4.6 Steuerung - antriebstechnik.fh
Werbung

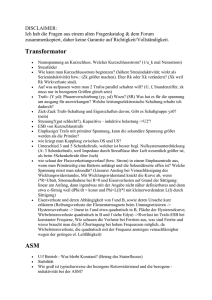
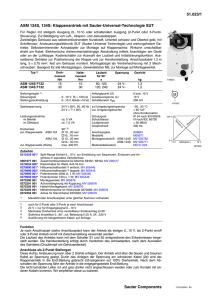
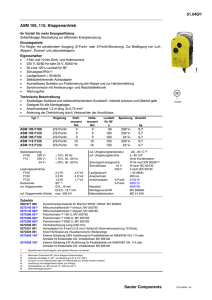
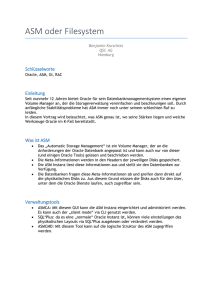
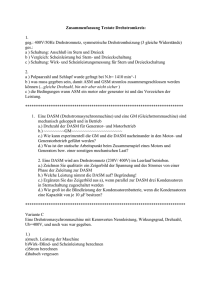
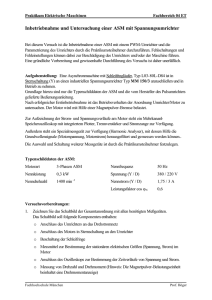
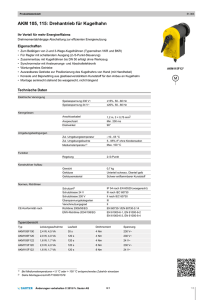
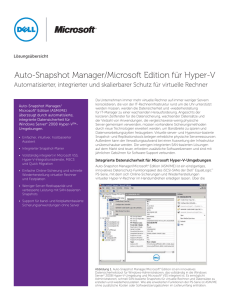
4.6 ASM: Steuerung Seite 1 Drehzahlstellung Aus der Grundgleichung (4.2-3) für die Drehzahl f n = 1 (1 − s ) p ergeben sich drei Möglichkeiten zur Drehzahlsteuerung einer ASM: 1. Vergrößerung des Schlupfes s • Vorwiderstände im Läuferkreis von Schleifringläufer • Absenkung der Klemmenspannung 2. Änderung der Polpaarzahl p • Ständerwicklung unterschiedlicher Polzahl • Polumschaltbare Wicklung (Dahlander) 3. Änderung der Speisefrequenz f1 • Umrichterschaltungen der Leitungselektronik Schlupfsteuerung Vorwiderstand im Läuferkreis: Das Drehmoment der ASM kann gemäß Gleichung (4.3-30) über p p R M= PCu2 = m2 I22 2 sω ω s berechnet werden, wenn I2 der Strangstrom im Rotor eines Schleifringläufers und R2 den Strangwiderstand darstellt. Wird zusätzlich in den Läuferkreis der Maschine ein Vorwiderstand R2V geschaltet, so ergibt sich p R +R M * = m 2I2∗2 2 ∗ 2v . ω s Unter der Voraussetzung, dass bei der gewünschten Drehzahländerung das Lastmoment konstant ist, bleibt auch der Rotorstrom näherungsweise konstant. Durch Gleichsetzen M = M ∗ erhält man den für die Schlupfänderung erforderlichen Vorwiderstand s∗ R2V = − 1 R2 (4.6-1) s FG H IJ K Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33 4.6 ASM: Steuerung Seite 2 Bild 4.6-1: Drehzahleinstellung durch Läufervorwiderstände R2V Änderung der Klemmenspannung Nach Gleichung (4.3-31) ist das Kippmoment proportional dem Quadrat der Klemmenspannung. Änderungen der Klemmenspannung ergeben die in Bild 4.6-2 dargestellten Verläufe der n(M ) Kennlinien Bild 4.6-2: n(M ) -Kennlinien bei variabler Klemmenspannung: a) normaler Läufer, b) Widerstandsläufer für Lüfterantriebe Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33 4.6 ASM: Steuerung Seite 3 Zwischen der Abgabeleistung P2 und den Kupferverlusten PCu2 lässt sich nach Gleichung (4.3-27) und (4.3-28) folgender Zusammenhang angeben: PCu2 = P2 s . 1− s (4.6-2) Bei in etwa konstanter Abgabeleistung steigen die Verluste der ASM mit zunehmendem Schlupf überproportional an! Änderung der Polpaarzahl Getrennte Wicklung: Der Stator wird mit zwei oder auch mehr Wicklungen ausgestattet. Da immer nur eine Wicklung eingeschaltet ist, kann bei zwei getrennten Wicklungen nur der halbe Nutraum ausgenutzt werden. Wegen der erhöhten Kupferverluste im Stator reduziert sich die Bemessungsleitung der Maschine auf etwa 70%. Dahlanderschaltung Werden Drehzahlen im Verhältnis 1:2 benötigt, so verwendet man fast immer eine polumschaltbare Wicklung nach Dahlander (Bild 4.6-3). Bei der Dahlanderschaltung sind immer alle Wicklungszweige eingeschaltet, der Nutraum ist also voll ausgenutzt. Die Spulenweite kann bei der Umschaltung nicht verändert werden. Dadurch ergibt sich bei Verwendung von Durchmesserspulen für die hochpolige Wicklung zwangsläufig bei der halben Polzahl eine Schrittverkürzung auf y τ p = 0,5 . Die Maschine erreicht deshalb bei doppelter Drehzahl nicht die doppelte Leistung, sondern nur das 1,5 bis 1,8-fache der Leistung bei kleiner Drehzahl. Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33 4.6 ASM: Steuerung Seite 4 Bild 4.6-3: Prinzip der Dahlanderschaltung ∆ / YY Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33 4.6 ASM: Steuerung Seite 5 Änderung der Speisefrequenz Durch Änderung der Speisefrequenz kann die Drehzahl der Asynchronmaschine stufenlos gesteuert werden. Damit die magnetische Ausnutzung der Maschine nicht verändert E wird, muss wegen Φ h ~ das Verhältnis zwischen induzierter f Spannung und Speisefrequenz der Statorwicklung konstant gehalten werden. Hieraus ergibt sich bei Vernachlässigung des Statorwiderstandes die typische Steuerkennlinie eines Frequenzumrichters gemäß Bild 4.6- 4. Bild 4.6-4: Steuerkennlinie U f für den Betrieb einer Asynchronmaschine an einem Frequenzumrichter Ist die maximale zur Verfügung stehende Spannung des Versorgungsnetzes erreicht, kann die Frequenz nur noch bei konstanter Spannung erhöht werden. Wegen der Schwächung des Hauptflusses spricht man vom Feldschwächebetrieb. Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33 4.6 ASM: Steuerung Seite 6 Bild 4.6-5: Drehzahlkennlinien einer frequenzgesteuerten Asynchronmaschine Das Kippmoment ist im Feldschwächebereich proportional 1 f12 (4.3-31). Das Belastungsmoment ist bei der geforderten konstanten Leistung proportional 1 f1 . Dadurch ergibt sich eine Grenzdrehzahl, bei der das Kippmoment keinen genügenden Sicherheitsabstand zum Lastmoment mehr besitzt. Bei üblichen Asynchronmaschinen liegt die Drehzahlgrenze in etwa bei der doppelten Nenndrehzahl. Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33 4.6 ASM: Steuerung Seite 7 Zur Einstellung der Speisefrequenz benutzt man heute meist Frequenzumrichter mit netzgeführtem Gleichrichter, Gleichspannungszwischenkreis (U-Umrichter) und Wechselrichter (Bild 4.6-6) Bild 4.6-6: Prinzipschaltung eines Frequenzumrichters mit Spannungszwischenkreis. Die Steuerung der Spannung erfolgt über die sogenannte Pulsweitenmodulation (Bild 4.6-7). Die Induktivitäten der Maschine sorgen dafür, dass bei genügend hoher Taktfrequenz der Motorstrom quasi sinusförmig ist. Bild 4.6-7: Pulsweitenmodulation der Zwischenkreisspannung nach dem Unterschwingungsverfahren, UG : Grundschwingung Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33 4.6 ASM: Steuerung Seite 8 Anlaufschaltungen Das direkte Hochfahren eines Asynchronmotors ist durch hohe Anlaufströme (4IN...8IN ) bei verhältnismäßig kleinem Anlaufmoment gekennzeichnet. Insbesondere der Schleifringläufer kann unter Last i. A. nicht anlaufen. Wie schon im Abschnitt "Drehzahlstellung" gezeigt, kann mit der Gleichung (4.6-1) ein gewählter Arbeitspunkt der Drehmomentenkennlinie zu beliebigen anderen Schlupfwerten s ∗ hin verschoben werden. Soll z. B. ein Schleifringläufer bei s ∗ = 1 mit Bemessungsmoment bzw. Bemessungsstrom anfahren, so ergibt sich der Vorwiderstand zu R2 V = R2 (1 sN − 1) , soll er mit Kippmoment anfahren, so gilt R2 V = R2 (1 sK − 1). Durch mehrfaches Stufen des Vorwiderstandes während des Hochlaufs kann quasi mit konstantem Moment, bzw. Strom angefahren werden (Bild 4.6-8). Nach der Richtlinie VDE0660 soll in etwa mit einem Maximalmoment von M 2 = 15 , MN und einem Um, MN gestuft werden (Bild 4.6-8) schaltmoment von M1 = 11 Bild 4.6-8: Anlassvorgang bei einem Schleifringläufer Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33 4.6 ASM: Steuerung Seite 9 Der Anlaufstrom des Käfigläufers kann nur durch Absenkung der Strangspannung reduziert werden. Während der Strom linear mit der Spannung sinkt, reduziert sich das Drehmoment quadratisch mit der Spannung, was sich nachteilig auf das Anlaufverhalten des Käfigläufers auswirkt. Seit langem gebräuchlich ist die sogenannte Stern-DreieckSchaltung, wo während des Anlaufs der Motor im Stern mit einer um 3 reduzierten Strangspannung geschaltet ist (Bild 4.6-9) Bild 4.6-9: Spannungen, Ströme und Drehmomente bei dem Stern-DreieckAnlauf Denkbar ist auch das Anfahren über Transformatoren oder das Schalten von Vorwiderständen in eine oder mehrere Motorzuleitungen (Kusaschaltung) Elektronische Sanftanlasser, die den Anlaufstrom auf den zulässigen Wert begrenzen, kommen ebenfalls zu Einsatz. Diese Anlasser können zusätzlich dazu eingesetzt werden, bei längeren Leerlaufzeiten der Maschine die Verluste durch Absenkung der Klemmenspannung zu reduzieren. Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33 4.6 ASM: Steuerung Seite 10 Bremsschaltungen Wird eine Asynchronmaschine an eine Gleichspannungsquelle angeschlossen, so baut sich ein Feld im Luftspalt auf, dessen Grundwelle räumlich sinusförmig aber zeitlich konstant ist. Dies ist ein "Drehfeld" mit der Drehfrequenz null. Aus jeder beliebigen Drehzahl wird der Asynchronmotor also auf die "synchrone Drehzahl" des Drehfeldes n0 = 0 gebremst. Der Motor entwickelt im Stillstand kein Haltemoment. In Bild 4.6-10 sind verschiedene Schaltungen für die Gleichstrombremsung dargestellt, wobei der Gleichstrom Id so eingestellt ist, dass sich die gleiche Gesamtdurchflutung wie bei Bemessungsstrom IN ergibt. Bremskennlinien sind in Bild 4.6-11 dargestellt. Bild 4.6-9: Schaltungen zur Gleichstrombremsung einer ASM 3 3 IN , c) Id = IN , d) Id = 6IN a)Id = 2IN , b) Id = 2 2 Bild 4.6-11: Bremskennlinien bei Gleichstrombremsung und Läufervorwiderstände Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33 4.6 ASM: Steuerung Seite 11 Eine Gegenstrombremsung erhält man, wenn bei einem mit Nenndrehzahl laufenden ASM zwei Zuleitungen vertauscht werden (Bild 4.6-12). Das Drehfeld kehrt seine Richtung um und der Motor beschleunigt auf die negative synchrone Drehzahl (Bild 4.6-13). Bild 4.6-12: Schaltung zur Umkehrung der Drehfeldrichtung Bild 4.6-13: Bremskennlinie bei Gegenstrombremsung Sowohl Gleich- als auch die Gegenstrombremsung sind sogenannte Verlustbremsungen, da die kinetische Energie des Antriebs in Wärme (Rotor) umgesetzt wird. Mit Hilfe eines Frequenzumrichters kann eine ASM auch durch kontinuierliche Reduzierung der Drehfelddrehzahl gebremst werden. Die kinetische Energie wird in den Gleichspannungszwischenkreis zurückgespeist, was einer Erhöhung der Zwischenkreisspannung bewirkt. Die überschüssige Energie im Zwischenkreis kann mit Hilfe eines zugeschalteten Widerstandes in Wärme umgesetzt werden (Brems-Chopper, Verlustbremsung) oder aber mit einer geeigneten Schaltung in das Netz zurückgespeist werden (Nutzbremsung). Fachhochschule Düsseldorf FB Elektrotechnik Prof. Dr. R. Gottkehaskamp 4.6 ASM Steuerung.doc,13.04.99 14:33