Vorlesung_Geschmiert..
Werbung

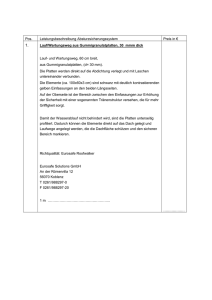
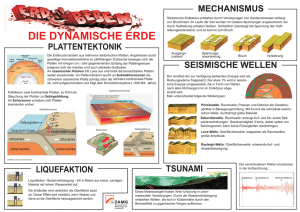
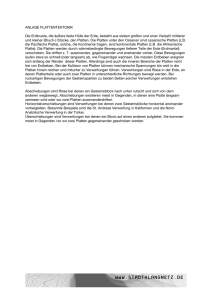
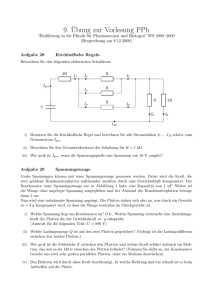
14 Geschmierte Systeme Zur Verminderung der Reibungskraft und des Verschleißes werden seit Jahrtausenden Schmiermittel eingesetzt, deren Wirkung darauf beruht, dass direkter Kontakt zwischen zwei Festkörpern verhindert und dadurch die trockene Reibung durch die Flüssigkeitsreibung ersetzt wird. Die Anwesenheit einer Flüssigkeitsschicht zwischen zwei Festkörpern beeinflusst aber nicht nur Tangentialkräfte sondern auch Normalkräfte: Zwei trockene Glasscheiben können ohne Mühe auseinandergenommen werden, während zum Auseinandernehmen von zwei nassen Scheiben eine erhebliche Kraft erforderlich sein kann. Dieses Phänomen kann zum einen auf die Kapillarkräfte zurückgeführt werden, die wir im nächsten Kapitel diskutieren, zum anderen kann von rein hydrodynamischer Natur sein: Eine viskose Flüssigkeit braucht eine gewisse Zeit um in einem engen Spalt zwischen zwei Scheiben „zusammenzufließen“. Diese Erscheinung führt bei dynamischen Beanspruchungen zu einer scheinbaren „Adhäsion“ zwischen geschmierten Körpern, die wir als „viskose Adhäsion“ bezeichnen. In geschmierten Tribosystemen haben wir es in den meisten Fällen mit nicht turbulenten Strömungen zu tun. Die Schmiermittel können weiterhin in guter Näherung als inkompressibel angenommen werden. Die Grundlage für die Theorie der hydrodynamischen Schmierung und der viskosen Adhäsion bildet die stationäre Strömung zwischen zwei parallelen Platten. 14.1 Strömung zwischen zwei parallelen Platten. Die Dynamik einer linear-viskosen (Newtonschen) Flüssigkeit wird durch die Navier-StokesGleichung gegeben, die für inkompressible Flüssigkeiten die folgende Form annimmt G dv G ρ = −∇p + ηΔv . (1.1) dt wobei ρ die Dichte und η die dynamische Viskosität der Flüssigkeit sind. Eine inkompressible Flüssigkeit genügt darüber hinaus der Gleichung G divv = 0 . (1.2) Bei quasistatischen Strömungen (so genannte schleichende Strömungen), mit denen wir in den Schmierungsproblemen meistens zu tun haben, kann der Trägheitsterm in der NavierStokes-Gleichung vernachlässigt werden und sie nimmt die folgende Form an G ηΔv = ∇p . (1.3) Betrachten wir jetzt zwei Platten getrennt durch eine flüssige Schicht (Bild 1). Im allgemeinen Fall können sich die Platten relativ zu einander bewegen. Ohne Einschränkung der Allgemeinheit können wir die Geschwindigkeit der unteren Platte als Null annehmen. Die Geschwindigkeit der oberen Platte bezeichnen wir durch v0 . v0 z h x Bild 1. Wir betrachten eine stationäre Strömung in der x-Richtung. Demnach hat die Geschwindigkeit G nur die x-Komponente, die aber nur von der z-Koordinate abhängt: v = ( v ( z ),0 ) . Die Gleichung (1.3) nimmt die folgende Form an ⎛ ∂2 ∂p ∂2 ⎞ ∂ 2v = η ⎜ 2 + 2 ⎟ vx = η 2 ∂x ∂z ⎠ ∂z ⎝ ∂x (1.4) ⎛ ∂2 ∂p ∂2 ⎞ = η ⎜ 2 + 2 ⎟ vz = 0 ∂z ∂z ⎠ ⎝ ∂x (1.5) Aus (1.5) folgt, dass der Druck von der vertikalen Koordinate z nicht abhängt: p = p( x ) . Zweimalige Integration von (1.4) ergibt ηv = ∂p z 2 ⋅ + C1 z + C2 ∂x 2 (1.6) Aus den Randbedingungen v (0) = 0 und v ( h ) = v0 folgt C2 = 0 und C1 = η v0 d − ∂p h ⋅ . Die ∂x 2 Geschwindigkeitsverteilung wird somit mit ηv = ∂p z( z − h ) η v0 ⋅ + z h 2 ∂x (1.7) gegeben. 14.2 Hydrodynamische Reibung v Bild 2. Betrachten wir jetzt zwei im Bild 2 skizzierte Körper. Die Oberfläche des einen sei etwas geneigt relativ zur Oberfläche des zweiten Körpers, die wir hier als absolut eben und glatt annehmen. Bei kleiner Neigung kann man die Strömung an jedem Punkt als eine Strömung zwischen zwei parallelen Platten betrachten und für die Geschwindigkeitsverteilung die Gleichung (1.7) benutzen: z ( z − h ) v0 v = p '⋅ + z (1.8) h 2η Hier haben wir den Druckgradienten mit p ' bezeichnet. Aus der Massenerhaltung folgt, dass die über jeden Querschnitt pro Zeiteinheit fließende Flüssigkeitsmenge konstant ist: ⎛ z ( z − h ) v0 + Q = ∫ v ( z )dz = ∫ ⎜ p '⋅ 2η h 0 0⎝ h h ⎞ h 3 v0 h + = const z ⎟ dz = − p ' 12η 2 ⎠ Für den Druckgradienten erhalten wir demnach (1.9) dp ⎛ 1 C⎞ = −6η v0 ⎜ 2 − 3 ⎟ . dx h ⎠ ⎝h (1.10) Bei einem linearen Anstieg der Höhe h = h0 + ax kann (1.10) explizit integriert werden und wir bekommen für den Druck 6η v0 ⎛ 1 C ⎞ ⎛ 1 C⎞ p = pext − 6η v0 ∫ ⎜ 2 − 3 ⎟dx = pext − ⎜ − ⎟dh h h ⎠ a h∫0 ⎝ h 2 h 3 ⎠ x0 ⎝ x = pext − h ⎛ 1 6η v0 ⎛ ⎛ 1 1 ⎞ 1 ⎞⎞ ⎜⎜ ⎜ − ⎟ − 2C ⎜ 2 − 2 ⎟ ⎟⎟ a ⎝ ⎝ h h0 ⎠ h0 ⎠ ⎠ ⎝h Bei der bestimmten Integration haben wir berücksichtigt, dass p( x0 ) = pext ist. Auf der anderen Seite ist der Druck ebenfalls gleich dem Aussendruck pext , woraus sich ergibt: hh 2C = 0 1 . Für die Druckverteilung erhalten wir somit h0 + h1 p = pext − 6η v0 ⎛ ⎛ 1 1 ⎞ h0 h1 ⎛ 1 1 ⎞⎞ ⎜⎜ ⎜ − ⎟ − ⎜ 2 − 2 ⎟ ⎟⎟ a ⎝ ⎝ h h0 ⎠ h0 + h1 ⎝ h h0 ⎠ ⎠ (1.11) Sind sowohl die Geschwindigkeitsverteilung als auch die Druckverteilung bekannt, so kann man leicht die x- und z-Komponenten der auf den oberen Körper wirkenden Kraft berechnen. Für die vertikale Kraftkomponente gilt η ABx v0 L = ∫ dxdy ( p − pext ) = α (1.12) h02 mit α = ⎡ 2(ξ − 1) ⎤ ⎢ln ξ − ξ + 1 ⎥ und ξ = h1 / h0 . (ξ − 1) ⎣ ⎦ 6 2 Die horizontale Kraftkomponente ist durch die viskose Spannung σ xz = η berechnet sich zu ∂v η Av0 F = η ∫ dxdy = β ∂ z h 0 A z =0 1 ⎡ 6(ξ − 1) ⎤ . 4ln ξ − ⎢ ξ −1⎣ ξ + 1 ⎥⎦ Die Abhängigkeit der Parameter α und β von ξ ist im Bild 3 gezeigt. mit β = Bild 3. Für den Reibungskoeffizienten erhalten wir ∂v verursacht und ∂z (1.13) k= F ⎛ h0 ⎞ β =⎜ ⎟ . L ⎝ Bx ⎠ α (1.14) Der Reibungskoeffizient hängt von dem im Kontaktgebiet herrschenden mittleren Druck ab. Wenn wir die Spaltbreite h0 aus (1.12) berechnen und in (1.14) einsetzen, erhalten wir A η v0 ⋅ . (1.15) α Bx P P ist hier der mittlere Druck im Kontaktgebiet: P = L / A . Bei gleichen geometrischen ηv Bedingungen ist der Reibungskoeffizient eine Funktion der Parameterkombination 0 . Je P Größer der Druck, desto kleiner der Reibungskoeffizient. Zu beachten ist aber, dass die ηv Spaltdicke mit dem steigenden Druck ebenfalls abnimmt: h0 = α Bx 0 . Bei ausreichend P kleinen Spaltdicken bricht die oben stehende Theorie zusammen, da der Einfluss von Rauhigkeiten wesentlich wird und das System in das Gebiet der Grenzschichtreibung übergeht. Bei noch größeren Drucken steigt deshalb der Reibungskoeffizient wieder an. Die η v0 Abhängigkeit des Reibungskoeffizienten von dem Parameter nennt man „StribeckP Kurve“. Sie beschreibt die Abhängigkeit von allen auftretenden Parametern. Insbesondere bestimmt sie die Abhängigkeit der Reibungskraft in einem geschmierten System von der η v0 hat diese Abhängigkeit einen universellen Geschwindigkeit. Bei großen Werten von P Charakter. Im Bereich der Grenzschichtreibung dagegen hängt der Verlauf der Kurve von Eigenschaften der Fläche und der Schmiermittel ab. k=β Bild 4 Zur Grenzschichtenreibung kommt es auch bei einer Verminderung der Gleitgeschwindigkeit. Je größer die Geschwindigkeit, desto größer die Schichtdicke des Schmiermittels und desto seltener kommen die Flächen in direkten Kontakt an Rauhigkeiten. Das sieht man an experimentellen Ergebnissen im Bild 5. Bild 5. 14.3 „Viskose Adhäsion“ Befindet sich zwischen zwei Körpern eine flüssige Schicht, so können diese weder schnell an einander gedrückt noch schnell getrennt werden. Der letztere Effekt wird oft als eine Art „Adhäsion“ empfunden. Bei dynamischen Vorgängen ist es oft schwer zwischen einer „echten“ Adhäsion (die entweder durch die Oberflächenkräfte zwischen Festkörpern oder Kapillarbrücken bedingt ist) und dieser „viskosen Adhäsion“ zu unterscheiden. Die Annäherung zweier Körper mit einer flüssigen Zwischenschicht kann nur durch „Ausquetschen“ der Schicht passieren. Bei der Trennung muss die Flüssigkeit wieder in den Spalt einfließen, es sei denn die Trennung geschieht durch Sieden (Bildung und Zusammenfließen von Dampfblasen). Beide Prozesse erfordern jedoch eine bestimmte Zeit. Wir beginnen mit der Betrachtung der Annäherung zweier runder Platten mir dem Radius R mit einer flüssigen Zwischenschicht (Bild). Bild. Die durch die vertikale Annährung von Platten ausgequetschte Flüssigkeit führt zu einer radialen Strömung. Aus Symmetriegründen ist klar, dass die Strömungsgeschwindigkeit radial symmetrisch ist. Ist die Dicke des Spaltes zwischen den Platten viel kleiner, als der Radius der Platten, so ist die radiale Komponente der Geschwindigkeit viel größer als die Annährungsgeschwindigkeit und wir haben es im wesentlichen mit der Strömung unter der Wirkung eines Druckgradienten zu tun, die wir im vorigen Paragraphen betrachtet haben. Die Geschwindigkeit ist demnach gleich v = p' z( z − h ) 2η (1.16) wobei p ' = ∂p / ∂r . Der Volumenstrom durch eine zylindrische Fläche mir dem Radius r ist πr h π rh3 . Q = ∫ 2π rv ( z )dz = p ' ∫ z ( z − h )dz = − p ' 6η η 0 0 h (1.17) Dieser Strom muss andererseits gleich dem Volumenstrom Q = −π r 2 h durch die obere Fläche der Schicht dank der vertikalen Bewegung der oberen Platte sein: π rh 3 2 −π r h = p ' . (1.18) 6η 6ηπ rh Für den Druckgradienten ergibt sich daraus p ' = oder nach einer einmaligen π h3 Integration 6ηπ h 3ηπ h 2 p= rdr = r +C . (1.19) 3 ∫ πh π h3 Die Integrationskonstante bestimmt sich aus der Randbedingung p( r = R) = p0 (Aussendruck): 3ηπ h 2 3ηπ h 2 C p R . p0 = R + C , = − (1.20) 0 π h3 π h3 Die Druckverteilung (1.19) nimmt somit endgültig die Form 3ηπ h 2 p= r − R 2 ) + p0 (1.21) 3 ( πh an. Berechnen wir die auf die vertikale Platte wirkende Druckkraft R R 6ηπ h 3ηπ h 4 2 2 (1.22) − = − F = ∫ 2π r ( p( r ) − p0 ) dr = r R rdr R . ( ) 2h 3 h 3 ∫0 0 Bei der vorgegebenen Kraft können wir jetzt die Zeit berechnen, die gebraucht wird, damit sich die Platten von einem Abstand h0 bis zum Abstand h annähern: t h 2F dh ∫0 3ηπ R4 dt = − h∫ h3 , 0 2F 1⎛ 1 1⎞ (1.23) t = ⎜ 2 − 2 ⎟. 4 h0 ⎠ 3ηπ R 2⎝ h Bei großen Anfangsabständen hängt diese Zeit praktisch nur von dem minimalen Abstand ab, der zu erreichen ist: 3ηπ R 4 t= . (1.24) 4 Fh 2 Hängt die Kraft F von der Zeit ab, so gilt t 3ηπ R 4 ( ) F t dt = . ∫0 4h 2 Das heißt, die minimale erreichbare Schichtdicke hängt nur vom Kraftstoß ab. (1.25) Zur Illustration dieser Idee betrachten wir einen mit einer viskosen Flüssigkeit beschmierten Körper, der gegen die Decke mit der Geschwindigkeit v geworfen wird. Wie lange wird er anschließend an der Decke hängen bleiben? Vor dem Stoß ist der Impuls des Körpers gleich Mv . Er wird während des Stoßes durch den Kraftstoß auf Null gebracht. Der Kraftstoß ist demnach auch gleich Mv . Da der Kraftstoß zur Annäherung bis zum Abstand h gleich dem Kraftstoß zum Trennen vom Abstand h ist, muss der Kraftstoß der Schwerekraft bis zum Abreißen Mgt gleich Mv sein. Daraus folgt, dass t = v g . Das gilt nur für Newtonsche Flüssigkeiten. Impuls = Mv F = Mg Aus (1.25) folgt, dass die viskose Adhäsion mit Newtonschen Flüssigkeiten zum Gehen auf der Decke nicht benutzt werden kann. Anders ist es, wenn die Viskosität einer Flüssigkeit vom Geschwindigkeitsgradienten abhängig ist. Wie man der Gleichung (1.25) entnehmen kann, ist der Kraftstoß zur Annäherung bis zur Schichtdicke h (bzw. zum Auseinandernehmen der Platten vom Abstand h) proportional zur Viskosität. Bei nichtlinear viskosen Flüssigkeiten hängt die Viskosität von der Geschwindigkeit ab. Schiebt man die Platten zunächst sehr schnell zusammen und dann langsam auseinander, so ist der positive Kraftstoß bei der Annährung kleiner als der negative bei Auseinandernehmen der Platten. Diese Differenz kann dazu benutzt werden, um einen sich so bewegenden Körper im Gleichgewicht an der Decke zu halten. In diesem Zusammenhang ist zu bemerken, dass die Videoaufnahmen von auf der Decke spazierenden Fliegen zeigen, dass sie die Füße an die feste Oberfläche sehr schnell andrücken (mit einem Schlag). Die Entfernung des Fußes von der Oberfläche passiert viel langsamer. Das könnte bedeuten, dass die Haltekraft der Fliegen auf der Decke mindestens zum Teil durch die „viskose Adhäsion“ bedingt ist. η = η (v h) 3πη1R 4 Impuls = 4h 2 Bild. < 3πη2 R 4 Impuls = 4h 2