Method Detail
Werbung

DIPLOMARBEIT
WWW-Anbindung des Skriptums
für „Fehlertolerante Systeme“
ausgeführt am Institut für Computertechnik
der Technischen Universität Wien
unter der Anleitung von
o. Univ. Prof. Dr. Dietmar Dietrich
und
Dipl. - Ing. Dr. Thilo Sauter
ausgeführt durch
Roland RUßWURM
Schloßgasse 12
3264 Gresten
Matr. Nr. 9225885
Wien, 17. November 2002
___________________________________
(Roland Rußwurm)
Inhaltsverzeichnis
1
EINLEITUNG ....................................................................................................... 2
ABSTRACT ................................................................................................................. 2
2
WWW-ANBINDUNG............................................................................................ 4
2.1
EINLEITUNG .................................................................................................... 4
2.2
GRUNDLAGEN DER WWW DARSTELLUNG ......................................................... 4
2.2.1
Knoten ................................................................................................... 5
2.2.2
Verweise ................................................................................................ 5
2.2.3
Browser.................................................................................................. 6
2.2.4
Aufteilung der Informationen in Knoten.................................................. 7
2.2.5
Probleme bei Verweisen ........................................................................ 8
2.2.6
Struktur eines Hypertextsystems ........................................................... 8
2.2.7
Das Framing-Problem............................................................................ 9
2.3
ARCHITEKTUR EINES HYPERTEXTSYSTEMS ........................................................ 9
2.3.1
Datenbasis Schicht ..............................................................................10
2.3.2
HAM-Schicht........................................................................................10
2.3.3
Präsentationsschicht............................................................................10
2.4
DESIGNRICHTLINIEN BEI DER ERSTELLUNG VON HYPERTEXT DOKUMENTEN ......11
2.4.1
Allgemeines .........................................................................................12
2.4.2
Definition der einzelnen Seiten ............................................................12
2.4.3
Grafiken ...............................................................................................14
2.4.4
Text......................................................................................................14
2.4.5
Verweise ..............................................................................................15
2.5
EINBINDUNG DES SKRIPTUMS „FEHLERTOLERANTE SYSTEME“...........................16
2.5.1
Struktur ................................................................................................16
2.5.2
Bildschirmaufbau .................................................................................17
2.5.3
Drucktext..............................................................................................17
2.5.4
Grafiken ...............................................................................................18
3
VERTEILUNGSFUNKTIONEN ..........................................................................20
3.1
ZUFALLSGRÖßEN, DICHTE- UND VERTEILUNGSFUNKTIONEN ..............................20
3.2
PARAMETER EINER VERTEILUNG .....................................................................25
3.2.1
Erwartungswert....................................................................................25
3.2.2
Standardabweichung und Varianz ......................................................26
3.2.3
Momente..............................................................................................28
3.3
DISKRETE VERTEILUNGEN ..............................................................................32
3.3.1
Zweistufige Grundgesamtheit und Urnenmodell ..................................32
3.3.2
Binomialverteilung ...............................................................................32
3.3.3
Hypergeometrische Verteilung.............................................................35
3.3.4
Poissonverteilung ................................................................................35
3.4
STETIGE VERTEILUNGEN ................................................................................38
3.4.1
Linearverteilung ...................................................................................38
3.4.2
Rechteckverteilung ..............................................................................38
3.4.3
Normalverteilung..................................................................................39
3.4.4
Normierte Normalverteilung .................................................................42
3.4.5
Logarithmische Normalverteilung ........................................................44
3.4.6
Exponentialverteilung ..........................................................................45
3.4.7
Weibull-Verteilung................................................................................46
3.4.8
3-parametrige Weibull-Verteilung : ......................................................47
3.5
LEBENSDAUERVERTEILUNG ............................................................................48
3.5.1
Definitionen..........................................................................................48
3.5.2
Badewannenkurve ...............................................................................52
3.6
AUSFALLRATE ...............................................................................................54
3.6.1
Ausfallarten..........................................................................................54
4 WAHRSCHEINLICHKEITSBERECHNUNGEN FÜR SERIEN- UND
PARALLELSCHALTUNGEN....................................................................................56
4.1
DEFINITIONEN ...............................................................................................56
4.2
ZUVERLÄSSIGKEITSSCHALTBILD ......................................................................56
4.3
WAHRSCHEINLICHKEITEN VON SYSTEMEN .......................................................57
4.3.1
Seriensystem .......................................................................................57
4.3.2
Parallelsystem .....................................................................................59
4.3.3
Serienparallelsystem ...........................................................................60
4.3.4
Vernetztes System...............................................................................63
4.4
DUALITÄTSPRINZIP.........................................................................................64
4.5
MODELLIERUNG.............................................................................................66
4.5.1
Einführung ...........................................................................................66
4.5.2
Beschreibung der Simulation ...............................................................66
4.5.3
Programmübersicht „Monte Carlo“ Simulation .....................................67
4.5.4
Histogramm .........................................................................................69
4.5.5
Probleme bei der Simulation................................................................72
4.6
TEILREDUNDANZ............................................................................................74
4.6.1
Definitionen..........................................................................................74
4.6.2
(k von n) System..................................................................................74
5 ZUVERLÄSSIGKEIT UND SICHERHEIT VON SERIEN- UND
PARALLELSYSTEMEN ...........................................................................................78
5.1
DEFINITIONEN ...............................................................................................78
5.1.1
Zuverlässigkeit.....................................................................................78
5.1.2
Ausfall..................................................................................................80
5.1.3
Ausfallrate............................................................................................80
5.1.4
Verfügbarkeit .......................................................................................82
5.1.5
Sicherheit.............................................................................................83
5.1.6
Qualität ................................................................................................83
5.2
NMR-SYSTEME ............................................................................................84
5.2.1
Funktion ...............................................................................................84
5.2.2
Zuverlässigkeit des Systems ...............................................................85
5.2.3
Voter ....................................................................................................85
5.2.4
TMR-Systeme......................................................................................86
5.3
FEHLERBAUMANALYSE ...................................................................................88
5.4
STANDBY-SYSTEME .......................................................................................92
5.4.1
Funktion ...............................................................................................92
5.4.2
Cold-Standby .......................................................................................92
5.4.3
Hot-Standby.........................................................................................95
5.4.4
Fehlererkennung..................................................................................96
5.4.5
Umschalter...........................................................................................96
5.4.6
Fail-Soft-Systeme ................................................................................97
5.4.7
Fail-Safe-Systeme ...............................................................................98
LITERATUR............................................................................................................ 100
DOKUMENTATION ................................................................................................ 104
5.5
CLASS HIERARCHY ...................................................................................... 105
5.6
CLASS DISTCANVAS .................................................................................... 106
5.7
CLASS MYCANVAS ...................................................................................... 108
5.8
CLASS DISTRIPANEL.................................................................................... 111
5.9
CLASS GLOBALPANEL ................................................................................. 112
5.10 CLASS LOCALPANEL.................................................................................... 114
5.10.1 LocalPanel ......................................................................................... 114
5.11 CLASS DISTRIBUTIONSCREEN ...................................................................... 115
5.12 CLASS HELPSCREEN ................................................................................... 117
5.13 CLASS INFO SCREEN .................................................................................... 119
5.14 CLASS MONTECARLO .................................................................................. 121
DANKSAGUNG ...................................................................................................... 124
1 Einleitung
Seite 1
1 Einleitung
1 Einleitung
Die folgende Arbeit zeigt die Möglichkeiten der Darstellung von wissenschaftlichen
Unterlagen im World Wide Web und deren Einsatzmöglichkeiten auf.
Als Beispiel wurde eine Ausarbeitung für die Vorlesung „Fehlertolerante Systeme“
herangezogen. Neben der Behandlung von Verteilungsfunktionen und der Wahrscheinlichkeitsberechnung von Serien- und Parallelsystemen wird auch die Zuverlässigkeit und Sicherheit von solchen Systemen betrachtet. Um die Theorie auch praktisch begreiflich zu machen, wurde eine Java basierte Software inkludiert welche die
Simulation von fehlertoleranten Systemen im Web ermöglicht.
Abstract
The diploma thesis shows the possibilities for presenting scientific papers on the
Internet. As an example the material for a lecture about “reliable systems” was elaborated.
The theoretical part covers distribution functions and probability of parallel- and serial
systems. Additionally, the reliability and safety of technical systems is covered from a
mathematical viewpoint. To show the practical implications of such systems there is a
Java software available to simulate the behaviour of a complex system consisting of
serial and parallel elements.
Seite 2
1 Einleitung
Seite 3
2 WWW-Anbindung
2 WWW-Anbindung
2.1 Einleitung
Sämtliche Unterlagen, die für Fehlertolerante Systeme erstellt wurden, sollen im Internet präsent sein. Erstens ermöglicht dies einen einfacheren und schnelleren Zugang zu den Informationen. Andererseits können Studenten oder andere Interessierte sehr kostengünstig zu der benötigten Information gelangen und nur jene Teile
laden und eventuell ausdrucken, welche für sie relevant sind.
Da es sich bei dieser Form der Darstellung um ein anderes Medium handelt als bei
normalen Skripten bzw. Büchern, wird zuerst noch auf die Besonderheiten der elektronischen Publikation eingegangen. Die daraus gewonnen Erkenntnisse sollen danach für die elektronische Darstellung dieses Skriptums verwendet werden.
Einer der entscheidenden Unterschiede zwischen Hypertext/media und konventionellen Medien liegt darin, dass der Anwender selbst entscheidet, welche Information
er beachtet und welche Informationen er vernachlässigt. Geht man zum Beispiel davon aus, dass jemand jeden Tag eine Stunde Nachrichten konsumiert, so verbringt
er im Laufe seines Lebens an die 20.000 Stunden damit, sich über das Weltgeschehen zu informieren. Würde man diese Zeit halbieren (etwa durch Nichtbeachtung der
uninteressanten Nachrichten durch Einsatz eines Hypertextsystems) so würde das
einer Steigerung der effektiv verfügbaren Zeit um ein Jahr entsprechen [NIEL90]. In
diesem einfachen Beispiel zeigt sich bereits das mögliche Potential durch diese neue
Form der Informationsdarstellung.
2.2 Grundlagen der WWW Darstellung
Werden Informationen elektronisch in einer Datenbank abgelegt, diese Informationen
in handliche Einheiten aufgeteilt und mit Verweisen verbunden, dann spricht man von
einem Hypertextsystem. Das Lesen des Hypertextes erfolgt im Gegensatz zu konventionellen Medien (Bücher, Video, Zeitschriften,...) nicht linear. Damit ist der Weg
des Benutzers durch die Informationen nicht vorgegeben, sondern kann interaktiv
von ihm mitbestimmt werden. Ein weiterer wichtiger Punkt bei dieser Definition ist die
Aufgabe des Hypertextsystems, dem Benutzer die gesuchten Informationen so
schnell wie möglich zu liefern. Die Anordnung der Informationen und die Verbindungen zwischen diesen Informationseinheiten sollen so ausgelegt sein, dass der Benutzer mit möglichst geringem Zeitaufwand seine gewünschte Information findet.
Bestehen die Informationen zu einem erheblichen Teil aus Multimediakomponenten
(Bilder, Musik, Videosequenzen), spricht man auch von einem Hypermediasystem.
Seite 4
2 WWW-Anbindung
Ein sehr wichtiger Punkt bei der Erstellung von Hypertext ist das Verständnis der Zusammenhänge zwischen den einzelnen Informationsobjekten sowie die Auswirkung
des Systems auf den menschlichen Benutzer. Deshalb wird zuerst eine Definition der
einzelnen
Komponenten eines Systems vorgenommen.
Inhalt
Thema eins
Thema zwei
Thema drei
Informationen zu
Thema eins.
Mehr über
Thema zwei
folgt.
Thema zwei
ist auch ein
Knoten.
Thema eins
und Thema
drei ebenfalls.
2.2.1 Knoten1
Thema drei.
Aber Thema
zwei und Thema
zwei, mitte hat
auch Infos.
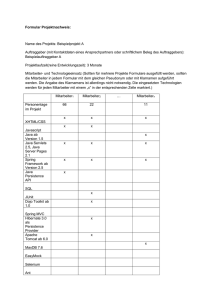
Abb. 2.1. : Knoten und Verzweigungen
Unter einem Knoten
versteht man eine
Einheit von Informationen, welche dem
Anwender präsentiert werden. Ein
Knoten wird als eine
Seite, welche auch
über mehrere Bildschirme
reichen
kann, dargestellt und
sollte nur zusammengehörige Informationen beinhalten.
Wie groß einzelne
Knoten
gestaltet
werden, darüber gibt es unterschiedlichste Ansichten. Da dies ein sehr wichtiger
Punkt bei der Gestaltung eines Hypertextsystems ist, soll später noch ausführlicher
darauf eingegangen werden.
2.2.2 Verweise2
Um die Verbindung zwischen unterschiedlichen Knoten herzustellen, werden Verweise benutzt. Diese Verweise können aus markierten Teilen im Text oder auch als
Grafiksymbole dargestellt werden. Die Verbindung zweier Knoten durch einen Verweis kann sowohl in nur einer Richtung stattfinden als auch bidirektional sein.
1
2
Oft auch als „node“ bezeichnet
Findet man häufig auch unter der Bezeichnung „link“
Seite 5
2 WWW-Anbindung
Als eine Sonderform des Verweises können Anmerkungen3 betrachtet werden. Diese
entsprechen der Funktion einer Fußnote in einem konventionellen Text und können
in einem eigenen Fenster oder in einem reservierten Bildschirmbereich dargestellt
werden. Dadurch verliert der Benutzer den Text nicht aus dem Blickfeld und kann
dennoch Zusatzinformationen erhalten.
Auch die Verzweigung zu Referenzseiten oder Referenzinformationen kann mit Verweisen realisiert werden. Hier sollte allerdings darauf geachtet werden, dass die referenzierten Seiten auch gültig sind. Besonders bei schnelllebigen Referenzseiten sollte in regelmäßigen Abständen überprüft werden, ob der Verweis auch noch an die
richtige Stelle verweist.
Eine weitere Anwendungsmöglichkeit von Verweisen besteht darin, dass damit andere Programme gestartet werden, wie z.B. eine Tabellenkalkulation oder ein Textverarbeitungsprogramm.
Verweise selbst können auch dynamisch sein, um dem Benutzer die Funktion des
Verweises deutlicher vor Augen zu führen. Als Anwendungsgebiet denke man nur an
Verweise auf Audio- oder Videomaterial.
Weiters stellt sich die Frage, ob Verweise nur an den Beginn von Knoten verweisen,
also jeweils an den Beginn einer Informationseinheit, oder auch an beliebige Stellen
im Knoten.
Für die Klarheit und Übersichtlichkeit des Hypertextsystems ist es eindeutig günstiger, nur an den Beginn von Knoten zu verweisen. Möchte man allerdings präzise
Verweise verwenden, so lässt sich das nur mit Verweisen an Stellen innerhalb von
Knoten realisieren. Dabei sollte allerdings berücksichtigt werden, dass der Lesefluss
(Informationsfluss) des Benutzers unabhängig vom verwendeten Verweis nicht gestört werden sollte.
2.2.3 Browser
Unter einem Browser versteht man ein Programm, welches zur Darstellung von Hypertextinformationen dient und die Schnittstelle zum Benutzer schafft. Da ein Browser nur Informationen darstellen kann, deren Protokoll er dekodieren kann, ist ein
wichtiger Gesichtspunkt die Unterstützung aller gängigen Protokoll- und Medienformate.
3
Auch als „annotations“ bezeichnet
Seite 6
2 WWW-Anbindung
2.2.4 Aufteilung der Informationen in Knoten
Sehr oft stellt sich die Aufgabe, bereits vorhandene Texte oder Informationen an ein
Hypertextsystem anzupassen bzw. umzuwandeln. Eine der wichtigsten Aufgaben
dabei ist die Aufteilung des vorhandenen Materials in einzelne Informationseinheiten,
sogenannte Knoten.
Hier soll kurz auf diese Möglichkeiten der Unterteilung eingegangen werden.
Bei der Aufteilung eines Textes in einzelne Einheiten ergeben sich prinzipiell drei
Möglichkeiten :
•
Lineare Struktur
Das Dokument erhält eine lineare Struktur wie auch in konventionellen Texten.
Der Text wird gelesen durch Weiterblättern der Seiten. Durch zusätzliche Links
können Sprünge zu anderen Textstellen oder anderen Dokumenten ausgeführt
werden. Durch Verwendung dieser einfachen Struktur lässt sich zwar eine Umsetzung eines vorhandenen Textes in einen Hypertext am schnellsten realisieren,
allerdings werden die Vorzüge des Hypertextsystems am schlechtesten genutzt.
•
Karten4
Das Dokument wird in kleine Informationseinheiten unterteilt, welche entweder
vom Autor festgesetzt werden oder durch die Größe des Bildschirms vorgegeben
wird. Damit ergibt sich für den Anwender der Vorteil von kleinen und übersichtlichen Informationseinheiten (im Idealfall passt eine Informationseinheit vollständig
auf den Bildschirm). Allerdings kann es durch schlechte Auswahl dieser Karten
zu einer sehr ungünstigen Reihenfolge durch Verweise kommen. Dieses Problem,
auch „Chunking Problem“ genannt, wird besonders durch die unterschiedliche
„Sichtweise“ des Autors und des Anwenders verstärkt. Ein Vorteil bei der Verwendung dieser Struktur liegt in den verschiedenen Möglichkeiten des Benutzers
das vorhandene Dokument zu betrachten. Der Benutzer kann sich auf einem vorgegebenen Pfad des Autors bewegen (meist durch eine Art Inhaltsverzeichnis
vorgegeben) oder auch völlig selbständig durch das Dokument wandern.
•
Fragmentierte Ansichten
Bei dieser Methode der Darstellung wird versucht, die Informationseinheiten so
weit wie möglich aufzuteilen. Das heißt, einzelne Sätze ebenso wie einzelne
Phrasen werden als abgeschlossene Informationseinheiten betrachtet, welche bei
4
Oft wird in der Literatur hier auch der Begriff „chunks“ oder „cards“ verwendet
Seite 7
2 WWW-Anbindung
Bedarf dem Anwender präsentiert werden. Dies können einerseits Informationen
sein, welche einem Dokument zugeordnet werden, wie auch Informationen von
externen Quellen.
Diese Art der Präsentation von Information ist zwar eine der interessantesten und
mit Sicherheit auch flexibelsten, hat dadurch jedoch auch den Nachteil, sehr
komplex in der Zusammenstellung der Datenbasis zu sein.
Ein weiteres Problem bei der Darstellung von Informationen ist die nicht-kontextsensitive Darstellung. Das heißt, dass die dargestellte Information unabhängig von der
Vorgeschichte ist, und sich nicht danach richtet, welche Informationen bereits abgefragt wurden.
2.2.5 Probleme bei Verweisen
Verweise haben sehr oft die Funktion eines Sprunges von einem Knoten zu einem
anderen, ohne eine direkte Rückkehrmöglichkeit zu bieten oder den Weg des Sprunges aufzuzeigen.
Studien haben gezeigt, dass Sprünge in Hypertextdokumenten mehr zur Verwirrung
des Benutzers beitragen als zum Verständnis [NIE89]. Eine Lösung ist die Verwendung von Pop-up Erklärungen, welche bei Anwählen des Verweises (oder fraglichen
Wortes) in den Vordergrund treten. Damit wird dem Benutzer die Möglichkeit geboten, zusätzliche Informationen über das Sprungziel zu bekommen. Eine weitere Lösungsmöglichkeit besteht darin, einen speziellen Teil der Benutzeroberfläche für
Verweiserläuterungen (bzw. zusätzliche Erklärungen) freizuhalten. Dies hat eine ähnliche Funktion wie die Fußnoten in konventionellen Texten.
Eine gewisse Entschärfung des Problems kann durch hierarchische Verweise geschaffen werden. Damit ist gemeint, dass es möglich ist, einige Verweise zurück bzw.
nach vorne zu gehen. In heutigen Browsern ist diese Funktion (vorwärts/rückwärts)
meistens standardmäßig implementiert.
2.2.6 Struktur eines Hypertextsystems
Bei der Struktur von Hypertextdokumenten gibt es angefangen bei der streng hierarchischen Struktur (rein linear oder baumorientiert), bis zur Vollvermaschung der Knoten alle Möglichkeiten. Das entscheidende Kriterium für die Auswahl der Struktur sollen jedoch nicht die technischen Möglichkeiten sein, sondern der menschliche Benutzer.
Menschliche Benutzer sind in der Lage, sich kurzfristig etwa 7 2 Einzelinformationen zu merken [MIL56]. Bezieht man diese relative geringe Merkfähigkeit des MenSeite 8
2 WWW-Anbindung
schen in die Betrachtung mit ein, so ergibt sich, dass ein Anwender niemals mehr als
5 Ebenen in einem Dokument vorfinden sollte. Durch diese relative geringe Anzahl
von Hierarchien (praktisch werden meist nur 3 Ebenen verwendet) hat der Benutzer
jederzeit den Überblick über die Gesamtstruktur des Dokumentes.
Ein weiteres wichtiges Kriterium bei der Auswahl der Struktur und der Verweise ist
eine schleifenfreie Gestaltung aller Komponenten. Das heißt, es soll nicht möglich
sein, dass der Benutzer durch die Verweise immer wieder die gleichen Knoten zu
sehen bekommt.
Aus den beiden oben genannten Punkten folgt auch, dass der Benutzer jederzeit die
Möglichkeit haben soll zu wissen, in welchem Bereich des Gesamtdokumentes er
sich gerade befindet.
2.2.7 Das Framing-Problem
Neben den Informationen welche durch das Dokument oder die Datenbank zur Verfügung gestellt werden, gibt es auch noch zahlreiche Zusatzinformationen aus externen Quellen. Diese externen Quellen werden entweder direkt in das eigene Dokument eingebunden oder es wird mit Verweisen auf diese Quellen gearbeitet. Hier
muss darauf geachtet werden, dass eine klar definierte Grenze zwischen den eigenen Informationen und den externen Informationen gezogen wird. Es stellt sich also
das Problem wie viele Informationen in das Dokument eingebunden werden und auf
wie viele Informationen extern verwiesen wird (wo die Grenze bzw. der Rahmen des
Dokumentes angesiedelt wird).
2.3 Architektur eines Hypertextsystems
Es gibt verschiedene Modelle für die Beschreibung von Hypertextsystemen. Ein relativ einfaches, aber dennoch ausreichendes Modell für das allgemeine Verständnis
soll hier beschrieben werden. Betrachtet man den Aufbau eines Hypertextsystems,
so kann man nach Campell und Goodman [FCIT98] drei verschiedene Schichten unterscheiden. Diese drei Schichten unterscheiden sich durch die Funktion und die
Repräsentation der Daten deutlich. Zuerst sollen die drei Schichten kurz erläutert
werden (Abb. 2.2).
Seite 9
2 WWW-Anbindung
2.3.1 Datenbasis Schicht
Dies ist die unterste Schicht des Modells und beschreibt die einzelnen Datenobjekte.
Alle im Hypertextsystem verwendeten Daten, also sowohl Knoten wie auch Verweise
und die zugehörigen Texte, Bilder, Animationen, Programme usw. liegen als einzelne
Datenobjekte vor. Hier kann auf bestehende Datenbanksysteme zurückgegriffen
werden, um die Daten sicher abzulegen und schnell aufzufinden. In dieser Schicht ist
noch nicht definiert wie die einzelnen Daten aufeinander einwirken.
2.3.2 HAM-Schicht5
Diese Schicht hat die Aufgabe, die Wechselwirkungen zwischen den Knoten sowie
die Verweise zu definieren. Hier können Daten auch in entsprechende Standardformate eingepasst werden, um die Verwendung unterschiedlicher Hypertextsysteme
zu ermöglichen. Damit wird allerdings noch nicht festgelegt, wie sich die Daten für
den Benutzer schlussendlich darstellen. Hier geht es nur um die Aufbereitung der
Datenobjekte in ein zusammenhängendes System von Informationen (Knoten).
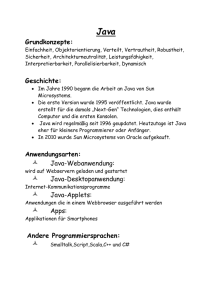
2.3.3 Präsentationsschicht
In der obersten Schicht des Modells findet
man die Definition des Userinterfaces. Es
wird also definiert, in welcher Form die
Daten dem Benutzer präsentiert werden.
Weiters entscheidet sich hier, welche
Möglichkeiten dem Benutzer zur Verfügung stehen, um die Daten zu betrachten.
Hier können auch, abhängig von der Art
des Benutzers, verschiedene Ansichten
definiert werden. So könnten Benutzer mit
Schreibrechten ausgestattet werden, um
Abb. 2.2. : Die drei Schichten des HAM
Modells
5
die Datenbasis zu ergänzen, während andere Benutzer nur die Möglichkeit haben,
auf die gespeicherten Daten lesend zuzugreifen. Auch eine Differenzierung der
Hypertext Abstract Machine
Seite 10
2 WWW-Anbindung
Benutzer anhand deren Kenntnis des Materials wäre denkbar. Damit könnten Einsteiger in das jeweilige Thema nur die wichtigsten Informationen präsentiert bekommen, während der fortgeschrittene Benutzer mit vielen zusätzlichen Informationen
versorgt werden könnte.
Hier können auch unterschiedliche Ansichten der Daten zur Auswahl stehen. Einige
Möglichkeiten wären :
•
Fenster
Alle Knoten werden in einem Fenster angezeigt durch welches man sich mit Cursor/Maus bewegen kann.
•
Mehrere Fenster
Die unterschiedlichen Knoten werden auch in unterschiedlichen Fenstern angezeigt. Damit ergeben sich gute Vergleichsmöglichkeiten zwischen unterschiedlichen Knoten für den Benutzer. Allerdings steigt die Komplexität der Datenpräsentation.
•
Fischaugensicht
Diese spezielle Art der Darstellung zeigt alle Informationen, die sich direkt an der
aktuell betrachteten Stelle des Dokumentes befinden (also direkt beim Benutzer),
aber nur Überblicke bei weiter entfernten Informationen. Man sieht also das aktuelle Kapitel ausführlich, während man von anderen Kapiteln beispielsweise nur
die Überschrift sehen würde.
Das Interface für die Datendarstellung sollte so weit wie möglich im gesamten Hypertextsystem gleich sein. Damit gibt man dem Anwender die Möglichkeit, sich an eine einheitliche Oberfläche zu gewöhnen und auf sämtliche Informationen mit der
gleichen Benutzeroberfläche zugreifen zu können.
Auch zusätzliche Funktionen, wie das Suchen im Dokument, das Ablegen von Verknüpfungen usw. werden hier definiert.
2.4 Designrichtlinien bei der Erstellung von
Hypertext Dokumenten
Aufgrund der zuvor besprochenen Grundlagen des Aufbaus von Hypertextdokumenten und den dabei auftretenden Schwierigkeiten, ergeben sich einige praktische
Richtlinien, wie solche Dokumente elektronisch realisiert werden können. Im folgenSeite 11
2 WWW-Anbindung
den die wichtigsten Richtlinien für ein möglichst effektives und für den Anwender gewinnbringendes Design.
Diese Designrichtlinien beziehen sich auf gängige Browser, welche derzeit (Mitte
1998) als Standardsoftware anzusehen sind. Unter der Größe „Bildschirm“ wird hier
eine darstellbare Seite auf einem Gerät verstanden, wobei im Folgenden von einer
Minimalgröße von 800x600 Pixel ausgegangen wird. Diese Minimalgröße dürfte einen Großteil aller verwendeten Geräte (inklusive Notebooks) abdecken.
2.4.1 Allgemeines
•
Definition des Gesamtinhaltes und der Dokumentenstruktur
Bevor mit der Erstellung des Dokumentes in elektronischer Form begonnen wird, soll
genau definiert werden, wie der Inhalt aussieht. Weiterhin soll definiert werden, wie
die Aufteilung der Informationen auf einzelne Seiten erfolgt und wie die Struktur des
Gesamtdokumentes aussieht.
•
Unterstützung unterschiedlicher Browser
Das gesamte Hypertextdokument soll so erstellt werden, dass es mit den gängigsten
Browsern ansprechend dargestellt werden kann. Dies erfordert eine Beschränkung
auf ein Subset der zur Verfügung stehenden Möglichkeiten. Die Verwendung von
proprietären Erweiterungen zu den Standards (HTML, HTTP) ist nicht zu empfehlen,
da die Darstellung auf anderen Browsern undefiniert ist.
•
Ausdruckbare Version bereitstellen
Um dem Anwender das aufwendige Kopieren und Zusammenfügen der einzelnen Informationsseiten zu ersparen, soll eine ausdruckbare Version des Gesamttextes sowie der einzelnen Kapitel zur Verfügung stehen. Diese sollte so weit wie möglich
auch in verschiedenen Formaten vorliegen (z.B. Postscript und pdf). Im speziellen
müssen Versionsunterschiede bzw. Betriebssystemunterschiede berücksichtigt werden (Zeilenumbrüche, Querverweise, usw.).
2.4.2 Definition der einzelnen Seiten
•
Titelseite nicht größer als ein Bildschirm
Dadurch erhält der Anwender sofort einen Überblick über das Angebot auf dieser
Seite, ohne weiterblättern zu müssen. Weiterhin sollte die Titelseite möglichst klar
und übersichtlich gestaltet sein, um eine schnelle Orientierung zu ermöglichen. Auch
die Verwendung aufwendig gestalteter Titelseiten sollte so weit wie möglich vermieSeite 12
2 WWW-Anbindung
den werden, um Benutzer mit langsameren Netzanbindungen (33.6 kbps) nicht unnötig lange Wartezeiten zuzumuten.
•
Informationsseiten (Knoten) nach Möglichkeit nicht größer als 2 bis 3 Bildschirme
Die einzelnen Informationsseiten sollten nicht größer als 2 bis 3 Bildschirme sein um
den Benutzer eine möglichst einfache Orientierung zu ermöglichen. Dadurch wird
verhindert, dass der Benutzer den Bezug zu davor- oder dahinterliegenden Seiten
verliert.
•
Erstellungsdaten auf jeder Seite
Jede einzelne Informationsseite soll Copyright, Autor, Erstellungsdatum und URL
enthalten. Die URL dient dazu ein späteres Aufsuchen einer Seite zu erleichtern, falls
die Seite nur als Ausdruck zur Verfügung steht.
•
Unterstützung einer Feedbackmöglichkeit
Der Anwender soll die Möglichkeit haben, zu einer Seite eigene Anregungen, Korrekturen oder Ergänzungen mitteilen zu können. Im einfachsten Fall lässt sich das durch
ein einfaches „mailto:“-tag erreichen, das direkt auf den Autor verweist. Diese Feedbackmöglichkeit soll durch den Anwender möglichst schnell und einfach erreichbar
sein, damit sie auch genutzt wird.
Seite 13
2 WWW-Anbindung
2.4.3 Grafiken
•
Nur notwendige Grafiken
Jede Grafik soll zur Verdeutlichung eines Sachverhaltes notwendig sein. Bei langsamen Verbindungen (z.B. über Modem) kann die Übertragungszeit durch Bilder
stark in Mitleidenschaft gezogen werden. Diese Wartezeiten veranlassen viele Benutzer, eine Hypertextseite wieder zu verlassen.
•
Möglichst kleine Grafiken mit wenigen Farben
Je kleiner eine dargestellte Grafik und je geringer die Farbanzahl ist, umso geringer
ist der Speicherbedarf und damit auch die Übertragungszeit. Eine Limitierung der
Größe einer Grafik hat außerdem den Vorteil, dass die Grafik vollständig auf einem
Bildschirm dargestellt werden kann.
•
Benutzen kleiner Bilder6 als Vorschau
Um den Platz einer Seite nicht übermäßig durch Grafiken auszulasten und um die
Ladezeiten von Hypertextseiten möglichst gering zu halten, können auch kleine „Vorschaubilder“ verwendet werden. Die vollständige Größe eines solchen Bildes wird
nur auf ausdrücklichen Wunsch des Benutzers geladen.
•
Benutzung von JPEG für Fotodarstellungen oder Bilder mit vielen Farben.
•
Benutzung von GIF für stark strukturierte Bilder mit wenigen Farben.
2.4.4 Text
•
Hoher Kontrast zwischen Text und Hintergrund
Um die Lesbarkeit des Textes für den Anwender zu erhöhen, sollte schwarzer Text
auf weißem Grund verwendet werden. Dies kommt auch den Lesegewohnheiten von
herkömmlichen Printmedien (Zeitungen, Zeitschriften) sehr nahe.
6
Diese verkleinerten Ausgaben von Bildern werden oft auch als thumbnails bezeichnet.
Seite 14
2 WWW-Anbindung
•
Möglichst wenig Spezialeffekte
Es sollten möglichst wenige Spezialeffekte (blinkender Text, verschiedenfarbiger
Text, bewegte Buchstaben,...) eingesetzt werden, um einen klar formatierten Text zu
erhalten. Auch die Schriftart sollte einheitlich gewählt werden. Hervorhebungen können durch „kursiv“ oder „fett“ formatierte Wörter vorgenommen werden. Unterstrichene Textpassagen sollten nicht zur Hervorhebung verwendet werden, da die Verwechslungsgefahr mit Verweisen hoch ist.
2.4.5 Verweise
•
Möglich aussagekräftige Wörter oder Textphrasen
Textpassagen, die als Verweise dienen, sollten möglichst klar darauf hinweisen, wohin der Verweis zeigt. Anstatt „Hier drücken um ein Beispiel einer Verteilungsfunktion
zu sehen“ sollte besser „Beispiel einer Verteilungsfunktion“ gewählt werden. Weiters
sollte vermieden werden, einzelne Ziffern oder Buchstaben als Verweise zu verwenden, da die Auswahl einigen Anwendern Schwierigkeiten bereiten kann.
•
Verweise zu externen Quellen regelmäßig überprüfen
Die Kontrolle der internen Verweise kann als selbstverständlich vorausgesetzt werden. Besonders bei Verweisen zu externen Quellen muss jedoch darauf geachtet
werden, dass in angemessenen Zeitabständen überprüft wird, ob der Verweis noch
gültig ist. Besonders in Umgebungen, die sich so schnell verändern wie das Internet,
können Verweise in relativ kurzer Zeit ungültig werden. Solche Verweise hinterlassen
beim Benutzer den Eindruck einer nicht aktuell gehaltenen Seite.
•
Navigationshilfen auf den einzelnen Seiten
Auf jeder Seite sollen Navigationshilfen vorhanden sein, um sich im Text zurück oder
vorwärts bewegen zu können. Auch ein Verweis auf die Titelseite oder den Kapitelbeginn stellt sich als sehr hilfreich dar. Obwohl diese Funktionen auch in den meisten
gängigen Browsern vorhanden sind, kann nie definiert werden, wie der Anwender auf
die jeweilige Seite gelangt ist und wie sich die Navigationshilfen des Browsers
verhalten. Im speziellen bei der Verwendung von Frames stellen sich die
Browserhilfen als ungeeignet heraus.
Seite 15
2 WWW-Anbindung
•
Zusatzinformationen für Verweise die Filetransfers betreffen.
Verweise, die einen Filetransfer initiieren, sollen immer einen Hinweis darauf enthalten um welche Art von Daten es sich handelt und wie groß das zu übertragende File
ist. Ein Beispiel wäre „Skriptum für Fehlertolerante Systeme (Word Dokument – 765
KByte)“
2.5 Einbindung des Skriptums „Fehlertolerante Systeme“
Nachdem die Eigenschaften eines Hypertextsystems kurz erklärt wurden, soll nun
eine Implementierung aufgezeigt werden. Es soll das Dokument „Fehlertolerante
Systeme“ als Hypertext System veröffentlicht werden.
2.5.1 Struktur
Zuerst ein Überblick über die Struktur des Dokumentes und die Aufteilung in einzelne
Knoten. Da ein Knoten möglichst zusammengehörige Informationen enthalten soll
und eine Größe von etwa 3-5 Bildschirmen nicht überschreiten soll, wird jedes Unterkapitel als ein Knoten betrachtet.
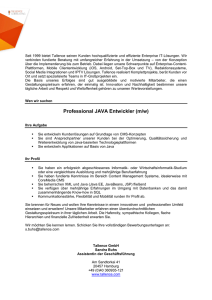
Inhaltsverzeichnis
Informationen
Erklärungen
Abb. 2.3. : Unterteilung des Bildschirms
Von jedem Knoten gibt es einerseits Verweise zu Fußnoten und Abkürzungen sowie
zu den wichtigsten anderen Knoten. Am Ende jedes Knotens, also jedes Unterkapitels gibt es Verweise zum vorhergehenden Kapitel, zum nachfolgenden Kapitel und
zum Inhaltsverzeichnis. Damit wird sichergestellt, dass man jederzeit die lineare Abfolge der Kapitel nachvollziehen kann.
Seite 16
2 WWW-Anbindung
Bei der Verwendung von Bildern, Animationen oder sonstigen Programmen, werden
diese nur als Verweis (auch als Icon) dargestellt und erst bei Aktivierung dieses Verweises wird das jeweilige Objekt geladen. Damit wird eine Überfrachtung des Bildschirms vermieden und eine klarere Struktur eingehalten.
2.5.2 Bildschirmaufbau
Nun zum Bildschirmaufbau des Hypertextsystems. Der Bildschirm wird in drei unterschiedliche Bereiche unterteilt:
•
Inhaltsverzeichnis
Hier wird ein linear strukturiertes Inhaltsverzeichnis angezeigt, welches auf jedes
Kapitel einen Verweis hat. Damit kann man schnell und unkompliziert in jeden beliebigen Teil des Dokumentes verzweigen.
•
Informationen
Dies ist der Hauptbildschirm für die Darstellung des Fließtextes, der Bilder, Rechenbeispiele usw. Dieser Teil soll auch farblich von den beiden anderen Teilen
abgehoben sein, um seine Bedeutung hervorzuheben.
•
Erklärungen
Bei den Erklärungen findet man kurze Erläuterungen zu besonderen Begriffen,
Fußnoten und eventuell auch Literaturhinweise sowie externe Quellen. Durch das
Ablegen in einem gesonderten Bereich wird die Darstellung der Information nicht
beeinflusst.
2.5.3 Drucktext
Das gesamte Dokument wird als Wordfile zur Verfügung gestellt, um dem Benutzer
auch das Laden und Ausdrucken des Dokumentes zu ermöglichen. Weiters wird jedes einzelne Kapitel ebenfalls als eigenes Dokument zur Verfügung gestellt, falls ein
Benutzer nur an einem Teilbereich des Dokuments interessiert ist.
Seite 17
2 WWW-Anbindung
2.5.4 Grafiken
Grafiken werden hauptsächlich im GIF-Format abgespeichert, da dies für Diagramme
eine sehr gute Komprimierung ergibt. Sollten umfangreichere Diagramme notwendig
sein, dann werden im Dokument nur Verweise darauf abgelegt, welche bei Bedarf
verwendet werden können.
Abb. 2.4. : Beispielausdruck eines möglichen Bildaufbaus
Seite 18
2 WWW-Anbindung
Seite 19
3 Verteilungsfunktionen
3 Verteilungsfunktionen
Am Beginn des Skriptums wird der Unterschied zwischen der klassischen und der axiomatischen Wahrscheinlichkeitsrechnung erläutert. Im Grunde ist es selbstverständlich, dass ideale Systeme der klassischen Wahrscheinlichkeitsrechnung, wie
das Würfelspiel oder die Spielkarten, nicht ausreichend für die Beschreibung realer
Prozesse in der Elektrotechnik sind. Im folgenden stellt sich daher die Aufgabe, die
Berechnungsmethoden von Wahrscheinlichkeiten des axiomatischen Modells aufzubereiten, um auch nicht ideale Prozesse beschreiben zu können.
3.1 Zufallsgrößen, Dichte- und Verteilungsfunktionen
Während in den vorigen Kapiteln eine Zufallsgröße etwa die Wahl einer Karte beim
Kartenspiel oder die Augenzahl des Würfels darstellte, handelt es sich jetzt bei Zufallsgrößen um
die Lebensdauer eines Systems
die „exakte“ Größe von Bauteilen
Zuerst wollen wir eine Merkmalsmenge M festlegen, welche die einzelnen Elementarereignisse enthält. Bildet man
eine solche Menge M durch
Aufzählung, so ist es gleichgültig wie die einzelnen Elemente angeordnet werden.
Damit gilt also für die einzelnen Elemente
{e1,e2,e3} = {e3,e1,e2}
Jedem dieser Elementarelemente ei aus der Merkmalsmenge M wird nun eine Zahl
e
e
e
e
X(e1) X(e2)
e
X(e3)
X(e4)
X(e5)
Abb. 3.1 : Definition der Zufallsvariablen
Seite 20
3 Verteilungsfunktionen
zugeordnet. Diese Zuordnung (=Funktion) wird Zufallsgröße7 genannt (Abb. 3.1).
Diese Funktion ist also eindeutig definiert und keineswegs zufällig, wie der Begriff
Zufallsgröße vermuten lassen könnte. Zufällig ist nur das Experiment selbst. Ab nun
werden Zufallsgrößen mit großen Buchstaben, also X(e), geschrieben und jene Werte die sie annehmen mit Kleinbuchstaben, also x i.
Damit lässt sich direkt formulieren :
X ( e) ≤ ∞
X ( e) ≤ −∞
≡
≡
M
= vollständige Merkmalsmenge
0
= Nullmenge
Weiterhin können Zufallsgrößen diskret oder stetig sein.
Eine Zufallsgröße heißt dann diskret, wenn sie nur abzählbar viele Werte annehmen
kann .
Eine Zufallsgröße heißt dann stetig, wenn sie innerhalb eines Intervalls jeden reellen
Zahlenwert annehmen kann. Der Unterschied der beiden Zufallsgrößen lässt sich in
Abb. 3.2 und Abb. 3.3 sehr deutlich ausmachen :
F(x)
F(x)
1.
1.
0.
0.
0
1
2
x
3
Abb. 3.2 : Funktion einer diskreten Zufallsvariablen
Abb. 3.3 : Funktion einer stetigen Zufallsvariablen
Die Wahrscheinlichkeit für die Untermenge A einer Merkmalsmenge M kann nach
7
Anstatt des Begriffes Zufallsgröße findet man auch die Begriffe Zufallsvariable oder
stochastische Variable
Seite 21
3 Verteilungsfunktionen
P ( A) =
P (ei )
ei∈M
berechnet werden. Analog dazu kann man die Wahrscheinlichkeit definieren, dass
X(e) ∈ [a,b] ist. Mit der Normierungsbedingung
∞
f ( x )dx = 1
−∞
gilt
b
( Gl. 3.1 )
P (a < X (e) ≤ b) = f ( x )dx
a
Die Funktion f(x) wird im folgenden als Dichtefunktion8 bezeichnet, welche nicht unbedingt eine kontinuierliche Funktion sein muss, wie das Integral in ( Gl. 3.1 vermuten lassen könnte. Speziell bei diskreten Verteilungen ist f(x) nicht kontinuierlich.
Betrachtet man weiters jene Wahrscheinlichkeit P(X(e) ≤ x) dafür, dass die Zufallsgröße Werte annimmt, die kleiner oder gleich x sind, so erhält man die Verteilungsfunktion9 F(x) einer diskreten Zufallsvariable
F ( x ) = P ( X ( e) ≤ x ) =
f ( xi )
xi ≤ x
Analog dazu gilt für eine stetige Zufallsgröße X(e) die Beziehung
F ( x) =
x
f (t ) ⋅ dt
−∞
falls f(t) eine nichtnegative Funktion ist.
8
Es werden auch die Begriffe Wahrscheinlichkeitsdichtefunktion oder Dichte der Zufallsvariablen verwendet.
9
Auch Summenfunktion, Verteilungsfunktion der Zufallsgröße oder Wahrscheinlichkeitsverteilungsfunktion genannt
Seite 22
3 Verteilungsfunktionen
Daraus folgt :
F (−∞) = 0, F ( x) ≥ 0, F (∞) = 1
Je nach Art der Merkmalsmenge können die Dichtefunktion und die Verteilungsfunktion kontinuierliche oder diskrete Funktionen sein. Für diskrete Werte der Zufallsgröße ist die Verteilungsfunktion unstetig. Im Falle einer stetigen Zufallsgröße hat die
Verteilungsfunktion keine Sprungstellen, kann aber Knickstellen aufweisen, in denen
die Verteilungsfunktion nicht differenzierbar ist.
Zusammenfassend lässt sich also sagen :
•
Die Verteilungsfunktion F(x) gibt an, mit welcher Wahrscheinlichkeit die Zufallsgröße X(e) sich im Intervall ]-∞,x] befindet.
•
Die Dichtefunktion f(x) gibt jene Wahrscheinlichkeit an, mit welcher die Zufallsgröße X(e) den Wert x annimmt.
•
Die sich bei einem Zufallsexperiment durch die Zufallsvariable X(e) ergebenden
Experimentalergebnisse lassen sich über f(x) und F(x) beschreiben.
Es lassen sich prinzipiell beliebig viele Dichtefunktionen angeben, allerdings gibt es
ganz bestimmte Modellverteilungen, die für unsere Zwecke der Zuverlässigkeitsbetrachtungen besonders geeignet sind. Deren Charakteristika werden durch zusätzliche statistische Maßzahlen festgelegt, wie z.B. Mittelwert und Varianz.
Bevor auf diese charakteristischen Kenngrößen eingegangen wird, noch ein Beispiel
um das
Verständnis zu vertiefen.
Beispiel 3.1 :
Wie sieht die Dichte- und Verteilungsfunktion für ein Würfelexperiment mit 2 Würfeln
aus ?
Es soll die Dichtefunktion sowie die Verteilungsfunktion grafisch dargestellt werden.
Seite 23
3 Verteilungsfunktionen
Lösung 3.1 :
F(x)
1.0
1/36
2
3
4
5
6
7
8
9 10 11 12
Abb. 3.4 : Verteilungsfunktion des Würfelexperimentes
x
Während eine Würfelsumme von zwei oder
zwölf nur dann auftritt
wenn beide Würfel eins
oder 6 ergeben (nur eine
Möglichkeit von 36), tritt
eine Würfelsumme von 3
oder 11 bereits bei zwei
möglichen Kombinationen auf ( 1-2 und 2-1
bzw. 5-6 und 6-5). Eine
Würfelsumme von 4 oder
10 kann durch 3 verschiedene Kombinationen erreicht werden (1-3,
3-1, 2-2 oder 6-4, 4-6, 55). Daraus ergibt sich
die diskrete, dreieckförmige Dichtefunktion in
Abb. 3.5 und eine Verteilungsfunktion
nach
Abb. 3.4.
f(x)
6/36
1/36
2
3
4
5
6
7
8
9 10 11 12
Abb. 3.5 : Dichtefunktion für das Würfelexperiment
Seite 24
3 Verteilungsfunktionen
3.2 Parameter einer Verteilung
Eine stetige Zufallsvariable lässt sich durch ihre Dichtefunktion f(x) und ihre Verteilungsfunktion F(x) eindeutig angeben. Es gibt jedoch einige Klassen von Funktionen, die in der
Praxis sehr häufig eingesetzt werden und eine typische Verläufe für f(x) bzw. F(x) aufweisen.
Um diese Funktionen zu charakterisieren, muss nicht die Funktionsgleichung angegeben werden, sondern es genügt, den Typ der Funktion und deren Parameter anzugeben.
Einige dieser oft verwendeten Funktionsgleichungen werden im folgenden dargestellt, und die charakteristischen Parameter werden genauer betrachtet.
3.2.1 Erwartungswert
Als erste charakteristische Kenngröße für eine Verteilung wollen wir uns den Erwartungswert ansehen. Anschaulich kann man sich den Erwartungswert als mittleren
Wert der Realisationen der Zufallsgröße vorstellen.
Man versteht also unter dem Erwartungswert E(X) einer Zufallsgröße X
E( X ) =
∞
x ⋅ f ( x) ⋅ dx 10
−∞
Im Falle einer diskreten Zufallsgröße vereinfacht sich das Integral zu einer Summe
und man erhält
E( X ) =
xi ⋅ f ( xi)
i
Bei einer symmetrischen Dichtefunktion ergibt sich daraus, dass der Mittelwert gleich dem
Symmetriepunkt ist. Die Ergebnisse eines Zufallsversuches pendeln also um diesen Erwartungswert.
10
∞
Unter der Voraussetzung, dass
| x | ⋅ f ( x) ⋅ dx < ∞
−∞
Seite 25
3 Verteilungsfunktionen
Beispiel 3.2 :
Betrachtet man das 2-Würfelexperiment, sieht man bereits aus dem symmetrischen
Verlauf, dass der Erwartungswert 7 sein wird.
Lösung 3.2 :
Die genaue Berechnung
E ( x) = 2 ⋅
1
2
3
2
1
+ 3⋅
+ 4⋅
+ ...... + 11 ⋅
+ 12 ⋅
=7
36
36
36
36
36
zeigt die Richtigkeit dieser Annahme.
3.2.2 Standardabweichung und Varianz
Der Erwartungswert gibt zwar an, um welche Werte die Ergebnisse der Zufallsvariable abweichen, aber nicht wie weit die Werte streuen. Einfach den Erwartungswert der
Abweichung zu bilden, führt zu keinem Ergebnis, da eine solche Abweichung Null
ergibt. Um dennoch einen aussagekräftigen Wert zu erhalten, bildet man die durchschnittliche quadratische Abweichung der Zufallsgröße X von ihrem Erwartungswert.
Der Mittelwert µ einer Zufallsgröße X ist gleich dem Erwartungswert der Zufallsgröße
µ = E( X )
Betrachtet man den Erwartungswert des Quadrates der Abweichung vom Mittelwert,
so erhält man die Varianz σ2 (11), also den gesuchten Parameter zur Beschreibung
der Abweichung vom Mittelwert, zu
σ 2 = E [( X − µ ) 2 ]
Daraus folgt für diskrete Zufallsvariable
σ2 =
( xi − µ )2 ⋅ P( X = xi)
i
und für stetige Zufallsvariable
11
Es wird auch die Bezeichnung Var(X) verwendet.
Seite 26
3 Verteilungsfunktionen
+∞
σ 2 = ( x − µ ) 2 ⋅ f ( x) ⋅dx
−∞
Die Quadratwurzel aus der Varianz
σ = E [( X − µ ) 2 ]
bezeichnet man auch als Standardabweichung.
Zur einfacheren Berechnung der Varianz einer Zufallsgröße kann der Verschiebungssatz12 angewendet werden :
σ 2 = E(X 2 ) − µ 2
xi ⋅ f ( xi ) = µ
Mit
und
i
( xi − µ ) 2 ⋅ f ( xi ) =
i
i
f ( xi ) = 1 erhält man
( xi 2 − 2 µxi + µ 2 ) ⋅ f ( xi ) =
i
xi 2 ⋅ f ( xi ) − 2 µ
=
i
xi ⋅ f ( xi ) + µ 2
i
xi 2 ⋅ f ( xi) − 2µ 2 + µ 2 =
=
i
f ( xi ) =
i
xi 2 ⋅ f ( xi) − µ 2
i
und damit den Beweis des Verschiebungssatzes.
Beispiel 3.3 :
Bei der Berechnung der Varianz für das 2-Würfelexperiment soll nun der Verschiebungssatz eingesetzt werden.
Lösung 3.3 :
Zuerst erfolgt die Berechnung für E(X2) :
E( X 2 ) = 2 2 ⋅
1
2
1
+ 32 ⋅
+ .... + 12 2 ⋅
= 54.8
36
36
36
Danach kann die Varianz berechnet werden zu
σ 2 = E ( X 2) − µ x2 = 54.8 − 7 2 = 5.8
12
Auch als Satz von Steiner bezeichnet
Seite 27
3 Verteilungsfunktionen
und die Standardabweichung zu
σ = 5.8 = 2.4
Teilweise benötigt man auch eine normierte Verteilungsfunktion, das heißt, der Erwartungswert soll zu Null werden und die Standardabweichung soll den Wert eins
annehmen. Dazu wird eine Normierungstransformation durchgeführt, welche eine
neue Zufallsvariable Z liefert, die der normierten Funktion zugehörig ist.
Z=
X −µ
σ
Damit gilt dann :
E(Z)=0 und
2
(Z)=1.
3.2.3 Momente
Führt man eine Verallgemeinerung des Erwartungswertes durch, so kommt man zu
Momenten k-ter Ordnung. Diese Momente k-ter Ordnung sehen für diskrete Funktionen folgendermaßen aus :
Mk = E[( x − x 0) k ] =
( x − x 0) k ⋅ P ( X = xi )
i
Für stetige Funktionen ergibt sich :
+∞
Mk = E[( x − x 0) k ] = ( x − x 0) k ⋅ f ( x) ⋅ dx
−∞
Man kann sich nun ansehen, wie diese allgemeinen Definitionen auch den Erwartungswert und die Varianz als zwei Spezialfälle enthalten. Wenn x 0 gleich Null ist und
k den Wert eins hat, so erhält man den Erwartungswert. Somit entspricht der Erwartungswert einem Moment erster Ordnung. Wenn hingegen x0 gleich dem Erwartungswert gesetzt wird und k den Wert zwei hat, so erhält man die Varianz, welche
damit ein Moment zweiter Ordnung ist.
Weiterhin spricht man noch von sogenannten Nullmomenten und Zentralmomenten.
Nullmomente bezeichnet man alle Momente, bei denen x 0 gleich null ist, also im Ko-
Seite 28
3 Verteilungsfunktionen
ordinatenursprung liegt. Wird x0 gleich dem Erwartungswert gesetzt, dann spricht
man von Zentralmomenten.
Daraus folgt, dass der Erwartungswert gleich ein Nullmoment erster Ordnung ist und
die Varianz ein Zentralmoment zweiter Ordnung.
Wie man bereits bei der Definition der Varianz gesehen hat, ist das Zentralmoment
erster Ordnung immer gleich null.
Weiterhin werden noch Zentralmomente höherer Ordnung verwendet. Das Zentralmoment dritter Ordnung gibt die Asymmetrie einer Verteilung an und wird deshalb
auch als Schiefe bezeichnet. Das Zentralmoment vierter Ordnung gibt an, wie stark
sich die Wölbung von der Normalverteilung unterscheidet, und wird auch als Exzess
bezeichnet.
Zur Erleichterung des Verständnisses noch ein Beispiel.
Beispiel 3.4 :
[BASL84] Bei einer Tombola werden 1000 Lose verkauft und folgende Gewinne verlost (wobei jedes Los nur einmal gewinnen kann) :
1 Gewinn zu
10 Gewinne zu
10 Gewinne zu
400 S
100 S
10 S
Zuerst berechne man den Erwartungswert und die Streuung der Gewinnhöhe, die auf
ein Los entfällt.
Weiterhin berechne man, zu welchem Preis die Lose verkauft werden müssten, wenn
nur 50% der Einnahmen als Gewinne verteilt werden sollen.
Lösung 3.4 :
Die möglichen Werte der Zufallsgröße sind x1=400, x2=100, x3=10 und x4=0 mit den
zugehörigen Wahrscheinlichkeiten W(X=x 1)=0.001, W(X=x2)=0.01, W(X=x 3)=0.01
und W(X=x4)=0.979.
Damit ergibt sich der Erwartungswert zu:
E[ X ] = µ =
xi ⋅ P( X = xi) = 400 ⋅ 0.001 + 100 ⋅ 0.01 + 10 ⋅ 0.01 = 1.5S
i
Daraus folgt auch sofort der notwendige Verkaufspreis der Lose. Da pro Los im Mittel
1.5 S ausgeschüttet werden, muss der Verkaufspreis doppelt so hoch sein, also 3 S.
Seite 29
3 Verteilungsfunktionen
Bei der Berechnung der Varianz kann der Verschiebungssatz eingesetzt werden, und
es ergibt sich:
E[( X − µ ) 2 ] = E ( X 2 ) − µ 2 = 400 2 ⋅ 0.001 + 100 2 ⋅ 0.01 + 10 2 ⋅ 0.01 − 1.5 2 = 258.75
Seite 30
3 Verteilungsfunktionen
Seite 31
3 Verteilungsfunktionen
3.3 Diskrete Verteilungen
Hier werden Verteilungsfunktionen behandelt, deren Zufallsgröße nur endlich viele
oder abzählbar unendlich viele reelle Zahlen x 1,x2,... annehmen kann.
3.3.1 Zweistufige Grundgesamtheit und Urnenmodell
Es handelt sich um eine Grundgesamtheit mit zwei Klassen von Elementen. Die eine
Klasse enthält M Elemente mit der Eigenschaft A, während die andere Klasse N-M
Elemente enthält welche die Eigenschaft A nicht haben. Man kann also die Wahrscheinlichkeit P(A)=p und die Wahrscheinlichkeit P( A)=1-p=q für die beiden Klassen angeben. Anschaulich kann man sich das mit weißen und schwarzen Kugeln in
einer Urne vorstellen. Insgesamt gibt es N Kugeln. Davon haben M die Eigenschaft A
(sie sind schwarz) und N-M nicht die Eigenschaft A (sie sind nicht schwarz). Aus der
Urne sollen nun zufällig Kugeln entnommen werden.
Es lassen sich zwei Fälle unterscheiden. Im ersten Fall werden die gezogenen Elemente wieder zurückgelegt und es ergibt sich eine Binomialverteilung. Im zweiten
Fall werden die gezogenen Elemente nicht wieder in die Ursprungsmenge zurückgelegt und es ergibt sich eine hypergeometrische Verteilung.
3.3.2 Binomialverteilung
Bei einem Versuch sind nur die beiden Ereignisse A und A möglich. Die Wahrscheinlichkeit für das Ereignis A sei P(A)=p, und für das Ereignis A sei die Wahrscheinlichkeit P( A)=1-p=q. Die Summe von P(A) und P( A) muss offensichtlich
P = p + q =1
ergeben.
Bei zwei Versuchen setzt sich die Summe aus drei Anteilen zusammen. Und zwar
aus
P(A A)
P(A A)
P( A A)
= P( A A)
= P(A) P(A)
= P(A) P( A)
= P( A) P( A)
= p2,
= p.q
= q2.
und
Daraus folgt für die Summe
P = 1 = p 2 + 2 ⋅ p ⋅ q + q 2 = ( p + q) 2
Gl. 3.2
Seite 32
3 Verteilungsfunktionen
Der Faktor zwei in Gl. 3.2 kommt es den beiden Möglichkeiten, dass zuerst das Ereignis A eintrifft und danach das Ereignis ¬A oder umgekehrt. Betrachtet man dies
nun weiterhin für drei Versuche, so ergeben sich folgende Anteile :
P(A A A)
P( A A A) = P(A A A)= P(A A A)
P( A A A) = P(A A A) = P( A A
P( A A A)
= p3,
= p2q,
A) = pq2,
= q3
Daraus folgt für die Summe bei drei Versuchen:
P = 1 = p 3 + 3 ⋅ p 2 ⋅ q + 3 ⋅ p ⋅ q 2 + q 3 = ( p + q) 3
Verfolgt man diesen Weg weiter und nimmt allgemein n Versuche, so zeigt sich, dass
die Summe von P folgendes ergibt
n
n!
wobei der Faktor
=
als Binomialkoeffizient bezeichnet wird.
i
i! ⋅ (n − i )!
P = 1 = ( p + q ) n das sich auch als
P=
n
i=0
n
⋅ p n− i ⋅ q i darstellen läßt,
i
Mit diesem Binomialkoeffizienten kann übrigens auch das Pascalsche Dreieck berechnet werden.
r (i ) =
n
⋅ p n −i ⋅ q i
i
Die Summanden in dieser Gleichung r(i) geben die Wahrscheinlichkeitsdichtefunktion
an, mit der bei n Versuchen das Ereignis A genau i mal eintritt. Die Gesamtsumme
aller r(i) gibt dann die Wahrscheinlichkeitsverteilung an.
Beispiel 3.5 :
In einem Büro arbeiten 10 Rechner, bei denen die Wahrscheinlichkeit, dass sie ausfallen, P(A)=0.1 beträgt. Wie groß ist die Wahrscheinlichkeit, dass eine bestimmte
Anzahl von Rechnern einsatzbereit ist?
Lösung 3.5 :
Das Ergebnis lässt sich aus der Betrachtung der Dichtefunktion und der Verteilungsfunktion herauslesen.
Seite 33
3 Verteilungsfunktionen
Die Dichtefunktion sagt aus, dass die Wahrscheinlichkeit, dass kein System ausgefallen ist, etwa 35% beträgt. Die Wahrscheinlichkeit, dass genau ein System ausgefallen ist, beträgt hingegen beinahe 40%, ist also größer. Die genaue Berechnung
der Wahrscheinlichkeiten ergibt:
r (i = 0) =
10
⋅ 0.10 ⋅ (1 − 0.1)10−0 = 1 ⋅ 1 ⋅ 0.910 = 0.349
0
r (i = 1) =
10
⋅ 0.11 ⋅ (1 − 0.1)10−1 = 10 ⋅ 0.1 ⋅ 0.9 9 = 0.387
1
34.9%
38.7%
Die Verteilungsfunktion gibt darüber Auskunft, wie groß die Wahrscheinlichkeit ist,
dass höchstens eine bestimmte Anzahl von Rechnern ausgefallen ist. Der Verlauf
der Verteilungsfunktion zeigt deutlich, dass die Wahrscheinlichkeit, dass höchstens 3
Rechner ausgefallen sind, bereits sehr hoch ist. Im Normalfall kann also damit gerechnet werden, dass zumindest 7 Rechner im Einsatz sind.
0.5
1
0.4
0.3
0.5
0.2
0.1
0.05
0.01
0.1
0
1
2
3
4
5
6
7
8
9
10
Abb. 3.6 : Dichtefunktion
0
1
2
3
4
5
6
Abb. 3.7 : Verteilungsfunktion
Seite 34
7
8
9
10
3 Verteilungsfunktionen
3.3.3 Hypergeometrische Verteilung
Auch hier liegt eine zweistufige Grundgesamtheit vor, mit M Elementen der Klasse A,
und N-M Elementen welche die Eigenschaft A nicht haben. Im Unterschied zur Binomialverteilung werden gezogene Proben jedoch nicht wieder in die Ausgangsmenge zurückgelegt. Die Wahrscheinlichkeit, dass sich unter n gezogenen Proben k finden, die das Merkmal A haben, beträgt:
M
P ( X = k ) = r (i ) =
k
⋅
N −M
n−k
N
n
Die hypergeometrische Verteilung wird auch oft nur kurz als H(N;n;p) bezeichnet,
wobei p=M/N ist.
3.3.4 Poissonverteilung
Die Verteilung einer diskreten Zufallsvariablen X sieht bei der Poissonverteilung folgendermaßen aus:
P( X = k ) =
λk
k!
⋅ e −λ
Die Poissonverteilung, auch Po( ) abgekürzt, hat als einzigen Parameter . Die Poissonverteilung kann auch als Näherung für die Binomialverteilung verwendet werden,
wenn ein Grenzübergang n
und p 0 durchgeführt wird, bei dem n p=konst.=
bleibt.
Im Allgemeinen ist es bei der Annäherung ausreichend wenn p 0.08 und n 1500p
ist. Der Vorteil der Annäherung der Binomialverteilung liegt darin, dass die Poissonverteilung einfacher berechnet werden kann.
Zum Abschluss der diskreten Verteilungsfunktionen noch ein Beispiel zur Verständlichkeit.
Seite 35
3 Verteilungsfunktionen
Beispiel 3.6 :
[BASL84] Aus einer Grundgesamtheit von N=100 Elementen, von denen M=30 Elemente durch eine Eigenschaft A ausgezeichnet sind, wird eine Stichprobe vom Umfang n=5 gezogen.
Es soll sowohl der Fall
•
•
mit zurücklegen als auch
ohne zurücklegen betrachtet werden
Es soll auch eine Poissonverteilung betrachtet werden, die als Näherung verwendet
werden kann.
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
Lösung 3.6 :
0
1
2
3
4
Vergleicht man die hypergeometrische Verteilung mit der
Binomialverteilung, sieht man,
dass eine Approximation vorgenommen kann. Eine Faustregel für die Approximation der
Binomialverteilung durch die
hypergeometrische Verteilung
lautet:
n < 0.1*N
5
Abb. 3.8 : Hypergeometrische Verteilung
H(100;5;0.3)
Obwohl die Bedingungen für die Annäherungen der Binomialverteilung durch die
Poissonverteilung hier noch nicht erfüllt sind, kann man deutlich die Approximationsmöglichkeit sehen. Diese Approximation kann bei umfangreichen Berechnungen
sehr hilfreich sein.
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Abb.
1
3.10
2
:
3
4
5
0
1
Abb.
Binomialverteilung
Bi(5;0.1)
Seite 36
2
3.9
3
:
4
5
Poissonverteilung
Po(1.5)
3 Verteilungsfunktionen
Seite 37
3 Verteilungsfunktionen
3.4 Stetige Verteilungen
Es werden nun einige typische Verteilungsfunktionen vorgestellt, die bei der Betrachtung von fehlertoleranten Systemen von Bedeutung sind. Es werden jeweils die Dichtefunktion f(x) und die Verteilungsfunktion F(x) dargestellt.
3.4.1 Linearverteilung
Die Linearverteilung hat eine konstante Dichtefunktion und dementsprechend eine
linear ansteigende Verteilungsfunktion. Die Linearverteilung kann auch als ein Spezialfall der Rechteckverteilung betrachtet werden, welche zusätzliche Parameter zur
Verfügung stellt, um die Funktion einzugrenzen.
Damit können Systeme beschrieben werden, welche eine konstante Ausfalldichte
haben, d.h. pro Zeiteinheit fallen gleich viele Einheiten aus. Die Ausfallwahrscheinlichkeit nimmt dadurch stetig zu.
3.4.2 Rechteckverteilung13
Alle Werte welche innerhalb einer Intervalls a < x < b haben die gleiche Wahrscheinlichkeit.
Dichtefunktion :
f ( x) =
1
b−a
für a < x < b
f ( x) = 0 für x < a und x > b
Verteilungsfunktion :
F ( x) =
1
⋅x
b−a
für a < x < b
F ( x ) = 0 für x < a
F ( x) = 1 für x > b
13
Gleichverteilung
Seite 38
3 Verteilungsfunktionen
f x
F x
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
1
2
3
Abb.
3.11
:
Rechteckverteilung
4
Dichtefunktion
5
x
der
1
2
3
4
5
Abb. 3.12 : Verteilungsfunktion der
Rechteckverteilung
Verwendet man die Rechteckverteilung für Zuverlässigkeitsbetrachtungen, dann beginnen Einheiten ab einem Zeitpunkt a auszufallen. Es fallen pro Zeiteinheit jeweils
gleich viele Einheiten aus, wodurch die Verteilungsfunktion gleichmäßig zunimmt. Zu
einem bestimmten Zeitpunkt b sind alle Einheiten ausgefallen.
3.4.3 Normalverteilung14
Die Normalverteilung wird zunächst eingeführt als ein mathematisch zulässiges Verteilungsgesetz. Inwieweit diese Verteilung auch praktisch angewendet werden kann,
lässt sich erst nachträglich betrachten. Die Normalverteilung wird in Zusammenhang
gebracht mit der additiven Überlagerung einer großen Anzahl voneinander unabhängiger Einflüsse.
Dichte:
( x −µ )
−
1
2
f ( x) =
⋅ e 2⋅σ
σ ⋅ 2 ⋅π
2
Verteilung :
y
2
(t −µ )
−
1
2
⋅ e 2⋅σ ⋅ dt
F ( x) =
σ ⋅ 2 ⋅ π −∞
14
Wird auch als Gauß-Verteilung bezeichnet
Seite 39
x
3 Verteilungsfunktionen
Zuerst muss betrachtet werden, ob diese Funktion auch tatsächlich ein mathematisch zulässiges Verteilungsgesetz beschreibt. Für jede reelle Zahl muss f(t) 0 sein.
Diese Bedingung ist offensichtlich erfüllt. Weiterhin muss der Flächeninhalt unter der
Funktion f(x) im Bereich von - bis gleich 1 sein.
Die Normalverteilung hat zur Charakterisierung zwei Kennwerte, die den Verlauf vollständig beschreiben. Dies ist einerseits der Erwartungswert , bei welchem das Maximum der Funktion auftritt, und andererseits die Streuung , welche die „Breite“ der
Funktion angibt. In der Abbildung sieht man den Einfluss dieser beiden Parameter
auf die Funktion.
f x
F x
1.4
1.2
1.4
3
1.2
1
0.3
0.8
0.8
0.6
0.6
0.4
1
2
3
4
0.3
1
0.4
1
0.2
3
1
0.2
5
6
x
Abb. 3.13 : Dichtefunktion der Normalverteilung
1
2
3
4
5
6
x
Abb. 3.14 : Verteilungsfunktion der Normalverteilung
Wenn die Normalverteilung für Zuverlässigkeitsbetrachtungen verwendet wird, ist es
meistens unangenehm, dass die Funktion auch negative Werte annehmen kann.
Damit die negativen Werte ausgeschaltet werden, muss
0
f ( x) ⋅ dx ≈ 0
gelten, was durch >> erreicht werden kann.
−∞
Aufgrund des speziellen Kurvenverlaufes kann diese Verteilung für Verschleißausfälle vorteilhaft eingesetzt werden.
Beispiel 3.7 :
[BASL84] Mit einer Abfüllmaschine werden x 1 Gramm eines Produktes in x 2 Gramm
schwere Dosen gefüllt. 100 gefüllte Dosen werden in eine x 3 Gramm schwere Kiste
verpackt. Es seien x1, x 2 und x3 unabhängig und ausreichend genau nach den Normalverteilungen N(155;42), N(45;32) und N(1000;202) verteilte zufällige Variable.
Seite 40
3 Verteilungsfunktionen
•
Bestimme den Erwartungswert und die Streuung des Gewichtes einer aus der
Produktion zufällig herausgegriffenen, gefüllten Dose.
•
Berechne P(x1+x2
•
Berechne den Erwartungswert und die Streuung des Gewichtes einer zufällig aus
der Produktion herausgegriffenen, gefüllten Kiste. Nach welcher Verteilungsfunktion ist dieses Gewicht verteilt ?
215)
Lösung 3.7 :
Zu 1. : Gewicht einer gefüllten Dose : x=x1+x 2
E[x]=E[x1+x 2]=E[x 1]+E[x 2]=155+45=200g
Aufgrund der vorausgesetzten Unabhängigkeit von x1 und x2 setzt sich die Varianz
additiv aus den beiden Varianzen zusammen.
2
=E[(x-200)2]=42+32=25
=5g
Zu 2. : Eine Summe aus normalverteilten und unabhängigen zufälligen Variablen ist
wieder normalverteilt.
W(x 1+x2
215) = ((215-200)/5) = 0.9987
Hier wurde auf eine Tabelle der normierten Normalverteilung zurückgegriffen, welche
in Tabellenbüchern zu finden ist (z.B. [BRON97]). Aus dieser Tabelle lässt sich ablesen, dass Φ(3)=0.9987 ist. Die Normierung der Verteilungsfunktion erfolgte nach Gl.
3.3.
Zu 3.: Bezeichnet y das Gewicht einer gefüllten Kiste und yi für i=1, 2, ..., 100 das
Gewicht der i-ten gefüllten Dose der Kiste, so ist
y = y1 + y2 +....+ y100 + x 3
Also ergibt sich E[y]=E [y1] + ... + E [y100] +E[x 3]= 200 . 100 + 1000 = 21000 g
Und wegen der vorauszusetzenden Unabhängigkeit der yi und x 3
E[(y-21000)2] = 100 . 52 + 202 = 2900
=53.85 g
Seite 41
3 Verteilungsfunktionen
Damit ist das Gewicht einer Kiste nach der Normalverteilung N(21000;53.852) verteilt,
da eine Summe aus unabhängigen und normalverteilten zufälligen Variablen wieder
normalverteilt ist.
3.4.4 Normierte Normalverteilung
Da bei einer Normalverteilung, oft auch kurz als N( ; 2) geschrieben, die Berechnung eines Wertes F(x) nicht durch einfache Integration berechnet werden kann, wird
der Transformationssatz benutzt, um die Berechnung der Verteilungsfunktion auf eine einzige Normalverteilung zurückzuführen. Das ist die sogenannte normierte Normalverteilung N(0;1).
Transformationssatz :
F sei die Verteilungsfunktion einer nach der Normalverteilung N( ; 2) verteilten zufälligen Variablen und
die Verteilungsfunktion der normierten Normalverteilung
N(0;1). Dann gilt für jedes x:
x−µ
Gl. 3.3
F ( x) = Φ(
)
σ
Die Bedeutung des Transformationssatzes liegt darin, dass einmalig die normierte
Normalverteilung numerisch durchgerechnet und anschließend tabelliert wird. Aus
dieser Tabelle können die benötigten Funktionswerte abgelesen werden. Aufgrund
der Symmetrie der Funktion genügt es, nur die positiven x-Werte zu tabellieren, da
Φ (− x) = 1 − Φ ( x)
gilt:
Beispiel 3.8 :
Man berechne den Funktionswert F(3.5) für eine Normalverteilung N(3;12).
Lösung 3.8 :
Man schlägt in einer Tabelle den Wert
F(3.5)=0.6915.
((3.5-3)/1)= (0.5) nach und erhält
Für jede Normalverteilung N( ; 2) kann man ein paar wichtige Zahlen in Zusammenhang mit der Streuung angeben. Im Folgenden die drei wichtigsten Wahrscheinlichkeiten, dass ein Wert im jeweiligen Intervall liegt :
Seite 42
3 Verteilungsfunktionen
Intervall
123-
Wahrscheinlichkeit
0.6826
0.9544
0.9974
Das bedeutet also, dass in einem Intervall von 3 rund um den Erwartungswert
reits 99,74% aller Werte liegen.
be-
Die besondere Bedeutung der Normalverteilung liegt darin, dass sich viele praktisch
vorkommende Zufallsgrößen, speziell technische und physikalische Messgrößen, als
normalverteilt erweisen. Eine Erklärung dafür, warum sich viele praktische Größen
annähernd normalverteilt verhalten, liefert der Zentrale Grenzwertsatz, der besagt:
Unter einer Voraussetzung15 die praktisch stets erfüllt ist, gilt, dass eine Summe
x 1+x2+...+x n von beliebigen zufälligen Variablen (die beliebige und unterschiedliche
Verteilungsfunktionen haben dürfen) bereits dann näherungsweise einer Normalverteilung folgen, falls x1,....,.x n statistisch unabhängig sind und ihre Anzahl n hinreichend groß ist,[BASL89].
F x
-3
-2
-1
f x
1
0.5
0.8
0.4
0.6
0.3
0.4
0.2
0.2
0.1
1
2
3
x
-3
Abb. 3.15 : Verteilungsfunktion der
normierten Normalverteilung
-2
-1
1
2
3
x
Abb. 3.16 : Dichtefunktion der normierten Normalverteilung
Die Gaußsche Glockenkurve, wie die normierte Normalverteilung teilweise auch
genannt wird, entspricht einer Normalverteilung mit den Parametern σ 2 = 1 und µ = 0 .
15
die sogenannte Lindeberg-Bedingung. Sie ist automatisch erfüllt, wenn alle Zufallsvariable die gleiche Verteilungsfunktion haben, also identisch verteilte Zufallsvariable auftreten.
Seite 43
3 Verteilungsfunktionen
3.4.5 Logarithmische Normalverteilung
Eine stetige Zufallsgröße X, welche alle positiven Werte annehmen kann, hat eine
logarithmische Normalverteilung mit den Parametern und 2, wenn eine Zufallsgröße Y mit
Y = log X
normalverteilt ist. Damit ergibt sich die Dichtefunktion zu
2
(log x − µ )
−
1
2
f ( x) =
⋅ e 2⋅σ für x > 0
x ⋅σ ⋅ 2 ⋅ π
und die Verteilungsfunktion zu :
F ( x) =
log x
1
σ ⋅ 2 ⋅π
⋅
e
−
(t −µ )2
2⋅σ 2
⋅ dt für x > 0
−∞
Die Dichtefunktion ist links durch null begrenzt und läuft nach rechts flach aus. Die
Verteilungsfunktion der Lognormalverteilung kann mit Hilfe der normierten Normalverteilung (x) folgenderweise berechnet werden:
F ( x) = Φ (
log x − µ
σ
)
F x
f x
2
1.2
1.75
0
0.2
Die
Zusammenwirken vieler zufäl1
1.5 Lognormalverteilung kann mit dem multiplikativen
liger
Zusammenhang gebracht werden.
1.25 Einflüsse in
0.8
1
0.2
Der
liegt 0.6
bei der Untersuchung von Reparatur1 hauptsächliche Verwendungszweck
0
0.75 Wartungszeiten bzw. bei der Betrachtung von Lebensdaueranalysen.
und
0.4
0.5
0.25
0.2
1
1
2
3
4
5
6
Abb. 3.18 : Dichtefunktion der Lognormalverteilung
x
1
2
3
4
Abb. 3.17 : Verteilungsfunktion der
Lognormalverteilung
Seite 44
5
6
x
3 Verteilungsfunktionen
3.4.6 Exponentialverteilung
Die stetige Zufallsgröße X genügt einer Exponentialverteilung mit dem Parameter ,
wobei > 0 ist, wenn sie eine Dichtefunktion von
f ( x) = λ ⋅ e − λ ⋅ x für x ≥ 0
hat und eine Verteilungsfunktion von
F ( x ) = 1 − e − λ ⋅x für x ≥ 0
Der Mittelwert und die Streuung der Exponentialverteilung lassen sich berechnen zu
µ=
1
σ2 =
λ
1
λ2
f x
F x
2
2
1
2
1.5
0.8
0.6
1
1
0.4
0.5
1
0.2
1
2
3
Abb. 3.19: Dichtefunktion der Exponentialverteilung
4
x
1
2
3
4
x
Abb. 3.20 : Verteilungsfunktion der Exponentialfunktion
Das Einsatzgebiet der Exponentialverteilung erstreckt sich auf die Beschreibung von
Zerfallsprozessen (z.B. radioaktiver Zerfall) und Lebensdauerbetrachtungen.
Bei der Betrachtung von Lebensdauerprozessen beschreibt die Exponentialverteilung eine konstante Ausfallrate von Komponenten pro Zeiteinheit. Besonders günstig
lässt sich dies für die Beschreibung von elektronischen Bauelementen verwenden
(Verschleißfreiheit vorausgesetzt).
Beispiel 3.9 :
Wie viele von N=1000 Einheiten sind nach 100 bzw. 1000h ausgefallen wenn
10E-4 s -1 ist, und nach welcher Zeit sind 10% der Einheiten ausgefallen ?
Seite 45
=
3 Verteilungsfunktionen
Lösung 3.9 :
Nach 100 Stunden sind N F(100) Einheiten ausgefallen. Also
N ⋅ F ( x) = N ⋅ (1 − e − λx ) = 1000 ⋅ (1 − e −10 E − 4⋅100 ) = 95 Einheiten
Nach 1000 Stunden entsprechend :
N ⋅ F ( x) = N ⋅ (1 − e − λx ) = 1000 ⋅ (1 − e −10 E − 4⋅1000 ) = 632 Einheiten
Möchte man die Zeit berechnen, nach der 10% der Einheiten ausgefallen sind, so
muss die Bedingung
F ( x) = 1 − e − λx = 0,1
erfüllt sein. Nach kurzer Umformung ergibt sich damit
x=−
ln 0,9
λ
= 105,36 Stunden
3.4.7 Weibull-Verteilung
Eine stetige Zufallsgröße X genügt dann einer Weibull-Verteilung mit den Parametern und ( > 0, > 0), wenn für die Dichtefunktion gilt
x
f ( x) =
α x (α −1) −( β )α
⋅( )
⋅e
für x ≥ 0
β β
und für die Verteilungsfunktion :
F ( x) = 1 − e
x
−( )α
β
für x ≥ 0
Wenn = 1 dann geht die Weibull-Verteilung in eine Exponentialverteilung mit dem
Parameter = 1/ über. Ein großer Vorteil der Weibull-Verteilung ist die flexible Anpassung der Funktion an die jeweiligen Bedürfnisse. Besonders bei Zuverlässigkeitsbetrachtungen wird die Weibull-Verteilung eingesetzt.
Seite 46
3 Verteilungsfunktionen
Für < 1 ergeben sich Verteilungsfunktionen, die besonders für Frühausfälle günstig
sind. Verwendet man > 1, so ist die Verteilungsfunktion besonders günstig zur Beschreibung von Verschleißausfällen.
Mit dem Parameter kann die Funktion gestreckt bzw. gestaucht werden, um damit
die MTBF (Mean Time Between Failure) der Zuverlässigkeitsfunktion zu verändern.
F x
f x
1
1
0.8
0.8
1
1
2
0.6
0.6
0.4
0.4
2
0.2
4
4
1
2
2
0.2
2
3
4
5
6
x
Abb. 3.21 : Verteilungsfunktion der WeibullVerteilung
1
2
3
4
Um zusätzliche Flexibilität bei Zuverlässigkeitsbetrachtungen mit der WeibullVerteilung zu erhalten, kann noch ein zusätzlicher Parameter eingeführt werden.
Dieser Parameter dient als Lageparameter, mit dem es ermöglicht wird, mehrere
Weibull-Verteilungen zu kombinieren.
Damit ergibt sich die Dichtefunktion zu :
α x − γ (α −1) − ( x β−γ )α
⋅(
)
⋅e
für x ≥ 0
β
β
und die Verteilungsfunktion zu :
F ( x) = 1 − e
−(
x −γ α
)
β
für x ≥ 0
Eine solche 3-parametrige Weibull-Verteilung wird später auch für die sogenannte
„Badewannenkurve“ verwendet.
Seite 47
x
Abb. 3.22 : Dichtefunktion der WeibullVerteilung
3.4.8 3-parametrige Weibull-Verteilung :
f ( x) =
5
3 Verteilungsfunktionen
3.5 Lebensdauerverteilung
Bei den Lebensdauerverteilungen betrachtet man Verteilungen mit der Zeit als Zufallsvariable. Interessant sind also Zeitspannen, die vergehen bis eine bestimmte Anzahl von Einheiten ausgefallen ist. Die Ermittlung solcher Lebensdauerverteilungen
erfolgt mit Lebensdauertests.
3.5.1 Definitionen
Zu Beginn steht eine Anzahl N von Einheiten zur Verfügung, die völlig identisch sind
und alle funktionstüchtig sind. Im Laufe der Zeit werden diese Einheiten ausfallen,
wobei hier davon ausgegangen wird, dass die Einheiten voneinander völlig unabhängig sind, d.h. der Ausfall einer Einheit hat keinen Einfluss auf andere Einheiten.
Zu einem bestimmten Zeitpunkt kann nun betrachtet werden, wie viele der ursprünglichen N Einheiten noch funktionstüchtig sind. Es wird also eine bestimmte Anzahl
von noch funktionstüchtigen Einheiten geben, bezeichnet als ns(t), und eine bestimmte Anzahl von bereits ausgefallenen Einheiten, bezeichnet als nf(t).
Zuverlässigkeit16
Betrachtet man das Verhältnis zwischen den noch funktionstüchtigen Einheiten ns(t)
zu einem bestimmten Zeitpunkt und der Gesamtanzahl N der Einheit, so erhält man
die Zuverlässigkeit R(t) zu :
R(t ) =
ns (t )
n s (t )
=
N
ns (t ) + nf (t )
Zu Beginn des Betrachtungszeitraumes, also für t=0 muss offensichtlich R(0)=1 gelten.
Bei dieser Definition der Zuverlässigkeit ist darauf zu achten, dass die Anzahl der betrachteten Einheiten N groß genug ist, damit die Zuverlässigkeit nicht von einzelnen
Einheiten abhängt.
16
Auch als reliability bezeichnet
Seite 48
3 Verteilungsfunktionen
Ausfallwahrscheinlichkeit17
Betrachtet man die Differenz zwischen der Zuverlässigkeit und eins, so ergibt sich
die Ausfallwahrscheinlichkeit.
F (t ) =
nf (t )
nf (t )
=
= 1 − R(t )
N
ns(t ) + nf (t )
Zu Beginn des Betrachtungszeitraumes gilt offensichtlich F(0)=0, d.h. die Ausfallwahrscheinlichkeit im Zeitnullpunkt ist Null.
Die Summe aus Zuverlässigkeit und Ausfallwahrscheinlichkeit zu einem bestimmten
Zeitpunkt muss immer eins ergeben. Daraus folgt, dass bei steigender Ausfallwahrscheinlichkeit die Zuverlässigkeit abnimmt.
Ausfalldichte
Bildet man die zeitliche Ableitung der Ausfallwahrscheinlichkeit, so erhält man die
Ausfalldichte, die angibt, wie viele Einheiten in einem bestimmten Intervall ausfallen :
f (t ) =
dF (t ) 1 dnf (t )
= ⋅
dt
N
dt
Weiterhin gilt
∞
f ( x) ⋅ dx = 1 sowie F (t ) =
0
t
f ( x) ⋅ dx
0
Ausfallrate
Bezieht man die Ausfalldichte auf die Anzahl der noch funktionstüchtigen Einheiten,
dann erhält man die Ausfallrate zu :
λ (t ) =
1 dnf (t )
⋅
n s (t )
dt
Indem die Ausfälle auf die jeweils noch funktionierenden Einheiten bezogen werden,
erhält man einen besseren Überblick über die Situation zu einem bestimmten Zeitpunkt.
17
Wird auch als probability of failure bezeichnet und mit Q(t) gekennzeichnet
Seite 49
3 Verteilungsfunktionen
Wenn die Ausfalldichte zu zwei verschiedenen Zeitpunkten gleich ist, könnte man auf
den ersten Blick annehmen, dass die Situation zu beiden Zeitpunkten gleich ist. Betrachtet man jedoch die Ausfallrate, so sieht man deutlich, dass dies nicht der Fall ist.
Eine Interpretation der Ausfallrate ist auch die Ausfallwahrscheinlichkeit zum momentanen Zeitpunkt.
Nun soll versucht werden, die Zuverlässigkeit zu einem bestimmten Zeitpunkt direkt
aus der Ausfallrate zu berechnen.
dR(t )
dF (t )
dnf (t ) 1
=−
=−
⋅
dt
dt
dt
N
R(t ) = 1 − F (t ) woraus folgt
Damit ergibt sich
dnf (t )
dR(t )
dies wird eingesetzt in λ (t), und man erhält
= −N ⋅
dt
dt
λ (t ) = −
1
1
dR(t )
N
ersetzt werden kann.
, wobei −
durch
⋅N⋅
dt
ns(t )
R(t )
n s (t )
t
Bildet man nun
λ ( x) ⋅ dx = −
0
t
0
1
⋅ dR( x) = − ln R(t ) so erhält man
R( x)
t
R(t ) = e
( − λ ( x )⋅dx)
0
Wenn man also eine konstante Ausfallrate annimmt, so erhält man eine exponentialverteilte Zuverlässigkeit.
Bei der Bestimmung der Ausfallrate stehen prinzipiell zwei Möglichkeiten zur Verfügung.
•
Messung der Ausfallrate im Labor und anschließende Hochrechnung
Bei der Messung im Labor hat man kurze Prüfzeiten (Stunden bis Wochen), die
Fehleranalyse im Labor ist sehr gut möglich, und die Ausfallbedingungen sind exakt reproduzierbar.
•
Feldversuche
Feldversuche benötigen eine sehr große Stichprobenanzahl (102...105), sind billiger als Labormessungen, da die Führung einer Fehlerstatistik ausreichend ist,
und das Prüfergebnis ist praxisgerecht. Als Nachteil erweist sich jedoch die relativ
lange Prüfzeit.
Seite 50
3 Verteilungsfunktionen
In der Praxis sollten beide Methoden so weit wie möglich kombiniert werden. Aufgrund der Labormessungen erhält man schnelle Ergebnisse und kann so kurzfristig
auf Fehler reagieren, während die Langzeitmessungen in der Praxis für die betriebsgerechte Erfassung der Ausfallrate verwendet werden können.
Als sehr zweckmäßig für Feldversuche erweisen sich integrierte Testsysteme mit
Fehlerspeichereinheiten. Dies erlaubt einerseits vielfältige Auswertungsmöglichkeiten
bei aufgetretenen Fehlern als auch eine vereinfachte Reparatur von ausgefallenen
Einheiten.
Werden bestimmte Qualitätsansprüche verlangt, so stellt sich die Frage wie, die Ausfallrate gesenkt werden kann (und zwar mit
vertretbaren Kosten).
NutzSystem
NutzSystem
NutzSystem
Bei der Realisierung eines reinen Nutzsystems ohne zusätzliche Komponenten zur
Fehlerverringerung hat man eine relativ hohe
Ausfallrate. Im Falle der Verschleißfreiheit
ändert sich die Ausfallrate im Laufe der Zeit
nicht.
FIS
FIS
Um die Ausfallrate im Laufe der Zeit zu verringern, kann eine zusätzliche Fehleridentifikations- und Fehlerspeicher-Schaltung (FIS)
integriert werden. Damit kann die Ausfallrate
bei fortschreitender Produktion verringert
werden.
Eine zusätzliche Verringerung der Ausfallrate
erreicht man durch die Einführung von Fehlertoleranz.
Abb. 3.23 : Systemerweiterung zur
Verbesserung der Ausfallrate
Seite 51
3 Verteilungsfunktionen
3.5.2 Badewannenkurve
Die Badewannenkurve, so genannt wegen des badewannenförmigen Verlaufes, wird
zur Beschreibung von Früh-, Zufalls- und Verschleißausfällen verwendet. Um den
Funktionsverlauf möglichst ideal an die praktischen Ausfälle anpassen zu können,
wird eine 3-parametrige Weibull-Verteilung verwendet. Der dritte Parameter, der zur
Weibull-Verteilung eingeführt wird, ist ein Lageparameter, mit dem es möglich wird,
die Gesamtverteilung aus einzelnen verschobenen Verteilungen zusammenzusetzen.
1
0.3
0.8
0.25
0.6
0.2
0.15
0.4
0.1
0.2
0.05
2
4
6
8
10
12
14
Abb. 3.25 : Dichtefunktion der Badewannenkurve
2
4
6
8
10
12
14
Abb. 3.24 : Verteilungsfunktion der Badewannenkurve
Seite 52
3 Verteilungsfunktionen
Seite 53
3 Verteilungsfunktionen
3.6 Ausfallrate
3.6.1 Ausfallarten
Zunächst soll betrachtet werden, aus welchen Gründen es zu Ausfällen von Systemen kommen kann. Dieses Wissen ermöglicht eine möglichst realistische Modellierung von Systemausfällen.
Frühausfälle (early failures)
Frühausfälle treten sehr bald nach der Inbetriebnahme auf und sind auf Herstellungsoder auch Materialfehler zurückzuführen. Werden solche Fehler während der Produktion bzw. bei abschließenden Qualitätstests nicht entdeckt, so können bei den
ersten Belastungen des Systems im Betrieb Ausfälle auftreten. Dadurch ergibt sich
zu Beginn eine höhere Ausfallrate, die im Laufe der Zeit wieder zurückgeht.
Frühausfälle können durch „Einfahren des Systems“ oder „Einbrennen“ reduziert
werden. Dazu werden die einzelnen Einheiten vor Inbetriebnahme vorgealtert, d.h.
die Einheiten werden unter den späteren Betriebsbedingungen eingesetzt, womit die
anfänglich hohen Ausfälle vorweggenommen werden. Diese „Voralterung“ kann auch
mit überhöhten Betriebstemperaturen durchgeführt werden, um die Alterungszeit zu
verkürzen („Burn-In“).
Zufallsausfälle (random failures)
Zufallsausfälle können während der gesamten Betriebsdauer jederzeit auftreten. Das
Kennzeichen der Zufallsausfälle ist eine konstante Ausfallrate. Eine Möglichkeit der
Verursachung von Zufallsausfällen ist eine Überschreitung von Belastungsgrenzen
und eine daraus resultierende Überbeanspruchung des Gerätes.
Obwohl Zufallsausfälle nicht völlig ausgeschaltet werden können, so können sie
durch erhöhte Zuverlässigkeit deutlich reduziert werden.
Verschleißausfälle (wearout failures)
Die Ursache von Verschleißausfällen liegt in der Alterung von Komponenten, also an
Veränderungen, die sich mit fortlaufender Einsatzdauer einstellen. Darunter fallen
Ermüdungserscheinungen, Oberflächenveränderungen sowie chemische und strukturelle Veränderungen von Materialien. Verstärkt werden diese Effekte besonders
dann, wenn keine oder nur unzureichende Wartung durchgeführt wird. Diese Ausfälle
hängen also in großem Maß von den Umgebungsbedingungen ab und bewirken ein
Seite 54
3 Verteilungsfunktionen
Ansteigen der Ausfallrate gegen Ende der Lebenszeit. Ab diesem Zeitpunkt sollten
auch noch funktionierende Einheiten ausgewechselt werden, um Ausfällen vorzubeugen.
Seite 55
4 Wahrscheinlichkeitsberechnungen
4 Wahrscheinlichkeitsberechnungen für Serien- und
Parallelschaltungen
4.1 Definitionen
Funktionszustände
Angenommen ein System besteht aus einer Vielzahl von Komponenten, welche entweder funktionieren können oder eben nicht. Ebenso wie die einzelnen Komponenten, kann auch das System entweder intakt oder ausgefallen sein. Diese idealisierte
Definition erlaubt keine Zwischenstadien, also Zustände eines „teilweise“ funktionsfähigen Systems.
Funktionswahrscheinlichkeit18
Die Funktionswahrscheinlichkeit ist die Wahrscheinlichkeit, dass ein System, das aus
einer Menge von Komponenten besteht, die teilweise ausgefallen sind, als gesamtes
noch funktioniert. Im folgenden wird die Funktionswahrscheinlichkeit als Rs bezeichnet.
Ausfallwahrscheinlichkeit
Die Ausfallwahrscheinlichkeit ist die Wahrscheinlichkeit, dass ein System aus mehreren Komponenten als Gesamtsystem nicht mehr funktioniert. Im folgenden wird die
Ausfallwahrscheinlichkeit als Fs bezeichnet.
4.2 Zuverlässigkeitsschaltbild
Bei den folgenden Betrachtungen werden die einzelnen Komponenten als Elemente
betrachtet, die nur zwei Zustände annehmen
L
können, intakt oder nicht intakt. Die Darstellung
der Elemente erfolgt durch Rechtecke, welche
R
durch eine Nummer bezeichnet werden. Die Verschaltung dieser Elemente zu einem Gesamtsystem bezeichnet man als Zuverlässigkeitsschaltbild. Es ist zu beachten, dass die elektrische
C
Schaltung einen völlig anderen Aufbau haben
Abb. 4.1 : Schaltung eines Parallelschwingkreises
18
Wird auch als Intaktwahrscheinlichkeit bezeichnet
Seite 56
4 Wahrscheinlichkeitsberechnungen
kann als das Zuverlässigkeitsschaltbild. Als Beispiel soll ein Parallelschwingkreis diedienen.
L
R
C
Die elektrische Schaltung in Abb. 4.1 zeigt
Abb. 4.2 : Zuverlässigkeitsschaltbild eieine Parallelschaltung von drei Komponennes Parallelschwingkreises
ten. Betrachtet man nun das Zuverlässigkeitsschaltbild dieser Schaltung (Abb. 4.2),
so zeigt sich deutlich eine Serienschaltung der einzelnen Einheiten, da der Ausfall
einer einzigen Komponente das System funktionsuntüchtig macht19.
4.3 Wahrscheinlichkeiten von Systemen
Im folgenden werden Systeme behandelt, die aus einzelnen Komponenten ei bestehen. Jede dieser Komponenten kann einsatzfähig oder ausgefallen sein. Die Wahrscheinlichkeit, dass eine Komponente intakt ist, bezeichnet man als Funktionswahrscheinlichkeit
P(ei) = Ri = q
bzw. die Wahrscheinlichkeit, dass ein System ausgefallen ist bezeichnet man als Ausfallwahrscheinlichkeit
ei
Abb. 4.2 : Symbol einer
Komponente
P( ei) = Fi = p = 1-q
4.3.1 Seriensystem
Definition: Unter einem Seriensystem versteht man ein System, das aus n Komponenten in Serie besteht und genau dann funktionsfähig ist, wenn alle Komponenten
funktionsfähig sind.
Das Seriensystem kann man sich als Kette von Komponenten vorstellen, die alle
funktionstüchtig sein müssen, damit das Gesamtsystem ebenfalls funktionsfähig ist.
19
Wobei hier vorausgesetzt wird, dass eine Abweichung des Schwingkreises von der
gewünschten Funktion als Funktionsausfall interpretiert wird.
Seite 57
4 Wahrscheinlichkeitsberechnungen
e1
e2
Abb. 4.3 : Seriensystem
Unter der Voraussetzung, dass die Funktionswahrscheinlichkeiten der Einheiten
gleich groß sind, also P(e1) = P(e2), ergibt sich die Funktionswahrscheinlichkeit des
Systems zu
Rs (e1e2) = P(e1) . P(e2) = q2 = (1-p)2
Im Allgemeinen ergeben sich für n Komponenten in Serie
Rs (e1
e2
...
n
en) = ∏ P (ei) = q n = (1 − p ) n
i =1
Wenn p << 1, dann lässt sich dieses Ergebnis vereinfachen zu (1-p)n
1-np.
Daraus folgt, dass die Funktionswahrscheinlichkeit eines Seriensystems geringer ist
als die Funktionswahrscheinlichkeit der einzelnen Komponenten. Ein System, welches aus vielen Einzelkomponenten mit kleinen Ausfallwahrscheinlichkeiten besteht,
kann als Gesamtsystem also durchaus eine große Ausfallwahrscheinlichkeit besitzen. Bei der Berechnung der Ausfallwahrscheinlichkeit ist zu beachten, dass das
System ausfällt, wenn auch nur eine einzige Komponente ausfällt.
Somit ergibt sich für die Ausfallwahrscheinlichkeit20
FS( e 1
e2) = P( e1) + P( e2) – P( e1).P( e2) = 2p – p2
Für p << 1 gilt die Näherung
FS( e1
e2)
2p.
Damit ergibt sich für den allgemeinen Fall mit n Komponenten
n
FS (¬e1 ∪ ¬e2 ∪ ... ∪ ¬en) = 1 − ∏ P (ei ) = 1 − q n = 1 − (1 − p) n
n
i =1
Den Term (1-p) kann man für p << 1 vereinfachen, wodurch FS( e1 ...
folgt.
en)
np
Daraus folgt, dass die Ausfallwahrscheinlichkeit umso größer ist, je mehr Komponenten in Serie geschaltet werden.
20
Unter der Voraussetzung, dass alle P(ei) gleich sind
Seite 58
4 Wahrscheinlichkeitsberechnungen
Beispiel 4.1 :
100 Komponenten mit einer Funktionswahrscheinlichkeit von P(ei)=0.99 sollen in Serie geschaltet sein. Man berechne die Funktionswahrscheinlichkeit des Systems.
Lösung 4.1 :
Die Funktionswahrscheinlichkeit ergibt sich zu
Rs = 0.99100 = 0.366 also 36.6 %
Stellt man sich dieses System als Platine mit 100 Widerständen vor, so würde nur
ein Drittel (!) der Platinen funktionstüchtig sein (wobei Widerstände jedoch eine weit
höhere Funktionswahrscheinlichkeit haben).
Berechnet man die Funktionswahrscheinlichkeit mit Hilfe der zuvor gemachten Näherung, so ergibt sich
RS = ( 1-p ) n ≈ 1-np = 0 (!)
Die Verwendung der Näherung liefert hier also ein völlig falsches Ergebnis.
4.3.2 Parallelsystem
Definition: Unter einem Parallelsystem versteht man ein System, das aus n parallel
geschalteten Komponenten besteht und genau dann funktionsfähig ist, wenn zumindest eine Komponenten funktionsfähig ist.
e1
Die Funktionswahrscheinlichkeit des Systems ist
RP(e1 e2) = P(e1) + P(e2) – P(e1).P(e2) = 2q-q2
e2
Im allgemeinen Fall für n Komponenten ergeben
sich für die Funktionswahrscheinlichkeit
n
Rp (e1 ∪ e 2 ∪ ... ∪ en) = 1 − ∏ P (¬ei)
i =1
Abb. 4.4 : Parallelsystem
Also RP = 1-pn
Seite 59
4 Wahrscheinlichkeitsberechnungen
Bei der Berechnung der Ausfallwahrscheinlichkeit ist zu beachten, dass das System
nur dann ausfällt, wenn alle Komponenten ausfallen.
Für die Ausfallwahrscheinlichkeit ergibt sich damit
FP( e 1
e2) = P( e1).P( e2) = p2
oder allgemein für n Komponenten
n
FP (¬(e1 ∪ e 2 ∪ ... ∪ en)) = FP (¬e1 ∩ ¬e 2 ∩ ... ∩ ¬en) = ∏ P (¬ei) = p n = (1 − q ) n
i =1
Die Ausfallwahrscheinlichkeit einer Parallelschaltung ist also geringer als die Ausfallwahrscheinlichkeit der einzelnen Komponenten.
Beispiel 4.2 :
Ein System hat aus Redundanzgründen drei parallel geschaltete Komponenten mit
Funktionswahrscheinlichkeiten von P(e1) = 0.8, P(e2) = 0.85 und P(e3) = 0.9. Man
berechne die Funktionswahrscheinlichkeit des Systems.
Lösung 4.2 :
RP=1-((1-0.8) x (1-0.85) x (1-0.9)) = 0.997 also 99.7 %
Man sieht, dass trotz der relativ schlechten Funktionswahrscheinlichkeiten der Einzelkomponenten das Gesamtsystem eine viel höhere Funktionswahrscheinlichkeit
hat.
4.3.3 Serienparallelsystem
Die Berechnung von einzelnen Systemen mit rein parallelen Komponenten bzw. rein
seriellen Komponenten wurde bereits abgehandelt. Werden sowohl parallele als
auch serielle Verschaltungen vorgenommen, dann spricht man von Serienparallelsystemen. Diese sollen nun etwas genauer betrachtet werden.
Um die Darstellung dieser Systeme zu vereinfachen, sollen ab nun die Wirkrichtung
weggelassen und nur noch die Komponenten dargestellt werden.
Seite 60
4 Wahrscheinlichkeitsberechnungen
e11
e21
e12
e11
e12
e21
e22
e31
e32
e22
Abb. 4.5 : Serienparallelsystem mit
eingezeichneten Wirkrichtungen
Abb. 4.6 : Vereinfachte Darstellung eines Serienparallelsystems
Zuerst soll die Funktionswahrscheinlichkeit genauer betrachtet werden.
m
RPk ( Ak ) = 1 − ∏ P (¬eik ) = 1 − p m
i =1
Damit das Gesamtsystem funktioniert, muss jeweils eine Komponente eines Parallelzweiges funktionstüchtig sein.
Ak = e1k
e2k ... enk
Damit ist die Funktionswahrscheinlichkeit eines Parallelzweiges bestimmt. Die einzelnen Parallelzweige werden nun noch in Serie geschaltet. Damit erhält man die
Funktionswahrscheinlichkeit des Gesamtsystems zu:
n
RPS = ∏ RP , k ( Ak ) = (1 − p m ) n
k =1
Bis jetzt wurde immer davon ausgegangen, dass alle Komponenten im System die
gleiche Funktionswahrscheinlichkeit haben. In realen Systemen wird das jedoch sehr
selten der Fall sein, da solche Systeme aus vielen verschiedenen Komponenten mit
jeweils unterschiedlichen Funktionswahrscheinlichkeiten bestehen.
Seite 61
4 Wahrscheinlichkeitsberechnungen
e11
e12
e1n
k
e21
e22
e2n
m
e31
e32
e3n
A1
A2
An
Abb. 4.7 : Serienparallelsystem mit 3.n Komponenten
Im Folgenden sollen daher die Berechnungsvorschriften für beliebige Subsysteme betrachtet
werden, welche man zum gewünschten System zusammenschalten kann.
Für ein Subsystem aus parallel geschalteten Komponenten gilt:
n
RP = 1 − ∏ (1 − qi )
i =1
während für in Serie geschaltete Komponenten gilt:
n
RS = ∏ qi
i =1
Seite 62
n
4 Wahrscheinlichkeitsberechnungen
4.3.4 Vernetztes System
Der Sinn von Systemen mit Parallelzweigen liegt darin, die Funktionsfähigkeit auch
bei Ausfall einer Komponente weiterhin aufrechtzuerhalten. Damit wäre eine Lösung,
um Redundanz und damit erhöhte Ausfallsicherheit zu erreichen, möglichst viele
Komponenten parallel aufzubauen.
Sieht man sich ein System an, wie z.B. das dargestellte Seriensystem mit drei Komponenten, dann könnte man aus Redundanzgründen einige Parallelzweige einfügen.
Dies würde den Aufwand des Systems und damit auch die Kosten jedoch erhöhen.
A1
B1
C1
Abb. 4.8 : Einfaches System mit drei Komponenten
A1
B1
C1
A2
B2
C2
A3
B3
C3
Abb. 4.9 : Dreifach redundantes System
Um die zusätzlichen Kosten in Grenzen zu halten und dennoch eine erhöhte Ausfallsicherheit zu erreichen, bieten
sich vernetzte Systeme an. Dabei hat
jede Komponente nicht nur eine Serienverbindung zur nachfolgenden
Komponente, sondern zusätzlich auch
noch Verbindungen zu anderen Serienzweigen.
Um schließlich auch noch entscheiden
zu können welche Komponenten nun
richtige Ergebnisse liefern und welche
aufgrund eines Defektes Falschmeldungen ausgeben sind auch noch sogenannte Voter ( Vi ) notwendig.
Die genaue Funktionsweise solcher
vernetzter Systeme wird später bei
den NMR Systemen noch ausführlich
erläutert.
A1
B1
V1
C1
A2
B2
V2
C2
Abb. 4.10 : Vernetztes System zur Erhöhung der Funktionswahrscheinlichkeit
Seite 63
4 Wahrscheinlichkeitsberechnungen
4.4 Dualitätsprinzip
Das Dualitätsprinzip stellt einen Zusammenhang zwischen der Funktionswahrscheinlichkeit und der Ausfallwahrscheinlichkeit her. Es besagt, dass die Summe aus Funktions- und Ausfallwahrscheinlichkeit bei einem System immer eins ergibt.
Hier zusammengefasst die Parallelschaltung:
Funktionswahrscheinlichkeit :
Ausfallwahrscheinlichkeit :
RP = 1 - p n = 1- (1-q) n
FP = p n
= (1-q) n
Betrachtet man nun die Summe, so ergibt sich
RP + FP = 1-pn + pn = 1
bzw. RP + FP = 1-(1-q)n + (1-q)n = 1
Analog gilt für die Serienschaltung:
Funktionswahrscheinlichkeit :
Ausfallwahrscheinlichkeit :
RS = (1-p) n
=qn
FS = 1- (1-p) n = 1- q n
Wenn man auch hier die Summe betrachtet, so folgt
RS + FS = (1-p) n + 1 – (1-p) n = 1
bzw. RS + FS = q n + 1 – q n = 1
Damit kann man das Dualitätsprinzip angeben zu:
RS + F S = 1
RP + F P = 1
Das Dualitätsprinzip kann Vorteile bei der Wahrscheinlichkeitsberechnung von Systemen bringen, da nur eine Wahrscheinlichkeit berechnet werden muss und damit
sofort auf den anderen Wert geschlossen werden kann.
Hier nun ein Beispiel für die Anwendung des Dualitätsprinzips anhand einer Serienbzw. Parallelschaltung von 4 Komponenten.
Seite 64
4 Wahrscheinlichkeitsberechnungen
Beispiel 4.3 :
Ein System besteht aus 4 Komponenten mit einer Funktionswahrscheinlichkeit von
jeweils P(ei) = 0.95. Man berechne die Ausfalls- und die Funktionswahrscheinlichkeit,
wenn die Komponenten einmal in Serie und einmal parallel geschaltet sind.
Lösung 4.3 :
Für die Parallelschaltung ergibt sich die Ausfallwahrscheinlichkeit zu
FP = (1 - q) n = (1 – 0.95) 4 = 6,25E-6
0.95
wodurch aufgrund des Dualitätsprinzips sofort folgt
0.95
RP = 1 – 6,25E-6 = 0,99999375
0.95
Bei der Serienschaltung lässt sich die Funktionswahrscheinlichkeit ganz einfach berechnen nach
n
0.95
4
RS = q = 0.95 = 0.8145
Abb. 4.11 : Parallelschaltung
Und mit dem Dualitätsprinzips ergibt sich für die
Ausfallwahrscheinlichkeit sofort
FS = 1- RS = 0.1855
0.95
0.95
Abb. 4.12 : Serienschaltung
Seite 65
0.95
0.95
4 Wahrscheinlichkeitsberechnungen
4.5 Modellierung
4.5.1 Einführung
Bei der Berechnung von Zuverlässigkeiten für Systeme ergeben sich bereits bei einfacheren Systemen aufwendige Berechnungen. Deshalb soll ein Programm entwickelt werden, dass die Berechnung der Zuverlässigkeit von beliebigen Systemen ermöglicht. Dabei wird keine geschlossene Lösung gefordert, sondern es werden Zufallszahlen zur numerischen Lösungsfindung verwendet.
4.5.2 Beschreibung der Simulation
Die Simulation verwendet als Ausgangspunkt für die Berechnung ein Zuverlässigkeitsschaltbild (Abb. 4.14) welches aus der realen Schaltung gewonnen werden kann
(Abb. 4.13). Jede Komponente Li wird durch einen Schalter Si ersetzt, der die Funktionsfähigkeit der Komponente darstellt (Abb. 4.15). Ist der Schalter geschlossen, so
ist die Komponente funktionstüchtig, andernfalls ist die Komponente nicht funktionstüchtig.
L1
L
L2
R
L3
L1
L2
L3
L
R
C
C
Abb. 4.13 : Reale Schaltung eines Parallelschwingkreises
S1
S2
Abb. 4.14 : Zuverlässigkeitsschaltbild
eines Parallelschwingkreises
S3
Iteration xi
Iteration xi+1
Iteration xi+2
Abb. 4.15 : Drei mögliche Zustände des simulierten Parallelschwingkreises
Seite 66
4 Wahrscheinlichkeitsberechnungen
Die Berechnung der Zuverlässigkeit des Systems erfolgt durch imax Iterationen. Bei
jedem Durchlauf, beginnend mit iact=0, werden folgende Schritte durchgeführt:
1. Für jeden Schalter wird eine statistisch unabhängige Zufallszahl bestimmt. Falls
die Zufallszahl kleiner als die Funktionswahrscheinlichkeit der Komponente ist, so
wird der Schalter als geöffnet markiert (Si=true). Ist die Zufallszahl größer als die
Funktionswahrscheinlichkeit, so wir der Schalter als geschlossen markiert
(Si=false).
2. Nun wird untersucht, ob es zwischen dem Eingang des Systems und dem Ausgang des Systems eine geschlossene Verbindung gibt. Ist dies der Fall, so wird
ein Zähler ipos erhöht, andernfalls ändert sich ipos nicht.
3. Danach wird iact um 1 erhöht. Finden noch weitere Iterationen statt (iact<imax) so
wird wieder mit Schritt eins begonnen.
4. Sollten alle Iterationen durchgeführt sein (iact=imax), so lässt sich die Zuverlässigkeit des Systems aus
R = ipos / imax
berechnen.
4.5.3 Programmübersicht „Monte Carlo“ Simulation
Das Simulationsprogramm zur numerischen Berechnung von Systemzuverlässigkeiten basiert auf Java 1.2 und ist somit auf allen Plattformen ausführbar.
Die Programmoberfläche besteht aus 3 unterschiedlichen Abschnitten:
•
Der obere Abschnitt dient zur Eingabe von Komponentendaten, z.B. der Funktionswahrscheinlichkeit. Hier wird auch zwischen den einzelnen Komponenten
umgeschaltet. Sämtliche Wahrscheinlichkeitswerte werden in Prozent (%) angegeben.
•
Der mittlere Abschnitt dient zur grafischen Konstruktion des Systems. Jede Komponente wird durch eine Linie dargestellt und jede Verbindung zwischen Komponenten als Punkt. Um Verbindungen darzustellen, die nie ausfallen, kann eine
Funktionswahrscheinlichkeit von 100% angegeben werden.
Der Punkt mit der Bezeichnung „IN“ stellt den Eingang des Systems dar, während
der Punkt „OUT“ den Systemausgang bezeichnet.
Seite 67
4 Wahrscheinlichkeitsberechnungen
•
Im unteren Abschnitt befinden sich globale Parameter und die Ausgaben des Programms. Hier lässt sich auch angeben, wie viele Iterationen durchgeführt werden.
In Abb. 4.16 sieht man die Bildschirmaufteilung und die Berechnung eines Seriensystems von zwei Komponenten mit einer Funktionswahrscheinlichkeit von jeweils 50%.
Als Beispiel sollen im folgenden die Berechnungen aus Beispiel 4.3 : simuliert werden. Die Simulation verwendet 107
Iterationen zur Berechnung. Die Anzahl der Iterationen wird später noch
genauer betrachtet.
Die Simulation liefert eine
Wahrscheinlichkeit für die
Funktion des Systems
von 81.45244%.
Abb. 4.16 : Berechnung eines Seriensystems
Vergleicht man dies mit dem errechneten Wert aus Beispiel 4.3, so ergibt sich eine
Differenz von 0.00244%.
Abb. 4.17 : Berechnung des Seriensystems aus Beispiel 4.3
Seite 68
4 Wahrscheinlichkeitsberechnungen
Die Simulation des Parallelsystems liefert eine
Wahrscheinlichkeit von
99.99935%. Dies ist eine Abweichung um
0.00064375 % zu dem
errechneten Wert in
Beispiel 4.3.
Abb. 4.18 : Berechnung des Parallelsystems aus Beispiel 4.3
4.5.4 Histogramm
Ein Histogramm ist eine flächenproportionale Darstellung der Häufigkeitsverteilung
einer Variablen. Es besteht aus mehreren, aneinander angrenzender, Säulen. Die
Fläche der Säulen entspricht der Häufigkeit im jeweiligen Säulenintervall.
Nach dem Durchlaufen der „Monte Carlo“ Simulation erhält man die relative Häufigkeit der zufällig funktionierenden Realisierungen des Systems. Über das Vertrauensintervall, also den Bereich in dem die tatsächliche Funktionswahrscheinlichkeit mit
hinreichender Wahrscheinlichkeit liegt, lässt sich damit jedoch keine Aussage treffen.
Durch mehrmaliges durchlaufen der Simulation und visualisieren der Ergebnisse in
bestimmten Intervallen, erhält man jedoch eine Aussage über die Güte der Simulation. Je mehr Durchläufe der Simulation ausgeführt werden, desto besser wird das Ergebnis. Diese Verbesserung des Ergebnisses macht sich durch ein schmäleres
Histogramm bemerkbar.
Die „Monte Carlo“ Software bietet die Darstellung der Häufigkeitsverteilung als
Histogramm an, um eine bessere Anschaulichkeit für den Benutzer zu erreichen. Aus
Gründen der Einfachheit werden nur Säulen mit gleicher Breite unterstützt.
Seite 69
4 Wahrscheinlichkeitsberechnungen
Die Darstellung kann sowohl
bezüglich des betrachteten
Intervalls als auch in Bezug
auf die Gesamtanzahl der
dargestellten Säulen verändert werden.
In Abb. 4.19 ist ein
Histogramm für die Häufigkeitsverteilung der Funktionswahrscheinlichkeit über
ein Intervall von 0% bis
Abb. 4.19 : Histogramm 0%-100%
100% aufgezeigt. Zur besseren Anschaulichkeit wird in
Abb. 4.20 das Intervall eingeschränkt auf einen Bereich von 20% bis 30%. Durch
diese eingeschränkte Darstellung wird die Häufigkeitsverteilung deutlicher sichtbar.
Es ist zu beachten, dass bei beiden Darstellungen eine Unterteilung der gesamten
Häufigkeitsverteilung in 100 Säulen erfolgt, d.h. die Intervallbreite bei beiden Darstellungen gleich ist.
Abb. 4.20 : Histogramm 20%-30% (100 Intervalle)
Seite 70
4 Wahrscheinlichkeitsberechnungen
Um eine detailliertere Ausgabe zu erhalten, kann auch die Anzahl der Säulen erhöht
werden (Abb. 4.21). Damit kann die Häufigkeitsverteilung in einem bestimmten Intervall anschaulicher dargestellt werden.
Eine Neuberechnung des
Systems kann jederzeit
durchgeführt werden. Bei
einer
Neuberechnung
passt sich das Histogramm
automatisch an die neu berechneten Werte an.
Dies ist speziell zum Vergleich verschiedener Iterationen sehr hilfreich.
Abb. 4.21 : Histogramm 20%-30% (500 Intervalle)
Seite 71
4 Wahrscheinlichkeitsberechnungen
4.5.5 Probleme bei der Simulation
Zufallszahlen
Um aussagekräftige Resultate zu erhalten, müssen die Zufallszahlen statistisch unabhängig sein. Zumindest während der Dauer der Simulation, das sind imax*Smax Werte, muss die statistische Unabhängigkeit der Werte gegeben sein.
Anzahl der Iterationen
Ein wichtiger Punkt bei der Simulation ist die ausreichend hohe Zahl von Iterationen
bei der Berechnung. Da die Anzahl der Iterationen großen Einfluss auf die Dauer der
Berechnung hat, geht die Bestrebung natürlich zu einer möglichst geringen Anzahl.
Dies hat jedoch schwerwiegende Nachteile für die Aussagekraft der Berechnung.
Betrachtet man einen Würfel, bei dem die Wahrscheinlichkeit, eine bestimmte Zahl
zu würfeln, 1/6 beträgt, so sollten mindestens 6 Iterationen ausgeführt werden. Bei 6
Iterationen ergibt sich die Wahrscheinlichkeit, dass mindestens einmal der gewünschte Wert gewürfelt wurde, zu q=1-(1-1/6)6 = 66.51%. Betrachtet man p→0, so
ergibt sich ein Grenzwert von (1-1/e). Für die verwendete Simulationsmethode wären
also mindestens 1/(1-q) Durchläufe notwendig, um ein eine Zuverlässigkeit von q zu
simulieren.
Bei realistischen Werten von q (10-12) werden damit Rechenzeiten von mehreren Tagen bis Wochen erreicht. Die oben durchgeführten Berechnungen für Beispiel 4.3
dauerten etwa 5 Minuten auf einen Standard PC-System (Stand 2002).
Seite 72
4 Wahrscheinlichkeitsberechnungen
Seite 73
4 Wahrscheinlichkeitsberechnungen
4.6 Teilredundanz
4.6.1 Definitionen
Redundanz wird verwendet, um beim Ausfall von Komponenten das Gesamtsystem
dennoch funktionsfähig zu halten. Bei Systemen mit voller Redundanz reicht bereits
die Funktionsfähigkeit einer einzelnen Komponente, um die Funktion des Gesamtsystems aufrechtzuerhalten. Diese volle Redundanz entspricht den einfachen Parallelschaltungen, die zuvor behandelt wurden.
Bei der sogenannten Teilredundanz ist zwar mehr als eine Komponente notwendig,
um die Funktion aufrechtzuerhalten, jedoch nicht alle Komponenten. Diese Systeme
– auch (n von k) Systeme bezeichnet – werden nun im Folgenden behandelt.
Im folgenden Abschnitt wird jeweils vorausgesetzt, dass die einzelnen Komponenten
unabhängig voneinander sind, wodurch die Berechnung stark vereinfacht wird. Diese
Voraussetzung ist in der Praxis nicht immer gegeben. Angenommen, ein Netzteil ist
dreifach redundant aufgebaut und im normalen Betriebsfall erfolgt eine Lastteilung
zwischen den drei Komponenten. Fällt nun eine Komponente aus, dann müssen die
beiden anderen Komponenten zusätzliche Last übernehmen, wodurch sich deren
Lebensdauer verkürzen wird. Das wäre also ein Fall, in dem die Unabhängigkeit der
Komponenten nicht gültig ist.
4.6.2 (k von n) System
Ein (k von n) System ist ein teilredundantes System, bei dem zur Aufrechterhaltung
der Funktionsfähigkeit mindestens k Einheiten von insgesamt n Einheiten funktionsfähig sein müssen. Darin ist auch die Definition der vollständigen Redundanz mit k=1
als Spezialfall berücksichtigt.
Wenn von insgesamt n Einheiten zumindest k Einheiten funktionsfähig sein müssen,
ergibt sich die minimale Anzahl von Ausfällen die zum Gesamtausfall des Systems
führen zu:
a=n–k+1
Die Wahrscheinlichkeit, dass dieser Fall auch eintritt, lässt sich mit der Binomialverteilung berechnen (bei homogener Redundanz) :
f (a) =
n
⋅ q n− a ⋅ p a
a
Seite 74
4 Wahrscheinlichkeitsberechnungen
Hierbei bedeutet q die Funktionswahrscheinlichkeit und p die Ausfallwahrscheinlichkeit.
Nun ist aber nicht interessant, wie wahrscheinlich genau a Einheiten ausfallen, sondern die Ausfallwahrscheinlichkeit des Gesamtsystems ist der interessierende Wert.
Das Gesamtsystem fällt aus, wenn a Einheiten oder mehr (maximal alle n Einheiten)
ausfallen.
Daraus folgt offensichtlich, dass die Ausfallwahrscheinlichkeit die Summe dieser Einzelwahrscheinlichkeiten darstellt.
Ausfallwahrscheinlichkeit :
n
Fa =
f (i ) =
i=a
n
i=a
n
⋅ q n −i ⋅ p i
i
Die Funktionswahrscheinlichkeit, d.h. dass mindestens k Komponenten noch funktionstüchtig sind, ergibt sich zu
Funktionswahrscheinlichkeit :
Ra =
n
i=k
n
⋅ p n −i ⋅ q i
i
Beispiel 4.4 :
Ein Gerät wird mit drei Netzteilen versorgt, wovon mindestens zwei funktionieren
müssen. Jedes Netzteil hat eine Funktionswahrscheinlichkeit von q=0.995. Es wird
angenommen, dass die drei Netzteile voneinander unabhängig sind (Betrieb mit nur
zwei Netzteilen nur als kurzfristige Lösung). Man berechne die Ausfallwahrscheinlichkeit, wenn das Gerät nur mit einem Netzteil betrieben würde und die Ausfallwahrscheinlichkeit, wenn es mit drei Netzteilen (von denen zwei funktionieren müssen)
betrieben wird.
Lösung 4.4 :
Wird das Gerät nur mit einem Netzteil betrieben, so ergibt sich eine Ausfallwahrscheinlichkeit von
F1 = 0.005
Verwendet man hingegen Teilredundanz so ergibt dieses (2 von 3) System eine Ausfallwahrscheinlichkeit von
Seite 75
4 Wahrscheinlichkeitsberechnungen
F2 =
+
3
3
3
2
⋅ 0.9951 ⋅ 0.0052 +
⋅ 0.9950 ⋅ 0.0053 = 0.00007475
Ganz abgesehen von der viel besseren Ausfallwahrscheinlichkeit hat diese Teilredundanz noch
einen weiteren entscheidenden Vorteil. Fällt ein
Netzteil aus (meistens wird zuerst eines ausfallen
und nicht sofort zwei) so kann es sofort (im laufenden Betrieb) ausgetauscht werden. Damit ist es
praktisch möglich die Ausfälle der Netzteile vom
Gerät fast zur Gänze abzuhalten. Dies ist jedoch
mit den bisher beschriebenen Methoden nicht modellierbar.
NT1
NT2
G
e
r
ä
t
NT3
Abb. 4.22 : 3-fache Stromversorgung
eines Gerätes
Seite 76
4 Wahrscheinlichkeitsberechnungen
Seite 77
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Bei den folgenden Betrachtungen über die Zuverlässigkeit und im Besonderen über
die Sicherheit von Systemen, wird vom zeitlichen Gesichtspunkt des Systems ausgegangen.
5.1 Definitionen
Zu Beginn des Kapitels werden die wichtigsten Begriffe erläutert, welche zur Betrachtung von Systemen benötigt werden.
5.1.1 Zuverlässigkeit
Ein Maß dafür, dass eine Einheit funktionstüchtig bleibt, ist die Zuverlässigkeit. Eine
Einheit kann dabei jedes beliebige System sein, welches als Ganzes betrachtet werden kann (Bauteile, Werkstoffe, Geräte, Produktionsmaschinen, ...). Im Folgenden
soll die Zuverlässigkeit mit R21 bezeichnet werden. Sie wird angegeben als die
Wahrscheinlichkeit, dass eine Einheit die erwartete Funktion während einer bestimmten Zeitdauer erfüllt. Die erwartete Funktion gibt die Aufgabe der jeweiligen Einheit
an, z.B. dass eine bestimmte Spannung nicht überschritten wird. Neben der erwarteten Funktion müssen auch noch die Arbeitsbedingungen (Temperaturen, Drücke,
Spannungen, Ausgangszustand, ...) festgelegt werden. Da die Arbeitsbedingungen
einen entscheidenden Einfluss auf die Zuverlässigkeit ausüben, ist deren Definition
äußerst wichtig, wobei die Arbeitsbedingungen auch zeitlich variabel sein können.
Weiterhin muss noch die Zeitdauer T definiert werden, während der die Einheit funktionstüchtig sein muss. Damit gibt die Zuverlässigkeit die Wahrscheinlichkeit an, dass
kein Ausfall der Einheit auftritt.
Bei der Zuverlässigkeit wird unterschieden zwischen der vorausgesagten Zuverlässigkeit und der geschätzten Zuverlässigkeit. Die vorausgesagte Zuverlässigkeit wird
rechnerisch durch die Zuverlässigkeiten der Einzeleinheiten berechnet. Im Gegensatz dazu ergibt sich die geschätzte Zuverlässigkeit durch experimentelle Versuche
und anschließende statistische Auswertung.
Als einfache Beispiele sollen hier die zeitlichen Zuverlässigkeitsfunktionen von Serien- und Parallelsystemen betrachtet werden.
21
Reliability
Seite 78
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
R t
1
Wie bereits in Kapitel 4 dargestellt,
ergibt sich die Zuverlässigkeit eines Seriensystems aus
0.8
0.6
n 1
0.4
n
0.2
n 3
RS (t ) = ∏ Ri(t )
n 2
i =1
n 5
0.5
1
1.5
t
2
Wobei die Zuverlässigkeiten der
Teilsysteme
exponentialverteilt
angenommen werden sollen. Daraus ergibt sich, wie Abb. 5.1 zeigt, eine sinkende Zuverlässigkeit mit steigender Anzahl der Teilsysteme.
Abb. 5.1 : Zuverlässigkeit von Seriensystemen
Nun soll auch das Parallelsystem bezüglich der Zuverlässigkeit untersucht werden. .
Bei der Betrachtung eines Parallelsystems ergibt sich die
Zuverlässigkeit zu
R t
1
0.8
0.6
0.4
n 1
n 2
n 3
n 5
RP (t ) = 1 − [1 − Ri(t )]n = 1 − [1 − e − λi ] n
0.2
Wie zu erwarten war, verbessert sich die Zuverlässigkeit
mit steigender Anzahl der paAbb. 5.2 : Zuverlässigkeit eines Parallelsystems
rallel geschalteten Teilsysteme. Denn funktioniert auch
nur ein einziges Teilsystem,
kann das Gesamtsystem als funktionsfähig betrachtet werden.
1
2
3
4
5
Seite 79
t
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
5.1.2 Ausfall
Wenn eine Einheit die erwartete Funktion nicht mehr ausführt, spricht man von einem
Ausfall. Neben dem Begriff Ausfall wird auch noch der Begriff Störung verwendet, um
kenntlich zu machen, dass es sich nur um eine Unterbrechung der erwarteten Funktion handelt. Ausfälle können nach verschiedenen Kriterien betrachtet werden [BIRO91]:
•
Art: Gibt an, wie der Ausfall entstanden ist. Bei der Art des Ausfalls kann man unterscheiden zwischen Sprungausfall (plötzlicher Ausfall durch Kurzschluss, Bruch,
...) Driftausfall (Ausfall durch ständige Verschlechterung eines Parameters) und
intermittierendem Ausfall.
•
Ursache: Gibt an, wodurch sich der Ausfall ergeben hat. Hier kann man unterscheiden zwischen Primärausfällen und Folgeausfällen. Weiters kann man eine
Unterscheidung treffen zwischen Verschleißausfällen, inhärenten Ausfällen sowie
Ausfällen durch Bedienungsfehler.
•
Auswirkung: Die Auswirkung zeigt, wie stark sich der Ausfall auf weitere Einheiten
bzw. auf das Gesamtsystem auswirkt. Die Bandbreite reicht hier von keiner Auswirkung über Teilausfall und Vollausfall zu überkritischem Ausfall. Unter letzterem
versteht man einen Ausfall, nach dem die Sicherheit nicht mehr gewährleistet ist.
5.1.3 Ausfallrate
Die Definition der Ausfallrate erfolgte bereits in Kapitel 3. Da die Ausfallrate jedoch
eine wichtige Größe bei Zufallsanalysen darstellt, soll sie hier nochmals kurz betrachtet werden und der Zusammenhang mit MTTF22 und MTBF23 dargestellt werden.
Zur Zeit t=0 werden N statistisch unabhängige Einheiten unter den gleichen Bedingungen in Betrieb gesetzt. Nach einer gewissen Zeit t=t1 sind noch n(t)=n(t1) Einheiten in funktionsfähigem Zustand. n(t) ist eine fallende Treppenfunktion, welche von
n(t)=N bei t=0 bis auf n(t)=0 für t → ∞ abfällt. Die Zeiten t1, . . ., tn seien die beobachteten Zeitpunkte bei denen n(t) bestimmt wird. Sie sind unabhängige Realisierungen
einer Zufallsgröße, welche hier als τ bezeichnet werden soll.
22
23
Mean Time To Failure
Mean Time Between Failure
Seite 80
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Damit ergibt sich
MT̂TF =
t1 + . . . + tn
N
als der empirische Mittelwert der Zufallsgröße τ. Für N → ∞ konvergiert der empirische Mittelwert gegen den wahren Mittelwert MTTF=E[τ].
Die Funktion
n (t )
Rˆ =
N
wird als die empirische Zuverlässigkeitsfunktion bezeichnet, welche für N → ∞ gegen
die wahre Zuverlässigkeitsfunktion R(t) konvergiert24. Eine weitere wichtige Größe ist
die empirische Ausfallrate
λˆ (t ) =
n (t ) − n(t + dt )
n(t )dt
Aus diesen Gleichungen ergibt sich
Rˆ (t ) − Rˆ (t + dt )
λˆ (t ) =
Rˆ (t )dt
Setzt man die Differenzierbarkeit von R(t) voraus, so konvergiert
λˆ (t ) für N → ∞ und dt → 0 gegen die Ausfallrate
λ (t ) = −
24
dR(t ) / dt
R (t )
Gilt nur unter der Voraussetzung, dass alle Einheiten die gleiche R(t) haben.
Seite 81
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Diese Gleichung zeigt, dass die Zuverlässigkeitsfunktion vollständig von der Ausfallrate bestimmt ist. Mit R(0) = 1 ergibt sich damit
t
R(t ) = e
− λ ( x ) dx
0
Trifft man die zusätzliche Annahme, dass die Ausfallrate als konstant angenommen
werden kann, dann erhält man die Zuverlässigkeitsfunktion zu
R(t ) = e − λt
Allgemein wird der Mittelwert der ausfallfreien Arbeitszeiten als MTTF bezeichnet
und errechnet sich aus
∞
MTTF = E[τ ] = R(t )dt
0
Nimmt man wiederum eine konstante Ausfallrate λ an, so gilt
∞
MTTF = e −λt dt =
0
1
λ
In diesem Fall kann man auch die MTBF=1/λ setzten. Daraus folgt, dass die Verwendung von MTBF nur für Systeme mit konstanter Ausfallrate sinnvoll ist. Im Gegensatz dazu ist für die MTTF nicht interessant, was nach dem Ausfall mit der Einheit
passiert, allerdings wird im Falle der Reparierbarkeit angenommen, dass die Einheit
danach wieder neuwertig ist.
5.1.4 Verfügbarkeit25
Unter Verfügbarkeit versteht man ein Maß dafür, dass eine Einheit zu einem gegebenen Zeitpunkt funktionstüchtig ist. Neben der Zuverlässigkeit hängt die Verfügbarkeit auch noch von der Instandhaltbarkeit sowie von logistischer Unterstützung und
menschlichen Faktoren ab. Dabei versteht man unter Instandhaltbarkeit die Möglichkeit der Wiederherstellung eines Systems in den Sollzustand. Es sind also gewisse
logistische Schritte notwendig um das System in einem betriebsfähigen Zustand zu
halten.
25
auch als Availability bezeichnet
Seite 82
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Die Verfügbarkeit A(t) eines Systems ist also die Wahrscheinlichkeit, dass ein System über einen gewissen Beobachtungszeitraum funktioniert.
Zu Beginn ist die Verfügbarkeit meist 1 , nach genügend langer Zeit stellt sich das
Gleichgewicht
A=
MTBF
MTBF + MTTR
ein.
5.1.5 Sicherheit26
Bei der Sicherheit geht es darum, zu betrachten, ob ein System seine Umwelt gefährden kann. Dabei muss unterschieden werden, wie die Sicherheit im Falle eines
funktionierenden Systems aussieht (Gegenstand der Unfallverhütung), sowie im Falle eines Teil- oder Vollausfalls der Einheit (Gegenstand der technischen Sicherheit).
Ein wichtiger Begriff in diesem Zusammenhang sind Failsafe–Systeme. Hierbei geht
es darum, dass ein System bei Ausfall in einen sicheren Zustand gebracht wird, um
Schaden zu vermeiden.
5.1.6 Qualität
Die Qualität ist ein sehr allgemeiner Begriff, der angibt, inwieweit ein System die Eigenschaften hat, eine gegebene Aufgabe zu erfüllen. Damit werden sowohl objektive
Eigenschaften eines Systems (eines Produktes) beschrieben als auch subjektive Eigenschaften. Somit umschreibt die Qualität ein sehr weites Spektrum an Systemeigenschaften.
26
auch Safety
Seite 83
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
5.2 NMR-Systeme
Bis jetzt wurde jeweils die Zuverlässigkeit eines Systems, speziell von Parallelsystemen, in bezug auf die Funktionsfähigkeit betrachtet. Dies ist jedoch bei Gesamtsystemen oft nicht relevant. Hier interessiert die Zuverlässigkeit des Systems, wenn
noch eine bestimmte Anzahl von Teilsystemen funktionstüchtig ist.
5.2.1 Funktion
Eingang
Teilsystem
1
Teilsystem
2
Teilsystem
M
Voter
Ausgang
Durch die mehrfache Auslegung von Systemkomponenten wird versucht, den Ausfall
einer oder mehrerer Komponenten zu kompensieren. Die
fehlerhaften
Komponenten
werden durch eine Mehrheitsbildung aller Komponenten ausmaskiert. Zu dieser
Mehrheitsbestimmung
wird
ein sogenannter Voter verwendet. Der prinzipielle Auf-
bau eines NMR-Systems
kann aus Abb. 5.3 entnommen werden. Solange nur eine bestimmte Anzahl von
Systemergebnissen abweicht (also fehlerhaft ist), können diese Ergebnisse ausmaskiert werden. Dazu sollte die Anzahl der parallel verwendeten Teilsysteme eine ungerade Anzahl sein. Damit lässt sich jederzeit eine Mehrheitsentscheidung treffen.
Abb. 5.3 : Aufbau eines NMR Systems
Ein weiterer wichtiger Punkt ist, dass die einzelnen Teilsysteme zwar gleich aufgebaut sein können, dies allerdings nicht zwingend notwendig ist. So ist es durchaus
sinnvoll, ein Teilsystem durch Hardwarekomponenten aufzubauen, während ein anderes Teilsystem die gleiche Funktion durch Software realisiert. Durch einen solchen
hybriden Aufbau können gewisse Fehlerarten (Programmfehler, Überspannungen)
wirkungsvoll ausmaskiert werden.
Seite 84
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
5.2.2 Zuverlässigkeit des Systems
Setzt man den Voter als ideal voraus, so ergibt sich für die Berechnung der Zuverlässigkeit aus den vorigen Kapiteln
R=
R t
M
i= N
M
⋅ p M − i ⋅ qi
i
1
0.8
0.6
0.4
0.2
5 von 9
1 von 1
2 von 3
0.5
1
1.5
2
2.5
3
3.5
t
wobei p die Ausfallwahrscheinlichkeit und q die
Funktionswahrscheinlichkeit mit q=1-p darstellt. Die
Darstellung Abb. 5.4 zeigt
deutlich die unterschiedlichen Auswirkungen auf die
Zuverlässigkeit.
Der Funktionsverlauf von
einem 1-von-1 System ist
aufgrund der vorangegangenen Kapitel nicht weiter bemerkenswert. Bei redundanten Systemen zeigt sich jedoch nach einer zunächst höheren Zuverlässigkeit mit steigendem t ein starkes Abfallen der Zuverlässigkeit. Dies kommt dadurch zustande, dass auch nach einer kurzen Zeit eine endliche Wahrscheinlichkeit besteht, dass mehr als N Komponenten
ausfallen. Ab einem bestimmten Zeitpunkt (liegt bei λt = ln(2)) werden damit Simplexsysteme prinzipiell zuverlässiger.
Abb. 5.4
idente pi
:
Zuverlässigkeit
von
NMR
Systemen
für
5.2.3 Voter
S1
S
2
TS1
TS2
K
Wie bereits aus der Funktionsweise ersichtlich ist, stellt der Voter eine zentrale Komponente des NMR-Systems dar. Die Zuverlässigkeit des Voters fließt maßgeblich in die
Gesamtzuverlässigkeit des Systems ein und
sollte daher weit höher sein als die Zuverlässigkeiten der Teilsysteme.
Abb. 5.5 : Aufteilung des Voters
Seite 85
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Eine Schwierigkeit des Voters entsteht durch die Signalverzögerung, die unweigerlich durch den Entscheidungsprozeß entsteht. Besonders wenn kurze Reaktionszeiten des Systems gewünscht sind, kann dies negative Auswirkungen auf das Gesamtsystem haben.
In den meisten Fällen ist es ausreichend, den Voter als Gesamtsystem zu betrachten
und die Voterkomponente in Serie zu den Teilsystemen zu schalten. Sollte dies nicht
ausreichend sein, so kann der Voter in Entscheidungs- und Schalteinheiten aufgetrennt werden, wodurch sich natürlich auch der Einfluss auf das Gesamtsystem verändert [BIRO91]. Ein Beispiel für die getrennte Betrachtung der Voter Teilkomponenten zeigt Abb. 5.5 mit einer Kontrollkomponente K und zwei Schaltkomponenten
S1, S2.
Durch die zusätzliche Berücksichtigung des Voters ergibt sich eine Multiplikation der
Zuverlässigkeit des Systems mit der Voterzuverlässigkeit. Dadurch wird die Kurve in
Abb. 5.4 zwar gestaucht, ändert sich aber nicht in ihrer Form.
5.2.4 TMR-Systeme
TMR (Triple Modular Redundancy) - Systeme sind ein spezieller Fall von NMRSystemen, bei denen alle Systemkomponenten dreifach (M=3) ausgeführt werden.
Seite 86
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Seite 87
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
5.3 Fehlerbaumanalyse
Mit der Fehlerbaumanalyse soll die Abhängigkeit des Gesamtsystems von einzelnen
Komponenten betrachtet werden. Dabei wird ein Fehler vorgegeben, z.B. der Ausfall
eines Bauteils oder Ausfall der Spannungsversorgung, und danach berechnet, wie
sich dieser Fehler auf das Gesamtsystem auswirkt. Dazu werden alle logischen Verknüpfungen der einzelnen Komponenten dargestellt die zum Ausfall des Systems
führen können. Zur Darstellung eines Fehlerbaums werden genormte Bildzeichen
verwendet [DIN25424]. Die wichtigsten werden in Abb. 5.6 dargestellt.
Bei der Fehlerbaumanalyse geht es primär um die Identifizierung aller möglichen
Ausfallkombinationen. Dies lässt sich natürlich nur bei genauer Kenntnis des Systems erreichen, weshalb eine genaue AnaA
lyse des Systems notwendig ist.
1
Negation
E
A
&
UND
Verknüpfung
E2
-
E1
A
≥1
E2
ODER
Verknüpfung
-
E1
Standardeingang
Abb. 5.6 : Standardbildzeichen zur Fehlerbaumanalyse
Bei der Erstellung eines Fehlerbaumes gibt
es einige Dinge zu beachten, die im Folgenden kurz festgehalten werden sollen. Es wird
davon ausgegangen, dass die Ausfälle voneinander unabhängig sind, wodurch Ausfälle
mit gemeinsamer Ursache besonders berücksichtigt werden müssen.
Weiterhin sollte bei der Erstellung eines
Fehlerbaums auch der Einfluss von menschlichen Faktoren berücksichtigt werden, sofern dies nicht durch technische Maßnahmen verhindert wird.
Ein weiterer Punkt ist die Zeitabhängigkeit
von dynamischen Systemen, welche im Fehlerbaum nicht berücksichtigt wird. Sollte eine
solche dynamische Anpassung notwendig
sein, ist es oft ausreichend, die Zeitabhängigkeiten von einzelnen Komponentenzuständen zu berücksichtigen.
Zur besseren Verständlichkeit der Fehlerbaumanalyse soll im Folgenden ein System
betrachtet werden, welches als einfaches Schaltungsmodell gesehen werden kann.
Seite 88
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Das Schaltungsmodell, dargestellt als Funktionsgraph in Abb. 5.7, beschreibt die
Funktionsfähigkeit der einzelnen Komponenten anhand der Werte k1, k2 und k3.
Diese Werte sollen den Wert ´1´annehmen, falls die Komponente fehlerhaft ist, und
den Wert ´0´, falls die Komponente funktionstüchtig ist.
Betrachtet man das System unter Auslassung dieser Werte, ergibt sich folgendes
Bild:
x = (e1 ∧ e3) ∨ (e1 ∨ e2 ∨ e3) ∨ (e2 ∧ e3)
x
Daraus folgt
≥1
x = e1 ∨ e2 ∨ e3
und damit Unabhängigkeit von den
Werten k1 und k3, also auch Unabhängigkeit von der Funktionsfähigkeit dieser beiden Komponenten.
k1
k2
≥1
&
Im Folgenden soll nun dasselbe
System betrachtet werden, wobei
die Funktionsfähigkeit berücksichtigt wird. Die Berücksichtigung der
k3
&
e1
e2
e3
Funktionsfähigkeit soll so in den
Abb. 5.7 : Schaltungsbeispiel zur Fehlerbaumanalyse
Funktionsausdruck
übernommen
werden, dass in der Gesamtfunktion
ein fehlerhaftes Ausgangssignal mit
einer logischen ´1´ markiert wird und damit in die Gesamtfunktion eingeht. Damit ergibt sich für das Ausgangssignal:
x = (k1 ∨ fk 1 − Komponente) ∨ (k 2 ∨ fk 2 − Komponente) ∨ ( k 3 ∨ fk 3 − Komponente)
x = (k1 ∨ (e3 ∧ e1)) ∨ (k 2 ∨ (e1 ∨ e2 ∨ e3)) ∨ (k 3 ∨ (e2 ∧ e3))
Komponente 1
≥1
Komponente 2
Fehlerhafte
Ausgabe
Komponente 3
Abb. 5.8 : Fehlerbaum für die betrachtete Schaltung
Seite 89
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Betrachtet man dieses Ausgangssignal, bei welchem zusätzlich der Fehlerfall der
Komponenten berücksichtigt ist, so zeigt sich eine völlige Fehlerintoleranz. Denn fällt
auch nur eine einzige Komponente aus, wird eine ´1´ am Ausgang erzwungen. Damit
ergibt sich ein Fehlerbaum wie in Abb. 5.8.
Seite 90
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Seite 91
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
5.4 Standby-Systeme
Bei Standby-Systemen werden parallel zu den kritischen Komponenten redundante
Komponenten eingesetzt. Diese Systeme, bei denen die redundante Komponente
erst im Fehlerfall zugeschaltet wird, nennt man auch Systeme mit dynamischer Redundanz.
5.4.1 Funktion
Eingang
Die wichtigsten Komponenten eines
Standby-Systems erkennt man in Abb.
5.9. :
•
•
•
•
System n
System
1
Primärkomponente (System 1)
Sekundärkomponente (System n)
Fehlererkennung
Umschalter
FehlerErkennung
Ausgang
Die Primärkomponente ist jenes SysAbb. 5.9 : Komponenten eines Standbytem, welches die Funktion realisiert und
Systems
bis zum Ausfall im Einsatz ist. Wenn die
Fehlererkennung den Ausfall bzw. die
Fehlfunktion der Primärkomponente erkennt, wird durch den Umschalter auf die Sekundärkomponente(n) umgeschaltet.
Je nach Zustand der Sekundärkomponente unterscheidet man zwischen ColdStandby und Hot-Standby, welche im Folgenden betrachtet werden sollen.
5.4.2 Cold-Standby
Im Falle von Cold-Standby Systemen bleibt die Sekundärkomponente solange deaktiviert, bis die Primärkomponente ausfällt. Die Zuverlässigkeit des Sekundärsystems
kann zum Zuschaltzeitpunkt als ideal angesehen werden. Damit werden allerdings
Alterung, Korrosion und ähnliche Effekte außer acht gelassen.
Weiterhin ist zu beachten, dass die Aktivierung der Sekundärkomponente einige Zeit
in Anspruch nehmen kann, wodurch sich die Umschaltzeit entsprechend verlängert.
Eine Möglichkeit zur Reduzierung der Umschaltzeit besteht in einer sehr frühen Erkennung des Fehlerzustandes.
Es soll nun die Zuverlässigkeit von Cold-Standby Systemen betrachtet werden.
Seite 92
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Solange die Primärkomponente aktiv ist, bleibt die Sekundärkomponente deaktiviert.
Beim Ausfall der Primärkomponente übernimmt die Sekundärkomponente. Da die
Sekundärkomponente bis dahin deaktiviert war, hat sie bis zum Ausfall der Primärkomponente eine Zuverlässigkeit von R=1.
Wie bereits zuvor betrachtet, können wir für die Zuverlässigkeit eines Einzelsystems
R(t ) = e − λ .t
ansetzen.
Betrachten wir nun ein Cold-Standby System mit einer Sekundärkomponente. Zusätzlich zur Zuverlässigkeit des Einzelsystems addiert sich der Term
t
f1 (τ ) ⋅ R (t − τ ) ⋅ dτ .
(Gl. 5.1)
0
wobei die Ausfalldichte der Primärkomponente f1( ) und die Zuverlässigkeit der Sekundärkomponente R(t- ) enthalten sind, wenn die Sekundärkomponente zum Zeitpunkt aktiv wird.
Die Zuverlässigkeit des Systems ergibt sich damit zu
t
t
0
0
R2 (t ) = R(t ) + f (τ ) ⋅ R(t − τ ) ⋅ dτ = e −λt + λ ⋅ e −λτ ⋅ e −λ ⋅( t −τ ) ⋅ dτ =
t
t
0
0
= e −λt + λ ⋅ e −λt ⋅ dτ = e −λt + λ ⋅ e −λt dτ = e −λt + λ ⋅ t ⋅ e −λt =
= e − λt ⋅ (1 + λ ⋅ t )
Dieses System mit Primär- und einer Sekundärkomponente wird nun insgesamt als
Primärkomponente betrachtet. Damit lässt sich ein System mit zwei Sekundärkomponenten errechnen. Für die Ausfalldichte ergibt sich
f 2 (t ) = −
[
]
dR2 (t )
= − e −λt ⋅ λ + (−λ ) ⋅ e − λt ⋅ (1 + λ ⋅ t ) = λ2 ⋅ t ⋅ e −λt
dt
und nach Einsetzen in Gl. 5.1 und Addition zu R2 ergibt sich für die Zuverlässigkeit
Seite 93
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
R3 (t ) = e
(λ ⋅ t ) 2
⋅ 1+ λ ⋅t +
2
− λt
Betrachtet man die Zuverlässigkeit für drei Sekundärkomponenten, ergibt sich
R4 (t ) = e −λt ⋅ 1 + λ ⋅ t +
(λ ⋅ t ) 2 (λ ⋅ t ) 3
+
1⋅ 2
1⋅ 2 ⋅ 3
Diese Berechnungen zeigen, dass bei der Berechnung von fi aufgrund der Ableitung
mit der Produktregel jeweils
λi ⋅ t i −1 ⋅ e − λt
(i − 1)!
übrig bleibt. Daraus ergibt sich für das Integral jeweils
(λ ⋅ t ) i ⋅ e − λt
i!
und es lässt sich eine Formel für eine beliebige Anzahl von Komponenten angeben:
R(t ) =
n −1
i =0
(λ ⋅ t ) i −λt
⋅e
i!
wobei n die Anzahl der Komponenten darstellt (Primär- und Sekundärkomponenten).
R t
1
0.8
n
5
0.6
n
3
0.4
n
0.2
n
0.5
1
2
1
1.5
2
2.5
3
3.5
Abb. 5.10 : Zuverlässigkeit bei Cold-Standby Systemen
Seite 94
t
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
5.4.3 Hot-Standby
Bei Hot-Standby Systemen sind die Sekundärkomponenten immer aktiv. Beim Ausfall der Primärkomponente wird auf die Sekundärkomponente umgeschaltet welche
den weiteren Betrieb übernimmt.
Da die einzelnen Komponenten immer im Betrieb sind, können für die Sekundärkomponenten die gleichen Ausfallraten wie für die Primärkomponente angenommen
werden. Damit lassen sich die Formeln für die Berechnung von Parallelsystemen
auch hier anwenden.
Diese Annahme berücksichtigt allerdings nicht, dass Sekundärkomponenten unter
Umständen durch den Leerlauf eine geringe Ausfallrate aufweisen als das Primärsystem. Dies kann vor allem bei mechanischen Systemen auftreten. Für solche Fälle
stellt die Vereinfachung, die hier gemacht wird, den ungünstigsten Fall dar.
Für ein Hot-Standby System mit n Komponenten und einer Zuverlässigkeit des Umschalters von Ru ergibt sich damit
[
R(t ) = Ru ⋅ 1 − (1 − e − λt ) n
]
R t
1
0.8
0.6
n
n
5
3
0.4
n
0.2
n
0.5
1
2
1
1.5
2
2.5
Abb. 5.11 : Zuverlässigkeit bei Hot-Standby Systemen
Seite 95
3
3.5
t
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
5.4.4 Fehlererkennung
Die Fehlererkennung muss sicherstellen, dass eine fehlerhafte Primärkomponente
sicher erkannt wird. Außerdem sollte die Fehlererkennung möglichst frühzeitig reagieren, um dem Sekundärsystem ausreichend Zeit zur Aktivierung zu geben.
Das System zur Fehlererkennung beeinflusst selbst die Zuverlässigkeit des Gesamtsystems durch:
•
Falschmeldungen
Ein Fehler wird gemeldet, obwohl das Primärsystem einwandfrei funktioniert.
Dies führt dazu, dass eine Sekundärkomponente aktiviert wird.
•
Unerkannte Fehler
Ein Fehler im Primärsystem wird nicht erkannt. In diesem Fall kommt es zur Ausgabe von fehlerhaften Informationen oder Produkten.
Möglichkeiten zur Fehlererkennung :
•
Überprüfung des Ausgang
Der Ausgang wird auf fehlerhafte Meldungen überwacht. Dieses Verfahren hat allerdings den Nachteil, dass der Fehler erst erkannt wird, wenn es bereits fehlerhafte Ausgangssignale gibt. Dieser fehlerhafte Ausgang fließt natürlich in die
nachfolgenden Prozesse ein.
•
Primärkomponente liefert Fehlermeldungen
Die Komponente selbst liefert ein Signal, dass es Probleme gibt. Dies kann der
Fall sein, wenn die Komponente merkt, dass zuwenig Ressourcen zur Verfügung
stehen, Pegel nicht in der Spezifikation liegen, u.s.w.
5.4.5 Umschalter
Der Umschalter hat die Aufgabe, ein funktionsfähiges System auf den Ausgang
durchzuschalten. In unseren Betrachtungen wurde der Umschalter als ideal vorrausgesetzt, da er eine weit höhere Zuverlässigkeit haben muss als die zu schaltenden
Systeme.
Seite 96
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
5.4.6 Fail-Soft-Systeme
In manchen Systemen können Funktionen im Fehlerfall von anderen Komponenten
übernommen werden. Damit werden zwar die noch vorhandenen Komponenten stärker ausgelastet aber es kommt zu keinem Funktionsverlust. Bei einer genügend redundanten Auslegung des Systems ist auch bei Ausfall einer oder mehrerer Komponenten kein Leistungseinbruch feststellbar.
Ein typisches Fail-Soft System sind Multiprozessorsysteme. Auch bei Ausfall eines
oder mehrere Prozessoren können die Prozesse noch immer von den verbleibenden
Prozessoren übernommen werden. Dazu muss allerdings sichergestellt sein, dass
die Prozesse für die anderen Prozessoren zugreifbar sind und sich der Prozess in
einem definierten Zustand befindet.
CPU 1
CPU 2
P3
P1
P4
P2
Abb. 5.12 : Multiprozessorsystem
Seite 97
CPU 3
P5
P6
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
5.4.7 Fail-Safe-Systeme
Bei Fail-Safe-Systemen werden Redundanzen nicht zur Verbesserung der Zuverlässigkeit verwendet, sondern zur Erhöhung der Sicherheit. Besonders interessant sind
solche Systeme in Umgebungen mit erhöhten Sicherheitsanforderungen.
Eingang
Funktionsgruppe
Funktionsgruppe
Ergebnisvergleich
Ausgang
Eine mögliche Realisierung eines
solchen Systems kann man aus
Abb. 5.13 entnehmen. Hierbei werden die Resultate zweier Funktionsgruppen verglichen und im Falle
einer Ungleichheit der Ausgangssignale das Gesamtsystem abgeschaltet.
Abb. 5.13 : Fail-Safe System
Um eine möglichst hohe Fehlersicherheit zu erreichen, kann der Aufwand des Systems jedoch sehr schnell unverhältnismäßig hoch werden. Deshalb ist es notwendig,
beim Design des Systems zu definieren, wie viele Fehler noch akzeptabel sind und
welcher Art die auftretenden Fehler sind. Als Maßstab dafür lässt sich beispielsweise
die Sicherheit
S = 1−
a
a+b
verwenden, wobei a die Anzahl an gefährlichen Ausfällen darstellt und b die Anzahl
an ungefährlichen Ausfällen. Eine Sicherheit von 0,99 würde also bedeuten, dass pro
100 ungefährlichen Fehlern etwa 1 gefährlicher Fehler auftritt.
Seite 98
5 Zuverlässigkeit und Sicherheit von Serien- und Parallelsystemen
Seite 99
Anhang : Literatur
Literatur
[LYN95]
Lynch, P.J.
Web Style Manual
Yale Center for Advanced Instructional Media
http://info.med.yale.edu/caim/manual/contents.html
[FCIT98]
Florida Center for Instructional Technology
University of South Florida, Tampa, Florida, USA
http://fcit.coedu.usf.edu
[NIE89]
Nielson, J. und Lyngbaeck, U.
Two field studies of hypermedia usability
University of New York, 29-30 Juni 1989
[MIL56]
Miller G.,
„The magical number seven plus or minus two : some limits on our capacity for processing information.“
Psychological Review , 60, 1956
Page 81-97
[KUHL91]
Kuhlen, Rainer
"Hypertext"
Springer Verlag,
ISBN 1991, 3-540-53566-7
[SEYM76]
Seymour, Lipschutz
„Wahrscheinlichkeitsrechnung“
McGraw-Hill, 1976
ISBN 0-07-084361-9
[BASL84]
Basler, Herbert
„Aufgabensammlung zur statistischen Methodenlehre und Wahrscheinlichkeitsrechnung“
Physica-Verlag, Würzburg1975
ISBN 3 7908 0316 2
Seite 100
Anhang : Literatur
[BASL89]
Basler, Herbert
„Grundbegriffe der Wahrscheinlichkeitsrechnung und Statistischen Methodenlehre“
Physica-Verlag, Heidelberg 1989,1994
ISBN 3-7908-0785-0
[WEB92]
Weber, Hubert
"Einführung in die Wahrscheinlichkeitsrechnung und Statistik für Ingenieure"
B.G. Teubner Stuttgart 1992
ISBN 3-519-02983-9
[LEIT95]
Leitch, Roger D.
"Reliability Analysis for engineers"
Oxford University Press Inc., New York, 1995
ISBN 0 19 856372 8
[HERZ92]
Herz, Raimund; Hans Georg Schlichter; Wilfried Siegener
"Angewandte Statistik für Verkehrs- und Regionalplaner"
Werner-Verlag GmbH, Düsseldorf, 1992
ISBN 3-8041-1971-9
[MESS77]
Messerschmitt-Bölkow-Blohm
"Technische Zuverlässigkeit"
Springer-Verlag, Berlin/Heidelberg, 1977
ISBN 0-387-05421-9
[SEYM76]
Seymour Lipschutz
"Wahrscheinlichkeitsrechnung"
McGraw-Hill Inc., 1976
ISBN 0-07-084361-9
[BRON97]
Bronstein, Semendjajew, Musiol, Mühlig
"Taschenbuch der Mathematik"
Verlag Harri deutsch, Frankfurt am Main, 1997
ISBN 3-8171-2003-6
[BIRO91]
Birolini, Alessandro
„Qualität und Zuverlässigkeit technischer Systeme“
Springer Verlag,
ISBN 3-540-54067-9
Seite 101
Anhang : Literatur
[LOTH99]
Sachs, Lothar
“Angewandte Statistik”
Springer Verlag,
ISBN 3-540-65371-6
Seite 102
Anhang : Literatur
Seite 103
Anhang : Dokumentation
Dokumentation
Im folgenden die Dokumentation der “Monte Carlo” Simulation. Diese Dokumentation
soll beim Verständnis der verwendeten Klassen und Methoden helfen. Aufgrund der
universellen Einsetzbarkeit der Software ist die Dokumentation in englischer Sprache
verfasst.
Ein großer Teil der Dokumentation ist aus Gründen der besseren Lesbarkeit bereits
direkt im Sourcecode vorhanden. Der folgende Auszug wurde mit „javadoc“ realisiert,
welches Bestandteil des „Java Development Kit“ ist.
Die Erstellung der Dokumentation erfolgt durch folgenden Kommandozeilenaufruf :
C:> javadoc –private *.java
Der wichtigste Teil der Software befindet sich in der Klasse „GlobalPanel“ und ist in
der Funktion „Computation“ enthalten. Hier erfolgt die Berechnung der Verteilung des
angegebenen Systems.
Seite 104
Anhang : Dokumentation
5.5 Class Hierarchy
Die einzelnen Klassen und deren hierarchische Einordnung :
o
o
class java.lang.Object
class java.awt.Component (implements java.awt.image.ImageObserver, java.awt.MenuContainer, java.io.Serializable)
o class java.awt.Canvas (implements javax.accessibility.Accessible)
o class DistCanvas (implements java.awt.event.MouseListener,
java.awt.event.MouseMotionListener)
o class MyCanvas (implements java.awt.event.MouseListener, java.awt.event.MouseMotionListener)
o class java.awt.Container
o class java.awt.Panel (implements javax.accessibility.Accessible)
o class DistriPanel (implements
java.awt.event.ActionListener,
java.awt.event.FocusListener)
o class GlobalPanel (implements
java.awt.event.ActionListener,
java.awt.event.FocusListener)
o class LocalPanel (implements
java.awt.event.ActionListener,
java.awt.event.FocusListener)
o class java.awt.Window (implements javax.accessibility.Accessible)
o class java.awt.Frame (implements java.awt.MenuContainer)
o class DistributionScreen (implements
java.awt.event.WindowListener)
o class HelpScreen (implements
java.awt.event.WindowListener)
o class InfoScreen (implements
java.awt.event.WindowListener)
o class MonteCarlo (implements
java.awt.event.ActionListener,
java.awt.event.ComponentListener,
java.awt.event.KeyListener, java.awt.event.WindowListener)
Seite 105
Anhang : Dokumentation
5.6 Class DistCanvas
Constructor Detail
DistCanvas
public DistCanvas(DistributionScreen parent,
int x,
int y)
DistCanvas is responsible for displaying the main window of Monte Carlo
Parameters:
parent - The main screen
x - The width of the canvas
y - The heigth of the canvas
Method Detail
paint
public void paint(java.awt.Graphics g)
The display of the distribution values
Overrides:
paint in class java.awt.Canvas
Parameters:
g - Reference to Graphics
mouseClicked
public void mouseClicked(java.awt.event.MouseEvent e)
Specified by:
mouseClicked in interface java.awt.event.MouseListener
mousePressed
public void mousePressed(java.awt.event.MouseEvent e)
Specified by:
mousePressed in interface java.awt.event.MouseListener
mouseReleased
public void mouseReleased(java.awt.event.MouseEvent e)
Specified by:
mouseReleased in interface java.awt.event.MouseListener
Seite 106
Anhang : Dokumentation
mouseEntered
public void mouseEntered(java.awt.event.MouseEvent e)
Specified by:
mouseEntered in interface java.awt.event.MouseListener
mouseExited
public void mouseExited(java.awt.event.MouseEvent e)
Specified by:
mouseExited in interface java.awt.event.MouseListener
mouseMoved
public void mouseMoved(java.awt.event.MouseEvent e)
Specified by:
mouseMoved in interface java.awt.event.MouseMotionListener
mouseDragged
public void mouseDragged(java.awt.event.MouseEvent e)
Specified by:
mouseDragged in interface java.awt.event.MouseMotionListener
Seite 107
Anhang : Dokumentation
5.7 Class MyCanvas
Constructor Detail
MyCanvas
public MyCanvas(int x,
int y)
Definition of the initial values
Parameters:
x - The width of the canvas
y - The height of the canvas
Method Detail
paint
public void paint(java.awt.Graphics g)
The display of the elements and the nodes
Overrides:
paint in class java.awt.Canvas
Parameters:
g - Refering to the Graphics object
mouseClicked
public void mouseClicked(java.awt.event.MouseEvent e)
Specified by:
mouseClicked in interface java.awt.event.MouseListener
mousePressed
public void mousePressed(java.awt.event.MouseEvent e)
Mouse is pressed = set a new anchor to the next available point in the raster
Specified by:
mousePressed in interface java.awt.event.MouseListener
mouseReleased
public void mouseReleased(java.awt.event.MouseEvent e)
Mouse is released = The element have to be placed and/or connected to others
Specified by:
mouseReleased in interface java.awt.event.MouseListener
Parameters:
Seite 108
Anhang : Dokumentation
e - MouseEvent
mouseEntered
public void mouseEntered(java.awt.event.MouseEvent e)
Specified by:
mouseEntered in interface java.awt.event.MouseListener
mouseExited
public void mouseExited(java.awt.event.MouseEvent e)
Specified by:
mouseExited in interface java.awt.event.MouseListener
mouseMoved
public void mouseMoved(java.awt.event.MouseEvent e)
Specified by:
mouseMoved in interface java.awt.event.MouseMotionListener
mouseDragged
public void mouseDragged(java.awt.event.MouseEvent e)
Mouse is dragged, so the current position is changing and the window is redrawn
Specified by:
mouseDragged in interface java.awt.event.MouseMotionListener
existingNode
public int existingNode(int x,
int y)
Checking for an existing node and return the number of the node if available
Parameters:
x - X coordinate of the node to check
y - Y coordiante of the node to check
Returns:
return -1 Not existing otherwise the number of the node
setValueNode
public void setValueNode(double value)
Set the reliability of the currently active node
Parameters:
Seite 109
Anhang : Dokumentation
value - Value which becomes the reliability of the active node
getValueNode
public double getValueNode()
Get the reliability of the currently active node
Returns:
Reliability of the active node
nextLine
public void nextLine()
Switch to the next line in a round robin fashion Line number -1 is the "null" line
= not assigned
initNodes
public void initNodes()
Initialize all nodes and set them to inactive (=0), except the IN node (=1)
Seite 110
Anhang : Dokumentation
5.8 Class DistriPanel
Constructor Detail
DistriPanel
public DistriPanel(DistributionScreen parent,
DistCanvas canvaslink)
The panel for displaying the distribution of the calculated value
Parameters:
parent - The distribution screen
canvaslink - The canvas which is related to the panel
Method Detail
getInsets
public java.awt.Insets getInsets()
Overrides:
getInsets in class java.awt.Container
focusGained
public void focusGained(java.awt.event.FocusEvent e)
Specified by:
focusGained in interface java.awt.event.FocusListener
focusLost
public void focusLost(java.awt.event.FocusEvent e)
Specified by:
focusLost in interface java.awt.event.FocusListener
actionPerformed
public void actionPerformed(java.awt.event.ActionEvent e)
Refresh the window if a new value is entered in the global panel Check if the
value is valid
Specified by:
actionPerformed in interface java.awt.event.ActionListener
paint
public void paint(java.awt.Graphics g)
Overrides:
Seite 111
Anhang : Dokumentation
paint in class java.awt.Container
5.9 Class GlobalPanel
Constructor Detail
GlobalPanel
public GlobalPanel(MonteCarlo parent,
MyCanvas canvaslink)
The global panel is responsible for the display of all parameters related to the
whole software
Parameters:
parent - Reference to the main MonteCarlo Class
canvaslink - Reference to the related canvas
Method Detail
getInsets
public java.awt.Insets getInsets()
Overrides:
getInsets in class java.awt.Container
focusGained
public void focusGained(java.awt.event.FocusEvent e)
Specified by:
focusGained in interface java.awt.event.FocusListener
focusLost
public void focusLost(java.awt.event.FocusEvent e)
Specified by:
focusLost in interface java.awt.event.FocusListener
actionPerformed
public void actionPerformed(java.awt.event.ActionEvent e)
Specified by:
actionPerformed in interface java.awt.event.ActionListener
Seite 112
Anhang : Dokumentation
paint
public void paint(java.awt.Graphics g)
Overrides:
paint in class java.awt.Container
Computation
public void Computation()
Computes the statistical values The calculation is using a random function to
simulate working and not working nodes All possible constellations are calculated with this random values
Seite 113
Anhang : Dokumentation
5.10 Class LocalPanel
Constructor Detail
5.10.1 LocalPanel
public LocalPanel(MonteCarlo parent,
MyCanvas canvaslink)
The local panel is used for all parameters refering to one element
Parameters:
frame - MonteCarlo frame it is belonging to
proba - Propability of this element
nextelement canvas - Canvas it is belonging to
Method Detail
getInsets
public java.awt.Insets getInsets()
Overrides:
getInsets in class java.awt.Container
focusGained
public void focusGained(java.awt.event.FocusEvent e)
Specified by:
focusGained in interface java.awt.event.FocusListener
focusLost
public void focusLost(java.awt.event.FocusEvent e)
Specified by:
focusLost in interface java.awt.event.FocusListener
actionPerformed
public void actionPerformed(java.awt.event.ActionEvent e)
Specified by:
actionPerformed in interface java.awt.event.ActionListener
Seite 114
Anhang : Dokumentation
5.11 Class DistributionScreen
Constructor Detail
DistributionScreen
public DistributionScreen(GlobalPanel parent,
java.lang.String title)
Displays the distribution of the calculated value
Parameters:
parent - Reference to the global panel
title - Title of the window
Method Detail
getInsets
public java.awt.Insets getInsets()
Overrides:
getInsets in class java.awt.Container
windowOpened
public void windowOpened(java.awt.event.WindowEvent e)
Specified by:
windowOpened in interface java.awt.event.WindowListener
windowActivated
public void windowActivated(java.awt.event.WindowEvent e)
Specified by:
windowActivated in interface java.awt.event.WindowListener
windowDeactivated
public void windowDeactivated(java.awt.event.WindowEvent e)
Specified by:
windowDeactivated in interface java.awt.event.WindowListener
windowIconified
public void windowIconified(java.awt.event.WindowEvent e)
Specified by:
windowIconified in interface java.awt.event.WindowListener
Seite 115
Anhang : Dokumentation
windowDeiconified
public void windowDeiconified(java.awt.event.WindowEvent e)
Specified by:
windowDeiconified in interface java.awt.event.WindowListener
windowClosing
public void windowClosing(java.awt.event.WindowEvent e)
Specified by:
windowClosing in interface java.awt.event.WindowListener
windowClosed
public void windowClosed(java.awt.event.WindowEvent e)
Specified by:
windowClosed in interface java.awt.event.WindowListene
Seite 116
Anhang : Dokumentation
5.12 Class HelpScreen
Constructor Detail
HelpScreen
public HelpScreen(java.lang.String title)
HelpScreen displays the help screen with the documentation of the functions
Parameters:
title - Title of the Help Window
Method Detail
getInsets
public java.awt.Insets getInsets()
Overrides:
getInsets in class java.awt.Container
windowOpened
public void windowOpened(java.awt.event.WindowEvent e)
Specified by:
windowOpened in interface java.awt.event.WindowListener
windowActivated
public void windowActivated(java.awt.event.WindowEvent e)
Specified by:
windowActivated in interface java.awt.event.WindowListener
windowDeactivated
public void windowDeactivated(java.awt.event.WindowEvent e)
Specified by:
windowDeactivated in interface java.awt.event.WindowListener
windowIconified
public void windowIconified(java.awt.event.WindowEvent e)
Specified by:
windowIconified in interface java.awt.event.WindowListener
Seite 117
Anhang : Dokumentation
windowDeiconified
public void windowDeiconified(java.awt.event.WindowEvent e)
Specified by:
windowDeiconified in interface java.awt.event.WindowListener
windowClosing
public void windowClosing(java.awt.event.WindowEvent e)
Specified by:
windowClosing in interface java.awt.event.WindowListener
windowClosed
public void windowClosed(java.awt.event.WindowEvent e)
Specified by:
windowClosed in interface java.awt.event.WindowListener
Seite 118
Anhang : Dokumentation
5.13 Class InfoScreen
Constructor Detail
InfoScreen
public InfoScreen(java.lang.String title)
Diplays some information about the software, like version and developer
Parameters:
title - Title of the Information window
Method Detail
windowOpened
public void windowOpened(java.awt.event.WindowEvent e)
Specified by:
windowOpened in interface java.awt.event.WindowListener
windowActivated
public void windowActivated(java.awt.event.WindowEvent e)
Specified by:
windowActivated in interface java.awt.event.WindowListener
windowDeactivated
public void windowDeactivated(java.awt.event.WindowEvent e)
Specified by:
windowDeactivated in interface java.awt.event.WindowListener
windowIconified
public void windowIconified(java.awt.event.WindowEvent e)
Specified by:
windowIconified in interface java.awt.event.WindowListener
windowDeiconified
public void windowDeiconified(java.awt.event.WindowEvent e)
Specified by:
windowDeiconified in interface java.awt.event.WindowListener
Seite 119
Anhang : Dokumentation
windowClosing
public void windowClosing(java.awt.event.WindowEvent e)
Specified by:
windowClosing in interface java.awt.event.WindowListener
windowClosed
public void windowClosed(java.awt.event.WindowEvent e)
Specified by:
windowClosed in interface java.awt.event.WindowListener
Seite 120
Anhang : Dokumentation
5.14 Class MonteCarlo
Constructor Detail
MonteCarlo
public MonteCarlo()
Drawing the main window and handling the events The definition of the layout
of the window and the menu structure is defined
Parameters:
void -
Method Detail
main
public static void main(java.lang.String[] args)
Creating the window for the Monte Carlo simulation
Parameters:
args - Per default no information is delivered to the application
Returns:
void
getInsets
public java.awt.Insets getInsets()
Overrides:
getInsets in class java.awt.Container
keyReleased
public void keyReleased(java.awt.event.KeyEvent e)
Specified by:
keyReleased in interface java.awt.event.KeyListener
keyPressed
public void keyPressed(java.awt.event.KeyEvent e)
Specified by:
keyPressed in interface java.awt.event.KeyListener
keyTyped
public void keyTyped(java.awt.event.KeyEvent e)
Seite 121
Anhang : Dokumentation
Specified by:
keyTyped in interface java.awt.event.KeyListener
windowOpened
public void windowOpened(java.awt.event.WindowEvent e)
Specified by:
windowOpened in interface java.awt.event.WindowListener
windowActivated
public void windowActivated(java.awt.event.WindowEvent e)
Specified by:
windowActivated in interface java.awt.event.WindowListener
windowDeactivated
public void windowDeactivated(java.awt.event.WindowEvent e)
Specified by:
windowDeactivated in interface java.awt.event.WindowListener
windowIconified
public void windowIconified(java.awt.event.WindowEvent e)
Specified by:
windowIconified in interface java.awt.event.WindowListener
windowDeiconified
public void windowDeiconified(java.awt.event.WindowEvent e)
Specified by:
windowDeiconified in interface java.awt.event.WindowListener
windowClosing
public void windowClosing(java.awt.event.WindowEvent e)
Specified by:
windowClosing in interface java.awt.event.WindowListener
windowClosed
public void windowClosed(java.awt.event.WindowEvent e)
Specified by:
windowClosed in interface java.awt.event.WindowListener
Seite 122
Anhang : Dokumentation
componentMoved
public void componentMoved(java.awt.event.ComponentEvent e)
Specified by:
componentMoved in interface java.awt.event.ComponentListener
componentResized
public void componentResized(java.awt.event.ComponentEvent e)
Specified by:
componentResized in interface java.awt.event.ComponentListener
componentHidden
public void componentHidden(java.awt.event.ComponentEvent e)
Specified by:
componentHidden in interface java.awt.event.ComponentListener
componentShown
public void componentShown(java.awt.event.ComponentEvent e)
Specified by:
componentShown in interface java.awt.event.ComponentListener
actionPerformed
public void actionPerformed(java.awt.event.ActionEvent e)
Performing actions depending on the menu and window events
Specified by:
actionPerformed in interface java.awt.event.ActionListener
Parameters:
e - ActionEvent
Seite 123
DANKSAGUNG
Für die Möglichkeit diese Arbeit zu realisieren, möchte ich meinen
Eltern danken. Besonders meiner Mutter, Elfriede Prankl, für ihren
unerschütterlichen Optimismus.