Warnung
Werbung

Warnung
–
if you have a schwaches Gemüt, then do not proceed -
Die folgende Jugensünde wurde von mir zwangsweise während meiner Sturm- und
Drangzeit erstellt. Für die stylistischen und sonstigen Missgriffe brauche ich mich daher in
keinster weise bei niemandem entschuldigen.
Bei der Herstellung verwendete ich wegen schon damals schwacher Finanzkraft ein aus
einem 30 Mark 10-Pack stammendes Textprogramm. Um das in einem eigenartigen
Format abgespeicherte, auf 5 Dateien verteilte Dokument doch noch der gespannten
Allgemeinheit publik zu machen, habe ich jede Datei zunächst mittels eines PostscriptDruckertreibers in eine ps-Datei gedruckt, die sich dann nicht mehr vernünfitg ansprechen
lässt, diese dann in pdf konvertiert und die 5 pdf-Dateien mittels eines Open Source
Programms zu einer zusammengefügt. Bei all diesen Operationen sind einige der Figuren
im Text durcheinander geraten, was den unästhetischen Wert dieser Sünde jedoch nur
noch mehr erhöht!
Ich wünsche ein fröhliches Grausen!
Ignaz-Taschner Gymnasium Dachau
Kollegstufe
Abiturjahrgang 1999
FACHARBEIT
im Leistungskurs Mathematik
Thema:
Kriterien und Sätze über Kollinearität dreier Punkte und Konvergenz dreier Geraden
Verfasser:
Martin Kohls
Leistungskurs:
Mathematik M2
Kursleiter:
StD Johannes Guckel
Abgabetermin:
1. Februar 1999
Erzielte Note:
........... in Worten: .................
Erzielte Punkte: ............ in Worten: .................
(einfache Wertung)
Mit dem Kollegiaten besprochen am: ...................................
Dem Direktorat vorgelegt am: ................................
Unterschrift des Kursleiters:
korrigierte Fassung
..................................
Inhaltsverzeichnis
1.
Einleitung
2.
Kriterien für Konvergenz und Kollinearität
2.1.
Allgemeines Kriterium für Punkte und Geraden in R²
2.2.
Spezialform des Kollinearitäts-Kriteriums
2.2.1.
Beispiel: Kollinearität von Fixpunkt und beiden Zentren bei Verkettung
zentrischer Streckungen
2.3.
Der Satz von Menealos
2.3.1.
Schnittpunkte der Winkelhalbierenden mit den Gegenseiten
2.3.2
Der Satz von Monge und eine Folgerung
2.3.3.
Schnittpunkte von Umkreistangente und
verlängerter Gegenseite
2.4.
Der Satz von Ceva
2.4.1.
Kombination der Sätze von Ceva und Menealos
2.4.2.
Winkelform des Satz von Ceva bzw. Menealos
2.4.3.
Anwendung auf Transversalen im Dreieck
- Seitenhalbierende
- Winkelhalbierende
- zwei Aussen- und eine Innenwinkelhalbierende
- neuer Beweis für 2.3.1.
- Höhen
- neuer Beweis für 2.3.3.
2.4.4.
zwei weitere Folgerungen aus dem Satz von Monge
2.4.5.
Aufgabe 3 aus der 2.Runde des BWM 1996
2.4.6.
Satz vom Umkreistangentendreieck (Gergonne-Punkt)
2.4.7.
Der Nagel-Punkt
2.4.8.
Satz vom Schnittpunkt der Geraden durch die Eckpunkte und die Spitzen
der gleichschenkligen Dreiecke an der Gegenseite mit gleichen
Basiswinkeln
2.4.8.1.
Der Fermat-Punkt
2.4.8.2.
Interpretation bei gleichschenklig-rechtwinkligen Dreiecken mit dem Satz
von
Aubel
3.
Weitere Sätze aus der projektiven Geometrie
3.1.
Der Satz von Desargues
3.1.1.
Analytischer Beweis (in der Ebene)
3.1.2.
Beweis im Raum
3.1.3.
Spezialfälle und verschiedene Realsierungen
3.1.4.
Beweis des Kehrsatzes über die Dualform
3.2.
Der Satz von Pappos
3.2.1.
Beweis
3.2.2.
Spezialfälle, Realisierungen
3.2.3.
Dualform des Satz von Pappos
3.3.
Der Satz von Pascal und verwandte Sätze
3.3.1.
Beweis
- durch Koordinatenrechnung
- Trigonometrisch
3.3.2.
Spezialfälle
3.3.3.
Dualform: Der Satz von Brianchon
3.3.4.
Anwendung auf Tangenten- bzw. Sehnenvierecke
3.3.4.1.
Schnittpunkt der Geraden durch die Berührpunkte
und der Diagonale im Tangentenviereck
3.3.4.2.
Diagonalschnittpunkt des Sehnen-/Tangentenvierecks
3.3.4.3.
Kollinearität der Schnittpunkte gegenüberliegender
Seiten des Sehnen-/Tangentenvierecks
3.3.5.
3.3.5.1.
Der Satz von Steiner an zwei Spezialfällen
Äußeres Tangentensechseck aus dem Sehnensechseck
bzw. inneres Sehnensechseck aus dem Tangentensechseck
3.3.5.2.
Inneres Tangenten
äußeres Sehnensechseck aus dem Tangentensechseck
4. Anhang - Der Chordalschnittpunkt
Literaturverzeichnis
Erklärung
-1-
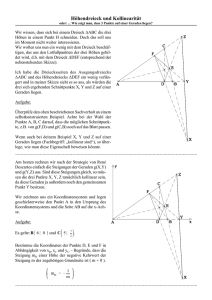
1. Einleitung
Zuerst sollte der Zusammenhang zwischen drei sich schneidenden (in einem
Punkt konvergierenden) Geraden und drei auf einer Geraden liegenden (kollinearen) Punkte verdeutlicht werden:
g2
Der in der Abb. dargestellte Sachverhalt kann auf
B
g3
g1
zwei Arten beschrieben werden:
1. Die Geraden g1, g2, g3 schneiden sich in einem
S
Punkt, oder
A
2. S ist der Schnittpunkt von g1 und g2, und die
Punkte A, S, B sind kollinear.
Das ist hier noch trivial, doch später ergeben sich so für einen Satz versch. Formulierungen, die auf den ersten Blick als nicht gleichwertig erscheinen.
Die Konvergenz von Lichtstrahlen in einem Punkt ist z.B. in der Optik von Bedeutung, um ein scharfes Bild zu erhalten. Die Konvergenz bestimmter Dreieckstransversalen wie Mittelsenkrechte oder
Winkelhalbierende war wohl schon Euklid
bekannt, wenn auch in seinen Elementen
C
nicht direkt angesprochen1.
scheinbar bekanntes birgt neues, wie folgen-
H_B
H_A
A
Doch auch
H_C
B
des Bsp. zeigt: Wie jeder weis, schneiden
sich die drei Höhen eines Dreiecks in einem
Punkt. Weniger geläufig ist jedoch die Tatsache, dass die Schnittpunkte der verlängerten
Seiten des Höhenfußpunktdreiecks mit den
entsprechenden Dreiecksseiten auf einer Geraden liegen. Im Folgenden sollen nun die
Grundlagen (Kriterien) zum Beweis solcher
Sätze vorgestellt und dann an entsprechenden Beispielen angewendet werden.
2. Kriterien für Konvergenz und Kollinearität
2.1 Allgemeines Kriterium für Punkte und Geraden in R²
1
vgl. Übersetzung v. Clemens Thaer, "Die Elemente von Euklid", Thun; Frankfurt am Main 19973, Buch IV, §§4, 5
(S. 78f) sowie Anmerkungen auf S. 429
-2Besonders leicht lässt sich die Kollinearität dreier Punkte A, B, C dann feststel-
→ →→
len, wenn ihre Ortsvektoren A , B , C durch Koordinatendarstellung gegeben
→
→
sind. Wenn nämlich zwei Verbindungsvektoren, z.B. AB und BC vielfache
voneinander sind, also linear abhängig, dann folgt daraus die Kollinearität. Da
→
→ →
A, B, C ∈ R 2 muß dann das 2,2-System λ 1 AB + λ 2 BC = 0 (∗) für λ 1 , λ 2
unendlich viele Lösungen haben, womit man als Kollinearitäskriterium aus der
Bedingung für eine unendliche Lösungsmenge homogener System erhält:
→
→
x − xA xC − xB
det(AB, BC) = B
yB − yA yC − yB
1 xA yA
= 1 xB yB
1 xC yC
= 0 . Das zweite
Gleichheitszeichen sieht man entweder direkt durch ausmultiplizieren oder
durch algebraische Umformungen ein2. Die zweite Determinante kann man geometrisch
(x A , y A,
mit A, B, C auch die Punkte
1), (x B , y B , 1), (x C , y C , 1) kollinear sind. Der Ursprung und die
so
interpretieren,
dass
Gerade aus letzteren Punkten legen dann eine Ebene fest, womit die entsprechenden Ortsvektoren komplanar sind und die Determinante aus diesen Null
wird (vertauschte Zeilen/Spalten beeinflussen dabei nur das Vorzeichen).
Analog kann man sich nun ein Konvergenzkriterium für drei Geraden
g i : y = m i x + b i mit i = 1, 2, 3 überlegen. Man schneidet g 1 mit g 2 sowie
b −b
b −b
g 2 mit g 3 und erhält damit x 12 = m12 −m21 sowie x 23 = m23 −m32 (mit
m 1 ≠ m 2 ≠ m 3 ) . Da sich die Geraden in einem Punkt schneiden erhält man mit
x 12 = x 23 und nach wenigen Umformungen als Konvergenzkriterium
(m 2 − m 1 )(b 3 − b 2 ) − (m 3 − m 2 )(b 2 − b 1 ) = 0 . Ersetzt man im Kollinearitätskriterium jeweils x durch m und y durch b sowie A, B, C durch 1,2,3 so
erhält man nach ausrechnen der Determinante exakt den gleichen Ausdruck. Damit erhält man also als Konvergenzkriterium
1 m1 b1
1 m2 b2
1 m3 b3
= 0 , wobei die
Analogie zwischen beiden Ausdrücken wieder auf die Dualität zwischen den
Relationen Konvergenz/Kollinearität hindeutet.
2.2. Spezialform des Kollinearitätskriteriums
Mit den beiden Kriterien liese sich rein theoretisch jeder (elementargeometrische) Satz bezüglich Konvergenz/Kollinearität beweisen, denn es ist stets
2
Gottwald, S., Meyers kleine Enzyklopädie Mathematik, Zürich 199514, S. 310;
Gascha H., Compact Handbuch Mathematik, München 1992, S. 267
-3-
möglich, Kreise, Dreiecke usw. mit Koordinatengleichungen zu beschreiben und
dann die Kriterien anzuwenden. Das führt jedoch i.A. zu einem sehr großen Rechenaufwand, weshalb die obigen Kriterien zu Beweiszwecken kaum Verwendung finden. Doch (∗) in 2.1 lässt sich auf eine umgänglichere Form bringen:
→ →
→ →
→
→
→ →
λ 1 ( B − A ) + λ 2 ( C − B ) = −λ 1 A + (λ 1 − λ 2 ) B + λ 2 C = 0 , bzw.
→ → → →
α A + β B + γ C = 0 , wobei man aus obiger Gleichung als notwendige Bedingung für Kollinearität sieht, dass α + β + γ = 0 . Die Bedingung ist auch hinreichend, denn aufgelöst nach γ ergibt sich nach einsetzen
→ →
→
→ →
→ → →
α A + β B − (α + β) C = α( A − C ) + β( B − C ) = 0 , also
→
→ →
αCA + βCB = 0 . Aus der linearen Abhängigkeit ergibt sich die Kollinearität
der drei Punkte.
Es gilt also3: A, B, C kollinear ⇔ ∃(α, β, γ) | α + β + γ = 0
→ → → →
∧ αA +βB +γC = 0
(wobei α 2 + β 2 + γ 2 > 0 )
2.2.1. Beispiel: Kollinearität von Fixpunkt und beiden Zentren bei Verkettung
zentrischer Streckungen4
Bildet man eine Ebene hintereinander durch zwei verschiedene zentrische Strekkungen auf sich ab, so liegt der Fixpunkt dieser neuen Abbildung (er ist das
Zentrum einer einzigen zentrischen Streckung, die die anderen beiden ersetzt)
und die beiden Zentren auf einer Geraden.
Wie die Abbildung zeigt, erhält man für eine
Zentrische Streckung um Z mit Streckfaktor
m
die
Abbildungsgleichung5
→
→ →
→ → →
s( Z , m) : X → X = m( X − Z ) + Z
Für die Verkettung zweier zentrischer Strek-
→
→
kungen s(Z 1 , m 1 ) s(Z 2 , m 2 )
damit
als
erhält man
Abbildungsgleichung
→
→
→
→ →
→
=
((m
(
−
)
+
)
−
X
m1
Z2 Z2 Z1) + Z 1
2 X
Für den Fixpunkt Z 0 muss dabei gelten Z 0 = Z 0 , womit man nach einsetzen
→
→
→
von
und
umstellen
erhält,
dass
X = X = Z0
→
→
→ →
(m 1 m 2 − 1)Z 0 + (m 1 − m 1 m 2 )Z 2 + (1 − m 1 )Z 1 = 0 . Damit ein Fixpunkt
existiert, muss offensichtlich m 1 m 2 − 1 ≠ 0 sein. Dann sind wegen
3
Schneebeli, H.R., Geometrie von Fall zu Fall, Zürich 1991, S. 70, 78
4
5
Schüler Duden - Die Mathematik I, Mannheim 1990 , Stichwort "Ähnlichkeitsabbildungen", S.20
Friedrich Barth, Gert Krumbacher, Elisabeth Matschiner, Anschauliche Geometrie 3, München 19881 , S. 54
5
Die Formel ist in Analogie zu den linearen Funktionen der komplexen Zahlen gebildet
-4-
(m 1 m 2 − 1) + (m 1 − m 1 m 2 ) + (1 − m 1 ) = 0
nach
(2.2)
Z 0, Z1 , Z 2
kollinear.
2.3. Der Satz von Menealos6
Dieser Satz stellt ein komfortables Kollinearitätskriterium dar, wenn die drei zu
untersuchenden Punkte auf den
C=0
(verlängerten) Seiten eines Drei-
T1
ecks liegen.
T3
Es lautet: Teilen die Punkte
T2
B
A
die
Seiten7
T 1, T 2 , T 3
[CA], [AB], [BC] jeweils im
Verhältnis τ 1, τ 2 , τ 3 und gilt
τ 1 ⋅ τ 2 ⋅ τ 3 = −1, dann sind
T 1, T 2 , T 3 kollinear.
Beweis:
O.B.d.A. kann man C = 0 setzen. Aus der aus der analytischen Geometrie bekannten Formel für den Teilpunkt einer Strecke bei gegebenem Teilverhältnis
→
→
→ →0 +τ 1 →
→ →
→ →
A
A +τ 2 B
B +τ 3 0
erhält man:
T 1 = 1+τ 1
T 2 = 1+τ 2
T 3 = 1+τ 3
→ →
−1
Wählt man nun A , B
als Basis und setzt τ 2 = τ 1 τ 3 so erhält man
−1 →
→
→
→
τ 1τ3
τ 1τ 3 →
1
−1
T2 =
1 A +
1 B = τ 1 τ 3 −1 A + τ 1 τ 3 −1 B , also
1− τ
1− τ τ
1 3
τ1
1+τ 1
1τ 3
→
T1 =
0
Man
sucht
nun
ein
τ τ3
→ τ 1 τ13−1
T 2 = −1
τ 1 τ 3−1
(α, β, γ)
Tripel
mit
→ 0
T3 = 1
1+τ 3
α+β+γ =0
und
→ →
→ →
αT 1 + β T 2 + γT 3 = 0 - dann sind nach (2.2.) die drei Punkte kollinear.
β = (τ 1 τ 3 − 1) ,
γ = 1 + τ 3 , so sind
Wählt man α = −τ 3 (1 + τ 1 ),
−τ 3 − τ 1 τ 3 + τ 1 τ 3 − 1 + 1 + τ 3 = 0
beide Bedingungen erfüllt:
→
−τ 1 τ 3 + τ 1 τ 3 + 0 = 0
A -Komponente:
→
0−1+1= 0
B -Komponente:
Damit sind T 1, T 2 , T 3 kollinear.
Bei dieser Formulierung handelt es sich genaugenommen um den Kehrsatz - die
ursprüngliche Formulierung lautet, das eine Gerade die Dreiecksseiten derart
6
Schüler Duden - Die Mathematik II, Mannheim 19905 , Stichwort "Menealos, Satz von", S. 274
Gottwald, S. Meyers kleine Enzyklopädie Mathematik, Zürich 199514, S.313
7
man beachte, das man hier die Reihenfolge der Punkte bei den Seiten beachten muss: Es macht einen Unterschied, ob
die Strecke [AB] oder die Strecke [BA] in einem bestimmten Verhältnis geteilt wird!
-5-
teilt, das das Produkt der Teilverhältnitsse -1 ergibt. Aufgrund der Eindeutigkeit
von Teilpunkten bei gegebenem Teilverhältnissen sind beide Formulierungen jedoch prinzipiell gleichwertig. In der letzten Formulierung lässt sich der Satz
auch leicht geometrisch herleiten8:
Es sei CD AB . Dann gilt:
C=0
τ1 =
D
T1
CT 1
τ2 = − T
T3
τ3 =
T2
=
T1 A
AT 2
CD
AT 2
2B
BT 3
T3 C
=
T2B
CD
,
also τ 1 ⋅ τ 2 ⋅ τ 3 = −1
Für den Fall, dass auch τ 1 , τ 3 < 0
B
A
läuft der Beweis analog.
2.3.1. Schnittpunkte der Winkelhalbierenden mit den Gegenseiten
A'
C
B'
A'
C
A
W
B
A
W
B
B'
Zum Beweis der nächsten Sätze benötigt man die folgende Beziehung: Die halbierende des (Aussen-) Innenwinkels eines Dreiecks teilt die Gegenseite (aussen) innen im Verhältnis der anliegenden Seiten9:
Es sei jeweils CW die Winkelhalbierende. Man spiegle jeweils A, B an dieser
und erhält somit A , B . Dann gilt:
AW
WB
=
AA
BB
=
AC
CB
=
AC
CB
Damit lassen sich nun leicht folgende Sätze beweisen:
1) Die Schnittpunkte der halbierenden des Außenwinkels mit den Gegenseiten
liegen auf einer Geraden.
2) Die Schnittpunkte der halbierenden zweier Innenwinkel und eines Aussenwinkels mit den jeweiligen Gegenseiten liegen auf einer Geraden.
(Zeichnungen auf der nächsten Seite.)
Es werden jeweils die Seiten [AB] , [BC] , [CA] von den Punkten W C , W A ,
W B im Verhältnis τ C , τ A , τ B geteilt. Dann gilt
b
c
a
1) τ C = − a , τ A = − b , τ B = − c
8
vgl. auch Anschauliche Geometrie 3, S. 33
9
Schüler Duden - Die Mathematik I, Mannheim 19905 , Stichwort "Winkelhalbierende", S. 497
-6-
τ C = − ba , τ A = bc ,
τ B = ac
Da beidemal τ A ⋅ τ B ⋅ τ C = −1, sind jeweils W A , W B , W C kollinear10.
2)
1)
W_B
C
A
B
W_C
W_A
2)
(da es drei Möglichkeiten für die Wahl der
C
W_B
AußenwinkelhalbierenW_A
de gibt (bei Punkt A ,
B oder C ), gibt es drei
A
B
W_C
solche Geraden!)
Zu 1) noch ein Hinweis: Da sich jeweils zwei Außenwinkelhalbierende und eine
Innenwinkelhalbierende in einem Ankreismittelpunkt11 schneiden (aufgrund der
Eigenschaft von geometrischen Örtern) erhält man somit ein Dreieck, das aus
den drei Ankreismittelpunkten besteht und dessen Seiten die Außenwinkelhalbierenden sind. Da in ∆ABC jeweils Innen- und Außenwinkelhalbierende aufeinander senkrecht stehen, und jede Innenwinkelhalbierende durch einen
10
11
Dabei wird natürlich vorausgesetzt, das alle Schnittpunkte auch exisitieren, also dass das Dreieck nicht gleichschenklig ist (sonst wäre ein Teilverhältnis gleich -1).
Schüler Duden - Die Mathematik I, Mannheim 19905 , Stichwort "Ankreis", S. 24; Siehe auch 2.4.3.
Gottwald, S., Meyers kleine Enzyklopädie Mathematik, Zürich 199514, S.170f
-7-
Ankreismittelpunkt
geht,
∆ABC
ist
das
Höhenfußpunktdreieck
des
Ankreismittelpunktdreiecks.
Damit entspricht 1) dem Satz aus der Einleitung (Dort ist ∆ABC das Ankreismittelpunktdreieck zu ∆H A H B H C . Dabei ist dann z.B. H A A eine Innenwinkelhalbierende und BC eine Aussenwinkelhalbierende von ∆H A H B H C .)
2.3.2. Der Satz von Monge und eine Folgerung
Der Satz von Monge12 besagt:
1) Bei drei Kreisen mit den Radien r 1 ≠ r 2 ≠ r 3 liegen die Schnittpunkte der
äußeren Tangentenpaare
zu je zwei Kreisen auf ei-
T1
ner Geraden.
Die Folgerung besagt:
M3
T2
2)
Bei drei Kreisen mit
den Radien r 1 ≠ r 2 ≠ r 3
liegen die Schnittpunkte
M1
T3
zweier innerer Tan-
M2
gentenpaare und eines äußeren Tangentenpaares zu
je
zwei Kreisen auf ei-
ner Geraden13.
M3
Beide Beweise laufen analog
T2
wie bei (2.3.1.):
T1
M1
M2
T3
1) Die Strecken [M 1 M 2 ] ,
[M 2 M 3 ] , [M 3 M 1 ] werden
von T 3 , T 1 , T 2 in den
Verhältnissen
r1
r2
r2
r3
r3
r1
τ3 = −
τ1 = −
τ2 = −
geteilt.
Da τ 1 ⋅ τ 2 ⋅ τ 3 = −1, sind T 1 , T 2 , T 3 kollinear.
12
Anschauliche Geometrie 3, S.56
13
Auch dieser Satz lässt sich mit der in Anschauliche Geometrie 3 verwendeten Methode zum Beweis des Satz von
Monge beweisen. Sie beruht auf Satz (2.2.1.), wobei mit S(Z, m) die zentrische Streckung um Z, Streckfaktor m
bezeichnet ist. Es ist offensichtlich
67UU67UU=67UU
weswegen nach (2.2.1) die Zentren 7 7 7
kollinear sind
-8-
2) Hier ist
τ 3 = − r 12
r
τ 1 = + r 23
r
τ 2 = + r 31
und τ 1 ⋅ τ 2 ⋅ τ 3 = −1
r
Hier würde auch bloß r 1 ≠ r 2 genügen. Damit alle drei möglichen Geraden
existieren, muss jedoch r 1 ≠ r 2 ≠ r 3 gefordert werden.
T2
2.3.3. Schnittpunkte von Um-
T1
kreistangente und verlängerter
C
*
o
T3
Gegenseite14
*
Satz: Bei einem beliebigen Drei-
o
B
A
eck liegen die Schnittpunkte der
Tangenten an
den Umkreis
durch einen Eckpunkt mit den entsprechenden Gegenseiten
auf einer Geraden.
T2
D
Für den Beweis geht man wieder
o
wie üblich vor, das man die einzel-
o
pi-*-o
nen Teilverhältnisse bestimmt und
K
E
ergibt.
C
T1
Man verwendet dazu den Satz,
o
o
T3
A
*
dann nachweist, das ihr Produkt -1
o
*
dass der Tangentenwinkel gleich
B
dem gegenüberliegenden Umfangswinkel ist (siehe F.S. S. 30).
14
Anschauliche Geometrie 4 (u. Lösungsheft) , S162/12; Dieser Satz ist ein Spezialfall des Satzes von Pascal. Dort
und in (2.4.3.) wird nochmals auf ihn eingegangen
-9Es wird nun zunächst τ 3 berechnet, die anderen Teilverhältnisse folgen dann
analog.
AT 3
=
sin o
sin(180 o −∗)
sin(180 o −∗)
=
sin o
CT 3
Es gilt:
CT 3
T 3B
(Sinussatz). Division beider Gleichungen liefert
AT 3
T3 B
2
o
= sin
= ba
sin∗
2
Damit erhält man, wenn man alle Teilverhältnisse wieder auf [AB] , [BC] ,
[CA] bezieht (und die äußere Teilung berücksichtigt) τ 3 = − b 2 , τ 1 = − c 2 ,
a
b
2
2
2
τ 2 = − ac 2 . Als Produkt ergibt sich wieder −1 womit der Satz bewiesen ist.
C=0
Zu diesem Satz gibt es auch einen
schönen geometrischen Beweis15:
T3
Es sei K der Umkreis von ∆ABT 2
E / D sind die Schnittpunkte von
BC / der Tangente an A mit K .
T2
S
Man vergleicht nun die Winkel, woA
bei z.B. mit A, α der Winkel α am
T1
B
Punkt A gemeint ist.
1. C, o → B, o (Tangentenwinkel)
→ T 2 , o (Faßkreis über EA ), also
ET 2 ||CT 3 (F-Winkel an AT 2 )
2. A, o → B, o (Tangentenwinkel) → D, o (Faßkreis über EA ), also
DE ||AC (Z-Winkel an AD )
3. B, (o + ∗) → A, (o + ∗) → T 2 , 180 o − (o + ∗) (Faßkreis über BD ),
also
T 2 D ||T 3 A (E-Winkel an BT 2 )
(A, ∗→ B, ∗ folgt dabei wieder aus dem Tangentenwinkel)
Deswegen sind die Dreiecke ∆ACT 3 und ∆DET 2 zentrisch ähnlich, und die
Geraden durch entsprechende Eckpunkte, also AD, CE, T 3 T 2 schneiden sich
im Streckzentrum T 1 . Also ist T 1 ∈ T 3 T 2 , und die Punkte sind damit
kollinear16.
2.4. Der Satz von Ceva17
15
Dieser Beweis entspricht dem in Anschauliche Geometrie 3 auf S. 52 gegebenen zum Satz von Pascal, wenn man
jeweils zwei Punkte zusammenlaufen lässt
Das ist ein auch ein Beispiel dafür, wie die Tatsache, dass sich drei Geraden schneiden mit der Kollinearität dreier
Punkte gleichgesetzt wird (siehe Einleitung!)
17
Schüler Duden - Die Mathematik II, Mannheim 19905 , Stichwort "Ceva", S. 69f; Die dort gegebene
"physikalische Begründung" über Schwerpunktverlagerung funktioniert nur solange S innerhalb des Dreiecks
liegt, sonst würde man "negative" Gewichte benötigen
Gottwald, S. Meyers kleine Enzyklopädie Mathematik, Zürich 199514, S.312f
16
- 10 -
Dieses Konvergenzkriterium ist ähnlich wie der Satz von Menealos. Es besagt:
Teilen die Punkte T 1 , T 2 , T 3 die Strecken [AB] , [BC] , [CA] jeweils im Verhältnis τ 1 , τ 2 , τ 3 und gilt τ 1 ⋅ τ 2 ⋅ τ 3 = +1, so schneiden sich AT 2 , BT 3 ,
CT 1 in einem Punkt S .
Beweis:
Man setzt wieder C = 0 . Man erhält dann jeweils als Geradengleichung
→
→
→
→
A +τ 1 B
λ
also
CT 1 : X = λ ⋅ T 1 = λ ⋅ 1+τ 1 , mit λ = 1+τ
1
→
→
→
X = λ A + λ τ1 B
→ →
→ →
→ →
→
→
AT 2 : X = A + µ ⋅ AT 2 = A + µ(T 2 − A ) = (1 − µ) A + µT 2
→
→
→
und analog
X = (1 − µ) A + µ ⋅ 1+τ1 2 B ,
→
→
→
→
→
→ 0 +τ A
BT 3 : X = (1 − σ) B + σT 3 , hier mit T 3 = 1+τ33 , also
→
→
τ →
X = (1 − σ) B + σ ⋅ 1+τ3 3 A
Berechnung von CT 1 ∩ AT 2 :
→ →
Wegen der linearen Unabhängigkeit von A , B müssen für einen gemeinsamen
Punkt jeweils entsprechende Faktoren übereinstimmen, also
und
I: λ = 1−µ
II : λ τ 1 = µ 1+τ1 2 , also µ = λ (τ 1 + τ 1 τ 2 )
1
Einsetzen in I : λ (1 + τ 1 + τ 1 τ 2 ) = 1, also λ = 1+τ +τ τ
1 1 2
Berechnung von CT 1 ∩ BT 3 :
1+τ
τ
I : λ = σ 1+τ3 3 , also σ = λ τ 3 3 und II : λ τ 1 = 1 − σ
τ
τ τ +1+τ
I in II : λ 1 3τ 3 3 = 1 , also λ = 1+τ 3+τ3 1τ 3 = 1 1 .
τ 3 +1+τ 1
1
1
1
Nach Vor. ist τ 3 = τ 1 τ 2 , also ist λ = τ τ +1+τ = 1+τ +τ τ
1 2
1
1 1 2
Beide Schnittpunkte sind also identisch, die drei Geraden schneiden sich in einem Punkt.
Auch hier gilt die Umkehrung, dass also drei Geraden durch S die Gegenseiten
in entsprechenden Verhältnissen teilen. Das lässt sich leicht mit dem Satz von
Menealos beweisen18
(1): Menealos in ∆AT 1 C (B, S, T 3 kollinear):
(2): Menealos in ∆T 1 BC (A, S, T 2 kollinear):
18
→
AB
→
BT 1
→
T 1A
→
AB
⋅
⋅
→ →
T 1 S CT 3
→ ⋅ →
SC T 3 A
→
→
BT 2 CS
→ ⋅ →
T 2 C ST 1
= −1
= −1
Anschauliche Geometrie 3, S34.
Die nicht ganz korrekte Schreibweise der "Division" linear abhängiger Vektoren ist wie im Schüler Duden unter dem
Stichwort "Menealos" zu verstehen.
- 11 -
Multiplikation von (1) und (2):
→
AT 1
→
T 1B
⋅
→
BT 2
→
T2 C
⋅
→
CT 3
→
T3A
= τ 1 ⋅ τ 2 ⋅ τ 3 = +1 , womit
der Satz bewiesen19 ist.
2.4.1. Kombination der Sätze von Ceva und Menealos
Satz: Gegeben sei ein beliebiges Dreieck ∆ABC und ein beliebiger Punkt P
(der auch ausserhalb von ∆ABC liegen kann). Die Schnittpunkte der Geraden
durch eine Ecke und dem Punkt P mit den Gegenseiten seien mit T A , T B , T C
bezeichnet. Die Schnittpunkte
S_B
jeweils zweier Gegenseiten von
∆ABC und ∆T A T B T C seien
S A , S B , S C . Dann sind S A , S B ,
S C kollinear20.
C
T_B
T_A
(Zeichnung auf der nächsten
P
A
B
T_C
Seite)
S_C
Beweis21:
S_A
Die Seiten [AB] , [BC] , [CA]
werden von T C , T A , T B bzw.
von S C , S A , S B in den Verhältnissen τ C , τ A , τ B bzw. σ C ,
σ A , σ B geteilt. Dann gilt nach
Voraussetzung jeweils:
I
(nach Ceva), und
S_B
II : σ A τ B τ C = −1
III : τ A σ B τ C = −1
IV : τ A τ B σ C = −1
(Menealos).
C
Multiplikation der letzten drei
T_B
Gleichungen liefert
T_A
σ A σ B σ C ⋅ (τ A τ B τ C ) 2 = −1,
mit I also σ A σ B σ C = −1 .
A
B
S_C
T_C
Damit sind nach Menealos S A ,
S B , S C kollinear.
(Hinweis: Aus I und IV folgt z.B. auch das τ C = −σ C usw., dass also
A, T C , B, S C harmonische Punkte sind22)
P
19
Wegen der Eindeutigkeit von Teilverhältnissen sind auch hier Satz und Kehrsatz prinzipiell identisch, weshalb der
zweite, kürzere Beweis (auch alleine) zur Begründung gereicht hätte. Der relativ aufwendige Vektorbeweis
demonstriert jedoch gut diese Art des Beweisens über vergleichen der Parameter.
20
Dieser Satz ist ein Spezialfall des Satz von Desargues, siehe (3.1.)
21
eigentlich müsste man noch Voraussetzen, das jeder Schnittpunkt auch existiert, d.h. P darf z.B. nicht auf einer der
Seitenhalbierenden liegen (sonst wären die entsprechenden Gegenseiten Parallel!). Ansonsten kann man ein Teilverhältnis von -1 (also Parallelität) als Schnittpunkt "im Unendlichen" interpretieren.
22
Schüler Duden - Die Mathematik I, Mannheim 19905 , Stichwort "Viereck", S. 483f
- 12 -
Man beachte hier auch "besondere" Geraden wenn man für P den Schnittpunkt
der Winkelhalbierenden23 oder der Höhen wie im Satz aus der Einleitung (der
hiermit bewiesen ist) wählt. (Für den Schwerpunkt funktioniert es allerdings
nicht, da dann die entsprechenden Seiten parallel wären)
∠PAB = α 1
C
∠CAP = α 2
alpha_2
P
alpha_1
A
B
P
alpha_2
C
CAP
alpha_1
A
B
C
gamma_1
gamma_2
T_B
T_A
S
alpha_2
A
23
alpha_1
T_C
x
beta_1
beta_2
B
Man beachte hier auch 2.3.1: nach 2) liegen die Schnittpunkte zweier Innen- und einer Außernwinkelhalbierenden
mit den entsprechenden Gegenseiten auf einer Geraden. Wählt man für P den Innkreismittelpunkt (Schnittpunkt der
Innenwinkelhalbierenden), so erhält man für T_A, T_B, T_C die Schnittpunkte der Innenwinkelhalbiernden mit
- 13 Ferner gilt: Die Geraden AT A , CS C , BS B schneiden sich in einem Punkt24
(entsprechendes gilt für BT B undCT C ).
Beweis:
Multiplikation I ⋅ III ⋅ IV liefert:τ A σ B σ C ⋅ (τ A τ B τ C ) 2 = +1,
also τ A σ B σ C = +1, weswegen sich die drei Geraden nach Ceva in einem Punkt
schneiden.
2.4.2. Winkelform des Satz von Ceva bzw. Menealos
Oft sind die Teilverhätltnisse nicht direkt gegeben, sondern nur der Winkel, die
die Gerade durch Eckpunkt und Teilpunkt mit den beiden anliegenden Seiten
einschließt. Dann müsste man zu Anwendung von Ceva/Menealos jedesmal umständlich mit Hilfe des Sinussatzes die einzelnen Teilverhältnisse bestimmen.
Macht man dies einmal allgemein, erhält man eine einfach anzuwendende Form
der beiden Sätze. Dazu zunächst folgende
Definition: Ein Winkel ∠CAB wird von P im Sinusverhältnis θ =
sin ∠PAB
sin ∠CAP
geteilt. Dabei werden gerichtete Winkel verwendet, d.h. das z.B.
∠CAP = 360 o − ∠PAC .
Beispiele:
T_B
θ=
C
sin ∠PAC
sin ∠CAP
=
sin α 1
sin α 2
> 0 (innere
Teilung)
T_A
A
B
T_C
den Gegenseiten. Die Schnittpunkte der drei Geraden durch T_A, T_B, T_C mit den Gegenseiten sind nach 2) gleich
den Schnittpunkten der jeweiligen Aussenwinkelhalbierenden mit den Gegenseiten; nach 2.4.1. liegen diese
Schnittpunkte auf einer Geraden, was auch die Aussage von 2.3.1. 1) ist. Somit hängen 1) und 2) über 2.4.1.
zusammen.
24
Das ist ein Spezialfall des Satzes von Pappos (siehe 3.2.) (Geradenstrahlen ASB und ASC , jeweils mit den drei
Punkten TB,
C, SB, und TC, B, SC. ; Nach Pappos liegen P, TA und (CSC)(BSB) auf einer Geraden.
- 14 -
∠PAB = α 1 , ∠CAP = 360 o − α 2
sin α 1
sin α 1
sin ∠PAB
θ = sin
= sin(360 o −α
=
−
<0
sin α 2
)
∠CAP
2
C
(aüßere Teilung).
90-gamma
A
h_a
90-beta
B
Es gilt nun folgender Satz:
Im ∆ABC liegen die Punkte T A , T B , T C jeweils auf entsprechenden Seiten,
und teilen die Winkel ∠CAB , ∠ABC , ∠BCA jeweils im Verhältnis θ A , θ B ,
θ C . Gilt nun θ A ⋅ θ B ⋅ θ C = +1 (bzw. θ A ⋅ θ B ⋅ θ C = −1 ), so schneiden sich
AT A , BT B , CT C in einem Punkt (liegen T A , T B , T C auf einer Geraden). Das
ist die Winkelform des Satz von Ceva (Menealos).
Beweis (zur Ceva-Winkelform):
(die Seiten werden hier alle im Verhältnis τ A , τ B , τ C > 0 geteilt. Für äußere
Teilung verläuft der Beweis analog, ebenso wie der Beweis zur Winkelform des
Satzes von Menealos - dieser unterscheidet sich nur in der Voraussetzung).
Es gilt (mit x = ∠BT A A ):
sin α 1
sin x
=
sin α 2
sin(180 o −x)
BT A
c ;
=
TAC
b
Division beider Gleichungen liefert:
sin α 1
sin α 2
BT A
= θ A = bc ⋅ T
AC
= bc ⋅ τ A
Analog
folgen θ B = a ⋅ τ B und
⋅ τ C . Nach Voraussetzung ist
c
θ C = ab
θ A ⋅ θ B ⋅ θ C = 1,
also
b⋅c⋅a ⋅ τ A ⋅ τ B ⋅ τ C = 1. Da damit
c⋅a⋅b
M3
T2
T1
das Produkt der Seitenteilverhältnisse
1 ergibt, schneiden
M1
T3
sich
T2
M2
nach
Ceva
AT A , BT B , CT C
salen im Dreieck
in einem
M3
Mit Hilfe der beiden
Punkt.
Formen des Satzes
2.4.3.
T1
Anwendung auf
Transver-
M1
M2
T3
- 15 -
von Ceva lassen sich nun alle bekannten Sätze über die Ecktransversalen im
Dreieck beweisen.
Seitenhalbierende: Es ist offensichtlich τ A = τ B = τ C = 1
Winkelhalbierende: Hier ist θ A = θ B = θ C = 1, oder (nach 2.3.1.)
τ A = bc , τ B = ac , τ C = ba
Eine Innenwinkelhalbierende und zwei Aussenwinkelhalbierende schneiden sich
in einem Punkt.25 (dem Ankreismittelpunkt).
Mit den üblichen Bezeichnungen erhält man (mit 2.3.1.)
τ A = bc , τ B = − ac ,
τ C = − ba ,
bzw.
θB = −
C2
sin
sin 180 o −
(180−β)
2
= −1 , und analog
auch θ C = −1
Aus der Berechnung von θ B sieht man,
C1
C
θA = 1,
180 o −β
2
A2
das bei der Aussenwinkelhalbierenden das
A
B2
B
Sinusverhältnis gleich -1 ist. Damit kann
man auch noch mal (mit der Winkelform)
B1
A1
die beiden Sätze aus 2.3.1 beweisen:
Bei 1) gilt θ A = θ B = θ C = −1;
bei 2) gilt θ A = θ B = +1 ,
θ C = −1 .
C2
s
C1
C
r
A2
Höhen: (fürs spitzwinklige Drei-
s
P
A
r
B2
B
A'
t
eck; beim stumpfwinkligen analog)
τA =
t
h a ⋅tan(90 o −β)
h a⋅ tan(90 o −γ)
=
tan γ
tan β
analog
A1
τC =
tan β
tan α .
Mit der Winkelform: θ A =
B1
sin(90 o −β)
sin(90 o −γ)
=
cos β
cos γ ,
τB =
tan α
tan γ ,
θB =
cos γ
cos α ,
θC =
cos α
cos β
Auch 2.3.3. lässt sich mit der Winkelform des Satz von Menealos beweisen:
(mit α = ∗, β = o , γ = 180 o − (α + β) )
25
Das lässt sich natürlich auch (wie allgemein üblich) damit beweisen, das der Schnittpunkt z.B. der beiden
Außewinkelhalbierenden von allen Dreiecksseiten gleich weit entfernt ist und damit auch auf der halbierenden
des Innenwinkel liegen muss.
und
- 16 -
θA = −
sin γ
sin β
sin β
sin α
α
= − sin β , θ B = − sin(α+β)
= − sin
, θ C = − sin(β+γ) = − sin α
sin γ
sin(α+β)
sin β
2.4.4. Zwei weitere Folgerungen aus dem Satz von Monge
Aus den Beweisen in 2.3.2 lassen sich durch einfaches Umtauschen der Vorzeichens zwei weitere Beziehungen erhalten:
Bei drei Kreisen um M 1 , M 2 , M 3 mit den Radien r 1 , r 2 , r 3
1) -schneiden sich die drei Geraden durch einen Mittelpunkt und dem
Schnittpunkt der inneren Tangenten der beiden anderen Kreise
2) -wobei r 1 ≠ r 2 , r 1 ≠ r 3 , schneiden sich die Gerade durch M 1 und
dem Schnittpunkt der inneren Tangenten von K 2 , K 3 sowie die bei
den Geraden durch M 2 bzw. M 3 und dem Schnittpunkt der äußeren
Tangenten an die beiden anderen Kreise jeweils in einem Punkt.
Wie üblich teilen T 1 , T 2 , T 3 die Seiten [M 2 M 3 ] , [M 3 M 1 ] , [M 1 M 2 ] im
Verhältnis τ 1 , τ 2 , τ 3 .
Dann gilt bei 1)
τ1 =
τ2 =
τ3 =
r2
r3
r3
r1
r1
r2
- 17 -
und bei 2)
τ 1 = r 23
r
τ 2 = − r 31
r
τ 3 = − r 12
r
(Hier gibt es drei solcher Schnittpunkte, je nachdem wo man den inneren Tangentenschnittpunkt wählt.)
In beiden Fällen gilt wieder τ 1 ⋅ τ 2 ⋅ τ 3 = 1. Man beachte, wie hier 2.4.4. mit
2.3.2. über 2.4.1. zusammenhängt. (entspricht Fußnote 23):
Man wähle in 2.4.4. 1) den gemeinsamen Schnittpunkt als P in 2.4.1. Nach
2.3.2. 2) sind die Schnittpunkte einer Gegenseite mit der Geraden durch die
Schnittpunkte zweier innerer Tangenten gleich dem Schnittpunkt der anderen
äußeren Tangente. Nach 2.4.1. liegen die drei Möglichen Punkte auf einer Geraden, was auch Aussage von 2.3.2. 1) ist. Die Aussage 2.4.4. 2) ergibt sich dann
analog, wenn man den zweiten Satz in 2.4.1. anwendet.
2.4.5. Aufgabe 3 aus der 2. Runde des BWM 1996
Auf den Seiten eines Dreiecks ABC sind nach außen Rechtecke ABB 1 A 1 ,
BCC 1 B 2 , CAA 2 C 2 errichtet. Man beweise, daß sich die Mittelsenkrechten
der Strecken A 1 A 2 , B 1 B 2 , C 1 C 2 in einem gemeinsamen Punkt schneiden26.
Hier lässt sich Ceva nicht unmittelbar anwenden. Gleichwertig ist jedoch der
folgende Satz: Die Lote von A, B, C auf A 1 A 2 , B 1 B 2 , C 1 C 2 schneiden sich
in einem Punkt. Verschiebt man nämlich die Dreiecke ∆XX 1 X 2 (X ist A , B ,
oder C ) entlang ihrer Lote nach P, so dass jeweils X auf P zu liegen kommt,
setzen sich die drei verschobenen Dreiecke zu einem neuen zusammen; In diesem schneiden sich die Mittelsenkrechten in einem Punkt, und da Höhen || Mittelsenkrechten, gilt dies nach dem zurückschieben auch für die Ur-Dreiecke.
Es ist θ A =
sin ∠PAB
,
sin ∠CAP
und es gilt ∠PAB = 180 o − 90 o − ∠A 1AA
= 90 o − ∠A 1 AA
∠CAP = 90 − ∠A AA 2
mit sin(90 o − α) = cos α folgt:
o
26
nach http://www.bubis.com/muaddib/mathaufg.htm
- 18 Analog folgen θ B = r , θ C = s .
Da θ A ⋅ θ B ⋅ θ C = 1 ist der Satz bewiesen.
t
θ
r
C'
z
z
B
Hinweis: Der Beweis lässt sich genauso
A
x
durchführen, wenn man die Rechtecke nach
y
innen errichtet; auch dann gilt also der Satz.
A'
C
x
y
B'
Für die zweite Formulierung des Satzes soll
noch ein weiterer Beweis gegeben werden, der zwar ungleich aufwendiger ist
als der erste, der aber aufgrund der Verwendung komplexer Zahlen sehr interessant ist:
Man beachte dazu:
- Um a ∈ C um 90 o gegen den Uhrzeigersinn zu drehen, muss man a mit i
multiplizieren
B'
- Für eine Drehung um 90 o im Uhrzeigersinn multipliziert man a mit −i
Es sei a, b ∈ C und r, s, t ∈ R + (diese werden zum
bestimmen der Längen der Rechteckseiten verwendet).
y
y
B z
A'
x
x
Man erhält also:
C'
z
A
C
→
A 2 A 1 : t ⋅ i(a − b) − (−s ⋅ ia)
→
B 1 B 2 : r ⋅ ib − t ⋅ i(a − b)
→
C 2 C 1 : r ⋅ ib − (−s) ⋅ ia
Um nun die Richtungen der zu diesen "Vektoren"
senkrechten Geraden g 1 , g 2 , g 3 zu bestimmen, muss
man die Vektoren nur noch jeweils mit i multiplizieren. Die "Aufpunkte" sind dann 0, a, b . Man erhält also:
g 1 : z = i 2 (rb + sa) ⋅ λ 1
g 2 : z = a + i 2 (ta − tb + sa) ⋅ λ 2
g 3 : z = b + i 2 (rb − ta + tb) ⋅ λ 3
Korrekterweise müsste man nun für i 2 jeweils −1 setzen. Da man bei Rich-
tungsvektoren jedoch grundsätzlich auch den Gegenvektor verwenden kann,
kann man dass i 2 auch einfach weglassen. Da in den drei Geradengleichungen
die Komplexen Zahlen a, b "Vektorcharakter" haben, kann man sie auch tatsächlich als Basis von Vektoren im R 2 verwenden. (man macht praktisch eine
x
→→
). Die entsprechende Basis sei dann B = a , b
y
Abbildung x + iy →
Damit erhält man dann als neue Geradengleichungen:
- 19 →
T_BC
C
M_A
M_B
T_B
T_BA
T_A
T_C
A
T_AB
B
T_CB
T_CA
M_C
λ1 =
1
→
0
(Es ist a = und b = )
0 B
1 B
→
s
g1 : X = λ1 ⋅
r B
→ 1
s+t
g2 : X = + λ2 ⋅
0 B
−t B
→ 0
−t
g3 : X = + λ3
r+t B
1 B
Berechnen des Paramaters λ 1 für
g1 ∩ g2 :
I : sλ 1 = 1 + λ 2 (s + t)
II : rλ 1 = −tλ 2 , in I :
sλ 1 = 1 − rt λ 1 (s + t)
T_AC
umstellen liefert:
λ 1 (st + rs + rt) = t , also
t
rs+st+tr
Berechnen des Parameters λ 1 für g 1 ∩ g 3 :
I : sλ 1 = −tλ 3 in II : rλ 1 = 1 + λ 3 (r + t) liefert: rλ 1 = 1 − st λ 1 (r + t) ,
t
nach umstellen: λ 1 (rt + rs + ts) = t , also λ 1 = rs+st+tr .
Da für λ 1 beidemal der gleiche Wert resultiert, sind die Schnittpunkte identisch,
die Geraden schneiden sich in einem Punkt.
2.4.6. Satz vom Umkreistangentendreieck27(Gergonne-Punkt)
Für "zwischendurch" ein leicht zu beweisender Satz: Schneidet man die Tangenten durch die Eckpunkte an
C
B'
den Umkreis eines Dreiecks
paarweise, so schneiden sich die
A'
Eckpunkt und den Schnittpunkt
alpha2
A
drei Geraden durch jeweils einen
der beiden gegenüberliegenden
alpha1
omega
B
C'
Tangenten in einem Punkt.
In beiden Zeichnungen gelte
x = A C = A B , y = B A = B C,
z = C A = C B.
(Zeichnungen nächste Seite)
1. Spitzwinkliges Dreieck:
Die Teilverhältnisse werden hier auf ∆A B C bezogen. Dann gilt:
27
Dieser Satz ist ein Spezialfall des Satz von Steiner als auch des Satzes von Brianchon (vgl.:
http://www.math.nthu.edu.tw/gc/chuan/gc10/gc-10.html)
vgl. auch Anschauliche Geometrie 3, S.42, Aufgabe 16
- 20 -
τC =
y
x
τA =
τ B = xz , das Produkt ergibt 1.
z
y
Andere Formulierung des Satzes (bezogen auf ∆A B C ): Die Geraden durch
Eckpunkt und Inkreisberührpunkt der Gegenseite schneiden sich in einem
Punkt, dem Gergonne-Punkt.
2. Stumpfwinkliges Dreieck
Hier gilt, bezogen auf ∆A B C :
(Achtung: anderer Drehsinn!!!)
B'
C
A'
Q
y
τ C = − xy τ A = − z
τB =
z
x
Wieder ist das Produkt 1.
F
A
B
60.0 °
Die gleichwertige Formulierung lautet hier (für ∆A C B ): Die Geraden
durch einen Eckpunkt und den
Ankreisberührpunkt der Gegenseite
schneiden sich in einem Punkt. Da es
C'
drei Ankreise gibt, gibt es hier drei
solche Punkte.
Mit diesem Satz lässt sich zusammen mit 2.4.1. 1) auch Satz 2.3.3 beweisen.
Wählt man den Schnittpunkt als P (in 2.4.1.), so liegen jeweils die Schnittpunkte
AB ∩ A B usw. auf einer Geraden. Da A B die Tangente an C ist, ist das
genau die Aussage von 2.3.3.
2.4.7. Der Nagel-Punkt28
Ähnlich lässt sich auch folgender Satz beweisen:
Die Geraden durch Eckpunkt und Ankreisberührpunkt der Gegenseite schneiden sich in einem Punkt, dem Nagel-Punkt.
Es seien r A , r B , r C die Radien der Ankreise. Es gilt offensichtlich:
τ 1 ⋅ τ2 ⋅ τ3 =
28
AT C
TC
BT A
CT B
A
TBA
⋅
B T
⋅
C
Anschauliche Geometrie 3, S. 42 Aufgabe 17
- 21 Da Tangenten an einen Kreis jeweils gleich lang sind gilt: XT Y = XT YX , wobei
X ≠ Y, X, Y ∈ {A, B, C} .
Damit erhält man:
τ 1 ⋅ τ2 ⋅ τ3 =
AT C
AT BA
⋅
BT AB
TC B
⋅
AT C
⋅
B
TC
CT BC
TAC
=
BT AB
⋅
CT BC
T A C AT BA
rC r A rB
r B ⋅ rC ⋅ rA
=
=1
(X-Figur für innere Tangenten)
2.4.8. Satz vom Schnittpunkt der Geraden durch die Eckpunkte und die Spitzen der gleichschenkligen Dreiecke an der Gegenseite mit gleichen
Basiswinkeln
Satz: Errichtet man auf den
Seiten eines beliebigen DreiC
B'
A'
ecks jeweils gleichschenklige
Dreiecke mit gleichen Basiswinkeln nach aussen (oder
A
nach innen), so schneiden sich
B
die drei Geraden durch einen
Eckpunkt des Dreiecks und
C'
der Spitze des auf der Gegenseite errichteten gleichschenkligen
Dreiecks
Punkt29.
Beweis:
Es gilt:
(1)
(2)
sin α 1
AB
sin α 2
AC
=
sin(β+ω)
=
sin(γ+ω)
AA
und
AA
(Sinussatz in ∆ABA bzw. in ∆AA C )
29
Das gilt auch in dem Extremfall, dass A,B,C auf einer Gerade liegen (entartetes Dreieck)
in
einem
- 22 -
-i*a
i*b
0.5*(a-i*a)
B'
C=0
0.5*(b+i*b)
A'
a
b
b-a
A
B
0.5*( (b-a) -i*(b-a) )
-i*(b-a)
C'
Wegen A B = A C (Gleichschenkligkeit!)
erhält man durch Division beider Gleichungen (1)/(2): θ A =
Es folgt30 θ B =
sin(γ+ω)
sin(α+ω)
, θC =
sin(α+ω)
sin(β+ω)
sin α 1
sin α 2
=
sin(β+ω)
sin(γ+ω)
, und damit θ A ⋅ θ B ⋅ θ C = 1 .
Für den Fall, das eine der drei Geraden ausserhalb des Dreiecks verläuft (also
z.B. wenn α + ω > 180 o ) oder wenn die Dreiecke nach innen errichtet werden
(ω < 0 o ), laufen die Beweise analog.
Von diesem Satz sollen nun zwei Spezialfälle noch genauer vorgestellt werden:
2.4.8.1. Der Fermat-Punkt31
Es ist ω = 60 o . Der Schnittpunkt der drei Geraden heisst dann Fermat-Punkt
des Dreiecks. Dieser hat folgende Eigenschaften:
(1) AA = BB = CC 32
(2) der Winkel zwischen AA , BB , CC beträgt jeweils 60 o , also z.B.
∠AFB = 60 o
(3) Verlaufen alle drei Geraden innerhalb des Dreiecks (d.h., dass F innerhalb
des Dreiecks liegt), also wenn α, β, γ < 180 o − 60 o = 120 o so gilt für alle
Punkte P ≠ F , dass AP + BP + CP > AF + BF + CF
30
Man beachte: für
31
*
*G
=0o sind AA' usw. die Seitenhalbierenden, für
90o erhält man die Höhen
Schüler Duden - Die Mathematik I, Mannheim 19905 , Stichwort "Fermat-Punkt", S. 109
32
o
o
Das kann man auch so formulieren: Vergrößert man einen Dreieckswinkel um 60 (z.B. nach jeder Seite um 30 ),
wobei man die anliegenden Seiten beibehält, so sind die entstehenden dritten Seiten gleichlang. Siehe Anschauliche
Geometrie 4, Aufgabe S162/11
- 23 -
Beweise:
zu (1) und (2): Es ist AC = AB , AC = AB (Gleichseitige Dreiecke) und
∠CAC = ∠B AB = α + 60 o (ω = 60 o ). Aus dem SWS-Satz folgt damit
∆AC C ≅ ∆ABB , und ∆ABB geht aus ∆AC C durch eine 60 o -Drehung
um A hervor. Damit folgt sowohl CC = BB als auch ∠B FC = 60 o . Analog folgt auch CC = AA sowie die anderen Winkel.
zu (3)33: Man drehe F um A um 60 o nach links. Der Bildpunkt sei Q . Da
F ∈ CC ist Q ∈ BB (nach obigen Beweis).
Es ist also ∠QAF = 60 o , und wegen (2) auch ∠QFA = 60 o . Damit ist auch
∠FQA = 60 o , und ∆AFQ ist gleichseitig, also AF = FQ . Der Bildpunkt von
C bei der Drehung ist B . Aus den Eigenschaften einer Drehung folgt damit
CF = B Q .
Man erhält also AF + BF + CF = FQ + BF + B Q = BB . Wählt man einen
anderen Punkt P (anstatt F ) , so bleibt das Bild von C weiterhin B , aber P
und sein Bild P können nicht mehr gleichzeitig auf BB liegen. Da die Gerade
die kürzeste Verbindung zwischen zwei Punkten B, B ist, aber B, B , P, P
nicht mehr kollinear sind, ist der Satz bewiesen.
2.4.8.2. Interpretation bei gleichschenklig-rechtwinkligen Dreiecken mit dem
Satz von Aubel
Es ist ω = 45 o . Die Punkte A , B , C sind dann die Mittelpunkt der über den
Dreiecksseiten errichteten Quadrate. Dann schneiden sich AA , BB , CC in einem Punkt.
Beweis:
Nach dem Satz von Aubel (s.u.) gilt
AA ⊥ B C
BB ⊥ A C
CC ⊥ A B
also sind AA , BB , CC die Höhen von ∆A B C . Da sich die Höhen in einem Punkt schneiden, ist der Satz bewiesen.
33
Der gegeben Beweis entspricht einer Verallgemeinerung des in E. Quaisser, H.-J. Sprengel, "Geometrie in Ebene
und Raum", Thun; Frankfurt am Main 1989 (Deutsch Taschenbücher, Band 65) auf S. 50 gegebenen Beweises (für
ein gleichseitiges Dreieck ABC). Siehe auch Hinweis auf S. 55 dort
- 24 -
Beweis zum Satz von Aubel (Spezialfall):34
Zeichnet man über den Seiten eines Dreiecks die Aussenquadrate, so stehen die
Strecken, die die Mittelpunkte zweier Quadrate sowie einen Eckpunkt und den
Mittelpunkt des gegenüberliegenden Quadrats verbinden, senkrecht aufeinander
und sind gleichlang.
Man verwendet wieder die Komplexen Zahlen, also a, b ∈ C .
Unter Verwendung der Vektorschreibweise erhält man
→
→
B = 0.5 ⋅ (a − ia)
A = 0.5 ⋅ (b + ib) , also
→
B A = 0.5 ⋅ (b + ib − a + ia)
→
→
→
AC = 0.5 ⋅ ((b − a) − i(b − a)) ,
C = a + AC , also
→
C = 0.5 ⋅ (b + a − ib + ia) .
→
→
→
→
Da i ⋅ C = 0.5 ⋅ (ib + ia + b − a) = B A , geht B A aus C durch 90 o Drehung gegen den Uhrzeigersinn hervor, also CC ⊥ A B .
34
4
E. Barth, G. Krumbacher, F. Barth, "Anschauliche Analytische Geometrie", (Ehrenwirt Verlag) München 1995 ,
S. 72ff
- 23 -
3. Weitere Sätze aus der projektiven Geometrie
3.1. Der Satz von Desargues
Der Satz von Desargues ist wohl der bedeutendste Satz über Konvergenz bzw.
Kollinearität, da er beide Eigenschaften verknüpft. Er besagt:
Schneiden sich bei zwei Drei-
D=0
ecken ∆ABC , ∆A B C in
beliebiger Lage die drei Geraden AA , BB , CC in einem
Punkt D , so liegen die
C
B
A
S_C
S_A
S A = BC ∩ B C ,
S B = AC ∩ A C ,
S C = AB ∩ A B
B'
S_B
Schnittpunkte35
A'
auf einer Geraden. Der Satz
wird nun zuerst in dieser allge-
C'
meinen Form (in der Ebene)
bewiesen, später wird noch auf einige Besonderheiten und Spezialfälle
hingewiesen.
3.1.1. Analytischer Beweis36:
0
b
a
c=a+b
B
A
→ →
→
a , b , so dass a die Rich→ →
→
tung von A , b die Richtung von B und
→
→ → →
c = a + b die Richtung von C hat (D sei der
Man wählt eine Basis
Nullpunkt). Dies ist stets möglich, wie die Zeichnung
C
zeigt.
→ 0
1
und b = .
0
1
→
→ →
→
B =bb,
C = c c und
→
→
→
→
B =b b,
C =c c
→
Bezogen auf die gegebene Basis ist a =
Es gilt weiter:
35
36
→
→
A =aa,
→
→
A =a a,
Der Einfachheit halber werden in diesem Kapitel die Mengenklammern um die Schnittpunkte weggelassen
vgl.: Schneebeli, H.R., Geometrie von Fall zu Fall, Zürich 1991.S. 72-77 sowie die Lösungshinweise auf S. 80-83
Der hier dargestellte Beweis entspricht der Durchführung von Aufgabe 8 auf S. 73, wobei der Nachweis der
Kollinearität durch "Handrechnung" anstelle des Einsatzes eines Computeralgebraprogramms durchgeführt wird.
Auf die Wiedergabe des eleganteren Beweises auf S. 74f wurde bewußt verzichtet, da obiger Beweis gut
demonstriert, wie der Satz von Desargues auf rein schematische Weise hergeleitet werden kann.
- 24 Es wird nun zunächst S C = AB ∩ A B berechnet. Die anderen beiden Punkte
erhält man dann durch zyklisches vertauschen.
→
→
→ →
X = b b + λ ⋅ (a a − b b )
→
→
→
→
A B : X = b b + λ ⋅ (a a − b b )
AB :
Mit gleichsetzen37 erhält man durch Koeffizientenvergleich:
→
→
Für a :
und für b : II : b − λb = b − λ b
I : λa = λ a
a
Einsetzen von λ = λ ⋅ a in II liefert nach multiplizieren mit a :
a (b−b )
b
= a b−ab
II : a b − λa b = a b − λab , also λ = aa b−a
b−ab
→
→
→
Einsetzen in AB :
X = λa a + (b − λb) b liefert für S C :
→
→
→
1
S C = a b−ab
aa (b − b ) a + (a b 2 − abb − a b 2 + a bb ) b
→
→
1
aa (b − b ) a + (−bb )(a − a ) b
= a b−ab
durch zyklisches Vertauschen erhält man
→
SA =
→
SA =
1
b c−bc
1
b c−bc
→
→ → →
→
bb (c − c ) b + (−cc )(b − b ) c , mit c = a + b folgt
→
→
(−cc )(b − b ) a + (bb (c − c ) − cc (b − b )) b
sowie
→ → → →
aa (c − c )→
a
a
c , c = a + b , also
+
(−cc
)(a
−
)
→
→
1
(aa
(c
−
)
−
(a
−
))
+
(−cc
)(a
−
)
c
cc
a
a
a
b
a c−ac
→
→
Bezogen auf die Basis a , b erhält man:
→
SB =
→
SB =
1
a c−ac
→
SA =
−cc (b − b )
bb (c − c ) − cc (b − b )
→
aa (c − c ) − cc (a − a )
1
S B = a c−ac
−cc (a − a )
→
aa (b − b )
1
S C = a b−ab
−bb (a − a )
Zum Nachweis der Kollinearität muss man nach 2.2. nun α, β, γ so bestimmen,
1
b c−bc
→
→
→
→
dass α + β + γ = 0 und αS A + βS B + γS C = 0 . Im Gegensatz zu den vorigen Schritten, die rein schematisch ablaufen, liegt im Auffinden der drei Zahlen
nun die eigentliche Schwierigkeit. Man könnte als Kollinearitätskriterium natürlich auch 2.1. verwenden (das ebenfalls rein schematisch abläuft), doch sind
37
Der Einfachheit halber wird im Folgenden vorausgesetzt, dass alle Schnittpunkte existieren, also dass z.B. a'b-ab'
nicht Null ist. (Entartungsbedingungen)
- 25 -
dann die auftretenden Terme sehr lang. Dafür verwendet man dann besser den
Computer. Nach einigen Versuchen findet man jedoch:
α = (b c − bc )(a − a ) = ab c − abc − a b c + a bc
β = (a c − ac )(b − b) = a b c − ab c − a bc + abc
γ = (a b − ab )(c − c ) = a bc − ab c − a bc + ab c
also α + β + γ = 0 .
→
Für die a -Komponente erhält man außerdem:
−cc (a − a )(b − b ) + aa (b − b)(c − c ) − cc (a − a )(b − b) + aa (b − b )(c − c ) = 0
→
und für die b -Komponente:
bb (a − a )(c − c ) − cc (a − a )(b − b ) − cc (a − a )(b − b) − bb (a − a )(c − c ) = 0
→
→
→
→
also αS A + βS B + γS C = 0 , womit der Satz bewiesen ist:
3.1.2.
Beweis
im
Raum38
D
Die Punkte A, B, C
bzw. A , B , C liegen
C
A
in verschiedenen, nicht
E
B
S_C
S_A
B'
g
E'
S_B
Parallelen Ebenen E
bzw. E . Die Geraden
(X = A, B, C )
XX
schneiden sich in einem
A'
C'
Punkt D . Ist kein Geradenpaar XY , X Y parallel, so liegen die Punk-
g=E∩E .
te S Z auf der Geraden
Beweis:
Da X ∈ XD , Y ∈ YD sind X, X , Y, Y komplanar, und S Z = XY ∩ X Y
(Da die Geraden nach Vor. nicht parallel sind, existiert der Schnittpunkt auch)
Da XY ⊂ E , X Y ⊂ E , ist S Z ∈ E und S Z ∈ E , also S Z ∈ E ∩ E = g .
Also liegen die S Z auf g .
Mit der räumlichen Fassung kann man auch die ebene Fassung begründen:
Es liegen zunächst alle Punkte (wie in 3.1) in der Ebene E . Man errichtet in D
auf E das Lot und wählt auf ihm, im Abstand h von E , den Punkt D 2 . Die
Geraden DX = DX sind dann die senkrechten Projektionen von D 2 X auf
E . Errichtet man nun die Lote in X (auf E ), so schneiden diese D 2 X in X 2 .
Die Punkte A , B , C und A 2 , B 2 , C 2 (in E ) bilden dann mit D 2 eine
38
Schüler Duden, Die Mathematik I, Stichwort "Desargues, Satz von", S. 59f
E. Quaisser, H.-J. Sprengel, "Geometrie in Ebene und Raum", S.15ff
- 26 räumliche Desargueskonfiguration. Da die Schnittpunkte von der Gerade X 2 Y 2
bzw. ihrer senkrechten Projektion XY mit X Y übereinstimmen (XY und
X Y liegen in E und haben einen Schnittpunkt. Da X 2 Y 2 beide Geraden
schneidet, mit E aber nur einen gemeinsamen Punkt haben kann, müssen sich
alle drei Geraden in einem Punkt schneiden39), wobei wegen der räumlichen Fassung des Satz von Desargues die Schnittpunkte X 2 Y 2 ∩X Y auf einer Geraden liegen, gilt das also auch für die Schnittpunkte XY ∩ X Y .
3.1.3. Spezialfälle und verschiedene Realisierungen
Falls nicht alle Schnittpunkte XY ∩ X Y existieren, so spricht man von "entarteten Desargues-Konfigurationen40". Es sei hier bloß auf folgende hingewiesen:
- sind AB A B und BC B C so gilt auch AC A C . Das folgt auch
sofort aus den Eigenschaften der V-Figur
gilt nur AB A B , so ist AB auch zu S A S B
-
parallel.
D
Beweis: Menealos in ∆A C D, Gerade AS B :
→
A SB
→
SB C
A
B
⋅
→
DA
→
AA
=1
→
DB
→
BB
=1
Menealos in ∆B C D , Gerade BS A :
C
S_A
⋅
→
CC
→
CD
→
B SA
→
SA C
S_B
C'
⋅
→
CC
→
CD
⋅
Da AB A B folgt (V-Figur):
A'
B'
A SB
SB C
=
B SA
SAC
- Es kann auch vorkommen, dass
S_C
S_A
DB
BB
SAS B .
B
C
=
Aus den beiden Gleichungen folgt somit auch
, und damit (X-Figur) A B
A
DA
AA
D nicht existiert, nämlich wenn
AA BB CC . Man kann
sich diese Form dadurch entstan-
S_B
C'
den denken, dass man in 3.1. die
B'
A'
Punkte A , B , C , C, S A , S B
beibehält, während man D auf
der Gerade CC immer weiter
"ins unendliche" bewegt. Es er-
gibt sich dann jeweils A = DA ∩ CS B , B = DB ∩ CS A , wobei A, B gegen den Schnittpunkt der Parallelen zu CC durch A bzw. B konvergieren.
39
40
vgl. auch E. Quaisser, H.-J. Sprengel, "Geometrie in Ebene und Raum", S.13, Satz (1.13)
siehe Literatur wie bei
38
- 27 Da die Punkte S A , S B , S C dabei stets kollinear sind, kann man das dann auch
für den Grenzfall der Parallelität annehmen.
Hier gilt auch eine Kehrform: Sind S A , S B , S C kollinear, und CC BB , so ist
auch AA BB : ∆S B CC und ∆S C BB bilden Desargues-Konfiguration:
S B S C ∩ CB ∩ C B = S A . Da hier CC BB gilt nach vorherigen Satz
auch
AA BB , mit A = S B C ∩ S C B ,
A = S BC ∩ SC B
- Als letzter, sehr bedeutender Spezialfall sei genannt, wenn A , B , C auf
den (verlängerten) Seiten von ∆ABC liegen: In dieser Form wurde der Satz
von Desargues schon in
D=0
2.4.1. bewiesen und benutzt: Die Dreiecke ∆ABC
C
und ∆T A T B T C bilden
B
A
dort
offensichtlich
eine
Desargues-Konfiguration
B'
A'
(die Geraden XT X
schneiden sich in P ), weswegen S A , S B , S C kollinear
C'
sind!
Noch ein letzter Hinweis:
Bilden ∆ABC und ∆A B C eine Desargues-Konfiguration, so trifft dies offensichtlich auch auf z.B. ∆A BC und ∆AB C zu. Je nachdem, welchen der
Punkte X oder X auf der Geraden DX man zum "ersten" Dreieck rechnet, erhält man
23
2
= 4 verschiedene Geraden. (Der Faktor
1
2
kommt daher, weil es
egal ist, ob man drei Punkte nun zum ersten oder zweiten Dreieck rechnet).
3.1.4. Beweis des Kehrsatzes über die Dualform
Sätze aus der projektiven Geometrie haben die Eigenschaft, das es zu ihnen
stets auch eine "duale Form" gibt. Diese entsteht aus dem ursprünglichen Satz
dadurch, wenn man jeweils die Begriffe "Punkt - Gerade", "schneiden - verbinden", "liegt auf - geht durch" jeweils vertauscht. Auf die tieferen Gründe soll
hier nicht eingegangen werden, doch es hängt damit zusammen, das bereits die
Axiome der projektiven Geometrie bezüglich dieser Begriffe identisch sind
(Bsp.: "Durch zwei Punkte geht genau eine Gerade" - "Zwei Geraden schneiden
sich in genau einem Punkt)41. Eine weitere Begründung für diesen Sachverhalt
41
Schüler Duden - Die Mathematik I: Stichwort "projektive Geometrie" S. 362f
- 28 -
ist die Tatsache, das sich die entsprechenden Operationen wie z.B. schneiden
zweier Geraden bzw. verbinden zweier Punkte durch dieselben Gleichungen beschreiben lassen42. Mit dieser Methode soll im Folgenden auch gearbeitet
werden.
Dualform des Satz von Desargues (Kehrsatz):
zwei Dreiecken ∆ABC , ∆A B C
die Schnittpunkte
S C = AB ∩ A B , S A = BC ∩ B C , S B = AC ∩ A C auf einer Geraden,
so schneiden sich AA , BB , CC in einem Punkt.
Liegen
bei
Zum Beweis werden nun jeweils entsprechende Aussagen aus Satz und Kehrsatz nebeneinandergeschrieben. Aus der Gültigkeit des Satzes ergibt sich dann
die Gültigkeit des Kehrsatzes. O.B.d.A. kann man als Gerade auf der die 3
Schnittpunkte liegen die x- Achse wählen. (Zeichnung: siehe 3.1)
Dualform von Desargues
Satz von Desargues
Die Punkte S A , S B , S C
Die Geraden AA , BB , CC
haben die Koordinaten
haben die Geradengleichungen
(x 1 , 0), (x 2 , 0), (x 3 , 0)
y = x 1 x, y = x 2 x, y = x 3 x
Die entsprechenden Geraden
Die entsprechenden Punkte
S A B, S B C, S C A haben die
Gleichungen y = m i (x − x i )
und entsprechend S A B , S B C , S C A
die Gleichung y = m i (x − x i )
A, B, C haben die
Koordinaten (m i , x i m i )
und entsprechend A , B , C
die Koordinaten (m i , x i m i )
Schneiden von S A B ∩ S B C = C
Verbinden von A und B : c = AB
∆y
y = m c x + b c , Steigung m c = ∆x
m 1 (x C − x 1 ) = m 2 (x C − x 2 )
m x −m x
x C = 1m11−m 22 2
yC = m1xC − m1x1
mc =
offensichtlich gilt: x C = m c
m 1 x 1 −m 2 x 2
m 1 −m 2
b c = y A − m c x A = m 1 x 1 − mc m 1
= m1x1 − xCm1
offensichtlich gilt: y C = −b c
Damit erhält man also: Dem Punkt (x C , y C ) im Kehrsatz entspricht die Gerade
y = x C x − y C im Satz. Die Beziehung gilt für die Punkte A, B, C, A , B , C
im Kehrsatz und die Geraden a, b, c, a , b , c im Satz, wie man durch zyklisches Vertauschen allgemein einsieht.
Verbinden von A, A : AA
schneiden von a ∩ a = S A
Schüler Duden - Die Mathematik II: Stichwort "Dualitätsprinzip" S. 85f
Meyers Kleine Enzyklopädie Mathematik, S. 596, ab "Dualitätsprinzip"
42
das sieht man z.B. auch an der Dualität des Kollinearitäts- / Konvergenzkriteriums aus 2.1
- 29 Steigung α A =
y A −y A
x A −x A
(x A x S A − y A ) = (x A x S A − y A )
y −y A
x S A = x AA −x A
es gilt also α A = x S A
mit y = α A x + β A erhält man
mit y S A = x A x S A − y A
β A = y A − α Ax A
folgt y S A = x A α A − y A
also gilt β A = −y S A
Die Geraden AA : y = α A x + β A usw. im Kehrsatz entsprechen also den
Punkten S A (α A , −β A ) usw. im Satz. Die drei Geraden AA , BB , CC (im
Kehrsatz) schneiden sich genau dann in einem Punkt, wenn das Konvergenzkri-
1 αA βA
terium aus 2.1. erfüllt ist, also wenn 1 α B β B = 0 . Da der Satz von Des1 αC βC
argues jedoch gilt, also S A , S B , S C das Kollinearitätskriterium aus 2.1. erfüllen,
1 α A −β A
gilt 1 α B −β B = 0 . Da der Betrag des Wertes einer Determinante durch
1 α C −β C
Änderung aller Vorzeichen einer Spalte nicht geändert wird, ist also auch das
Konvergenzkriterium erfüllt. Aus der Gültigkeit des Satz von Desargues folgt
somit die Gültigkeit des Kehrsatzes.
Der Kehrsatz lässt sich zum Glück aber auch ohne diese aufwendige Rechnung
beweisen, die hauptsächlich das Phänomen der Dualität veranschaulichen sollte:
(Zeichnung wie 3.1.)
∆S B AA und ∆S A BB bilden eine Desargues Konfiguration: Da S A , S B , S C
kollinear gilt S B S A ∩ AB ∩ A B = S C . Nach Desargues sind damit
C = S B A ∩ S A B , C = S B A ∩ S A B , AA ∩ BB kollinear.
Gleichbedeutend damit ist
P3
(Einleitung!),
das
sich
AA , BB , CC in einem
Punkt schneiden.
P2
S1
P1
3.2.
p
0
S2
S3
q
Q1
Q2
Q3
Der
Satz
von
Pappos43
Auf zwei Geraden p, q
seien jeweils drei Punkte
P 1 , P2 , P 3
Q 1 , Q 2 , Q 3 gewählt. Dann sind die Schnittpunkte (falls sie existieren)
43
vgl.: Schneebeli, H.R., Geometrie von Fall zu Fall, Zürich 1991.S. 68-71 sowie die Lösungshinweise auf S.78-80
und
- 30 -
S 1 = P2 Q 3 ∩ P3 Q 2 ,
S 2 = P1 Q 3 ∩ P3 Q 1 ,
S 3 = P1 Q 2 ∩ P2 Q 1
der kreuzweisen Verbindungsgeraden kollinear.
3.2.1. Beweis
Im Folgenden sei die Einschränkung gemacht, das p und q nicht parallel sind.
Der Satz gilt allerdings auch für p q (siehe 3.2.2.). Wie im Beweis zum Satz
von Desargues sei auch hier wieder gefordert, das alle Schnittpunkte auch existieren, das also auftretende Nenner von Null verschieden sind. O.B.d.A. sei der
Schnittpunkt p ∩ q der Nullpunkt. Damit erhält man als Geradengleichungen
→
→
→
→
p : X = λ p und q : X = σ q .
→ →
Bezogen auf die Basis
p, q
→
pi
und
0
erhält man damit P i =
→ 0
Q i = . Zur Berechnung von S 3 = P1 Q 2 ∩ P2 Q 2 kann man das Er qi
gebnis
für
aus
3.1.1.
verwenden.
Man
erhielt
dort
SC
→
SC =
1
a b−ab
aa (b − b )
.
−bb (a − a )
Durch
zyklisches
Vertauschen
→ →
→ →
a , b , a, a , b, b → p , q , p 1 , p 2 , q 2 , q 1
erhält
→
p 1 p 2 (q 2 − q 1 )
p 1 p 2 (q 1 − q 2 )
1
1
S 3 = p 2 q 2−p
= p 1 q 1−p 2 q 2
.
1q1
−q 1 q 2 (p 1 − p 2 )
q 1 q 2 (p 1 − p 2 )
Analog folgt:
→
S1 =
1
p 2 q 2 −p 3 q 3
1
p 3 q 3 −p 1 q 1
→
1
S 3 = p 1q 1 −p
2q 2
→
S2 =
p 2 p 3 (q 2 − q 3 )
q 2 q 3 (p 2 − p 3 )
p 3 p 1 (q 3 − q 1 )
q 3 q 1 (p 3 − p 1 )
p 1 p 2 (q 1 − q 2 )
q 1 q 2 (p 1 − p 2 )
→
→
von
man
→
Man sucht nun wieder α, β, γ mit α + β + γ = 0 und αS 1 + βS 2 + γS 3 = 0 .
Mit
α = (p 2 q 2 − p 3 q 3 )p 1 q 1
β = (p 3 q 3 − p 1 q 1 )p 2 q 2
γ = (p 1 q 1 − p 2 q 2 )p 3 q 3
sind beide Bedingungen erfüllt: Die erste sieht man sofort ein, für die zweite erhält man:
→
p -Komponente: p 1 p 2 p 3 (q 1 q 2 − q 1 q 3 + q 2 q 3 − q 1 q 2 + q 1 q 3 − q 2 q 3 ) = 0
→
q -Komponente: q 1 q 2 q 3 (p 1 p 2 − p 1 p 3 + p 2 p 3 − p 1 p 2 + p 1 p 3 − p 2 p 3 ) = 0
Damit ist nach 2.2. die Kollinearität von S 1 , S 2 , S 3 nachgewiesen.
- 31 -
P1
P2
P3
Q1
q
Q2
p
Q3
P3
P1
S2
X
P2
p
Z
q
Y
S1
Q1
Q2
Q3
P1
P2
P3
Q1
Q2
Q3
- 32 -
3.2.2. Spezialfälle44, Realisierungen
Ein Spezialfall, nämlich das die Gerade durch den Schnittpunkt von p und q
geht, wurde schon in 2.4.1.
besprochen
P2
P3
(vgl.
Fußnote
24).
Interessanter ist der Fall, das
P1
p q . Auch dann gilt der
p
Q3
0
Q2
Q1
q
Satz von Pappos, was jedoch
nicht direkt aus dem Beweis
bei 3.2.1. hervorgeht, wo ein
Schnittpunkt gefordert wurde.
Man kann sich das so überlegen, das ein Schnittpunkt p ∩ q existiert, wenn
man q mit allen Punkten festhält und von p z.B. P 1 festhält und von P 2 /P 3
nur die x-Koordinate beibehält. Solange die Steigung von p größer/kleiner als
die von q ist, existiert der Schnittpunkt p ∩ q , und nach dem Beweis aus 3.2.1.
liegen die drei untersuchten Punkte auf einer Gerade. Mit einem Grenzprozess
analog dem in 3.1.3 beim Satz von Desargues kann man nun die Steigung m p
von oben und unten gegen m q konvergieren lassen. Damit konvergieren auch
P 2 /P 3 und die Schnittpunkte Pi Q j ∩ P j Q i . Da sie stets auf einer Geraden
liegen, wird das dann auch im Grenzfall zutreffen.
Eine weitere Spezial- form ist:
Gilt P 1 Q 2 P 2 Q 1 , so
gilt auch S 2 S 1 P 1 Q 2 .
s2
S
s3
Nach Pappos sind
T
p1
X = P1 Q 3 ∩ P3 Q 2 ,
Y = P2 Q 3 ∩ Q 1 P 3 ,
Z = P1 Q 1 ∩ P 2 Q 2
p2
V
P
p3
Beweis:
s1
q3
q2
q1
kollinear.
Damit bilden die Dreiecke
∆XP 1 Q 2 und ∆YQ 1 P 2
Q
eine Desargues-Konfiguration,
denn
XY ∩ P1 Q 1 ∩ P 2 Q 2 = Z . Da P1 Q 2 Q 1 P2 ist nach 3.1.3. auch die Gerade
44
Schneebeli, H.R., Geometrie von Fall zu Fall, Zürich 1991.S. 71
Schüler Duden - Die Mathematik II: Stichwort "Pappos, Satz von", S304
- 33 durch XQ 2 ∩ YP 2 = S 1 und XP 1 ∩ YQ 1 = S 2 dazu parallel, also auch
S 2 S 1 P 1 Q 2 . (auch hier gilt der Satz falls p q )
Am leichtesten einzusehen ist folgender Spezialfall:
Aus P 1 Q 2 P 2 Q 1 und
P 1 Q 3 P3 Q 1 folgt auch
P2 Q 3 P 3 Q 2 . Das folgt sofort aus der V-Fi-
gur. Wieder gilt der Satz auch für p||q (das lässt sich über Parallelogramme
beweisen).
So wie beim Satz vom Desargues gibt es auch hier bei sechs gegebenen Punkten
mehrere Möglichkeiten, diese entsprechend zu verbinden, und damit auch verC
B
A
P2
P1
P3
P4
P6
P5
schiedene Geraden zu erhalten. Behält man die Reihenfolge der Punkte auf q
fest, permutiert jedoch die Punkte P 1 , P 2 , P 3 , so erhält man also 3! = 6 verschiedene Verbindungsmöglichkeiten und ebenso viele Pappos-Geraden.
3.2.3. Dualform des Satz von Pappos
Wie beim Satz von Desargues gibt es auch hier eine Dualform. Sie lautet:
Gehen durch zwei Punkte P , Q jeweils drei Geraden p 1 , p 2 , p 3 bzw.
P5
P2
P3
P1
A
P3
P1
B
C
A
P4
P6
P2
B
C
P4
P6
P5
q 1 , q 2 , q 3 , dann schneiden sich die Geraden durch die kreuzweisen Schnittpunkte, nämlich
s 1 durch p 2 ∩ q 3 und p 3 ∩ q 2
s 2 durch p 1 ∩ q 3 und p 3 ∩ q 1
- 34 sowie s 3 durch p 1 ∩ q 2 und p 2 ∩ q 1
in einem Punkt.
Man könnte diesen Satz ähnlich wie die Dualform bei Desargues beweisen.
Aufgrund des großen Aufwands soll hier jedoch nur der einfacherere Beweis,
der direkt über Pappos geht, angeführt werden.
Bei Betrachtung der Zeichnung erkennt man, das nach Pappos T, V, S kollinear
sind. Da jedoch s 1 = TV und S = s 2 ∩ s 3 folgt damit S ∈ s 1 , weshalb sich
s 1 , s 2 , s 3 in S schneiden.
B
Damit entspricht die Aussa-
C
A
P1= P2
ge der Dualform gleich der
Aussage
P3
des
Satz
von
Pappos45.
P6
P4
P5
3.3.
Der
Satz
von
Pascal und verwandte
Sätze
Satz von Pascal: Liegen die Eckpunkte P 1 , P 2 , P 3 , P 4 , P 5 , P 6 eines
Sechsecks
auf einem Kegelschnitt, handelt es sich also um ein Sehnensechseck, so
liegen die Schnittpunkte (falls sie existieren)
E'
A = P1 P2 ∩ P4 P5
B = P2 P3 ∩ P5 P6
C = P3 P4 ∩ P6 P1
Spitze S
Kegel K
gegenüberliegender Seiten auf einer Geraden (der "Pascal-Geraden").
m
E
Abweichend vom bisherigen Vorgehen soll zuerst auf einige Besonderheiten hingewiesen
h
werden, bevor der Satz bewiesen wird. So
wird an die Reihenfolge der sechs Punkte kei-
ne Anforderung gestellt - sie kann beliebig umgeändert werden. Damit erhält
man zu sechs festen Punkten
45
(6−1)!
2
= 60 verschiedene Möglichkeiten der
Meyers Kleine Enzyklopädie Mathematik, S. 597, Abb. 25.4-4
- 35 Numerierung46, und ebenso viele Pascal-Geraden (das (6 − 1)! kommt aus der
1
Formel für Ringpermutationen, der Faktor 2 ist nötig, da es egal ist, ob man ein
Sechseck im oder gegen den Uhrzeigersinn angibt)47.
Für die rechte Zeichnung kann man sich das auch mit dem Satz von Desargues
veranschaulichen. Bezogen auf das konvexe Sechseck P 1 P 2 P 3 P 6 P 5 P 4 liegen
nämlich
die
Schnittpunkte
der
gegenüberliegenden
Seiten,
also
P 1 P 2 ∩ P5 P6 = AP1 ∩ BP6,
P 2 P 3 ∩ P4 P5 = AP4 ∩ BP3,
P 1 P 4 ∩ P3 P6 auf einer Geraden. Damit bilden die ∆AP 1 P 4 und ∆BP 6 P 3
eine
Desargues-Konfiguration
(bzgl.
des
Kehrsatzes)
weswegen
sich
AB, P1 P6 , P 4 P 3 in einem Punkt C schneiden - also sind A, B, C kollinear.
Doch damit nicht genug. Die sechs Punkte müssen nicht verschieden sein, sondern es können auch zwei Punkte identisch sein, so dass aus einer Sehne im
Grenzfall eine Tangente wird. Damit ist auch 2.3.3. ein Spezialfall des Satzes
von Pascal (dort besteht eine Ecke des Dreiecks also jeweils aus zwei Punkten
eines Sehnensechsecks). Setzt man z.B. P 1 = P 2 , so erhält man einen Satz über
das Sehnenfünfeck48. Analog lassen sich so auch Sätze über das Sehnenviereck
bilden (siehe in 3.3.4.).
Bis jetzt wurden alle Aussagen nur auf einen besonderen Kegelschnitt, nämlich
auf Kreise bezogen. Tatsächlich können die sechs Punkte jedoch auf einem beliebigen Kegelschnitt49, also auch auf einer Ellipse, Parabel oder Hyperbel (und
im Grenzfall der Hyperbel sogar auf einem Geradenpaar (Satz von Pappos), siehe 3.3.2) liegen. Man kann sich das folgendermaßen erklären: Der Satz sei beispielsweise gültig, falls die sechs Punkte auf einem Kreis liegen. Liegen die
Punkte nun z.B. auf einer Parabel, so kommt diese ja dadurch zustande, das ein
(gerader) Kegel von einer Ebene E , die parallel zu genau einer Mantellinie m
ist, geschnitten wird. Ferner stehe E senkrecht auf der Höhe h . Durch eine Zentralprojektion50 durch die Kegelspitze S kann nun E auf E abgebildet werden.
Die Punkte P 1 , ..., P 6 , A , B , C in E gehen dabei auf die Punkte
P 1 , ...P6 , A, B, C in E über, die Parabel wird auf einen Kreis abgebildet (da
E ⊥ h ). Da die Zentralprojektion geradentreu ist, und nach Vor. der Satz am
46
Schneebeli, H.R., Geometrie von Fall zu Fall, Zürich 1991.S. 89ff: Ausschnitt aus Math Monthly 76, 1969,
pp 895-905: Cerrutti,E. /Davis.: FORMAC meets Pappus
47
linke Zeichnung aus:
Gottwald, S., Meyers kleine Enzyklopädie Mathematik, Zürich 199514, S.604;
Gascha H., Compact Handbuch Mathematik, München 1992, S. 296
48
49
50
vgl. auch:
http://www.math.nthu.edu.tw/gc/chuan/gc10/gc-10.html
Schüler Duden - Die Mathematik I: Stichwort "Kegelschnitte", S.205f
Schüler Duden - Die Mathematik I: Stichwort "projektive Abbildung", S. 359ff
- 36 Kreis gelte, sind mit A, B, C auch A , B , C kollinear. Damit gilt der Satz für
beliebige Kegelschnitte.
3.3.1. Beweis
Bevor der Satz bewiesen wird, soll nun noch überlegt werden, an welchem Kegelschnitt der Beweis zu führen ist (nach obigen Ausführungen genügt es ja, den
Satz an einem der möglichen Kegelschnitte Kreis (bzw. Ellipse), Parabel und
Hyperbel zu beweisen). Oberflächlich betrachtet wird man mit dem vertrauten
Kreis sympathisieren, doch seine vermeintlich einfache Form erweist sich als
Trugschluß51: Bei der Koordinatenrechnung hätte man mit Ausdrücken wie
y = ± r 2 − x 2 bzw. x = r cos ϕ, y = r sin ϕ
zu tun. Mit diesen zu rech-
nen ist außerordentlich schwierig. Am einfachsten lässt sich ein Analytischer Beweis an der Normalpararabel führen (da alle Parabeln ähnlich sind, genügt das
auch). Die sechs Punkte auf dem Kegelschnitt haben dann die Koordinaten
(x i /x 2i ) . Als Planfigur dient die Zeichnung aus 3.3; Das dort die Punkte auf einem Kreis liegen soll nicht weiter stören. Man berechnet nun also zunächst die
Punkte A, B, C und wendet zum Nachweis der Kollinearität dann (2.2) an.
Analytischer Beweis: Berechnung von A = P 1 P 2 ∩ P 4 P 5 :
P1P2 : y =
x 22 −x 21
x 2 −x 1 (x
x 3 −x 1 x 2 +x 2 x 2 −x 3
− x 1 ) + x 21 = (x 1 + x 2 )x + 1 x 22−x 11 1
x x (x −x )
= (x 1 + x 2 )x + 1 x22−x1 1 2
= (x 1 + x 2 )x − x 1 x 2
Analog folgt:
gleichsetzen und umstellen liefert
P 4 P 5 : y = (x 4 + x 5 )x − x 4 x 5
x(x 1 + x 2 − x 4 − x 5 ) = x 1 x 2 − x 4 x 5 , also
x 1 x 2 −x 4 x 5
, einsetzen in P 1 P 2
x A = x 1 +x
2 −x 4 −x 5
(x 1 +x 2 )(x 1 x 2 −x 4 x 5 )−x 1 x 2 (x 1 +x 2 −x 4 −x 5 )
yA =
x 1 +x 2 −x 4 −x 5
Dabei heben sich (x 1 + x 2 )x 1 x 2 und −x 1 x 2 (x 1 + x 2 ) auf, übrig bleibt somit
x x (x +x )−x x (x +x )
y A = 1 2 x41+x52−x 44−x5 5 1 2
Für B = P 2 P 3 ∩ P 5 P 6 und C = P 3 P 4 ∩ P 6 P 1 erhält man die entsprechenden Koordinaten durch zykl. Vertauschen. Es gilt also52:
→
A =
51
1
x 1 +x 2 −x 4 −x 5
x1x2 − x4x 5
x 1 x 2 (x 4 + x 5 ) − x 4 x 5 (x 1 + x 2 )
vgl. auch Schneebeli, H.R., Geometrie von Fall zu Fall, Zürich 1991.S. 89ff: Ausschnitt aus Math Monthly 76, 1969,
pp 900, Abschnitt 5: Cerrutti,E. /Davis.: FORMAC meets Pappus
52
Der Einfachheit halber sei auch hier wieder gefordert, dass alle Schnittpunkte existieren und damit alle Nenner
ungleich Null sind (Nicht-Entartungsbedingungen)
- 37 -
→
B =
1
x 2 +x 3 −x 5 −x 6
→
1
C = x 3 +x 4−x
1 −x 6
x2x3 − x5x 6
x 2 x 3 (x 5 + x 6 ) − x 5 x 6 (x 2 + x 3 )
x3x4 − x1x 6
x 3 x 4 (x 1 + x 6 ) − x 1 x 6 (x 3 + x 4 )
Man benötigt zum Nachweis der Kollinearität nun drei Zahlen α, β, γ mit
→ → → →
α A + β B + γ C = 0 und α + β + γ = 0 . Die Suche nach diesen Zahlen
stellt wieder die hauptsächliche Anforderung bei dieser Art des Beweisens dar.
Mit viel Geduld findet man schließlich:
α = (x 1 + x 2 − x 4 − x 5 )(x 3 − x 6 ) = x 1 x 3 − x 1 x 6 + x 2 x 3 − x 2 x 6
−x 3 x 4 + x 4 x 6 − x 3 x 5 + x 5 x 6
β = (x 2 + x 3 − x 5 − x 6 )(x 4 − x 1 ) = x 2 x 4 − x 1 x 2 + x 3 x 4 − x 1 x 3
P5
P1
p
p'
p
r
r'
p'
A
q
−x 4 x 5 + x 1 x 5 − x 4 x 6 + x 1 x 6
γ = (x 3 + x 4 − x 1 − x 6 )(x 5 − x 2 ) =
P3
r
C
q'
r'
B
−x 1 x 5 + x 1 x 2 − x 5 x 6 + x 2 x 6
q'
Durch Vergleichen aller Zeilen be-
q
P4
P6
stätigt man α + β + γ = 0 .
Für die x-Komponente erhält man:
P2
→
A : (x 1 x 2 − x 4 x 5 )(x 3 − x 6 ) = x 1 x
→
B : (x 2 x 3 − x 5 x 6 )(x 4 − x 1 ) = x 2 x
→
C : (x 3 x 4 − x 1 x 6 )(x 5 − x 2 ) = x 3 x 4 x 5 − x 2 x 3 x 4 − x 1 x 5 x 6 + x 1 x 2 x 6
Schließlich fehlt noch die etwas aufwendige y-Komponente:
→
A : (x 1 x 2 x 4 + x 1 x 2 x 5 − x 1 x 4 x 5 − x 2 x 4 x 5 )(x 3 − x 6 ) =
x 1x 2x 3x 4 + x 1x 2 x3 x5 − x1 x3 x4 x 5 − x 2x 3x 4x 5
−x 1 x 2 x 4 x 6 − x 1 x 2 x 5 x 6 + x 1 x 4 x 5 x 6 + x 2 x 4 x 5 x 6
→
B : (x 2 x 3 x 5 + x 2 x 3 x 6 − x 2 x 5 x 6 − x 3 x 5 x 6 )(x 4 − x 1 ) =
x 2x 3 x4 x5 + x2 x3 x4 x 6 − x 2x 4x 5x 6 − x 3x 4 x5 x6
−x 1 x 2 x 3 x 5 − x 1 x 2 x 3 x 6 + x 1 x 2 x 5 x 6 + x 1 x 3 x 5 x 6
→
C : (x 1 x 3 x 4 + x 3 x 4 x 6 − x 1 x 3 x 6 − x 1 x 4 x 6 )(x 5 − x 2 ) =
x 1x 3x 4x 5 + x 3x 4 x5 x6 − x1 x3 x5 x 6 − x 1x 4x 5x 6
−x 1 x 2 x 3 x 4 − x 2 x 3 x 4 x 6 + x 1 x 2 x 3 x 6 + x 1 x 2 x 4 x 6
Beide Komponenten addieren sich jeweils zu Null, womit der Satz bewiesen ist.
Dieser Beweis ist relativ aufwendig, besonders das Vergleichen der einzelnen
Summanden am Schluß ist sehr mühsam. Der Vorteil ist allerdings, das der
- 38 -
Beweis keine bestimmte Reihenfolge
C
der Punkte verlangt, womit alle 60
r'
Möglichkeiten
r'
p'
P'
der
Numerierung
praktisch auf einmal erfasst werden.
Bei einem (anschaulicheren) geomeP
p'
q'
trischen Beweis53 muss man prinzipi-
q'
B
A
ell noch argumentieren, ob er sich auf
alle 60 Möglichkeiten übertragen
lässt. Als Beispiel sei hier für zwei Spezialfälle der Numerierung der Satz trigonometrisch, mit Hilfe der Winkelform des Satz von Ceva bewiesen.
C
B
A
r'
r
P2
p'
p
P1
p'
q
q
P6
P3
p
q'
P4
q'
P5
trigonometrischer Beweis:
(der gestrichene Winkel ist jeweils der kleinere) .
Aufgrund der Faßkreisbogeneigenschaft erhält man jeweils gleiche Winkel p ( )
bzw. q ( ) . (Die Gleichheit der r muss noch gezeigt werden.) Man wendet nun
die Ceva-Winkelform zuerst auf ∆P 1 P 4 C an. Da sich P 1 A, P 4 A, CA in A
schneiden gilt also:
sin p
sin(p−p )
sin q
sin r
⋅ sin(q−q ) ⋅ sin(r−r
= 1 (*)
)
Falls sich nun die Geraden AC, P 5 P 6 , P 2 P 3 ebenfalls schneiden so wäre mit
B = P2 P3 ∩ P5 P6 also auch B ∈ AC und der Satz bewiesen. Damit sich die
Geraden schneiden,
müsste nach der Winkelform bezogen auf ∆CP 6 P 3 gelten:
53
z.B. in Anschauliche Geometrie 3, S. 52 (vgl. auch 2.3.3)
- 39 sin r
sin(r−r )
sin q
sin p
⋅ sin(q−q ) ⋅ sin(p−p ) = 1 , was jedoch genau die Aussage von (*) ist. Die
Aussage scheint fast trivial, weil die Dreiecke ∆P 1 P 4 C und ∆P 3 P 6 C ja ähnlich sind (www) und man deshalb vermuten
P5
könnte, das daraus folgt , das sich die 3 Gera-
P4
p
den beidemal schneiden, doch das ist nicht
r
q
der Grund: Man beachte nämlich, das die FiP3
P6
r'
p
P1
q
P2
guren P 1 P 4 CA und P 3 P 6 CB NICHT ähnlich sind, denn in ∆P 1 P 4 C ist der Winkel q
an der Seite angetragen, die dem Winkel p
gegenüberliegt; Im Dreieck ∆P 3 P 6 C dagegen ist q an der Seite angetragen, die dem
Winkel r gegenüberliegt! (Nur deswegen
C
muss man überhaupt auf die Ceva-WinkelB
form zurückgreifen, sonst ergäbe sich der
Sachverhalt
Z
5
allein
aus
Ähnlichkeitseigenschaften!).
4
6
Bezogen auf ein Dreieck kann man das so
Y
3
1
2
formulieren: Trägt man an die Seiten
[AB], [BC], [CA] jeweils die Winkel
p , q , r an, wobei der erste Punkt der
Scheitel ist, und schneiden sich die so ent-
X
standenen Geraden in einem Punkt P , so
schneiden sich die Geraden auch dann in ei-
nem Punkt P , wenn man die Winkel
p , r , q jeweils an [AC], [CB], [BA] anbringt. (Aufgrund der Eigenschaften
der Ceva-Winkelform können die Winkel dabei auch negativ sein)
Dieser Beweis lässt sich auch auf andere Numerierungen übertragen:
P 1 , p → P 3 , p : Komplementärwinkel beim Faßkreis überP 4 P 6
P 1 , p → P3 , p : p = 180 0 − ∠P 4 P 3 P 2 (Sehnenviereck P 1 P 4 P 3 P 2)
P 6 , q → P 4 , q : Faßkreis über P 1 P 3
P 6 , q → P4 , q : q = 180 o − ∠P 5 P 4 P 3 (Sehnenviereck P6 P5 P4 P3)
Der restliche Beweis läuft wie bei der ersten Numerierung, wobei allerdings
q < 0 ist.
Es soll noch erwähnt werden, das auch der Kehrsatz gilt54 (der hier jedoch nicht
bewiesen werden kann): Wenn die Schnittpunkte gegenüberliegender Seiten
54
Schüler Duden - Die Mathematik II: Stichwort "Pascal, Satz von", S. 311f
- 40 -
des Sechsecks auf einer Geraden liegen, dann liegen die Eckpunkte des Sechsecks auf einem Kegelschnitt.
G23
t2
G12
3.3.2. Spezialfälle
t3
Wie bei Desargues/Pappos gibt
t1
es auch beim Satz von Pascal ei-
G34
nige entartete Konfigurationen.
G16
t4
t6
genauer vorgestellt werden:
a)
G56
t5
Zwei dieser Spezialfälle sollen
Gilt
P 1 P 2 //P 4 P 5
und
P2 P3 //P 5 P 6 so ist
auch P 3 P 4 //P 1 P 6
G45
Beweis:
G23
t2
G12
t4
t1
G34
G16
t6
t3
t5
G45
(Z-Winkel:
P2, p → P5, p
P 1 P 2 //P 4 P 5)
(Z-Winkel:
P2, q → P5, q
P 2 P 3 //P 5 P 6)
r = 180 o − (p + q) = r (Sehnenvierecke P 1 P 2 P 3 P 4 bzw.
P 1 P 4 P 5 P 6)
=> P 3 P 4 //P 1 P 6 (Z-Winkel)
G56
b) Gilt nur 12//45 , so ist auch
BC//12 (mit
B = 23 ∩ 56, C = 34 ∩ 16 )
Beweis:
Mit einer anderen Numerierung liegen nach Pascal auch X = 23 ∩ 16 ,
Y = 14 ∩ 25 , Z = 34 ∩ 56 auf einer Geraden (vgl. 3.3.). Damit bilden
∆Z54 und ∆X21 eine
Desargues - Konfiguration, denn ZX ∩ 52 ∩ 41 = Y . Da 12//45 ist nach einer entarteten Desargues Form (vgl. 3.1.3.) auch die Gerade durch die Schnittpunkte C = Z4 ∩ X1 und B = Z5 ∩ X2 zu 12 parallel, also BC//12 .
Schließlich soll noch gezeigt werden, wie man aus dem Satz von Pascal den
Satz von Pappos gewinnen kann: Wie in 3.3. gezeigt wurde, gilt der Satz von
- 41 -
Pascal auch für Hyperbeln, die die Gleichung
x2
a2
y2
− b 2 = 1 haben55. Ihre Asym-
ptoten haben die Gleichungen y = ± a . Behält man nun das Verhältnis a bei,
lässt jedoch a → 0 laufen, so bleiben die Asymptotengeraden gleich, aber die
b
b
Hyperbelpunkte konvergieren dabei gegen die Geradenpunkte. Da der Satz von
Pascal auch für noch so kleines a gilt, gilt er auch für den Grenzfall, das die
Punkte des Sechsecks auf den Asymptotengeraden liegen.
3.3.3. Dualform: Der Satz von Brianchon56
Wie zu allen Sätzen der projektiven Geometrie gibt es auch beim Satz von
Pascal eine Dualform. Im Gegensatz zur Dualform von Pappos/Desargues liefert diese aber eine wirklich "neue" Aussage:
Satz von Brianchon: Die Geraden durch je zwei gegenüberliegende Ecken eines
Tangentensechsecks an einen beliebigen Kegelschnitts schneiden sich in einem
Punkt.
Für diesen Satz gibt es ähnliche Besonderheiten wie beim Satz von Pascal (z.B.
gibt es auch hier je nach Numerierung der Tangentenberührpunkte 60 verschiedene Schnittpunkte usw.).
Der Beweis wird ähnlich wie bei der Dualform des Satz von Desargues geführt,
wobei man als Kegelschnitt wieder die Normalparabel verwendet:
Satz von Brianchon
Satz von Pascal
Gleichung der Tangente t i im
2
Punkt (x i , x i ) :
Koordinaten der Eckpunkte:
1
(Parabel y = − 4 x 2 )
t i : y = 2x i (x − x i ) + x 2i
= 2x i x − x 2i
=: m i x + b i
Schnittpunkt: G 12 = t 1 ∩ t 2
m 1x + b 1 = m 2x + b 2
b −b
x 12 = m21 −m12
b −b
y = m 1 m 21−m12 + b 1
m b −m b +m b −m b
= 1 2 1m 11−m12 1 2 1
m b −m b
= 1m21 −m22 1
b 2 −b 1 m 1 b 2 −m 2 b 1
also G 12 ( m 1 −m 2 , m 1 −m 2 )
55
56
P i (2x i , − x 2i )
P i (m i , b i )
Gerade g 12 = P 1 P 2
∆y
Steigung a 12 = ∆x
b −b
a 12 = m22 −m11
b −b
y = m22 −m11 (x − m 1 ) + b 1
b −b
m b −m b −m b +m b
= m22−m11 x − 1 2 1m12 −m21 1 1 1
b −b
m b −m b
= m22−m11 x − 1m22−m 21 1
Schüler Duden - Die Mathematik I: Stichwort "Hyperbel" S181ff
Schüler Duden - Die Mathematik II: Stichwort "Brianchon, Satz von", S. 64
- 42 -
=: G 12 (x 12 , y 12 )
Für die Gerade r := G 12 G 45
g 12 : y = −x 12 x + y 12
Schnittpunkt R = g 12 ∩ g 45
−x 12 x + y 12 = −x 45 x + y 45
y −y
x = x 4545 −x 1212
y −y
y = −x 12 x 4545−x 1212 + y 12
−x y +x y +x y −x y
= 12 45 12x 4512−x 1245 12 12 12
x y −x y
= 45x 1245−x 1212 45
R(m r , b r )
S = g 23 ∩ g 56 , T = g 34 ∩ g 61
erhält man durch ähnliche Rechnung
r: y=
y 45 −y 12
x 45 −x 12 x
−
x 12 y 45 −x 45 y 12
x 45 −x 12
r : y = mr x + br
Für s = G 23 G 56 und t = G 34 ∩ G 61
gilt analog
sD
t : y = mt x + bt
S(m s , b s ) ,
T(m t , b t )
Die Geraden r, s, t schneiden sich
Da nach Pascal R, S, T kollinear
R
C
Q
genau dann in einem Punkt wenn
S
B
gilt
P
gilt
T
A
1 mr br
1 ms bs
1 mt bt
= 0 (nach 2.1)
Aus der Gültigkeit des Satzes von Pascal folgt also die Gültigkeit des Satzes
von Brianchon.
Hinweis: Damit ist auch 2.4.6. (sowohl 1. als auch 2. ) ein Spezialfall des Satzes
von Brianchon, wobei jeweils 2 benachbarte Tangentenberührpunkte
gegeneinandergelaufen sind: A CB AC B ist ein Tangentensechseck,
und damit schneiden sich A A , CC , B B in einem Punkt.
3.3.4. Anwendung auf Tangenten- bzw. Sehnenvierecke
Auch auf Sehnen- bzw. TangentenR
D
C
Pascal bzw. Brianchon anwenden,
V
Q
S
B
P
A
vierecke lassen sich der Satz von
wenn man jeweils zweimal zwei
Punkte "zusammenlaufen" lässt. Da
vier Punkte, die auf einem Kreis liegen, als Eckpunke ein Sehnenviereck
bestimmen, als Tangentenberührpunkte jedoch auch ein Tangentenviereck,
- 43 -
lassen sich hier sowohl Pascal als auch Brianchon anwenden. Die beiden durch
die vier Kreispunkte festgelegten Vierecke werden dabei im Folgenden als korrespondierend bezeichnet. Das Sehnenviereck hat dabei die Ecken P, Q, R, S
und das Tangentenviereck die Ecken A, B, C, D , wobei P ∈ AB , Q ∈ BC ,
R ∈ CD und S ∈ DA ist. Mit der Gerade PP wird die Tangente an den Kreis
im Punkt P , also die Gerade AB bezeichnet.
3.3.4.1. Schnittpunkt der Geraden durch die Berührpunkte und der Diagonale
im Tangentenviereck57
Satz: Die Geraden BD, PS, RQ schneiden sich in einem Punkt T .
Analog schneiden sich AC, PQ, RS in einem Punkt U .
Der Beweis wird hier zunächst elementar mit dem Satz von Menealos geführt.
Ein Beweis über den Satz von Pascal folgt dann im nächsten Abschnitt.
Es sei BD ∩ RQ = T und
BD ∩ PS = T
Nach Menealos in ∆DCB , Gerade RQ gilt:
DR
RC
⋅
CQ
QB
BT
⋅ − TD
= −1
Nach
Menealos
in
∆DAB , Gerade SP
M
gilt:
N
R
C
D
DS
SA
⋅ AP
⋅ − BT = −1
PB T D
Q
Aufgrund gleich langer
V
S
B
P
Tangentenabschnitte
gilt außerdem:
DS = DR ,
RC = CQ ,
QB = PB
A
und
SA = AP . Damit erhält man nach gleichsetzen der beiden oberen Gleichungen:
BT
TD
=
BT
TD
, also T = T .
Das sich auch AC, PQ, RS in einem Punkt schneiden, lässt sich genauso beweisen, oder man wendet Desargues auf ∆PBQ und ∆SDR an: Da
PS ∩ BD ∩ QR = T liegen nach Desargues PB ∩ SD = A , PQ ∩ SR ,
57
vgl. BWM 1984, 2. Runde, Aufgabe 4
- 44 -
BQ ∩ DR = C auf einer Geraden, also schneiden sich AC, PQ, RS in einem
Punkt.
3.3.4.2. Diagonalschnittpunkt des Sehnen-/Tangentenvierecks58
Satz:
T
M
U
N
C
R
D
Q
V
S
B
P
A
Die Diagonalen AC, BD des Tangentenvierecks und die Diagonalen PR, QS
des Sehnenvierecks schneiden sich in einem Punkt V .
a) Beweis mit Brianchon
RDAPBC bilden ein Tangentensechseck.
=> RP, DB, AC schneiden sich in einem
Punkt.
Auch SABQCD ist ein Tangentensechseck
=> SQ, AC, BD schneiden sich in einem
Punkt.
Da beidemal die Geraden durch AC ∩ BD gehen, gehen alle vier Geraden
durch diesen Punkt.
b) Beweis mit Pascal
RRPSSQ ist ein Sehnenviereck => RR ∩ SS = D , RP ∩ SQ
und PS ∩ QR = T (vgl. 3.3.4.1) sind kollinear.
PPSQQR ist ein Sehnenviereck => PP ∩ QQ = B , PS ∩ QR = T
und SQ ∩ RP sind kollinear.
58
entspricht 3.3.4.1., wenn man dort z.B. P und Q vertauscht (andere Numerierung der Berührpunkte)
- 45 Damit sind B, D, T, RP ∩ SQ kollinear, womit auch 3.3.4.1 nochmal bewiesen
ist. Da sich also BD, RP, SQ in einem Punkt schneiden, und durch analoge
Rechnung sich auch AC, RP, SQ in einem Punkt schneiden, gehen also alle vier
Geraden durch diesen Punkt.
c) Beweis mit Menealos
Es sei SQ ∩ DB = V
und PR ∩ DB = V
Menealos in ∆DBM , Gerade SQ :
DV
VB
A
F
P1
P2
Menealos in ∆DBN , Gerade PR :
DV
B
VB
P3
P6
BQ
⋅ QM ⋅ MS
=1
SD
BP NR
⋅ PN
⋅ RD = 1
Gleichsetzen unter Beachtung von
C
P4
BQ = BP, QM = MS, S
P5
E
(gleich lange Tangentenabschnitte)
D
DV
VB
=
DV
VB
liefert:
, also V = V .
Damit schneiden sich DB, SQ, PR in einem Punkt. Auch hier kann man ähnlich
zeigen, dass sich auch AC, SQ, PR in einem Punkt schneiden.
3.3.4.3. Kollinearität der Schnittpunkte gegenüberliegender Seiten des Sehnen-/
Tangentenvierecks
Satz: Die Schnittpunkte der gegenüberliegenden Seiten des
Tangentenvierecks,
AB ∩ CD = N , BC ∩ DA = M , und die Schnittpunkte der
gegenüberliegenden Seiten des Sehnenvierecks, PQ ∩ RS = U ,
QR ∩ SP = T sind kollinear.
Der Beweis59 wird wieder auf zwei Arten geführt:
59
Auch hier könnte man den Beweis mit Menealos führen (Dreiecke
=> M,T,N kollinear;
Dreiecke
MAN/MCN, Geraden PS/QR
MDN/MBN, Geraden RS/PQ => M,U,N kollinear)
- 46 -
a) Beweis mit Desargues
Da DB ∩ SQ ∩ RP = V bilden ∆DSR und ∆BQP eine Desargues- Konfiguration. Damit sind DS ∩ BQ = M , DR ∩ BP = N , SR ∩ QP = U kollinear.
Auch ∆CRQ und ∆APS (CA ∩ RP ∩ QS = V ) bilden eine Desargues- Konfiguration. Also sind auch CR ∩ AP = N , CQ ∩ AS = M , RQ ∩ PS = T
kollinear. Also liegen M, N, U, T auf einer Geraden.
b) Beweis mit Pascal
RRSPPQ ist ein Sehnensechseck
=> RR ∩ PP = N , RS ∩ PQ = U , SP ∩ QR = T sind kollinear
SSPQQR ist ein Sehnensechseck
=> SS ∩ QQ = M , SP ∩ QR = T , PQ ∩ RS = U sind kollinear
Also sind M, N, U, T kollinear.
3.3.5. Der Satz von Steiner60 an zwei Spezialfällen
Der Satz von Steiner besagt, das von den 60 möglichen Pascal - Geraden eines
Sehnensechsecks jeweils 3 durch einen Punkt gehen, d.h. es gibt 20 solcher
Punkte. Das kann hier nicht allgemein bewiesen werden, aber es sollen zwei der
möglichen 20 Punkte genauer untersucht werden.
3.3.5.1. Äußeres Tangentensechseck aus dem Sehnensechseck bzw. inneres
Sehnensechseck aus dem Tangentensechseck61
a) Schneidet man jeweils eine Seite eines Sehnensechsecks mit der übernächsten
(Zeichnung) so bestimmen die sechs Schnittpunkte ein weiteres Sechseck. In
diesem schneiden sich die Geraden durch gegenüberliegende Eckpunkte in einem Punkt, womit es sich nach dem Kehrsatz von Brianchon um ein Tangentensechseck handelt. (Je nach Numerierung erhält man versch. Schnittpunkte).
Bew.: Nach Pascal liegen die Schnittpunkte gegenüberliegender Seiten,
AC ∩ FD
CE ∩ FB
EA ∩ BD
auf einer Geraden.
Damit bilden ∆ACE und ∆DFB eine Desargues - Konfiguration (bzgl. des
Kehrsatzes), also schneiden sich AD, CF, EB in einem Punkt.
60
vgl. auch Schneebeli, H.R., Geometrie von Fall zu Fall, Zürich 1991.S. 89: Ausschnitt aus Math Monthly 76, 1969,
pp 900, Abschnitt 5: Cerrutti,E. /Davis.: FORMAC meets Pappus
http://www.astro.virginia.edu/~eww6n/math/PascalLines.html
61
lässt man hier jeweils zwei benachbarte Punkte zusammenlaufen, so entspricht der Satz 2.4.6.
- 47 -
b) Schneidet man in einem Tangentensechseck jeweils zwei Geraden durch einen Eckpunkt und den übernächsten Eckpunkt (Zeichnung), so liegen in dem
entstehenden Sechseck die Schnittpunkte gegenüberliegender Seiten auf einer
Geraden, es handelt sich also nach Pascal um ein Sehnensechseck.
Der Beweis läuft analog: Im Tangentensechseck schneiden sich AD, CF, BE in
einem Punkt, und nach Desargues liegen dann die Schnittpunkte
P 1 P 2 ∩ P4 P5 , P 2 P 3 ∩ P 5 P 6, P 3 P 4 ∩ P 6 P 1 auf einer Geraden.
Hinweis: Auch wenn bei a) z.B. von einem Kreis (besonderer Kegelschnitt) ausgegangen wird, muss es sich bei dem entstehenden Tangentensechseck nicht
notwendig um Tangenten an einen Kreis handeln (es können auch Tangenten an
einen anderen Kegelschnitt sein).
- 46 -
3.3.5.2. Inneres Tangentensechseck aus dem Sehnensechseck bzw. äußeres
Sehnensechseck aus dem Tangentensechseck
a) Schneidet man in einem Sehnensechseck die
Geraden durch Eckpunkt und übernächsten
Punkt (Zeichnung), so entsteht ein Sechseck, bei
dem sich die Geraden durch gegenüberliegende
Punkte in einem Punkt schneiden.
A
U
g
B
W
X
Y
C
Z
Der Beweis ist etwas schwieriger:
Nach Pascal sind
X, Y, Z kollinear.
Nach Pappos am Geradenpaar g, h
mit A, U, B ∈ g und C, V, D ∈ h
sind auch
W, Y, Z kollinear,
also sind X, W, Y, Z kollinear.
V
h
D
A
M
U
X
g
B
W
T
Z
C
N
Nach Pappos mit A, M, U ∈ g
und C, N, V ∈ h sind aber auch
X, W, T kollinear,
also sind auch
X, T, Z kollinear
Da T = MV ∩ NU
ist das
gleichbedeutend damit, dass sich
XZ, MV, NU in einem Punkt
schneiden.
V
h
D
b) Schneidet man in einem Tangentensechseck jeweils eine Seite mit der
übernächsten, so entsteht ein Sehnensechseck P 1 P 2 P 3 P 4 P 5 P 6, d.h.
P 1 P 2 ∩ P4 P5 , P 2 P 3 ∩ P 5 P 6, P3 P4 ∩ P6 P1 liegen auf einer Geraden (in
der Zeichnung mit F, C, T bezeichnet).
Der Beweis läuft wieder über den Satz von Pappos
- 47 Nach
schneiden
Brianchon
sich
AD, BE, CF in M ,
also M ∈ FC (*)
P4
P2
E
D
H
F
M
T
Nach
Pappos
mit
P4 , E, D und P 1 , A, B
auf zwei Geraden sind
P6
F, H, M kollinear,
wegen
(*) also
C
H ∈ FC 62
P3
Mit Pappos auf die
Punkte P 4 , D, P 6 bzw.
P1
angewandt
P1 , B, P 3
P5
sind auch H, T, C
kollinear,
also T ∈ HF = FC . Damit sind die Punkte F, T, C kollinear.
Mit den vier Sätzen aus 3.3.5. lässt sich somit von jedem Sehnensechseck nach
aussen bzw. innen ein Tangentensechseck errichten und umgekehrt. Mit dem
neu entstandenen Sechseck kann man dann genauso verfahren, so das immer
neue Sehnen- bzw. Tangentensechsecke entstehen.
B
A
4. Anhang - Der Chordalschnittpunkt63
Zuguterletzt soll noch ein interessanter Satz vorgestellt werden, der jedoch von
der Beweismehtode her nicht in die anderen beiden großen Abschnitte passt.
Die Chordale ist dabei der geometrische Ort aller Punkte, welche an zwei
gegebene Kreise gleich lange Tangentenabschnitte besitzen.
Es sei nun M 1 (0; 0) und
P
M 2 (a; 0) . Für alle Punkte P der
Chordale gilt dann offensichtlich:
2
2
M 1 P − r 21 = M 2 P − r 22
Nach Definition der Chordale
müssten linke Seite und rechte
r1
Seite der Gleichung positiv sein,
M2
M1
damit eine Tangente vom Punkt P
aus überhaupt existiert, d.h. P darf
nicht innerhalb einem der Kreise
liegen. Verallgemeinernd wird im
folgendem als Chordale die Menge
aller Punkte verstanden, die die
Gleichung oben erfüllen (also auch wenn keine Tangente existiert).
r2
62
Das folgt bei anderer Numerierung auch direkt aus Brianchon (vgl. 3.3.3., zweite Zeichnung)
63
Schüler Duden "Die Mathematik I", Stichwort "Chordale" S. 50f
- 48 Dann erhält man für P(x; y) :
x 2 + y 2 − r 21 = (x − a) 2 + y 2 − r 22
−r 21 = −2ax + a 2 − r 22
Das wichtige Ergebnis ist an dieser Rechnung nur dass x = const. , d.h. bei der
Chordale handelt es sich um eine Gerade. Da offensichtlich für die gemeinsamen
Schnittpunkte der Kreise (falls sie existieren), beide Seiten der
Ausgangsgleichung 0 ergeben, geht die Chordale also durch die beiden
gemeinsamen Punkte zweier Kreise.
Es gilt nun folgender Satz: Bei drei Kreisen schneiden sich die Chordalen zu je
zwei Kreisen in einem Punkt, dem Chordalpunkt C .
c3
K3
c2
c1
Es sei c 1 die Chordale von K 2 /K 3
c 2 die Chordale von K 1 /K 3
c 3 die Chordale von K 1 /K 2
Ferner seien die Funktionen
2
K1
C
K2
t i : P → t i (P) = M i P − r 2i
für i = 1, 2, 3 definiert.
Es sei C = c 1 ∩ c 2 , also gilt
t 2 (C) = t 3 (C) da C ∈ c 1 und
t 1 (C) = t 3 (C) da C ∈ t 2 . Also
gilt auch t 1 (C) = t 2 (C) und damit
Also
gilt
C ∈ c3 .
c 1 ∩ c 2 ∩ c 3 = C.
Solange sich die Kreise paarweise schneiden, gibt es zu diesem Satz auch einen
überraschend einfachen räumlichen Beweis64:
1. Fall: Die drei Kreise haben einen gemeinsamen inneren Punkt.
Man betrachte dann die Kugeln um die Punkte M i mit den Radien r i . Da die
drei Kreise einen inneren Punkt haben, schneiden sich die drei Kugeln in zwei
Punkten Q 1 und Q 2 , wobei Q 1 Q 2 senkrecht auf der Ebene steht. Zwei Kugeln
schneiden sich jeweils in einem Kreis, der eine Ebene festlegt, die senkrecht auf
der Zeichenebene steht, und deren Schnitt mit der Zeichenebene die Chordale an
die betreffenden Kreise ergibt. Da Q 1 Q 2 in jeder dieser drei Ebenen liegt, liegt
auch der Schnittpunkt mit der Zeichenebene auf jeder der drei Chordalen, die
sich somit in einem Punkt schneiden.
2. Fall: Die drei Kreise haben keinen inneren
Punkt.
In diesem Fall wählt man die dritte Kugel so, das
ihr Schnitt mit der Zeichenebene K 3 ergibt, und
außerdem einen Punkt Q 1 des Schnittkreises der
beiden anderen Kugeln enthält65. Damit enthält sie
auch einen zweiten Punkt Q 2 des Schnittkreises
64
vgl. auch E. Quaisser, H.-J. Sprengel, "Geometrie in Ebene und Raum", S.52f
65
Da jeder Tetraeder eine Umkugel besitzt, ist das stets möglich
- 49 wobei , Q 1 Q 2 diesmal zwar nicht senkrecht auf der Zeichenebene steht, aber
der Schnitt mit ihr gibt wieder den Chordalpunkt.
Literaturverzeichnis
Schneebeli, H.R., Geometrie von Fall zu Fall, Zürich 1991
Clemens Thaer, Die Elemente von Euklid, Thun; Frankfurt am Main 19973
Gottwald, S., Meyers kleine Enzyklopädie Mathematik, Zürich 199514
Gascha H., Compact Handbuch Mathematik, München 1992
Schüler Duden - Die Mathematik I, Mannheim 19905
Schüler Duden - Die Mathematik II, Mannheim 19905
Friedrich Barth, Gert Krumbacher, Elisabeth Matschiner, Anschauliche
Geometrie 3, München 19881
Friedrich Barth, Gert Krumbacher, Elisabeth Matschiner, Anschauliche
Geometrie 4
E. Barth, G. Krumbacher, F. Barth, Anschauliche Analytische Geometrie,
(Ehrenwirt Verlag) München 19954
E. Quaisser, H.-J. Sprengel, Geometrie in Ebene und Raum, Thun; Frankfurt
am Main 1989 (Deutsch Taschenbücher, Band 65)
http://www.bubis.com/muaddib/mathaufg.htm
http://www.math.nthu.edu.tw/gc/chuan/gc10/gc-10.html
http://www.astro.virginia.edu/~eww6n/math/PascalLines.html
- 50 -
Erklärung:
"Ich erkläre hiermit, dass ich die Facharbeit ohne fremde Hilfe angefertigt und
nur die im Literaturverzeichnis aufgeführten Quellen und Hilfsmittel benützt
habe."
......................................, den.....................
Ort
Datum
.....................................................................
Unterschrift des Kollegiaten