Schaltungstechnik 1
Werbung

Schaltungstechnik 1
∀ für alle gilt
∃ für mindestens eines gilt
Grundlagen:
Ist die Wellenlänge der zu übertragenden Frequenz in einer Schaltung größer als die Schaltung selbst, so spricht
man von einem konzentrierten Bauelement. Ist sie kleiner, so ist das Bauelement nicht konzentriert.
λ=
c
f
λ > 10 ⋅ l
⇒ konzentriertes Bauteil
Spannungspfeile zeigen immer von + nach -!! Assoziierte Zählpfeile: Spannungs- und Strompfeil zeigen in die
selbe Richtung.
+
-
Tore:
Gilt i1 = i2 so spricht man von einem Tor (Eintor)!
i1
i2
Kirchhoff:
KCL (Kirchhoff’s Current Law):
Die Ströme aller Stromzweige, die eine beliebige Hülle, welche verschiedene Bauelemente einer Schaltung
einschließt, durchstoßen müssen sich zu jedem Zeitpunkt zu Null addieren. Dabei werden die Ströme die von
Außen nach Innen führen negativ und die Ströme, die von Innen nach Außen führen positiv gerechnet.
∑ i (t ) = 0
k
k
In der MatrixVektorSchreibweise gilt:
A⋅ i = 0
Eine Schaltung aus n-Knoten hat (n-1) linear unabhängige Knotengleichungen. Dabei ist die linear abhängige
Knotengleichung stets die, die für den Bezugsknoten aufgestellt wird.
In der Knoteninzidenzmatrix A steht eine Zeile für einen Knoten und eine Spalte für einen Zweig. Für die
Elemente dieser Matrix gilt:
aβα
⎧1 Zweig α geht vom Knoten β aus ⎫
⎪
⎪
= ⎨−1 Zweig α führt zum Knoten β
⎬
⎪0 Zweig α berührt Knoten β nicht ⎪
⎩
⎭
β
Zeilenindex (Knoten)
α
Spaltenindex (Zweige)
Copyright by ~Gesus~
Stand: 20.02.2004
1/17
KVL (Kirchhoff’s Voltage Law):
In einem geschlossenen Stromkreis einer Schaltung muss die Summe der Spannungen zwischen zwei Knoten in
einem Umlauf immer gleich Null sein. Dabei werden die Spannungen gemäß der Richtung ihrer Spannungspfeile
positiv bzw. negativ gerechnet.
∑
u=0
für alle Zählpfeile positiv!
umlauf
Für die Spannung zwischen zwei Knoten
Bezugsknoten):
α
und
β
gilt ( ukα ist die Spannung zwischen Knoten
α
und
uαβ (t ) = ukα (t ) − uk β (t )
In der MatrixVektorSchreibweise gilt:
M ⋅ uk − u = 0
Dabei gibt es bei einer Schaltung mit n-Knoten (n-1) Spalten in der Matrix. Die wegfallende Spalte ist diejenige,
die für den Bezugsknoten entsteht.
Für die Elemente der Matrix
mαβ
M gilt hier:
⎧1 Zweig α geht vom Knoten β aus ⎫
⎪
⎪
= ⎨−1 Zweig α führt zum Knoten β
⎬
⎪0 Zweig α berührt Knoten β nicht ⎪
⎩
⎭
α
Zeilenindex (Zweige)
β
Spaltenindex (Knoten)
Aus dem Vergleich mit der Matrix
gewählt wurden):
A des KCL folgt (Wenn die Zählpfeile für Strom und Spannung gleich
mαβ = aβα
M = AT
T
transponiert
Netzwerkgraph (gerichtet) [digraph]:
In einer Schaltung gibt es die Knotenmenge N , die Zweigmenge B und Zuordnungsvorschriften, die einem
Zweig aus der Zweigmenge die jeweiligen Knoten aus der Knotenmenge zuordnet. Für einen Transistor reichen
im Netzwerkgraph zwei Zweige.
Resistive (gedächtnislose) Eintore:
⎧
⎩
u (t )
i (t )
ξui = ⎨(u , i ) |
ℑ(t )
u
i
⎫
∈ , ∈ ⎬
V
A
⎭
ℑ ≤ ξui , ℑ(t ) = {(u , i ) | (u , i ) zulässige Betriebspunkte}
Für jedes resistive Eintor lässt sich eine Kennlinie ℑ aufstellen. Diese kann durch eine „Funktion“ beschrieben
werden. Dies kann explizit, implizit oder parametrisiert erfolgen.
i = i0 ⋅ arctan
f (u , i ) =
i = i0 ⋅ φ
Copyright by ~Gesus~
u
u0
u = u0 ⋅ tan
i
i0
i
u
− arctan = 0
i0
u0
u = u0 ⋅ tan φ
Stand: 20.02.2004
(explizit)
(implizit)
(parametrisiert)
2/17
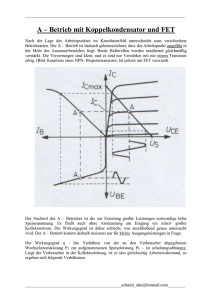
Polung resistiver Eintore:
Ein resistives Eintor gilt als ungepolt (bilateral) wenn gilt:
∀ ( u , i ) ∈ ℑ ⇒ ( −u , − i ) ∈ ℑ
Die Kennlinie ℑ hat somit einen punktsymmetrischen Verlauf. Für alle anderen Verläufe ist das Eintor gepolt
(unilateral).
i
Leistung resistiver Eintore:
p (t ) = u (t ) ⋅ i (t )
∀(u, i ) ∈ ℑ : u ⋅ i ≥ 0
∃(u, i ) ∈ ℑ : u ⋅ i < 0
∀(u , i ) ∈ ℑ : u ⋅ i = 0
∃(u, i ) ∈ ℑ : u ⋅ i ≠ 0
aktiv
passiv
Î ℑ ist passiv (nimmt Leistung auf)
Î ℑ ist aktiv (kann Leistung abgeben)
u
verlustlos
Î ℑ ist verlustlos & passiv
Î ℑ ist verlustbehaftet (passiv oder aktiv)
Ein Eintor ist spannungsgesteuert, wenn durch eine Spannung u ein bestimmter Betriebspunkt i festgelegt
wird. i = g (u ) .Wird durch einen Strom eine bestimmte Spannung eingestellt, so ist das Eintor stromgesteuert.
Ein resistives Eintor wird als quellenfrei bezeichnet, wenn ℑ durch den Ursprung (0,0) geht.
Dualität:
ℑ = {(u, i ) | f (u, i) = 0} → ℑd = {(u, i) | f d (u, i ) = 0}
u ⎞
⎛
f d (u, i ) = f ⎜ i ⋅ R d , d ⎟
R ⎠
⎝
R D = Dualitätsinvariante
ℑd lässt sich im u-i-Diagramm leicht bilden, wenn man das Diagramm so skaliert, das R d genau die
d
Winkelhalbierende ergibt. Man muss dann lediglich ℑ an der Winkelhalbierenden spiegeln.
d
Für ℑ bleiben alle Leistungseigenschaften gleich, lediglich die Art der Steuerung (Spannung/Strom) wird
umgekehrt.
Strenge Linearität:
ℑ verläuft streng linear, wenn gilt: [linear, wenn Ursprung nicht dabei ist, aber ansonsten linear verläuft]
∀(u1 , i1 ), (u2 , i2 ) ∈ ℑ ∧ α , β ∈
⇒ (α u1 + β u2 ,α i1 + β i2 ) ∈ ℑ
Es gibt drei Arten für die strenge Linearität:
ξu ,i ) idealer ohmscher Widerstand
Ursprungspunkt (0 dimensionaler linearer Unterraum von ξu ,i ) Nullator
U-i-Ebene (2 dimensionaler linearer Unterraum von ξu ,i ) Norator
Ursprungsgerade (1 dimensionaler linearer Unterraum von
Spezielle Ursprungsgeraden:
Kurzschluss ( KS ) u = 0 i = beliebig
Leerlauf ( LL ) i = 0 u = beliebig
Copyright by ~Gesus~
Stand: 20.02.2004
3/17
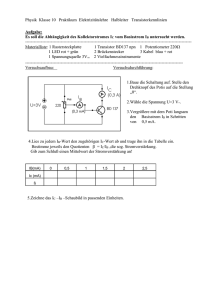
Diodenmodelle:
PN-Diode
Zener-Diode
i
Tunneldiode
i
i
UZ
u
u
Is
u
⎛ u
⎞
i = I s ⋅ ⎜ e U T − 1⎟
⎜
⎟
⎝
⎠
Grundschaltungen:
Parllelschaltung:
Durch die Parallelschaltung zweier Bauteile entsteht ein neues Bauteil.
Nach Kirchhoff gilt:
i = i1 + i2
u = u1 = u2
Die Kennlinien der beiden Grundelemente sind gegeben durch:
{
ℑ1 = {(u1 , i1 ) | f1 (u1 , i1 ) = 0}
ℑ2 = {(u2 , i2 ) | f 2 (u2 , i2 ) = 0}
}
⇒ g = ( u, i ) | ∃i1 : ( ( u, i1 ) ∈ ℑ1 ∧ ( u , i − i1 ) ∈ ℑ2 )
ℑ1 ∧ ℑ2 sind spannungsgesteuert ⇒ g spannungsgesteuert
i1 = g1 (u1 )
i2 = g 2 (u2 )
⇒ i = g (u ) = g1 (u ) + g 2 (u )
Reihenschaltung:
Durch die Reihenschaltung zweier Bauteile entsteht ein neues Bauteil.
i = i1 = i2
{
}
⇒ g = ( u, i ) | ∃u1 : ( ( u1 , i ) ∈ ℑ1 ∧ ( u − u1 , i ) ∈ ℑ2 )
u = u1 + u2
ℑ1 ∧ ℑ2 sind stromsgesteuert ⇒ g stromgesteuert
Nach Kirchhoff gilt:
u1 = r1 (i )
u2 = r2 (i )
⇒ u = r (i ) = r1 (i ) + r2 (i )
Copyright by ~Gesus~
Stand: 20.02.2004
4/17
Lineare Quellen:
i
Eine lineare Quelle kann aus mehreren
Bauteilen bestehen. Sie kann jedoch als
lineare Quelle mit nebenstehender
Kennlinie interpretiert werden. Dazu wird
die Leerlaufspannung, der
i = G ⋅ u − I0
Kurzschlussstrom und der
Innenwiderstand benötigt. Um den
Innenwiderstand zu bekommen, werden
alle Spannungsquellen in einen
Kurzschluss und alle Stromquellen in
einen Leerlauf umgewandelt.
i
1
R
u
Q
u
G
1
Eine derartige lineare Quelle lässt sich auf zwei verschiedene Weisen durch Ersatzschaltbilder darstellen:
Reihenschaltung:
i1
i2
ideale Spannungsquelle
R
u0
u1
u2
U0
Helmholz-Tebener-Ersatzschaltbild
Parallelschaltung:
i1
ideale Stromquelle
u1
I0
G=
1
R
u
i2
Mayer-Norten-Ersatzschaltbild
u2
Ermittlung des Innenwiderstandes:
Spannungsquellen in Kurzschluss und Stromquellen in
Leerlauf umwandeln, dann den Gesamtwiderstand
bestimmen.
Copyright by ~Gesus~
Stand: 20.02.2004
5/17
i
Konkave und Konvexe Widerstände:
Konkav
Konvex
i
i
i
i
I
∪
○
u
u
U
u
u
(U , G )
( I , R)
Ideale Diode
i
i
i
u
u
u
u
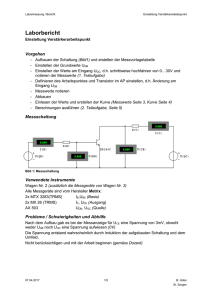
Eintorgrundschaltungen:
i
i'
Q
Arbeitspunkt:
u
u'
Q ⇒ (u ', i ')
L ⇒ (u, i )
L
i ' = -i u ' = u
Q x = {(u , i ) | (u, −i ) ∈ Q}
i
AP = L ∩ Q x
L
Q
u
Qx
Copyright by ~Gesus~
Stand: 20.02.2004
6/17
Arbeitspunkt und Kleinsignalanalyse:
Man nimmt eine Linearisierung im Arbeitspunkt vor!
Das sich um den Arbeitspunktverändernde Kleinsignal darf nicht zu groß sein, da die Linearisierung sonst zu
weit von dem ursprünglichen Graphen abweicht.
i = I0 +
df (u )
| ⋅u
du AP
(Tangentengleichung im Arbeitspunkt)
Spannungs-/Stromteiler:
Spannungsteiler
Stromteiler (dual zum Spannungsteiler)
u
R1
i
i1
R2
i1
i2
u1 G1
u2
u1
KVL: u = u1 + u2
KVL: u = u1 = u2
KCL: i = i1 = i2
KCL: i = i1 + i2
u1 =
R1
⋅u
R1 + R2
i1 =
G2 u2
u
G1
⋅i
G1 + G2
u1 R1
=
u2 R2
u2 =
i
i2
i1 G1
=
i2 G2
R2
⋅u
R1 + R2
i2 =
G2
⋅i
G1 + G2
Darstellung als realer Quellenzweipol:
U 0 = Ri ⋅ I 0
I0
Copyright by ~Gesus~
U0
Stand: 20.02.2004
7/17
⎡u ⎤
⎥=0
⎣i ⎦
[M , N ]⋅ ⎢
M ⋅u + N ⋅ i = 0
Zweitore:
i1
1
i2
1'
i1
M invertierbar Î R existiert
N invertierbar Î G existiert
2
u2
u1
2'
i2
{
⎧⎛ u ⎞
ℑ = ⎨⎜ ⎟ |
⎩⎝ i ⎠
}
ℑ = u1 , i1 , u2 , i2 | f ( u1 , i1 , u2 , i2 ) = 0
Widerstandsdarstellung
u1 = r1 ( i1 , i2 )
u2 = r2 ( i1 , i2 )
Leitwertdarstellung
i1 = g1 ( u1 , u2 )
i2 = g 2 ( u1 , u2 )
Hybriddarstellung
u1 = h1 ( i1 , u2 )
i2 = h2 ( i1 , u2 )
Inverse Hybriddarstellung
i1 = h1 ' ( u1 , i2 )
u2 = h2 ' ( u1 , i2 )
Kettendarstellung
u1 = a1 ( u2 , −i2 )
i1 = a2 ( u2 , −i2 )
Inverse Kettendarstellung
u2 = a1 ' ( u1 , −i1 )
i2 = a2 ' ( u1 , −i1 )
u = r(i)
u = R⋅ i
i = g (u )
i = G ⋅u
⎛ ⎛ i1 ⎞ ⎞
⎛ u1 ⎞
⎜ ⎟ = h ⎜⎜ ⎟⎟
⎝ i2 ⎠
⎝ ⎝ u2 ⎠ ⎠
⎛ u1 ⎞
⎛ i1 ⎞
⎜ ⎟=H⎜ ⎟
⎝ i2 ⎠
⎝ u2 ⎠
⎛ ⎛ u1 ⎞ ⎞
⎛ i1 ⎞
⎜ ⎟ = h '⎜ ⎜ ⎟ ⎟
⎝ u2 ⎠
⎝ ⎝ i2 ⎠ ⎠
⎛ ⎛ u2 ⎞ ⎞
⎛ u1 ⎞
⎜ ⎟ = a ⎜⎜ ⎟⎟
⎝ i1 ⎠
⎝ ⎝ −i2 ⎠ ⎠
⎛ u1 ⎞
⎜ ⎟=
⎝ i1 ⎠
Existiert immer!!!!
⎡ u ⎤ ⎡ u (1)
⎢ i ⎥ = ⎢ (1)
⎣ ⎦ ⎣i
⎡U ⎤
Bild ⎢ ⎥
⎣I ⎦
⎛ u2 ⎞
A⎜ ⎟
⎝ −i2 ⎠
⎛ ⎛ u1 ⎞ ⎞
⎛ u2 ⎞
⎜ ⎟ = a '⎜ ⎜ ⎟ ⎟
⎝ i2 ⎠
⎝ ⎝ −i1 ⎠ ⎠
Bildbeschreibung
(Betriebsmatrix)
4D-Betriebsraum, durch
math. Beschreibung auf
Untermenge eingeschränkt
⎫
⎛u⎞
f ⎜ ⎟ = 0⎬
⎝i⎠
⎭
u (2) ⎤
⎥⋅c
i (2) ⎦
G, R daraus erzeugbar!
Darstellungen existieren (bis auf Bildbeschreibung) als
Matrizen nur bei streng linearen Zweitoren!!!
R = G −1 =
2 Messungen durchführen; wenn
diese beiden
Messungen linear unabhängig
sind, kann man damit die
komplette Kennlinie im
4-Dimensionalen Betriebsraum
beschreiben. Eine Messung
macht man, indem man 2 der 4
Betriebsgrößen vorgibt und die
anderen beiden ausrechnet.
Diese Methode ist oft sehr
einfach, da man nur die Werte
von 2 Messungen
braucht.
1 ⎡ g 22 − g12 ⎤
det G ⎢⎣ − g 21 g11 ⎥⎦
Jacobi Matrix der partiellen Ableitungen:
⎛ ∂g1
⎜ ∂u
Δi = ⎜ 1
⎜ ∂g 2
⎜ ∂u
⎝ 1
∂g1 ⎞
∂u2 ⎟
⎟ ⋅ Δu
∂g 2 ⎟
∂u2 ⎟⎠
Δi = J ⋅ Δu = G ⋅ Δu
Δu = R ⋅ Δi
⎛ i1 ⎞ ⎛ I1 ⎞ ⎛ Δi1 ⎞
⎜ ⎟ = ⎜ ⎟+⎜ ⎟
⎝ i2 ⎠ ⎝ I 2 ⎠ ⎝ Δi2 ⎠
R = G −1
Linearisierung im Arbeitspunkt bei Zweitoren mit der Jocobi-Matrix! (ACHTUNG: g muss im AP
differenzierbar sein!!!!)
Copyright by ~Gesus~
Stand: 20.02.2004
8/17
Zweitormatrizen:
Umrechnung:
1. Aufschreiben der gegebenen Form
2. Linke Seite mit Einheitsmatrix erweitern
3. Alles auf eine Seite bringen
4. Matrizen (Gegebene+Einheitsmatrix) und Spaltenvektor zusammenfassen
5. Sortieren des Spaltenvektors (Matrix mit umsortieren) Î [M|N]
6. Mit inverser der Matrix N von links multiplizieren Î [N-1M|En]
7. Matrix wieder zerlegen: Î [N-1M]*x+[ En]*y=0
8. Nach y=... Auflösen!
G
R
H
H'
A
A'
Eigenschaften von Zweitoren:
Verlustlos
R = − RT
Matrix ist schiefsymmetrisch, d.h. Hauptdiagonale gleich 0
u T ⋅ i = u1i1 + u2i2 = 0 Nach i1 oder i2 auflösen (=0)
G = −G T
Reziprok
R = RT
(Übertragungssymmetr
isch)
G = GT
Matrix ist symmetrisch!
det A = 1
Reziprok Î Nur durch Widerstände & Übertrager realisierbar
Passiv
u ⋅i ≥0
Umkehrbar
Gu = G
Dual
Rd = ( Rd ) ⋅ G
T
G = PGP
R = PRP
Permutationsmatrix
⎡0 1 ⎤
P=⎢
⎥
⎣1 0 ⎦
2
2
⎛ 1 ⎞
G =⎜ d ⎟ ⋅R
⎝R ⎠
d
Nicht quellenfreie, lineare Zweitore:
Enthält ein Zweitor Quellen, so lassen sich die interne Quellen aus dem Zweitor herausnehmen und als getrennte
Quellen betrachten. Dazu muss z.B. die Leitwertbeschreibung zerlegbar sein:
⎛ i1 ⎞
⎛ u1 ⎞ ⎛ iQ1 ⎞
⎜ ⎟ = G ⋅ ⎜ ⎟ + ⎜⎜ ⎟⎟
⎝ i2 ⎠
⎝ u2 ⎠ ⎝ iQ 2 ⎠
Dadurch lässt sich dann ein ESB für das Zweitor aufstellen, wobei die Quellen jetzt außerhalb sind und ihre
Position sowie Richtung eindeutig aus der Rechnung gegeben sind.
Copyright by ~Gesus~
Stand: 20.02.2004
9/17
Gesteuerte Quellen:
i1 = 0
Spannungsgesteuerte Stromquelle USI
(Voltage Controlled Current Source VCCS)
i2 = g ⋅ u1
u1
u2
⎡ 0 0⎤
G=⎢
⎥
⎣ g 0⎦
Stromgesteuerte Stromquelle ISI
(Current Controlled Current Source CCCS)
⎡0 −1 g ⎤
A=⎢
0 ⎥⎦
⎣0
i2 = β ⋅ i1
i1
u1 = 0
⎡0
H =⎢
⎣β
Spannungsgesteuerte Spannungsquelle USU
(Voltage Controlled Voltage Source VCVS)
u2
0⎤
0 ⎥⎦
0 ⎤
⎡0
A=⎢
⎥
⎣0 −1 β ⎦
i1 = 0
i2
u2 = μ ⋅ u1
u1
⎡0
H'=⎢
⎣μ
Stromgesteuerte Spannungsquelle ISU
(Current Controlled Voltage Source CCVS)
0⎤
0 ⎥⎦
i1
⎡1 μ
A=⎢
⎣ 0
0⎤
0 ⎥⎦
i2
u1 = 0
⎡0 0⎤
G=⎢
⎥
⎣ r 0⎦
u2 = r ⋅ i1
⎡ 0 0⎤
A=⎢
⎥
⎣1 r 0 ⎦
Spezielle Zweitore:
M ⋅u + N ⋅ i = 0
Nullor
i1
u1
Copyright by ~Gesus~
i2
u2
Stand: 20.02.2004
⎡1 0 ⎤
⎡0 0⎤
⎢ 0 0 ⎥ u + ⎢1 0 ⎥ i = 0
⎣
⎦
⎣
⎦
⎡0 0 ⎤
ANullor = ⎢
⎥
⎣0 0 ⎦
10/17
Übertrager
i1
u1 ü
=
u2 x
ü:x
u2
u1
i1
x
=−
i2
ü
Gyrator
M ⋅u + N ⋅ i = 0
i2
i1
i2
u2
u1
⎡1 −ü ⎤
⎡ 0 0⎤
⎢ 0 0 ⎥ u + ⎢ü 1 ⎥ i = 0
⎣
⎦
⎣
⎦
⎡ 0 ü⎤
H =⎢
⎥
⎣ −ü 0 ⎦
M ⋅u + N ⋅ i = 0
⎡ 0
⎡1 0 ⎤
⎢0 1 ⎥ u + ⎢ − R
⎣
⎦
⎣ 2
⎡ 0 − R1 ⎤
R=⎢
0 ⎥⎦
⎣ R2
R1 ⎤
i =0
0 ⎥⎦
M ⋅u + N ⋅ i = 0
NIK
(Negativ Immitanz
Konverter)
u1
NIK
u2
⎡1 k ⎤
⎡0 0 ⎤
+
u
⎢0 0 ⎥
⎢1 1 k ⎥ i = 0
⎣
⎦
⎣
⎦
⎡ −k 0 ⎤
A=⎢
⎥
⎣ 0 1 k⎦
Zusammenschaltung von Zweitoren:
Parralelschaltung
Reihenschaltung
(1)
(1)
( 2)
( 2)
Reihenparallelschaltung
Parallelreihenschaltung
(1)
(1)
( 2)
( 2)
Kettenschaltung
(1)
Copyright by ~Gesus~
( 2)
( 2)
Stand: 20.02.2004
(1)
11/17
Transistor:
Unterscheidung in PNP, NPN Transistoren. Als Zweitor in Basis-, Emitter-, Kollektorgrundschaltung.
Ebers-Moll-Gleichungen:
n-Schicht: Elektronenüberschuss
p-Schicht: Elektronenmangel
⎛ Uube
⎞
i1 = I es ⋅ ⎜ e T − 1⎟
⎜
⎟
⎝
⎠
ubc
⎛
⎞
i2 = I cs ⋅ ⎜ eUT − 1⎟
⎜
⎟
⎝
⎠
NPN
PNP
Vorwärtsbetrieb:
Vorwärtsbetrieb:
ube > 0 und ucb > 0
ueb > 0 und ubc > 0
⇒ uce = ucb + ube > 0
⇒ uce = −ubc − ueb < 0
Basisgrundschaltung:
ic = −α F ⋅ ie
Basisgrundschaltung:
ic
ie
ie
α F ⋅ ie
ueb
ic
ueb
−α F ⋅ ie
ib
ib
Emittergrundschaltung:
Steuerfaktor β
ib
F
=
ic
αF
1−αF
uce
ube
Emittergrundschaltung:
ic
ib
ube
uce
β F ⋅ ib
− β F ⋅ ib
ie
ie
1
⋅ Δube
re
Δic = g m ⋅ Δube =
Δic = β F ⋅ Δib
vu =
Δu 2
(Spannungsverstärkungsfaktor)
Δu1
Verwendung der ESB:
Großsignal
Detailliert
Kleinsignal
ib
ic
ib
uce
ube
ic
uce
ube
β F ⋅ ib
β F ⋅ ib
ie
ie
Grob
ib
β →∞
ic
uce
ube
β F ⋅ ib
u = 0,6V
Copyright by ~Gesus~
ib
ic
uce
ube
β F ⋅ ib
ie
ie
Stand: 20.02.2004
12/17
NPN Basisgrundschaltung:
ic
ie
α F ⋅ i1
α R ⋅ i2
ie = −i1 + α R ⋅ i2
ic = α F ⋅ i1 − i2
ubc
ube
i1
i2
ib = −ie − ic
Betrieb in Vorwärtsrichtung:
Î Basis-Emitter-Diode in Durchlassrichtung
Î Basis-Kollektor-Diode in Sperrrichtung
Î i2 ≈ 0 Î Kollektor-Diode durch Leerlauf ersetzen
ic
ie
ueb
⎛ Uube
⎞
ie = − I ES ⎜ e T − 1⎟
⎜
⎟
⎝
⎠
ic = −α F ⋅ ie
α F ⋅ i1
i1
ib
Emitterschaltung:
ic = β F ⋅ ib
re
innerer Emitterwiderstand
1
gm =
re
Steilheit
re = −
Δic = g m ⋅ Δube
UT
Ie
Δic = β F ⋅ Δib
PNP Bei PNP drehen sich im Vergleich zu NPN lediglich die Vorzeichen um. Alle Parameter bleiben gleich.
Im KSEB und Idealisierung zu Nullor tritt kein Unterschied mehr auf.
MOS-Transistoren: (Metal-Oxide-Semiconductor) FET
n-Kanal
Enhancement Transistor
“Normally-off” FET
n-Kanal
Depletion Transistor
“Normally-on” FET
d
id
g
ig
u gs
p-Kanal
Enhancement Transistor
“Normally-off” FET
d
id
uds
s
g
ig
u gs
d
id
uds
s
ig
u gs
uds
s
Bereiche:
Bereiche:
( I ) : u gs − uth < 0V
( II ) : 0 ≤ ugs − uth ≥ uds
( III ) : 0 ≤ u gs − uth ≤ uds
Copyright by ~Gesus~
g
( I ) : ugs − uth > 0V
( II ) : 0 ≥ ugs − uth ≤ uds
( III ) : 0 ≥ ugs − uth ≥ uds
Stand: 20.02.2004
13/17
uds ≥ 0
uds
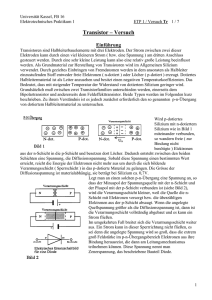
Shichman-Hodges:
i1
s
id
i2
u gs
u gd
ig = 0
Drei Betriebsbereiche:
I.Bereich: i1 = 0 i2 = 0
II.Bereich: i1 > 0
uth
g
⇒ id = 0
für u gs ≤ uth ⎫
⎧⎪0
⎪
i1 = ⎨
⎬
2
⎪⎩1 2 β ( u gs − uth ) für u gs ≥ uth ⎭⎪
d
für u gd ≤ uth ⎫
⎧⎪0
⎪
i2 = ⎨
⎬
2
⎪⎩1 2 β ( u gd − uth ) für u gd ≥ uth ⎭⎪
Schwellspannung
Sperrbereich!
i2 > 0
Linearer Bereich, Triodenbereich (Anlaufstrombereich)
⎧⎪u gs − uth ≥ 0 ⎫⎪
⎨
⎬ ⇒ 0 ≤ u gs − uth ≥ uds
⎩⎪u gd − uth ≥ 0 ⎭⎪
⎡
u2 ⎤
id = i1 − i2 = β ⋅ ⎢( u gs − uth ) ⋅ uds − ds ⎥
2 ⎦
⎣
III.Bereich: i1 > 0
II
β
2
u
i2 = 0
2
ds
Sättigungsbereich, Pentodenbereich
⎪⎧u gs − uth ≥ 0 ⎪⎫
⎨
⎬ ⇒ 0 ≤ u gs − uth ≤ uds
⎩⎪u gd − uth ≤ 0 ⎭⎪
III
id = i1 =
I
β
2
⋅ ( u gs − uth )
2
Linearisierung im AP:
Δid
g
Δu gs
g0
d
Δuds
s
g m ⋅ Δu gs
Δid =
∂id
∂i
| AP ⋅Δu gs + d | AP ⋅Δuds
∂u gs
∂uds
∂id
= gm
∂u gs
∂id
= g0
∂uds
Copyright by ~Gesus~
⎡ ∂ig
⎢
∂u gs
G | AP = ⎢
⎢ ∂id
⎢
⎣⎢ ∂u gs
Stand: 20.02.2004
∂ig ⎤
⎥
∂uds ⎥
| AP
∂id ⎥
⎥
∂uds ⎦⎥
14/17
Logische Schaltungen:
(ausgeprägt nichtlineare Schaltungen im Großsignalbetrieb)
u ' = f (u )
y = F ( x)
Alle Gatter können mit NAND oder NOR Gattern realisiert werden.
NOT
u
NAND
NOR
u'
UB
u2
u1
UB
u2
u'
u'
u1
UB
ACHTUNG: Nie Verbindung vom Ausgang zum Eingang!!!!
CMOS Gatter bestehen aus zwei Netzwerken! Einem Pull-up Netzwerk (PUN) (Nur PMOS, da harte 1; Gate 0
Î PMOS schließt) und einem Pull-down Netzwerk (PDN) (Nur NMOS, da harte 0; Gate 1 Î NMOS schließt)
Dabei stellt das PUN die Funktion F (out) dar. Für das PDN gilt die Funktion G. G = F . Aus der Funktion Out
versuchen das PUN aufzustellen. Das PDN danach dual dazu generieren.
Operationsverstärker (OPV):
ud = u1+ − u1−
U B+
i1− ≈ 0
i1−
ud −
+
i1+
u1+
u1−
i1+ ≈ 0
i2
u2 = Ac ⋅ uc
u2 = A0 ⋅ ud
uc =
U B−
u1+ + u1−
2
u2
u2
ud
III
+U sat
II
I
ud ≤
u2,max
A0
ud
−U sat
Copyright by ~Gesus~
Stand: 20.02.2004
15/17
+
+
ud
−U sat u2
+
ud
ud
−
−
−
II:
I:
+U sat u2
III:
u2 = −U sat
u2 ≤ U sat
u2 = +U sat
ud < 0
ud = 0
ud > 0
Gesteuerte Quellen:
i1 ⋅ R
ISU
i1
R = −r
R
−
u1 = 0
u2 = −i1 ⋅ R
+
USU
i1 = 0
u1
μ ≥1
+
−
⎛ R ⎞
u2 = i ⋅ ( R1 + R2 ) = u1 ⎜1 + 2 ⎟
⎝ R1 ⎠
R2
i
R1
i
u1 = i ⋅ R1
USI
i1 = 0
u1
g=
+
−
R
i2 = g ⋅ u1 = −
R
R
R2
i
R1
μ
i
u1 = i ⋅ R1
μ ⋅ u1
R
R
−
+
R
⎛ R ⎞
u = u1 ⎜1 + 2 ⎟ = μ ⋅ u1
⎝ R1 ⎠
ISI
i1
i1
u1 = 0
R
R
R
R
−
−
+
+
R
u = −i1 ⋅ R
Copyright by ~Gesus~
Stand: 20.02.2004
16/17
Allgemeine Analyseverfahren:
In der gegebenen Schaltung das Verbindungsmehrtor aufstellen (besteht aus allen Verbindungen und Knoten).
Dazu einen Netzwerkgraphen aufstellen. Aufstellen der B’-Matrix (Maschen / Kanten) und der A’-Matrix (
Hüllen / Kanten)
⎡
⎢
B' = ⎢
⎢
⎢
⎣
⎡
⎢
A' = ⎢
⎢
⎢
⎣
⎤
⎥
⎥ ( n × b)
⎥
⎥
⎦
⎤
⎥
⎥ ( m × b)
⎥
⎥
⎦
⎧1 wenn Zweig k in Masche j pos. orientiert ⎫
⎪
⎪
b jk = ⎨0 wenn Zweig k in Masche j nicht vorkommt ⎬
⎪-1 wenn Zweig k in Masche j neg. orientiert ⎪
⎩
⎭
⎧1 Zweig k durchstößt Hülle i von innen nach außen ⎫
⎪
⎪
aik = ⎨0 Zweig k durchstößt Hülle i nicht
⎬
⎪-1 Zweig k durchstößt Hülle i von außen nach innen ⎪
⎩
⎭
⎛ u ⎞ ⎡B ' 0 ⎤ ⎛ u ⎞
⇒ [M N ]⋅ ⎜ ⎟ = ⎢
⎥ ⋅⎜ ⎟ = 0
⎝ i ⎠ ⎣ 0 A '⎦ ⎝ i ⎠
Vorgehensweise beim Aufstellen:
1.
2.
3.
4.
5.
6.
7.
Verbindungsnetzwerk aufstellen (Auch Dummiebaum, d.h. zusätzliche Baumzweige einfügen)
Baum festlegen (Baum muss alle Knoten einmal berühren; minimal Anzahl von Zweigen) Î Zuerst
Kanten des Baumes durchnummerieren, dann bei den Verbindungszweigen (Rest) weitermachen
Niedrigste Verbindungskante wählen und Schleife legen, die nur über Baumkanten geschlossen wird.
Orientierung in Richtung Verbindungskante. Î erste Zeile in der B-Matrix!!!
Fortfahren, bis keine Verbindungskanten mehr übrig sind. Î Gleichungen lin. unabhängig!!
s = b − (n − 1)
Weitermachen mit Matrix A.
Hülle festlegen, die von erster Baumkante durchstoßen wird und keiner weiteren Baumkante Î erste
Zeile in der A-Matrix. Weitermachen für alle Baumkanten.
Beide Matrizen enthalten entweder auf der Baumseite (A) oder auf der Verbindungsseite (B) die
A = [ En −1 , Av ]
Einheitsmatrix. Î A ⋅ i = 0
B⋅u = 0
⎛i⎞
⎝ iv ⎠
[ En−1 , Av ] ⋅ ⎜ b ⎟ = 0
8.
9.
Av = − BbT
B = [ Bb , Es ]
⎛ ub ⎞
⎟=0
⎝ uv ⎠
[ Bb , Es ] ⋅ ⎜
M ⋅u + N ⋅ i = e
⎡B
⎢0
⎢
⎢⎣ M
Copyright by ~Gesus~
0⎤
⎛0⎞
⎛u ⎞ ⎜ ⎟
⎥
A⎥ ⋅⎜ ⎟ = ⎜ 0 ⎟
i
N ⎥⎦ ⎝ ⎠ ⎝⎜ e ⎠⎟
Stand: 20.02.2004
17/17