Skript Kapitel 3
Werbung

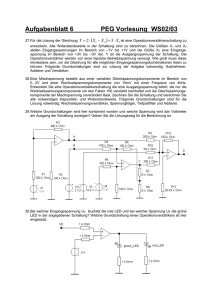
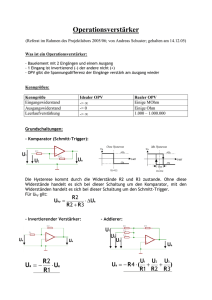
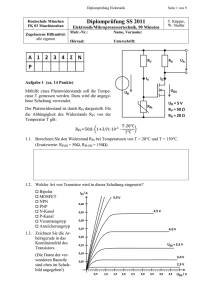
A. Thiede Elektronik für den Maschinenbau III. Analoge Schaltungen und Systeme Analoge Signale sind sowohl hinsichtlich der Zeit als auch ihres Wertes kontinuierlich, d.h. zu jedem Zeitpunkt hat das Signal einen bestimmten Wert und dieser Wert kann praktisch in einem gewissen Bereich jeden Wert annehmen. Die Signale aus der uns umgebende Realität wie z.B. Sprache, Helligkeit und Farbe von Bildern, die Temperatur usw. sind also, abgesehen von mikroskopischen Quantisierungseffekten beispielsweise der Ladung der Energie, des Impulses usw., zunächst stets analog. Analoge Schaltungen erzeugen oder verarbeiten derartige Signale. Ihnen ist dieses Kapitel gewidmet, wobei wir uns auf die Verstärkung von Signalen beschränken werden. Grundsätzlich werden wir stets den in Bild III.1 skizzierten Fall vorfinden, dass ein Eingangssignal E durch eine Schaltung in ein Ausgangssignal A umgewandelt wird. Kennen wir dabei sowohl das Eingangssignal als auch die Schaltung, so sprechen wir von der Analyse. Unter Synthese versteht man dagegen die Aufgabe, eine Schaltung zu entwickeln, die aus einem bestimmten Eingangssignal ein gewünschtes Ausgangssignal generiert. Schaltung E Analyse: A gesucht A Synthese: Schaltung gesucht Bild III.1: Aufgabenstellungen der Schaltungstechnik Ferner kann man unterscheiden, ob eine Analyse bzw. Synthese im Zeitbereich erfolgen soll, also die Signalform über der Zeit von Bedeutung ist, in diesem Fall spricht man auch von transienten Prozessen, oder ob bestimmte Größen wie z.B. die Verstärkung einer Schaltung über der Frequenz, also stationäre Prozesse untersucht werden sollen. Wir werden mit Rücksicht auf die Anwendbarkeit der relativ einfach handhabbaren Kleinsignalersatzschaltbilder lediglich stationäre Vorgänge mit kleinen Signalaussteuerungen betrachten. 1. Verstärkergrundschaltung Jedem Studierenden, ob er sich im Haupt- oder Nebenfach mit der Elektrotechnik beschäftigen mag, dürften wohl zunächst die langwierigen Kapitel über die Berechnung von Netzwerken bestehend aus ausschließlich Widerständen, Kapazitäten, Induktivitäten sowie Spannungs- und Stromquellen als reichlich verfehlt erscheinen, hat er doch schon längst die Bedeutung der Transistoren für die moderne Elektronik kennengelernt. Nachdem wir uns nun kurz mit den halbleitertechnischen Grundlagen dieser Bauelemente beschäftigte haben, werden wir den Bogen zur Netzwerktheorie jedoch wieder schließen, indem wir fortan nur noch die bereits eingeführten Ersatzschaltbilder der Bauelemente verwenden, die wiederum lediglich aus den genannten Schaltelementen bestehen. Dies geschieht nicht zur Rechtfertigung für vorangegangene Mühen, sondern ist die einzige Möglichkeit, trotz der komplizierten halbleitertechnischen Zusammenhänge in jedem einzelnen Bauelement Schaltungen mit einer Vielzahl von ihnen überhaupt handhaben zu können. Wie jedes Modell geben auch Ersatzschaltbilder dabei stets nur einige Aspekte der Realität wieder und müssen also der Aufgabe entsprechend sorgfältig ausgewählt werden. 1.1. Emitterstufe Die einfachste Verstärkerschaltung ist die Emitterstufe. Ihren Namen verdankt sie der Tatsache, dass der Emitter sowohl im Ein- als auch Ausgangskreis des Verstärkers liegt, der Transistor selbst also in Emitterschaltung arbeitet. Den grundsätzlichen Aufbau der Stufe zeigt Bild III.2. 49 A. Thiede Elektronik für den Maschinenbau UCC R1 ib RC ue ue R2 R1|| R2 rbe bib rce RC ua RL ua Bild III.2: Grundschaltung und Kleinsignalersatzschaltbild der Emitterstufe Für die folgenden Berechnungen wird nun also der Transistor durch ein einfaches Ersatzschaltbild substituiert. Es besteht lediglich aus den differentiellen Widerständen rbe und rce sowie der gesteuerten Stromquelle. Für das Verständnis sehr wichtig ist der folgende, oft zunächst einige Schwierigkeiten verursachende Gedankengang: Die Betriebsspannung UCC ist ebenso wie die Masse, die ja faktisch eine auf 0 V liegende Betriebsspannung ist, eine Konstantspannung. Eine konstante Spannung impliziert, dass sie sich nicht ändert. Der Wechselspannungsanteil ist also auf dem Knoten UCC ebenso wie auf der Masse gerade 0. Knoten mit dem gleichen Potential können aber verbunden werden. Dies gilt selbstverständlich nur für die Wechselspannungsbetrachtung und keinesfalls etwa für die Berechnung des Arbeitspunktes ! Verbindet man für die Wechselspannungsbetrachtung nun UCC mit der Masse, so sind die Widerstände R1 und R2 offensichtlich parallel geschaltet. Entsprechend wurden sie in dem in Bild III.2 rechts dargestellten Ersatzschaltbild bereits zusammengefasst. Der Widerstand RC wurde entsprechend der vorangestellten Überlegung vom Ausgang zur Masse geschaltet. Ferner wurde die Schaltung um einen in rot dargestellten Lastwiderstand ergänzt, um auch dessen Einfluss auf das Verhalten der Schaltung berücksichtigen zu können. Wir wollen nun zuerst die Verstärkung der Schaltung ermitteln. Hierzu bestimmen wir die Ausgangs- und Eingangsspannung und bilden anschließend deren Verhältnis: − bi b ⋅ ( rce ||R C ||R L ) u b v= a = = − ⋅ (R C ||rce ||R L ) III.1 ue i b ⋅ rbe rbe Denken wir z.B. an die Auswahl geeigneter Lautsprecherboxen für die heimische Musikanlage, so wird deutlich, dass auch Ein- und Ausgangswiderstand wichtige Parameter eines Verstärkers sind. Für deren Berechnung stellt man sich vor, dass an den Ein- bzw. Ausgang eine Spannungsquelle angeschlossen, der dann fließende Strom gemessen bzw. berechnet und schließlich der Widerstand als Quotient von Spannung und Strom ermittelt wird. Gehen wir auf diese Weise vor, so erhalten wir: re = rbe || (R 1 || R 2 ) III.2 ra = rce ||R C III.3 Wird statt eines Bipolartransistors ein FET verwendet, uDD so heißt die entsprechende, in Bild III.3 dargestellte Schaltung Sourcestufe. Die Ergebnisse aus RD R1 Gleichung III.1-3 lassen sich auf diese Schaltung in einfacher Weise übertragen. Zwar sind sowohl die Stromverstärkung als auch der Eingangswiderstand des RL FET bei niedriger Frequenz, also ohne BerückR2 sichtigung der Gatekapazität, unendlich groß. In den Formeln benötigen wir aber zumeist nur das Verhältnis dieser Größen, das endlich ist und der Steilheit des FET Bild III.3: Grundschaltung der Sourcestufe entspricht. 50 A. Thiede Elektronik für den Maschinenbau Mit b ⋅ u be = g m ⋅ u be , wobei b → ∞, rbe → ∞ III.4 rbe erhält man also aus Gleichung III.1-3 v = −g m R D || rds || R L III.4 re = R 1 || R 2 III.5 ra = rds || R D III.6 Da dieses Vorgehen auch bei allen anderen Grundschaltungen möglich ist, können wir uns hier auf die Berechnung von Bipolartransistorschaltungen beschränken. b ⋅ ib = 1.2. Emitterfolger (Kollektorstufe) Entsprechend der Systematik aus Abschnitt 1.1 wird die im folgenden zu behandelnde Stufe als Kollektorstufe bezeichnet, da der Transistor in Kollektorschaltung arbeitet. Wir werden jedoch feststellen, dass die Spannungsverstärkung dieser Schaltung nahezu 1 ist, die Ausgangsspannung am Emitter also der Eingangsspannung in nahezu idealer Weise folgt. Populärer ist daher die Bezeichnung Emitterfolger. ib UCC rbe ue RE ua bib ue RE -UEE rbe RG rce ua ib bib rce RE RL Bild III.4: Grundschaltung des Emitterfolgers Wir ersetzen wiederum zunächst den Transistor durch ein einfaches Ersatzschaltbild bestehend aus rbe , rce und der gesteuerten Stromquelle, verbinden den Knoten UCC mit der Masse und erhalten nach nochmaligem Umzeichnen das in Bild III.4 unten dargestellte Ersatzschaltbild des Emitterfolgers, ergänzt mit dem Innenwiederstand RG des am Eingang anzuschließenden Generators sowie mit dem Lastwiderstand RL. Berechnen wir wieder zunächst die Ein- und Ausgangsspannung und daraus schließlich die Verstärkung. III.7 u a = ( b + 1) ⋅ i b ⋅ ( rce ||R E ||R L ) 51 A. Thiede Elektronik für den Maschinenbau u e = i b ⋅ rbe + u a = v= ua = ue ua ⋅r + u ( b + 1) ⋅ ( rce ||R E ||R L ) be a III.8 1 1 ≈ ≈1 rbe rbe 1+ 1+ (b + 1)(rce || R E || R L ) b⋅RE III.9 In Gleichung III.9 sind die angegebenen Näherungen möglich, solange RE der kleinste und damit dominierende Widerstand der Parallelschaltung des stets sehr großen Widerstandes rce, des Widerstandes RE selbst und des Lastwiderstandes RL ist. Für große Werte der Stromverstärkung b wird v schließlich tatsächlich nahezu 1. Aus der Eingangsspannung u e = i b ⋅ rbe + ( b + 1) ⋅ i b ⋅ ( rce ||R E ||R L ) III.10 folgt sofort der Eingangswiderstand re = rbe + ( b + 1) ⋅ ( rce ||R E ||R L ) ≈ rbe + b ⋅ R E Aus u a = ( ( b + 1) ⋅ i b + i a ) ⋅ ( rce ||R E ) = -i b ⋅ ( rbe +R G ) III.11 folgt zunächst ⎛ b +1 1 ⎞ + ia = ⎜ ⎟ ⋅ ua ⎝ rbe + R G rce ||R E ⎠ und schließlich ⎛ ⎞ ⎜ ⎟ ( rce ||R E )( rbe + R G ) 1 ⎟= ra = ⎜ ⎜ b + 1 + 1 ⎟ ( rce ||R E )( b + 1) + rbe + R G ⎜ r +R rce ||R E ⎟⎠ G ⎝ be Da rce stets einen sehr großen Wert annimmt, kann erneut wie folgt genähert werden: R E ( rbe + R G ) r + R G rbe = R E || be ≈ ra ≈ R E ( b + 1) + rbe + R G b+1 b III.12 III.13 III.14 Anhand des folgenden Zahlenbeispiels sollen einige Eigenschaften dieser beiden wichtigen Grundschaltungen verglichen werden: B=b=100, U T =25 mV, IC = 2.5 mA, U R C = 2.5 V, R E = 1 kΩ → rbe = B ⋅ U T 100 ⋅ 25mV 2.5V = = 1kΩ , R C = = 1kΩ IC 2.5mA 2.5mA Emitterstufe v v=− b ⋅ R C = −100 rbe re ra re ≈ rbe = 1 kΩ ra ≈ RC = 1 kΩ Bem. • • v= 1 r 1 + be b ⋅ RE Emitterfolger 1 = = 0.99 1 + 0,01 re ≈ rbe + bRE = 101 kΩ r ra = R E || be = 1 kΩ || 10 Ω = 9.9 Ω b Impedanzwandler • • Leistungsverstärker (gl. Spannung, mehr Strom) guter Spannungsverstärker kaskadierbar (re ≈ ra) 52 A. Thiede Elektronik für den Maschinenbau 1.3. Differenzverstärker Wurde von den bisher behandelten Verstärkern eine gegen die Masse gemessene Spannung verstärkt, so verstärken die Differenzverstärker, daher der Name, lediglich die Differenz zwischen zwei verschiedenen Spannungen. Die Grundschaltung ist in Bild III.5 dargestellt. UCC RC RC ua1 ua2 ue1 ue2 I0 RE UEE Bild III.4: Grundschaltung des Differenzverstärkers Wir betrachten zunächst die tatsächliche Differenzansteuerung und setzen hierzu die Spannung ue2=0. Dann gilt wegen der Symmetrie der Anordnung ube1=-ube2 und folglich u e1 = u be1 − u be2 = 2 u be1 III.15 Da also über jedem Transistor gerade die halbe Eingangsspannung liegt, ergibt sich als Differenzverstärkung auch gerade die halbe Verstärkung der Emitterstufe, also u u 1 1 b v D = a1 = a2 = v ES = − ⋅ ⋅ R C III.16 u e1 u e2 2 2 rbe Für den Ein- und Ausgangswiderstand erhält man näherungsweise entsprechend Gleichung III.2-3 re = 2 rbe III.17 ra = R C III.18 Idealerweise dürfte sich die Ausgangsspannung eines Differenzverstärkers nicht verändern, wenn sich beide Eingänge um den gleichen Betrag ändern. Selbstverständlich ist dies bei realen Schaltungen nie wirklich genau der Fall. Berechnen wir daher die Gleichtaktverstärkung, also die Änderung der Ausgangsspannung bezogen auf eine gleichartige Änderung beider Eingangsspannungen. Werden jedoch beide Eingänge mit der gleichen Spannung beaufschlagt, so kann man gedanklich die völlig symmetrischen Hälften der Schaltung getrennt analysieren. Bild III.5 zeigt die so gedanklich erzeugte Schaltung und das entsprechende Ersatzschaltbild. Dabei ist zu beachten, dass der Widerstand RE für diese Betrachtung verdoppelt werden muss, weil ja beim Zusammenfügen der getrennten Schaltungshälften 2 R E || 2 R E = R E ergibt. Wir erhalten nun für die Ein- und Ausgangsspannung u a = −b ⋅ i b ⋅ R C III.19 u u u e = i b ⋅ rbe + ( b + 1) ⋅ i b ⋅ 2 R E = − a ⋅ rbe − a ⋅ ( b + 1) ⋅ 2 R E III.20 b ⋅ RC b ⋅ RC und somit für die Gleichtaktverstärkung 53 A. Thiede Elektronik für den Maschinenbau UCC ib RC rbe bib ue ue RC ua 2RE ua 2RE UEE Bild III.5: Schaltbilder zur Berechnung der Gleichtaktverstärkung ua R 1 1 =− ≈− ≈− C III.21 1 2 RE b + 1) 2 R E ue 2R ( rbe E + + ⋅ v ES RC b ⋅ RC b RC Interessant ist die das Verhältnis der erwünschten Differenzverstärkung und der unerwünschten Gleichtaktverstärkung. Es wird Gleichtaktunterdrückung G genannt und beträgt b ⋅RC 2rbe v b⋅RE III.22 G= D = = RC vG rbe 2R E Es wird deutlich, dass offensichtlich große RE die Gleichtaktunterdrückung erhöhen. Damit werden jedoch der Strom I0 reduziert oder, um den gleichen Strom zu erreichen, betragsmäßig große Betriebsspannungen notwendig. Praktisch nutzt man deshalb anstelle eines Widerstandes Stromquellen, die eine gewünschten Strom garantieren und gleichzeitig einen großen Innenwiderstand haben. vG = 1.4. Dynamisches Verhalten Haben wir bisher die Verstärkergrundschaltungen ausschließlich bei so tiefen Frequenzen betrachtet, dass sämtliche Kapazitäten oder Induktivitäten der Ersatzschaltbilder unberücksichtigt bleiben konnten, so wollen wir nun das Frequenzverhalten analysieren. Hierzu sind zunächst einige generelle Überlegungen notwendig, die relativ abstrakt und daher sehr generell und einfach die Beschreibung des Verhaltens derartiger Schaltungen erlauben, bevor wir die so gewonnenen Erkenntnisse an einer Beispielschaltung überprüfen werden. a) Ideales Übertragungsglied: Das einfachste Beispiel eines idealen Übertragungsgliedes ist eine ideale Leitung. Sie lässt alle Signale unabhängig von ihrer Frequenz passieren, verzögert das Signal jedoch entsprechend ihrer Länge. Nehmen wir an, dass die Verzögerungszeit 1 µs beträgt. Dann ist die Verzögerung als Phasenwinkel ausgedrückt bei einer Frequenz von 0.5 MHz gerade eine halbe Periode oder π, bei einer Frequenz von 1 MHz bereits 2 π usw., die Phasenverzögerung steigt also linear mit der Frequenz. Geben wir uns eine cosinusförmige Eingangsspannung vor und ergänzen sie entsprechend Kapitel I zu einer komplexen Größe 54 A. Thiede Elektronik für den Maschinenbau u e ( t ) = U 0 ⋅ cos ( ωt ) → u e = U 0e ( ) so können wir eine komplexe Übertragungsfunktion u -j ωT H ( jω ) =v ⋅ e ( ) mit H ( jω ) = a ue definieren. Der Betrag dieser Übertragungsfunktion H ( jω ) = A ( ω ) = v j ωt III.23 III.24 III.25 wird als Amplitudengang bezeichnet und ist beim idealen Übertragungsglied konstant. Die Phase der Übertragungsfunktion wird Phasengang genannt. Wie eingangs erläutert sinkt die Phase bei einem idealen Übertragungsglied linear mit der Frequenz. arg ( H ( jω ) ) = ϕ ( ω ) = −ωT III.26 In Bild III.6 sind Amplituden- und Phasengang als Funktion der Frequenz dargestellt. A(ω) φ(ω) ω ω Bild III.6: Amplituden- und Phasengang des idealen Übertragungsglieds Über die Fourier-Transformation sind der Amplituden- und Phasengang eines Systems, d.h. die Darstellung im Frequenzbereich, direkt mit der Sprungantwort, d.h. dem Zeitbereich, verkoppelt. Unter der Sprungsantwort versteht man den Verlauf eines Signals dargestellt über der Zeit, der sich ergibt, wenn an den Eingang eine sich sprungförmig verändernde Spannung angelegt wird. Bild III.7 zeigt einen solchen Eingangsspannungsimpuls und die Sprungantwort des idealen Übertragungsglieds. Natürlich ergibt sich abgesehen von einer möglichen Verstärkung um die Zeit T verzögert die exakt gleiche Signalform. U(t) v U0 U0 T t Bild III.7: Sprungantwort des idealen Übertragungsglieds b) Tiefpass 1.Ordnung: Nachdem wir einige zentrale Begriffe am Beispiel des idealen Übertragungsglieds eingeführt haben, wollen wir uns nun dem Tiefpass 1.Ordnung zuwenden. Ein Tiefpass lässt tiefe Frequenzen ungehindert passieren und dämpft hohe Frequenzen. Die einfachste Schaltung, die ein solches Verhalten zeigt, ist in Bild III.8 dargestellt. R ue C ua Bild III.8: Tiefpass 1.Ordnung 55 A. Thiede Elektronik für den Maschinenbau Mit Hilfe der Spannungsteilerregel bestimmen wir die Ausgangsspannung und erhalten: 1 1 jωC ⋅ ue = ⋅ ue ua = 1 1+jωRC R+ jωC Damit sind 1 H ( jω ) = 1 + jωRC 1 A ( ω ) = H ( jω ) = 2 1 + ( ωRC ) III.27 III.28 III.29 ϕ ( ω ) = −arctan ( ωRC ) III.30 Diskutieren wir das mit Gleichung III.29 und 30 gegebene Ergebnis für einige ausgewählte Frequenzen: 1 1 ⎧ ⎧ für ω << 0 für ω << ⎪ 1 ⎪ RC RC ⎪ ⎪ 1 1 ⎪ 1 ⎪ π ϕ ( ω ) ≈ ⎨− III.31 A (ω) ≈ ⎨ für ω = für ω = RC RC ⎪ 2 ⎪ 4 1 ⎪ 1 ⎪ π 1 für ω >> ⎪ − 2 für ω >> RC ⎪ ⎩ RC ⎩ ωRC Dabei ist für den Amplitudengang eine Darstellung in dB üblich. Die Spannungsverstärkung ergibt sich in dB definitionsgemäß als das zwanzigfache des dekadischen Logarithmus der Verstärkung. 1 ⎧ 0 für ω << ⎪ RC ⎪ 1 ⎪ v dB = 20 ⋅ lg A ( ω ) ≈ ⎨ − 3dB für ω = III.32 RC ⎪ 1 ⎪ ⎪-20 ⋅ lg ( ωRC ) für ω >> RC ⎩ Damit ergeben sich für den in dB aufgetragenen Amplitudengang und den Phasengang besonders einfache Verläufe, wenn man die Frequenzachse logarithmisch teilt. Diese Darstellung in Bild III.9 wird als Bode-Diagramm bezeichnet. A(ω) in dB 0 -20 φ(ω) max. Fehler 3 dB ½π -20 dB Dekade ¼π -40 0 -60 -¼ π -½ π f / f0 0.01 0.1 1 10 100 Bild III.9: Amplituden- und Phasengang des Tiefpass 1.Ordnung 56 0.01 0.1 1 10 100 f / f0 A. Thiede Elektronik für den Maschinenbau Die Amplitude bleibt bei niedrigen Frequenzen zunächst konstant, d.h. Signale mit tiefer Frequenz können passieren, und sinkt bei hohen Frequenzen um 20 dB pro Frequenzdekade, d.h. bei Verzehnfachung der Frequenz sinkt die Amplitude des Signals auf ein Zehntel. Verbindet man beide Geraden wie in Bild III.9 grün dargestellt, so ergibt sich ein besonders einfacher Verlauf, der als Näherung für viele Abschätzungen völlig ausreichend ist. Der größte Fehler im Vergleich zu dem schwarz dargestellten realen Verlauf ergibt sich exakt bei der Grenzfrequenz. Er beträgt 3 dB, denn bei der Grenzfrequenz ist die Verstärkung ja bereits um etwa 3 dB, d.h. auf das etwa 0.7-fache des Ausgangswertes gesunken. Der Frequenzgang läßt sich ebenfalls sehr einfach skizzieren, denn jeder Tiefpass dreht die Phase um -90° oder -½ π. Bei der Grenzfrequenz beträgt diese Phasendrehung genau -¼ π. Vielleicht etwas anschaulicher ausgedrückt bedeutet dies, tiefe Frequenzen werden nicht, hohe Frequenzen um ¼ ihrer Periodenlänge verzögert. Die Grenzfrequenz, aufgrund des Kennlinienverlaufs auch Eckfrequenz genannt ist gemäß Gleichungen III.31 bzw. 32 ω 1 f0 = 0 = III.33 2π 2π ⋅ RC Die Impulsantwort kann durch Lösung der Differentialgleichung oder mit Hilfe der LaplaceTransformation entsprechend Abschnitt I.2 bestimmt werden. Es ergibt sich wie in Bild III.10 dargestellt allgemein ein exponentiell verlaufender Ausgleichsvorgang. Anschaulich auf Bild III.8 bezogen ergibt ein Sprung der Eingangsspannung also, dass sich die Kapazität langsam über den Widerstand auflädt, so wie auch eine Badewanne nicht sofort gefüllt ist, wenn man den Wasserhahn sprunghaft öffnet. U(t) U0 v U0 t Bild III.10: Sprungantwort des Tiefpass 1.Ordnung c) Hochpass 1.Ordnung: Ein Hochpass lässt umgekehrt hohe Frequenzen ungehindert passieren und dämpft tiefe Frequenzen. Die einfachste Schaltung, die ein solches Verhalten zeigt, ist in Bild III.11 dargestellt. Widerstand und Kapazität sind gegenüber Bild III.8 lediglich vertauscht. C ue R ua Bild III.11: Hochpass 1.Ordnung Mit Hilfe der Spannungsteilerregel bestimmen wir wieder die Ausgangsspannung und erhalten: R jωRC ua = ⋅ ue = ⋅ ue III.34 1 1+jωRC R+ jωC Damit sind 57 A. Thiede H ( jω ) = Elektronik für den Maschinenbau jωRC 1 + jωRC A ( ω ) = H ( jω ) = III.35 ωRC 1 + ( ωRC ) III.36 2 π − arctan ( ωRC ) III.37 2 Diskutieren wir das mit Gleichung III.36 und 37 gegebene Ergebnis wieder für die ausgewählten Frequenzen: 1 1 ⎧ ⎧ π für ω << für ω << ⎪ ωRC ⎪ RC 2 RC ⎪ ⎪ 1 1 ⎪ 1 ⎪ π III.38 ϕ ( ω) ≈ ⎨ A ( ω) ≈ ⎨ für ω = für ω = RC RC ⎪ 2 ⎪ 4 1 ⎪ ⎪ 1 für ω >> für ω >> ⎪ 1 ⎪ 0 RC ⎩ RC ⎩ Die Spannungsverstärkung in dB ergibt: 1 ⎧ ⎪20 ⋅ lg ( ωRC ) für ω << RC ⎪ 1 ⎪ v dB = 20 ⋅ lg A ( ω ) ≈ ⎨ − 3dB für ω = III.39 RC ⎪ 1 ⎪ 0 für ω >> ⎪ RC ⎩ ϕ ( ω) = Damit ergibt sich wieder für den in dB aufgetragenen Amplitudengang und den Phasengang jeweils über einer logarithmisch geteilten Frequenzachse das in Bild III.12 dargestellte sehr einfache Bode-Diagramm. A(ω) in dB φ(ω) max. Fehler 3 dB ωRC ½π 0 1 -20 1+ ( ωRC ) ¼π 2 1 10 100 0 -40 -60 0.01 0.1 20 dB -¼ π f / f0 Dekade -½ π f / f0 0.01 0.1 1 10 100 Bild III.12: Amplituden- und Phasengang des Hochpass 1.Ordnung Die Amplitude steigt bei tiefen Frequenzen um 20 dB pro Frequenzdekade, d.h. bei Verzehnfachung der Frequenz steigt die Amplitude des Signals auf das Zehnfache, und bleibt bei hohen Frequenzen konstant. Signale mit tiefer Frequenz werden also gedämpft. Verbindet man beide Geraden wie in Bild III.12 grün dargestellt, so ergibt sich erneut ein besonders einfacher Verlauf. Der größte Fehler im Vergleich zu dem schwarz dargestellten realen Verlauf ergibt sich wieder exakt bei der Grenzfrequenz und beträgt 3 dB, 58 A. Thiede Elektronik für den Maschinenbau denn bei der Grenzfrequenz ist die Verstärkung ja bereits um etwa 3 dB, d.h. auf das etwa 0.7-fache des Ausgangswertes gesunken. Wie in roter Farbe zusätzlich eingezeichnet, kann man den Amplitudengang auch konstruktiv ermittelt, indem man den Nenner von Gleichung III.36, der ja dem Nenner der Gleichung III.29 für den Tiefpass entspricht, mit dem in Gleichung III.36 zusätzlich auftauchenden Zählerterm überlagert. Dabei bewirkt die Logarithmierung, dass die zu multiplizierenden Terme in der Darstellung addiert werden müssen. Die Summe beider roter Kennlinien ergibt also gerade den grün dargestellten Amplitudengang. Der Frequenzgang läßt sich ebenfalls sehr einfach skizzieren, denn auch jeder Hochpass dreht die Phase um -90° oder -½ π. Die Phasendrehung beginnt für tiefe Frequenzen im Unterschied zum Tiefpass jedoch bei ½ π, ist bei der Grenzfrequenz genau ¼ π und für hohe Frequenzen schließlich 0. Anschaulich ausgedrückt bedeutet dies also, dass bei tiefen Frequenzen die Ausgangsspannung der Eingangsspannung um ¼ ihrer Periodenlänge vorauseilt. Es sei hier angemerkt, das dies keineswegs dem Kausalitätsprinzip widerspricht, da die von uns betrachtete stationäre Schwingung ja allein noch keine Information enthält. Hierfür ist vielmehr die zur Ausbildung von Signalen notwendige Überlagerung vieler Frequenzen zu betrachten, deren Ausbreitung durch die sogenannte Gruppenlaufzeit beschrieben wird. Die Grenzfrequenz oder Eckfrequenz ist auch beim Hochpass gemäß Gleichungen III.38 bzw. 39 ω 1 f0 = 0 = III.40 2π 2π ⋅ RC Als Impulsantwort ergibt sich beim Hochpass allgemein der in Bild III.13 dargestellte exponentielle Verlauf. Bezogen auf Bild III.11 ergibt ein Sprung der Eingangsspannung, dass auch die Ausgangsspannung springt, da sich die Ladung auf der Kapazität und damit deren Spannung ja nicht verzögerungslos ändern können. Mit der Zeit fließt die Ladung jedoch über den Widerstand ab. Noch bildhafter könnte man sich vorstellen, ein am Boden mit einem kleinen Loch versehener Eimer wird ins Wasser gehalten, bis das Wasser im Eimer aufgrund des Loches das Niveau des umgebenden Gewässers erreicht hat. Reißt man den Eimer plötzlich um 10 cm hoch, so ist der Wasserpegel im Eimer zunächst 10 cm oberhalb des Gewässer, bevor er sich in einer gewissen Zeit exponentiell wieder diesem Niveau angleicht. U(t) v U0 U0 t Bild III.13: Sprungantwort des Hochpass 1.Ordnung d) Übertragungsglieder höherer Ordnung: Durch rückwirkungsfreie Serienschaltung der Grundelemente können Übertragungsglieder höherer Ordnung realisiert werden. Bild III.14 zeigt links als Beispiel einen Tiefpass zweiter Ordnung. Bei der ersten Grenzfrequenz erfährt der Amplitudengang einen ersten Knick und sinkt mit 20 dB pro Dekade. Die Phase dreht um -½ π von 0 auf -½ π. Ab der zweiten Grenzfrequenz sinkt die Amplitude dann um 40 dB pro Dekade und die Phase dreht bei dieser Frequenz um weitere -½ π von -½ π auf –π. Beide Frequenzen können natürlich auch zusammenfallen. Dann würde die Amplitude sofort mit 40 dB pro Dekade fallen und die Phase um 2 mal -½ π von 0 auf –π fallen, die Phasendrehung bei exakt der Eckfrequenz wäre also 2 mal -¼ π, also bereits -½ π. Bild III.14 rechts zeigt als weiteres Beispiel das Bode-Diagramm eines Bandpasses. Er lässt Frequenzen eines bestimmten Bereiches, auch als Band bezeichnet, passieren, und dämpft alle Frequenzen, die 59 A. Thiede Elektronik für den Maschinenbau oberhalb einer oberen oder unterhalb einer unteren Grenzfrequenz liegen. Er entsteht aus der Kombination eines Hoch- und eines Tiefpasses. A(ω) in dB A(ω) in dB 20 dB -20 dB Dekade Dekade -20 dB 0 0 Dekade -20 -20 -40 dB -40 -40 Dekade -60 -60 0.1 f1 f1 10 f1 f2 10 f2 f φ(ω) 0 0.1 f1 f1 10 f1 f2 10 f2 0.1 f1 f1 10 f1 f2 10 f2 f φ(ω) 0.1 f1 f1 10 f1 f2 10 f2 ½π f ¼π 0 -½ π f -¼ π -½ π -π Bild III.14: Bodediagramm eines Tiefpasses 2.Ordnung (links) und eines Bandpasses (rechts) e) Beispiel: Emitterstufe mit Lastkapazität Wie eingangs angekündigt, wollen wir diese bisher eher abstrakten Betrachtungen nun beispielhaft an einer einfachen Schaltung nachvollziehen. Hierfür nutzen wir die in Bild III.15 dargestellte, gegenüber Bild III.2 mit einer Kapazität belastete Emitterstufe. Daraus kann zunächst das rechts gezeigte Ersatzschaltbild abgeleitet werden. UCC RC CL ue ib rbe ua bib rce RC Bild III.15: Schaltbild und Kleinsignalersatzschaltbild der kapazitiv belasteten Emitterstufe 60 CL A. Thiede Elektronik für den Maschinenbau Wir berechnen nun wieder die Ausgangsspannung und erhalten R ||r ce C u a = −b ⋅ i b ⋅ 1 1 1 + + jωCL rce R C = −u e ⋅ b 1 1 ⋅ ⋅ rbe 1 + 1 1 + jωCL ⋅ rce ||R C rce R C III.41 v0 Tiefpass 1.Ordnung 1 f0 = CL ⋅R C ||rce Der durch die Kapazität verursachte, rot dargestellte zusätzliche Term entspricht genau Gleichung III.28 und beschreibt also einen Tiefpass. 2. Rückkopplung In der praktischen Schaltungstechnik wird aus einer Reihe später noch zu besprechender Gründe nahezu keine Schaltung ohne Rückkopplung eingesetzt, d.h. es wird stets ein Teil des Ausgangssignals wieder auf den Eingang zurückgeführt. Auch diesem Thema wollen wir uns mit Hilfe der in Bild III.16 dargestellten Schaltung zunächst sehr einfach und abstrakt zuwenden. Wir erkennen im Vorwärtspfad einen Verstärker mit der Verstärkung v. Das Ausgangssignal wird im Rückkopplungspfad um den Faktor k verstärkt und anschließend vom Eingangssignal subtrahiert. Wir erhalten für das Ausgangssignal: xm xa = v ⋅ xm = v ⋅ ( xe − k ⋅ xa ) III.42 xa xe v + und somit für die Verstärkung der Gesamtschaltung x v III.43 v′ = a = k xe 1 + k ⋅ v k ⋅ v heißt Schleifenverstärkung. Bild III.16: Rückgekoppelter Verstärker Mit Hilfe der Schleifenverstärkung können wir nun drei Fälle unterscheiden: v Gegenkopplung: k ⋅ v > 0 , 1 + k ⋅ v > 1 , v′ = < v 1+ k ⋅ v v -1 < k ⋅ v < 0 , 1 + k ⋅ v < 1 , v′ = > v Mitkopplung: 1+ k ⋅ v k ⋅ v = −1 , 1 + k ⋅ v = 0 , v′ → ∞ Selbsterregung: III.44 III.45 III.46 Wenn im letzten Fall die Gesamtverstärkung unendlich groß wird, so bedeutet dies, das auch für eine gegen 0 gehende Eingangsspannung ein Ausgangssignal entsteht. Schaltungen, die ohne Eingangssignal ein Ausgangssignal erzeugen, heißen Generatoren. Wir werden hierauf im Zusammenhang mit der Stabilität von Schaltungen in Abschnitt III.3 wieder zu sprechen kommen. Ein weiterer sehr interessanter Fall tritt ein, wenn die Verstärkung v sehr groß wird. v 1 v′ = = für k ⋅ v >> 1 III.47 1+k ⋅ v k Gleichung III.47 besagt, das Verhalten einer rückgekoppelten Schaltung wird nicht mehr von der Verstärkung v, sondern nur noch von der Rückkopplung bestimmt, wenn die Verstärkung v nur groß genug ist. Dies wird in Operationsverstärkerschaltungen ausgenutzt, auf die wir im Anschnitt III.4 eingehen werden. 61 A. Thiede Elektronik für den Maschinenbau 2.1. Spannungsgegenkopplung Nach diesen zunächst recht allgemeinen Betrachtungen, wenden wir uns nun wieder der Emitterstufe zu. Wie in Bild III.17 gezeigt wird durch den zusätzlichen Rückkopplungswiderstand RF ein Teil der Ausgangsspannung auf den Eingang zurückgekoppelt. Die rückgekoppelte Teilspannung kann mit Hilfe der Spannungsteilerregel berechnet werden, wobei RG der Teilwiderstand und RG+RFºRF der Gesamtwiderstand ist, da der Rückkopplungswiderstand zumeist sehr groß ist. Die Gesamtverstärkung ist also: v III.48 v′ = UCC RG 1− ⋅v RF wobei v entsprechend Gleichung III.1 b (R C || rCE || R F ) v=− III.49 RF rbe ist. Die Wirkung der SpannungsgegenkoppRG lung ist eine Stabilisierung der Ausgangsspannung, da deren Erhöhung ja als Erhöhung der Eingangsspannung wirkt, diese aber wiederum aufgrund der invertierenden Wirkung des u a ue Verstärkers die Ausgangsspannung reduziert, also ihrer Erhöhung entgegenwirkt. Damit sinkt ∆u a bzw. der Ausgangswiderstand ∆u a III.50 Bild III.17: Emitterstufe mit Spannungsgegenkopplung ra = ∆i a Eine derartiges Verhalten wird bei Spannungsquellen gewünscht, woraus sich eine Anwendung dieser Art der Rückkopplung ergibt. 2.2. Stromgegenkopplung Eine Emitterstufe mit Stromgegenkopplung zeigt Bild III.18. Diese Konfiguration hatten wir bereits in Bild III.5 vorgefunden, als wir in Abschnitt III.1 die Gleichtaktverstärkung des Differenzverstärkers zu untersuchen war. Wir können also für die Verstärkung das Ergebnis aus Gleichung III.21 übernehmen. v UCC III.51 v′ = RE 1− ⋅v RC RC wobei die Verstärkung v wieder b (R C || rCE ) v=− III.52 rbe ist. Zur Veranschaulichung der Wirkungsweise RG der Stromgegenkopplung stelle man sich vor, dass aufgrund der Erwärmung beim Betrieb des Verstärkers der Basisstrom des Transistors ua steigt. Damit würden der Kollektorstrom und ue RE der durch den Widerstand RE fließende Emitterstrom steigen, der Spannungsabfall über RE erhöht sich, die Basis-EmitterSpannung wird reduziert und schließlich sinkt Bild III.18: Emitterstufe mit Stromgegenkopplung der Basisstrom bzw. seiner Erhöhung wird ent 62 A. Thiede Elektronik für den Maschinenbau gegengewirkt. Diese Art der Gegenkopplung ist aufgrund der Temperaturabhängigkeit der Bipolartransistoren in Bipolarverstärkern stets notwendig. Um jedoch die entsprechend Gleichung III.51 damit verbundene Reduzierung der Verstärkung nicht in Kauf nehmen zu müssen, wird der Widerstand RE kapazitiv überbrückt. Für langsame Änderungen, z.B. durch Temperaturschwankungen, wirkt die Kapazität nicht, d.h. diesen Änderungen wird entgegengewirkt. Die Kapazität muss jedoch so groß gewählt werden, dass sie bei den Frequenzen der zu verstärkenden Signale nahezu einen Kurzschluss darstellt, so dass der Gegenkopplungswiderstand RE hier wirkungslos ist. Bezüglich der stromstabilisierenden Wirkung der Stromgegenkopplung sei noch vermerkt, dass hier also ∆i a sinkt und somit entsprechend Gleichung III.50 der Ausgangswiderstand steigt. Ein derartiges Verhalten ist bei Stromquellen erwünscht. 2.3. Wirkungen von Rückkopplung Nach den allgemeinen Betrachtungen zur Rückkopplung und zwei grundlegenden Schaltungsbeispielen soll dieses überaus komplexe Thema mit einer Zusammenstellung der durch Rückkopplung erzielbaren, erwünschten und unerwünschten Effekte abgeschlossen werden: + Stabilisierung (bezüglich Parametern, Spannungsversorgung, Temperatur, ...) + Reduktion nichtlinearer Verzerrungen + Beeinflussung der Ein- und Ausgangswiderstände + Reduktion von Störsignalen + Erhöhung der Bandbreite (Das Produkt aus Verstärkung und Bandbreite ist stets konstant.) Reduktion der Verstärkung Instabilität, Schwingneigung 3. Stabilität Bereits in den einführenden Betrachtungen zum Abschnitt III.2 und nochmals im Abschnitt III.2.3 wurde auf die Gefahr hingewiesen, dass rückgekoppelte Verstärker instabil werden, d.h. unerwünscht Oszillationen erzeugen können. Verstärker ohne Rückkopplung sind zwar stets stabil, doch sind für die Stabilität natürlich auch ungewollte Rückkopplungen maßgebend, die praktisch immer auftreten. Populärstes Beipiel hierfür sind vielleicht die Pfeifgeräusche einer Mikrofonanlage, die auftreten, wenn die Dämpfung des akustischen Signals, also k-1 , kleiner ist als die Verstärkung der Anlage, also v, so dass auch hier der Betrag der Schleifenverstärkung k ⋅ v = 1 wird. Betrachten wir nochmals die uns bereits aus Bild III.16 vertraute Anordnung. Wir wollen jetzt die Frequenzabhängigkeit sowohl der Verstärkung des Vorwärtspfades als auch der Rückkopplung betrachten. ue + v(ω) ua k(ω) Bild III.19: Rückgekoppelter Verstärker Entsprechend Gleichung III.43 erhalten wir für die komplexe Gesamtverstärkung v(ω ) v ′(ω) = 1 + k (ω ) ⋅ v(ω ) Diese hat offenbar eine Polstelle bei k (ω ) ⋅ v(ω ) = −1 63 III.53 III.54 A. Thiede Elektronik für den Maschinenbau Bevor wir diese eher theoretischen Betrachtungen anhand der Übertragungsfunktion fortsetzen, sollen zunächst einige Möglichkeiten vorgestellt werden, die Stabilität einer Schaltung auch praktisch zu analysieren. 3.1. Stabilitätsuntersuchung a) Nyquist-Kriterium Bei der Untersuchung mit Hilfe des Nyquist-Kriteriums geht man von der Analyse der Schleifenverstärkung aus. Wie in Bild III.20 gezeigt, werden der Realteil und der Imaginärteil der Schleifenverstärkung aufgetragen. Wir gehen davon aus, dass v(ω) und k(ω) Tiefpasscharakter zeigen. Dann ist die Phase bei niedrigen Frequenzen 0 und sinkt mit steigender Frequenz. Ist die Summe aus der Ordnung von v(ω) und der Ordnung von k(ω) mindestens drei, so kann die Phase um mehr als –180° drehen. Bei einer Phasendrehung von -180° wird aber das rückgekoppelte Signal nicht vom Eingangssignal subtrahiert sondern addiert. Somit wird aus der Gegenkopplung eine Mitkopplung und der Betrag der Schleifenverstärkung muss kleiner 1 bleiben. Genau diese Bedingung kann aus der grafischen Darstellung in Bild III.20 abgelesen werden. Die rote und die schwarze Kurve schneiden die reelle Achse rechts von –1, die Schaltung ist stabil. Die blaue Kurve markiert die Stabilitätsgrenze, d.h. eine Schwingung könnte entstehen, wenn jeder Energieverlust ausgeschlossen wäre, was praktisch natürlich nie der Fall ist. Für die grüne Kurve kann sich eine Schwingung aufbauen, bis deren Amplitude durch die Grenzen des hier betrachteten linearen Bereiches limitiert wird. Im[kּv] x(t) Re[kּv] -1 t Bild III.20: Ortskurven der Schleifenverstärkung Bild III.21: Impulsantwort b) Sprungantwort Bild III.21 zeigt in der Bild III.20 entsprechenden farblichen Kodierung die Sprungantwort des rückgekoppelten Verstärkers. Im rot dargestellten Fall nähert sich die Spannung exponentiell ihrem Endwert. Für den schwarz dargestellten Fall entsteht ein Überschwingen, die Schwingung klingt jedoch ab. Im blau dargestellten Grenzfall klingt diese Schwingung theoretisch nicht ab, praktisch wird jedoch die stets vorhandene Dämpfung ein Abklingen bewirken. Im grünen Fall entsteht eine Schwingung deren Amplitude zunächst bis zu einem stationären Endwert steigt und dann stabil bleibt. c) Bode-Diagramm Auch aus dem bereits bekannten Bode-Diagramm können Stabilitätsaussagen abgeleitet werden. In dem im Bild III.22 rot dargestellten Fall entspricht der Amplitudengang dem bereits erläuterten Verlauf. Die Phase ändert sich allmählich. Im schwarz gezeichneten Fall kommt es zu einer leichten Überhöhung des 64 A. Thiede Elektronik für den Maschinenbau Amplitudengangs im Bereich der Grenzfrequenz, die Phase ändert sich deutlich schneller. In dem blau markierten Fall steigt die Amplitude über den bei niedrigen Frequenzen gegebenen Ausgangswert und die Phase ändert sich sprunghaft. In grün kodierten Fall schließlich wird die Amplitude bei der Resonanzfrequenz unendlich groß und es kommt zu einer Polstelle im Phasengang. φ(ω) A(ω) in dB π/2 π/4 -π / 4 -π / 2 -3π / 4 -π f / f0 1 1 f / f0 Bild III.22: Stabilitätsuntersuchung mit Hilfe von Amplituden- und Phasengang d) Übertragungsfunktion Wenden wir uns nun wieder einer allgemeineren, theoretischen Betrachtung zu. Dazu gehen wir von einem Tiefpass 2.Ordnung aus. Seine Übertragungsfunktion ist 1 1 H ( jω ) = ⋅ III.55 1 + jωτ1 1 + jωτ 2 mit τ 1 = R 1 C1 , τ 2 = R 2 C 2 III.56 Durch Multiplikation der Nenner erhalten wir 1 2 ω0 1 τ1 ⋅ τ 2 III.57 = = H ( jω ) = 1 τ1 + τ 2 ω0 2 − ω2 + jω2δ 1-ω2 ( τ1 ⋅ τ 2 ) + jω ( τ1 + τ 2 ) 2 − ω + jω τ1 ⋅ τ 2 τ1 ⋅ τ 2 mit der Eigenfrequenz 1 2 ω0 = III.58 τ1 ⋅ τ 2 und 1 τ +τ δ= ⋅ 1 2 III.59 2 τ1 ⋅ τ 2 Die Dämpfung ist dann entsprechend Gleichung I.87 δ 1 τ1 + τ 2 D= = ⋅ III.60 ω0 2 τ1 ⋅ τ 2 Damit können wir die Übertragungsfunktion schreiben als 2 ω0 III.61 H ( jω ) = 2 ω0 − ω2 + j2ωω0 D und der Amplitudengang wird 2 ω0 A ( ω ) = H ( jω ) = III.62 2 2 2 2 ω0 − ω + ( 2ωω0 D ) ( ) 65 A. Thiede Elektronik für den Maschinenbau Aus Gleichung III.62 erkennen wir, dass die Amplitude bei ω=ω0 unendlich wird, wenn die Dämpfung D=0 ist. Es sei jedoch darauf hingewiesen, dass der Fall D=0 nur eintreten kann, wenn das den Tiefpass 2.Ordnung beschreibende Nennerpolynom konjugiert komplexe Nullstellen hat, sich also nicht wie in Gleichung III.55 in zwei Tiefpässe 1.Ordnung zerlegen lässt. In letzterem Fall ist stets 1 τ +τ D= ⋅ 1 2 ≠0 III.63 2 τ1 ⋅ τ 2 Betrachten wir hierzu abschließend ein Beispiel. Die zu analysierende Schaltung zeigt Bild III.23 L ue R C ua Bild III.23: Tiefpass 2.Ordnung Die Ausgangsspannung berechnen wir wieder mit dem komplexen Spannungsteiler: 1 R⋅ jωC 1 R R+ R jωC 1 + jωRC ua = ue ⋅ = ue ⋅ = ue ⋅ III.64 2 1 R R-ω RLC jωL + R⋅ jωL + jωC 1 + jωRC jωL + 1 R+ jωC Damit erhalten wir die Übertragungsfunktion und überführen diese in die Form von Gleichung III.61, die in der Regelungstechnik auch die Normalform genannt wird. 1 ua R LC = = III.65 H ( jω ) = 2 1 ω u e R-ω RLC + jωL - ω2 + j LC RC Aus dieser Normalform können nun Resonanzfrequenz und Dämpfung abgelesen werden: 1 1 1 L 2 III.66 ω0 = , δ= , D= LC 2RC 2R C Der LC-Kreis könnte also ungedämpfte Schwingungen ausführen, wenn die Dämpfung 0, d.h. der Widerstand unendlich bzw. der Leitwert 0 wäre. Dieses Ergebnis hatten wir bereits in Abschnitt I.1.5 erhalten, als wir mit Hilfe der Differentialgleichungen ein schwingfähiges LC-Netzwerk untersucht und mit einem Feder-Masse-System verglichen hatten. Der elektrische Widerstand bzw. Leitwert spielte dabei die gleiche Rolle wie die Reibung in einem mechanischen System. Zum natürlich gleichen Ergebnis führt die hier unter dem Systemgesichtspunkt durchgeführte Betrachtung. 3.2. Amplituden- und Phasenrand Für die praktische Schaltungstechnik reicht es zumeist nicht aus zu wissen, dass die Schaltung bei einer bestimmten Frequenz nicht schwingen kann. Meist interessiert darüber hinaus, wie sicher man sich noch im stabilen Bereich bewegt und was man gegebenenfalls zur Erlangung bzw. Verbesserung der Stabilität tun kann. Diese Überlegungen führen auf die Begriffe des Amplituden- und Phasenrandes bzw. der Frequenzgangkorrektur. 66 A. Thiede Elektronik für den Maschinenbau φ | kּ v | in dB 0 f-π 0 f1 φR f -π f1 AR f-π f Bild III.24: Amplituden- und Phasenrand Dazu betrachten wir das in Bild III.24 dargestellte Bodediagramm. Dargestellt sind als ausgewählte Frequenzpunkte die Frequenz f1, bei der der Betrag der Schleifenverstärkung 1 geworden ist, sowie die Frequenz f-π, bei der die Phase auf –π, also -180° gedreht hat. Für eine stabile Schaltung ist es offensichtlich erforderlich, dass der Betrag der Schleifenverstärkung schneller auf 1 gesunken ist, als die Phase –π erreicht hat, d.h. es muss f1 < f-π gelten. Für f1 = f-π befinden wir uns gerade an der Stabilitätsgrenze. Der Betrag, um den die Schleifenverstärkung bei der Frequenz f-π den Wert 1 bereits unterschritten hat, wird als Amplitudenrand AR bezeichnet. Umgekehrt bezeichnet man als Phasenrand φR die bei der Frequenz f1 noch verbleibende Phasendifferenz zu –π. Beide Kenngrößen sind also eine Art Sicherheitsbereich für die Schaltungsdimensionierung. 3.3. Frequenzgangkorrektur Verläuft die Drehung der Phase der Schleifenverstärkung auf –π schneller als der Abfall des Betrages auf 1, so ist eine sogenannte Frequenzgangkorrektur notwendig, da die Schaltung sonst ja schwingen würde. | kּ v | in dB | kּ v | in dB >1 1 1 <1 f1 f2 f3 f φ f1 f2 f3 f1 f2 f3 f φ f1 f2 f3 f -½ π -½ π -π -π f Bild III.25: Bode-Diagramm einer instabilen (links) und frequenzgangkorregierten Schaltung (rechts) 67 A. Thiede Elektronik für den Maschinenbau Das Prinzip der Frequenzgangkorrektur besteht darin, eine Eckfrequenz herabzusetzen und somit einen schnelleren Abfall des Betrages der Schleifenverstärkung zu bewirken. Bild III.25 illustriert anhand des Bode-Diagramms dieses Prinzip. Bei f1 dreht die Phase zwar in jedem Falle auf -½ π, aber wenn f1 deutlich kleiner als f2 ist, so fällt der Betrag über einen weiten Frequenzbereich bei einer in diesem Bereich konstanten Phase von -½ π und hat bei f2 , d.h. wenn die Phasendrehung auf –π erfolgt, einen Wert, der ausreichend weit unter 1 liegt. Die Herabsetzung der Eckfrequenz geschieht in der Regel durch zusätzliche Kapazitäten. Hierfür sind z.B. bei den im nächsten Abschnitt zu behandelnden Operationsverstärkern spezielle Anschlüsse für externe Kapazitäten vorgesehen. 4. Operationsverstärker (OPV) Zur Erläuterung der Grundidee des Operationsverstärkers greifen wir eine Überlegung aus Abschnitt III.2, Gleichung III.47 wieder auf. Wir hatten dort festgestellt, dass bei rückgekoppelten Verstärkern nur das Rückkoppelnetzwerk die Gesamtschaltung bestimmt, nicht aber die Verstärkung des Verstärkers selbst, wenn diese nur hoch genug ist. Würde man also über einen Verstärker mit hoher Verstärkung verfügen, so könnte man dieses Bauelement in hohen Stückzahlen produzieren, da es universell einsetzbar wäre, da jeder Anwender mit wenigen zusätzlichen Bauelementen genau die Rückkopplung vornehmen kann, die zu dem von ihm gewünschten Verhalten führt. Ein solches Bauelement ist der Operationsverstärker. 4.1. Realisierung von Operationsverstärkern Obwohl der Vorteil des OPV gerade darin besteht, dass der Nutzer sich nicht um den inneren Aufbau dieser integrierten Schaltung kümmenrn muss, sondern ihn als ein einziges Bauelement ansehen kann, wollen wir wenigstens seinen grundsätzlichen Aufbau erwähnen. Er ist in Bild III.26 dargestellt. Die Eingangsstufe wird durch einen Differenzverstärker gebildet, dem folgt ein zumeist mehrstufiger Spannungsverstärker und schließlich als Endstufe ein Leistungsverstärker, der ausreichend große Ausgangsströme bereitstellen kann. OPV sind also integrierte Halbleiterschalterkreise (IC) und realisieren Spannungsverstärkungswerte im Bereich von 100 000 bis zu 1 000 000. Das Schaltsymbol ist in Bild III.26 rechts dargestellt. Mit + und – werden der nichtinvertierende und der invertierende Eingang der Differenzverstärkerstufe markiert. Selbstverständlich sind auch Anschlüsse für zumeist zwei Betriebsspannungen, den Massekontakt, die erwähnte Frequenzgangkorrektur oder eine Offsetkompensation notwendig, soweit letztere nicht bereits intern realisiert wurde. Diese Anschlüsse werden jedoch zur Vereinfachung der Schaltpläne zumeist nicht mitgezeichnet. ≡ Differenzverstärker Spannungsverstärker Leistungsverstärker + Schaltsymbol des OPV Bild III.26: Aufbau von Operationsverstärkern 68 A. Thiede Elektronik für den Maschinenbau 4.2. Eigenschaften von OPV Wesentlicher als die Innenschaltung des OPV sind für den Anwender die außen messbaren Eigenschaften des OPV. Die wichtigsten davon sind: • hohe Differenzpannungsverstärkung v • hohe Gleichtaktunterdrückung G • niedrige Offsetspannung Uf • hoher Eingangswiderstand (ideal → ∞) • kleiner Ausgangswiderstand (ideal → 0) • geringe Bandbreite (wenige kHz) Neben den bekannten Begriffen noch zu erläutern ist der bei jedem Differenzverstärker auftretende Offset. Er resultiert aus der Tatsache, dass die stets vorausgesetzte Symmetrie zwischen dem linken und rechten Transistor eines Differenzverstärkers entsprechend Bild III.4 praktisch nie erreicht wird. Daraus resultiert, dass zwischen der beiden Ausgängen eine Spannung entsteht, obwohl die angelegte Eingangsspannung 0 ist. Unter Offsetspannung versteht man nun genau die Eingangsspannung, die man an den Eingang anlegen muss, um die Ausgangsspannung zu 0 zu machen. Sie beträgt typisch einige mV. Bild III.27 zeigt das resultierende Spannungsübertragungsverhalten des OPV. UA + UE - UA Uf UE Bild III.27: Spannungsübertragungsverhalten des OPV 4.3. Grundschaltungen a) Invertierender Verstärker: Für eine grundsätzliche Analyse von Operationsverstärkerschaltungen ist die Kenntnis der genannten Eigenschaften bereits ausreichend. Wenden wir uns zunächst der Invertierenden Grundschaltung zu, die in Bild III.28 gezeigt ist. RN Es sei an dieser Stelle darauf hingewiesen, dass der bei der invertierenden Grundschaltung an die Masse gelegte nichtR1 invertierende Eingang in Schaltplänen oft nicht mitgezeichnet wird. uDiff + ue ua Bild III.28: Invertierende Grundschaltung des OPV Rechenweg1: Gehen wir zunächst von einer endlichen Verstärkung aus. Da in die Eingänge eines OPV kein Strom hineinfließt, lautet der Knotensatz für den Knoten am invertierenden Eingang: 69 A. Thiede Elektronik für den Maschinenbau u e − u Diff u a − u Diff + =0 III.67 R1 RN Mit Hilfe der Beziehung u a = − v Diff ⋅ u Diff III.68 können wir uDiff durch ua ausdrücken und erhalten ⎛u ue ua ua ⎞ III.69 = −⎜ a + + ⎟ R1 ⎝ R N v Diff ⋅ R N v Diff ⋅ R 1 ⎠ Damit ist also die Gesamtverstärkung der Schaltung 1 ua R1 =− III.70 1 1 1 ue + + R N v Diff ⋅ R N v Diff ⋅ R1 Diese Beziehung lässt sich aber beträchtlich vereinfachen, wenn man bedenkt, dass vDiff ja sehr groß ist. Als Grenzwert erhalten wir u R III.71 lim a = − N v Diff → ∞ u R e 1 Rechenweg 2: Dieser Rechenweg, der über eine zunächst relativ umfangreiche Gleichung III.70 auf das einfache Ergebnis von Gleichung III.71 führt, lässt sich beträchtlich abkürzen, wenn man bedenkt, dass die Differenzeingangsspannung eines OPV ja so gut wie 0 sein muss, wenn trotz der riesigen Verstärkung nur Ausgangsspannungen im Bereich weniger Volt auftreten. Man spricht in diesem Fall von einer virtuellen Masse, setzt die Eingangsspannung bei der Netzwerkberechnung zu 0 und nimmt damit faktisch die Grenzwertbildung aus Gleichung III.71 vorweg. Damit erhalten wir statt Gleichung III.67 als Knotensatz ue ua + =0 III.72 R1 R N und damit sofort u R v' = a = − N ue R1 Abschließend sei darauf verwiesen, dass für die Anwendbarkeit des Konzeptes der virtuellen Masse natürlich zwingend erforderlich ist, dass tatsächlich eine Gegenkopplung vorhanden ist, die mit Hilfe der hohen Verstärkung des OPV ja erst erzwingt, dass die Differenzeingangsspannung immer wieder auf praktisch 0 zurückgestellt wird. Ist die Schaltung nicht rückgekoppelt oder liegt gar eine Mitkopplung vor, so sind natürlich auch von 0 ganz wesentlich verschiedene Eingangsspannungen möglich, nur ist die Ausgangsspannung dann durch andere Gegebenheiten wie etwa die Größe der Betriebsspannung begrenzt und sehr viel kleiner als das vDiff-fache der Differenzeingangsspannung. b) Nichtinvertierender Verstärker: Bild 29 zeigt die nichtinvertierende Grundschaltung. Wir erkennen am Ausgang einen durch die Widerstände RN und R1 gebildeten Spannungsteiler, wobei die Teilspannung über dem Widerstand R1 gleich der Eingangsspannung ue sein muss, da wir ja die Differenzeingangsspannung zu 0 annehmen. R1 III.73 u e = u Diff + u R1 = u R1 = u a ⋅ R N + R1 Die Spannungsverstärkung der Gesamtschaltung ist also 70 A. Thiede v' = Elektronik für den Maschinenbau u a R N + R1 = ue R1 III.74 + - RN ue ua R1 Bild III.29: Nichtinvertierende Grundschaltung des OPV 4.4. Anwendungsbeispiele Im Folgenden sollen eine Reihe weiterer nützlicher OPV-Schaltungen angegeben werden, wobei wir die Analyse ohne weitere Kommentare stets auf die gleiche Art und Weise durchführen wollen. Eine Ausnahme bildet lediglich der Komparator, da hier keine Rückkopplung vorgenommen wird. RN R1 u1 u u1 u 2 u + + ... + i + a = 0 R1 R 2 Ri RN R2 u2 - III.75 i uv v =1 R v u a = −R N ⋅ ∑ Ri III.76 ui Bild III.30: Rechenverstärker RN u be ue − ua = i c = I ES ⋅ e UT = I ES ⋅ e UT RN ue < 0 ua u a = R N ⋅ I ES ⋅ e − ue uT III.77 III.78 Bild III.31: Exponentialverstärker R1 ue u be ua − ue = i c = I ES ⋅ e UT = I ES ⋅ e UT R1 ue u a = − U T ⋅ ln R1 ⋅ I ES ua Bild III.32: Logarithmierverstärker 71 III.79 III.80 A. Thiede Elektronik für den Maschinenbau I + - U ref = I ⋅ R1 III.81 U I= ref III.82 R1 Die Steuerung des Konstantstromes ist über die Spannung Uref oder der Widerstand R1 möglich RL Uref R1 Bild III.33: Konstantstromquelle i + A - ohne OPV i ue ue R1 Totzone Bild III.34: Präzisionsgleichrichter Bild III.35: Zur Illustration der Totzone eines Zweiweggleichrichters Bedingt durch die zwar kleine, aber doch existierende Flussspannung der Dioden entsteht, wie in Bild III.35 zusätzlich verdeutlicht, ein Spannungsbereich, indem trotz von 0 verschiedener Spannung kein Strom durch das Amperemeter fließt. Diese kleine Totzone spielt z.B. bei Netzgleichrichtern keine Rolle, kann aber für Präzisionsanwendungen etwa in der Messtechnik störend sein. Die in Bild III.34 gezeigte OPV-Schaltung verringert diese Totzone um den Faktor vDiff, also praktisch auf 0. ue + Uref - ua ua Uref ue Bild III.35: Komparator Für die Realisierung eines Komparators, also einer Schaltung, die eine Spannung mit einer festen Referenzspannung vergleicht und in Abhängigkeit vom Ergebnis des Vergleichs zwischen zwei festen Ausgangsspannungen hin- herschaltet, wird lediglich die hohe Differenzverstärkung des OPV sowohl die Begrenzung seiner Ausgangsspannung ausgenutzt. Die Diode wirken für die kleinen zu vergleichenden Spannungen nicht, schützen den Eingang aber vor zu hohen Eingangsspannungen. Die Widerstände wiederum begrenzen den Strom durch die Dioden. Gegebenenfalls kann für diese Anwendung eine Offsetkompensation notwendig sein. + ua Rp ue ua u+r u-r R1 Bild III.36: Schmitt-Trigger 72 ue u −r = u a min ⋅ R 1 R1 + R p III.83 u+r = u a max ⋅ R 1 R1 + R p III.84 A. Thiede Elektronik für den Maschinenbau Schmitt-Trigger sind Komparatoren mit einer Hysterese, d.h. mit veränderlicher Referenzspannung. Die für das Abschalten notwendige Eingangsspannung u+r liegt entsprechend Bild III.36 über der für das Einschalten notwendigen Spannung u-r. Die Nützlichkeit einer derartigen Schaltung kann man sich am Beispiel eines Dämmerungsschalters vorstellen. Soll am Morgen die Straßenbeleuchtung automatisch abgeschaltet werden, so kann dies erst bei einer Helligkeit erfolgen, die wesentlich höher ist, als die, die am Abend das Einschalten bewirkt. Nur so kann verhindert werden, dass die Beleuchtung an der Schaltschwelle etwa im Rhythmus durchziehender Wolken mehrfach ein- und ausschaltet. C ue ua + t ue ua C t Bild III.37: Abtast-Halte-Glied (Sample and Hold, Track and Hold) Abtast-Halte-Glieder werden, wie in Bild III.37 rechts gezeigt ist, benötigt, um ein zu einem bestimmten Zeitpunkt vorhandenes analoges Signal für eine Periode des Taktes C möglichst konstant zu halten, etwa um in dieser Zeit eine Wandlung in ein digitales Signal vorzunehmen, wie in Kapitel V zu sehen sein wird. Dazu wird ein Kondensator zu einem bestimmten Zeitpunkt auf die Spannung des Analogsignals aufgeladen und danach mit einem durch den Takt C gesteuerten FET-Schalter wieder vom Signal getrennt. Diese Kondensatorspannung soll nun nachfolgenden Schaltungsteilen als Signal so zur Verfügung gestellt werden, dass die Kondensatorladung sich nicht ändert, d.h. ohne dem Kondensator Strom zu entnehmen. Realisierbar ist dies mit der Schaltung entsprechend Bild III.35. Da der FET gesperrt und der Eingangsstrom des OPV 0 sind, bleibt die Ladung des Kondensators erhalten. Trotzdem steht exakt die Spannung des Kondensators am Ausgangs der Schaltung zur Verfügung, wobei hier jedoch in gewissen Grenzen auch beliebig viel Strom entnommen werden kann. 5. Treiberschaltungen Die fortschreitende Miniaturisierung elektronischer Bauelemente erlaubt die Integration immer komplexerer Systeme auf einem einzigen Halbleiterchip. Neben einer Vielzahl bestechender Systemparameter wird die elektrische Leistung dabei zunächst meist negativ erlebt, ist sie doch z.B. für die begrenzte Lebenszeit von Batterien oder die lästige Erwärmung verantwortlich. Andererseits wäre der perfekteste Frequenzgang einer Musikanlage wertlos, wenn nicht Lautsprecher mit ausreichend großer elektrischer Leistung angeschlossen werden könnten. Welchen Sinn könnte wohl eine Motorsteuerung haben, die zwar sehr intelligent eine Vielzahl von Parametern berücksichtigt, aber nicht in der Lage ist, einen Motor mit entsprechend großer elektrischer Leistung anzusteuern. Dieser Abschnitt soll unsere bisherigen Überlegungen daher um einen kleinen Einblick in das Gebiet der Leistungselektronik ergänzen. 73 A. Thiede Elektronik für den Maschinenbau 5.1. Leistungsverstärker a) Verstärkerklassen: Bei Verstärkern unterscheidet man je nach der Lage des Arbeitspunktes verschiedene Klassen. Die bisher betrachteten Verstärker haben wir stets so dimensioniert, dass sie in einem Arbeitspunkt mit hoher Stromverstärkung bzw. Steilheit ein sehr kleines Signal optimal verstärken. Derartige Verstärker heißen Klasse-A-Verstärker und sind hauptsächlich für den Kleinsignalbetrieb geeignet. Sind dagegen die Eingangssignale so groß, dass sie allein in der Lage sind, den Transistor zu öffnen, so kann die zusätzliche Vorspannungen entfallen. Wir sprechen dann von einem Klasse-B-Verstärker. Möglich wäre hier auch eine Mischform mit einer kleinen Vorspannung, die den Transistor aber noch nicht öffnet. Dementsprechend bezeichnet man diese Verstärkerklasse mit AB. Schließlich wird in einem Klasse-CVerstärker der Transistor mit Hilfe der Vorspannung zusätzlich gesperrt, so dass ihn gerade noch die Spitzen eines ausreichend großen Signals öffnen können. Bild III.38 illustriert diese Verstärkerklassen. IC IC A A C B AB B UBE UCE Bild III.38: Arbeitspunkte der Klasse-A, Klasse-AB-, Klasse-B- und Klasse-C-Verstärker b) A-Verstärker: Bisher haben wir die Verstärkung sowie den Ein- und Ausgangswiderstand des in Bild III.39 abgebildeten A-Verstärkers berechnet. Ein für Leistungsanwendungen ganz wesentlicher weiterer Parameter ist jedoch der Wirkungsgrad η, d.h. das Verhältnis der elektrischen Leistung des am Ausgang nutzbaren elektrischen Signals zu der durch die Schaltung aufgenommenen elektrischen Leistung. Stellt man sich am Ausgang eine Sinusschwingung vor, so erreicht diese UCC offensichtlich dann ihre maximale Amplitude, wenn die positive Aussteuergrenze UCC und die negative Aussteuergrenze 0 sind. Im Arbeitspunkt ist RC die Ausgangsspannung also U III.85 U A = CC 2 UA und die tatsächliche Aussteuerung ist ua = m⋅UA III.86 wobei der Aussteuergrad m maximal 1 werden kann. Die von der Spannungsversorgung entnommene Gleichleistung beträgt 2 U CC U CC P= = U CC ⋅ I C = U CC ⋅ = III.87 2R C 2R C Bild III.39: A-Verstärker und die Signalleistung ist 74 A. Thiede Elektronik für den Maschinenbau 2 2 uˆ a ⋅ ˆia uˆ U P = a = m 2 ⋅ CC = m 2 ⋅ = III.88 2 2R C 8R C 4 Somit ergibt sich beim Aussteuerungsgrad von 1 als maximal erreichbarer Wirkungsgrad P III.89 ηmax = ~max = 0.25 P= Dieser sehr ungünstige Wirkungsgrad ergibt sich aus der Tatsache, dass für die Einstellung des Arbeitspunktes ja bereits ohne Anliegen eines Signals ein Strom durch den Widerstand und den Transistor fließt und folglich in diesen Bauelementen zu einem Verlust elektrischer Leistung in Form von Wärme führt. B-Verstärker lassen also bessere Wirkungsgrade erwarten. P~ = c) Gegentakt-B-Verstärker: Gegentaktendstufen findet man z.B. in Verstärkern von Musikanlagen. Da B-Verstärker entsprechend Bild III.38 jeweils nur eine Halbwelle verstärken können, werden wie in Bild III.40 zwei Transistoren im Gegentakt betrieben, wobei die hierfür erforderlichen npn- und pnp-Transistoren eine hohe Symmetrie aufweisen müssen. Aufgrund der Flussspannungen der Basis-Emitter-Dioden treten dabei leichte Verzerrungen auf, da im Übernahmemoment kurzzeitig beide Transistoren sperren, wie in Bild III.40 rechts illustriert. Diese sind bei großen Eingangssignalen jedoch gering und können schaltungstechnisch durch Verschiebung des Arbeitspunktes in den AB-Betrieb reduziert werden. +UB UA UE -UB Bild III.40: Gegentakt-B-Verstärker Der Vorteil des Verstärkers liegt in der reduzierten Gleichleistung. Sie beträgt I 4 I 2 sin ( ωt ) 4 2U B ⋅ ˆia 2U B uˆ a 2 1 4 UB ˆ ˆ P= = ∫ U B ⋅ ia ⋅ cos ( ωt ) ⋅ dt = ⋅ U B ⋅ ia ⋅ III.90 = = ⋅ = ⋅m⋅ T0 T ω 0 π π R π R 4 wobei die Aussteuergrenzen des Signals symmetrisch zu 0 bei +UB und –UB liegen. Berücksichtigt man, dass folglich UB betragsmäßig gerade den halben Wert der beim A-Verstärker gemäß Bild III.39 notwendigen Spannungsversorgung UCC haben muss, so erhält man das gleiche Ergebnis wie in Gleichung III.88 2 2 û a 2 UB =m ⋅ III.91 P≈ = 2R 2R Somit steigt der Wirkungsgrad auf 2 UB P π III.92 ηmax = ~max = 2R 2 = ≈ 0.78 P= 4 2 UB ⋅ π R 75 A. Thiede Elektronik für den Maschinenbau d) Ausgangsschutzschaltung: In Leistungsstufen werden große elektrische Leistungen umgesetzt. Es ist zweckmäßig, zusätzliche Maßnahmen vorzusehen, um diese Schaltungen vor Überlastung z.B. durch einen extern versehentlich herbeigeführten Kurzschluss zu schützen, da diese sehr schnell zur Zerstörung der Endstufe, des ganzen Gerätes oder sogar einem Brand führen könnte. Eine einfache Schutzschaltung zeigt Bild III.41. Der durch den Transistor T1 fließende Kollektor- bzw. Emitterstrom erzeugt über dem Widerstand R einen Spannungsabfall. R wird so gewählt, dass der Spannungsabfall genau dann, wenn dieser Strom eine kritische Größe erreicht, die Basis-Emitter-Diode von Transistors T2 öffnet. U R= F III.93 I max Damit reduziert T2 durch seinen nun fließenden Kollektorstrom den Basisstrom von T1 und begrenzt somit dessen Kollektor- bzw. Emitterstrom. T1 T2 R Bild III.41: Schutzschaltung für Leistungsendstufen 5.2. Elektrische Antriebe Prozessleitebene Führungsgrößen Meldegrößen Informationsverarbeitendes Teilsystem Stellgrößen Netz Rückführgrößen Stromrichter Schalter Motor energetisches Teilsystem Automatisierter Antrieb Informationsfluss Energiefluss Bild III.42: Prinzipieller Aufbau und Einbindung eines automatisierten Antriebs 76 Maschine A. Thiede Elektronik für den Maschinenbau Für die automatische Steuerung einer Maschine ist neben dem informationsverarbeitenden Teilsystem auch ein energetisches Teilsystem notwendig, das entsprechend der vorgegebenen Stellgrößen den Energiefluss von der Energieversorgung zur Maschine zu steuern. Einen Überblick über die komplexen Funktionen eines automatisierten Antriebs und seine Einbindung zeigt Bild III.42. Wir werden uns hier jedoch auf den sogenannten Stromrichter beschränken. Stromrichter fungieren als • Stellglieder (meist der Größe Spannung) Gleichrichter (Wechselstrom → Gleichstrom) • Umformer: Wechselrichter (Gleichstrom → Wechselstrom) Gleichstromsteller (Gleichstrom → Gleichstrom) Wechselstromsteller (Wechselstrom → Wechselstrom) Umrichter (Wechselstrom f1 → Wechselstrom f2) Dioden, MOSFET, Bipolartransistoren, Thyristoren oder IGBT werden lediglich als elektronische Schalter eingesetzt, da dann sowohl im eingeschalteten Zustand P = U⋅I = 0⋅I = 0 III.94 als auch im ausgeschalteten Zustand P = U⋅I = U⋅0 = 0 III.95 die im Schalter umgesetzte elektrische Leistung nahezu 0 ist. Jeder andere Ansatz etwa im Sinne von Abschnitt III.5.1 wäre nicht nur energiewirtschaftlich unsinnig, sondern würde zur Zerstörung der Bauelemente führen und ist deshalb für die hier betrachteten Anwendungen untauglich. Im Schaltmoment selbst tritt jedoch, wie in Bild III.43 dargestellt, kurzzeitig ein Verbrauch elektrischer Leistung auf, da für einen kurzen Moment Strom und Spannung am Schalter gleichzeitig verschieden von 0 sind. Damit ist die mittlere Verlustleistung von der Zahl der Schaltvorgänge pro Zeiteinheit abhängig. UIP UIP t einschalten ausschalten Bild III.43: Zur Entstehung der Verlustleistung im Schaltmoment Neben den genannten Bauelementen, die zur Realisierung der Schalter dienen, werden als passive Bauelemente insbesondere Drosselspulen zur Glättung des zeitlichen Verlaufs der Ströme bzw. zur , Kondensatoren zur Glättung des zeitlichen Reduzierung der zeitlichen Änderung des Stromes di dt und Verlaufs der Spannung bzw. zur Reduzierung der zeitlichen Änderung der Spannung du dt Transformatoren zur Anpassung der Spannungswerte sowie der Potentialtrennung verwendet. Widerstände können hingegen im Unterschied zu analogen Verstärkern nicht in den Hauptstromkreisen verwendet werden, da die großen Ströme zu riesigen Spannungsabfällen und somit zu einem völlig inakzeptablen Energieverlust oder sogar zur Zerstörung der Widerstände führen würden. a) Gleichstrom-Tiefsetzsteller: Das charakteristische, namensgebende Merkmal des Tiefsetzstellers ist der Energietransport vom höheren zum niederen Potential. Die Verwendung eines solchen Tiefsetzstellers als Antriebsstromrichter bzw. als Schaltnetzteil zeigen die Bilder III.44. und 45. Beiden Anwendungen ist gemeinsam, dass bei eingeschaltetem Schalter, wir wollen hierfür künftig exemplarisch einen IGBT verwenden, die Spannungsdifferenz zwischen der Versorgungsspannung U0 und der Spannung Ug zu einem zeitlichen 77 A. Thiede Elektronik für den Maschinenbau Anstieg des Stromes durch die Induktivität L führt. Es wird also, um wieder unsere anschauliche Interpretation der Induktivität zu verwenden, ein Schwungrad in Gang gesetzt. Die Spannung Ug steht dabei für die im Motor bei einer gewissen Drehzahl induzierte Spannung im Falle des Antriebsstromrichters bzw. die Kondensatorspannung im Falle des Schaltnetzteils. Wird der IGBT nun abgeschaltet, so kann der fließende Strom nicht sofort 0 werden. Vielmehr fließt ein allmählich abnehmender Strom über die Diode D gegen die jetzt allein wirksame Spannung Ug . Das Schwungrad rollt gewissermaßen einen Berg hinauf und wird dabei abgebremst. L U0 T Ug M D L T U0 Bild III.44: Gleichstrom-Tiefsetzsteller als Antriebsstromrichter T D Ug C Bild III.45: Gleichstrom-Tiefsetzsteller als als Schaltnetzteil Für beide Anwendungen kann folglich das gleiche, in Bild III.46 gezeigte Ersatzschaltbild verwendet werden. Wir wollen hierbei nur mittelschnelle Vorgänge betrachten. Das bedeutet einerseits, dass wir den IGBT als idealen Schalter auffassen, sein genaues Schaltverhalten und insbesondere die Übernahme des Stromes des IGBT-Zweiges durch die Diode, die sogenannte Kommutierung, nicht näher analysieren. Andererseits gehen wir davon aus, dass in den betrachteten kurzen Zeitabständen sich die Drehzahl des Motors bzw. die Ladung auf dem Kondensator nicht wesentlich ändern können, wir also mit einer konstanten Spannung Ug rechnen können. i2 L = U0 T D u2 Ug = Bild III.46: Einheitliches, vereinfachtes Ersatzschaltbild für Gleichstrom-Tiefsetzsteller Weiterhin wollen wir angesichts der großen zu schaltenden Spannungen die kleine Restspannungen über dem eingeschalteten IGBT bzw. die Flussspannung der Diode vernachlässigen. Schließlich soll auch der Serienwiderstand der Induktivität unberücksichtigt bleiben. Dadurch erhalten wir statt der als Lösung der Differentialgleichung entsprechend Bild I.19 resultierenden exponentiellen Zeitverläufe für den Strom nun einen einfacher zu handhabenden linearen Zeitverlauf, d.h. aus di III.96 L ⋅ 2 + R ⋅ i2 = u 2 − Ug dt folgt für R=0 di 2 u 2 − U g = = const. dt L Wird nun der IGBT jeweils für eine Zeit Te ein- und für eine Zeit Ta ausgeschaltet, so ergeben sich für den zeitlichen Verlauf des Stromes die drei in Bild III.47 farblich markierten Fälle. Fall rot: Die Spannung u2 ist für die Zeit Te gleich U0. Folglich steigt der Strom entsprechend Gleichung III.96 um U − Ug ∆i 2 = 0 ⋅ Te > 0 III.97 L Während Ta ist u2=0 und der Strom sinkt: 78 A. Thiede Elektronik für den Maschinenbau ∆i 2 = −Ug ⋅ Ta < 0 III.98 L Solange der Stromanstieg größer als der Stromabfall ist, steigen also, wenn auch außerhalb des betrachteten Zeitfensters, die Drehzahl des Motors und damit die Spannung Ug. Fall blau: Die Drehzahl und damit die Spannung Ug haben sich soweit erhöht, dass nun Stromanstieg und –abfall gleich groß geworden sind. U0 − Ug U ⋅ Te − g ⋅ Ta = 0 III.99 L L Das Tastverhältnis D bestimmt also wie in Bild III.48 dargestellt die sich einstellende Generatorspannung Ug und damit die Drehzahl des Motors. U Te D= = g III.100 Te +Ta U o Fall grün: Während der Zeit Ta sinkt der Strom auf den Wert 0, d.h. die Diode sperrt ebenfalls und die Spannung U2 ist gleich Ug. Man spricht in diesem Fall von einem lückenden Strom. Wir wollen auf diesen Zustand hier jedoch nicht weiter eingehen. i2 U /U g 0 1 Te t Ta 1 Bild III.47: Zeitlicher Verlauf des Stromes des Gleichstrom-Tiefsetzstellers entsprechend Bild III.46 D Bild III.48: Generatorspannung als Funktion des Tastverhältnisses entsprechend Gleichung III.100 Die Verwendung eines Gleichstrom-Tiefsetzstellers als Antriebsstromrichter erlaubt also die Erhöhung der Motordrehzahl auf einen gewünschten Wert. Sieht man von der praktisch natürlich stets vorhandenen Reibung ab, so erlaubt er jedoch nicht, eine einmal erzielte Drehzahl zu reduzieren, d.h. den Motor abzubremsen. b) Gleichstrom-Hochsetzsteller: Das charakteristische, namensgebende Merkmal des Hochsetzstellers ist der Energietransport vom niederen Potential, d.h. von Ug , zum höherem Potential U0. Er kann somit zum Abbremsen eines Motors eingesetzt werden. Möglich wird dies durch die energiespeichernde Wirkung der Spule. Bildlich kann man sich hier ein Schwungrad vorstellen, das einen Berg hinaufrollt und dabei an Geschwindigkeit verliert. Bild III.49 zeigt das entsprechende Ersatzschaltbild. i2 L = U0 D T u2 Ug = Bild III.49: Vereinfachtes Ersatzschaltbild für Gleichstrom-Hochsetzsteller 79 A. Thiede Elektronik für den Maschinenbau Ist der IGBT eingeschaltet, so fließt angetrieben durch Ug ein mit der Zeit betragsmäßig linear zunehmender Strom durch die Induktivität. Wird der IGBT abgeschaltet, so fließt dieser Strom über die Diode weiter. Es ist nochmals hervorzuheben, dass dieser Strom zwar mit der Zeit betragsmäßig sinkt, jedoch gegen das Potentialgefälle vom niederen Potential zum höherenen Potential U0 fließt. Wir wollen wieder die in Bild III.50 farblich markierten Fälle unterscheiden, wobei darauf hinzuweisen ist, dass der Strom entgegen der vorgegebenen Orientierung fließt, also negativ ist. i2 Ug / U0 Ta Te t 1 D 1 Bild III.51: Generatorspannung als Funktion des Tastverhältnisses entsprechend Gleichung III.104 Bild III.50: Zeitlicher Verlauf des Stromes des Gleichstrom-Hochsetzstellers entsprechend Bild III.49 Die Spannung u2 ist für die Zeit Te gleich 0. Folglich sinkt der Strom entsprechend Gleichung III.96. −Ug ∆i 2 = ⋅ Te < 0 III.101 L Während Ta ist u2=U0 und der Strom steigt um: U − Ug ∆i 2 = 0 ⋅ Ta > 0 III.102 L Solange der Stromabfall größer als der Stromanstieg ist, sinken also, wenn auch außerhalb des betrachteten Zeitfensters, die Drehzahl des Motors und damit die Spannung Ug. Fall blau: Die Drehzahl und damit die Spannung Ug sind soweit gesunken, dass nun der Stromabfall und –anstieg gleich groß geworden sind. U0 − Ug U ⋅ Ta − g ⋅ Te = 0 III.103 L L Wieder bestimmt das Tastverhältnis wie in Bild III.48 dargestellt die sich einstellende Generatorspannung Ug und damit die Drehzahl des Motors. U -U Ug Te D= = 0 g bzw. = 1-D III.104 Te +Ta U0 U0 Fall grün: Während der Zeit Ta steigt der Strom auf den Wert 0, d.h. die Diode sperrt ebenfalls und die Spannung U2 ist gleich Ug . Wir wollen auch hier auf diesen Zustand mit lückendem Strom nicht weiter eingehen. Fall rot: Sehr interessant ist auch die Realisierung von Schaltnetzteilen auf der Basis von GleichstromHochsetzstellern, da sich so Ausgangsspannungen erzeugen lassen, die weit größer als die Gleichspannungsquelle selbst sein können. Eine Anwendung hierfür sind z.B. batteriebetriebene Kofferfernseher. Ausgehend von Bild III.49 müssen wir lediglich, wie in Bild III.52 geschehen, die Einund Ausgangsspannung vertauschen, denn die kleinere Spannungsquelle ist ja jetzt unsere Versorgungsspannung. UL ist die zu erzeugende, größere Spannung, die repräsentiert als Spannung über einer Kapazität wieder für die zu betrachtenden Zeiträume als quasi konstant angenommen werden kann. Bei eingeschaltetem IGBT steigt der Strom i1 angetrieben durch U0 um U III.105 ∆i1 = 0 ⋅ Te > 0 L 80 A. Thiede Elektronik für den Maschinenbau L = i1 D U0 UL T = Bild III.52: Vereinfachtes Ersatzschaltbild für Schaltnetzteil auf der Basis eines Gleichstrom-Hochsetzstellers Nach dem Abschalten des IGBT fließt dieser Strom gegen das Potentialgefälle weiter über die Diode und verringert sich unter der Wirkung von UL um U − UL ∆i1 = 0 ⋅ Ta < 0 III.106 L Im stationären Zustand sind wieder Stromanstieg und –abfall gleich und das Tastverhältnis bestimmt den Wert von UL. Te U -U UL 1 D= = L 0 bzw. = III.107 Te +Ta UL U 0 1-D Die Bilder III.53 und 54 illustrieren in entsprechender farblicher Kodierung den Verlauf des Stromes i1 und die Abhängigkeit der Spannung UL vom Tastverhältnis D. i1 UL / U0 2 Te 1 t Ta D 1 Bild III.54: Ausgangsspannung des Schaltnetzteils als Funktion des Tastverhältnisses entsprechend Gleichung III.107 Bild III.53: Zeitlicher Verlauf des Stromes des Schaltnetzteils entsprechend Bild III.52 Für den praktischen Betrieb ist es wichtig zu verstehen, dass von der auf die Spannung UL geladenen Kapazität nur in sehr begrenzter Weise Strom entnommen werden kann, da die Spannung ja sonst zu stark sinken würde. Insbesondere ist zu bedenken, dass gemäß Gleichung III.107 zwar theoretisch unbegrenzt hohe Ausgangsspannungen erzeugt werden könnten, hierfür aber ein Tastverhältnis sehr nahe bei 1 erforderlich wäre, so dass die Zeit Ta, während der ja die Nachladung der Kapazität erfolgt, gegen 0 geht, und die Belastbarkeit der Spannungsquelle immer geringer wird. c) Zweiquadranten-Gleichstromsteller: T1 D2 i2 U0 D1 T2 Ug Ug II Bild III.55: Zweiquadranten-Gleichstromsteller 81 I i2 A. Thiede Elektronik für den Maschinenbau Wir haben mit dem Gleichstrom-Tiefsetzsteller und –Hochsetzsteller nun eine Möglichkeit gefunden, einen Motor sowohl zu beschleunigen als auch abzubremsen. Deshalb wollen wir beide Schaltungen nun, wie in Bild III.55 bereits geschehen, zu einer Schaltung vereinen, die aus dem im rechten Teil des gleichen Bildes illustrierten Grund als Zweiquadranten-Gleichstromsteller bezeichnet wird. d) Vierquadranten-Gleichstromsteller: Der in Bild III.56 dargestellte Vierquadranten-Gleichstromsteller bietet zusätzlich die Möglichkeit, die Drehrichtung des Motors zu ändern. Ug T1 T4 D2 D 3 Ug II I i2 U0 i2 D1 T2 T3 III D4 IV Bild III.56: Vierquadranten-Gleichstromsteller e) Einphasige Pulswechselrichter: Werden die vier Quadranten zyklisch durchlaufen, kann mit Hilfe des Vierquadranten-Gleichstromstellers eine einphasige Wechselspannung erzeugt werden. f) Dreiphasiger Pulswechselrichter: Ebenso kann mit dem in Bild III.57 dargestellten dreiphasigen Pulswechselrichter eine dreiphasige Wechselspannung erzeugt werden. T1 T3 D2 T5 D4 D6 U0 D1 T2 D3 T4 D5 b a Bild III.57: Dreiphasiger Pulswechselrichter T6 c g) Entlastungsschaltungen: Abschließend wollen wir wenigstens einen Aspekt des bisher als unendlich schnell angenommenen und damit vernachlässigten Schaltvorgangs am IGBT erläutern. Bedenken wir hierzu, dass in Reihe mit dem IGBT stets auch Induktivitäten auftreten, die im Unterschied zu den bisher betrachteten Induktivitäten jedoch parasitär, also ungewollt und äußerst störend sind. Auch sie führen ja im Moment des Abschaltens 82 A. Thiede Elektronik für den Maschinenbau di wegen der schnellen Stromänderung zu großen Spannungen, die den dt Schalter, also in diesem Fall den IGBT zerstören können. Man ergänzt daher die Schaltung wie in Bild III.58 grün markiert zunächst um eine Kapazität parallel zum IGBT, die durch ihren Ladestrom beim Abschalten des IGBT eine stetige Stromänderung bewirkt. Damit die Diode jedoch nur beim Abschalten des IGBT wirksam wird und nicht in gleicher Weise das Einschalten verzögert, wird zu ihr in Reihe eine Diode geschaltet. Nun könnte sich die Kapazität nach dem Einschalten aber nicht wieder entladen und wäre nach einem Schaltvorgang wirkungslos. Daher muss parallel zur Diode schließlich noch ein Widerstand geschaltet werden. R des Stromes entsprechend u=L ⋅ D C Bild III.58: IGBT mit parasitärer Induktivität, ergänzt mit einem RCD-Entlastungsnetzwerk 83