Nr. 1 Atwood´sche Fallmaschine Teil A
Werbung

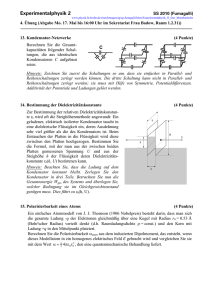
KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Nr. 1 Atwood´sche Fallmaschine Teil A Mithilfe der Atwood´schen Fallmaschine sind verschiedene Bewegungsvorgänge zu analysieren. Abb.1: Atwood'sche Fallmaschine Die Atwood´sche Fallmaschine benützt die Erdbeschleunigung als Ursache für die Bewegungsänderung. Durch die Verwendung von zwei über einen Faden miteinander verbundenen unterschiedlichen Gewichten wirkt dabei nicht die volle Erdbeschleunigung, sondern nur der Anteil, der durch die Gewichtsdifferenz gegeben ist. Dadurch wird die effektive Beschleunigung zur einfach beobachtbaren Größe reduziert. Da der Verbindungsfaden dabei über eine Rolle geführt, wird muss auch die Drehbewegung der Rolle mitberücksichtigt werden. 1. Notwendiges Basiswissen Einfache Bewegungsvorgänge; Newton´sche Gesetze, Kenntnis über Begriffe wie: Masse, Kraft, Beschleunigung, Geschwindigkeit, Ort und Zeit; Einfluss von Reibung auf Bewegungsvorgänge; Zusammensetzung von Linear- und Rotationsbewegungsvorgängen. P.Knoll, Atwood´sche Fallmaschine 1 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I 2. Aufgabenstellungen a) Bestimme das Weg-Zeit-Diagramm einer gleichmäßig beschleunigten Bewegung mithilfe der Atwood´schen Fallmaschine. b) Berechne aus dem Weg-Zeit-Diagramm das Geschwindigkeits-Zeit-Diagramm, das Beschleunigungs-Zeit-Diagramm und das Beschleunigungs-Geschwindigkeits-Diagramm c) Werte aus den erstellten Diagrammen den Anteil der Reibung aus. d) Analysiere die Bewegung einer über die Rolle fallender Kette. Vorgangsweise ad a) Vor Starten der Messung wird durch Doppelklicken der Ikone "getatwood" der Computer in Aufnahmebereitschaft versetzt. Ein eigenes Fenster (Übertragungsfenster) wird am Bildschirm geöffnet und die aktuellen Daten der seriellen Schnittstelle angezeigt. Die Gewichte werden in Ausgangsstellung gebracht. Dabei wird der rechte Kontakt geschlossen. Bei Loslassen des Fadens bewegt sich die schwerere der beiden Massen beschleunigt nach unten. Dabei wird der Auslösekontakt freigegeben, was den Messvorgang startet. Wenn das leichtere Gewicht oben an der Prallplatte anstößt, wird der Endkontakt betätigt und der Messvorgang beendet. Die pro Längenintervall gemessenen Zeiten werden an den Computer übertragen. Wenn im geöffneten Übertragungsfenster keine Fehlermeldung ausgegeben wird, so war die Datenübertragung erfolgreich. Die Daten werden im file "test.dat" auf D:\daten abgespeichert. Durch Betätigung der "Return" Taste wird das Übertragungsfenster geschlossen. Falls ein Fehler aufgetreten ist, muss das Experiment wiederholt werden. Durch Doppelklicken der Ikone "atwood" wird ORIGIN gestartet, welches für dieses Experiment bereits vorbereitet konfiguriert ist. Durch aktivieren des Worksheets und der Spalte A kann mit der Funktion Importieren ASCII das file "test.dat" in die Spalte A übertragen werden. Die Werte sind auf ihre Richtigkeit zu überprüfen. Es kann öfters vorkommen, dass die Randwerte unvollständig übertragen werden; diese sind dann im Worksheet zu löschen. Um die richtigen Zeitwerte für die x-Achse und die richtigen Wegwerte für die y-Achse zu erhalten, muss noch richtig kalibriert werden. Dazu muss während der Messung die Gesamtzeit tG, welche zwischen Startvorgang (Lösen des Startkontaktes) und Beendigung (Betätigung des Endkontaktes) verstrichen ist,, mit einer Stoppuhr gemessen werden. Außerdem muss die Gesamtwegstrecke lG mit dem Rollmaßband bestimmt werden. In die Spalte t des Worksheet sind die Daten aus Spalte A so skaliert zu übertragen, dass die Gesamtzeit (letzter gültiger übertragener Wert) genau der gemessenen Gesamtzeit entspricht. Ebenso sind in der Spalte s die richtigen Wegstrecken einzutragen. Diese sind äquidistant mit den übertragenen Zeitwerten. Demnach entspricht dann die Anzahl N der übertragenen Werte der Gesamtlänge lG, wodurch sich die richtige Skalierung als Weginkrement lG/N ergibt. Das Wegzeitdiagramm kann dann im richtigen Maßstab und richtig skaliert dargestellt werden. Durch Fitten mit einem quadratischen Polynom kann die wirksame Beschleunigung, ein möglicher Offsetwert des Weges etc. bestimmt werden. Der Versuch kann mit 2 verschiedenen Trägheitsmomenten der Umlenkrolle durchgeführt werden. Das Trägheitsmoment der Umlenkrolle wird aus der Masse ermittelt. ad b) Durch Differenzieren des zurückgelegten Weges mit der Zeit werden die benötigten weiteren Diagramme erstellt. Wird das Differenzieren numerisch als Spaltenberechnung in ORIGIN programmiert, dann ist zu beachten, dass aufgrund der Ungenauigkeit der Messwerte in den höheren Ableitungen großes Rauschen auftreten kann. Dieses Rauschen kann reduziert werden, indem die Weg und Zeitdifferenzen über ein größeres Intervall genommen werden. Durch Fitten der P.Knoll, Atwood´sche Fallmaschine 2 KFUG, Inst. f. Experimentalphysik, ad c) ad d) 3. ad a) Laborübungen aus Experimentalphysik I erhaltenen Diagramme mit den entsprechenden theoretisch abgeleiten Funktionen, welche der Bewegung zugrunde liegen, können die Randbedingungen s0, t0, v0 und die wirksame Beschleunigung bestimmt werden. Durch Vergleich der gemessenen Daten in Weg-Zeit-, Geschwindigkeits-Zeit- und Beschleunigungs-Zeit-Diagramm mit der entsprechend gerechneten Kurve, wird die Differenz als auftretende Reibung interpretiert. Wird die Differenz zwischen gerechneter und gemessener Beschleunigung mit der wirksamen trägen Masse multipliziert, so kann die wirksame Reibungskraft direkt abgelesen werden. Aus den Diagrammen Beschleunigung-Zeit, Beschleunigung-Weg und BeschleunigungGeschwindigkeit können Hinweise gefunden werden, ob die wirksame Reibung eine konstante Kraft ist (z.B. Gleit- oder Rollreibung), oder ob Inhomogenitäten eine Rolle spielen (Ortsabhängigkeit der Reibung) oder eine Geschwindigkeitsabhängigkeit der Reibung eine Rolle spielt. Der Versuch mit der fallenden Kette kann in gleicher Weise durchgeführt werden wie unter a) beschrieben, nur mit dem Unterschied, dass zum Starten und Stoppen der Messung die entsprechenden Schalter zusätzlich händisch bedient werden müssen. Das entsprechende Zahnrad ist als Umlenkrolle zu montieren. Die Montage der Gewichte sollte hier nicht erfolgen, da dann das Gesamtgewicht zu groß wird und die Lager und Achse beschädigt werden können. Zur Auswertung notwendige Zusammenhänge t (i ) = A(i ) l Max ( A(i ) ) = A(imax ) , s (i ) = G i , imax tG 1 2 s(t ) = s0 + b(t − t 0 ) − bt 0 (t − t0 ) + v0 (t − t0 ) 2 ad b) v (t ) = b(t − t0 ) + v0 , b = g ad c) siehe ad a) und ad b) ad d) b= M 2 − M1 M M1 + M 2 + r 2 g (M 2 − M 1 + ρ f (2l 2 (0) − l0 )) − 2 gρ f x I Mr , 2 = + π rρ f I r 2 M 1 + M 2 + ρ f l0 + 2 r P.Knoll, Atwood´sche Fallmaschine 3 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Nr. 1 Atwood´sche Fallmaschine Teil B 4. Beschreibung der Geräte 4.1. Geräteliste 1. Atwood'sche Fallmaschine mit Elektronik zur Datenerfassung und serieller Schnittstelle zum Übertragen der Messdaten zum Computer. Zweite Umlenkrolle und Zahnrad mit Fahrradkette. 2. Computer mit Windows 2000, Übertragungsprogramm, ORIGIN zum Auswerten. 3. Maßband 4. Stoppuhr 4.2. Detailbeschreibungen Umlenkrolle Atwood-Maschine Stop-Kontakt Start-Kontakt Computer Zubehör Schnittstelle Umlenkrolle Maßband, Stopuhr Zahnrad Kette P.Knoll, Atwood´sche Fallmaschine 4 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Ad 1) Die Atwood'sche Fallmaschine besitzt auf der Achse der Umlenkrolle einen optischen Geber, welcher Impulse pro zurückgelegter Wegstrecke abgibt. In der nachfolgenden Elektronik wird die Zeit seit dem Startvorgang, welcher durch Lösen des rechten Kontaktes erfolgt, pro Impuls und somit pro zurückgelegter Wegstrecke gemessen und abgespeichert. Nach Beendigung, welche durch Betätigung des linken Kontaktes erfolgt, werden die gespeicherten Zeitwerte über eine Serielle Schnittstelle (COM1:, 9600Bd, 8Bit, no parity, 1 Stoppbit) automatisch ohne Handshake gesendet. Durch Betätigung der Starttaste wird die Elektronik zurückgesetzt und alle bisherigen Messdaten gelöscht. Die Umlenkrolle ist einfach auswechselbar und kann gegen eine Umlenkrolle mit anderem Trägheitsmoment getauscht werden oder es kann die Zahnkranzrolle für die Fahrradkette montiert werden. Ad 2) Mit dem Usernamen "student" kann der Computer benützt werden. Das Password bitte vom Betreuer erfragen. Zwei Programme sind für den Versuch vorbereitet. Das erste ist ein DOSbatch Programm, welches die serielle Schnittstelle (COM1:) auf die richtigen Werte setzt und dann mit copy die Daten von der seriellen Schnittstelle in ein file "test.dat" überträgt. Dieses Programm wird mit der Ikone "getatwood" gestartet. Da durch die geringe Priorität des Benützers "student" das System die Übertragung, welche ohne handshake erfolgt, stören kann, können Übertragungsfehler auftreten. Der Versuch ist dann zu wiederholen. Die Bearbeitung des files "test.dat" erfolgt mit ORIGIN. Dazu ist bereits ein dafür adaptiertes Projekt erstellt, welches über die Ikone "atwood" gestartet werden kann. Diese Programme können vom Benutzer "student" nicht überschrieben werden. Sollen die notwendigen Änderungen im Origin Projekt gespeichert werden, so muss dies unter einem anderen Namen erfolgen. 5. Besondere Hinweise zum Umgang mit dem Gerät, Sicherheitshinweise Vorsicht vor den beschleunigten Massen! Vor allem die fallende Kette kann vom Zahnrad springen und bei unvorsichtiger Position zu Verletzungen führen! Die Massen am Faden sollten nicht pendeln, wenn der Bewegungsvorgang gestartet wird, weil sonst die Gewichte während ihrer beschleunigten Bewegung gegen die Tischplatte stoßen können. Bei Problemen mit der Datenübertragung zuerst mit Hyperterminal prüfen, was an der Seriellen Schnittstelle für Daten ankommen. Durch Stromaus- und Einschalten der Schnittstellenelektronik und/oder neu Hochfahren des Computers können etwaige Probleme meistens gelöst werden. Kette und Gewichte sollten nicht zusammen montiert werden, da dann wegen der großen Gesamtmasse die Wucht an den Schaltern zu groß ist, und die Achse abgeschlagen werden kann. P.Knoll, Atwood´sche Fallmaschine 5 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Nr. 1 Atwood´sche Fallmaschine 6. Teil C Literatur • Siehe z.B. Bergmann-Schäfer Bd1. 7. • • • • • Kontrollfragen Wie erfolgt die idealisierte Bewegung ohne Reibung? Warum muss das Trägheitsmoment der Umlenkrolle berücksichtigt werden? Warum wird das Rauschen der Messdaten bei mehrmaligen Differenzieren immer größer? Wie würde sich eine geschwindigkeitsabhängige Reibung auswirken? Warum unterscheidet sich die fallende Kette signifikant von der Bewegung der beiden Massen, welche mit einem masselosen Faden verbunden sind? 8. Grundlagen 8.1. Einfache Bewegungen Die Bewegungen von Körpern entstehen durch das Zusammenspiel von folgenden r r physikalischen Größen: Kräften ( F ), Massen (M), Ort ( x )und Zeit (t). Weitere Größen wie r r r r ∂x = Mx& = Mv ) oder der Energieinhalt (potentielle und zum Beispiel der Impuls ( p = M ∂t kinetische) können daraus abgeleitet werden. Die physikalischen Gesetzmäßigkeiten, die nun zwischen diesen Größen wirken, wurden von Newton durch Beobachtung herausgefunden. Insbesondere ist dabei die Kraft als die Änderung des Bewegungszustandes einer Masse erkannt worden. Die Newton'schen Axiome lauten: 1. Jeder Massepunkt verharrt im Zustand der Ruhe oder der gleichförmigen Bewegung auf geradliniger Bahn solange keine Kräfte auf ihn einwirken. r 2. Definition der Kraft: Kraft ist die Ursache einer Impulsänderung (Beschleunigung ( b )). 3. actio = reactio: Jede Kraft erzeugt eine gleich große Gegenkraft. Diese mit Worten definierten Gesetze lassen sich etwas kompakter mathematisch formulieren. Die beiden ersten Gesetze ergeben die bekannte Beziehung: r r r r ∂pr r r r r ∂2 x ∂x & & & F= = p = Mb + Mv = M 2 + M = M&x& + M& x& . ∂t ∂t ∂t Dabei wurde gleich von der Vektorschreibweise Gebrauch gemacht. Bei konstanter Masse trägt nur mehr der Term mit der Beschleunigung bei. P.Knoll, Atwood´sche Fallmaschine 6 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I r r Das 3. Newton'sche Axiom, dass es zu jeder Kraft auch eine Gegenkraft gibt, also Fi = − F j , führt zur wichtigen Beziehung, dass bei Berücksichtigung sämtlicher Kräfte offenbar gilt: r ∑F i = 0. i Solche Systeme, wo es keine mehr nach außen gerichteten Kräfte gibt, nennt man abgeschlossene Systeme. Diese beiden mathematischen Ausdrücke bilden die Grundlagen für die Behandlung sämtlicher Bewegungsprobleme. Wählen wir als einfachen Fall eine konstante Masse M auf die eine zeitlich und örtlich konstante Kraft F in Richtung x wirken soll. Da hier ein streng eindimensionales Problem vorliegt, können wir auf die r Vektorschreibweise verzichten. Aus ∑ Fi = 0 folgt, dass es eine gleich große Gegenkraft i r r geben muss. Dies ist die sogenannte Trägheitskraft, welche nach F = M&x& für die Änderung des Bewegungszustandes verantwortlich ist. Wir erhalten direkt die Bewegungsgleichung: F − M&x& = 0 . Durch Lösen dieser Differentialgleichung erhalten wir sämtliche Zusammenhänge zwischen Weg, Zeit, Geschwindigkeit und Beschleunigung: b = &x& = F = const. M bzw. durch Integrieren: t t t0 t0 v (t ) = x& = ∫ &x&dt = ∫ F F (t − t0 ) + v0 . dt = M M Besonderer Augenmerk ist hier auf die Integrationsgrenzen und die Integrationskonstante zu legen, da diese die entsprechenden Randbedingungen festlegen. In unserem Fall wurde ganz allgemein als Randbedingung festgelegt, dass zur Zeit t0 die Geschwindigkeit v0 vorliegen soll. Durch weiteres Integrieren erhält man: t t F F (t − t0 )2 − F t0 (t − t0 ) + v0 (t − t0 ) . s (t ) = s0 + ∫ v (t )dt = s0 + ∫ (t − t0 ) + v0 dt = s0 + 2M M M t0 t0 Im besonderen Fall der Randbedingungen, dass t0=0, s0=0 und v0=0 sind, erhalten wir die bekannte Gesetzmäßigkeit der gleichförmig beschleunigten Bewegung: s (t ) = F 2 1 2 t = bt . 2M 2 Bis jetzt wurden nur die Abhängigkeiten gegenüber der Zeit angegeben. Von allen anderen möglichen Beziehungen soll lediglich noch die Frage geklärt werden, welche Geschwindigkeit liegt an welchem Ort vor. Dies erhält man durch Elimination der Zeit, welche durch den Weg ausgedrückt werden kann. Wir gehen von den einfachen P.Knoll, Atwood´sche Fallmaschine 7 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Randbedingungen aus und erhalten: v( s) = F F t= M M 2 Ms = F 2 Fs = 2bs . M Nachteil der hier verwendeten Methode, aus den Kräftegleichungen zu Bewegungsgleichungen zu kommen, ist, dass in komplexeren Systemen nicht immer alle Kräfte leicht zu erkennen sind und dadurch leicht Fehler entstehen. Deswegen wurden weitere Verfahren entwickelt, welche von der kinetischen und potentiellen Energie eines Systems ausgehen, welche oft einfacher zu erkennen sind. Der Vollständigkeit halber sollen sie hier kurz angeführt werden. Das Lagrange Verfahren: Aus der kinetischen Gesamtenergie eines Systems T und der gesamten potentiellen Energie V r r wird die Lagrange-Funktion L( x , x& ) = T − V gebildet, welche als Variablen den generalisierten Ort und seine zeitliche Ableitung beinhaltet. Die Bewegungsgleichungen ∂ ∂L ∂L erhält man dann nach folgender Vorschrift: − = 0. ∂t ∂x& ∂x In unserem vorigen Beispiel der einfachen gleichförmigen Beschleunigung lautet die 1 Lagrange-Funktion: L( x, x& ) = Mx& 2 + Fx und man erhält als Bewegungsgleichung: 2 M&x& − F = 0 . Hamilton Formulismus: Hier geht man von der Gesamtenergie eines Systems aus, welche durch generalisierten Ort r r und Impuls in Form der Hamiltonfunktion H ( x , p ) = T + V angegeben wird. Die r ∂H Bewegungsgleichung erhält man dann nach folgender Vorschrift: p& = − r zusammen mit ∂x r ∂H x& = r . Dieser Formalismus leitet bereits zur quantenmechanischen Behandlung über. ∂p In unserem vorigen Beispiel der einfachen gleichförmigen Beschleunigung lautet die 1 p2 Hamilton-Funktion: H ( x, p ) = Mx& 2 − Fx = − Fx . Als Bewegungsgleichungen erhält 2 2M p . Daraus erhält man wiederum die bereits bekannte man: p& = F und x& = M Bewegungsgleichung als Differentialgleichung 2. Ordnung in x: M&x& = F . 8.2. Lineare Bewegungen und Rotationen Die Mechanik rotierender Körper wird meist als wesentlich schwieriger empfunden. Sind dann noch rotierende Teile mit linear bewegten verbunden, wie dies bei den meisten mechanischen Maschinen der Fall ist, treten oft ungeahnte Schwierigkeiten auf. Die rollende Kugel ist ein einfaches Beispiel einer Rotationsbewegung (die der Kugel), welche mit einer linearen Bewegung (die des Massenschwerpunktes) verkoppelt ist, ebenso wie die Atwood´sche Fallmaschine. Wir wollen zuerst ein paar einfache Gesetzmäßigkeiten von rotierenden Massepunkten herleiten, und dann das Problem der Verkopplung mit linearen Bewegungen an Beispielen behandeln. P.Knoll, Atwood´sche Fallmaschine 8 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I 8.2.1. Mechanik rotierender starrer Körper r r Gehen wir von dem Gesetz F = M&x& aus, welches aus den Newton'schen Axiomen gewonnen r r wurde. Für mehrere Massepunkte lässt es sich erweitern zu: ∑ Fi − M&x&i = 0 . Rotationen sind i nun dadurch charakterisiert, dass dabei alle Punkte auf einer Geraden, der Drehachse, unverändert bleiben. Wir wählen nun einen Punkt auf der Drehachse als Bezugspunkt und r betrachten für alle i Massepunkte den Ortsvektor ri bezüglich dieses Bezugspunktes. Wir r erweitern die letzte Gleichung indem wir mit den Vekoren ri von links das Vektorprodukt r r r r r r r r r r r bilden und erhalten: r × F − M &x& = 0 = r × F − r × M &x& = r × F − r × p& . Dabei ∑ ( i i i i ) ∑ i i i i i ∑ i i i i i i i r r r r r r wird die Größe Ti = ri × Fi das Drehmoment und li = ri × pi der Drehimpuls des i-ten Massepunktes genannt. Damit haben wir bereits eine Formulierung des Newton'schen r& r Gesetzes für Rotationen gefunden: ∑ Ti = ∑ li . Weiters ist es zweckmäßig bei Rotationen i i anstelle der Ortskoordinate eine Winkelkoordinate einzuführen, welche entsprechend des Drehsinnes (Rechtssystem) ebenfalls ein Vektor ist. Für eine infinitesimale Verschiebung r r r r gilt: dx = dϕ × r + dr . Für Winkelgeschwindigkeit und Winkelbeschleunigung des i-ten r r r r r r r r r r r r r r r Massepunktes erhält man: v = x& = ϕ& × r + r& = ω × r + r& und b = &x& = ω& × r + ω × r& + &r& . i i i i i i i i i i i i i i i Damit kann man auf reine Winkelgrößen transformieren und erhält für den Drehimpuls: r r r r r r r r r r tr li = ri × pi = ri × M i vi = M i ri × ω i × ri + M i ri × r&i = I iω i + 0 . Dabei wurde aus dem etwas komplizierten Ausdruck mit dem doppelten Kreuzprodukt der Vektor der Winkelgeschwindigkeit herausgezogen, wofür ein Tensor 2. Stufe eingeführt werden musste. Dieser Tensor wird Trägheitsmoment genannt und kann durch komponentenweisen Vergleich bestimmt werden: ri 2,y + ri 2,z t I i = M i − ri , x ri , y −r r i,x i ,z − ri , x ri , y r +r − ri , y ri , z 2 i,x 2 i ,z − ri , x ri ,z − ri , y ri , z . ri 2,x + ri 2,y Dieser Tensor des Trägheitsmomentes ist symmetrisch und ein wichtiges Hilfsmittel bei der Beschreibung von Drehbewegungen. Wir betrachten nun wiederum die eigentliche Bewegungsgleichung und transformieren den Term mit der Drehimpulsänderung ebenfalls r& r r r r r r t r t& r r r auf Winkelgrößen: l = r × M &x& = r × M ω& × r + r × M ω × r& = I ω& + I ω . Damit erhalten i i i i i i i i i i i i i i i wir bereits die Bewegungsgleichung ausgedrückt in Winkelgrößen: ( ) ( ) r r& r t r t& r r t r t& r r r r r 0 = ∑ ri × Fi − ri × p& i = ∑ Ti − li = ∑ Ti − I iω& i − I ω i = ∑ Ti − I iϕ&&i − I ϕ& i . i i i i Wichtig ist zu betonen, dass bis jetzt nur mathematische Umformungen auf Winkeländerungen durchgeführt wurden, und daher auch in dieser Form beliebige Bewegungen beschrieben werden können. Dabei ist die Wahl des Bezugspunktes auf der Drehachse nicht unbedingt notwendig. Von Vorteil ist diese Art der Beschreibung allerdings bei reinen Rotationen, da dann alle Massepunkte die gleiche Winkelgeschwindigkeit P.Knoll, Atwood´sche Fallmaschine 9 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I besitzen. Wählt man dann den Bezugspunkt auf der Drehachse und betrachtet Drehungen um den Schwerpunkt, dann werden die Gleichungen besonders einfach und auch der Tensor des Trägheitsmomentes wird während dieser reinen Rotation eine recht einfach zu berechnende konstante Größe. Interpretieren wir die Änderung des Drehimpulses ebenfalls als Drehmoment, so erhält man noch folgende Gleichung: r ∑T j = 0. j Diese letzten beiden Gleichungen stellen die Newton'schen Axiome in Winkelgrößen dar. Damit lässt sich jedes mechanische Problem genauso lösen. Für reine Rotationen, wo alle Massepunkte die gleiche Winkelgeschwindigkeit besitzen, vereinfachen sie sich zu: ( ) r tr r r t r tr r tr 0 = ∑ Ti − I iϕ&&i = ∑ Ti − ϕ&&∑ I i = T − I ϕ&& = T − I ω& = 0 . i i i Dabei kann bezogen auf eine Achse ein Gesamtträgheitsmoment des Körpers angegeben werden, welches konstant ist. 8.2.2. Beispiel: Rotierender Massepunkt Als einfaches Beispiel betrachten wir einen mit konstanter Winkelgeschwindigkeit ω im festen Abstand r zur Drehachse rotierenden Punkt mit der Masse M. Zunächst behandeln wir das Problem im herkömmlichen kartesischen Koordinatensystem und den darauf formulierten Newton'schen Gesetzen. Die rotierende Bewegung soll in der x-y-Ebene stattfinden und wir erhalten für Ortsvektor, Geschwindigkeit und Beschleunigung: − rω 2 cos ωt r cos ωt − rω sin ωt r r r x = r sin ωt , v = rω cos ωt und b = − rω 2 sin ωt . 0 0 0 Aus den Newton'schen Axiomen folgt ein Kraftvektor, welcher für die Beschleunigung verantwortlich sein muss: − rω 2 cos ωt F r r x F = Fy = Mb = M − rω 2 sin ωt . F 0 z Diese Kraft ist auf die Drehachse gerichtet und wird von der starren Verbindung des Massepunktes zur Drehachse aufgenommen. Sie wird Zentripedalkraft genannt. Der Betrag r der Kraft ist F = F = Mrω 2 . Die entsprechend gegengesetzte Kraft ist die Trägheitskraft und weist vom Drehmittelpunkt weg, ist gleich groß und ist die allgemein bekannte Fliehkraft. Diese auftretenden Kräfte, die nicht a priori vorgegeben wurden und erst zwanghaft entstanden sind um einen bestimmten Bewegungsvorgang (Rotation) zu ermöglichen, werden Zwangskräfte genannt. Eine weitere Zwangskraft, die Corioliskraft, tritt bei diesem einfachen Problem nicht auf, weil der Abstand zur Drehachse konstant ist. Wichtig ist anzumerken, dass der Ortsvektor zwar den augenblicklichen Ort des P.Knoll, Atwood´sche Fallmaschine 10 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Massepunktes beschreibt, aber sein Betrag nicht dem zurückgelegten Weg entspricht. Diesen erhalten wir als Integration über den Betrag der Geschwindigkeit: t t t r Die Integrationss (t ) = ∫ v (t ) dt = ∫ r 2ω 2 sin 2 ωt + r 2ω 2 cos 2 ωt dt = ∫ rωdt = rωt . 0 0 0 konstante wurde hier mit Null angenommen. In gleicher Weise lässt sich dieses Problem mit Hilfe der vorhin abgeleiteten Gesetze für Winkeländerungen beschreiben. Der Massepunkt rotiert mit konstanter Winkelgeschwindigkeit und man erhält: I T r x t v xx T = T y = I ω& = I xy I T z xz I xy I yy I yz I xz 0 I yz 0 . I zz ω& = 0 Demnach handelt es sich um eine drehmomentfreie gleichförmige Rotation in Analogie zur kräftefreien gleichförmigen linearen Bewegung. Hier sieht man bereits den Vorteil der Verwendung der Gleichungen in Winkelgrößen, da die Beschreibung wesentlich einfacher ist. Allerdings nur solange, als man nur in dem Verhalten der makroskopischen Drehbewegungen interessiert ist. Zwangskräfte, wie z.B. die Fliehkraft sind hier nicht explizit ersichtlich. Etwas tieferen Einblick erhält man noch, wenn nun die einzelnen Drehgrößen wie Drehmomente, Drehimpulse und Trägheitsmomente auch tatsächlich ausgerechnet werden. In unserem Fall der einfachen Rotation in einer Ebene sind nur die zKomponenten von Bedeutung. Wir berechnen: − rω 2 cos ωt 0 r cos ωt r v r 2 0 T = r × F = r sin ωt × M − rω sin ωt = M 2 2 2 2 0 0 − r ω cos ωt sin ωt + r ω sin ωt cos ωt = 0 , ry2 + rz2 t I = M − rx ry −r r x z − rx ry rx2 + rz2 − ry rz − rx rz − r 2 sin ωt cos ωt 0 r 2 sin 2 ωt 2 − ry rz = M − r sin ωt cos ωt r 2 cos 2 ωt 0 . rx2 + ry2 0 0 r 2 Der Trägheitstensor besteht nur aus der zz-Komponente als zeitlich stabile Größe, während die anderen Komponenten nur zeitweise auftreten und für den Bewegungsvorgang nicht maßgebend sind. Das Trägheitsmoment eines einzelnen Massepunktes ist daher Mr2, wobei r den Normalabstand zur Drehachse bedeutet. Die Kreisfrequenz hat nur eine z-Komponente, da nur der Winkel des Massepunktes in der x-y-Ebene sich ändert: 0 ω = 0 , mit ϕ = ωt + ϕ 0 . ω = ϕ& r Die weiteren Größen ergeben sich zu: P.Knoll, Atwood´sche Fallmaschine 11 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I r cos ωt − rω sin ωt 0 r r r r tr r l = r × p = r × Mv = r sin ωt × M rω cos ωt = M 0 = I ω . 0 r 2ω 0 Zur Vereinfachung ist in nachstehender Tabelle nochmals die Analogie zwischen den einzelnen Größen angegeben: lineare Bewegung r x , Ort r r v = x& , Geschwindigkeit r r b = &x& , Beschleunigung r ϕ , Winkel r r ω = ϕ& , Rotation Winkelgeschwindigkeit r ϕ&& , Winkelbeschleunigung Zusammenhang r r r r dx = dϕ × r + dr r r r r v = ω × r + r& , r r r r r r b = ω& × r + ω × r& + &r& r F , Kraft r T , Drehmoment r r r T =r×F M , Masse t I , Trägheitsmoment r r r tr Mr × ω × r = I ω ry2 + rz2 M − rx ry −r r x z − rx ry r +r − ry rz 2 x 2 z − rx rz − ry rz rx2 + ry2 r p , Impuls bzw. in einfachen Systemen 2 wo I diagonal: I αα = M rα r l , Drehimpuls r r r F = Mb = p& r r& t& r t r T = l = I ω + I ω& r ∑F i r ∑T =0 i i r r r r r l = r × p = r × Mv = r r tr r = r × Mω × r = I ω =0 i 8.2.3. Beispiel Atwood´sche Fallmaschine Die Atwood'sche Fallmaschine (siehe Abb.1) benützt zwei Gewichtsmassen M1 < M2, welche durch einen Faden über eine Rolle miteinander verbunden sind. Es wirkt nur mehr die Differenz der beiden Gewichte als antreibende Kraft, während die träge Masse als die Summe beider Gewichtsmassen auftritt. Wird der Faden und das Rad als masselos betrachtet erhält man folgende einfache Bewegungsgleichung: gM 2 − gM 1 = (M 1 + M 2 )b , woraus sofort folgt: b = &x& = g M 2 − M1 . M1 + M 2 P.Knoll, Atwood´sche Fallmaschine 12 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Zunächst berücksichtigen wir die Masse Mr der Umlenkrolle, was zu einem zusätzlichen trägen Verhalten über das Trägheitsmoment der Rolle Ir führt. Weiters ist die Winkeländerung dϕ der Rolle mit der Ortsänderung dx=rdϕ beider Massen gekoppelt. Wir stellen wiederum die Kräftegleichung auf, indem wir berücksichtigen, dass die Rolle ein Drehmoment der Trägheit: Tr = rFr = I rϕ&& = Ir &x& r ausübt. Damit erhalten wir: gM 2 − gM 1 = (M 1 + M 2 )b + Ir b, r2 und somit als Beschleunigung: b = &x& = g M 2 − M1 M1 + M 2 + Ir r2 . Ist die Rolle als Zylinderscheibe anzusehen, so ist ihr Trägheitsmoment bezüglich der M rr2 Zylinderachse I r = und wir erhalten: 2 b = &x& = g M 2 − M1 . Mr M1 + M 2 + 2 Zuletzt soll nur noch kurz der Fall eines nicht masselosen Fadens diskutiert und die dabei auftretende Bewegungsgleichung angeschrieben werden. Zunächst erhöht sich das Trägheitsmoment der Umlenkrolle, da noch zusätzlich die Masse des Fadens, der über die obere Hälfte des Rades geleitet ist, dazugezählt werden muss. Wir bezeichnen mit I dieses erhöhte Trägheitsmoment. Weiters trägt mit der Länge l2(0)+x der Faden an der Masse M2 mit seinem Gewicht zur antreibenden Kraft bei, während der Faden an M1 mit l1(0)-x=l0-l2(0)-x die antreibende Kraft vermindert. Zusätzliche erhöht die Länge des frei hängenden Fadens l0 die wirkende träge Masse. Nehmen wir eine Masse des Fadens Mf=ρfl, welche proportional zu seiner Länge l ist, so erhalten wir als Bewegungsgleichung: gM 2 + gρ f (l 2 (0) + x ) − gM 1 − gρ f (l0 − l2 (0) − x ) = (M 1 + M 2 + ρ f l0 )&x& + Ir &x& . r2 Etwas übersichtlicher lautet die Differentialgleichung: I M 1 + M 2 + ρ f l0 + 2 &x& + 2 gρ f x = g (M 2 − M 1 + ρ f (2l2 (0) − l0 )) . r Diese kann durch zweifache Integration gelöst werden: l2 M 1 + M 2 + ρ f l0 + x ∫ ∫ g (M l2 ( 0 ) l2 ( 0 ) 2 I r2 − M 1 + ρ f (2l2 (0) − l0 )) − 2 gρ f x P.Knoll, Atwood´sche Fallmaschine t t d 2 x = ∫ ∫ d 2t . 0 0 13 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Die erste Integration liefert: l2 ∫ M 1 + M 2 + ρ f l0 + − 2 gρ f l2 ( 0 ) I t r 2 ln g (M 2 − M 1 + ρ f (2l2 (0) − l0 )) − 2 gρ f x dx = tdt . ∫0 g (M 2 − M 1 − ρ f l0 ) Nach der 2. Integration erhält man: I M 1 + M 2 + ρ f l0 + 2 g (M 2 − M 1 − ρ f l0 ) t2 l2 r ( ) X X X − = ln l2 ( 0 ) 2 (2 gρ f )2 mit X = g (M 2 − M 1 + ρ f (2l 2 (0) − l0 )) − 2 gρ f x g (M 2 − M 1 − ρ f l0 ) . Für M1=M2=0 stellt dies das Ergebnis einer über eine Rolle hinunterfallenden Kette dar. Das Trägheitsmoment von Rad und Faden ergibt sich zu: I = Mr r2 + πrρ f r 2 . 2 Daraus ergibt sich M I = r + π rρ f . 2 r 2 Für eine weitere Analyse des massebehafteten Fadens empfiehlt sich die numerische Behandlung am Computer. Analyse des Bewegungsvorganges unter Berücksichtigung von Reibung Wir gehen von der Atwood’schen Fallmaschine aus, deren Weg-Zeit-Diagramm in den Computer eingelesen werden kann und dort zur weiteren Analyse zur Verfügung steht. Die beiden Masse wurden dabei in diesem Beispiel zu M1=0,80 kg und M2=0,87 kg bestimmt. Die Masse der drehenden Scheibe soll 0,13 kg betragen. Dies ergibt eine theoretische M 2 − M1 0,87 − 0,8 Beschleunigung von b = g = 9,81 m/s2 = 0,396 m/s2. Die Mr 0 , 8 + 0 , 87 + 0 , 065 M1 + M 2 + 2 Randbedingungen werden im Experiment so gesetzt, dass am Ort s0 = 0 m mit der Anfangsgeschwindigkeit v0 = 0 m/s der Bewegungsvorgang gestartet wird. Allerdings kann die Datenerfassung von Ort und Zeit erst etwas verspätet mit t0 = -0,5 s gestartet werden. Theoretisch erwartet man daher folgende Abhängigkeit des Weges von der Zeit: s (t ) = b (t − t0 )2 − bt0 (t − t0 ) = b t 2 − 2bt0t + 3b t0 2 = 0,198 t2 + 0,396 t + 0,1485 m. 2 2 2 Dieser theoretisch erwartete Verlauf ist in Abb.2 zusammen mit dem tatsächlich gemessenen Werten verglichen. P.Knoll, Atwood´sche Fallmaschine 14 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I 8 2.4 Weg s [m] 5 2.0 Y =0.1485+0.396 X+0.198 X 2 4 3 2 Y =0.02734+0.11245 X+0.10874 X 1 2 Geschwindigkeit v [m/s] 6 experimentell theoretisch 2.2 experimentell theoretisch 7 1.8 1.6 1.4 Y =0.198+0.396 X 1.2 1.0 0.8 Y =0.11231+0.21758 X 0.6 0.4 0.2 0 0.0 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 Zeit t [s] Zeit t [s] Abb.2: Weg-Zeit Diagramm Abb.3: Geschwindigkeits-Zeit-Diagramm Dabei treten erhebliche Abweichungen zwischen dem theoretisch erwarteten Verhalten und den tatsächlichen Messwerten auf. Offenbar ist die tatsächliche Beschleunigung etwa nur die Hälfte. Um die Ursache dafür etwas näher zu ergründen, empfiehlt es sich die weiteren Zusammenhänge anzuschauen, wie sie in den Abb.3 bis Abb.6 dargestellt sind. Dabei erhält man Geschwindigkeit und Beschleunigung aus den experimentellen Werten durch numerisches Differenzieren. Zu beachten ist, dass durch die experimentellen Ungenauigkeiten (ebenso wie durch mangelnde numerische Genauigkeit in der Datenerfassung) das eigentliche Messsignal durch starke Schwankungen (Rauschen) überlagert ist, was vor allem bei den höheren Ableitungen besonders stark zu tragen kommt. 0.50 0.50 experimentell theoretisch 0.45 Y =0.396 Y =0.396 0.40 2 Beschleunigung b [m/s ] 2 Beschleunigung b [m/s ] 0.40 0.35 0.30 0.25 0.20 0.15 Y =0.21836-0.00114 X 0.10 experimentell theoretisch 0.45 0.35 0.30 0.25 0.20 Y =0.221-0.01444 X 0.15 0.10 0.05 0.05 0.00 0.00 0.0 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 0.2 0.4 Zeit t [s] Abb.4: Beschleunigungs-Zeit-Diagramm 0.50 0.45 1.0 1.0 0.9 Y =0.396 0.8 0.35 0.7 0.30 0.6 Kraft F [N] 2 0.8 Abb.5: Beschleunigungs-Weg-Diagramm experimentell theoretisch 0.40 Beschleunigung b [m/s ] 0.6 Weg s [m] 0.25 0.20 experimentell theoretisch Y =0.687 0.5 0.4 0.3 0.15 Y =0.21955-0.00703 X 0.10 Y =0.38092-0.01221 X 0.2 0.05 0.1 0.00 0.0 0.2 0.3 0.4 0.5 Geschwindigkeit v [m/s] Abb.6: Beschleunigungs-GeschwindigkeitsDiagramm P.Knoll, Atwood´sche Fallmaschine 0.2 0.3 0.4 0.5 Geschwindigkeit v [m/s] Abb.7: Kraft-Geschwindigkeits-Diagramm 15 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Von besonderer Bedeutung sind hierbei vor allem die verschiedenen BeschleunigungsDiagramme, da sie den Hinweis liefern, ob tatsächlich die angenommene gleichförmig beschleunigte Bewegung vorliegt. Leider ist hier jedoch, bedingt durch die zweiten Ableitungen, die Genauigkeit sehr stark eingeschränkt. Dies ist in unserem Beispiel durch die zu geringe numerische Auflösung der Ortsdaten bedingt. Man erkennt eine in Zeit, Ort und Geschwindigkeit einigermaßen konstante Beschleunigung mit leichter Tendenz zur Abnahme. Ob diese Abnahme nun wirklich durch eine orts-, zeit- oder geschwindigkeitsabhänge Größe verursacht wurde lässt sich aus diesen Diagrammen alleine jedoch nicht verifizieren (selbst bei besserer Genauigkeit der Messdaten nicht). Erst wenn der Versuch unter veränderten Randbedingungen (Wiederholung zu anderer Zeit t0, Start des Bewegungsvorganges an einem anderen Ort s0 und starten mit einer anderen Anfangsgeschwindigkeit v0) durchgeführt wird, könnte man erkennen, dass der Bewegungsablauf unabhängig vom gewählten Zeitpunkt oder dem Anfangsort ist, jedoch nicht von der gewählten Anfangsgeschwindigkeit. Somit muss noch eine weitere Kraft vorhanden sein, welche leicht von der Geschwindigkeit abhängt. Die für die Änderung des Bewegungszustandes verantwortliche Gesamtkraft erhalten wir, wenn wir die experimentell bestimmte Beschleunigung mit der gesamt wirkenden trägen Masse multiplizieren. In M unserem Beispiel ist die gesamte träge Masse M T = M 1 + M 2 + r = 1,735 kg. Damit 2 erhalten wir das in Abb.7 dargestellte Verhalten der gesamten wirkenden Kraft als Funktion der Geschwindigkeit. Die Diskrepanz zwischen der aus der Massendifferenz bisher berechneten antreibenden Kraft und der tatsächlich wirkenden Kraft wird als die zusätzliche Reibungskraft FR = 0,306 (±0,015) + 0,01(±0,04) v ermittelt. Dabei ist die Geschwindigkeit in m/s einzusetzen und die Kraft erhält man in Newton. Die in Klammer angegebenen Werte geben den Genauigkeitsbereich der einzelnen Parameter an, wie sie bessere Fitroutinen aus der Streuung der Messwerte als Standardabweichungen berechnen. Demnach liegt eine auf ca. 3% genau bestimmte geschwindigkeitsunabhängige Reibungskraft von 0,3 N vor, während die Geschwindigkeitsabhängigkeit durch einen Koeffizienten zwischen –0,03 und +0,05 Ns/m beschrieben wird. Ob dies den tatsächlichen Verhältnissen entspricht lässt sich in diesem Fall sehr leicht nachprüfen, da in den vorigen Abbildungen keine echten Messdaten verwendet wurden sondern eine Simulation, welche jedoch auch die Streuung der Messdaten und die geringe numerische Auflösung berücksichtigt. Diese Simulation wurde mit eine Reibungskraft FR = 0,3 + 0,03 v durchgeführt, was mit den in unserer Analyse ermittelten Wertbereichen übereinstimmt. Eine Verbesserung der beschriebenen Analyse müsste in einer Erhöhung der Genauigkeit der Ortsdaten ansetzen, um so zu verlässlicheren Beschleunigungswerten zu kommen. Dann ist auch die Durchführung mit geänderten Anfangsbedingungen sinnvoll, welche zur Charakterisierung der auftretenden Kräfte notwendig ist. Zwar scheint auch die künstliche Glättung (Smoothing) der Geschwindigkeitskurve eine effektive Alternative darzustellen, allerdings ist dies mit einer künstlichen Manipulation und Veränderung der Messdaten verbunden, wodurch die statistische Aussagekraft einer Nachfolgenden Fit-Methode verloren geht bzw. stark beeinträchtigt wird. Besser ist hier geschickte numerische Differenziermethoden anzuwenden, welche ein breites Datenintervall betrachten. Allerdings wird dann die Information an den Datenrändern (Beginn und Ende) stark eingeengt, wodurch ebenfalls wieder keine gute statistische Genauigkeit über den Anstieg der Fit-Kurve erzielbar ist. Letztlich gilt wie immer der Grundsatz, daß Information, welche nicht schon ursprünglich in den Messdaten vorhanden ist, auch nicht mit noch so hohen Aufwand im „smoothing“ oder „fitten“ herbeigezaubert werden kann. 9. Experimentpate: P.Knoll P.Knoll, Atwood´sche Fallmaschine 16