Die Maxwell`gleichungen (zeitabhängige Felder)
Werbung
")
Kapitel 4
Die Maxwell’gleichungen
(zeitabhängige Felder)
Bisher sah es so aus, als wären elektrische und magnetische Felder unabhängig voneinander. Die einzige Verbindung zwischen ihnen bestand darin, dass ein elektrischer Strom ein Magnetfeld produziert. Dies ist aber nicht
mehr der Fall, wenn wir es mit zeitabhängigen Feldern zu tun haben.
4.1
Das Faraday’sche Induktionsgesetz
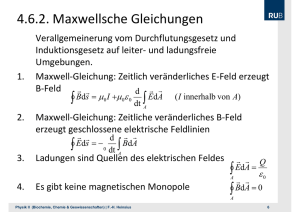
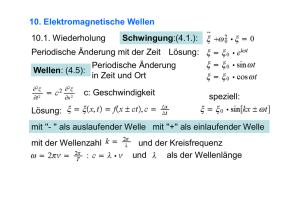
Faraday machte 1831 die Beobachtung, dass in dem Kreis c dann ein Strom fließt, wenn er den Stabmagneten
bewegte. Er hielt die Änderung des magnetischen Flusses F für die Ursache des Stromes. Durch die Änderung
von F wird entlang
des Kreises c ein elektrisches Feld ~ε induziert, dessen Linienintegral U die elektromotorische
H
Kraft ist: U = c ~εd~r.
A
I
c
B
Magnet
v
Abb. 4.1:
Nach dem Ohm’schen Gesetz bewirkt U einen Strom. Der magnetische Fluss F ist nur von der Randkurve c
abhängig:
F :=
I I
~ · ~ndf =
B
S
I I
~ · ~ndf =
rot A
S
I
~ r
Ad~
C
Faraday beobachtete:
U∼
dF
;
dt
d.h. U = −k ·
dF
dt
Die induzierte elektromotorische Kraft U ist der zeitlichen Änderung des magnetischen Flusses proportional.
Die Proportionalitätskonstante k hängt nur von dem gewählten Einheitensystem ab und ist im Gauß’schen
k = 1c , was im Folgenden gezeigt wird.
63
~
Das Minuszeichen kommt von der Lenz’schen Regel, wonach der induzierte Strom der Änderung des B-Feldes
entgegenwirkt.
Vor der Entwicklung der speziellen Relativitätstheorie nahm man an, dass alle physikalischen Gesetze unter der
Galilei-Transformation (~r0 = ~r + t · ~v ; t = t0 ) invariant sein sollten. Die gestrichenen Größen sind die Größen
des bewegten Systems. Für Faraday’s Experiment bedeutet dies, dass, egal ob er den Draht festhält und den
Magneten bewegt oder umgekehrt den Magneten festhält und den Draht bewegt, im Leiter ein Strom induziert
werden müsste, was mit der Beobachtung übereinstimmt.
Wenn wir einen Draht bewegen und den Magneten festhalten, ergibt sich als Konsequenz der Galilei’schen
Invarianz für das Induktionsgesetz:
I
~ε0 d~r = −k ·
C
d
dt
I I
~ · ~ndf
B
S
ε0 ist die Feldstärke für dasjenige System, in welchem der Draht in Ruhe ist. Die induzierte elektromotorische
Kraft ist der totalen Zeitableitung des magnetischen Flusses proportional; wobei die totale Zeitablenkung auch
Veränderungen der Lage der Schleife berücksichtigt:
∂
∂x ∂
∂y ∂
∂z ∂
∂
d
~
=
+
·
+
·
+
·
=
+ (~v · ∇)
dt
∂t
∂t ∂x
∂t ∂y
∂t ∂z
∂t
Das Induktionsgesetz in der obigen Form ist eine weitreichende Verallgemeinerung des Faraday’schen Gesetzes,
denn C kann nun ein beliebiger geschlossener Weg im Raum sein, der nicht notwendig entlang eines elektrischen
Leiters gehen muss. Mit dem Induktionsgesetz haben wir eine Verbindung des elektrischen Feldes ~ε mit dem
~ erhalten.
Magnetfeld B
Es gelten folgende Relationen:
d
dt
I I
~ · ~ndf
B
=
S
=
=
I I
~
∂B
~ B
~ · ~ndf
· ~ndf +
(~v · ∇)
S
S ∂t
I I
I I
I I
~
∂B
~
~
~ · B)
~ ~ndf
· ~ndf +
∇ × (B × ~v ) · ~ndf +
~v (∇
S ∂t
S
S
I
I I
~
∂B
~ × ~v ) d~r
· ~ndf + (B
C
S ∂t
I I
Einsetzen in das Induktionsgesetz ergibt:
I
~
∂B
· ~ndf − k ·
S ∂t
I I
~
∂B
= −k ·
· ~ndf
S ∂t
I I
~ε0 d~` = −k ·
C
I ~ d~r
~ε0 − k · (~v × B)
C
I
~ × ~v ) d~r
(B
C
Dies ist die äquivalente Formulierung des Faraday’schen Gesetzes für einen bewegten Draht. Das Faraday’sche
Gesetz für einen ruhenden Draht lautet:
I
~εd~r = −k
C
I I
S
~
∂B
· ~ndf
∂t
0
Daraus ergibt sich für das elektrische Feld ~ε in einem bewegten System:
~
~ε0 = ~ε + k · (~v × B)
Eine bezüglich des Drahtes ruhende Ladung q erfährt bei der Bewegung des Drahtes die Lorentz-Kraft:
64
0
0
~
~
K = q · ~ε = q · ~ε + k · (~v × B)
Vom Labor aus gesehen, bewegt sich der Draht und mit ihm die Ladung q mit der Geschwindigkeit ~v . Die
bewegte Ladung stellt einen Strom dar:
~j = q · ~v δ(~r − ~r0 )
Mit dem bekannten Ampére’schen Kraftgesetz können wir nun die Proportionalitätskonstante k bestimmen:
~ = 1·
K
c
Z Z Z
V
~ r0 )
~ r ) dr = 1 q · ~v × B(~
~j(~r) × B(~
c
Mit der Gleichung für die Lorentz-Kraft ergibt sich:
k=
1
c
Allgemein gilt für eine bewegte Punktladung q:
~q
K
~ε0
1
~
· ~v × B
c
1
~
= ~ε + ~v × B
c
= q · ~ε +
bzw.
wobei ~ε0 die Feldstärke im mit ~v bewegten System ist. Mit dem Stokes’schen Satz können wir das Faraday’sche
Gesetz:
I
C
~εd~r = −
1 d
c dt
I I
~ · ~ndf
B
S
~ sind in demselben Bezugssystem und die Fläche
auch in differentieller Form schreiben; vorausgesetzt ~ε und B
S ist zeitunabhängig:
I I ~
1 ∂B
~
∇ × ~ε +
· ~ndf = 0
c ∂t
S
Da dies für jede Fläche S gilt, folgt:
rot ~ε +
1 ∂B
=0
c ∂t
~ = 0 für elektrostatische Felder, die unabhängig davon
Dies ist die zeitabhängige Verallgemeinerung von ∇x
ist, ob ein Draht vorhanden oder nicht vorhanden ist. Damit haben wir die gesuchte Verbindung zwischen
elektrischen und magnetischen Feldern.
4.2
Maxwell’scher Verschiebungsstrom
Die bisher diskutierten magnetischen und elektrischen Grundgesetze sind in folgenden vier Gesetzen zusammengefasst:
Coulomb:
Ampère:
Faraday:
keine magnetischen Ladungen:
65
~ ·D
~ = 4πρ
∇
~ ×H
~ = 4π ~j
∇
c
~
~ × ~ε + 1 ∂ B = 0
∇
c ∂t
~
~
∇·B = 0
Außer dem Faraday’schen Induktionsgesetz haben wir alle Gleichungen aus stationären Vorgängen abgeleitet.
Es gibt zunächst keinen Grund, dass sie auch für zeitabhängige Vorgänge gelten sollen.
Bis 1865 hielt man die obigen Gleichungen für allgemein gültig. Dann jedoch fand Maxwell einen Widerspruch
in den Gleichungen. Die fehlerhafte Gleichung ist das Ampère’sche Gesetz, das nur für Vorgänge mit stationären
~ · ~j = 0 hergeleitet worden war. Die vollständige Beziehung erhält man mit der KontinuitätsgleiStrömen mit ∇
~
~
chung ∇ · j + ∂ρ
∂t = 0, die die Ladungserhaltung ausdrückt.
Maxwell’s geniale Idee war es nun, die Kontinuitätsgleichung mit dem Coulomb’schen Gesetz als verschwindende
Divergenz zu schreiben:
~
~ · ~j + 1 ∂ D = 0
~ · ~j + ∂ρ = ∇
∇
∂t
4π ∂t
Er ersetzte im Ampère’schen Gesetz die Stromdichte ~j durch die Verallgemeinerung für zeitabhängige Felder:
~j
~ ×H
~
∇
~
1 ∂D
→ ~j +
4π ∂t
~
4π ~ 1 ∂ D
·j+
=
c
c ∂t
Diese neue Gleichung beschreibt nicht nur das Magnetfeld stationärer Ströme, wie das Ampère’sche Gesetz,
sondern erfüllt außerdem die Kontinuitätsgleichung für zeitabhängige Felder, die das Ampère’sche Gesetz nicht
erfüllt:
~ ~
~ · (∇
~ × H)
~ = 4π · ∇
~ · ~j + 1 ∂(∇ · D) = 4π ∇
~ · ~j + 4π · ∂ρ
∇
c
c
∂t
c
c ∂t
~ · ~j + ∂ρ
=⇒ ∇
∂t
weil: div rot
= 0
= 0
= 0
~
1 ∂D
Den zu ~j addierten Term 4π
∂t nannte Maxwell den Verschiebungsstrom, der eine wesentliche Bedeutung bei
sich schnell ändernden Feldern bekommt. Ohne ihn wäre keine elektromagnetische Strahlung möglich.
Die Maxwell’schen Gleichungen:
~ ·D
~ = 4πρ
∇
~ ·B
~ =0
∇
~
~ ×H
~ = 4π ~j + 1 ∂ D
∇
c
c ∂t
~
∂
B
1
~ ×E
~+
=0
∇
c ∂t
Zusammen mit der Lorentz-Kraftgleichung und Newton’s 2. Bewegungssatz bilden die Maxwell’schen Gleichungen eine vollständige Beschreibung der Dynamik geladener Teilchen, ihrer Wechselwirkungen und der elektromagnetischen Felder.
Für makroskopisch isotrope Medien gelten noch zusätzlich folgende lineare Beziehungen:
~ = ε~ε
D
~ = µH
~
B
~j = σ~ε
ε = Dielektrizitätskonstante
µ = Permeabilität
σ = spezifische Leitfähigkeit
Für nichtisotrope Medien sind die Konstanten durch entsprechende Tensoren zu ersetzen.
66
4.3
Vektor- und Skalarpotentiale
Die Maxwell’schen Gleichungen stellen gekoppelte partielle Differentialgleichungen dar, die die Komponenten
des elektrischen Feldes mit denen des magnetischen Feldes verbinden. In der bisherigen Form können sie nur
für sehr einfache Probleme gelöst werden. Aus diesem Grund führt man üblicherweise Potentiale ein, wodurch
man eine geringere Anzahl von Gleichungen 2. Ordnung erhält.
~ ·B
~ = 0 immer gilt, kann man B
~ mittels des Vektorpotentials A
~ schreiben:
Da ∇
~ =∇
~ ×A
~
B
Durch Einsetzen in:
~
~ × ~ε + 1 ∂ B = 0
∇
c ∂t
erhält man:
~
1 ∂A
~
=0
∇ × ~ε +
c ∂t
Daraus folgt aber, dass man die Klammer als Gradienten eines skalaren Potentials φ schreiben kann, weil die
Rotation eines Gradientenfeldes immer Null ist:
~
1 ∂A
~
= −∇φ
c ∂t
~
~ − 1 ∂A
~ε = −∇φ
c ∂t
~ε +
~ und ~ε mittels der Potentiale A
~ und φ genügen den zwei homogenen Maxwell’schen GleiDie Definitionen von B
~
chungen. Das dynamische Verhalten von A und φ hingegen wird durch die zwei inhomogenen Maxwell’schen
Gleichungen bestimmt. Der Einfachheit wegen beschränken wir uns im Folgenden auf die mikroskopische Form
der Maxwell’schen Gleichungen.
Für div ~ε = 4πρ folgt:
∆φ +
~ =
Durch Einsetzen für rot B
4π
c
~j +
1 ∂~
ε
c ∂t
1 ∂ ~ ~
(∇ · A) = −4πρ
c ∂t
folgt:
2
~ ∂φ − 1 ∂ A
~ ∇
~ · A)
~ − ∆A
~ = 4π ~j − 1 ∇
∇(
2
c
c
∂t
c ∂t2
2~
~− 1 ∂ A −∇
~ ∇
~ ·A
~ + 1 ∂φ = − 4π ~j
∆A
2
c ∂t2
c ∂t
c
Eichvarianz:
Wir haben bisher die vier Maxwell’schen Gleichungen auf zwei reduziert, die allerdings weiterhin gekoppelt sind.
~ das
Sie können wegen Freiheiten in der Potentialwahl entkoppelt werden. So kann zu dem Vektorpotential A,
~
~
~
~
durch ∇ × A = B B definiert ist, der Gradient einer beliebigen skalaren Funktion Λ hinzuaddiert werden, ohne
~ sich ändert (weil rot grad = 0). B
~ ist also invariant bezüglich der Transformation:
dass B
~ → A
~0 = A
~ + ∇Λ
~
A
~ −
Damit ~ε = −∇φ
~
1 ∂A
c ∂t
invariant bleibt, transformieren wir:
67
φ → φ0 = φ −
1 ∂Λ
c ∂t
denn:
~0
~
~
~ 0 − 1 ∂ A = −∇φ
~ +1∇
~ ∂Λ − 1 ∂ A − 1 ∂ ∇Λ
~ = −∇φ
~ − 1 ∂A
~ε = −∇φ
c ∂t
c
∂t
c ∂t
c ∂t
c ∂t
~ und φ so zu wählen, dass sie die
Diese Freiheit in der Wahl der Potentiale ermöglicht uns, die Potentiale A
Lorentz-Konvention erfüllen:
~ ·A
~ + 1 ∂φ = 0
∇
c ∂t
Durch diese Eichung werden die zwei Maxwell’schen Gleichungen entkoppelt und wir erhalten zwei inhomogene
~
Wellengleichungen, eine für φ und eine für A:
~ 2φ − 1
∇
c2
~ 2A
~− 1
∇
c2
∂2φ
∂t2
~
∂2A
∂t2
= −4πρ
= −
4π ~
j
c
Diese beiden Wellengleichungen zusammen mit der Lorentz-Konvention sind den vier Maxwell’schen Gleichungen äquivalent.
~ und φ heißen Eich-Transformationen. Die Invarianz eines Feldes
Die obigen Transformationen der Potentiale A
bezüglich einer solchen Transformation nennt man Eich-Invarianz. Für die Lorentz-Gleichung gilt:
0
~ ·A
~ 0 + 1 ∂φ = 0
∇
c ∂t
1 ∂2Λ
∆Λ − 2
c ∂t2
2
~ ·A
~ + 1 ∂φ + ∆Λ − 1 ∂ Λ
= ∇
2
c ∂t c ∂t2
~A
~ + 1 ∂φ
= − ∇
c ∂t
Eine weitere, oft benutzte Eichung für Potentiale ist die Coulomb-Eichung (transversale Eichung):
~ ·A
~=0
∇
Es ergibt sich damit für die Maxwell’schen Gleichungen:
1 ∂ ~ ~
∆φ +
(∇ · A)
c ∂t
2
1 ∂ A ~ ~ ~ 1 ∂φ
~
−∇ ∇·A+
∆A − 2
c ∂t2
c ∂t
=⇒ ∆φ
=⇒ φ(x, t)
~−
∆A
1 ∂2A
c2 ∂t2
= −4πρ
4π ~
j
c
= −4πρ
Z Z Z
ρ(~x0 , t)
=
|~x − ~x0 |
1 ~ ∂φ
4π
= − ~j + ∇
c
c
∂t
= −
Das skalare Potential φ rührt in dieser Eichung rein von der elektrostatischen Ladungsverteilung her (daher
auch der Name!).
Auflösung der zeitabhängigen, inhomogenen Wellengleichung durch die Green’sche Funktion:
~ haben in der Lorentz-Eichung die gleiche Struktur:
Die Bestimmungsgleichungen für die Potentiale φ und A
68
1 ∂2ψ
= −4π f (~r, t)
c2 ∂t2
∆ψ(~r, t) −
Die Funktion f (~r, t) beschreibt die zeitabhängige Ladungs- bzw. Stromverteilung. Wir wollen die obige Differentialgleichung mit der Green’schen Funktion lösen, die von (~rt; ~r0 t0 ) abhängt. Die Bestimmungsgleichung für
die Green’sche Funktion ist:
1 ∂2
∆ − 2 2 G(~rt; ~r0 t0 ) = −4π δ(~r − ~r0 )δ(t − t0 )
c ∂t
Durch Einsetzen sieht man, dass:
ψ(~r, t) =
Z
G(~rt; ~r0 t0 )f (~r0 , t0 )dr0 dt0
die Differentialgleichung erfüllt.
Zur Lösung der obigen Differentialgleichung berechnen wir zuerst die Fourier-Transformierte der Green’schen
Funktion:
0 0
G(~rt; ~r t ) =
Z
∞
3
d k
−∞
Z
∞
0
0
~
dω g(~k, ω) eik(~r−~r ) e−iω(t−t )
−∞
Die rechte Seite der Differentialgleichung kann man folgendermaßen schreiben:
δ(~r − ~r0 )δ(t − t0 ) =
1
·
(2π)4
Z
∞
d3 k
−∞
Z
∞
~
0
0
dω eik(~r−~r ) · e−iω(t−t )
−∞
Durch Zusammenfassung der letzten beiden Gleichungen folgt:
Z
+∞
−∞
3
d k
Z
+∞
dω e
i~
k·(~
r−~
r 0 ) −iω(t−t0 )
e
−∞
(
ω2
k − 2
c
2
4π
g(~kω) −
(2π)4
)
=0
Diese Gleichung muss für alle (~r − ~r0 ) und (t − t0 ) gelten. Somit ergibt sich:
1
1
g(~k, ω) = 3
4π (k 2 −
ω2
c2 )
Durch Rücktransformation ergibt sich die gesuchte Green’sche Funktion G(~rt; ~r0 t0 ). Allerdings treten bei der
Integration Schwierigkeiten auf wegen der Nullstellen im Nenner von g(~k, ω). Diese Polstellen werden durch
geeignete Wahl des Integrationsweges umgangen.
Die Wahl des Integrationsweges um diese Polstellen wird durch physikalische Erfordernisse festgelegt: Die Differentialgleichung für G(~rt; ~r0 t0 ) kann als Gleichung für ein skalares Potential aufgefasst werden, das durch eine
Punktladung zur Zeit t0 am Ort ~r0 erzeugt wird. Wegen der Kausalitätsforderung gilt: das Feld kann erst nach
dem Zeitpunkt t0 existieren; t − t0 > 0. Damit gilt:
G(~rt; ~r0 t0 )
für t < t0
für t > t0
=0
6= 0
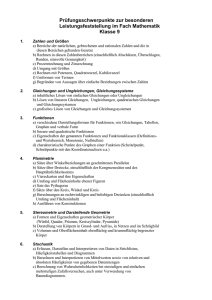
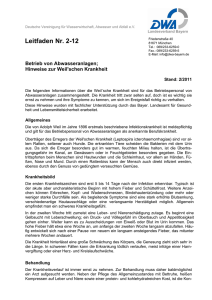
Damit erhalten wir eine Integrationsvorschrift für die Integration des Propagators in der komplexen ω-Ebene.
Wir verschieben die Pole in die untere Halbebene:
69
(t − t0 ) < 0
x
−ck − iη
ω
x
+ck − iη
(t − t0 ) > 0
Mit Hilfe des Residuensatzes lösen wir das Integral:
G(~rt, ~r0 t0 ) =
−c2
4π 3
Z
~
0
d3 k eik(~r−~r )
0
Z
dω
e−iω(t−t )
(ω − ck − iη)(ω + ck − iη)
Für t − t0 > 0 ergibt sich:
G(~rt, ~r0 t0 ) =
Z
c
2π 2
~
0
d3 k eik·(~r−~r )
sin ck(t − t0 )
k
Zur Integration über ~k führen wir Kugelkoordinaten ein:
d3 k
= k 2 dk dϕ sin ϑ dϑ
~k · (~r − ~r0 ) = k · |~r − ~r0 | cos ϑ
Damit ergibt sich:
G(~rt, ~r0 t0 ) =
=
=
c
2π
Z
∞
k 2 dk
Z
2π
dϕ
π
0
dϑ sin ϑ eik|~r−~r | cos ϑ
0
0
0
Z
sin ck(t − t0 )
k
Z +∞
r−~
r0 |
r −~
r0 |
c
ikc(t−t0 − |~
)
−ikc(t−t0 + |~
)
c
c
−
e
dk{e
2π|~r − ~r0 | −∞
( )
1
|~r − ~r0 |
|~r − ~r0 |
0
0
δ t−t −
−δ t−t +
|~r − ~r0 |
c
c
Für t − t0 > 0 erhalten wir die “retardierte“ Green’sche Funktion:
0
r |
δ(t0 − t + |~r−~
c )
G(~rt; ~r t ) =
|~r − ~r0 |
0 0
Damit erhält man sofort die der Kausalität genügenden Lösungen der elektromagnetischen Potentialgleichungen:
0
r|
ρ(~r0 , t − |~r−~
c )
d~r
|~r − ~r0 |
0
0
Z
~ r0 , t − |~r −~r | )
1
0 j(~
c
d~r
c
|~r − ~r0 |
Z
φ(~r, t) =
~ r , t) =
A(~
0
Diese Lösungen nennt man die retardierten Potentiale, denn das Potential am Ort ~r zur Zeit t wird durch die
frühe Ladungs- und Stromverteilung zum Zeitpunkt t0 bestimmt. Die Retardierung ist die Zeit, die ein Lichtsignal braucht, um von der Quelle (~r0 ) zum Aufpunkt (~r) zu gelangen.
Auch die avancierten Potentiale sind Lösungen der Maxwell’schen Gleichungen. Diese erhält man, wenn man
die Pole infinitesimal in die positive ω-Ebene verschiebt, z.B.:
φav (~r, t) =
Z
0
r |
ρ(~r0 , t + |~r−~
c )
d~r
|~r − ~r0 |
0
Diese Potentiale widersprechen der zusätzlichen Kausalitätsforderung.
70
4.4
Energietransport im elektromagnetischen Feld: Der Poynting~
Vektor S
Die Arbeit A = −E (= abgegebene Energie), die von einem elektrischen Feld an einer Punktladung q geleistet
wird, ist:
−E = A =
Z
~kd~r =
Z
q(~εd~r)
C
C
Das magnetische Feld leistet keine Arbeit, weil die magnetische Kraft immer senkrecht zur Geschwindigkeit ist.
Entsprechend beträgt die momentane Leistung einer sich bewegenden Punktladung q:
L=
dA
d~r
= q · ~ε ·
= q · ~v · ~ε
dt
dt
Ein Strom besteht aus vielen Punktladungen qi :
X
~j(~r) =
qi · ~vi δ(~r − ~ri )
i
Die pro Zeiteinheit verbrauchte Energie L = − dE
dt wird in mechanische Energie oder Wärme umgesetzt.
Um das Energieerhaltungsgesetz explizit darzustellen, eliminieren wir zunächst einmal ~j mit dem erweiterten
Ampère’schen Gesetz:
=⇒
Z Z Z
~ ×H
~
∇
=
=⇒ ~j
=
~j · ~εd3 x =
V
=
4π ~ 1 ~˙
j+ D
c
c
c ~
~ − 1 D
~˙
∇×H
4π
4π
Z Z Z ~
1
~ × H)
~ − ~ε · ∂ D d3 x
c · ~ε · (∇
4π
∂t
V
Z Z Z ~
~
∂D
−1
∂B
~
~
~
c · ∇ · (~ε × H) + ~ε ·
d3 x
+H ·
4π
∂t
∂t
V
denn:
~ · (~ε × H)
~
∇
=
~
~
~ε · (∇ × H) =
=
~ · (∇
~ × ~ε) − ~ε · (∇
~ × H)
~
H
~ · (∇
~ × ~ε) − ∇
~ · (~ε × H)
~
H
~
~ · 1 · ∂ B − ∇(~
~ ε × H)
~
−H
c ∂t
Im Folgenden nehmen wir an, dass das benutzte Medium lineare elektrische und magnetische Eigenschaften
besitzt. Ist dies der Fall, so ist die Energiedichte des elektrischen Feldes:
ue =
1
~
~ε · D
8π
~ = ε · ~ε
mit: D
und die Energiedichte des magnetischen Feldes:
um =
1 ~ ~
H ·B
8π
~ = µ·H
~
mit: B
Daraus ergibt sich für die totale Energiedichte eines elektromagnetischen Feldes:
u=
1
~ +B
~ · H)
~
(~ε · D
8π
71
Die Ableitung hiervon:
∂u
∂t
∂E
=⇒ −
∂t
=
=
~
~
1
∂B
∂D
~
−H ·
~ε ·
4π
∂t
∂t
Z Z Z Z Z Z
∂u
c ~
~
~j · ~εdτ = −
+
∇ · (~ε × H) dτ
∂t
4π
V
V
Da das Volumen beliebig war, müssen die Integranden gleich sein, und wir erhalten folgenden Energiesatz:
−
∂u
~ ·S
~ + ~j · ~ε
=∇
∂t
~ stellt den Energiefluss dar:
Der Poynting-Vektor S
~ = c (~ε × H)
~
S
4π
Energie
Fläche × Zeit
Da nur die Divergenz des Poynting-Vektors im Energiesatz erscheint, ist er nur bis auf die Rotation eines
~ Die physikalische Bedeutung des obigen
Vektorfeldes genau bestimmt. Dies rechtfertigt die obige Wahl von S.
Energiesatzes ist Folgende:
Die Änderung der elektromagnetischen Energie in einem bestimmten Volumen ist gleich der durch die Grenz~ und der totalen Arbeit des Feldes an innerhalb des Volumens
flächen nach außen fließenden Energie div S
befindlichen Ladungen.
4.5
4.5.1
Energie- und Impulserhaltung des elektromagnetischen Feldes
Energieerhaltung
Wir betrachten nochmals das Poynting’sche Theorem:
−
∂u
~ ·S
~ + ~j · ~ε
=∇
∂t
Der Term ~j·~ε beschreibt die Umwandlung von elektromagnetischer Energie in mechanische oder Wärme-Energie.
Da die Materie aus geladenen Teilchen besteht, beschreibt ~j · ~ε eine Erhöhung der mechanischen (kinetischen)
Energie der Materie:
d Emech
=
dt
Z Z Z
~
~j · Edτ
V
Nun kann man mit dem Poynting’schen Theorem die Energieerhaltung für ein zusammengesetztes System
folgendermaßen ausdrücken:
dE
d
=
(E
+ EFeld ) = −
dt
dt mech
I I I
~ ·S
~ dτ = −
∇
V
I I
~ · ~ndf
S
SV
wobei:
EFeld =
Z Z Z
V
V dτ =
1
8π
Z Z Z
~2 + B
~ 2 )dτ
(E
V
Es wurde dabei vorausgesetzt, dass durch die Bewegung des Teilchens selbst keine Energie das Volumen V
verlässt. Dies bedeutet, dass eine Abnahme der Energie im Volumen V nur durch Abstrahlung erfolgen kann:
72
−
d
E
=
dt total,V
I I
~ · ~ndf
S
S
mit:
1
Etotal,V = Emech,V +
8π
4.5.2
Z Z Z
~ +H
~ · B)
~ dτ
(~ε · D
V
Impulserhaltung
Die Änderung des Impulses ist nach dem 2. Newton’schen Gesetz:
d~
p
~
=K
dt
Die Kraft auf ein geladenes Teilchen ist die Lorentz-Kraft:
~ × B)
~
~ ` = q · ~ε + q (V
K
c
Wir bezeichnen den Impuls aller Teilchen (Elektronen und Kerne) im Volumen V mit ~pmech ; wir können also
nach dem 2. Newton’schen Gesetz schreiben:
d~
pmech
=
dt
Z Z Z
(ρ~ε +
V
1~ ~
j × B) dτ
c
Der Übergang zur diskreten Verteilung ist durch folgende Ersetzung möglich:
X
→
ρ
qi δ(~r − ~ri )
i
X
→
j
~i δ(~r − ~ri )
qi V
i
Genau wie für das Poynting’sche Theorem benutzen wir die Maxwell’schen Gleichungen, um ρ und ~j zu eliminieren:
ρ
=
~j
=
1 ~
∇ · ~ε
und
4π c ~
1 ∂~ε
~
∇×B−
4π
c ∂t
Durch Einsetzen erhalten wir für den Integranden:
1
~
ρ · ~ε + · ~j × B
c
=
=
1
1 ~ ∂~ε ~
~
~
~
− B × (∇ × B)
~ε · (∇ · ~ε) + B ×
4π
c
∂t
1
1 ∂
~
~
~
~
~
~
~
~
~
~
~ε · (∇ · ~ε) + B · (∇ · B) − B × (∇ × ~ε) − B × (∇ × B) −
(~ε × B)
4π
4πc ∂t
denn:
~ · (∇
~ · B)
~
B
= 0
1 ~ ∂~ε
B×
c
∂t
= −
und
~
∂
~ + ~ε × ∂ B = − ∂ (~ε × B)
~ − ~ε × (∇
~ × ~ε)
(~ε × B)
∂t
∂t
∂t
Damit kann nun die Änderung der Impulsdichte folgendermaßen beschrieben werden:
73
d~
pmech
d
+
dt
dt
Z Z Z
V
1
1
~
=
(~ε × B)dτ
4πc
4π
~ =
Da der Poynting-Vektor S
dem Volumen:
Z Z Z ~ · ~ε) − ~ε × (∇
~ × ~ε) + B
~ · (∇
~ · B)
~ −B
~ × (∇
~ × B)
~ dτ
~ε · (∇
V
~ ist, vermutet man, dass der totale elektromagnetische Impuls p~
~ε × B
Feld in
c
4π
1
p~Feld =
4πc
Z Z Z
~
(~ε × B)dτ
V
ist. Daraus erhalten wir für die Änderung des totalen Impulses im Volumen V folgenden Ausdruck:
d
d
1
~p
=
(~
p
+~
pFeld ) =
dt total dt mech
4π
Z Z Z ~
~
~
~
~
~
~
~
~ε · (∇ · ~ε) − ~ε × (∇ × ~ε) + B · (∇ · B) − B × (∇ × B) dτ
V
Um einen Erhaltungssatz zu bekommen, brauchen wir rechts ein Oberflächenintegral über einen Impulsfluss aus
V heraus oder ein Volumenintegral über eine entsprechende Divergenz. Rechts steht ein Vektor (oder anders
ausgedrückt: ein Tensor 1. Stufe). Wollen wir diesen als Divergenz schreiben, muss hinter “div“ ein Tensor 2.
Stufe (Dyade) stehen. Hierzu einige Wiederholungen:
Ein Tensor 0. Stufe ist ein Skalar, z.B.:
~ =
~ε · B
X
i
Bx
~
εi · Bi = (εx , εy , εz ) By = ~εt · B
Bz
t = transponiert
Ein Tensor 1. Stufe ist ein Vektor, z.B.:
εx
~ε = εy
εz
ε~t = (εx , εy , εz )
Ein Tensor 2. Stufe ist eine Dyade, z.B.:
εx Bx
εx
~ t = εy (Bx , By , Bz ) = εy Bx
ε·B
~
εz Bx
εz
Einheitsgrade:
I
mit:
εx By
εy By
εz By
εx Bz
εy Bz
εz Bz
1 0 0
= ex etx + ey · ety + ez · etz = 0 1 0
0 0 1
0
0
1
ez = 0
ey = 1 ;
ex = 0 ;
1
0
0
~ × (∇
~ × B)
~ =
Mit dem Begriff der Dyade und folgender Vektoridentität: B
d~
p
den entsprechenden Teil des Integranden von total :
1
2
~ B
~ t · B)
~ − (B t ∇)
~ B
~ ergibt sich für
∇(
dt
~ t · B)
~
~t· B
~B
~ t − 1 I · (B
∇
2
Bx
1 0 0
1
~ 2
=
· By (Bx , By , Bz ) − 0 1 0 · B
2
0 0 1
Bz
~ B
~ 2 ) = B(
~ ∇
~ t B)
~ −B
~ × (∇
~ × B)
~
~ ∇
~ t B)
~ + (B
~ t · ∇)
~ B
~ − 1 ∇(
= B(
2
∂ ∂ ∂
,
,
∂x ∂y ∂z
74
d
p~
dt total
=
(Gauß) =
mit:
Z Z Z
1
~ ·B
~t − 1 B
~ 2 I dτ
~ t · ~ε~εt − 1 ~ε2 · I + B
∇
4π
2
2
IV I
I I
1
1 X
dfi Tik =
df~ · T~
4π i
4π S
S
Tik = Bi Bk −
1 2
1
B δik + εi εk − ε2 δi,k
2
2
Damit ergibt sich der folgende Impulserhaltungssatz:
−
d
1
ptotal =
dt
4π
I I
~n · (−T~ )df
S
wobei −~n · T~ den Impulsfluss aus dem Volumen V per Einheitsfläche pro Zeiteinheit angibt.
75