Newtonsche Mechanik - Universität Innsbruck
Werbung

Die Newtonsche Mechanik
schülergerecht dargestellt für den AHS-Unterricht
als ein Musterbeispiel für das Modelldenken der Physik
Diplomarbeit
zur Erlangung des Magistergrades
an der Naturwissenschaftlichen Fakultät
der Leopold-Franzens-Universität Innsbruck
eingereicht bei
Herrn A. Univ. – Prof. Dr.
Christoph LEUBNER
Institut für Theoretische Physik
von
Karin LENZ
Innsbruck, April 2002
Danksagung
Ich möchte mich bei meinen Eltern bedanken, deren großzügige Unterstützung mir dieses
Studium erst ermöglichte, und die mich mit viel Geduld und Verständnis begleitet haben.
Ein besonderer Dank gilt auch meinem Betreuer Herrn Christoph Leubner, der stets Zeit für
mich hatte, wenn ich seine Hilfe benötigte und mir zahlreiche wertvolle Ratschläge gab.
Recht herzlich bedanken möchte ich mich ebenso bei meinem Freund Thomas, meiner
Schwester Andrea, meinem Bruder Hannes, meinen Freunden Elmar, Lisi, Bettina, Tanja
und Martina, die mir in kleinen Krisensituationen immer wieder beigestanden sind.
2
Inhaltsverzeichnis
1. Motivation und Zielsetzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
2. Schulbuchanalyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.1. Schreiner – Physik 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.2. Jaros, Nussbaumer, Kunze – Basiswissen 1 . . . . . . . . . . . . . . . . . . . . . . . .
11
2.3. Sexl, Raab, Steeruwitz – Physik 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.4. Kraker, Paill – Physik 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2.5. Lepold – Physik ,Band 1 HTL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.6. Resumée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
3. Die Newtonsche Mechanik und das Modelldenken in der Physik
17
3.1. Welche Klasse von realen Vorgängen soll mit der Newtonsche Mechanik
verstanden werden? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
3.2. Wie modelliert die Newtonsche Mechanik äußere Einwirkungen auf reale
Objekte? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.3. Wie modelliert die Newtonsche Mechanik reale Objekte? . . . . . . . . . . . . . .
27
3.4. Die Modellbausteine „Bezugssystem“ und „Bahnkurve“ . . . . . . . . . . . . . . .
30
3.5. Wie modelliert die Newtonsche Mechanik die Reaktion von realen Objekten auf Einwirkungen aus deren Umgebung? . . . . . . . . . . . . . . . . . .
36
3.6. Die Verbindung der Modellbausteine durch die Newtonschen Axiome . . . .
42
3.7. Anwendung: Die Newtonsche Gravitationstheorie . . . . . . . . . . . . . . . . . . . .
48
3.8. „Fliehkraft“ in der Newtonschen Mechanik? . . . . . . . . . . . . . . . . . . . . . . . . .
52
3.9. Anhang: Die prinzipielle Berechnung der Bahnkurve eines Massenpunktes
aus den Kräften und den Startbedingungen . . . . . . . . . . . . . . . . . . . . . . . .
65
4. Literaturverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
5. Verzeichnis der Bildquellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
3
1. Motivation und Zielsetzung
Die Präambeln der Physiklehrpläne schreiben einerseits hehre Unterrichtsziele vor, aber
andererseits bleiben die meisten davon in der Unterrichtsrealität ziemlich kläglich auf der
Strecke. Die Vermittlung des Modelldenkens an die Schülerinnen und Schüler („Realwelt →
Modell → Modelleigenschaften → Realwelt“) ist eines dieser Unterrichtsziele, die von den
Lehrplänen unter „Bildungs- und Lehraufgabe des Unterrichtsfaches Physik“ gefordert, aber
kaum jemals erreicht werden. Zwar steht es so vorläufig erst im Unterstufenlehrplan, doch ist
zu erwarten, dass sich in den allgemeinen Grundsätzen des derzeit noch diskutierten neuen
Oberstufenlehrplanes ganz ähnliche Ziele finden werden. Denn auch im vorderhand noch
gültigen Oberstufenlehrplan aus dem Jahre 1985 steht es so zu lesen.
Halten wir uns dazu noch vor Augen, in wie vielen ganz verschiedenen Zusammenhängen, die mit Physik gar nichts zu tun haben, das „Modelldenken“ auf Schritt und Tritt in
der Lebenswelt der Schülerinnen und Schüler vorkommt, dann sollte der Physikunterricht
schon deshalb den verschiedenen Aspekten der „Modellbildung“ breiten Raum geben. Immerhin hat laut Lehrplan der Physikunterricht an die Vorkenntnisse und Vorerfahrungen der
Schülerinnen und Schüler anzuknüpfen, Bezüge zur Lebenswelt herzustellen, und physikalisches Wissen in größere Zusammenhänge einzubetten. Um diesen Forderungen des Lehrplanes gerecht zu werden, lässt sich in meinen Augen kaum ein dankbareres Thema als das
„Modelldenken“ finden. Mein Ziel in dieser Arbeit ist nur die ausführliche Diskussion eines
wichtigen Unterkapitels des Modelldenkens in der Physik. Aus diesem Grund vermeide ich
hier eine all zu große Abschweifung von meinem eigentlichen Thema, indem ich für eine Anleitung zur Heranführung der Schülerinnen und Schüler an das „Modelldenken“ ganz allgemein auf [LEUBNER 2002] verweise.
Um, so wie ich es hier vorhabe, die Newtonsche Mechanik schülergerecht als ein typisches Modell der Physik darzustellen, ist es jedoch unerlässlich, den Modellbegriff der
Schulbücher, der fast ausschließlich1 viel zu eng gefasst ist, wesentlich zu erweitern. In den
Schulbüchern bezeichnet Modell lediglich die Ersetzung eines einzelnen realen Objektes
durch ein einfacheres Anderes, eben das Modell dieses einzelnen Objektes.
Diese Art von Modellen sind beispielsweise auch in Büros von Architekten zu finden.
Dort wird für ein zu errichtendes Gebäude ein stark verkleinertes Sperrholz- oder Hart1
Eine Ausnahme bildet nur das Kapitel „Physikalische Modelle“ im Schulbuch „Basiswissen 1“ von A. Jaros, A.
Nussbaumer, P. Nussbaumer, das aber in seiner Informationsdichte von Schülerinnen und Schülern diesen Alters
wohl nicht verstanden werden kann.
4
schaummodell angefertigt. Nur anhand von Beispielen kann sich also der Bauherr das vom
Architekten vorgeschlagene Bauwerk sehr gut vorstellen: Das reale Einzelobjekt, zum Beispiel ein zu errichtendes Wohnhaus, ist auf dem Schreibtisch des Architekten durch etwas
viel einfacheres, das Sperrholzmodell, ersetzt worden. Die in den Schulbüchern ausschließlich eingeführten Modelle „Massenpunkt“, „Starrer Körper“, „Kristall“ sind ebenfalls von dieser
einfachen Art.
Um den Schülerinnen und Schülern gemäß der Lehrplanforderung das Modelldenken
der Physik in der Abfolge „Realwelt → Modell → Modelleigenschaften → Realwelt“ zu vermitteln, genügt dieser enge Begriff des Modells selbstverständlich nicht mehr. Denn schon gemäß dem ersten „Pfeil“ dieser Abfolge soll die ganze Vielfalt (eines bestimmten
Ausschnittes) der Realwelt in ein Modell gefasst werden! Die Vielfalt der Realwelt kommt
aber nicht durch das bloße Vorhandensein von realen Objekten (einzeln modelliert etwa
durch „Massenpunkte“, „Starre Köper“, oder vielleicht durch „Kristalle“) zustande, sondern
ebenso durch deren mannigfache gegenseitige Einwirkungen. Folglich müssen auch diese
Einwirkungen, genauso wie die Reaktionen der realen Objekte auf diese Einwirkungen, modelliert werden. Und die Newtonsche Mechanik, das Thema dieser Arbeit, ist gerade ein
schönes Beispiel für ein in sich geschlossenes Modell für die reale Reaktion von realen Objekten unter den realen Einwirkungen aus ihrer Umgebung. Ein anderes Beispiel für ein umfassendes Modell, das für manche Physikleistungskurse gerade noch geeignet sein könnte,
ist die Spezielle Relativitätstheorie. Diese ist ein Modell für Raum und Zeit mit einer geeigneten Anpassung der Mechanik (und der anderen Teilgebiete der Physik) an diese Eigenschaften von Raum und Zeit.
Offensichtlich ist eine solche Darstellung der Mechanik im 5. oder 6. Jahr der gymnasialen Oberstufe sehr anspruchsvoll. Daher ist die Überlegung, ob dadurch das Auffassungsvermögen von Schülerinnen und Schülern dieser Altersstufe nicht überfordert würde,
und dieser Stoff nicht besser in die 8. Schulstufe verlegt werden sollte, durchaus berechtigt.
Doch unabhängig davon, ob dafür die 5., 6., oder 8. Klasse gewählt wird, die (schülergerechte!) Darstellung muss sich in wesentlichen Punkten von der Darstellung in fast allen Schulbüchern verabschieden. Denn was die Schülerinnen und Schüler dort zu hören oder zu lesen
bekommen (vgl. Kapitel 2: „Schulbuchanalyse“), ist nicht dazu angetan, ihnen die Physik als
Ganzes vorzustellen, als eine zutiefst vernünftige Wissenschaft.
Um meine harschen Worte zu untermauern, möchte ich eine Geschichte erzählen,
die zwar erfunden ist, sich aber durchaus so zugetragen haben könnte. Die Hauptrolle darin
spielt eine besonders intelligente und physikinteressierte Schülerin - so wie man sie sich als
Physiklehrerin eben wünscht. Sie besucht eine achte Klasse AHS, und liest im Philosophieunterricht auf der ersten Seite des Büchleins von Robert Hofstetter [HOFSTETTER 1988,
S. 3], dass Formalwissenschaften auf einem Satz von Axiomen aufbauen. Axiome sind
5
grundlegende Behauptungen des Konstrukteurs eines vorliegenden Modells. Sie werden
zunächst einmal als vernünftig angenommen, müssen sich dann aber einer Brauchbarkeitsprüfung nach festzulegenden Kriterien stellen. Von solchen Axiomensystemen eines Modells
liest sie weiter, wird Widerspruchsfreiheit und Unabhängigkeit gefordert. Wie alle intelligenten jungen Leute hätte sie das Gelesene gerne von einigen konkreten Beispielen veranschaulicht gesehen. Doch leider finden sich in dem Büchlein keine. Da fällt ihr ein, dass ja im
Physikunterricht von den Newtonschen Axiomen der Mechanik die Rede war. Sie sucht nun
ihr Physikbuch von der 5. Klasse, um dort deren genauen Wortlaut nachzulesen und zu prüfen, ob sie die allgemeinen Forderungen an Axiomensysteme erfüllen. Nach einigem Blättern
findet sie [SEXL 1992, S. 33, S. 39]:
• 1. Axiom: „Ein Körper, auf den keine Kraft wirkt, verharrt im Zustand der Ruhe oder der
gleichförmigen Bewegung auf geradliniger Bahn.“
• 2. Axiom: „Kraft ist Masse mal Beschleunigung.“
• 3. Axiom: „Kräfte treten immer paarweise auf. Sie sind gleich groß, aber entgegengesetzt
gerichtet.“
Unsere intelligente Schülerin ist sich bewusst, dass die Widerspruchsfreiheit dieser Axiome
(aus den Axiomen darf nicht eine Aussage und gleichzeitig deren Verneinung abgeleitet
werden können) viel schwieriger nachzuweisen ist als deren Unabhängigkeit (kein Axiom
darf aus den anderen ableitbar sein). Zu Letzterer fällt ihr auch sofort auf, dass aus dem
zweiten Axiom für ein reales Objekt auf das, wie im ersten Axiom formuliert, keine Kraft wirkt,
„Masse mal Beschleunigung ist Null“ folgt. Aus der Mathematik weiß sie, dass das Produkt
von zwei Faktoren nur dann Null ist, wenn mindestens einer der beiden Faktoren Null ist. Da
die Masse eines realen Objektes nie Null ist, muss im Produkt „Masse mal Beschleunigung
ist Null“ also die Beschleunigung Null sein. Aus dem Physikunterricht erinnert sie sich aber,
dass die Geschwindigkeit eines realen Objektes konstant ist, wenn seine Beschleunigung
Null ist. Konstante Geschwindigkeit bedeutet aber gleichförmige Bewegung längs einer geraden Bahn. Folglich ist dieser Spezialfall des zweiten Axioms gerade das erste Axiom. Diese beiden Axiome sind also nicht voneinander unabhängig. Das erste Axiom ist vollkommen
überflüssig!
Unsere Schülerin ist nun vollkommen verwirrt. Einerseits weiß sie, dass die auf den
Newtonschen Axiomen basierende Mechanik eine überwältigend erfolgreiche physikalische
Theorie ist. Doch andererseits genügen deren aus dem Schulbuch sauber übernommenen
Axiome nicht einmal den elementarsten Grundforderungen an ein akzeptables Axiomensystem. Ist die Physik also eine im Grunde mehr zufällig funktionierende Pseudowissenschaft, die nicht einmal die simpelsten Regeln der Logik beherzigt? Leider müssen wir der
6
Schülerin darauf antworten, dass der Fehler nicht bei der Physik liegt, sondern bei den zahlreichen Schulbuchautoren, die die Newtonsche Mechanik noch immer nicht verstanden haben. Denn sonst würden sie nicht eine solch unsinnige Formulierung des ersten
Newtonschen Axioms in Druck gehen lassen!
Natürlich wird die Newtonsche Mechanik an unseren Universitäten seit langer Zeit
bestens verstanden. Es besteht somit auf akademischem Boden kein wie immer gearteter
Bedarf an einer Verbesserung der Grundlagen. Ich hoffe aber, mit meiner (erfundenen) Geschichte gezeigt zu haben, dass sehr wohl Bedarf an einer Verbesserung der Schulbücher und damit am Unterricht an vielen Schulen - besteht. Was Not tut, ist also eine schülergerechte Hinführung zur Newtonschen Mechanik. Und zwar soll dies in einer solchen Art und
Weise geschehen, dass den Schülerinnen und Schülern klar und nachhaltig deren Charakter
als typisches physikalisches Modell für das Verständnis der Reaktionen von realen Objekten
auf Einwirkungen aus ihrer Umgebung vor Augen geführt wird. Dabei soll diese Hinführung
durch die in der Fachphysik bei der Darstellung der Mechanik immer massiv verwendeten
Mathematik in keinster Weise behindert werden. Eine eben solche Darstellung ist mein Anliegen in dieser Arbeit.
Bevor ich jedoch damit beginne, möchte ich über eine genaue Schulbuchanalyse
aufzeigen, welche Fehler und Unterlassungen am häufigsten begangen werden. So sollen
die Schwachstellen aufgedeckt werden, die in den nachfolgenden Kapiteln besonders sorgfältig diskutiert werden müssen.
7
2. Schulbuchanalyse
Die Newtonsche Mechanik ist nach dem Oberstufenlehrplan von 1985 in Realgymnasien
Stoff der 5. Klasse, und in Gymnasien Stoff der 6. Klasse. Bei der Behandlung des entsprechenden Themengebietes „Einfache Bewegungen und ihre Ursachen“ werden die Lerninhalte
„Grundgleichungen
der
Mechanik“,
„Modell
des
materiellen
Punktes“,
„Bahn“,
„Geschwindigkeit“, „Beschleunigung“, „Grundversuche zur Bewegungslehre“, „graphische
Darstellung von Bewegungen“, „Dimensionsbetrachtungen“, „abgeleitete Größen und ihre
Einheiten“, „Skalare und Vektoren in der Bewegungslehre“, „Inertialsysteme“, „Kraft“, „Federkraft“, „Reibung“, „Masse und Gewicht“, „zusammengesetzte Bewegung“, „Anhaltestrecke“
und „Überholstrecke“ gefordert.
Ich habe zur Erstellung dieser Schulbuchanalyse fünf von den in Österreich zugelassenen Schulbüchern untersucht. Dabei konzentrierte ich mich einerseits auf die Behandlung
des Modelldenkens der Physik „Realwelt → Modell → Modelleigenschaften → Realwelt“ als
notwendige Basis für die Erläuterung der Zuverlässigkeit und Zweckmäßigkeit von Modellvorstellungen - da dies eine Forderung des Lehrplans für Realgymnasien, insbesondere für
den materiellen Punkt, ist. Andererseits wollte ich einen Einblick in die Darstellung der Newtonschen Axiome oder allgemeiner der Newtonschen Mechanik in Schulbüchern gewinnen.
2.1. Schreiner – Physik 1
Da den Schülerinnen und Schülern laut Lehrplan das Modelldenken der Physik vermittelt
werden soll, erwarte ich mir, dass der Begriff „Modell“ im ersten Teil einer zweiteiligen Schulbuchreihe eingeführt und näher erläutert wird. Der Modellbegriff ist im Register zu finden. Es
werden auch vier Modelle – nämlich das „Kristallmodell“ [S. 3, S. 96], das Modell des „Starren Körpers“ [S. 15], das Modell des „Massenpunktes“ [S. 15] und das Modell des „Idealen
Gases“ [S. 96, S. 110] - verwendet und als solche bezeichnet. Offensichtlich handelt es sich
dabei um den engen Begriff eines „Modells“, wo eine Klasse von realen Objekten (zum Beispiel alle Bergkristalle) durch ein Modellobjekt ersetzt wird. Es wird somit lediglich der enge
Modellbegriff vermittelt.
Leider versäumt Schreiner dann, diese konkreten Beispiele zu nutzen, um den Schülerinnen und Schülern einige allgemeine Charakteristika der „Modellbildung“ nahe zu bringen. So werden zwar, etwa wieder am Beispiel des Kristalls, die verschiedenen Schritte der
8
Modellbildung – das Erkennen von Gemeinsamkeiten an einer Klasse von zunächst verschieden anmutenden Phänomenen; das Weglassen der als unwichtig erachteten Eigenschaften so, dass nur noch ein idealisiertes Phänomen mit eben diesen wichtigen
Eigenschaften übrig bleibt; und die Ersetzung dieses idealisierten Phänomens durch ein
passendes Modell [vgl. KOHLES 2001, Kapitel 2] – stillschweigend durchgeführt. Den Schülerinnen und Schülern wird jedoch nicht gesagt, dass es sich dabei ganz allgemein um typische Schritte jeder Modellbildung handelt. Jegliche Erklärungen und Erläuterungen zu den
einzelnen Schritten fehlen. Es wird so der Anschein erweckt als wären diese selbstverständlich und es gäbe keine Alternative. Durch diese Behandlung wird nicht gewährleistet, dass
den Schülerinnen und Schülern das Modelldenken der Physik näher gebracht wird. Sie werden so die Fähigkeit, für gewisse einfache Situationen selbst ein physikalisches Modell zu
entwerfen, nicht erwerben.
Nirgends wird ersichtlich, dass das Modelldenken der Physik durch die Schritte „Realwelt → Modell → Modelleigenschaften → Realwelt“ charakterisiert wird. Damit fehlt auch
jede Grundlage für eine Verallgemeinerung des Modellbegriffs in der Weise, dass den Schülerinnen und Schülern auch die Newtonsche Mechanik in ihrer Gesamtheit als ein Modell
nahe gebracht werden könnte.
Lediglich die Bausteine „Massenpunkt“ und „Starrer Körper“ werden als Idealisierung
eines realen Objektes eingeführt. Schreiner behandelt dabei jedoch zu oberflächlich, welche
Eigenschaften an einem realen Objekt als wesentlich, und welche als unwesentlich angesehen werden, wenn er als „Massenpunkt“ oder „Starrer Körper“ modelliert wird („Der Massenpunkt ist ein brauchbares Modell, wo die Größe eines Körpers unwichtig ist [S. 15].“).
Dass „Kraft“ und ebenso die „Beschleunigung“ erst durch eine Modellierung entstehen, ist dem Autor leider unbekannt. Der Begriff „Kraft“ wird mit Hilfe der Alltagserfahrung
motiviert: „Wegen unseres Empfindens der Muskelkraft ist uns der Kraftbegriff aus dem Alltag geläufig [S.29].“ Diese Vorgangsweise ist sehr ungünstig, da die Nichtbehandlung der
Unterschiede zwischen dem umgangssprachlichen und dem wissenschaftlichen Kraftbegriff
bei den Schülerinnen und Schülern immer wieder zu schlimmen Missverständnissen führt.
Des weiteren wird auch verschwiegen, warum die Kraft als Vektor modelliert werden kann,
obwohl diese Darstellungsweise im Folgenden immer wieder benutzt wird.
Angesichts dieser Unterlassungen verwundert nicht, dass eine angemessene Darstellung der Newtonschen Axiome fehlt. Im entsprechenden Kapitel „Wechselwirkung“ finden
Schülerinnen und Schülern nur: „... Newton gab dem Beharrungsgesetz seine richtige Formulierung und führte es als Grundgesetz der Physik ein [S. 24].“ Was Grundgesetze der
Physik sind, und welche Rolle sie spielen, bleibt offen. Das erste Newtonsche Axiom ist lediglich eine logische Schlussfolgerung des Gedankenganges: „Wenn wir eine Wechselwirkung dafür verantwortlich machen, daß ein Körper seine Geschwindigkeit ändert, dann
9
müssen wir konsequenterweise erwarten, daß ein Körper seine Geschwindigkeit nicht ändert, wenn er keiner Wechselwirkung unterliegt [S. 22].“ Das zweite Newtonsche Axiom finv
det sich kurz und bündig als der Merksatz: „Definition der Kraft v(t) : Die auf einen Körper
v
wirkende Kraft F ist das Produkt aus der Masse m eines Körpers und der an ihm erzielten
v
Beschleunigung a ,
v
v
F := m a [S. 29].“
Dann behauptet Schreiner: „Mit Hilfe der Newtonschen Mechanik kann die Bewegung jedes
Körpers berechnet werden, wenn man seine Ausgangssituation (Ort und Geschwindigkeit)
und die auf ihn wirkenden Kräfte kennt [S. 203].“ Das mutet seltsam an, da ja nach Schreiners Definition die Kräfte erst durch die Beschleunigung bekannt sind, die ihrerseits erst bekannt ist, wenn die Bahn bekannt ist. Also sagt Schreiner eigentlich nichts anderes als „Mit
Hilfe der Newtonschen Mechanik kann die Bahn jedes Massenpunktes bestimmt werden,
wenn dessen Bahn bekannt ist“! Meiner Meinung nach muss die intelligente und physikinteressierte Schülerin aus meiner Geschichte am Ende des ersten Kapitels zu dieser Interpretation kommen, wenn sie versucht, Schreiners Merksatz nicht ohne Verstand auswendig zu
lernen (was ihr als intelligentes Mädchen ohnehin ein Gräuel ist), sondern sich einen Reim
darauf zu machen. Dies hat schlimme Folgen für ihre Einschätzung der Physik als vernünftige Wissenschaft!
Ein weiterer Schwachpunkt von Schreiners Interpretation des zweiten Newtonschen
v
Axioms als Definition der Kraft über die Beschleunigung liegt darin, dass dann F niemals
v
eine aus mehreren Einzelkräften F n eindeutig zusammengesetzte Gesamtkraft sein kann.
v
Der Vektor m a gibt keine Auskunft darüber, ob er aus mehreren Teilkräften zusammenge-
setzt ist oder nicht. Im Gegensatz dazu „definiert“ er lediglich die Gesamtkraft. Wie also soll
v
v
beispielsweise aus der „Definition F := m a “ Galileis wichtige Entdeckung, dass die Bev
schleunigung fallender Körper einerseits durch die Schwerkraft m g und andererseits durch
v
die der Schwerkraft entgegenwirkenden Reibung der Luft F R, zustande kommt, - dass also
v
v
v
v
m a = m g + F R gilt - gefunden werden? Oder wie soll die Beschleunigung a eines Schifahrers, der eine Piste hinuntergleitet, „definieren“, dass sie durch das Zusammenwirken von
drei Kräften, nämlich der Schwerkraft, der Auflagekraft der Schneeunterlage und der Reibung von Schnee und Luft entsteht?
Und wie ist es in der Statik? Dort gibt es keine Beschleunigungen, also würden nach
Schreiner dort auch keine Kräfte existieren. Konsequenterweise müssten wir dann den wohl
auch Schreiner seltsam erscheinenden Schluss ziehen, dass es zum Beispiel im Rippengewölbe einer gotischen Kathedrale keine Kräfte gibt! Oder, dass keine Kraft im Spiel ist, wenn
10
sich meine intelligente Schülerin mit aller „Kraft“ gegen die Zimmerwand stemmt! Sogar das
alltagssprachliche „Sich mit aller Kraft gegen etwas stemmen“ verwendet das Wort „Kraft“.
Und da will Schreiner meiner intelligenten Schülerin weismachen, dass eine Kraft erst dann
„definiert“ wird, wenn das „Sich mit aller Kraft gegen etwas stemmen“ auch zu einer Beschleunigung führt!
2.2. Jaros, Nussbaumer, Kunze – Basiswissen 1
Beim Studium des Inhaltsverzeichnisses dieses Schulbuches springt mir die Überschrift „Die
naturwissenschaftliche Methode“ [S. 16f] als Unterkapitel der „Einführung in den Gegenstand
Physik“ ins Auge. Ich bin positiv überrascht, dass dort Physikalische Modelle, wenn auch nur
kurz, thematisiert werden. Besonders freut mich, dass der Zweck der Modellbildung zur
Sprache kommt. Es heißt: „Physiker versuchen seit jeher ein Bild (Modell) der Wirklichkeit zu
erzeugen, das möglichst viele verschiedene Erscheinungen der Natur möglichst einfach erklären kann [S. 17].“ Die Behandlung des Modelldenkens der Physik beschränkt sich also in
diesem Schulbuch nicht auf den engen Modellbegriff. Leider fehlt jedoch die Beschreibung
der ersten beiden Schritte für den Entwurf eines Modells - das Erkennen von Gemeinsamkeiten an einer Klasse von zunächst verschieden anmutenden Phänomenen; das Weglassen
der als unwichtig erachteten Eigenschaften so, dass nur noch ein idealisiertes Phänomen mit
eben diesen wichtigen Eigenschaften übrig bleibt; und die Ersetzung dieses idealisierten
Phänomens durch ein passendes Modell. Nur der dritte und letzte Schritt, der in der Überprüfung der Brauchbarkeit des Modells besteht [vgl. KOHLES 2001, Kapitel 1], wird eingehender
diskutiert.
Dagegen bin ich enttäuscht, dass die Autoren zuerst zwar den erweiterten Modellbegriff ansprechen, aber schon bei der bald darauf folgenden Darstellung der Newtonschen
Mechanik darauf wieder vergessen haben. Leider versäumen sie, diese als wichtigen Spezialfall der „Methode der Physik“ aufzuzeigen! Auch die Art und Weise der Behandlung der
Begriffe „Beschleunigung“, „Massenpunkt“ und „Kraft“ lässt nicht erkennen, dass dies lauter
Bausteine eines umfassenden Modells „Newtonsche Mechanik“ sind: Plötzlich ist wieder nur
mehr der enge Modellbegriff anzutreffen.
Am Beginn des Kapitels „Einfache Bewegungen und ihre Ursachen“ findet sich der
„materielle Punkt“ [S. 31], wobei jedoch ziemlich im Dunkeln bleibt, durch welche Ideen dieses Modell entsteht. Ähnliches gilt für die Behandlung der „Beschleunigung“ und der „Kraft“.
Die Autoren versuchen, die Newtonschen Axiome über die historische Entwicklung zu
motivieren [vgl. S. 40], ohne allerdings zu erklären, was ein Axiom eigentlich ist. Anschlie-
11
ßend an die Behandlung der Grundgesetze der Mechanik ist zu lesen: „Der Trägheitssatz,
die Grundgleichung der Mechanik und das Wechselwirkungsgesetz werden auch die Newtonschen Grundgesetze (Axiome) der Mechanik genannt. Genaugenommen können das
1. und das 3. Axiom aus dem 2. hergeleitet werden [S:45].“
2.3. Sexl, Raab, Streeruwitz – Physik 1
Da dieses Schulbuch vier Bände umfasst, erwarte ich mir eine hinreichend ausführliche Diskussion des Modelldenkens der Physik. Deshalb suche ich zuallererst den Begriff „Modell“ im
Register, doch ohne Erfolg. Aus diesem Grund entscheide ich, das Kapitel „Was ist Physik?“
[S. 7f] zu durchforsten.
Tatsächlich werde ich hier fündig: „Auf der Suche nach den Gesetzmäßigkeiten in der
Natur stützt sich der Physiker ganz wesentlich auf Ergebnisse aus Messungen und Beobachtungen. … Allerdings erfordert die Zusammenstellung des Versuches bereits eine Vorstellung über den möglichen Ablauf. Es muß also ein Gedankenmodell oder eine Theorie
vorliegen, die das Experiment bestätigen oder widerlegen soll [S. 8].“
Als Wort findet sich „Gedankenmodell“ somit im Kapitel „Grundlagen der Physik“.
Dass jedoch das Modelldenken der Physik durch die Schritte „Realwelt → Modell → Modelleigenschaften → Realwelt“ charakterisiert wird, kommt nicht zur Sprache - ebenso wenig wie
die einzelnen Schritte der Modellbildung. Auch bezweifle ich sehr, dass Schülerinnen und
Schüler der 5. und 6. Klasse mit der Bedeutung der im vorherigen Absatz zitierten Worte
auch nur das Mindeste anzufangen wissen. Ebenso dunkel muss ihnen der Merksatz: „Die
Physiker versuchen, das Geschehen in der Natur in der rechten Weise mit mathematischer
Symbolik zu verknüpfen [S. 8]“ bleiben.
Das Wesen des „Modells des materiellen Punktes“ wird auf Grund seiner eigenartigen Einführung meiner Ansicht nach kaum verständlich. Dies geschieht so [S. 25]: „Weil bei
einer Translationsbewegung alle Punkte des Körpers dieselbe Bewegung parallelverschoben
ausführen, genügt es, die Bewegung eines einzigen Punktes zu beschreiben. Es erweist sich
als zweckmäßig, den Körperschwerpunkt, auch Massenpunkt genannt, zu wählen. … Um
diesen Sachverhalt bequemer ausdrücken zu können, hat man »das Modell des materiellen
Punktes« geschaffen [S. 25].“ … Und weiter: „Unter einem materiellen Punkt versteht man
einen Körper, dessen Ausdehnung vernachlässigt werden kann [S. 26].“
Ich befürchte, dass meine nun schon mehrfach zitierte intelligente und physikinteressierte Schülerin angesichts dieser Erläuterung ziemlich verwirrt wäre, denn immerhin ist ihr
die Verwendung des Modells „Massenpunkt“ von der „Keplerbewegung“ vertraut. Dort führen
12
aber weder Erde noch Sonne eine Translation aus und dennoch werden sie als Massenpunkte modelliert. Des weiteren kennt sie das „Fadenpendel“, das als Massenpunkt an einem masselosen Faden modelliert wird, obwohl es keineswegs eine Translationsbewegung
ausführt!
Die Darstellung der Newtonschen Axiome unterscheidet sich kaum von den bereits
besprochenen Schulbüchern. Im Kapitel „Die Bewegungsgleichung“ finde ich erneut die völlig falsche Behauptung, die Kraft sei definiert als Masse mal Beschleunigung: „…erscheint es
v
zweckmäßig die Kraft F als Produkt von Masse mal Beschleunigung zu definieren. Wir legen fest:
v
v
F = m ⋅ a [S. 33]“
Und ein paar Zeilen darunter entdecke ich dann den schon bekannten Schluss: “Das
1. Newtonsche Axiom ist der Trägheitssatz. Er folgt als Sonderfall aus der Bewegungsgleiv
chung. Wenn nämlich die Kraft F = 0 wird, so …“. In diesem Schulbuch kommt das Wort
„Axiome“ also auch vor. Doch damit endet auch schon die ganze Wissenschaft.
2.4. Kraker, Paill – Physik, Band 1 HTL
Die Newtonsche Mechanik wird in diesem Schulbuch besonders kurz behandelt. Auf die Lebenswelt der Schülerinnen und Schüler wird kaum eingegangen. Zur Motivation des ersten
Axioms werden Erfahrungen aus dem Verkehr als Hilfe herangezogen: „Beim plötzlichen
Bremsen eines Autos fällt der Oberkörper des Fahrgastes in den Sicherheitsgurt. … Solche
und ähnliche Beobachtungen kennen wir aus dem Alltag und sprechen von … der Trägheit
der Körper [S. 46].“
Auch in diesem Schulbuch ist die Darstellung der Newtonschen Mechanik ungenau
und fehlerhaft:
v
v
• „Dynamisches Grundgesetz: F = m ⋅ a , Kraft = Masse mal Beschleunigung; eine Masse m
v
v
erfährt unter der Wirkung einer Kraft F eine Beschleunigung a . Die Kraft ist eine abgeleitete Größe. Das dynamische Grundgesetz ist die „dynamische Definition“ der Kraft [S.
47]“.
v
v
• „Das Trägheitsgesetz ist ein Sonderfall des dynamischen Grundgesetzes: F = 0 → a = 0 :
Wirkt keine Kraft auf den Körper, so erfolgt keine Beschleunigung. Der Bewegungszustand bleibt erhalten [S. 47].“
13
• „Ein Axiom wird aus der Erfahrung gewonnen. Es läßt sich aber experimentell nicht beweisen [S. 47]“ Seltsam: Da Erfahrung durchaus auch selbst durchgeführte Experimente umfasst, könnte dieser „Merksatz“ auch so formuliert werden: „Ein Axiom wird aus der
Erfahrung gewonnen, lässt sich aber mit Hilfe der Erfahrung nicht beweisen.“ Was soll
meine intelligente und physikinteressierte Schülerin davon halten?
Angesichts der bisher zitierten „Stilblüten“ überrascht es nicht, dass die Modellbildung nicht
thematisiert wird. Lediglich am Seitenrand sind zwei kurze Bemerkungen zum Modellbegriff
zu finden. Es handelt sich dabei um Notizen zu den Schlagwörtern „Modellvorstellungen“
[S. 143] und „Grenzen eines Modells“ [S. 146]. Worin aber das Modelldenken der Physik
besteht, wird aus dieser Behandlung keinesfalls ersichtlich.
Ja nicht einmal der enge Modellbegriff wird explizit verwendet. Der Begriff „Massenpunkt“ fehlt im Register überhaupt, nicht aber der Begriff „Massenmittelpunkt“. Ich schlage
nach und finde auf der entsprechenden Seite: „Im Schwerpunkt kann man sich die gesamte
Masse des Körpers vereinigt denken, deshalb wird er auch als Massenmittelpunkt bezeichnet [S. 39].“ Über die Modelle „Starrer Körper“ und „Elastischer Körper“ ist zu lesen: „In der
Statik interessiert man sich nicht für die Verformung eines Körpers. Man nimmt ihn als starr
an. Natürlich gibt es keinen wirklich starren Körper. Es ist ein gedachter Grenzfall [S. 41].“
2.5. Lepold – Physik 1
Dieses Schulbuch ist für den Unterrichtsgebrauch an Handelsakademien und an Höheren
Lehranstalten für wirtschaftliche Frauenberufe approbiert. Die Abgänger dieser Schulen ergreifen sicher sehr selten physikalisch-technische Berufe. Das heißt aber keineswegs, dass
für diese Schülerinnen und Schüler das Modelldenken der Physik ohne Wert wäre! Im Gegenteil: Das Modelldenken kommt in ihrer Lebenswelt ja auf Schritt und Tritt vor, wie ich im
Kapitel 1 bereits darlegte [LEUBNER 2002; KOHLES 2001, Kapitel 1 und 2].
Damit sieht es jedoch bei diesem Schulbuch ganz schlecht aus: Die Leserin bekommt
ein ganz falsches Bild von der Physik. So steht unter dem Kapitel „Allgemeines“ unter anderem zu lesen :
• „Von Einzeltatsachen wird auf allgemeingültige Gesetze geschlossen (Induktion) [S.7]“.
Ohne ausführliche Erklärung, was mit diesem „Schließen“ genau gemeint ist, ist dies sicher falsch.
14
• „(Die Physik) ist eine exakte Wissenschaft, d.h. alle physikalischen Vorgänge sind auf
Messungen und mathematische Gleichungen zurückführbar [S. 7]“. Wieder vermisse ich
eine für Schülerinnen und Schüler der entsprechenden Altersstufe einigermaßen einsichtige Erklärung, was damit wirklich gemeint.
Bei der Beschreibung der „Physik als Wissenschaft“ wird der Begriff „Modell“ erwartungsgemäß nicht erwähnt. Auch später bei der Behandlung der Newtonschen Mechanik fehlt er. Bei
der Vereinfachung realer Objekte wird allerdings der enge Modellbegriff eingeführt: Ein
„Massenpunkt“ dient „zur Vereinfachung der Untersuchungen [S. 15]“ von realen Objekten,
und es wird darauf hingewiesen, dass „es Massenpunkte in der realen Welt nicht gibt, son-
dern dass es sich dabei um einen idealisierten Begriff handelt [S. 15]“. Die Kraft wird durch
den Satz „Eine Kraft ist die Ursache einer Bewegungsänderung … [S. 28]“ definiert, und ihre
„Bestimmungsstücke“ mit „Eine Kraft ist eine gerichtete Größe (Vektor) und wird daher durch
eine gerichtete Strecke (mit Pfeil) dargestellt“ angegeben. Natürlich wird mit keiner Silbe erwähnt, dass „Kraft“ ebenfalls ein Modell - für gewisse Einwirkungen auf reale Objekte aus
ihrer Umgebung - darstellt.
Auch in diesem Buch wird von Axiomen geredet, doch im Grunde wieder nur, um sich
durch Erwähnung dieses Wortes das Mäntelchen der Wissenschaftlichkeit umzuhängen.
Eine adäquate Darstellung der Newtonschen Axiome fehlt.
2.6. Resumée
Als Fazit dieser Schulbuchanalyse halte ich fest, dass keines der untersuchten Bücher im
Zuge der Darstellung der Newtonschen Mechanik der Lehrplanforderung gerecht wird, den
Schülerinnen und Schüler das Modelldenken der Physik (Realwelt → Modell → Modelleigenschaften → Realwelt) näher zu bringen. Die Buchautoren glauben offenbar, schon dadurch
„wissenschaftlich“ zu sein, dass sie die Worte „die drei Newtonschen Axiome“ wenigstens in
den Mund nehmen. Mir gefällt auch nicht, dass die Newtonschen Axiome als fertige Wahrheiten präsentiert werden, anstatt ihr Zustandekommen und ihre Bedingungen zu hinterfragen. Vielleicht werden die Newtonschen Axiome von diesen Schulbuchautoren als fertige
Wahrheiten vorgestellt, weil sie selbst Autoritätsgläubige sind („So berühmte Männer wie
Newton, Mach und Co können doch nichts Falsches gesagt haben, auch wenn mir selbst
Manches ein wenig ungereimt erscheint!“). Ein solcher Unterricht leistet nur wieder der Autoritätsgläubigkeit der Schülerinnen und Schüler Vorschub und produziert im besten Falle
15
„physikalische Schriftgelehrte“, deren physikalische (Ver-)Bildung höchstens bei der „Millionenshow“ im TV verwertbar ist.
Auch wird bei der Behandlung der Newtonschen Mechanik ausschließlich der enge Modellbegriff verwendet. Es wird daher in keiner Weise sichtbar, dass die Newtonsche Mechanik insgesamt ein einziges, wenn auch komplexes, Modell darstellt. Es gibt zwar Autoren, die
den Begriff „Modell“ nur eng verstanden wissen wollen, während sie für ein umfassendes
Modell den Begriff „Theorie“ bevorzugen [HESTENES 1996]. Ebenso gibt es aber auch Autoren, die es – so wie ich - für sinnvoller halten, unter „Modell“ den erweiterten Modellbegriff zu
verstehen [ARECCHI 1996]. Wie dem auch sei, in den geprüften Schulbüchern kommt auch
der Begriff „Theorie“ nirgends so vor, wie dies auch im Sinne der Auflagen des Lehrplans
notwendig und wünschenswert wäre.
Daher setze ich mir in dieser Arbeit das Ziel, meinen Lehrerkolleginnen und Lehrerkollegen mit einem Vorschlag an die Hand zu gehen, wie die Newtonsche Mechanik als ein komplexes Modell für einen bestimmten Ausschnitt aus der (physikalischen) Welt schülergerecht
dargestellt werden kann. „Schülergerecht“ heißt dabei für mich, dass die Voraussetzungen
nicht über die Vorkenntnisse der Schülerinnen und Schüler der entsprechenden Altersstufe
hinausgehen. Dieser Vorschlag wird dann erfolgreich gewesen sein, wenn er von interessierten und engagierten Lehrerkolleginnen und Lehrerkollegen an einem Wochenende durchgelesen und so vollständig zu eigen gemacht werden kann, dass diese spontan beschließen,
ihren Schülerinnen und Schülern die Mechanik genau so zu präsentieren!
16
3. Die „Newtonsche Mechanik“
und das Modelldenken in der Physik
Es gilt nun, die Newtonsche Mechanik konsequent aber schülergerecht darzustellen. Und
zwar so, dass ihre Struktur als umfassende Modellierung für jenen Bereich von realen Vorgängen aus der Lebenswelt der Schülerinnen und Schüler, in dem es um die Bewegung von
Dingen geht, klar hervortritt.
Dazu müssen wir uns zu aller erst einmal fragen, wie man als Schülerin oder Schüler
überhaupt so weit kommt, zu sagen, etwas über die Bewegungen der Dinge, wie etwa die
Bahn eines geworfenen Basketballs, verstanden zu haben. Oder mit anderen Worten: Wie
lernen Kinder eigentlich den geschickten Umgang mit einem Basketball?
Allen Kindern, die den Umgang mit einem Basketball üben, fällt sehr bald auf, dass nur
bestimmte Dinge zu beachten sind, wenn es darum geht, den Basketball in den Korb zu werfen. So ist zum Beispiel das Gewicht des Balles wichtig, nicht aber dessen Farbe oder die
Farbe unserer Sportkleidung, die wir bei einem Wurf gerade tragen. Ebenso unwichtig ist, an
welchem Wochentag wir werfen, oder wie das Wetter außerhalb der Halle ist. Wenn wir aber
von einer bestimmten Stelle aus werfen, dann ist die genaue Armbewegung, mit der wir werfen, und die zugehörige Muskelspannung sehr wichtig, wenn der Ball im Korb landen soll.
Denn wirft man zu ganz verschiedenen Zeiten einen Ball von immer gleichem Gewicht von
immer der gleichen Stelle mit der gleichen Armbewegung und der gleichen Muskelspannung,
so landet der Ball immer im Korb (wobei wir von anderen möglicherweise wichtigen Einflüssen, wie etwa kräftige Zugluft durch offene Fenster, oder ein frisch gebohnertes rutschiges
Parkett, absehen wollen). Wir stellen also fest, dass der erfolgreiche Ballwurf wiederholbar
ist, falls alle wichtigen Merkmale gleich sind. Und diese wichtigen Merkmale gelten nicht nur
für ein ganz bestimmtes Kind, sondern sind für alle Kinder gleich, die sich in der Körpergröße
nicht all zu sehr unterscheiden: Egal welches Kind den Ball wirft, der Ball landet im Korb,
falls die wichtigen Merkmale beim Abwurf die gleichen sind.
Hier tut sich bereits ein erstes Feld für eine sinnvolle physikalische Hausaufgabe
auf. Diese könnte etwa von der folgenden Art sein: Gib bis zur nächsten Physikstunde für ein
halbes Dutzend ganz verschiedener Vorgänge alle dir „wichtig“ erscheinenden Merkmale
und einige dir „unwichtig“ erscheinenden Merkmale an. Diskutiere, welche Art Wiederholbarkeit deine wichtigen Merkmale garantieren. In der nächsten Physikstunde werden wir dann
17
deine Vorschläge zusammen mit denen deiner Mitschülerinnen und Mitschülern besprechen!.
Was lässt sich über die Anzahl der wichtigen Merkmale eines herausgegriffenen
Vorganges sagen? Bei Vorgängen aus ganz verschiedenen Gebieten kann diese Zahl sehr
verschieden sein. Die „physikalischen“ Vorgänge - also jene, die wir im Rahmen der „Physik“
verstehen wollen - sind jedoch dadurch ausgezeichnet, dass wir immer mit nur sehr wenigen
wichtigen Merkmalen auskommen. Und um es nochmals zu betonen, diese wenigen wichtigen Merkmale sind dabei die, die in einer gewissen Anfangssituation gleich sein müssen,
damit – für unser Empfinden - der Vorgang gleich wie beim letzten Mal abläuft; also wiederholbar ist. Die unwichtigen Merkmale sind hingegen jene, die bei der Wiederholung des Vorganges durchaus anders sein können, ohne dass der Vorgang für unser Empfinden anders
abläuft.
Dabei müssen wir uns aber bewusst bleiben, dass erst wir es sind, die festlegen, was
wir unter der „Wiederholung“ des Vorganges verstehen wollen. Erst nach dieser Festlegung
können die Merkmale in wichtige und unwichtige getrennt werden! Ob ein Merkmal eines
Vorganges also wichtig oder unwichtig ist, ist streng genommen nicht von irgendwoher fix
vorgegeben. Im Gegensatz dazu wird dies erst durch unsere subjektive Festlegung dessen,
was wir als „Wiederholung“ ansehen wollen, fixiert (auch wenn wir in vielen Situationen nicht
so richtig zu sehen vermögen, welche Alternativen sich für die Festlegung von „wiederholbar“
anböten).
Wenn wir verstanden haben, was wir hinsichtlich der Feinmotorik und der Spannung der Muskeln in unseren Armen tun müssen, um den Ball von einer bestimmten Stelle
des Spielfeldes aus in den Korb zu werfen, und welche anderen Armbewegungen und Muskelspannungen dazu von allen möglichen anderen Stellen aus erforderlich sind, dann können wir mit dem Basketball umgehen. Doch das auswendig Merken all dieser leicht
unterschiedlichen „Werte“ der wichtigen Merkmale eines erfolgreichen Korbwurfes genügt
unserer natürlichen Neugier noch nicht. Vielmehr sind wir auf der Suche nach weitergehenden Regelmäßigkeiten, mit deren Hilfe wir für beliebige Stellen des Spielfeldes unmittelbar
angeben können, welche „Werte“ wir den wichtigen Merkmalen für einen treffsicheren Ballwurf geben müssen.
Als Vorbereitung für die folgenden Kapitel merken wir hier an, dass wir – mehr oder
weniger unbewusst – solche weitergehende Regelmäßigkeiten immer in ein gedankliches
Modell gießen. Dieses Modell haben wir dann – wieder mehr oder weniger unbewusst - bei
jedem Korbwurf vor Augen. Für die meisten Schülerinnen und Schüler wird dieses Modell
wohl so aussehen, dass sie im Moment eines Korbwurfes vor ihrem „geistigen Auge“ so etwas wie das Bild eines Basketballspielers sehen, der sich „treffsicher“ verhält. Diesen versuchen sie dann bei ihrem Wurf nachzuahmen. Das gedankliche Modell wird also blitzschnell in
18
die Wirklichkeit des Korbwurfes im Turnsaal übertragen. Es leitet die Schülerinnen und Schüler bei ihren Korbwürfen. Ganz offensichtlich bringt die Methode des Vorhersehens künftiger
Ereignisse mit Hilfe der Modellierung des Vorganges eine gewaltige Vereinfachung der notwendigen Denkprozesse mit sich: Anstatt sich mit Unmengen von unwichtigen Merkmalen
befassen zu müssen, kann sich das Gehirn von vornherein auf die wenigen wesentlichen
Merkmale des Vorganges beschränken. Die damit verbundene Zeitersparnis kann nicht nur
beim Basketball einen wichtigen Unterschied machen!
Selbstverständlich testen wir ein einmal entdecktes Modell für ein erfolgreiches
Basketballspiel ausgiebig auf seine Brauchbarkeit. Dies geschieht immer dann, wenn wir
Basketball spielen. Solange sich das Modell bewährt, bleiben wir auch dabei. Vielleicht so
lange bis der Turnlehrer oder die Turnlehrerin uns zeigen, wie unser Modell noch verfeinert
werden könnte, um unser Basketballspiel noch einmal zu verbessern.
Dieser Gedanke des „Verstehens mit Hilfe eines Modells“ muss von der Physiklehrerin oder dem Physiklehrer unbedingt ausführlich dargelegt werden. Dabei muss diese Darlegung deutlich machen, dass alles Verstehen im Alltag und in der Wissenschaft mit Hilfe
von Modellen geschieht. Die Benutzung der Physik als Hilfsmittel zur Heranführung der
Schüler und Schülerinnen an diese Erkenntnis ist für mich ein viel lohnenderes Ziel des Physikunterrichtes im Sinne einer echten Bildung fürs Leben als das Einpauken von möglichst
vielen „Formeln“! Hat doch schon John Dewey auf die Frage „What do you see as causes for
the failure of science education?“ geantwortet: „The causes are many and complex...but I
single out one influential cause,....that science has been so frequently presented just as so
much ready-made knowledge, so much matter-of-fact and law, rather than as the effective
method of inquiry into any subject matter.“ [ANSBACHER 2000] Leider fehlt mir in dieser
Arbeit der Platz für eine ausführliche Diskussion dieser so wichtigen Materie, weshalb ich
wieder nur auf [LEUBNER 2002] verweisen kann.
Eine Physiklehrerin, die gemeinsam mit ihren Schülerinnen und Schülern diese
„Geschichte“ (oder eine über das Lernen einer anderen für die Schülerinnen und Schüler
aktuellen Sportart) ausführlich etwa in der Form eines moderierten Dialoges [ALBRECHT
2001] entwickelt, hat ihre Klasse schon bestens auf die „Geschichte der Newtonschen Mechanik“ vorbereitet. Und zwar ausschließlich auf der Grundlage von bereits vorhandenen
Begriffen und Kenntnissen aus der Lebenswelt der Schülerinnen und Schüler. Also ganz so
wie es der Lehrplan vorschreibt.
Die folgenden Kapitel sind nun dem ausführlichen Nachweis gewidmet, dass auch die
Newtonsche Mechanik bestens in den skizzierten Modellierungs- und Überprüfungsprozess
passt, mit dem unser Denken jedwedes Verstehen von Vorgängen in unserer Lebenswelt
bewerkstelligt. Denn die Newtonsche Mechanik ist in der Tat ein Modellierungs- und Überprüfungsschema zum Verständnis von jenem Spezialfall von Vorgängen in unserer Lebens19
welt, wo es um die Bewegungen von realen Objekten in eben dieser Lebenswelt geht. Weil
ein übersichtliches Bild bekanntlich mehr als tausend Worte sagt, stelle ich unseren Überlegungen mit der Abb. 1 [PUNTAJER 1998, Abschnitt 3.4.2] eine einfache Grafik voran, die
das Schema des Modellierens und Überprüfens in einfachster Form wiedergibt.
Abb. 1: Schema des Modellierens und Überprüfens
Dieses Diagramm entspricht dem im Schulbuch Basiswissen 1 [JAROS 1990, S. 17] gezeigten. Es ist aber viel übersichtlicher, weil es sich auf die wesentlichen Merkmale einer ausge-
reiften „Physikalischen Theorie“ (wie es die Newtonsche Mechanik ja ist) beschränkt. Wie ich
bereits in meiner Schulbuchanalyse erwähnte, ist mir sehr wohl bewusst, dass die Schülerinnen und Schüler zu diesem Zeitpunkt keine einzige ausgereifte „Physikalische Theorie“ kennen, an der sie durch Vergleich die Bestandteile des Diagramms „entdecken“ könnten. Doch
20
Anna K. Puntajer hat an verschiedenen Beispielen überzeugend aufgedeckt, dass die Schülerinnen und Schüler die einzelnen Schritte dieses Diagramms – wenn auch unbewusst – auf
Schritt und Tritt in ihrer Lebenswelt bei der Bewältigung zahlloser Alltagssituationen benutzen! [PUNTAJER 1998, Abschnitt 3.2] Daher kann die Lehrerin auf den schier unerschöpflichen Fundus dieser Beispiele zurückgreifen, um den Schülerinnen und Schülern plausibel zu
machen, dass die einzelnen Schritte des obigen Diagramms auch bei der „Bewältigung“ physikalischer Situationen gegangen werden! Aus diesem Grunde ist dieses Diagramm keineswegs etwas, das nur auswendig gelernt werden kann. Vielmehr kann es in den Händen einer
geschickten Lehrerin auf eine breite Basis von vorhandenen Begriffen und Kenntnissen aus
der Lebenswelt der Schülerinnen und Schüler gegründet werden - ganz im Sinne der Vorgaben des Lehrplans.
Übrigens bietet sich hier eine weitere sinnvolle physikalische Hausaufgabe an, indem
man die Schülerinnen und Schüler auffordert, bis zur nächsten Physikstunde in ihrer Lebenswelt drei Beispiele zu finden, wo sich beim Verstehen von Vorgängen die Bestandteile
des Diagramms in Abb. 1 erkennen lassen.
Im Abschnitt 3.1. stellen und beantworten wir die Frage, welche Klasse von Vorgängen in unserer Lebenswelt wir mit Hilfe der Newtonschen Mechanik zu verstehen versuchen. Er behandelt also den „Inhalt“ des linken oberen Kästchens aus der Abb. 1. Die
detaillierte Erläuterung des „Inhaltes“ der übrigen Kästchen und die Bedeutung und die Implikationen der Verbindungen der Kästchen untereinander folgen in den Kapiteln 3.2. –3.6.. In
Kapitel 3.7. betrachten wir als eine Anwendung der Newtonschen Mechanik den - den Schülerinnen und Schülern einigermaßen vertrauten - Spezialfall der Newtonschen Gravitationstheorie. Diesen entwickeln wir natürlich in enger Anlehnung an das Diagramm in Abb. 1. Für
weitere Anwendungen, bei denen von der Lehrerin jeweils das „zu Grunde liegen“ der Bestimmungsstücke des Diagramms in Abb. 1 herauszuarbeiten ist, verweise ich auf die gängigen Schulbücher. Statt dessen kläre ich im Abschnitt 3.8., welcher Status dem Konzept
„Fliehkraft“ innerhalb der Newtonschen Mechanik zukommt. Diese „Scheinkraft“ geistert in
praktisch allen Schulbüchern herum, obwohl nur zu bekannt ist, dass die Newtonsche Mechanik keinen Platz für „Scheinkräfte“ sondern nur für „handfeste“ Kräfte hat!
Zum Abschluss dieses Kapitels möchte ich noch auf einen historischen Punkt eingehen: Wenn die folgenden Kapitelüberschriften immer wieder die Frage stellen: „Wie werden in der Newtonschen Mechanik ____________ modelliert?“ und wir diese Frage dann im
darauf folgenden Text beantworte, dann müssen wir uns im Klaren sein, dass wir damit nicht
die tatsächliche, historisch richtig wiedergegebene Vorgangsweise von Isaac Newton aus
dem Jahre 1687 nachvollziehen. Wir beantworten diese Frage dann jeweils aus der Sicht
des heutigen Verständnisses der Newtonschen Mechanik. Newton, der als Erster systematisch versuchte, die Natur mathematisch zu modellieren, hat viele der Dinge, die wir heute
21
ganz klar sehen, zu seiner Zeit noch nicht so klar sehen können. Dennoch können wir seine
Kreativität nur bewundern. Er hat im Entwurf von physikalischen Theorien eine Entwicklung
eingeleitet, nach der - in geeigneter Verfeinerung – heute alle physikalischen Theorien gebildet werden!
3.1. Welche Klasse von realen Vorgängen
soll mit der Newtonsche Mechanik verstanden werden?
Eine Triebfeder, die Newtonsche Mechanik zu erfinden, war einmal die Erkenntnis, dass Bewegungen von Dingen in unserer Umgebung nicht nur sehr häufig sind, sondern für uns
auch von immenser Bedeutung sein können. Denken wir nur an ein Auto, das wir plötzlich
auf uns zukommen sehen, oder an einen gestürzten Schiläufer, der auf der Schipiste mit
großer Wucht auf uns zu purzelt. Daneben gibt es zahlreiche Maschinen und technische Geräte, die uns viel Mühe abnehmen, und die sich entweder selbst bewegen oder die bewegliche Teile umfassen. Deshalb ist es für uns von großem Interesse, den Verlauf von
Bewegungen von Dingen zu verstehen. Andererseits glauben wir Menschen - bei unserer
ständigen Suche nach Mustern und Regelmäßigkeiten - entdeckt zu haben, dass wir die Bewegung eines bestimmten realen Objektes immer mit Einwirkungen von anderen Dingen auf
dieses Objekt in Verbindung bringen können. Und wie schon oben bei unserem Basketballbeispiel ausgeführt, fällt es uns auch gar nicht schwer, bei den Bewegungen von Dingen und
ihren (vermuteten) Auslösern hinsichtlich der Wiederholbarkeit der Vorgänge einige wenige
wichtige und sehr viele unwichtige Merkmale zu unterscheiden.
Zusammenfassend stellen wir fest, dass die Newtonsche Mechanik versucht, die Reaktionen von herausgegriffenen realen Objekten auf Einwirkungen aus ihrer Umgebung in die
Form der Abb. 1 zu gießen. Dabei habe ich bei der eben gewählten, ziemlich ungewohnten
Formulierung „die Reaktionen von herausgegriffenen realen Objekten auf Einwirkungen aus
ihrer Umgebung“ mit voller Absicht Bezeichnungen gewählt, die nicht schon innerhalb des
Modells „Newtonsche Mechanik“ eine feste Bedeutung erlangt haben. Ich möchte nämlich
auf diese Weise nachdrücklich zum Ausdruck bringen, dass die realen Vorgänge in der Lebenswelt und ihre im Rahmen der Newtonschen Mechanik vereinfachten Modellierungen
etwas Verschiedenes sind. Ich spreche also in der Welt der realen Vorgänge von der Reaktion eines bestimmten realen Objektes auf eine Einwirkung aus seiner Umgebung, und nicht
etwa von der Beschleunigung eines Massenpunktes durch eine äußere Kraft. Offensichtlich
ist meine Absicht dabei eine rein didaktische: Für den Neuling soll bereits durch die Wortwahl eine klare Trennlinie zwischen dem realen Vorgang auf der einen Seite, und dem Mo-
22
dell dieses realen Vorganges im Rahmen der Newtonschen Mechanik auf der anderen Seite
gezogen werden. Wenn wir also von „Kraft“ reden, dann ist dies nicht die „Einwirkung“ selbst,
sondern die modellierte Einwirkung. Deshalb stehen im linken oberen Kästchen der Abb. 1
diese Umschreibungen, während die Newtonsche Modellierung dafür im rechten oberen
Kästchen steht.
3.2. Wie modelliert die Newtonsche Mechanik
äußere Einwirkungen auf reale Objekte?
Machen wir uns einleitend klar, was wir mit „Einwirkungen auf ein reales Objekt“ meinen: Bei
den „Vorgängen mit Bewegung“, interessiert uns ja meistens die Bewegung eines ganz bestimmten realen Objektes auf die Einwirkungen aus dessen Umgebung. Dabei setzt sich die
Umgebung aber auch aus lauter Objekten zusammen. So ist etwa ein Wasserstrahl, mit dem
wir einen Holzpantoffel über die Terrasse spülen, auch ein Objekt. Wenn wir uns aber für die
Bewegung des Holzpantoffels interessieren, dann ist dieser das Objekt und der Wasserstrahl
wird zu einer Einwirkung auf diesen aus dessen Umgebung. Und so ist es in den meisten
Fällen. Aufgrund eines speziellen Interesses wählen wir ein reales Objekt aus allen vorhandenen aus. So machen wir all die anderen Objekte zur Umgebung dieses einen ausgewählten Objektes, die auf dieses in mannigfacher Weise einwirkt.
Abb. 2: Auswahl eines realen Objektes: Wollen wir die Einwirkung des Rückens des Mannes auf die Frau oder
die Einwirkung des Rückens der Frau auf den Mann betrachten? Wenden wir unser Interesse dem Mann zu, so
stellt dieser das ausgewählte reale Objekt dar und alle weiteren realen Objekte, wie die Frau und das Surfbrett
sind Einwirkungen aus seiner Umgebung.
Wenn wir alle in einer beobachteten Situation vorhandenen Dinge in ein Objekt, dessen Bewegung uns interessiert, und in dessen Umgebung getrennt haben, dann glauben wir, dass
23
wir von allen zur Umgebung gehörenden Objekten sagen können, ob sie auf das ausgewählte Objekt einwirken oder nicht. Warum sage ich „wir glauben sagen zu können, welche Objekte einwirken und welche nicht“ anstatt zu sagen „wir wissen, welche Objekte einwirken
und welche nicht“? Nun, weil wir uns dessen manchmal nicht ganz sicher sind. So lag der
berühmte Aristoteles mit seiner Meinung, dass Körper schneller fallen, als leichte, gar nicht
so schlecht. Er wäre hingegen noch besser gelegen, wenn er erkannt hätte, dass dabei die
Einwirkung der Luft eine ganz wesentliche Rolle spielt. Natürlich wissen wir heute um diesen
Aspekt der Einwirkung der Umgebung auf fallende Körper sehr gut Bescheid. Doch als vorsichtige Physiker lassen wir zumindest die Möglichkeit zu, dass wir in ganz speziellen Fällen
nachträglich eine Einwirkung ins Modell aufnehmen können, an die wir anfänglich nicht gedacht hätten. So bleiben wir also bescheiden und behaupten nur bis auf weiteres, dass wir
immer die Einwirkungen auf eine Objekt aus dessen Umgebung identifizieren können. Eine
solche Behauptung nennen wir bekanntlich ein Postulat. Ein solches wird als Arbeitshypothese so lange als richtig angenommen, bis uns vielleicht Beobachtungen oder andere Unstimmigkeiten im Modell zwingen, diese abzuändern.
Als nächstes trachten wir, an den Einwirkungen jene Merkmale zu finden, die wesentlich in die (auf die Einwirkung folgende) Bewegung eingehen. Dann können wir alle anderen
Merkmale als unwichtig weglassen. Dazu betrachten wir mit unseren Schülerinnen und
Schülern das Beispiel „Fußball“ (als herausgegriffenes Objekt), und „Tritt des Fußballers“
(als Einwirkung der Umgebung auf das Objekt Fußball). [vgl. PRONEGG 1993, S. 3.6 f.]
Beim Tritt gegen einen Fußball sind offensichtlich die Eigenschaften „Stärke“, „Richtung“ und „Treffpunkt“ wesentlich.
Wird nicht stark genug geschossen, dann ist das Fangen des
Balles für den Tormann ein leichtes Spiel. Stimmt die Richtung
des Trittes nicht, so geht der Ball weit am Tor vorbei oder wird
im schlimmsten Fall vom Schützen nicht einmal getroffen. Für
den Tormann besteht auch in diesem Fall keine Gefahr. Aber
auch die Stelle, wo der Fußball getroffen wird, ist für die Qualität
des Schusses von entscheidender Bedeutung. Ist ein Schütze
Abb. 3: Fußballspieler
gut, so stimmt er die Richtung seines Trittes mit der Stelle, wo er den Ball trifft, ab. Auf diese
Weise sind überraschende Bogenschüsse möglich, die den Torwart leicht in eine heikle
Spielsituation bringen können. Dagegen erkennen wir ohne Weiteres, dass weitere Merkmale bei der Einwirkung „Fußtritt“, wie Marke oder Farbe der Fußballschuhe, Name, Haarfarbe
oder Herkunft des Schützen für die Bewegung des Balles irrelevant sind und außer Betracht
bleiben können. Nur die Merkmale „Stärke“, „Richtung“ und „Angriffspunkt“ sind wesentlich.
Dank Newton wissen wir heute, dass dies ganz allgemein so ist. Alle Einwirkungen,
die zu Bewegung führen (solche nennen wir in Hinkunft „Mechanische Einwirkungen“) lassen
24
sich durch konsequentes Weglassen aller unwichtigen Merkmale ausschließlich durch die
drei wesentlichen Merkmale „Stärke“, „Richtung“ und „Angriffspunkt“ charakterisieren.
Daher suchen wir nun ein mathematisches Objekt, das sich als Modell für diese idealisierte Einwirkung eignet. Wir fragen also, welches mathematische Objekt bereits durch
die drei Merkmale (oder Eigenschaften), „Richtung“, „Stärke“ und „Angriffspunkt“ eindeutig
charakterisiert wird. Offensichtlich ist dies ein Pfeil (also ein geometrisches Objekt), wenn wir
dessen Länge mit der „Stärke“ der Einwirkung, dessen Richtung mit der Richtung der Einwirkung und den Ort seiner Spitze mit dem Ort des Angriffspunktes identifizieren.
Abb. 4: Einwirkung „Fußtritt“ auf reales Objekt „Fußball“ modelliert als Kraftvektor – Der Fußball wird an verschiedenen Stellen mit unterschiedlicher Stärke getroffen
In der Newtonschen Mechanik wird also der in der Realität oft recht komplexe Vorgang „mechanische Einwirkung auf ein reales Objekt“ durch das einfachere und gleichzeitig auch gröv
bere Objekt „Pfeil“ ersetzt. Dieses nennen wir aber dort eleganter „Kraftvektor F “.
Im Unterricht sollte unbedingt besprochen werden, dass nicht alle mechanischen
Einwirkungen auf reale Objekte durch das Modell „Pfeil“ sinnvoll modelliert werden können.
Wenn wir beispielsweise am Morgen unsere Hände eincremen, dann können wir eine Hand
als herausgegriffenes Objekt betrachten, und die zweite Hand als Einwirkung auf die Erste.
Beim Aneinanderreiben der Hände wird sich die erste Hand einigermaßen mitbewegen, so
dass die zweite Hand offensichtlich eine mechanische Einwirkung darstellt. Da sich aber für
diese Einwirkung kein sinnvoller Angriffspunkt angeben lässt, kann sie demnach auch nicht
durch einen Pfeil modelliert werden. Streng genommen ist die Angriffstelle einer Einwirkung
in der Realität immer mehr oder weniger ausgedehnt. Sie ist damit eigentlich eine Angriffsfläche. [vgl. PRONEGG 1993, S. 3.9] Die Angriffsstelle einer Einwirkung kann jedoch zu einem Angriffspunkt „geschrumpft“ werden, falls diese im Vergleich zur Oberfläche des
entsprechenden realen Objekts klein ist. Dann und nur dann ist es möglich, die Einwirkung
durch einen Pfeil zu modellieren. Einwirkungen, denen kein Angriffspunkt zugeordnet werden
25
kann, sind also nicht Gegenstand der Newtonschen Mechanik. Beispiele dafür sind das oben
genannte Eincremen der Hände oder das Kneten eines Teiges. Es ist nicht möglich, der
Einwirkung „kneten“ auf das reale Objekt „Teig“ einen Angriffspunkt zuzuordnen, da die Oberfläche des Teigs und die Handflächen ungefähr gleich groß sind.
Dass die beschriebenen Einwirkungen in der Newtonschen Mechanik nicht modellierbar sind, bedeutet aber nicht, dass dies prinzipiell nicht möglich ist. Es wäre dazu nur ein
aufwendigeres Modell als der Pfeil notwendig.
Außerdem ist es nie überflüssig, die Schülerinnen und Schüler darauf hinzuweisen,
dass die Wörter „Einwirkung“ und „einwirken“ im Alltag in mannigfacher Weise auch für
nichtphysikalische Vorgänge benutzt werden. Zum Beispiel könnte Andrea versuchen, auf
ihre aus irgendwelchen Gründen gedrückte Banknachbarin aufheiternd einzuwirken.
v
v
v
Abb. 5: Resultierender Kraftvektor Fres für zwei am selben Punkt (A) angreifende Kraftvektoren F1 und F2 (mit
durchgeführter Vektoraddition)
Ein ausgewähltes reales Objekt ist meist mehreren gleichzeitigen Einwirkungen aus seiner
Umgebung ausgesetzt. In diesem Fall muss dann auch mehr als ein Kraftvektor an das reale
Objekt gezeichnet werden. Manchmal kommt es vor, dass einige oder gar alle gleichzeitigen
Einwirkungen denselben Angriffspunkt haben. Für diesen Fall hat Newton herausgefunden,
dass diese Kraftvektoren durch einen einzigen, den sogenannten resultierenden Kraftvektor
v
F res (mit demselben Angriffspunkt) ersetzt werden dürfen. Dieser ist nach den Regeln der
(geometrischen) Vektoraddition zu bilden ist. Die Bezeichnung Kraftvektor ist aus diesem
Grund sinnvoll. [vgl. PRONEGG 1993, S. 3.9f.]
26
Beim Durchblättern der Abschnitte über die Einführung der „Kräfte“ in den Schulbüchern wird der Eindruck der „Kraftvektor“ sei das selbstverständlichste Konzept überhaupt
erweckt. Es ist kaum davon die Rede, dass der Einfall Einwirkungen auf reale Objekte auf
diese Weise zu modellieren außergewöhnlich ist. Doch wenn wir uns in Erinnerung rufen,
dass in den drei Gesetzen Keplers über die Planetenbewegung zwar die geometrischen Modellbausteine „Ellipse“, „Ellipsenbrennpunkt“, „Große Halbachse“ „Umlaufszeit“ und „Radiusvektor“ vorkommen, aber keine Kraft, und dass zwar in Galileis Modell der Fallbewegung der
geometrische Modellbaustein „Beschleunigung“ vorkommt, aber keine Kraft, dann erkennen
wir, dass Newtons Erfindung des „Kraftvektors“ zur Modellierung der Einwirkung eines realen
Objektes auf ein anderes ein genialer Einfall war. Wir sollten ihn deshalb in unserem Unterricht entsprechend würdigen!
Im Unterricht sollten ebenso unbedingt die in vielen Schulbüchern zu findenden,
völlig falschen „Definitionen der Kraft über die durch sie hervorgerufene Beschleunigung“
besprochen werden. Dies sollte etwa in jenem Umfang, der sich in Kapitel 2. am Ende meiner Besprechung des Lehrbuches von Schreiner findet (vgl. S. 10f.), geschehen.
3.3. Wie modelliert die Newtonsche Mechanik
reale Objekte?
Nachdem wir im vorigen Kapitel im „Kraftvektor“ ein geeignetes Konzept für die Modellierung von Einwirkungen auf reale Objekte eingeführt haben, müssen wir uns nun konsequenterweise der geeigneten Modellierung dieser realen Objekte selbst zuwenden. Dazu
entdeckte Newton, dass in vielen Situationen nur zwei Merkmale von den realen Objekten
als wesentlich beibehalten werden müssen. Eines davon ist das vertrautere Merkmal „Ort“
des realen Objektes. Das andere ist seine „Masse“. Dagegen ist zum Beispiel das Merkmal
„Farbe“ eines realen Objektes in der Newtonschen Mechanik unwichtig. Veranschaulichen
wir uns dies wieder an der Einwirkung „Fußtritt“ auf das reale Objekt „Fußball“. Die Reaktion
des Balles hängt sicherlich nicht davon ab, ob dieser nun gelb, blau, grün oder gemustert ist.
Ebenso irrelevant ist das Obermaterial, aus dem der Ball gefertigt wurde, oder dessen „Geruch“ und „Temperatur“. Die Reaktion auf den Fußtritt bleibt die selbe.
Gemäß der umgangssprachlichen Bedeutung des Wortes „Ort“ ist dies die Stelle, an
der sich das reale Objekt zu verschiedenen Zeitpunkten befindet. Obwohl hier mit dem „Ort“
auch das Konzept „Zeit“ sozusagen durch die Hintertür die Arena der „Newtonschen Mechanik“ betreten hat, verschiebe ich die tiefere Diskussion der Konzepte „wo“ und „wann“ der
27
Übersichtlichkeit halber auf das Kapitel 3.4..
Für welche Vorgänge können wir hoffen, dass das Merkmal „Ort“ für die Beschreibung der Bewegung eines realen Objektes ausreicht? Dies ist wohl immer dann der Fall,
wenn wir das Objekt umgangsprachlich als „kompakt“ bezeichnen würden. Von kompakt
sprechen wir, wenn entweder das betrachtete Objekt klein gegenüber den anderen interessanten Dimensionen des betrachteten Vorganges ist, oder wenn nur nach der Grobbewegung des realen Objektes gefragt wird (also kein Interesse an überlagerten Dreh- und
anderen Detailbewegungen besteht) [vgl. PRONEGG 1993, S. 4.10]
Durchblättern man – so wie wir dies im Falle der Erfindung der Kräfte taten – in den
Schulbüchern die Abschnitte über die Einführung der Masse, so hat man erneut den Eindruck, als wäre dies wieder ein völlig selbstverständliches Konzept, das nur noch zu „messen“ ist. Diese Messung, zusammen mit einer interessanten wissenschaftstheoretischen
Bemerkung, verschiebe ich auf das Kapitel 3.7.. Hier stelle ich nur bedauernd fest, dass in
den Schulbüchern wieder kein Wort davon steht, dass man erst den genialen Einfall haben
muss, bei der einfachen Modellierung von realen Objekten mit dem Konzept „Masse“ so erfolgreich sein zu können. Denn wieder können wir aus dem Fehlen einer Masse in den drei
Gesetzen Keplers über die Planetenbewegung und im Galileieschen Gesetz des Fallens von
Körpern unter Vernachlässigung der Luftreibung erkennen, dass Newtons Erfindung der
„Masse“ ein genialer Einfall war. Wir sollten ihn daher in unserem Unterricht entsprechend
würdigen! Würde sich die „Masse“ jedem intelligenten Menschen automatisch aufdrängen,
dann hätten auch diese beiden großen Köpfe der Physik im Handumdrehen darauf kommen
müssen! Im Schulunterricht bleibt natürlich keine Zeit für eine eingehendere Behandlung der
Masse, so dass wir uns mit dem bloßen Hinweis auf diesen Geniestreich Newtons zufrieden
geben müssen. Wer mehr dazu wissen möchte, sei auf [JAMMER 2000] verwiesen.
Durch welche „Steine“ aus dem mathematischen Baukasten lassen sich nun diese
beiden Merkmale „Ort“ und „Masse“ mathematisch modellieren? Für die aufeinanderfolgenden „Orte“ des Objektes ist eine (im Allgemeinen dreidimensionale) „Bahnkurve mit Zeitmarv
ken“, {x(t), y(t), z(t)} ≡ x(t) der passende Baustein. Eine reelle Zahl, m, ist dies für die Masse.
Dieses von Newton entworfene einfache Modell für reale Objekte wird als „das Modell des
Massenpunktes“ bezeichnet.
Wollen wir mehr Merkmale als bloß „Ort“ und „Masse“ als wichtig mitnehmen, dann
wird das zugehörige Modell notwendig um diese Merkmale aufwendiger. Eine solche Möglichkeit ist der „Starre Körper“. Dazu greifen wir, wenn uns die Modellierung eines realen Objektes durch einen einfachen Massenpunkt nicht mehr genügt. Zum Beispiel ist es nötig, die
Ausdehnung eines Autos zu berücksichtigen, wenn „das Bremsen mit zwei Rädern auf Asphalt und zwei Rädern auf Eis“ – eventuell verbunden mit Schleudern - modelliert werden
soll. Wird die Ausdehnung des Autos hingegen nicht berücksichtigt und das Modell Massen28
punkt verwendet, so findet die Drehung der Karosserie in diesem zu einfachen Modell keine
Entsprechung. Durch die Aufnahme der Eigenschaft „Ausdehnung mit Form“ - neben der
Masse und dem momentanen Ort - entsteht eine neues Modell, der sogenannte „Starre Körper“. Dabei nehmen wir in das Modell die vereinfachende Annahme auf, dass das reale Objekt aus sehr vielen Massenpunkten besteht, die im Zeitablauf ihren gegenseitigen Abstand
nicht ändern. Zu beachten ist, dass wir dadurch, dass wir den „Starren Körper“ als Ansammlung von Massenpunkten auffassen, uns beim neuen (aufwendigeren) Modell „Starrer Körper“ das uns schon vertraute (einfachere) Modell „Massenpunkt“ zu Nutze machen. Dies ist
eine ganz allgemeine Vorgangsweise, die wir Menschen auch im Alltag immer wieder nutzen: Wir versuchen das Neue so gut es geht auf das bereits Vertraute zurückzuführen.
Manchmal reicht auch die Modellierung eines realen Objektes durch einen „Starren Körper“
nicht mehr aus. Nämlich dann, wenn wir das Merkmal „Elastizität“ mitnehmen wollen. Denken wir nur an die Bauteile von Maschinen, die allen möglichen Belastungen ausgesetzt
sind, und die brechen, wenn ihre elastischen Eigenschaften überfordert werden. Angesichts
dessen wird uns die Bedeutung eines Modells für solche reale Objekte bewusst. Natürlich
gehen wir den oben angedeuteten Weg weiter und versuchen das Modell des „Elastischen
Körpers“ wieder mit dem Modell des „Starren Körpers“ in Zusammenhang zu bringen. Dies
geschieht, indem wir festhalten, dass beim „Elastischen Körper“ die Verbindungen zwischen
den Massenpunkten nicht ganz starr, sondern als leicht veränderlich angesehen werden. Ein
schulgerechtes Beispiel dafür wäre das reale Objekt „Radiergummi“.
Bei der Beschreibung von realen Objekten und Einwirkungen aus deren Umgebung
ist darauf zu achten, dass die Modellierung einer Einwirkung als Kraftvektor und die Modellierung eines realen Objektes als Massenpunkt verträglich sein müssen. Der Angriffspunkt
einer Einwirkung verliert bei der Modellierung als Massenpunkt seinen Sinn, da hier notwendig der momentane Ort identisch mit dem Angriffspunkt aller als Kraftvektoren modellierbaren Einwirkungen sein muss. Das Modell Massenpunkt für ein reales Objekt ist somit nur
dann sinnvoll, wenn die Angriffspunkte verschiedener Kraftvektoren sozusagen ununterscheidbar sind. Im Falle eines Pressballes sind zum Beispiel die Angriffspunkte der beiden
Einwirkungen Fußtritte nicht identisch. Das Modell Massenpunkt ist hier dann nicht zur Beschreibung des Ablaufes des Ereignisses geeignet,
wenn nicht beide Tritte genau zentral erfolgen. Ein
„Wegspritzen“ des Balles mehr oder weniger senkrecht
zu den beiden Fußtritten könnte mit dem Massenpunktmodell nicht vorhergesagt werden.
Da Newton seine Mechanik mit dem Massenpunkt als
Abb. 6: Pressball
Modell für reale Objekte formulierte, werde ich mich im
Folgenden auf dieses Modell beschränken.
29
3.4. Die Modellbausteine „Bezugssystem“ und „Bahnkurve“
Am Beginn des vorangegangenen Abschnittes wurde der Massenpunkt durch seine Masse
und seinen Ort zu verschiedenen Zeitpunkten modelliert. Wir werden weiter unten finden,
dass die Newtonsche Mechanik aus dem Anfangsort und der Anfangsgeschwindigkeit eines
Massenpunktes seinen Ort zu jedem späteren Zeitpunkt vorherzusagen gestattet, wenn zu
jedem Zeitpunkt die Kräfte auf diesen Massenpunkt bekannt sind. Streng genommen erhalten wir nur eine Vorhersage für die zugehörigen mathematischen Bausteine in der Form
v
x(t) = {x(t), y(t), z(t)}. Deshalb müssen wir uns fragen, auf welche Weise wir diese Vorhersage in der Realität auf ihre Brauchbarkeit prüfen können: Wie übertragen wir zum Beispiel
x und t auf etwas, was in der Wirklichkeit vorkommt? Wenn unser Fußballer den Ball bei einem Freistoß elegant über die „Mauer“ hebt, sehen wir kein x und kein t. Wie wissen wir also, ob die Voraussage der Newtonschen Mechanik für die Bahn des Fußballes auch in der
Realität brauchbar ist?
Bezüglich t tun wir uns leicht: Wir behaupten einfach, dass t zum Beispiel mit der Anzeige auf unserer Armbanduhr übereinstimmt. Dies ist zwar eine weitere Behauptung, doch
wir wissen aus vielen Versuchen, dass dies eine äußerst brauchbare Behauptung ist, da mit
ihr sehr gute Übereinstimmung mit den Vorhersagen der Newtonschen Mechanik erreicht
wird. Bezüglich x, y und z müssen wir uns bewusst machen, dass der Ort eines realen Objektes überhaupt nur relativ zu anderen realen Objekten angegeben werden kann. Wenn wir
bei unserem Fußballspiel etwa sagen, der Spieler so und so spielt „halb links“, dann beziehen wir seinen Ort auf die Spielfeldgrenzen als Bezugsobjekt. Aber auch bei den Bezugsobjekten können wir von den meisten ihrer Eigenschaften absehen: Ob die Outlinien, wie beim
Fußball mit Kreidestaub auf dem Rasen markiert sind, oder ob sie wie beim Tennis als Streifen auf den Belag aufgeklebt sind, spielt keine Rolle. Wichtig ist nur, dass sie (in den genannten einfachen Fällen) rechtwinklige Gerade sind und voneinander jene ganz
bestimmten, mit dem Maßband gemessenen, Abstände haben, die die Spielregeln vorschreiben.
Da sowohl beim Tennis als auch beim Fußball die Höhe des Balles über dem Spielfeld ohne Belang ist, kann man sich dort auf ein ebenes Bezugssystem von Linien beschränken. Im Hochsprung ist allerdings auch die Höhe wichtig, so dass dort ein dreidimensionales
Bezugssystem verwendet wird. In der Schulmechanik beschränken wir uns der Einfachheit
halber meist auf ein ebenes Bezugssystem, wenn auch ein dreidimensionales der betrachteten Situation oft besser angepasst wäre.
30
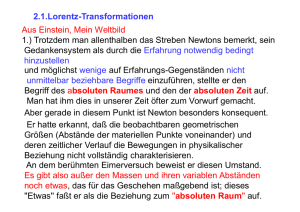
Abb. 7: Mögliche Bezugssysteme zur Beschreibung des realen Objektes „Vogel“
Die obige Abb. 7 deutet drei mögliche Bezugssysteme zur Beschreibung des momentanen
Ortes des (als Massenpunkt modellierten) realen Objektes „Vogel“ an. Es sind ebenso andere Bezugssystem denkbar.
Beim Fußball, Tennis und beim Hochsprung genügt schon das Bezugssystem allein,
um die wesentlichen Aussagen „Ball außerhalb des Spielfeldes“ oder „derzeitige Höhe übersprungen“ machen zu können. Denn ob der Tennisball eine Hand breit oder zwei Meter im
„Out“ landet ist egal, ebenso ob die Hochspringerin die geforderte Höhe knapp oder klar überspringt.
In der Mechanik sind die Ansprüche an die Genauigkeit höher. Haben wir in Abb. 7
das Bezugssystem Auto gewählt, um die augenblickliche Position des realen Objektes „Vogel“ anzugeben, so können wir nur Aussagen der folgenden Art machen: Der Vogel fliegt
gerade direkt über dem Auto oder er befindet sich vor dem Auto auf der linken Seite. Damit
die Angabe des momentanen Ortes eines Massenpunktes präziser wird, statten wir ein festgelegtes Bezugssystem mit einem Koordinatensystem aus. Dieses mathematische Objekt
zur Kennzeichnung der Punkte des Raumbereiches, durch den der Vogel fliegt, ist für diesen
Zweck offenbar bestens geeignet. Ein bestimmter Ort, also ein Raumpunkt, wird mit Zahlen,
den sogenannten Ortskoordinaten, markiert.
Einige Koordinatensysteme haben sich im Laufe der Zeit als besonders zweckmäßig
für die Beschreibung der Lage von Punkten erwiesen. Dazu zählen die (zweidimensionalen)
kartesischen Koordinaten und die ebenen Polarkoordinaten, die zur Festlegung der Position
eines Punktes in der Ebene dienen, sowie die (dreidimensionalen) kartesischen Koordinaten,
die Zylinderkoordinaten und die Kugelkoordinaten, mit denen die Lage eines Punktes im
Raum angegeben werden kann. Da ein Blick in die Schulen jedoch zeigt, dass im gängigen
31
Unterricht ausschließlich kartesische Koordinatensysteme verwendet werden2, werde ich
mich im Weiteren auf diese beschränken. Ich werde folglich meine Bezugssysteme immer
mit diesen Koordinatensystemen ausstatten.
An einem Beispiel betrachten wir, wie dies im Detail aussieht: Wir beschreiben den
momentanen Ort eines als Massenpunkt modellierten Kugelschreibers, der vom Schreibtisch
auf den Fußboden gefallen ist. Dazu legen wir zuerst ein Bezugssystem fest, zum Beispiel
den Fußboden. Danach wählen wir einen Koordinatenursprung aus, um von diesem ausgehend das kartesische Koordinatensystem aufzubauen. Eine mögliche Wahl ist die rechte
obere Fußbodenecke. Diesen gewählten Koordinatenursprung bezeichnen wir mit O. Darauf aufbauend errichten wir die zwei Koordinatenachsen
– die in einem kartesischen Koordinatensystem
aufeinander senkrecht stehen – und bezeichnen
sie mit x und y. Natürlich bieten sich die Schnittlinien des Fußbodens mit den Zimmerwänden als
Koordinatenachsen an. Genauso erlaubt wäre
aber auch jede andere Wahl zweier senkrecht
aufeinander stehenden Achsen. Die Position des
als Massenpunkt modellierten Kugelschreibers
auf dem Fußboden soll nun durch die (kartesischen) Koordinaten angegeben werden, welche
die Entfernung von den Koordinatenachsen darstellen werden. Um diese zu bestimmen, nehmen
Abb. 8: Bezugssystem „Fußboden“ zur Beschreibung der Position des realen Objektes
„Kugelschreiber“ (K)
wir einen Maßstab zu Hilfe. Mit diesem tragen wir
auf den Koordinatenachsen in äquidistanten Abständen Längenmarken ab. Nun können wir
die entsprechenden Entfernungen bestimmen. Als x-Koordinate bezeichnen wir die Distanz
des Massenpunktes von der Koordinatenachse y und analog dazu die y-Koordinate als Distanz von der Koordinatenachse x.
Die in einem Bezugssystem mit Hilfe eines Koordinatensystems und eines Maßstabes erhaltene Information über den momentanen Ort eines Massenpunktes fassen wir – wie
v
oben bereits angedeutet - mit Hilfe des mathematischen Objektes Ortsvektor x = {x, y} zusammen (vgl. Abb. 9). Dieser wird immer vom Ursprung des Koordinatensystems aus gev
zeichnet. Die Koordinaten des Ortsvektors x unseres Kugelschreibers sind {3, 1}, wobei die
2
Die Polarkoordinaten werden im Mathematikschulbuch der sechsten Klasse AHS kurz angesprochen [vgl.
REICHEL 1992, S. 65], während die Kugelkoordinaten in keinem Schulbuch von der fünften bis zur achten Klasse
AHS zu finden sind. Diese sind den Schülerinnen und Schülern aber vielleicht gerade noch als geographische
Koordinaten zur Bestimmung der Lage von Punkten auf der Erdoberfläche bekannt.
32
x-Koordinate 3 die Entfernung von der Koordinatenachse y und die y-Koordinate 1 die Entfernung von der Koordinatenachse x angibt.
Zusammenfassend möchte ich zur Beschreibung des momentanen Ortes eines Massenpunktes im Raum sagen: Die Position eines Massenpunktes wird immer relativ zu einem
Bezugssystem angegeben, das vom Beobachter festgelegt wird. Dieses ist mit einem (im
Allgemeinen dreidimensionalen) kartesischen Koordinatensystem ausgestattet. Der momentane Ort wird durch drei Ortskoordinaten bestimmt, welche mit Hilfe eines Maßstabes ermittelt werden. Diese bezeichnen wir mit x, y, z und fassen sie zum mathematischen Objekt
v
Ortsvektor x = {x, y, z} zusammen (vgl. Abb. 10).
v
Abb. 9: Orstvektor x des realen Objek-
tes „Kugelschreiber“ relativ zum Bezugs-
v
Abb. 10: Ortsvektor x im Raum
system „Fußboden“
v
Bewegt sich der durch den Ortsvektor x beschriebene Massenpunkt im Zeitablauf (wie es in
der Mechanik ja typischerweise der Fall ist), so wird der Massenpunkt zu jedem Zeitpunkt
v
durch einen anderen Ortsvektor x beschrieben. Diesen markieren wir mit dem Zeitpunkt t,
v
zu dem er gerade gilt: x (t) = {x(t), y(t), z(t)}. Alle diese Ortsvektoren zusammen nennen wir
die Bahnkurve des Massenpunktes.
33
Abb. 11: Bahnkurve eines Massenpunktes relativ zu einem Bezugssystem
Ein Punkt zu den verwendeten Maßstäben und Uhren muss noch erwähnt werden: Wir postulieren über die in der Newtonschen Mechanik verwendeten Maßstäbe und Uhren, dass
diese Messgeräte von ihrer Umgebung völlig unbeeinflusst sind. Sie dürfen also ihre Eigenschaften nicht ändern, wenn sie in eine andere Umgebung gebracht werden oder sich ihre
Umgebung ändert. Solche werden Standardmaßstäbe beziehungsweise Standarduhren genannt.
Es können somit in der Newtonschen Mechanik nicht alle Maßstäbe und Uhren, die überhaupt existieren, als Messgeräte eingesetzt werden. Welche sind das? Eine lange weiche
Spiralfeder ist zum Beispiel kein Standardmaßstab. Dies kann anschaulich gezeigt werden:
Wir legen eine weiche Spiralfeder auf einen Tisch und bringen in äquidistanten Abständen –
diese sind durch eine bestimmte Anzahl an Windungen erkennbar - rote Fähnchen an. Stellen wir die so gekennzeichnete Feder senkrecht auf, dann ist vor allem der untere Teil durch
das darauf lastende Gewicht zusammengestaucht. Die Distanzen, die von den roten Fähnchen markiert werden, sind nun nicht mehr gleich groß. Die Spiralfeder hat also ihre Eigenschaften aufgrund des Einflusses ihrer Umgebung -
der
Gravitation - verändert. Damit verletzt sie unser
Postulat.
34
Abb. 12: Spiralfeder mit Fähnchen liegend
Abb. 13: Spiralfeder mit Fähnchen stehend
Auch eine Pendeluhr gehört nicht zur Klasse der Standarduhren. Ihre Schwingungsdauer
hängt wesentlich von der Gravitation ab. Eine Pendeluhr geht auf dem Mond ganz anders als
auf dem Jupiter. Ja nicht einmal auf allen Punkten der (rotierenden!) Erdoberfläche ist die
Schwingungsdauer gleich.
Wird die Bewegung eines Massenpunktes in verschiedenen Bezugssystemen dargestellt, so hängt die erhaltene Bahnkurve von der Wahl des selben ab. Um dies zu
veranschaulichen, beobachten wir einen Slalomläufer, der
gleichzeitig von zwei Kameras des selben Typs gefilmt wird.
Die Kamera 1 wird während des Filmens in fester Position –
zum Beispiel mit Hilfe eines Stativs – gehalten. Im Gegensatz
dazu versucht der Kameramann die Kamera 2 mit dem Schisportler mitzuführen. Da wir ganz natürlich die Position des
Slalomläufers auf den jeweiligen Bildrand beziehen, ist dieses
unser jeweiliges Bezugssystem. Nehmen wir an, die einge-
Abb. 14: Slalomläufer
setzten Kameras seien mit einer eingeblendeten Uhrzeit ausgestattet. Mit Hilfe dieser Funktion kann der momentane Ort des Schisportlers (modelliert als
Massenpunkt) und der dazugehörige Zeitpunkt festgelegt werden.
Im Falle der in Position gehaltenen Kamera befindet sich der Slalomläufer anfangs im
Bild ganz oben. Während er die ihm entgegenkommenden Tore wegboxt, rutscht er im Bild
immer weiter nach unten, bis er schließlich aus dem Blickfeld der Kamera verschwindet.
Aufgrund der eingebauten Uhr ist jedes Bild mit dem dazugehörigen Zeitpunkt versehen. Es
ist somit möglich, die Bilder, die die Position des Slalomläufers ein, zwei, drei, vier, … Sekunden nach Filmbeginn zeigen, übereinander zu legen. Wir erhalten auf diese Weise die
Bahnkurve des gefilmten Schisportlers relativ zum Bezugssystem Kamera 1.
Da die Kamera 2 ständig mit dem Slalomläufer mitgeführt wird, befindet sich dieser
immer ungefähr in der Mitte des Bildes. Legen wir nun erneut die Bilder von den Zeitpunkten
ein, zwei, drei, vier, … Sekunden nach Filmbeginn übereinander, erhalten wir wieder die
35
Bahnkurve des Slalomläufers relativ zum Bezugssystem Kamera 2. Klarerweise weicht die
Gestalt der Bahnkurve 2 deutlich von der Bahnkurve 1 ab.
Abb. 15: Bahnkurve des Slalomläufers relativ zum gewählten Bezugssystem – (a) Kamera 1 und (b) Kamera 2
3.5. Wie modelliert die Newtonsche Mechanik
die Reaktion von realen Objekten auf
Einwirkungen aus deren Umgebung?
Nach Einführung der Modelle „Massenpunkt“ und „Kraft“ ist nun noch die Modellierung des
verbliebenen letzten Inhalts des linken oberen Kästchens ausständig, nämlich die Reaktion
eines als Massenpunkt modellierten realen Objektes auf Einwirkungen aus seiner Umgebung. Newton hat entdeckt, dass diese Reaktion durch das Konzept „Beschleunigung“ (das
bereits Galilei ‚erfunden‘ hatte!) bestens modelliert werden kann.
Die „Beschleunigung“ wird, wie ich gleich ausführlich zeigen werde, auf ganz bestimmte Weise aus der Bahn des Massenpunktes gewonnen wird. Daher lautet Newtons
Vorschlag mit anderen Worten, dass sich die Reaktion eines Massenpunktes auf Einwirkungen von außen im Verlauf der eingeschlagenen Bahn manifestiert. Nehmen wir wieder unser
reales Objekt „Fußball“ zu Hilfe: Schießt ein Spieler aufs Tor, so versuchen der Tormann und
jene Abwehrspieler, die sich in Tornähe befinden, den Ball aus seiner „gefährlichen“ Bahn
abzulenken. Gelingt es einem von ihnen, dem Ball vor dem Tor einen seitlichen Tritt
zu geben, so fliegt dieser am Tor vorbei. Die Einwirkung „Fußtritt“ hat also bewirkt, dass der
Fußball seine ursprüngliche Bahn direkt auf das Tor geändert hat. Auch wenn der Tormann
36
den Ball fängt oder mit einer erfolgreichen Faustabwehr zurückschlägt, ändert sich die Bahn
des Fußballes auf Grund dieser Einwirkungen.
Was ist nun die „Beschleunigung“? Der von Newton vorgeschlagene Modellbaustein
ist ein Vektor, der auf folgende Weise erhalten wird: Wir nehmen an, wir hätten die Bahnkurve eines Massenpunktes relativ zu einem ausgewählten Bezugssystem aufgenommen. Zu
v
dieser konstruieren wir zu jedem Zeitpunkt t einen Geschwindigkeitsvektor v(t) . Wie wir im
vorigen Abschnitt gesehen haben, wird die Bahnkurve eines Massenpunktes aus den Endpunkten seiner aufeinander folgenden Ortsvektoren gebildet. In der Abb. 16 haben wir zwei
Ortsvektoren, den mit der Zeitmarke t und den mit
der Zeitmarke t + ∆t herausgegriffen. Wir bilden
nun die Differenz dieser beiden Ortsvektoren und
v
v
erhalten den Differenzenvektor x (t+∆t) - x (t),
v
welchen wir in der Abb. 16 mit ∆ x (t) bezeichnet
haben. Diesen Vektor dividieren wir nun durch die
Differenz der Zeitmarken ∆t, also der Zeit, die der
Massenpunkt für das Zurücklegen der Strecke
v
v
von x (t) nach x (t+∆t) benötigt hat. Auf diese
v
Abb. 16: Konstruktion des Geschwindigkeits∆x(t)
v
Weise erhalten wir den Vektor
vektors v(t)
∆t
v
(Da ∆ x als Differenz zweier Vektorgrößen wieder ein Vektor ist und wir diesen durch den
v
∆x(t)
ein Vektor).
Skalar ∆t dividieren, ist auch
∆t
Hier erhebt sich die Frage, weshalb wir gerade die beiden Orstvektoren mit den Zeitmarken t und t + ∆t herausgegriffen haben. Hätten wir nicht ebenso gut die Zeitmarken t und
t + 0,8∆t und die Differenz der zugehörigen Ortsvektoren nehmen können? Wir hätten dann
v
v
x(t + 0,8 ∆t) - x(t)
einen etwas anders gerichteten und etwas anders langen Quotienten
erhal0,8 ∆t
ten. Aber auch 0,8∆t erscheint uns reichlich willkürlich. Was wäre bei irgend einer anderen
Wahl? Grundsätzlich würden wir dafür zunächst einschränkend vermuten, dass es nicht zu
groß sein soll, aber wie groß? Ein Fan vom Kunstbahn-Rodeln, wo tausendstel Sekunden
über Sieg und Niederlage entscheiden, könnte versucht sein, ein Zeitintervall ∆t in diesem
Bereich zu wählen, während einer am Sport weniger interessierten Person ein Intervall im
Zehntelsekunden- oder sogar im Sekundenbereich ausreichend erscheinen könnte.
Mit unserer Frage sind wir bereits inmitten des Problems, dass die Wahl der Größe
von ∆t offensichtlich ein Teil des Modells „Newtonsche Mechanik“ ist! Denn wenn wir an dieser Stelle eine bestimmte Wahl von ∆t treffen, dann erscheint dieses ∆t auch in allen Vorher-
37
sagen, die wir später mit dem Modell „Newtonsche Mechanik“ machen werden. Fragen wir
also Newton selbst, welche Wahl er für ∆t traf, um seine Mechanik zu einem erfolgreichen
Modell zu machen. Newton trachtete, die Größe von ∆t überhaupt loszuwerden. Dies gelang
v
∆x(t)
für immer kleinere ∆t (wobei zwar sowohl
ihm, indem er erkannte, dass der Quotient
∆t
der Zähler für sich ein immer kürzerer Vektor und der Nenner für sich eine immer kleinere
v
∆x(t)
Zahl werden) einem festen Wert zustrebt. Erst dieser „Grenzwert des Quotienten
“, von
∆t
dem wir aus dem Mathematikunterricht wissen, dass er auch Differenzialquotient heißt und
so geschrieben wird,
lim
∆t → 0
v
∆x(t)
∆t
v
=: v(t)
v
war für Newton die Geschwindigkeit des Massenpunktes zur Zeit t, v(t) . Wir wollen uns also
bewusst bleiben, dass in der Newtonschen Mechanik gewisse Differentialquotienten zu den
Bausteinen des zugehörigen mathematischen Modells gehören, was keineswegs selbstverständlich ist.
v
Wir sehen in der obigen Abb. 16, dass die Geschwindigkeitsvektoren v(t) (gemäß ihrer Herkunft als Grenzwerte von Sehnenvektoren) immer tangential an die Bahnkurve sind.
An ihrer Länge können wir den Betrag der Geschwindigkeit ablesen. Ein Massenpunkt bewegt sich um so schneller, je größer die Distanz ist, die er in einem bestimmten Zeitraum
zurücklegt.
38
v
Abb. 17: v (t1): Langsame Bewegung, denn der Abstand zwischen den Zeitmarken t1 und t2 ist klein;
v
v (t8): Schnelle Bewegung, denn der Abstand zwischen den Zeitmarken t8 und t9 ist groß
So viel zur Geschwindigkeit, die aber nicht der von Newton als sehr brauchbar gefundene Modellbaustein für die Reaktion eines als Massenpunkt modellierten realen Objektes
v
auf Einwirkungen von außen angegeben wurde; dies ist vielmehr die „Beschleunigung“ a (t).
Wie finden wir aus der bisherigen Analyse der Bahnkurve die Beschleunigung? Dazu benötiv
gen wir die „Differenz“ zweier „auf einander folgenden“ Geschwindigkeitsvektoren v (t) und
v
v (t+∆t). Da diese beiden Vektoren aber nicht am selben Punkt entspringen, ist es nicht mögv
v
lich, sie voneinander zu subtrahieren. Der Begriff „Differenz von v (t) und v (t+∆t)“ existiert
gar nicht! (Die Mathematik lehrt uns, dass nur Vektoren subtrahiert werden können, die vom
selben Punkt ausgehen) Was können wir also in dieser Situation tun, um dennoch zu einer
Differenz zu kommen? Wir benötigen offenbar ein „Hilfsmittel“, um den Geschwindigkeitsvekv
v
tor v (t+∆t) an den Ausgangspunkt von v (t) zu bringen. In mathematischer Redeweise umschreiben wir dieses „Hilfsmittel“ mit dem Satz: „Es muss eine Vorschrift gegeben sein, mit
der wir einen Vektor von einem Punkt einer Bahnkurve zu einem anderen Punkt dieser
Bahnkurve transportieren können“. Die Erfahrung lehrt uns, dass wir in der Newtonschen
Mechanik dann den geeigneten „Vektortransport“ benutzen, wenn wir dem „Euklidischen
Verfahren“ folgen, das alle Schülerinnen und Schüler als das „Parallelverschieben (mit Dreieck und Lineal)“ kennen.
39
Abb. 18: Transport des Geschwindigkeitsvektors
v
v (t+∆t)
v
Abb. 19: Konstruktion des Beschleunigungsvektors a (t)
Mit diesem „Euklidischen Vektortransport“ verschieben wir nun den Geschwindigkeitsvektor
v
v
v
v (t+∆t) vom Ausgangsort x (t+∆t) zum Zielort x (t), wo wir nun die Vektorsubtraktion durchv
v
v
führen können. Dabei erhalten wir den Differenzvektor ∆ v (t) := v (t+∆t)transportiert - v (t). Diesen dividieren wir wieder durch ∆t und bilden anschließend Limes ∆t → 0, um auch hier von
der Größe von ∆t unabhängig zu werden. Als Ergebnis erhalten wir
lim
∆t → 0
v
∆v(t)
∆t
v
:= a (t),
v
den von Newton eingeführten Modellbaustein Beschleunigungsvektor a (t).
Um den Schülerinnen und Schülern aber bewusst zu machen, dass die Bildung der
Beschleunigung über den „Euklidischen Vektortransport“ mit Lineal und Dreieck keineswegs
selbstverständlich ist, betrachten wir die Flugbahn eines Transatlantikverkehrsflugzeuges
von Frankfurt nach Los Angeles. Diese modellieren wir auf dem Globus aus dem Geographiekabinett als Großkreis zwischen den Punkten Frankfurt und Los Angeles. Anschließend
v
konstruieren wir an verschiedenen Punkten die Geschwindigkeitsvektoren v (t). Um die Beschleunigung des Flugzeuges an bestimmten Stellen zu erhalten, müssen wir die Differenz
zweier Geschwindigkeitsvektoren bilden. Es stellt sich nun aber das Problem, auf welche Art
und Weise ein Geschwindigkeitsvektor transportiert werden soll. Denn dies ist hier nicht
mehr so einfach mit Lineal und Dreieck durchzuführen, wie im Fall einer Bahnkurve auf einem ebenen Blatt Papier. Man denke sich nur an zwei verschiedenen Stellen des Globus je
ein Essstäbchen aus dem China-Restaurant mit Tesafilm angeklebt. Wie transportieren wir
das eine Essstäbchen „parallel“ zum anderen? Offenbar muss ein der gekrümmten (zweidi-
40
mensionalen) Geometrie einer Kugeloberfläche angepasster Vektortransport festgelegt werv
den. Das Gleiche gilt beim Transatlantikflugzeug für den Transport eines am Ort x (t) angev
hefteten Geschwindigkeitsvektor an den Ort x (t+∆), um die Beschleunigung konstruieren zu
können. Der folgende Vorschlag ist eine mögliche Variante: Wir belassen die Geschwindigkeitsvektoren in der lokalen Tangentialebene und bestimmen den Winkel zwischen dem zu
v
transportierenden Geschwindigkeitsvektor v (t+∆t) und dem Großkreis zwischen den Punkv
v
ten x (t) und x (t+∆t). Der Transport des Geschwindigkeitsvektors erfolgt nun entlang dem
Großkreis. Und zwar so, dass der Winkel zwischen dem transportierten Vektor
v
v (t+∆t)transportiert und dem Großkreis gleich bleibt. Nachdem der Geschwindigkeitsvektor an
seinem Zielort angelangt ist, kann die Vektorsubtraktion durchgeführt und somit die Bev
schleunigung a (t) gebildet werden. Der erhaltene Vektor liegt in der Tangentialebene.
Durch den in einem Bezugssystem mit Lineal und Dreieck durchführbaren Vektortransport wird eine bestimmte Klasse von Bahnkurven, nämlich die Geraden, unter allen anderen ausgezeichnet. Dies gibt uns Gelegenheit, unseren Schülerinnen und Schülern die
interessante Frage zu stellen, was eigentlich eine Gerade sei. Dazu zeichnen wir an eine auf
einem Blatt Papier vorliegende Kurve die Tangentenvektoren. Dann nehmen wir den „ersten“
Tangentenvektor und beginnen ihn entlang der Bahnkurve gemäß dem gegebenen Vektortransport „parallel“ zu verschieben. Ist der transportiere Anfangsvektor an allen Punkten der
Kurve parallel dem dort vorher gebildeten Tangentenvektor, dann ist die Bahnkurve eine
Gerade, relativ zum gegebenen Vektortransport.
Abb. 20: Bahnkurve eines Massenpunktes relativ zu einem
Bezugssystem – (a) Gerade (b) gekrümmte Linie
41
Da die Tangentenvektoren an eine Bahnkurve den Geschwindigkeitsvektoren (die es gibt,
wenn diese Kurve von einem Massenpunkt durchlaufen wird) proportional sind, sind für die
Klasse der Geraden die Geschwindigkeitsvektoren einander zu allen Zeitpunkten parallel.
Das bedeutet also, dass die Geschwindigkeitsrichtung des beobachteten Massenpunktes
konstant ist. Sind nun zusätzlich die Distanzen zwischen den an der Gerade angebrachten
Zeitmarken zu allen Zeitpunkten gleich, so ist der Geschwindigkeitsbetrag ebenfalls konstant. Wir können somit folgern: Ein Massenpunkt dessen Bahnkurve eine Gerade mit äquidistanten Zeitmarken ist, bewegt sich mit konstanter Geschwindigkeit.
Bevor wir dieses Kapitel abschließen, sollten wir unseren Schülerinnen und Schülern
bewusst machen, dass – so wie bereits mit den „Kräften“ und mit der „Masse“ auch die Nützlichkeit des Modellbausteins „Beschleunigung“ für die Mechanik keineswegs selbstverständ-
lich ist. Es wäre ja auch eine Welt vorstellbar, in der die Reaktion von Massenpunkten besser
durch die „dritte Ableitung“ der Bahnkurve modellierbar ist. Newton hat aber nachgewiesen,
dass die „Beschleunigung“ das erfolgreiche Konzept ist.
3.6. Die Verbindung der Modellbausteine
durch die Newtonschen Axiome
In den Kapiteln 3.1. – 3.5. haben wir die Klasse der Phänomene „Reaktion von realen Objekten auf Einwirkungen aus deren Umgebung“ in die Bestandteile „Einwirkungen auf reale Objekte“, „reale Objekte“ und „Reaktionen von realen Objekten“ zerlegt und in einem
Modellierungsschritt durch geeignete, möglichst einfache Modelle, ausschließlich aus mathematischen Bausteinen bestehende, ersetzt. Auf diese Weise haben wir die Modellbausteine „Kraftvektor“, „Massenpunkt“ und „Beschleunigungsvektor“ erhalten. Doch, wie bereits
beschrieben, kommt die Vielfalt eines Abschnittes der Lebenswelt nicht nur durch die Existenz einzelner Dinge, sondern mehr noch durch die zahlreichen gegenseitigen Einflüsse zustande. Wir müssen also nun noch die einzelnen Modellbausteine miteinander in Verbindung
bringen, um das umfassende Modell Newtonsche Mechanik für die Reaktion von realen Objekten auf Einwirkungen von außen zu erhalten.
Diesen Schritt hat Newton bereits vor mehr als dreihundert Jahren mit der Formulierung von drei Verbindungen (den drei „Newtonschen Axiomen“) zwischen den eben aufgezählten Modellbausteinen geleistet. Im Folgenden gebe ich diese allerdings nicht in Newtons
eigenen Worten wieder, sondern im Sinne unseres heutigen Verständnisses der Newton-
42
schen Mechanik. Da über die korrekte Interpretation der Newtonschen Axiome in den Schulbüchern krasse Fehlmeinungen kursieren, stelle ich jedem Axiom eine hinreichend ausführliche Erläuterung voran. Mit ihrer Hilfe macht dann die Formulierung der einzelnen Axiome,
die ja möglichst prägnant sein soll, erst Sinn.
Das erste dieser Axiome sagt etwas über die Brauchbarkeit eines gewählten Bezugssystems als Modellbaustein der Newtonschen Mechanik im Sinne des Abschnittes 3.4. aus.
Für die Konstruktion des Modellbausteins „Beschleunigung“ sind nämlich keineswegs alle
Bezugsysteme gleichwertig. So ist beispielsweise in Abb. 16(a) die fest montierte Kamera
ein geeignetes Bezugssystem, um aus der mit ihrer Hilfe aufgezeichneten Bahnkurve den
Modellbaustein „Beschleunigung“ im Sinne von Abschnitt 3.5. zu konstruieren. Für das Bezugssystem „mitgeführte Kamera“ ist dies hingegen ganz und gar nicht der Fall ist. Freilich
könnten wir auch für die damit aufgezeichnete Bahnkurve (vgl. Abb. 16(b)) formal im Sinne
des Abschnittes 3.5. eine (Pseudo-)Beschleunigung konstruieren. Nur wäre mit dieser Vektorgröße im Rahmen der Newtonschen Mechanik absolut nichts anzufangen! Wie könnten
v
sie mit a Pseudo(t) bezeichnen. Jene Bezugssysteme, die zu Bahnkurven führen, aus denen
v
eine für die Newtonsche Mechanik brauchbare Beschleunigung a (t) gewonnen werden
kann, heißen „Inertialsysteme“. Zum Unterschied von der obigen Pseudo-Beschleunigung
v
könnten wir diese Vektorgröße a Newton(t) nennen.
Wie lassen sich nun Inertialsysteme von Nicht-Inertialsystemen unterscheiden? Um
diese Frage für ein ins Auge gefasstes Bezugssystem zu beantworten, bestimmen wir relativ
zu diesem die Bahnkurve von realen Objekten, auf die keine Einwirkungen aus der Umgebung wirken. Per Postulat behaupten wir ja, dass wir jeder Situation alle Einwirkungen ansehen können. Es handelt sich dabei immer um „handfeste“ Kräfte – andere Kräfte gibt es
nicht. Zum Beispiel stößt etwas auf unseren Massenpunkt, oder seine Unterlage oder die
umgebende Luft behindert ihn durch Reibung, usw. An dieser (kräftefreien!) Bahnkurve überprüfen wir nun mit dem gegebenen Vektortransport, ob sie eine Gerade mit äquidistanten
Zeitmarken ist oder nicht. Falls eine Gerade vorliegt, ist das festgelegte Bezugssystem ein
Inertialsystem, sonst nicht.
Es gibt Bezugssysteme, in denen kräftefreie Bewegungen nicht eine Gerade als
Bahnkurve haben. Diese heißen „beschleunigte Bezugssysteme“. Betrachten wir beispielsweise die Bahnkurve eines kräftefreien Massenpunktes (weil er relativ zum Platz, auf dem –
in jeder größeren Stadt Frankreichs! - das Karussell steht, eine Gerade mit konstanten Zeitmarken als Bahnkurve durchläuft) von einem mit einem rotierenden Karussell verbundenen
Bezugssystem aus, so ist die Bahnkurve eine gekrümmte Linie und keine Gerade.
Folgt ein Massenpunkt in einem nicht-inertialen Bezugssystem einer Geraden, so
kann dies entweder teilweise von wirkenden „handfesten“ Kräften und teilweise vom gewählten Bezugssystem, oder - bei Abwesenheit von handfesten Kräften - zur Gänze von der
43
Wahl des Bezugssystems herrühren.
Mit diesen erklärenden Vorbereitungen sind wir nun in der Lage, das erste Newtonsche Axiom anders als in den Schulbüchern, aber im Sinne unseres heutigen Verständnisses der Newtonschen Mechanik zu formulieren:
h Erstes Newtonsches Axiom:
Es gibt spezielle Bezugssysteme. Diese werden Inertialsysteme genannt. Ein Inertialsystem
ist ein Bezugssystem, aus dem sich mit dem Euklidischen Vektortransport (mit Lineal und
Dreieck) ein im Rahmen der Newtonschen Mechanik brauchbarer Modellbaustein „Bev
schleunigung a Newton(t)“ ergibt.
Damit kommen wir zum zweiten Axiom, dem sogenannten „Newtonschen Bewegungsgesetz
für Massenpunkte“, das den Kern des Modells Newtonsche Mechanik darstellt. Es postuliert
für jeden Zeitpunkt t ein ganz bestimmtes Zusammenspiel der Modellbausteine „Kraftvektor“,
„Massenpunkt“ und „Newtonscher Beschleunigungsvektor“. Besonders bemerkenswert ist,
dass es sich dabei um einen sehr einfachen Zusammenhang handelt: Es ist erstaunlich,
dass Newton gerade jene wenigen wesentlichen Merkmale von Einwirkungen, realen Objekten und deren Reaktionen übrigbehalten hat, zwischen denen sich eine so schlichte Gesetzmäßigkeit finden ließ. Bevor ich jedoch dieses zweite Newtonsche Axiom prägnant
formuliere, wollen wir uns daran erinnern, dass wir einerseits per Postulat behaupten, zu
jedem Zeitpunkt t die auf einen Massenpunkt wirkenden Kräfte angeben zu können, ohne
dazu auch nur im Mindesten die durchlaufene Bahnkurve kennen zu müssen. Andererseits
wissen wir aus Abschnitt 3.5., dass wir allein aus der Bahnkurve eines Massenpunktes zu
v
jedem Zeitpunkt t dessen Newtonsche Beschleunigung a Newton(t) konstruieren können (natürlich nur, wenn die Bahnkurve relativ zu einem Inertialsystem aufgezeichnet wurde), ohne
jegliche Information über die wirkenden Kräfte. Außerdem können wir jedem als Massenpunkt modellierbaren realen Objekt eine Massenzahl m zuordnen, die ihrerseits völlig unabhängig von der durchlaufenen Bahnkurve und von den einwirkenden Kräften ist. Für diese
drei, völlig unabhängigen Größen postulierte Newton:
h Zweites Newtonsches Axiom:
v
Zu jedem Zeitpunkt ist die Vektorsumme F res(t) aller Kraftvektoren gleich dem Produkt aus
v
Masse m und der Newtonschen Beschleunigung a Newton(t),
v
v
m a Newton(t) = F res(t).
(3.6.1)
44
Die Newtonsche Bewegungsgleichung sagt uns somit, dass zwei unabhängig voneinander
bestimmbare Vektorgrößen einander zu jedem Zeitpunkt proportional sind (mit der von diesen Vektorgrößen ihrerseits unabhängigen Masse m als Proportionalitätsfaktor). Deshalb
läuft es der Intention Newtons vollkommen zuwider, die Bewegungsgleichung als Definition
der Kraft, also als
v
v
F res(t) := m a Newton(t)
(3.6.2)
zu interpretieren. Abgesehen von den Problemen, die wir uns mit einer solchen Auslegung
im Sinne meiner Kritik des Schulbuches von Schreiner am Ende von Abschnitt 2.1. einhandeln würden, wäre mit einer Definition (3.6.2) die Bestimmung der Bahn nicht möglich, mit
dem Gesetz (3.6.1) aber sehr wohl (vgl. dazu Anhang S. 65). Um den Schülerinnen und
Schülern zu zeigen, dass eine bloße Definition nichts leistet, schreibe man nur
v
a Newton(t) := lim
∆t → 0
v
∆v(t)
∆t
an die Tafel: Wie soll aus dieser (tatsächlichen) Definition die Bahnkurve berechnet werden?
Ein Spezialfall von (3.6.1) liegt vor, wenn es auf einen Massenpunkt keine Einwirkungen aus dessen Umgebung - also keine auf ihn wirkende Kräfte – gibt, oder wenn zwar Kräfte vorhanden sind, diese sich aber zum Nullvektor addieren (In diesem Fall sprechen wir von
einem Kräftegleichgewicht). Jedenfalls ist in diesen Fällen die resultierende Kraft zu jedem
v
v
Zeitpunkt t gleich Null, also F res(t) = 0 . Damit folgt aus (3.6.1), dass die Newtonsche Bev
v
schleunigung gleich Null ist, das heißt m a Newton(t) = 0 . Damit ist gemäß unseren Überlegunv
v
gen im Abschnitt 3.5. v (t+∆t)transportiert - v (t) ebenfalls gleich Null. Das bedeutet aber
wiederum (vgl. S. 40 f.), dass die durchlaufene Bahnkurve eine Gerade ist! Also ist die
Bahnkurve eines kräftefreien Massenpunktes (relativ zu einem Inertialsystem) eine Gerade
mit äquidistanten Zeitmarken!
Nun fehlt in meiner Liste der Newtonschen Axiome noch das Dritte, das insbesondere
im Abschnitt 3.8. über den Status der „Fliehkraft" im Rahmen der Newtonschen Mechanik
immer wieder eine wichtige Rolle spielen wird. Dieses dritte Axiom wird für Schülerinnen und
Schüler oft wenig einsichtig „Newtonsches Wechselwirkungsgesetz“ oder gar nur „Actio ist
Reactio“ genannt. Ich beginne daher lieber mit zwei Bespielen und gebe erst danach eine
allgemeine Formulierung dieses Newtonschen Axioms.
Betrachten wir zum Beispiel einen Schüler, der mit konstanter Geschwindigkeit eine
Holzkiste über den Boden zieht. Wählen wir den Schüler als das Objekt aus, auf das die
45
Abb. 21: Schüler zieht Holzkiste über den Boden
Umgebung mit Kräften einwirkt, so wirkt auf diesen die Kiste (als Teil der Umgebung) über
v
das Seil mit einer Kraft F Zug auf Hand. Die übrige Umgebung bewirkt die nach vorne gerichtete
v
v
Bodenreibung F Reibung Boden auf Fuß, die Schwerkraft F Schwerkraft auf Schüler und die Bodenauflagev
kraft F Boden auf Schüler. Würden wir andererseits die Holzkiste als das interessante Objekt herausgreifen, dann wird für diese das Seil in der Hand des Schülers zu einem Teil der
v
Umgebung. Dieses wirkt mit einer Kraft F Zug der Hand auf Kiste auf die Holzkiste ein. Die übrige
v
v
Umgebung trägt die Bodenreibung auf die Kiste, F Reibung Boden auf Kiste, die Schwerkraft F Schwerv
v
F Zug der Kiste
kraft auf Kiste, und die Auflagekraft des Bodens, F Boden auf Kiste bei. Über die Kräfte
v
auf Hand und F Zug der Hand auf Kiste postulierte Newton sein drittes Axiom. Es besagt, dass diese
Kräfte gleich groß und entgegengesetzt gerichtet sind, also
v
v
F Zug der Kiste auf Hand = - F Zug der Hand auf Kiste.
Betrachten wir als zweites Beispiel, das „Tauziehen", bei dem zwei Teams von Schülerinnen
und Schülern an den beiden Enden eines Seils ziehen. Um zu gewinnen, müssen sie versuchen, das gegnerische Team über eine bestimmte Marke zu ziehen. Diese befindet sich am
Beginn des Tauziehens unter der Seilmitte. Wir modellieren das Team A ganz grob als Massenpunkt der Masse MA und das Team B ebenso grob als Massenpunkt der Masse MB Zunächst können wir das Team A als das uns interessierende Objekt ansehen. Dann gehört
Team B zur Umgebung des „Körpers A", die auf den „Körper A" mit der (vom Seil übertragev
nen) Kraft F Zug von Team B auf Team A einwirkt. Andererseits können wir aber auch Team B zum
„Objekt unseres Interesses" machen. In diesem Fall gehört Team A zur Umgebung des
„Körpers B". Diese wirkt auf den „Körper B" mit der (vom Seil übertragenen Kraft)
v
F Zug von Team A auf Team B ein. Nach dem dritten Newtonschen Axiom ist aber zu allen Zeitpunkten
v
v
F Zug von Team B auf Team A = - F Zug von Team A auf Team B.
Es könnte deshalb auf den ersten Blick scheinen, dass kein Team je gewinnen kann! Doch
wenn wir uns die Situation mit den Augen der Newtonschen Mechanik systematisch ansehen, dann sieht die Sache gleich anders aus: Wenn zum Beispiel unser herausgegriffener
Körper Team A ist, dann gehört zu dessen Umgebung - die darauf mit Kräften einwirkt - nicht
nur das Seil, an dem Team B zieht, sondern auch die Schwerkraft und der Boden, gegen
den sich Team A stemmt. In vertikaler Richtung wirkt also die Schwerkraft und die Bodenauflagekraft auf den „Massenpunkt Team A" und in horizontaler Richtung die Zugkraft von Team
B und die Reibungskraft des Bodens. Während sich die beiden Kräfte in vertikaler Richtung
46
zu Null kompensieren, hängt die Beschleunigung des „Massenpunktes Team A" in horizontaler Richtung von der aus der Reibungskraft des Bodens und der Zugkraft des gegnerischen
Teams B zusammengesetzten horizontalen Komponente der Gesamtkraft ab. Ganz Analoges gilt für das Team B als herausgegriffenen Massenpunkt. Da die Zugkraft des jeweils
gegnerischen Teams gleich ist, wird somit jenes Team gewinnen, dem es gelingt, am Boden
festeren Halt zu finden und so eine höhere Reibungskraft auf sich einwirken zu lassen als
das gegnerische Team.
Allgemein formulieren wir das Dritte Newtonsche Axiom so:
h Drittes Newtonsches Axiom:
Angenommen, die Umgebung eines ausgewählten realen Objektes K0 bestehe aus den Körv
v
pern K1, K2, K3, …, Kn, die auf den ausgewählten Körper K0 die Kräfte F 0 ← 1, F 0 ← 2,
v
v
F 0 ← 3, …, F 0 ← n ausüben. Insbesondere übt also der Körper K3 auf den ausgewählten Körv
per K0 die Kraft F 0 ← 3 aus. Machen wir andererseits den Körper K3 zum Zentrum unseres
Interesses, so gehören nun die Körper K0, K1, K2, K4 …, Kn zur Umgebung von K3. Insbesonv
dere übt dann der Körper K0 auf den Körper K3 eine Kraft F 3 ← 0 aus. Nach dem dritten Newv
v
tonschen Axiom sind die Kräfte F 0 ← 3 und F 3 ← 0 gleich groß und entgegengesetzt gerichtet,
v
v
also F 0 ← 3 = - F 3 ← 0. Das gleiche gilt für jedes andere Paar von Körpern.
Damit haben wir unser Ziel erreicht. Das umfassenden Modell „Newtonsche Mechanik“ mit
samt seinen Bausteinen und Axiomen steht uns nun für die Beschreibung der Reaktion von
realen Objekten (wenn als Massenpunkte modellierbar) auf Einwirkungen von außen (wenn
als Kräfte modellierbar) zur Verfügung. Ob die aus den Newtonschen Axiomen hergeleiteten
Voraussagen sich allerdings für reale Vorgänge bewähren, muss erst nachgeprüft werden.
Axiome fallen ja nicht einfach vom Himmel, sondern müssen „erfunden“ werden - für ihre
Einführung sind Kreativität, Phantasie und Intuition erforderlich. Der Weg von der Beobachtung zum erfolgreichen Gesamtmodell gestaltet sich immer als äußerst schwierig. Da Axiome
Festsetzungen ihres Erfinders sind, aus denen alles Weitere hergeleitet werden muss, können sie selbst nicht von irgendwo hergeleitet werden. Ob ein Gesamtmodell (mit seinen Axiomen als wichtigem Teil) brauchbar ist, wird in der Physik (und auch in allen anderen
Bereichen der Lebenswelt der Schülerinnen und Schüler ) daran gemessen, wie erfolgreich
die aus diesem Gesamtmodell abgeleiteten Vorhersagen mit der Realität übereinstimmen.
Da in der Physik ein Gesamtmodell immer in mathematischer Form vorliegt, sind natürlich auch die daraus über die mathematischen Schlussregeln gewonnenen Aussagen von
dieser Form. Sie haben also als Reaktionen zwischen mathematischen Objekten zunächst
nicht unmittelbar mit der Realität zu tun. Daher müssen sie erst als Vorhersagen über be47
stimmte Abläufe in der Lebenswelt gedeutet werden. Erst dann kann durch Beobachtungen
und Experimente überprüft werden, ob diese in die Realität übersetzten Vorhersagen auch in
den entsprechenden realen Abläufen wiederzufinden sind. Beschreibt eine aus einem Axiomensystem gewonnene Vorhersage die Realität nicht richtig, so ist irgendwo etwas falsch
und muss abgeändert werden. Sind jedoch alle hergeleiteten Vorhersagen in der Realität
wiederzufinden, dann hat das Gesamtmodell innerhalb des Rahmens dieser Vorhersagen
seine Bewährungsprobe bestanden. In der Physik versuchen wir ständig, diesen Rahmen zu
erweitern. Wenn sich in sehr vielen Experimenten und Beobachtungen kein einziger Widerspruch zu den gewonnenen Aussagen ergeben hat, dann beginnen wir das Modell zu glauben und nennen es dann eine etablierte physikalische Theorie. Da sich seit seiner
Veröffentlichung in „Philosophiae naturalis principia mathematica“3 im Jahre 1687 Newtons
Modell für die Reaktion von realen Objekten auf Einwirkungen von außen in größtem Umfang bewährt hat, ist seine Mechanik heute zu Recht eine etablierte physikalische Theorie.
Newton wurde für diese großartige Leistung bestaunt, bewundert und gefeiert. Das kommt
sogar in Dichterversen zum Ausdruck, wie zum Beispiel Popes „Nature and Nature´s laws
lay hid in night: God said: Led Newton be! and all was light.“ [Segrè 1997, Teil 1, S. 77] aber
auch seine Grabinschrift: „Sibi gratulentur mortales tale tantumque existisse humani generis
decus.“ 4 [Segrè 1997, Teil 1, S. 78] zeigen.
3.7. Anwendung: Die Newtonsche Gravitationstheorie
Fallende Körper erweckten schon immer das Interesse denkender Menschen. Und so entstanden im Laufe der geschichtlichen Entwicklung zahlreiche Modelle, die den „Fall“ von
Körpern auf die Erdoberfläche beschreiben.
Das erste bekannte Modell für fallende reale Objekte stammt von Aristoteles (384 –
322 v. Chr.). Er stellte aufgrund der Beobachtung seiner Lebenswelt
folgende Behauptung auf: „Schwere Körper fallen schneller als leichte.“ Dieses Konzept wurde lange Zeit unkritisch geglaubt. Einerseits,
weil Aristoteles insgesamt eine philosophische Autorität war, und andererseits, weil diese Behauptung durchaus mit dem Fallen leicht zu
beobachtender Körper im Einklang zu stehen schien.
Abb. 22: Aristoteles
Erst zweitausend Jahre später tauchte eine ganz neue Idee
auf. Galilei (1564 – 1642) behauptete, dass alle Körper ganz unab3
4
übersetzt: „Mathematische Prinzipien der Naturlehre“
„Mögen die Sterblichen sich freuen, dass unter ihnen lebte diese Zierde des Menschengeschlechts.“
48
hängig von ihrer Form, ihrer Zusammensetzung und ihrem sonstigen Aussehen, mit der gleichen Beschleunigung fallen, wenn der Luftwiderstand vernachlässigt werden kann (und –
wie wir seit Newton wissen – das Fallen bei gleicher geographischer Breite erfolgt).
Für Galilei war es vorerst nicht selbstverständlich, dass sich die Gemeinsamkeit „Beschleunigung“ mit Hilfe der Mathematik ausdrücken lässt. Die
Mathematik musste sich erst als Sprache zur Beschreibung von
Abb. 23: Galilei
Phänomenen bewähren. Wir haben uns bereits daran gewöhnt, damals war dies aber etwas
gänzlich Neues.
Vielerorts – zum Beispiel in Schulbüchern - wird behauptet, dass das Modell von Aristoteles falsch sei, und dieser somit von Galilei widerlegt wurde. Doch das Konzept „Schwere
Körper fallen schneller als leichte.“ kann nicht so einfach abgetan werden. Immerhin war Aristoteles zur Prüfung seiner Behauptung ausschließlich auf das Fallen von einigen wenigen
Gegenständen in Luft angewiesen. Vergleicht man unter diesen Bedingungen etwa den Fall
eines Blattes mit dem Fall eines Apfels, so erreicht der Apfel den Erdboden eher als das
Blatt. Der schwerere Körper fällt also schneller als der leichtere, wie Aristoteles behauptete.
Galileis Leistung im Zuge seiner Beschäftigung mit fallenden Körpern bestand darin,
eine viel wesentlichere Gemeinsamkeit (als die von Aristoteles) zu entdecken. Denn ganz
anders als Aristoteles wurde von ihm der Luftwiderstand als eine Einwirkung von außen angesehen, die zu- und weggeschaltet werden
kann. Wird der Luftwiderstand weggeschaltet, so fallen alle Körper mit
der gleichen Beschleunigung. Dies ist eine sehr große Gemeinsamkeit!
Einige Jahrzehnte später beschäftigte sich Newton (1642 –
1727) mit dem Fall von Körpern zur Erdoberfläche. Beim Fallen lässt
sich zunächst als Ursache keine handfeste Einwirkung, wie zum Beispiel der Stoß durch einen anderen Körper, ausmachen. Trotzdem fal-
Abb. 24: Newton
len auch ohne jede Wandberührung in einem evakuierten Glasrohr alle
Körper - relativ zu einem gewählten Intertialsystem, etwa dem Labor – mit der gleichen Beschleunigung, so wie es Galilei aussprach. Damit nun beim Fallen von Körpern auch die
Newtonsche Mechanik gilt, nach der ja alle Beschleunigungen von Körpern proportional einer wirkenden Kraft sein sollten, schlug Newton das Wirken einer immer zum Erdmittelpunkt
v
hin gerichteten Kraft vor. Er nannte sie Gravitation F G (= Schwerkraft, Erdanziehungskraft).
Durch diesen Vorschlag der Existenz einer Schwerkraft machte Newton auch den Fall von
Körpern zu mechanischen Vorgängen; das heißt, Fallvorgänge sind durch Newtons Vorschlag Teil des Inhaltes des linken oberen Kästchens unserer Abb. 1 geworden.
Durch das Postulat der Gravitation hat Newton für die Gültigkeit seiner Axiome bei
der Beschreibung der Fallbewegung gesorgt. Damit wir diese anwenden können, müssen wir
zuallererst ein Inertialsystem festlegen, relativ zu welchem wir die Bewegung eines als Mas49
senpunkt modellierten fallenden Körpers darstellen. Wir wählen das Labor, in dem wir unsere
Fallversuche durchführen als Inertialsystem aus und überziehen es mit einem kartesischen
Koordinatensystem.
Unsere Versuche führen wir in einem luftleeren Glasrohr durch, um alle Kräfte außer
der Gravitation auszuschalten. Auf den fallenden Körper wirken so keine Stützkräfte, keine
Zugkräfte, keine Reibungskräfte (und somit vor allem keine Luftwiderstandskräfte), keine
v
Seitenwindkräfte und keine Muskelkräfte, sondern er ist lediglich der Gravitation F G ausgesetzt. Beim Fallen im evakuierten Rohr gilt also gemäß der Newtonschen Bewegungsgleichung für einen Massenpunkt der Masse m:
v
v
m a(t) = F G
(3.7.1)
v
Nun wusste Newton von Galilei, dass alle Körper mit der gleichen Beschleunigung g fallen,
v
v
und dass g in Erdnähe den Betrag g: = g = 9,81 ms-2 besitzt. Also können wir schreiben:
v
v
mg = FG
(3.7.2)
Vereinigen wir die Bewegungsgleichungen (3.7.1) und (3.7.2), so erhalten wir
v
v
m a (t) = m g ,
also
v
v
a (t) = g ,
eine wohlbekannte Gleichung, die auch in vielen Schulbüchern zu finden ist [vgl. SEXL 1992,
S. 29], und die Galileis Befund aus der Newtonschen Mechanik vorhersagt! Die Gleichung
(3.7.2) lautet in Worten, dass die Gravitation für jeden fallenden Körper direkt proportional zu
seiner Masse m ist. Die Kraft mit der ein Körper von der Erde angezogen wird, ist um so
größer, je größer dessen Masse ist.
Wir benützen nun die Bewegungsgleichung (3.7.2), um die Gravitation, die die Erde
auf eine Schokoladentafel der Masse von 100 g ausübt, zu bestimmen. Durch einsetzen der
v
entsprechenden Größen für m und g , erhalten wir für den Betrag der Kraft 0,981 N. Zwei
zusammengeklebte Schokoladentafeln würden von der Erde mit einer doppelt so großen
Kraft – also 1,962 N – angezogen werden.
Gemäß dem Newtonschen Wechselwirkungsgesetz übt auch die Schokoladetafel eine Kraft auf die Erde aus. Diese ist gleich groß und entgegengesetzt gerichtet. Die Schoko-
50
ladentafel zieht also die Erde mit einer Kraft von 0,981 N an. Da auf die Erde eine Kraft ausgeübt wird, muss sie eine Beschleunigung erfahren. Diese können wir mit Hilfe der Newtonschen Bewegungsgleichung bestimmen, indem wir die Werte 0,981 N für die resultierende
v
Kraft F G und 5,98⋅1024 kg für die Masse m des Massenpunktes einsetzen. Für die Erde ergibt sich eine Beschleunigung von ungefähr 1,6⋅10-25 ms-2 - die zu der als Massenpunkt modellierten Schokoladentafel hin gerichtet ist. Der Betrag dieser Beschleunigung ist so winzig,
dass wir sie nicht wahrnehmen können.
Beim Fallen von Körpern durch Luft bewirkt diese einen Luftwiderstand, den wir durch
v
eine Kraft F Luft modellieren. Dann lautet die Bewegungsgleichung
v
v
v
m a(t) = F G + F Luft.
Hängen wir andererseits einen Körper an eine Spiralfeder, dann besteht die Umgebung dieses Körpers aus der Erde (mit ihrer Schwerkraft) und der Feder. Wie bisher modellieren wir
v
die Einwirkung der Erde über die Gravitation als eine Kraft F G von der wir nunmehr wissen,
v
v
v
dass sie als m g = mg e z geschrieben werden kann - mit e z als dem Einheitsvektor in senkv
rechter Richtung. Die Einwirkung der Feder modellieren wir ebenfalls durch eine Kraft F Feder,
v
v
der wir nach dem Vorschlag von Hooke die detaillierte Form F Feder = - k(z(t) – l0) e z geben mit k als der „Federkonstanten“, l0 als der Länge der Feder im entspannten Zustand, und z
als Länge der Feder im gespannten Zustand. Die Newtonsche Bewegungsgleichung lautet
dann
v
v
v
m a(t) = mg e z - k[z(t) – l0] e z.
Ist der aufgehängte Körper bei der Auslenkung z(t) = z0 in Ruhe, dann ist die Beschleuniv
gung a(t) Null, und wir erhalten
mg = k(z0 – l0)
oder
m=
k(zo − l0)
g
.
Aus diesem letzten Zusammenhang können wir also die Masse bestimmen, wenn wir die
entspannte Länge l0 und die gedehnte Länge z0 der Feder messen, wenn wir die Federkonstante k und die Galileiesche Beschleunigung g kennen, und wenn wir wissen, dass die
51
Newtonsche Mechanik richtig ist ! Den Modellbaustein Masse, von dem wir a priori gar nicht
wissen, ob er sinnvoll ist, können wir nur bestimmen, wenn wir (unter Anderem!) annehmen,
dass er sinnvoll ist! Diese „Zirkularität“ der Mechanik im Speziellen und der Physik im Allgemeinen, die von vielen Leuten als „unannehmbar“ bejammert wird, lässt sich grundsätzlich
nicht vermeiden. Sie muss daher unseren Schülerinnen und Schülern unbedingt nahegebracht werden. In der Physik gibt es nur Konsistenz in dem Sinn, dass alles wunderbar zusammenpasst und alle bekannten Beobachtungen und Experimente bestens vorhergesagt
werden. Auch mit der „bloßen“ Konsistenz lässt sich gut leben. Dies ersieht man aus der
Tatsache, dass die Physik ganz unwahrscheinlich erfolgreich ist: Tagtäglich erleben dies
unsere Schülerinnen und Schüler an den zahlreichen bestens funktionierenden technischen
Geräten, die alle auf physikalischen Vorhersagen basieren.
Newton beschäftigte sich eingehend mit seinem Konzept der Gravitation. Er erkannte,
dass nicht nur die Erde andere Körper anzieht, sondern dass alle Körper andere Körper anziehen. Die von Newton vorgeschlagene Gravitation ist also zwischen allen Körpern vorhanden. Auf der Erde bemerken wir aber nur die Gravitation zwischen kleinen Körpern (wie
einem Apfel, einem Stein oder uns selbst) und einem sehr großen Körper (wie der Erde). Die
Gravitation zwischen zwei Körpern (wie uns selbst und einem Tisch) ist viel zu kein, um sie
wahrzunehmen.
Obwohl die Idee der allgemeinen Gravitation so erfolgreich war, bemerkte Newton,
dass sein Vorschlag dem gesunden Menschenverstand widerspreche: Die Gravitation soll ja
durch den leeren Raum wirken. Dies ist eine Behauptung, die der Intuition viel schlechter
entspricht als die Ansicht „Einwirkungen auf Körper haben ihre Ursache im direkten Kontakt
mit anderen Körpern“. Daher wurde dem Konzept der Gravitation eine gehörige Portion
Skepsis entgegen gebracht – eben auch von Newton selbst.
Der Legende nach kam Newton durch die Beobachtung eines fallenden Apfels auf die
Idee der Gravitation. Newton hielt sich zu dieser Zeit tatsächlich auf dem Land (im elterlichen
Haus in Woolsthorpe/Lincolnshire) auf, weil in London die Beulenpest wütete (1665 – 1666).
Dort sah er höchst wahrscheinlich viele Äpfel fallen. Aber ganz unabhängig davon, ob diese
Anekdote von Newton und dem Apfel wahr ist oder nicht, sie ist einfach zu gut, als dass sie
im Unterricht fehlen dürfte. In der Erinnerung eines Zeitgenossen Newtons klingt die Begebenheit so: „Nach dem Mittagessen, da es ein schöner Tag war, gingen wir in den Garten
und tranken Tee zu zweit im Schatten einiger Apfelbäume. Im Verlaufe der Unterhaltung
bemerkte er zu mir, dass er sich genau in derselben Situation befand, als die Idee der Gravitation in ihm auftauchte. Sie wurde durch den Fall eines Apfels ausgelöst, als er, in Gedanken vertieft, hier saß. Warum muss dieser Apfel immer lotrecht zu Boden fallen – meditierte
er – warum kann er sich nicht zur Seite oder nach oben bewegen, immer nur in Richtung des
Mittelpunkts der Erde? Die Ursache dafür ist offensichtlich, dass die Erde ihn anzieht. Es
52
muss also ...“ [HILDEGARDIS-SCHULE HAGEN]
3.8. „Fliehkraft“ in der Newtonschen Mechanik?
Beim Durchblättern der in Österreich approbierten Schulbücher – in denen die Newtonsche
Mechanik behandelt wird – trifft man immer wieder auf den Begriff der „Fliehkraft“. Doch eine
Fliehkraft, die einen Körper aus seiner Bahn zu ziehen versucht, sobald dieser (in einem Inertialsystem!) eine Kurve beschreibt, existiert im Modell „Newtonsche Mechanik“ nicht. Dort
gibt es ja – mit Ausnahme der Fernwirkungskraft „Gravitation“, die aber immerhin auch vom
Körper „Erde" verursacht wird – nur „handfeste“ Kräfte! Wovon reden also die Schulbücher,
und vor allem, wie reden sie?
Beispielsweise lesen wir: „… Die Menschen in der Höllenzentrifuge als mitbewegte
Beobachter stellen eine nach außen wirkende Kraft fest, die Zentrifugalkraft (Fliehkraft).“
[KRAKER 1990, S. 59]; „… Der rotierende Beobachter … verspürt eine Trägheitskraft, die
nach außen gerichtet ist. Die „Zentrifugalkraft“ … drängt den Körper nach außen.“
[BASISWISSEN 1990, S. 74]; „Beobachter, die an einer Kreisbewegung teilnehmen, nehmen
eine (durch die Trägheit verursachte) Kraft wahr, die radial nach außen gerichtet ist. Diese
Kraft wird Zentrifugal- oder Fliehkraft genannt. … Die Wirkung der Zentrifugalkraft kann z. B.
jeder Radfahrer in einer Kurve feststellen. Er muß das Rad in eine Schräglage neigen, um im
Gleichgewicht zu bleiben.“ [SEXL 1992, S. 46]
Hier frage ich mich zunächst, auf welche Weise diese – an einer Kreisbewegung teilnehmenden – Beobachter diese Kraft wahrnehmen. „Handfest“ - also auf die Einwirkung
eines anwesenden Körpers zurückführbar - ist diese „Fliehkraft“ ja nicht, da sie laut Schulbuch durch die „Trägheit“ des herausgegriffenen Körpers verursacht wird. Also liegt die Ursache der „Fliehkraft“ nicht - wie bei den „handfesten“ Kräften - in der Einwirkung der
Umgebung auf einen herausgegriffenen Körper, sondern sie hat ihre Ursache in dem herausgegriffenen Körper selbst, nämlich in seiner "Trägheit". Diese Eigenschaft der „Fliehkraft“
wollen wir uns für die folgende Argumentation gegenwärtig halten. Außerdem scheint sie wenn ich die Schulbücher richtig verstehe - die seltsame Eigenschaft zu haben, nur bei einem Wechsel des Bezugsystems (zum Beispiel von einem Inertialsystem zu einem rotierenden System) „geisterhaft“ aufzutreten - für wahr eine seltsame „Kraft“.
Nachdem wir die Behauptung der Schulbücher zur Kenntnis genommen haben, dass
die „Fliehkraft“ durch die „Trägheit" des betrachteten Körpers hervorgerufen wird, müssen wir
fragen, was „Trägheit“ eigentlich sein soll. Eigenartiger Weise taucht dieses Wort im Schulbuch - und ebenso in anderen populären Darstellungen - immer wieder auf, obwohl in der
53
gesamten Newtonschen Mechanik dieses Konzept nirgends vorkommt. Im Newtonschen
Modell der Mechanik existiert kein Modellbaustein dieses Namens: Es gibt die Modellbausteine „Masse", „Bahnkurve", „Beschleunigung" und „(handfeste) Kräfte", aber keinen Modellbaustein „Trägheit". Was also sollen meine Schülerinnen und Schüler mit diesem
mysteriösen Konzept anfangen? Aus dem Zusammenhang der Verwendung des Wortes
„Trägheit“ in den Schulbüchern scheint mir jedenfalls hervorzugehen, dass die „Trägheit“
eines herausgegriffenen Körpers eine Kurzform der Schulbuchversion des Ersten Newtonschen Axioms ist („Ohne Einwirkung einer Kraft bewegt sich ein Körper mit konstanter Geschwindigkeit längs einer Geraden").
Mit dieser Vermutung im Einklang steht mein nächstes Zitat, wo statt von „Trägheit“
von einem „Trägheitswiderstand“ die Rede ist: „Der durch die Zentripetalkraft hervorgerufene
v
v
Trägheitswiderstand (Reaktionskraft zu F z ) wird als Zentrifugalkraft ( F f ) oder Fliehkraft
bezeichnet.“ [LEPOLD 1985, S. 48] Ich vermute, dass „Trägheitswiderstand“ hier das selbe
bedeutet wie die „Trägheit“ bei [SEXL 1992, S. 46]. Darüber hinaus erfahren wir, was diese
„Trägheit“ beziehungsweise dieser „Trägheitswiderstand“ sein soll: Es ist die „Reaktionskraft“
zur Zentripetalkraft, was wohl nur im Sinne des „Dritten Newtonschen Axioms“ gemeint sein
kann. Wenn dies so ist, dann haben wir hier jedoch einen ganz fundamentalen Fehler vor
uns, denn in Kapitel 3.6. haben wir gelernt, dass die „Reaktionskraft“ auf eine „Kraft“, die der
Körper K1 auf den Körper K2 ausübt, vom Körper K2 auf den Körper K1 ausgeübt wird. „Kraft“
(„Actio“) und „Reaktionskraft“ („Reactio“) greifen ja nicht am selben Körper an.
Im Geiste der „Newtonschen Mechanik“ kann also die „Trägheit“ von [SEXL 1992,
S. 46] und der „Trägheitswiderstand“ von [LEPOLD 1985, S. 48] keine „Reactio“ auf die
„Zentripetalkraft“ sein. Vielmehr vermute ich, dass diese Autoren irgendwo in „ihrem Hinterkopf“ das „Zweite Newtonsche Axiom“ für die Bewegung auf einer Kreisbahn,
v
v
- mω2R e z = F z,
zu
v v
v
0 = F z + mω2R e z,
(3.8.1)
v
umgeschrieben haben. Den Term „Masse × Beschleunigung“ (mω2R e z), den man sehr wohl
als zum betrachteten Körper gehörig ansehen kann, bezeichnen sie nun als „Reaktionskraft“.
Dieser hat aber mit den „Reaktionskräften“ des dritten Newtonschen Axioms - der einzige
Ort, wo in der „Newtonschen Mechanik“ „Reaktionskräfte“ vorkommen - nichts zu tun.
Daneben haben sich die Autoren mit dieser Vorgangsweise ein weiteres Dilemma eingehandelt, das genau so schlimm ist. Denn sie haben („durch die Hintertüre“) anscheinend eine
v
„Bewegung“ herbei interpretiert, bei der die Gesamtkraft F gesamt - zusammengesetzt aus der
54
v
v
handfesten „Zentripetalkraft" F z und der „Pseudokraft" mω2R e z – Null ist. Für eine verschwindende Gesamtkraft muss für diese Autoren aber auch die zugehörige Beschleunigung
Null sein. Dies scheint auch in der Formel (3.8.1) der Fall zu sein. Denn da, wo immer die
Beschleunigung steht - nämlich links vom Gleichheitszeichen -, sehen wir eine Null! Nur gilt
nun für diese Autoren ihre Version des „Ersten Newtonschen Axioms“ nicht mehr, nämlich,
dass ein Körper sich mit konstantem Geschwindigkeitsbetrag längs einer geraden Bahn bewegt, wenn auf ihn die Gesamtkraft Null ist. Dieser Körper - für den die Schulbuchautoren
eine verschwindende Gesamtkraft konstruiert haben - bewegt sich ja nicht längs einer Geraden, denn der Ausgangspunkt der ganzen Diskussion war doch gerade die Kreisbewegung
eines Körpers! Ein ziemlich schlimmes Dilemma!
Einen weiteren (für die mit dem Modell „Newtonsche Mechanik" vertrauten Leser überraschenden) Gesichtspunkt bringt [KRAKER 1990, S. 59] ins Spiel: „… Die Menschen in
der Höllenzentrifuge“ (eine Vergnügungspark-Belustigung) als mitbewegte Beobachter stellen eine nach außen wirkende Kraft fest, die Zentrifugalkraft (Fliehkraft)“. Und als gelb unter-
legter (also offenbar wichtiger) Merksatz: "Die Zentripetalkraft wird von einem ruhenden
Beobachter, die Zentrifugalkraft von einem mitbewegten Beobachter festgestellt". Ins gleiche
Horn stößt [SCHREINER 1982], der feststellt, dass es in einem Inertialsystem keine Fliehkraft gibt [vgl. S. 158], dass jedoch ein auf der Scheibe mitrotierender Beobachter eine weitere Kraft findet: „… Da aber die Kugel in Ruhe ist, muß auf sie eine zur Zentripetalkraft
v
v
v
v
gegengleiche Kraft F i wirken. Das ist die Fliehkraft F i = - F z = m ω 2 r [S. 159].“
Ich versuche nun, durch eine Rückbesinnung auf das tatsächliche Modell der „Newtonschen Mechanik" Ordnung in diesen Wust von „Trägheitskräften" zu bringen. Dazu erinnere ich zunächst daran, dass in der Newtonschen Mechanik das Konzept „Ruhe“ keinen
Sinn macht, und dass für die Formulierung der Newtonschen Bewegungsgleichung nur jene
„Beschleunigung“ brauchbar ist, die aus einer relativ zu einem Inertialsystem aufgezeichneten Bahnkurve nach dem Euklidischen Verfahren gewonnen wurde. In den angegebenen
Zitaten wird jedoch mit „Kräften" argumentiert, die je nach dem verwendeten Bezugssystem
wirken oder nicht wirken. Es scheint so, als ob der Mensch beim Wechsel des Bezugssystems diese „Kräfte" wie von Geisterhand an- und abschalten würde!
Dass die Newtonsche Mechanik zunächst nur in einem Inertialsystem formuliert werden kann, bedeutet aber nicht, dass wir in der Beschreibung von Bewegungen auf diese Bezugssysteme beschränkt wären. Das wäre eine unangenehme Einengung, denn sehr oft ist
die Benutzung eines Nicht-Inertialsystems viel bequemer als die eines Inertialsystems. Denken wir nur an die rotierende Erde. Diese stellt kein Inertialsystem dar, ist aber zur Beschreibung der Bewegungen von Körpern auf oder nahe bei der Erde viel bequemer und
aussagekräftiger als ein abstraktes Inertialsystem, das „relativ zum Fixsternhimmel ruht" (wie
55
es in Schulbüchern manchmal zu lesen ist). Das selbe gilt für den Autofahrer, der „seine
beim Autofahren erlebte Mechanik" natürlich nicht auf die Straße draußen sondern auf das
Bezugssystem „mein Auto" bezieht oder für das auf einem Karussell fahrende Kind, das seine Beobachtungen natürlich auf als Bezugssystem des (rotierenden) Karussellbodens bezieht und nicht auf ein System von Buden außerhalb des Karussells.
Trotzdem haben wir keine andere Wahl, als zunächst für die Vorhersage von Bewegungen (etwa eines „Foucaultschen Pendels" oder einer zum Äquator strömenden Luftmasse) zunächst von einem Inertialsystem auszugehen. Anschließend können wir jedoch die
dafür aufgestellte Newtonsche Bewegungsgleichung auf das bequemere Nicht-Inertialsystem
umrechnen (das wir außerdem beliebig koordinatisieren können). Die mit Hilfe dieser umgerechneten Bewegungsgleichung vorhergesagte Bahn ist dann auch relativ zum NichtInertialsystem zu interpretieren.
Auf dem Papier sieht die für verschiedene Bezugs- und Koordinatensysteme dargestellte Newtonsche Bewegungsgleichung auf den ersten Blick schon sehr verschieden aus.
Fassen wir aber diese verschieden aussehenden Bewegungsgleichungen wieder zu einer
Vektorgleichung zusammenfassen, dann erhalten wir aus jeder dieser verschiedenen Dar-
stellungen die Aussage des Zweiten Newtonschen Axioms, nämlich die für jeden Zeitpunkt
gültige Gleichheit zwischen dem mit der bezugs- und koordinatensystemunabhängigen Masse m multiplizierten bezugs- und koordinatensystemunabhängigen Beschleunigungsvektor
v
v
a(t) einerseits, und der bezugs- und koordinatensystemunabhängigen Gesamtkraft F gesamt,
handfest
andererseits. Wir erhalten also die für den betrachteten Massenpunkt gültige Newton-
sche Bewegungsgleichung,
v
v
m a(t) = F gesamt, handfest
(3.8.2)
Dabei betone ich noch einmal, dass auch bei der Darstellung in einem beliebigen Bezugssystem unter Verwendung eines beliebigen Koordinatensystems immer nur lauter „handfeste" Kräfte vorkommen (allerdings in einer vom benutzten Bezugs- und Koordinatensystem
abhängigen Darstellung), aber nie irgendwelche „Geisterkräfte" wie die „Fliehkraft"!
Vergleichen wir nun diese im Einklang mit der Newtonschen Mechanik gegebene
Darlegung mit der Schulbuchargumentation für den Fall, dass das mitbewegte Bezugssystem benutzt wird. Dann reduziert sich die Bahn des Beobachters auf einen Punkt. Und nun
begehen die zitierten Schulbuchautoren den Fehler, an diese (sehr einfache) Bahn die Beschleunigung nach Newton zu konstruieren. Das Ergebnis ist natürlich, dass diese (völlig
falsch konstruierte) „Beschleunigung" dauernd Null ist. Da aber diese Autoren auch um die
Existenz des Zweiten Newtonschen Axioms wissen, nämlich dass die mit der Masse multipli-
56
zierte Beschleunigung immer gleich der Vektorsumme der wirkenden Kräfte sein muss
(vgl. (3.8.2)), schließen sie - da ihre „Beschleunigung" ja dauernd Null ist -, dass die Vektorsumme der wirkenden Kräfte auch immer Null sein muss. Wenn diese Autoren jedoch die
physikalische Situation ansehen, dann sehen sie zwar - je nach dem betrachteten System v
eine oder mehrere „handfeste" Kräfte, deren Vektorsumme aber nicht Null ist, F gesamt, handfest ≠
v
0 ! Um dennoch die Gültigkeit des Zweiten Newtonschen Axioms zu retten, müssen diese
v
Autoren also eine weitere Kraft erfinden, die „Trägheitskraft" F Trägheit. Diese muss gerade
v
negativ gleich groß wie F gesamt, handfest sein, damit die Summe aus allen handfesten Kräften
und der erfundenen Trägheitskraft Null ergibt,
v v
v
0 = F gesamt, handfest + F Trägheit.
(3.8.3)
Nun wissen wir aber aus unserer zuvor im Rahmen der Newtonschen Mechanik geführten
v
Argumentation, dass F gesamt, handfest bezugs- und koordinatensystemunabhängig immer gleich
v
ist. Also kann in (3.8.3) F gesamt, handfest nur das Gleiche sein wie in (3.8.2), und demnach gleich
v
m a(t) . Mit dieser Erkenntnis wird (3.8.3) zu
v
v
v
0 = m a(t) + F Trägheit
oder
v
v
F Trägheit = - m a(t)
und somit zu
v v
v
0 = F gesamt, handfest - m a(t) .
(3.8.4)
Also sehen wir, dass die Trägheitskraft nichts anderes ist als die negativ genommene linke
Seite der korrekten Newtonschen Bewegungsgleichung (vgl. 3.8.2)! Das meinen offenbar die
zitierten Schulbuchautoren mit dem „Lehrsatz": „Im mitbewegten System treten zusätzlich
‚Trägheitskräfte‘ auf“. Sie verschweigen nur, dass diese „im mitbewegten System auftretenden Trägheitskräfte" für verschiedene nicht-inertiale Bezugssysteme immer ganz verschieden aussehen. Wie wir nun wissen, sind die Trägheitskräfte ja nichts anderes als die negativ
genommene Darstellung der mit m multiplizierten Newtonschen Beschleunigung in diesem
Bezugssystem! Da diese Darstellung der Beschleunigung für verschiedene Bezugsysteme
eben verschieden ist, ist damit die „Trägheitskraft“ in diesen verschiedenen Bezugssystemen
auch immer verschieden.
57
In (3.8.3) kommt zum Ausdruck, dass die Vektorsumme aus den handfesten Kräften
und der Trägheitskraft „Null“ ergibt. Diese Tatsache ist jedoch für das Auffinden der Bahn,
die der unter diesen Einflüssen stehende Massenpunkt durchläuft, so lange völlig wertlos, so
lange nicht die funktionale Abhängigkeit der „Trägheitskraft“ – also der Newtonschen Beschleunigung (vgl. (3.8.4)) – von den gewählten Koordinaten und deren ersten und zweiten
Ableitungen bekannt ist. Diese Abhängigkeit liefert ausschließlich das Newtonsche Verfahren, bei dem die Bahn relativ zu einem inertialen Bezugssystem zu Grunde gelegt werden
muss.
Ist jedoch diese funktionale Abhängigkeit der „Trägheitskraft“ von den gewählten Koordinaten und deren ersten und zweiten Ableitungen erst einmal bekannt (durch eine Betrachtung im Rahmen der Newtonschen Mechanik), dann enthält die Beziehung (3.8.4)
natürlich genau die gleiche Information wie die Newtonsche Bewegungsgleichung. Es ist
aber ein grobes Missverständnis der Newtonschen Mechanik zu behaupten, im mitbewegten
Bezugssystem sei die Beschleunigung gleich Null, dafür wirke aber eine weitere Kraft, die
Trägheitskraft!
Nur in dem speziellen – zugegebenermaßen aber häufigen – Fall, dass der betrachtete Massenpunkt eine Kreisbahn mit Radius R um einen festen Ursprung beschreibt, hat die
„Trägheitskraft“ im mitbewegten Bezugssystem das vertraute Aussehen,
v
v
F Trägheit = mω2R e r .
Sie wird dann bekanntlich in den Schulbüchern als „Zentrifugalkraft“ (von lateinisch „centrum“
„Mittelpunkt“, und „fugere“ „fliehen“, also „Kraft, die den Mittelpunkt flieht“) genannt. Dagegen
wird die „handfeste“ Kraft, die den Massenpunkt zwingt, eine Kreisbahn zu beschreiben, in
den Schulbüchern einfach „Zentripetalkraft“ (von lateinisch „centrum“ „Mittelpunkt“, und „petere“ „nach etwas streben“, also „Kraft, die zum Mittelpunkt strebt“) genannt. Die Beziehung
(3.8.3) wird so zu der inhaltsleeren Aussage „Die Summe aus Zentripetalkraft und Fliehkraft
ist Null“. Ganz abgesehen davon, ist diese Bezeichnung schon deshalb nicht sehr glücklich,
weil sie nicht zum Ausdruck bringt, dass es ganz verschiedene Einwirkungen auf Körper gibt,
die diesen auf eine Kreisbahn zwingen. So eine Einwirkung ist etwa die von einem Stück Seil
übertragenen Kraft, mit der ein Schüler einen Stein herum schwingt, oder die Kraft, mit der
die Wand der „Höllenzentrifuge“ die Vergnügungsparkbesucher auf einem Kreis rotieren
lässt.
In anderen nicht-inertalen Bezugssystemen muss der Trägheitskraft eine andere
Gestalt gegeben werden. Um dies an einem einfachen Beispiel zu demonstrieren, denken
wir uns eine an Mechanik sehr interessierte Schülerin. Diese möchte in einem Vergnügungs-
58
park auf der kreisrunden Bodenplatte eines speziellen, mit der Winkelgeschwindigkeit Ω, im
Uhrzeigersinn rotierenden Karussells einen mechanischen Versuch zu den „Trägheitskräften“ durchführen. Das Besondere an diesem Karussell ist, dass entlang seiner Peripherie im
Abstand R vom Mittelpunkt ein Gleis verlegt ist. Auf diesem kann der Passagier in einem
Wägelchen mit Elektroantrieb Runden drehen.
Unsere Schülerin wählt den rotierenden Karussellboden als Bezugssystem und außerdem drei verschiedene Versuchsbedingungen: Im Fall (a) sitzt sie bloß in dem relativ zum
Karussellboden ruhenden Wägelchen, im Fall (b) dreht sie relativ zum Karussellboden mit
der Winkelgeschwindigkeit ω (ebenfalls im Uhrzeigersinn) einige Runden, und im Fall (c)
dreht sie relativ zum Karussellboden im Gegenuhrzeigersinn mit der Winkelgeschwindigkeit
Ω einige Runden. Den Betrag der Kräfte (im Schulbuch „Zentripetalkräfte" genannt), mit de-
nen die „Cockpit-Wände" des Wägelchens jeweils auf den Körper der Schülerin einwirken,
misst sie mit einer Badezimmerwaage, die sie zwischen sich und die Außenwand des Cockpits geklemmt hat. Ihr Ziel besteht darin, die Anzeigen der Badezimmerwaage mit den Ausführungen in ihrem Schulbuch zu vergleichen.
Im Fall (a) errechnet sie aus der Anzeige der Badezimmerwaage eine Kraft F0. Da sie
relativ zu dem von ihr gewählten Bezugssystem Karussellboden ruht, nimmt sie eine Schulbuchbeschleunigung von Null an. Bis jetzt wäre aber das Zweite Newtonsche Axiom nicht
erfüllt. Sie folgt deshalb den Ausführungen des Schulbuches. Dort heißt es, dass im mitbewegten System zur „Zentripetalkraft" F0 noch die „Fliehkraft" -mRΩ2 auftritt. Damit findet sie
0 = F0. - mRΩ2,
was für die Schülerin numerisch richtig ist: Wenn sie die Werte ihrer Masse m, des Gleisradius R und der Winkelgeschwindigkeit Ω des Karussells in mRΩ2 einsetzt, dann stimmt dieser Wert mit dem von der Badezimmerwaage abgelesenen F0 gut überein. Die Informationen
des Schulbuches scheinen also zu stimmen. Doch die Tatsache, dass die Badezimmerwaage von der „Fliehkraft“ offenbar nichts merkt, bereitet der Schülerin größtes Unbehagen.
Denn diese zeigt ja die „Zentripetalkraft" F0 an, und nicht etwa die Differenz zwischen der auf
die Schülerin nach innen wirkenden „Zentripetalkraft" und der auf sie nach außen wirkenden
„Fliehkraft"! Wie ist so etwas möglich, fragt sich unsere Schülerin.
Wie jede gute Physikerin hofft sie, durch Variieren ihres Versuches Licht in diesen
seltsamen Sachverhalt zu bringen. Deshalb wechselt sie nun zur Version (b) ihres Experimentes. Die Geschwindigkeit des Elektrowägelchens relativ zu dem von ihr gewählten Bezugssystem Karussellboden ist nun nicht mehr Null, sondern vrel = Rω. In diesem Fall lehrt ihr
59
Schulbuch, dass die zugehörige „Zentripetalbeschleunigung“ arel =
v rel 2
= Rω2 ist. Erneut
R
errechnet die Schülerin aus der Anzeige der Badezimmerwaage die Zentripetalkraft F+ω. Diese ist nun größer als F0 im Fall (a). Die Schülerin befindet sich in einem rotierenden Bezugssystem und aus diesem Grund tritt laut Schulbuch neben der Zentripetalkraft F+ω noch eine
„Fliehkraft“ auf. Da ihr Bezugssystem mit der Winkelgeschwindigkeit Ω rotiert, erscheint es
ihr plausibel, diese „Fliehkraft“ - so wie unter den Versuchsbedingungen (a) - wieder als mRΩ2 anzusetzen. Als sie jedoch die numerischen Werte der einzelnen Größen in die Gleichung „Masse mal Beschleunigung“ ist gleich „Zentripetalkraft" plus „Fliehkraft“ einsetzt, also
in die Gleichung
mRω2 = F+ω - mRΩ2,
(3.8.5)
findet sie zu ihrer Enttäuschung eine grobe Diskrepanz. Wir wissen natürlich, warum: Relativ
zum Inertialsystem des Platzes, auf dem der Vergnügungspark steht, ist die Geschwindigkeit
des Elektrowägelchens v = ω + Ω. Daher ist seine nach der Newtonschen Methode berechnete Beschleunigung aNewton = R(ω + Ω)2. Die Newtonsche Bewegungsgleichung lautet somit
mR(ω + Ω)2 = F+ω,
oder so umgeformt, dass die linke Seite dieser Gleichung mit der linken Seite von (3.8.5)
übereinstimmt
mRω2 = F+ω - mRΩ2 - 2mRωΩ.
Um also mit der „Fliehkraft-Philosophie“ der Schulbücher eine stimmige Bewegungsgleichung zu erhalten, müsste unsere Schülerin für den vorliegenden Fall (b), wo das gewählte
Bezugssystem nicht mehr das mitrotierende ist, für die „Fliehkraft“ die Summe der beiden
Terme - mRΩ2 und - 2mRωΩ nehmen. In wieder anderen nicht-inertialen Bezugssystemen
sähen in dieser Philosophie die „Trägheitskräfte“ wieder anders aus - ganz wie oben allgemein behauptet.
Betrachten wir unter diesem Gesichtspunkt noch die Versuchsversion (c). Die Geschwindigkeit des Elektrowägelchens relativ zu dem von der Schülerin gewählten Bezugssystem ist
diesmal vrel = -RΩ. Somit ist die zugehörige Schulbuchbeschleunigung erneut arel =
v rel 2
=
R
= RΩ2. Die Badezimmerwaage zeigt jedoch nun zur Überraschung der Schülerin keinen
60
Ausschlag! Also ist F-Ω gleich Null. Laut Schulbuch tritt aber auf jeden Fall eine „Fliehkraft“
auf, da sich die Schülerin in einem mit der Winkelgeschwindigkeit Ω rotierenden Bezugssystem befindet. Mangels besserer Kenntnis setzt sie diese versuchsweise wieder als -mRΩ2
an. Nun erhält die Schülerin aber die unmögliche Schulbuch-Bewegungsgleichung
mRΩ2 = - mRΩ2.
(3.8.6)
Die verschiedenen Vorzeichen kommen natürlich daher, dass die „Zentripetalbeschleunigung" nach innen, die „Zentrifugalkraft" aber nach außen gerichtet ist. Um Gleichheit zwischen der „Zentripetalbeschleunigung" und der „Fliehkraft" zu erhalten, hätte unsere
Schülerin hier die Fliehkraft mit dem Wert + mRΩ2, also nach innen gerichtet, wählen müssen! Wir wissen natürlich wieder, woher diese befremdliche „Mechanik" kommt: Unter den
Versuchbedingungen (c) ruht unsere Schülerin relativ zum Inertialsystem „Erdboden". Deshalb ist die Newtonsche Beschleunigung Null, und wie es nach dem Zweiten Newtonschen
Axiom sein muss, wirkt auch keine handfeste Kraft F-Ω der Cockpitwand auf die Schülerin
ein. Ganz so wie es die Badezimmerwaage anzeigt.
Mit diesen Überlegungen hoffe ich, meine Leser überzeugt zu haben, dass wir uns
von den „Trägheitskräften" ein für alle Mal verabschieden sollten, wenn uns damit ernst ist,
unseren Schülerinnen und Schülern das Gesamtmodell Newtonsche Mechanik näher zu
bringen. Die Frage, ob diese Absicht bereits im fünften oder sechsten Jahr der gymnasialen
Oberstufe von der intellektuellen Entwicklung der Jugendlichen her überhaupt möglich ist,
oder aber erst in der achten Schulstufe, lasse ich hier unbeantwortet. Für den Fall, dass wir
aber die Struktur der Newtonschen Mechanik darlegen wollen, dürfen wir nicht dieser Mechanik fremde Konzepte wie „Trägheitskräfte" ins Spiel bringen. Im Gegensatz dazu müssen
wir an jede mechanische Situation mit immer dem gleichen theoretischen Rüstzeug herangehen. Und dieses theoretische Rüstzeug ist eben die Newtonsche Mechanik, die kein Konzept „Trägheitskräfte" kennt.
Es gibt nun aber viele Situationen, wo der „mechanische Laie" gegen die Eliminierung
der „Fliehkraft" heftig protestieren würde, „... weil man die doch bei Drehbewegungen, vor
allem wenn sie schwungvoll sind, ganz real spürt!". Solche „schwungvollen" Drehbewegungen sind etwa das Durchfahren einer „scharfen" Kurve auf Schiern oder auf dem Snowboard.
So hören die Schülerinnen und Schüler beispielsweise bei der TV-Übertragung des Winter
für Winter in Bormio, Italien, ausgetragenen Weltcup-Abfahrtslaufes die Kommentatoren von
den „gewaltigen Fliehkräften“ sprechen, die in einer bestimmten Kurve dieser Abfahrtsstrecke auf den Rennläufer einwirken. Wenn es aber nun in der Newtonschen Mechanik keine
61
Fliehkräfte gibt, was spürt der Rennläufer dann? Und dass er etwas spürt, weiß jeder, der
selbst schon auf Schiern flott unterwegs war.
Zunächst halte ich fest, dass wir Menschen kein Sinnesorgan zur Messung des von
Newton erfundenen theoretischen Konzeptes einer „Kraft" haben (und schon gar nicht zur
Messung des „fiktiven" Konzeptes „Fliehkraft"!). Wenn wir etwas spüren, dann hat dies immer mit Nervensignalen zu tun, die aus unseren Körperregionen im Gehirn eintreffen. Im
Falle unseres Rennläufers kommen diese Nervensignale so zu Stande: Der Rennläufer
kommt mit hoher Geschwindigkeit v zu besagter Stelle (sagen wir mit etwa 40 ms-1), an der
die Piste noch dazu ziemlich steil ist. Um nicht das dort vom Kurssetzer immer weit rechts
gesetzte „Pflichttor“ zu verfehlen, muss er eine ziemlich enge Rechtskurve – mit einem Radius R von sagen wir 15 m - fahren. Das Durchfahren dieser Kurve erfordert nach der obigen
Formel (3.8.1) eine Beschleunigung von
v2
. Damit der Rennläufer auch tatsächlich eine so
R
stark gekrümmte Bahn durchfährt, muss er dafür sorgen, dass der Pistenschnee auf ihn (oder genauer: auf seine Schi) eine Kraft von
mv 2
ausübt. Das muss er durch entsprechendes
R
Aufkanten seiner Schi erreichen, was den meisten Rennläufern auch gelingt. Nur ist diese
Kraft ziemlich groß. Da nach dem „Dritten Newtonschen Axiom“ der Rennläufer auf den
Schnee dieselbe Kraft ausüben muss wie der Schnee auf ihn, sehen wir, dass in dieser Kurve die Oberschenkelmuskulatur der Rennläufer sehr stark belastet wird. Diese Belastung ist
es, die die dort befindlichen Nerven dem Gehirn des Rennläufers melden, nicht die „Fliehkraft“!
Aber auch viele Nichtschifahrer geben an, dass sie „....die Fliehkraft ganz akut beim
schnellen Durchfahren einer Kurve mit dem Auto spüren". Ein einschlägiges Beispiel aus der
Lebenswelt der Schülerinnen und Schüler, sind die TV-Übertragungen von Formel-1Rennen. Dort heißt es (Heinz Prüller!), dass die Piloten in den Kurven enormen „Fliehkräften“
ausgesetzt sind. Nach dem Abfahrtsläufer in Bormio wissen wir bereits, was die Piloten in
„schnellen Kurven" spüren. Zunächst ist wieder eine große Kraft notwendig, um das Auto
durch die Kurve fahren zu lassen. Diese Kraft wird von den gut haftenden Reifen vermittelt,
deren Haftung durch den Druck der „Flügel“ noch verbessert wird. Mit den Reifen durchfährt
auch das damit fest verbundene Chassis die Kurve. Bei dieser Kurvenfahrt tritt wieder eine
hohe Beschleunigung auf. Damit der Pilot dieselbe Kurve durchfährt wie sein Chassis, muss
er dieselbe Beschleunigung mitmachen. Dies ist nur der Fall, wenn auf ihn auch die entsprechende Kraft wirkt. Diese Kraft wird von der festen Wand des „Monocoque“ vermittelt, die
(natürlich!) so stark gegen die Seite des Piloten presst, dass er dieselbe Kurve durchfährt,
wie sein Chassis. Für die hohen Kurvengeschwindigkeiten und die kleinen Kurvenradien ist
dies nach (3.8.1) eine große Kraft, die der Pilot nach dem „Dritten Newtonschen Axiom“ um62
gekehrt auch auf das Monocoque ausüben muss. Und wie übt sein Körper diese Kraft aus?
Der Körper des Piloten kann natürlich auf die Wand des „Monocque" keine Kraft ausüben,
wenn es dazwischen einen Luftspalt gäbe. Vielmehr muss der Pilot so eng an die Wand des
Monocoque heranrücken, dass sein Gewebe so weit zusammengedrückt wird, dass dessen
elastische Gegenkraft gleich groß wie die Kraft des Monocoque auf den Piloten wird. Da diese Kraft in schnellen Kurven sehr groß ist, wird das Körpergewebe des Piloten ziemlich stark
zusammengepresst. Und dieses Zusammenpressen seines Körpergewebes ist es, was die
Nerven seines Tastsinnes dem Gehirn des Piloten melden. Zu beachten ist auch, dass die
Richtung der sehr realen elastischen Kraft des Körpergewebes gleich gerichtet ist wie die
behauptete „Fliehkraft", nämlich vom Kurvenmittelpunkt weg! Vielleicht behaupten deshalb
manche Leute steif und fest, sie spürten deutlich eine nach außen gerichtete „Fliehkraft".
Leider gehören die TV-Kommentatoren auch zu
diesen Leuten!
Ganz
offensichtlich
lassen
sich
die
„Fliehkräfte" in der „Höllenzentrifuge", in einer
Loopingbahn und auf einer Achterbahn ganz
analog auf Körperempfindungen zurückführen.
Eine weitere Gruppe von Beispielen sind die
Innenlagen der Radfahrer und Eisschnellläufer
in den Kurven. Auch hier wird die „Fliehkraft" für
die Erklärung dieses Phänomens als unverzichtbar angesehen (obwohl es sie nicht gibt!).
Ich gehe kurz auf die Erklärung der Innenlage
Abb.25: Innenlage der Radfahrer in einer Kurve
des Eisschnellläufers ohne Fliehkraft ein, obgleich es sich dabei um kein „Massenpunktproblem" handelt. Damit will ich ausdrücken, dass der Eisschnellläufer (und ebenso der Radfahrer) nicht als Massenpunkt modelliert werden kann, da ja ein Massenpunkt keinen
Neigungswinkel zu einer Unterlage einnehmen kann. Vielmehr müssen wir das nächstkomplexere Modell für einen Körper zu Grunde legen, nämlich einen Starren Körper (vgl. S. 26).
Für einen solchen liefert die konsequente Anwendung der Newtonschen Mechanik zwei vektorielle Bewegungsgleichungen, eine für den Schwerpunkt und eine für die zeitliche Änderungsrate des Drehimpuls des Starren Körpers.
Um die einfachste Situation zu wählen,
die aber noch alles enthält, was uns in diesem
Augenblick interessiert, nehmen wir an, ein Eisschnellläufer der Gesamtmasse M durchfahre
mit konstantem Betrag der Geschwindigkeit v
Abb. 26: Einwirkungen auf das reale Objekt
„Eisschnellläufer“ modelliert als Kraftvektoren 63
(Angriffspunkte: S = Schwerpunkt; SS = Schlittschuh)
einen exakten Kreisbogen mit Radius R. In diesem Fall hat sein Drehimpuls nur eine Komponente senkrecht zum Eis, die zudem konstant ist. Die „Drehimpulsgleichung" lautet dann
einfach, dass die Summe der Drehmomente mit dem Schwerpunkt als Bezugspunkt Null ist.
v
Auf einen solchen Eisschnellläufer wirkt einerseits die Schwerkraft F G senkrecht nach unten
v
mit dem Angriffspunkt „Schwerpunkt", die Auflagekraft F A senkrecht nach oben mit dem Angriffspunkt „Schlittschuh", und die Reibungskraft (oder vielleicht auch „Haltekraft" des Eises)
v
F R mit dem Angriffspunkt „Schlittschuh" und der Richtung horizontal vom Schlittschuh zum
Mittelpunkt des durchfahrenen Kreises.
Die beiden Kräfte in vertikaler Richtung heben sich auf; es ist also
v
v
v
F G = F A = - Mg e z
Warum ist dies so? Weil nach unseren Annahmen der Eisschnellläufer dafür sorgt, dass sein
Schwerpunkt während der Kurvenfahrt auf gleicher Höhe bleibt. Das heißt, der Schwerpunkt
darf keine Beschleunigung in vertikaler Richtung erfahren. Dies wäre aber der Fall, wenn
sich die senkrechten Kräfte nicht zu Null ergänzten.
Da der Schwerpunkt des Starren Körpers also nur einen Kreisbogen vom Radius R
mit der Geschwindigkeit v durchläuft, erfährt er die Beschleunigung
v2
. Somit erhalten wir
R
als Bewegungsgleichung des Schwerpunktes
-
v
Mv 2 v
e r = - FR e r,
R
Da sich der Drehimpuls des Starren Körpers „Eisschnellläufer" zeitlich nicht ändert, erhalten
wir für dessen zeitliche Änderungsrate:
v
v
v
v v
v
v
0 = s × F A + s × F R = s × (F A +
v
v
= (- cosα e z + sinα e r) × (FA
v
F R)
v
v
e z - FR e r)
v
v
= - cosα FR (- e ϕ) - sinα FA e ϕ
v
= (cosα FR - sinα FA) e ϕ
Da wir die Größe der Kräfte FR und FA zu
Mv 2
beziehungsweise Mg kennen, erhalten wir
R
64
v
v
Mv 2
0 = (cosα
- sinαMg) e ϕ
R
und daraus über
Mv 2
cosα = Mg sinα schließlich
R
v2
= tanα.
Rg
Die erhaltene Gleichung ist anschaulich leicht verständlich: Je kleiner die Kurvengeschwindigkeit des Eisschnellläufers ist, umso kleiner ist auch der Winkel α und der Eisschnellläufer
hat kaum Innenlage. Ist hingegen der Radius des durchfahrenen Kreisbogens klein, so ist
der Winkel α groß und der Sportler weist eine deutliche Innenlage auf. Insbesondere betone
ich noch einmal, dass wir den Winkel für die Innenlage des Eisschnellläufers ohne jede Zuflucht zu einer „Fliehkraft" rein aus einer systematischen Anwendung der Newtonschen Mechanik erhalten haben.
3.9. Anhang: Die prinzipielle Berechnung
der Bahnkurve eines Massenpunktes
aus den Kräften und den Startbedingungen
Aus Abschnitt 3.6. wissen wir, dass die Bahn eines Massenpunktes bestimmt werden kann,
v
wenn uns die auf ihn wirkenden Kräfte und der Startort x(t 0 ) , sowie die Startgeschwindigkeit
v
v(t 0 ) relativ zu einem festgelegten Inertialsystem bekannt sind. Aus den zur Situation gehöv
renden Kräften bestimmen wir den resultierenden Kraftvektor F res(t0) mittels Vektoraddition.
Aus der Newtonschen Bewegungsgleichung erhalten wir die Startbeschleunigung als
v
Fres (t 0 )
v
.
a Newton(t0) =
m
v
Aus der Art und Weise, wie a Newton(t0) im Abschnitt 3.4. gewonnen wurde, wissen wir, dass in
v
v
v
v
v
∆v
einem hinreichend kleinen Zeitintervall ∆t a Newton(t0) =
, ist mit ∆v = v (t1) - v(t 0 ) . Damit
∆t
65
ist der Geschwindigkeitsvektor zum Zeitpunkt t0 + ∆t = t1 bestimmbar, und wir finden
v
v
v
v (t1) = v(t 0 ) + a Newton(t0) ∆t.
Wir müssen nun noch den Ort, an dem sich der Massenpunkt zum Zeitpunkt t1 befindet, bev
rechnen. In einem hinreichend kleinen Zeitintervall ∆t fällt ∆x mit der Bahnkurve zusammen
v
v
v
v
v
∆x
und v(t 0 ) =
, mit ∆x = x(t 1 ) - x(t 0 ) . Daraus erhalten wir sofort
∆t
v
v
v
x(t 1 ) = x(t 0 ) + v(t 0 ) ∆t .
v
v
v
v
Nun sind neben den Startwerten x (t0) und v (t0) auch x (t1) und v (t1) bekannt. Da wir am
Bahnpunkt t 1 die auf den Massenpunkt wirkenden Kräfte entnehmen können, ist es erneut
v
v
möglich den resultierenden Kraftvektor F res(t1) und damit den Beschleunigungsvektor a Newv
v
ton(t1) zu berechnen. Den Geschwindigkeitsvektor v (t2) und den Ortsvektor x (t2) können wir
analog zu oben bestimmen.
Durch die beschriebene Vorgangsweise erhalten wir zumindest prinzipiell Schritt für
Schritt neue Bahnpunkte des Massenpunktes und damit seine Bahnkurve (relativ zum festgelegten Inertialsystem). Wenn wir ausreichend Erfahrung mit der Lösung von Differentialgleichungen haben, können wir uns manchmal diese schrittweise Konstruktion der Bahn
ersparen - zum Verständnis der Behauptung, dass aus der Newtonschen Bewegungsgleichung und der Anfangsdaten der Bahn die gesamte Bahn konstruiert werden kann, ist diese
Methode(die ja der numerischen Berechnung von Bahnkurven zu Grunde liegt) aber viel
lehrreicher.
66
4. Literaturverzeichnis
ALBRECHT 2001: Klaus Albrecht: Physikunterricht als moderierter Dialog, PLUS
LUCIS 2/2001, 14-20.
ARECCHI 1996: F. T. Arecchi: „Complexity in Science: Models and Metaphors“, in „The
Emergence of Complexity in Mathematics, Physics, Chemistry, and Biology“, ed. B. Pullman,
Pontificia Academia Scientiarum, Vatican City, 1996, S. 141: „...We call ‚model‘ a finite set of
symbols (concepts and laws), which provide ‚fair‘ predictions for a given clqass of events....“
HESTENES 1996: David Hestenes: Modeling Methodology for Physics Teachers,
Proceedings of the International Conference on Undergraduate Physics Education (ICUPE),
College Park, MD (1996), American Institute of Physics, E. Redish and J. Rigden, Eds. :
„....However, some use the term [model] so loosely as not to discriminate between models
and theories.....“
HILDEGARDIS-SCHULE HAGEN: http://www.ha.shuttle.de/ha/hildegardis/mint/physik/materialien/arbeitsbl/gravges.pdf
HOFSTETTER 1988: Robert Hofstetter: Physik – compact – Themenheft „Philosophie, Ge-
sellschaft und Physik“. Wien: hpt
JAMMER 2000: Max Jammer: Concepts of mass in contemporary physics and philosophie.
Princeton, N.J.: Princeton Univ. Press
JAROS 1990: Albert Jaros, Alfred Nussbaumer, Peter Nussbaumer: Basiswissen 1.
Wien: hpt
KOHLES 2001: Michaela Kohles: Resonanz – Ein alltägliches Phänomen für die Schule auf-
bereitet. Universitätsbibliothek Innsbruck
KRAKER 1990: Kraker, Paill: Physik, Band 1 HTL. Wien: E. Dorner
67
LEPOLD 1985: Karl J. Lepold, Thekla Lepold: Physik 1 (Mechanik, Wärmelehre; Wellenlehre
mit Anwendungen auf Akustik und Optik, Relativitätstheorie). Wien: Österreichischer Gewerbeverlag
LEUBNER 2002: C. Leubner und Anna K. Puntajer: „Wie lässt sich das Modelldenken der
Physik Schülerinnen und Schülern nachhaltig vermitteln?“ PLUS LUCIS 2002 (in Vorbereitung)
PRONEGG 1993: Christian Pronegg: Einfache Mechanik im Schulunterricht: Betrachtung
des bisherigen Unterrichts und Aufbereitung eines schülergerechten Lehrbehelfs. Universitätsbibliothek Innsbruck
PUNTAJER 1998: Anna K. Puntajer: Die Methode der physikalischen Erkenntnisfindung
schülergerecht aufbereitet und veranschaulicht an Beispielen aus Physik und Alltag. Dissertation Universität Innsbruck
REICHEL 1992: Hans-Christian Reichel, Robert Müller, Josef Laub, Günter Hanisch: Lehr-
buch der Mathematik 6. Wien: hpt
SCHREINER 1982: Josef Schreiner: Physik1. Wien: hpt
SEGRE 1997: Emilio Segrè: Die großen Physiker und ihre Entdeckungen – Von den fallen-
den Körpern zu den Quarks. München: Piper Verlag GmbH
SEXL 1992: Sexl, Raab und Streeruwitz: Physik 1. Wien: hpt
68
5. Verzeichnis der Bildquellen
Abb. 1: Anna K. Puntajer: Die Methode der physikalischen Erkenntnisfindung schülergerecht
aufbereitet und veranschaulicht an Beispielen aus Physik und Alltag. Dissertation Universität Innsbruck 1998
Abb. 2: Christian Pronegg: Einfache Mechanik im Schulunterricht: Betrachtung des bisheri-
gen Unterrichts und Aufbereitung eines schülergerechten Lehrbehelfs. Universitätsbibliothek Innsbruck 1993
Abb. 22: http://www.zum.de/Faecher/D/Saar/gym/philosoph/arist-ges.htm
Abb. 23: http://www-groups.dcs.st-and.ac.uk/~history/PictDisplay/Galileo.html
Abb. 24: http://www.chemie.uni-bremen.de/stohrer/biograph/newton.htm
Abb. 25: Graphikprogramm Printmaster (Graphik – CD 2)
69