Statik und Dynamik
Werbung

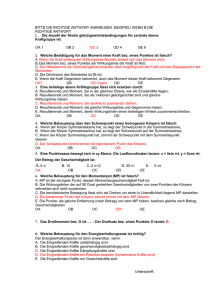
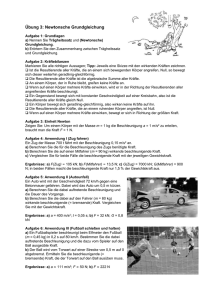
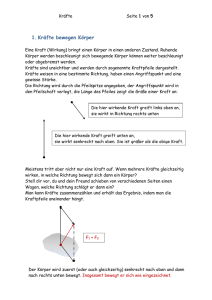
IP Fakultät Grundlagen Ingenieurpädagogik Summer-School Experimentierfeld 1 Statik und Dynamik 1. Einführung Überlegungen im Bereich der Statik und Dynamik beruhen stets auf der physikalischen Größe Kraft F. Betrachten wir Kräfte und ihre Wirkung auf einen ausgedehnten Körper, also keinen Massenpunkt, so ist neben der Wirkungsrichtung und dem Betrag der Kraft auch der Angriffspunkt entscheidend. Die Kraft ist also ein Vektor, welcher durch Betrag und Richtung definiert ist. Vektorgrößen werden stets durch r einen Pfeil über dem Formelbuchstaben gekennzeichnet ( F ). Kräfte sind die Ursache von Bewegungen und Bewegungsänderungen. Dieser Teilbereich der Mechanik wird als Dynamik bezeichnet. Im Gegensatz dazu beschreibt die Statik die Wirkung und Verteilung von Kräften auf ruhende Körper, die sich in einem Kräftegleichgewicht befinden. Würde sich an einem Körper eine noch so kleine resultierende Restkraft ergeben, so würde der Körper gemäß den Axiomen von Newton beschleunigt und damit in Bewegung versetzt. 2. Addition von Kräften Jede wirkende Kraft kann bezüglich eines beliebig ausgerichteten Koordinatensystems in Teilkräfte zerlegt werden. Dies bedeutet aber in der Umkehrung, dass beliebige an einem gemeinsamen Angriffspunkt angreifende Kräfte durch eine Ersatzkraft ersetzt werden können. Diese Ersatzkraft wird durch geometrische Addition (vektorielle Addition) der Einzelkräfte gebildet. Fakultät Grundlagen Ingenieurpädagogik IP Summer-School Formal ergibt sich für die Vektoraddition der Teilkräfte hier: r r r r r r r FRe s = F1 + F2 + F3 + F4 + F5 + F6 = 0 Je nach Richtung der Einzelkräfte ergeben sich bei der geometrischen Addition der Kräfte so genannte Kräfteparallelogramme. Die Berechnung der resultierenden Kraft in einem solchen Kräfteparallelogramm erfolgt mit Hilfe der trigonometrischen Funktionen (Sinus, Kosinus und Tangens) oder im Fall rechtwinkliger Einzelkräfte mit Hilfe des Satzes des Pythagoras. 3. Kraft und Gegenkraft (actio = reactio) In der Natur treten Kräfte grundsätzlich paarweise auf, dies bedeutet, dass jede Kraft eine Gegenkraft hervorruft. Newton nannte dieses Prinzip „actio = reactio“. Man kann sich diesen Sachverhalt sehr schnell an einfachen Beispielen veranschaulichen: Liegt ein Körper mit einer gewissen Masse auf einem Tisch, so wirkt auf ihn die Gewichtskraft FG = m . g. Dass diese Kraft stets wirkt, wissen wir, da ohne Tisch der Körper auf den Boden fallen würde. Trotz dieser wirkenden Kraft verbleibt der Körper aber in Ruhe. Dies ist aber nur dann der Fall, wenn am Körper keine resultierende Kraft wirkt. Also muss eine zweite Kraft auftreten, die die Gewichtskraft ausgleicht. 4. Linienflüchtigkeit von Kräften Handelt es sich bei den von uns betrachteten Körpern um starre Körper, die sich unter Wirkung der Kräfte nicht verformen, so können die am Körper angreifenden Kräfte entlang ihrer Wirkungslinie beliebig verschoben werden. Dies bedeutet, dass häufig zwei oder mehr an einem Körper angreifende Kräfte in einen gemeinsamen Angriffspunkt verschoben werden können. Mit Hilfe der Addition von Kräften kann daraus eine resultierende Kraft gebildet werden. Fakultät Grundlagen Ingenieurpädagogik IP Summer-School F1 S Fres F2 5. Wirkung einer Kraft 5.1 Die Entstehung eines Moments Man erkennt im vorangehenden Bild, dass die resultierende Kraft nicht im Schwerpunkt S des starren Körpers angreift. Verschiebt man ihren Angriffspunkt entlang ihrer Wirkungslinie bis die Verbindungslinie zwischen Schwer- und Angriffspunkt senkrecht auf der Wirkungslinie stehen, kann der Betrag des sich ergebenden Moments M sehr einfach berechnet werden. M = FRes ⋅ r Der Faktor r repräsentiert dabei den Abstand zwischen dem Schwerpunkt und dem Angriffspunkt der Kraft. Die Richtung des entstehenden Moments kann mittels der „Rechten-Hand-Regel“ unter Verwendung der drei orthogonal zueinander stehenden Finger Daumen (Kraft), Zeigefinger (Abstand) und Mittelfinger (Moment) angegeben Fakultät Grundlagen Ingenieurpädagogik IP Summer-School werden. Formal und im allgemeinen Fall berechnet sich das Moment aus dem Vektor- oder Kreuzprodukt des Kraft und des Abstandsvektors: r r r r r M = F × r = F ⋅ r ⋅ sin ϕ Der Winkel ϕ definiert dabei den eingeschlossenen Winkel zwischen den beiden Vektoren, so dass im Fall der Rechtwinkligkeit der einfache Zusammenhang entsteht. M F1 S r Fres F2 5.2 Die Entstehung einer Beschleunigung Die unter 5.1 diskutiert Wirkung einer Kraft ist eigentlich ein spezieller Fall der nun betrachteten Wirkung. Entsteht durch eine angreifende Kraft ein Moment an einem starren Körper, so wird dieser radial beschleunigt (Rotation) bis die Wirkungslinie der Kraft durch den Schwerpunkt des Körpers verläuft. Sobald diese Ausrichtung des Körpers abgeschlossen ist, wird der Körper in Richtung der Kraft weiter beschleunigt und führt eine geradlinige Bewegung aus (Translation). Dieser Sachverhalt, dass Fakultät Grundlagen Ingenieurpädagogik IP Summer-School eine auf einen Körper wirkende Kraft stets eine Beschleunigung zur Folge hat, geht auf Newton zurück. Das fundamentale Axiom lautet: r r F = m⋅a Durch die Vektoren wird klar, dass die entstehende Beschleunigung stets in Richtung der wirkenden Kraft hat. Paradebeispiel für die Beschleunigung eines Körpers aufgrund einer angreifenden Kraft ist die Gravitationsbeschleunigung (Ortsfak- r tor) g , welche stets zum Erdmittelpunkt gerichtet ist. Die sie hervorrufende Kraft ist die Massenanziehungskraft (Gravitationskraft) zwischen der Erde und jeder beliebigen Masse. 5.3 Die Entstehung einer Verformung Die Verformung eines Körpers aufgrund einer angreifenden Kraft kann unmittelbar mit der Beschleunigung als Wirkung erklärt werden. Hängt man an eine Feder mit einer bestimmten Federkonstante k eine Masse m, so wird diese Masse aufgrund der Gravitationskraft zum Erdmittelpunkt hin beschleunigt. Die Feder wir zunehmend gedehnt und würde im Extremfall zerstört (unelastische Verformung), wenn nicht mit zunehmender Dehnung der Feder eine rückstellende Kraft die beschleunigende Kraft vermindern würde. Gehen wir von einer elastischen Verformung der Feder aus, so gilt das Hookesche Gesetz: r r FFeder = k ⋅ s Die rückstellende Kraft der Feder erhöht sich also linear und sorgt so bei einer Auslenkung sGG für eine Kompensation der Gravitationskraft. Die resultierende Kraft und damit die resultierende Beschleunigung sind im Gleichgewicht gleich Null. 6. Mögliche Experimente Die Komponenten des Experimentiersatzes ermöglichen Ihnen Versuche und Experimente aus den folgenden Teilbereichen: 1. Wesen einer Kraft, Zerlegung und Addition 2. Schwerpunkt und Gleichgewichtslage 3. Kraftumformende Einrichtungen