Die I2C Relaisplatine
Werbung

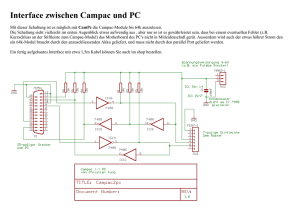
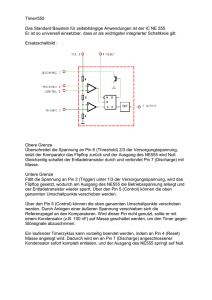
Das universelle Funkboard Unterstützt verschiedene Funkmodule und ist kinderleicht an PC oder Controllerboard´s anschließbar RN-FUNK 1.1 Dieses Board vereinfacht die Verwendung von Funkmodulen am PC oder Controller. Selbst Laien können damit sehr schnell ein Funkmodul in Betrieb setzen. Besonders einfach ist die Verbindung bei Roboternetz kompatiblen Boards. So einfach geht’s: • • • Das gewünschte Funkmodul in das Board stecken (oder einlöten) Das dreipolige RS232 Kabel (Roboternetznorm) mit PC oder einem Controller verbinden Beliebige Spannung zwischen von 5 und 16 V an die Schraubklemme anlegen Das war`s! Nun kann über die RS232.so genutzt werden als wenn ein Kabel vorhanden wäre. Daten können einfach mit Basic Print-Befehl von Controller, PC gesendet und mit entsprechenden Anweisungen empfangen werden. Die Möglichkeiten sind vielfältig. Die Fernsteuerung von Robotern, Abfragen von Sensoren, Fernsteuern von RN-Motor usw. usw. Die Reichweite hängt vom Funkmodul ab. Reichweiten von 200 bis 350m sind aber durchaus realistisch, Mit dem getestet Funk-Transceiver RT868F4 waren selbst nach 200 noch nicht die geringsten Ausfälle zu festzustellen. Aktualisiert am 28.4.06 Als hier die Leistungsmerkmale auf einen Blick: • Verschiedene Funkmodule werden unterstützt: RT868F4 FM-Mehrkansalmodul 868 Mhz (Bezug Robotikhardware.de) RT433F4 FM-Mehrkansalmodul 433 Mhz (Bezug Robotikhardware.de) EasyRadio ER400TRS 433 Mhz • Versorgungsspannung 5 bis 16 V • Direkter Anschluß an PC oder Controller (Max-Pegelwandler auf dem Board) • Auch RS232 TTL Anschluß • BNC-Anstennenstecker 50 Ohm (in der Regel reicht 8 cm Draht als Antenne) • Ein- und Ausschalter auf der Platine • Kontrolleuchte • Roboternetz-kompatibel – Das Funkmodul kann mit einem 3 poligen Kabel ganz einfach mit allen Boards aus der Roboternetz-Serie (RN-Control,RNBFRA, RN-Motor, RN-Mega8 usw.) verbunden werden. Auch das üblicher PC-Anschlußkabel paßt sofort. • Kompakte Größe (Roboternetz Mini-Norm ¼ Europakarte) • Eingangsspannung gegen Verpolung geschützt • Deutsche Doku mit Basic Programmbeispiel • Preiswerte Platine und Bausatz erhältlich – einfacher Aufbau Passende Funkmodule : Diagramm und Beschreibung der Anschlüsse Wird das Modul RT868F4 genutzt, so ist eine Betriebsspannung von 5 bis 16 V zulässig, ansonsten 5 bis 20V. Dies ist bedingt durch die verschiedenen Spannungsregler. Aufbau und Anwendung Aufbau Der Aufbau der Schaltung ist durch die vorgefertigte kleine Platine eigentlich völlig problemlos auch von Elektronik-Einsteigern zu bewerkstelligen. Durch den Bestückungsdruck und die Bestückungsliste, etwas weiter hinten in dieser Dokumentation, ist der Aufbau unkritisch. In der Regel dauert der Aufbau ca. 15 Minuten. Dennoch einige Anmerkungen zu kleinen Hürden: 1. Je nachdem welches Funkmodul eingesetzt wird, müssen einige Bauteile unbestückt bleiben. Welche Bauteile bestückt werden müssen, wird auf den nachfolgenden Seiten erläutert. 2. Die Bedienung des Funkmodules wird in der jeweiligen Anleitung zum Funkmodul beschrieben. Oft kann jedoch schon die Standard-Einstellung des Funkmodules benutzt werden. Gute Erfahrungen haben wir hier mit dem RT868F4 gemacht. Einfach Modul eingesetzt und ein Board an den Controller und ein gleiches an den PC angeschlossen und schon kann mit 9600 Baud gefunkt werden. Bei Bedarf kann mittels mitgelieferten Konfigurationsprogramm die Sendeleistung oder der Kanal gewechselt werden. 3. Wird das Modul Easyradio verwendet, so muss man bedenken das dieses Modul standardmäßig mit 19200 Baud arbeitet. Da die meisten Programme auf 9600 Baud eingestellt sind, klappt also noch nix. Also am besten Terminalprogramm erst mal auf 19200 Baud einstellen und dann durch einen Befehl auf 9600 Baud umstellen. Also daher am besten vor Inbetriebnahme in die Anleitung des Funkmodules schaun, die befindet sich unter Datenblätter auf de rrobotikhardware-CD. Man muss gewöhnlich zwei Befehle schicken "ER_CMD#U3 und ACK" , dann klappts auch mit 9600 Baud. Alternativ kann man auch ein Tool (LPRS Easy Radio 1.03.exe) zur Konfigurierung verwenden. Dieses Tool findet man auf der Robotikhardware CD im Ordner Funkmodule. . Das waren eigentlich schon die besonderen Punkte die zu beachten sind. Ansonsten natürlich sauber mit einem 15 – 25 W Lötkolben alles auf der Unterseite verlöten. Grundkenntnisse beim Löten werden empfohlen. Erläuterung der Anschlüsse, Regler und Kurzschlussbrücken AnschlussBezeichnung Erläuterung Power Spannungsversorgung Über diese Schraubklemme wird das Board mit Spannung versorgt. Es reicht eine unstabilisierte Gleichspannung von 7 bis 20V aus (max. 20V wenn ein Kühlkörper verwendet wird) + und – sind auf der Platine markiert. Das Board ist jedoch auch gegen ein verpolen geschützt, so das nichts kaputt geht! Spannung wählen Wenn ein EasyRadio-Funkmodul eingesteckt ist, dann muß ein Jumper die Kontakte 2 und 3 kurzschließen. Im anderen Falle muß der Jumper 1 und 2 verbinden. Dies muß vor der Inbetriebnahme erfolgen, weil hiermit die Spannungsstabilisierung zwischen 3 und 5V umgeschaltet wird. SLEEP Bei Verwendung des Funkmodules RT858F4 oder RT433F4 muß hier Jumper gesteckt werden damit das Modul aktiv ist. Ansonsten würde es im Sleep-Mode nur 3uA benötigen. Statt Jumper kann man hier auch einen Port anschließen (siehe Schaltplan) Baudrate Bei Verwendung des Funkmodules RT858F4 oder RT433F4 wird durch diese zwei Jumper die Baudrate festgelegt. Wird kein Jumper gesteckt, so ist diese automatisch auf 9600 Baud festgelegt (was wir empfehlen). Wird Jumper auf Nummer 2 gesteckt, so sind es 19200 Baud. Auf Stellung 3 sind es 38400 Baud. Ein- und Ausschalter Über diesen Schalter kann das ganze Board vom Netzteil getrennt werden PC kompatible RS232 Schnittstelle Über ein Adapterkabel kann die serielle Schnittstelle des PC direkt mit dem Board verbunden werden. Dies ist dann sinnvoll, wenn ein Fehler in einem Programmen gesucht wird. Einfache PRINT Anweisungen werden von einem Terminalprogramm angezeigt. Hier kann Hyperterminal von Windows oder das eingebaute Terminalprogramm von Bascom empfohlen werden. JPU JP2 BAUD S1 RS232 Die Belegung ist kompatibel zum Robotzernetz-Standard, als auch zum Conrad Roboter CCRP5: Pin 1 RX Pin 2 GND Pin 3 TX Ein geeignetes Anschlußkabel kann schnell selbst angefertigt werden oder gibt es über robotikhardware.de bereits fertig zu kaufen Natürlich kann man hier auch einen Controller mit Max-IC anschließen. Praktisch alle Roboternetz-Baords mit der genormten 3 poligen RS232! RS232 TTL RS232 Schnittstelle mit TTL Pegel Dies ist die RS232 Schnittstelle mit TTL-Pegel, also max. 5V Pegel. Hier lassen sich Controllerboards, die keinen Treiberbaustein wie Max232 besitzen, direkt anschließen Die TTL- Stiftleiste wird nach Roboternetz-Definition immer 4 polig ausgestattet um Verwechslungen mit der Standard RS232 Stiftleiste zu vermeiden. Verbinden Sie niemals eine 4 polige TTL-Stiftleiste mit einer 3 poligen, dies würde den Controller oder PC beschädigen. Die Belegung entspricht der Roboternetz-Norm: Pin 1 RX Pin 2 TX Pin 3 GND Pin 4 +5V (hier nicht benutzt/belegt) Ein geeignetes Anschlußkabel kann schnell selbst angefertigt werden. JP1 Wichtig: Wenn die TTL-Buchse benutzt wird, dann muß IC1 (MAX3232) aus der IC-Fassung genommen werden. Easy Radio Sondersignale Wird das EasyRadio Funkmodul genutzt, so können über diese Stiftleiste noch zusätzliche Signale abgefaßt werden,. Pin 1 GND Pin 2 RDY Pin 3 RSY Pin 4 RSS1 (Feldstärke) Die Signale sind in der Doku des Funkmodules ausführlich erläutert. Gewöhnlich braucht man diese nicht, jedoch muß dann ein Jumper zwischen Pin 1 und Pin 2 gesteckt werden. Bauteile Bestell- und Bestückungsliste für RN-FUNK (Angaben ohne Gewähr) Wird das Board mit dem Funkmodul RT868F4 oder RT433F4 bestückt, dann dürfen die rot markierten Bauteile nicht eingesetzt werden. Einfach weglassen. Wird das Board mit EasyRadio Funkmodul bestückt, dann dürfen die blau markierten Bauteile nicht eingesetzt werden. Stückliste Bauteil BAUD BNC1 C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 D1 D2 D3 ER1 FUNK1 IC1 IC2 IC3 JP1 JP2 JPU LED1 POWER R1 R2 R3 R4 R5 R6 RS232TTL RS232_PC1 S1 IC1 Beschreibung 2x2 Stiftleiste BNC Buchse Elko 220uF Elko 0,22uF Elko 0,22uF Elko 0,22uF Keramik Kondensator 100n Keramik Kondensator 100n Keramik Kondensator 100n Elko 100uF oder 220uF Elko 0,22uF Keramik Kondensator Elko 100uF oder 220 uF Reichelt Best.Nr. LU2,5MS2 UG 1094W1 RAD 220/35 Rad 0,22/100 Rad 0,22/100 Rad 0,22/100 KERKO100N KERKO100N KERKO100N RAD 105 220/16 Rad 0,22/100 KERKO100N RAD 105 220/16 Zehnerdiode nicht notwendig, generell unbestückt lassen Diode BYV 27/200 Zehnerdiode 3V ZD 3,0 Wahlweise Funkmodul ER400TRS Wahlweise Funkmodul RT868F4 oder RT433F4 MAX 3232 CPE MAX 3232 CPE Spannungsregler 3,3V LF 33 CV Spannungsregler 78S05 Stiftleiste 4polig LU 2,5 MS4 Stiftleiste 2polig LU2,5MS2 Stiftleiste 3polig LU2,5MS3 Leuchdiode Low LED 3MM 2MA GN Schraubklemme 2 polig AKL 101-02 Metallschichtwiderstand 10k METALL 10,0K Metallschichtwiderstand 10k METALL 10,0K Metallschichtwiderstand 10k METALL 10,0K Widerstand 330 Ohm METALL 330 Widerstand 330 Ohm METALL 330 Widerstand 330 Ohm METALL 330 Stiftleiste 4polig LU 2,5 MS4 Stiftleiste 3 polig LU 2,5 MS3 Umschalter AS500 APC Buchsenleiste BL1x10G 2,54 IC Fassung 16 polig GS16 Platine und / oder Bausatz sowie passende Funkmodule gibt es über www.robotikhardware.de Bestückungsplan ROT sind die Jumper-Grundeinstellungen markiert Jumper wenn Funkmodul RT868F4 oder RT433F4 eingesetzt wird Jumper wenn Funkmodul EasyRadio eingesetzt wird Der erste Test Nachdem Board aufgebaut ist, können wir daran gehen und das Board testen. Am einfachsten ist es Wenn Sie gleich zwei Funkmodule und Boards RN-FUNK gekauft haben. Stecken Sie in jeden BNC-Stecker einen isolierten Draht von ca 8 cm als Antenne (nach oben ausrichten) Schließen Sie eines an den PC und eines an ihren Controller an. Dann programmieren Sie einfach eine Schleife die Daten mit Print ausgibt. Bei RN-Control könnte das so aussehen: $regfile = "m32def.dat" $crystal = 16000000 'Quarzfrequenz $baud = 9600 Print Print "**** RN-CONTROL 1.4 *****" Print "Das neue Experimentier- und Roboterboard" Print "Weitere passende Zusatzboards bei www.robotikhardware.de" Print Dim T As Integer Do Print "Test Nummer " ; T T = T + 1 Wait 1 Loop Über ein Terminalprogramm müssten Sie nun diese Zahlen empfangen, so als sei das Board direkt mit der RS232 verbunden. Klappt es nicht, dann drehen Sie den dreipoligen RS232-Stecker beim Funkmodul mal um. Es schadet nix wenn Sie diesen mal falsch rum aufgesteckt haben. Wenn dieser beim Sender als auch Empfänger richtig rum ist, dann sollten Sie die Daten sehen. Nun können Sie sich mit der zu sendenden RN-Control entfernen. Sie werden überrascht sein welch hohe Reichweiten erzielt werden. Soweit war´s das. Alles andere liegt an dem Einfallsreichtum von ihnen. Sicherlich wird dazu noch das ein oder andere Programm im Roboternetz auftauchen. Sie können auch selbst dort Beispiele posten. Schaltplan Sollte in dieser Doku noch der ein oder andere Fehler drin stecken, so bitte ich um Nachsicht und Hinweise per Mail an den Entwicklers [email protected] Also immer mal im Download Bereich nach der Versionsnummer der Doku schaun, Ergänzungen sind denkbar! Der Nachbau dieses Boards ist ausdrücklich gestattet, jedoch nur für den privaten Einsatz! Die Kommerzielle bzw. Gewerbliche Verwertungen bedürfen der schriftlichen Einwilligung des Entwicklers www.robotikhardware.de Online-Bestellung von Platinen oder Erweiterungen über http://www.robotikhardware.de Anwendungsprogramme und Programmschnipsel findet man im Roboternetz-Downlodd-Bereich. Es wäre schön wenn auch Sie etwas dort uploaden könnten Haftung, EMV-Konformität Alle Teile der Schaltung wurden sorgfältigst geprüft und getestet. Trotzdem kann ich natürlich keine Garantie dafür übernehmen, daß alles einwandfrei funktioniert. Insbesondere übernehme ich keine Haftung für Schäden, die durch Nachbau, Inbetriebnahme etc. der hier vorgestellten Schaltungen entstehen. Derjenige, der den Bausatz zusammenbaut und in einem Gehäuse montiert, gilt als Hersteller und ist damit selbst für die Einhaltung der geltenden Sicherheits- und EMV-Vorschriften verantwortlich. Für Schäden die durch fehlerhaften Aufbau entstanden sind, direkt oder indirekt, ist die Haftung generell ausgeschlossen. Schadensersatzansprüche, gleich aus welchem Rechtsgrund, sind ausgeschlossen, soweit nicht vorsätzliches oder grob fahrlässiges Handeln vorliegt. Sofern wir haften, umfaßt unsere Haftung nicht solche Schäden, die nicht typischerweise erwartet werden konnten. Haftung und Schadenersatzansprüche sind auf den Auftragswert / Bauteilwert beschränkt. Bei der Lieferung von Fremdprodukten als auch Software gelten über diese Bedingungen hinaus die besonderen Lizenz- oder sonstigen Bedingungen des Herstellers. Sicherheitshinweise Beim Umgang mit Produkten, die mit elektrischer Spannung in Berührung kommen, müssen die gültigen VDE-Vorschriften beachtet werden, insbesondere VDE 0100, VDE 0550/0551, VDE 0700, VDE 0711 und VDE 0860. Vor Öffnen eines Gerätes stets den Netzstecker ziehen oder sicherstellen, daß das Gerät stromlos ist. Bauteile, Baugruppen oder Geräte dürfen nur in Betrieb genommen werden, wenn sie vorher berührungssicher in ein Gehäuse eingebaut wurden. Während des Einbaus müssen sie stromlos sein. Werkzeuge dürfen an Geräten, Bauteilen oder Baugruppen nur benutzt werden, wenn sichergestellt ist, daß die Geräte von der Versorgungsspannung getrennt sind und elektrische Ladungen, die in den im Gerät befindlichen Bauteilen gespeichert sind, vorher entladen wurden. Spannungsführende Kabel oder Leitungen, mit denen das Gerät, das Bauteil oder die Baugruppe verbunden ist, müssen stets auf Isolationsfehler oder Bruchstellen untersucht werden. Bei Feststellen eines Fehlers in der Zuleitung muß das Gerät unverzüglich aus dem Betrieb genommen werden, bis die defekte Leitung ausgewechselt worden ist. Bei Einsatz von Bauelementen oder Baugruppen muß stets auf die strikte Einhaltung der in der zugehörigen Beschreibung genannten Kenndaten für elektrische Größen hingewiesen werden. Wenn aus einer vorliegenden Beschreibung für den nichtgewerblichen Endverbraucher nicht eindeutig hervorgeht, welche elektrischen Kennwerte für ein Bauteil oder eine Baugruppe gelten, wie eine externe Beschaltung durchzuführen ist oder welche externen Bauteile oder Zusatzgeräte angeschlossen werden dürfen und welche Anschlußwerte diese externen Komponenten haben dürfen, so muß stets ein Fachmann um Auskunft ersucht werden. • Es ist vor der Inbetriebnahme eines Gerätes generell zu prüfen, ob dieses Gerät oder Baugruppe grundsätzlich für den Anwendungsfall, für den es verwendet werden soll, geeignet ist! Im Zweifelsfalle sind unbedingt Rückfragen bei Fachleuten, Sachverständigen oder den Herstellern der verwendeten Baugruppen notwendig! Bitte beachten Sie, daß Bedien- und Anschlußfehler außerhalb unseres Einflußbereiches liegen. Verständlicherweise können wir für Schäden, die daraus entstehen, keinerlei Haftung übernehmen. Bausätze sollten bei Nichtfunktion mit einer genauen Fehlerbeschreibung (Angabe dessen, was nicht funktioniert...denn nur eine exakte Fehlerbeschreibung ermöglicht eine einwandfreie Reparatur!) und der zugehörigen Bauanleitung sowie ohne Gehäuse zurückgesandt werden. Zeitaufwendige Montagen oder Demontagen von Gehäusen müssen wir aus verständlichen Gründen zusätzlich berechnen. Bereits aufgebaute Bausätze sind vom Umtausch ausgeschlossen. Bei Installationen und beim Umgang mit Netzspannung sind unbedingt die VDE-Vorschriften zu beachten. Geräte, die an einer Spannung V betrieben werden, dürfen nur vom Fachmann angeschlossen werden. In jedem Fall ist zu prüfen, ob der Bausatz für den jeweiligen Anwendungsfall und Einsatzort geeignet ist bzw. eingesetzt werden kann. Die Inbetriebnahme darf grundsätzlich nur erfolgen, wenn die Schaltung absolut berührungssicher in ein Gehäuse eingebaut ist. Sind Messungen bei geöffnetem Gehäuse unumgänglich, so muß aus Sicherheitsgründen ein Trenntrafo zwischengeschaltet werden, oder, wie bereits erwähnt, die Spannung über ein geeignetes Netzteil, (das den Sicherheitsbestimmungen entspricht) zugeführt werden. Alle Verdrahtungsarbeiten dürfen nur im spannungslosen Zustand ausgeführt werden. Derjenige, der einen Bausatz fertigstellt oder eine Baugruppe durch Erweiterung bzw. Gehäuseeinbau betriebsbereit macht, gilt nach DIN VDE 0869 als Hersteller und ist verpflichtet, bei der Weitergabe des Gerätes alle Begleitpapiere mitzuliefern und auch seinen Namen und Anschrift anzugeben. Geräte, die aus Bausätzen selbst zusammengestellt werden, sind sicherheitstechnisch wie ein industrielles Produkt zu betrachten. Betriebsbedingungen Der Betrieb der Baugruppe darf nur an der dafür vorgeschriebenen Spannung erfolgen. Bei Geräten mit einer Betriebsspannung 35 Volt darf die Endmontage nur vom Fachmann unter Einhaltung der VDE Bestimmungen vorgenommen werden. Die Betriebslage des Gerätes ist beliebig. Bei der Installation des Gerätes ist auf ausreichenden Kabelquerschnitt der Anschlußleitungen zu achten! Die angeschlossenen Verbraucher sind entsprechend den VDE Vorschriften mit dem Schutzleiter zu verbinden bzw. zu erden. Die zulässige Umgebungstemperatur (Raumtemperatur) darf während des Betriebes 0°C und 40°C nicht unter-, bzw. überschreiten. Das Gerät ist für den Gebrauch in trockenen und sauberen Räumen bestimmt. Bei Bildung von Kondenswasser muß eine Akklimatisierungszeit von bis zu 2 Stunden abgewartet werden. In gewerblichen Einrichtungen sind die Unfallverhütungsvorschriften des Verbandes der gewerblichen Berufsgenossenschaften für elektrische Anlagen und Betriebsmittel zu beachten. In Schulen, Ausbildungseinrichtungen, Hobby- und Selbsthilfewerkstätten ist das Betreiben von Baugruppen durch geschultes Personal verantwortlich zu überwachen. Betreiben Sie die Baugruppe nicht in einer Umgebung in welcher brennbare Gase, Dämpfe oder Stäube vorhanden sind oder vorhanden sein können. Falls das Gerät einmal repariert werden muß, dürfen nur Original Ersatzteile verwendet werden! Die Verwendung abweichender Ersatzteile kann zu ernsthaften Sach- und Personenschäden führen! Dringt irgendeine Flüssigkeit in das Gerät ein, so könnte es dadurch beschädigt werden. Die Funkbestimmungen und Richtlinien des Funkmodulherstellers sind zu beachten.