere Krafte G~ ik wirken, und die auch unter dem Einuss ausserer Krafte F~i stehen.
Fur jeden einzelnen Massenpunkt gilt das Aktionsprinzip
F~1 + G~ 21 + G~ 31 + : : : + G~ n1
F~2 + G~ 12 + G~ 32 + : : : + G~ n2
: : :: : :
F~n + G~ 1n + G~ 2n + : : : + G~ n;1;n
2.90
p1
= d~
dt
p2
= d~
dt
:::
pn
= d~
dt
Abbildung 2.49: Lage des Schwerpunkts einer Buchse Coca-Cola. Bei der vollen Buchse liegt
der Flussigkeitsspiegel bei y = 9:8 cm.
Beachten wir nun das 3. Newton'sche Prinzip: G~ ik = ;G~ ki , und addieren wir diese Gleichungen, so heben sich die inneren Krafte paarweise heraus:
n
X
Fi = dtd ~pi
n
X
~
i=1
i=1
Diese Gleichung schreiben wir noch etwas um. Fur konstante Massen ist
X
i
~pi =
X
i
mi~vi =
X d~ri d X
mi dt = dt mi~ri
i
i
Benutzen wir nun die Denitionsgleichung fur den Schwerpunkt
X
X
~r = 1 m ~r
M= m
S
M
i
i i
und dierenzieren sie nach der Zeit, so ergibt sich
X
i
i
i
~pi = dtd (M~rS ) = M d~dtrS = M~vS
~vS heisst die Schwerpunktsgeschwindigkeit. Mit diesen Denitionen folgt der Schwerpunkts-
satz:
N
X
~
i=1
Fi = M d~dtvS = M~aS
~aS ist die sogenannte Schwerpunktsbeschleunigung. Der Schwerpunktssatz besagt
2.91
Der Schwerpunkt S eines Systems von Massenpunkten bewegt sich so,
als ob in ihm die gesamte Masse konzentriert ist und
samtliche ausseren Krafte an ihm angreifen.
Fur allgemeine Massenpunktsysteme gibt der Schwerpunktsatz keine Auskunft uber die Bewegung einzelner Teilchen. Er macht nur Aussagen uber die Bewegung eines Punkts, des Schwerpunkts S , der ubrigens nicht einmal mit einem Massenpunkt des Systems zusammenfallen muss.
Fur starre Korper beschreibt der Schwerpunktsatz die Translation. Formal ist er zum 2.
Newton'schen Prinzip aquivalent, wie wir es fur einen Massenpunkt formuliert haben. Er liefert
eine Bewegungsgleichung fur S , woraus die Schwerpunktsbewegung und damit die Translationsbewegung bestimmt werden kann. Dagegen ist er nicht in der Lage etwas uber die Drehbewegung
auszusagen. Dafur benotigen wir eine weitere Bewegungsgleichung, auf die wir spater zu sprechen kommen werden. Beschranken wir uns auf Translationen, so konnen die starren Korper wie
Massenpunkte behandelt werden, wie wir das bisher auch, zunachst noch ohne Rechtfertigung
getan haben.
Beispiel { Grand Jete: Die einzige Kraft, die auf die Tanzerin nach dem Sprung wirkt,
ist die Schwerkraft. Der Schwerpunkt der Tanzerin folgt also einer Wurfparabel, die durch die
Geschwindigkeit beim Absprung gegeben ist.
Beispiel { Kniebeugen auf einer Waage: Die Anzeige einer Waage verandert sich,
wenn die daraufstehende Person nicht ruht, sondern sich bewegt, z. B. eine Kniebeuge macht.
Man beobachtet, dass beim in die Hocke gehen die Anzeige kleiner wird, wahrend sie beim
Hochgehen grosser wird als die statische Belastung. Wir nden hier eine ahnliche Situation,
wie wir sie schon beim Federpendel auf der Waage im Abschnitt 2.5.4.1.1 (Abbildung 2.32)
angetroen haben. Wir bezeichnen die Normalkraft der Waage auf die Person mit NWP und
ihre Reaktionskraft mit NPW , und erinnern uns, dass die Anzeige der Waage jNPW j entspricht.
Wir nden, wir den Schwerpunktssatz auf die Person anwenden
m~aS = G~ + N~ WP
mit N~ WP = ;N~ PW
Wahlen wir eine z ;Achse senkrecht zur Waage nach oben, dann lesen sich die obigen Gleichungen wie folgt
maz = ;mg + NWP ) NWP = m(g + az )
Bei Ruhe ist az = 0, bei Bewegung nach unten az < 0 und beim Aufrichten ist az > 0. Daher
ist NWP = NPW = mg , NWP = NPW < mg bzw. NWP = NPW > mg fur die drei Falle. Wenn
man in die Knie geht, muss man allerdings die Bewegung nach unten auch wieder abbremsen,
um die gebeugte Ruheposition einzunehmen. Dieses Abbremsen entspricht az > 0 und damit
wieder einem grosseren Ausschlag. Die beobachtete Sequenz der Anzeige ist also die folgende:
i) Stehen - statische Belastung, ii) in die Knie gehen - kleinerer Ausschlag, iii) Abbremsen grosserer Ausschlag, iv) Hocke - statischer Ausschlag, v) Hochgehen - grosserer Ausschlag, vi)
Abbremsen - kleinerer Ausschlag, vii) Stehen - statischer Ausschlag.
Die Ausschlage einer besonders empndlich eingestellten Waage, die die Zeitstruktur des
Pulsschlags der darauf stehenden Person haben, stammen ebenfalls von minimalen A nderungen
des Schwerpunkts einer entsprechenden, durch das Zusammenziehen des Herzmuskels verursachten Schwerpunktsbeschleunigung.
2.92