Vorlesung 10.05 ohne Animation zum Ausdrucken
Werbung

Graphexploration
Elmar Langetepe
University of Bonn
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
1
Wiederholung: Eingeschränkte Graphexploration!
1. Roboter an einer Leine der Länge l = (1 + α)r (ein Stromkabel).
2. Roboter muss nach 2(1 + α)r Schritten zum Startpunkt
zurückkehren (Akku nachzuladen).
3. Großer Graph nur bis zur Tiefe d erkunden. Später mit
fortschreitender Tiefe.
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
2
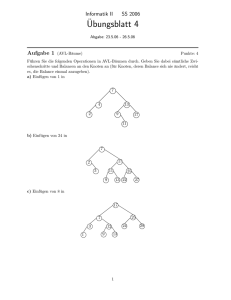
Wiederholung: CFS Algorithmus!
V. Spanning Tree, neuer Tree!
VI. Fertig! Entfernen!
T0
T1
III. DFS in Rest T2! entfernen!
IV. bDFS starten
II. Pruning: (2,4), neuer Tree
Tw
w
s1
T2
s2
I. Auswahl next!
s3
s
T3
{T1, T2, T3}
Online Bewegungsplanung
{Tw , T 0, T3}
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
3
Wiederholung: Invarianten Lemma 1.25
Im CFS–Algorithmus gelten folgende Invarianten
i) Jeder unvollständig explorierte Knoten gehört zu Baum aus T .
ii) Es existiert stets ein unvollständig explorierter Knoten v ∈ V ∗ mit
dG∗ (s, v) ≤ r, falls G∗ 6= G.
iii) Für die Startknoten si gilt: dG∗ (s, si) ≤ r.
iv) Restbaum von Ti wird mit DFS vollständig erkundet, alle Bäume
4|TR |
.
r
≤
T ∈ T haben Komp. |T | ≥ αr
4
α
v) Alle Bäume T ∈ T sind disjunkt!
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
4
Wiederholung Analyse Theorem 1.26/Korollar 1.27
CFS–Algorithmus mit bekannter Tiefe r ist (4 + α8 )–kompetitiv/hat
Kosten Θ(|E| + |V |/α).
über Teilbäume TR
•
•
•
•
Teilbaum TR, Kosten
K1(TR): Weg von s nach si in G∗
K2(TR): DFS, K3(TR): bDFS (Graph!)
P
K3(TR) ≤ 2 · |E| bDFS global
TR
P
P
•
K2(TR) = 2 · |TR| ≤ 2 · |E|, DFS, disjunkt
TR
TR
P
P
P
8
•
K1(TR) ≤ 2r ≤ α |TR| ≤ α8 |E|
TR
Online Bewegungsplanung
TR
TR
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
5
Unbekannter Graph!
•
•
•
•
•
•
•
Annahme: Die Tiefe des Graphen sei unbekannt!
Einfache nützliche Heuristik: Sukzessive r verdoppeln
Solange bis r ausreicht!
Starte mit r0 = 2, ≈ log2 r Aufrufe
Also insgesamt O(log r|E|) Schritte
Re-exploration mit bDFS vermeiden
O(|E| + log r|V |) viele Schritte, Korollar 1.28
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
6
Unbekannter Radius, verbesserter Ansatz!
•
•
•
•
Nur Anpassungen im Pruning und Explore Schritt
Tiefen und Leine nach Gegebenheit anpassen: dG∗ (s, si) als r0
8
Verfahren bleibt bei Kosten: 2 + α 2|V | + 2|E|
αr
,
prune(Ti, si, αr
4
2 )
αd
(s,s )
9αd
(s,s )
i
G∗
)
• Ersetzen durch: prune(Ti, si, G∗4 i ,
16
• explore( T , Ti, si, (1 + α)r )
• Ersetzen durch: explore( T , Ti, si, (1 + α)dG∗ (s, si) )
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
7
dG∗ (s, si) als r0 in explore/prune
• Startproblem: dG∗ (s, si) = 0, r0 = max(dG∗ (s, si), c)
• Eigenschaften des Ansatzes Lemma 1.25
i) Jeder unvollständig explorierte Knoten gehört zu Baum aus T .
ii) Es existiert stets ein unvollständig explorierter Knoten v ∈ V ∗
mit dG∗ (s, v) ≤ r, falls G∗ 6= G.
iii) Für die Startknoten si gilt: dG∗ (s, si) ≤ r.
iv) Restbaum von Ti wird mit DFS vollständig erkundet, alle
Bäume T ∈ T haben Komp. |T | ≥ αr
4 .
v) Alle Bäume T ∈ T sind disjunkt!
• i), ii), iii) und v) gelten auch mit den neuen Aufrufen!!
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
8
Eigenschaften mit angepassten explore/prune
r0 = max(dG∗ (s, si), c) wobei dG∗ (s, si) minimal für Ti ∈ T
Lemma 1.29:
i) Jeder unvollständig explorierte Knoten gehört zu Baum aus T .
ii) Es existiert stets ein unvollständig explorierter Knoten v ∈ V ∗ mit
dG∗ (s, v) ≤ r, falls G∗ 6= G.
iii) Für Startknoten si gilt: dG∗ (s, si) ≤ r.
iv) Restbaum von Ti wird mit DFS vollständig erkundet, alle Bäume
max(dG∗ (s,T ),c)α
T ∈ T haben Komp. |T | ≥
.
4
v) Alle Bäume T ∈ T sind disjunkt!
iv) ist noch zu zeigen!
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
9
Beweis Invariante Lemma 1.29 iv)
Restbaum von Ti wird mit DFS vollständig erkundet
Abstand dG∗ (s, si)
Besuche Knoten v in Ti
7dG∗ (s, si)α
(1 + α)dG∗ (s, si) − dG∗ (s, si) − dTi (si, v) ≥
16
da dTi (si, v) ≤
Online Bewegungsplanung
9dG∗ (s,si)α
16
wegen Pruning!
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
10
Beweis Invariante Lemma 1.29 iv)
∀T ∈ T : |T | ≥
max(dG∗ (s,T ),c)α
4
• Zu Beginn: bDFS ab dem Start, alles gesehen oder
|T | ≥ (1 + α)c > αc
4
• Sonst Ti, mit si am nächsten zu s, Ann.: dG∗ (s, Ti) > c!
d (s,T )α
• Zeigen: |Tw | ≥ G∗ 4 w
• Sei T Baum Ti nach Pruning, dG∗ (s, T ) = dG∗ (s, si)
d (s,T )α
• Pruning garantiert: |T | ≥ G∗ 4
9d (s,s )α
d (s,s )α
d (s,s )α
• Tw abgeschn. Baum: |Tw | ≥ G∗16 i − G∗ 4 i = 5 G∗ 16 i
• dG∗ (s, Tw ) ≤ dG∗ (s, si) + dG∗ (si, w) = (1 + α4 )dG∗ (s, si) <
5dG∗ (s,si)
, α < 1!
4
d (s,T )α
• Dann: |Tw | > G∗ 4 w
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
11
Beweis Invariante Lemma 1.29 iv)
∀T ∈ T : |T | ≥
max(dG∗ (s,T ),c)α
4
• Noch die neuen Spannbäume T 0 ab v im Restbaum!
9αdG∗ (s,si)
• bDFS-Bäume ab v: dG∗ (si, v) ≤
16
25dG∗ (s,si)
• dG∗ (s, T 0) ≤ dG∗ (s, si) + dG∗ (si, v) <
16
•
•
•
•
16dG∗ (s,T 0)
25
dG∗ (s, si) >
T 0 unvollständig
9αdG∗ (s,si)
dT (si, v) ≤
16
7αdG∗ (s,si)
Noch
Restkabel
16
0
• |T | ≥
7αdG∗ (s,si)
16
>
7αdG∗ (s,T 0)
25
>
dG∗ (s,T 0)α
4
0
• Entweder alles gesehen oder Spannbaum |T | >
• Alle T ∈ T betrachtet
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 dG∗ (s,T 0)α
4
SS ’10
12
Analyse Theorem 1.30
CFS–Algorithmus zur eingeschränkten Graphenexploration ohne
bekannte Tiefe ist (4 + α8 )–kompetitiv für 0 < α < 1.
Teilbaum TR
•
•
•
•
•
Teilbaum TR, Kosten
K1(TR): Weg von s nach si in G∗
K2(TR): Exploration mit DFS
K3(TR): bDFS von unvollst. expl. Knoten aus (Graph!)
P
K3(TR) ≤ 2 · |E|, da bDFS nur unexplorierte Kanten besucht
TR
P
P
•
K2(TR) = 2 · |TR| ≤ 2 · |E|, die bekannten Kosten DFS
TR
Online Bewegungsplanung
TR
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
13
Analyse Theorem 1.30
• Teilbaum TR, Kosten
• K1(TR): Weg von s nach si in G∗
• K1(TR) = 2 · dG∗ (s, si) ≤ 8|TαR|
d
(s,T )α
d
(s,s )α
• |TR| ≥ G∗ 4 R = G∗ 4 i , Lemma 1.29 iv)
P
P
P
8
K1(TR) ≤ 2dG∗ (s, si) ≤ α |TR| ≤ α8 |E|
•
TR
TR
TR
• 2 · |E| + 2 · |E| + α8 |E| gegenüber E
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
14
Korollar 1.31
CFS–Algorithmus zur eingeschränkten Graphenexploration ohne
bekannte Tiefe benötigt Θ(|E| + |V |/α) Schritte für 0 < α < 1.
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
15
Notwendigkeit von Vorausschau α
3
2
Untere Schranke Ω(|E| ) für Offline Akku-Variante!
•
•
•
•
2r reichen gar nicht! Mind. 2r + 1!
Mit 2r + o(r) nicht effizient! (Klein-o Notation!)
Graph mit Pfad und Clique:
von Linear!
3 Oberhalb
Akkugröße n + f (n): Ω fn(n) Schritte!
• Vermutung: r + o(r) reicht für Leine nicht! Offen!!
S
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
16
Notwendigkeit von Vorausschau α
Lemma 1.32 Die Akku-Variante benötigt mit einem Akku der Größe
3
2r + o(r) mindestens Ω(|E| 2 ) Schritte.
Achtung: Kompetitiv kann das trotzdem sein!
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
17
Offline Kosten?
•
•
•
•
•
•
•
Mechanical cost/Computational cost
Spannbäume aufbauen
Kürzeste Wege zu den Baumwurzeln
Verschmelzen der Bäume
DFS/bDFS
Alles linear?
Übung
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
18
Anderes Modell!
•
•
•
•
•
•
•
Bislang Knoten/Kanten wurden beschriftet
Kann man als Landmarks verwenden
Annahme: Das geht gar nicht! Wie unterscheiden?
Knoten nicht unterscheidbar!
Lokale Ordnung der Kanten am Knoten gegeben
Muss nicht mit Einbettung übereinstimmen!
Gegeben: G = (V, E, S), S cyclic orders!
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
19
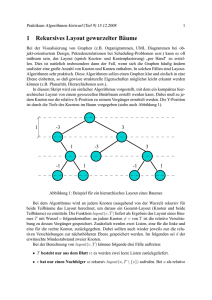
Anderes Modell! Lokale Ordnung!
e7
v5
e7
v6
v5
e8
e5
e4
v1
e11
e5
e5
e6
e6
e11
e9
v4
v1
e4
e4
e3
e3
e2
e10
v2
e3
e1
e2
v3
v2
e10
e1
e4
e9
v3
e1
Von anderem Knoten kommend! Permutation!
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
20
Das Mapping Problem!
• Bestimme den Graphen (für Navigation!)
• Bisherigen Graphen kann man sich merken!
• Ohne Marker/Pebble geht es nicht!
Online Bewegungsplanung
c Elmar Langetepe
Kapitel 1 10.05.2010 SS ’10
21