Formelsammlung V2.1
Werbung

Technische Mechanik
Formelsammlung
Vektor- und Tensorrechnung / Indizierte Tensornotation
Orthonormalbasis ~ex , ~ey , ~ez bzw. ~e1 , ~e2 , ~e3
/ ~ei
~ex ⊥ ~ey , ~ex ⊥ ~ez , ~ey ⊥ ~ez
/ ~ei ⊥ ~ej für i 6= j
k~ex k = k~ey k = k~ez k = 1 /
k~ei k = 1 für i = 1, 2, 3
Vektordarstellungen
−
→
→
→
u, −
v, −
w, . . .
vx ~ex + vy ~ey + vz ~ez
−
→
v =
v1 ~e1 + v2 ~e2 + v3 ~e3
vx
v = vy
vz
(Orthogonalität)
(Normiertheit)
(symbolische Schreibweise)
(Komponentenschreibweise)
= vi ~ei
(Spaltenschreibweise)
ui , vj , wk
Linearkombination von n Vektoren
→
→
→
vn
mit
v 2 + . . . + cn −
v 1 + c2 −
c1 −
(Indexschreibweise)
c1 , . . . , cn ∈
R
~ei · ~ej = δij
Skalarprodukt
−
→
→
v ·−
w :=
=
−
→
→−
→
v −
w cos ∢ −
v, →
w
vx wx + vy wy + vz wz = vj wj
→
→
→
→
Das Skalarprodukt ist kommutativ: −
v ·−
w = −
w ·−
v .
Kreuzprodukt
−
→
→
v ×−
w =
=
~ei × ~ej = εijk ~ek
(vy wz − vz wy ) ~ex + (vz wx − vx wz ) ~ey + (vx wy − vy wx ) ~ez
vi wj εijk ~ek
vy wz − vz wy
wx
vx
vy × wy = vz wx − vx wz
vx wy − vy wx
wz
vz
→
→
−
→
Das Kreuzprodukt ist antikommutativ: −
v ×−
w = −→
w ×−
v .
2
Technische Mechanik
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
Mehrfaches Kreuzprodukt
−
→
→
→
u × (−
v ×−
w) =
=
=
un vi wj εijk εnkm ~em
uj vi wj ~ei − ui vi wj ~ej
→
→
→
→
→
→
(−
u ·−
w) −
v − (−
u ·−
v)−
w
( ~ei ~ej ~ek ) = εijk
Spatprodukt
→
→
→
(−
u−
v−
w ) :=
=
=
ux
−
→
−
→
−
→
( u × v ) · w = vx
wx
uy
vy
wy
uz
vz
wz
ux
= uy
uz
wx
wy
wz
ux vy wz + uy vz wx + uz vx wy − ux vz wy − uy vx wz − uz vy wx
ui vj wk εijk
Das Spatprodukt ist alternierend:
(
→
→
→
→
→
→
(−
v−
w−
u ) = (−
w−
u−
v)
−
→
−
→
−
→
( u v w) =
→
−
−
→
−
→
→
−
−
→
−
→
→
→
→
−( u w v ) = −( v u w ) = −(−
w−
v−
u)
Kronecker- und Levi-Cività
à-Symbol
(
1 für i = j
δij :=
vgl. Einheitsmatrix E
0 für i =
6 j
εijk
vx
vy
vz
1 für i j k zyklisch = 1 2 3
:= −1 für i j k zyklisch = 1 3 2
0 sonst
εijk εnkm = εijk εmnk = δim δjn − δin δjm
(zyklisch)
(antizyklisch)
(Kronecker)
(Levi-Cività)
(Entwicklungssatz)
Euklid
Euklidische Vektornorm (Vektorbetrag)
q
q
−
→
v =
vx2 + vy2 + vz2 =
vj2
( j ist gebundener Index!)
Normaxiome
)
−
→
v > 0
−
→
→
v = 0 ⇐⇒ −
v = ~0
−
→
c →
v = | c | −
v
−
→
→
→
→
v +−
w 6 −
v + −
w
(Nichtnegativität)
(Homogenität)
(Dreiecksungleichung)
Technische Mechanik
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
3
Tensorbasis (der N -ten Stufe)
~ei1 ⊗ ~ei2 ⊗ . . . ⊗ ~eiN
oder kürzer
~ei1 ~ei2 . . . ~eiN
Darstellung von Tensoren der Stufe N > 1
−
→
−
→
−
→
−
→
a , B(2) , C(3) , T (N ) , . . .
−
→
= ai ~ei
a
−
→(2)
B
= Bij ~ei ~ej
−
→(3)
= Cijk ~ei ~ej ~ek
C
−
→(N )
T
= Ti1 i2 ...iN ~ei1 ~ei2 . . . ~eiN
a1
B11
a = ... ,
an
B = ...
Bn1
...
..
.
...
ai , Bij , Cijk , . . . , Ti1 i2 ...iN
B1n
..
.
B(nn)
(symbolische Schreibweise)
(Komponentenschreibweise)
(Spalten-/Matrixschreibweise)
Tensorielles Produkt
−
→(N )
−
→
−
→
V
⊗ W(M ) = U (N +M )
−
→
−
→
→
v ⊗ −
w = U (2)
Verjüngendes Produkt (Beispiele)
−
→
→
v
· −
w
= (vi ~ei ) · (wj ~ej )
|{z}
|{z}
=
vi wj ~ei · ~ej
1. Stufe
1. Stufe
= vi w j ~ei δij
=
vi wi
| {z }
(Indexschreibweise)
(allgemein)
(Dyadisches Produkt)
(ι = 1)
0. Stufe
−
→(2)
B
|{z}
2. Stufe
·
−
→
a
|{z}
1. Stufe
=
(Bij ~ei ~ej ) · (ak ~ek )
=
Bij ak ~ei ~ej · ~ek
Bij ak ~ei δjk
Bij aj ~ei
| {z }
=
=
(ι = 1)
1. Stufe
Schema (••) ·· (••)
−
→(2)
−
→(4)
·· |{z}
B
=
T
|{z}
4. Stufe
2. Stufe =
=
=
=
(Tijkℓ ~ei ~ej ~ek ~eℓ ) ·· (Bmn ~em ~en )
Tijkℓ Bmn ~ei ~ej ~ek ~eℓ ·· ~em ~en
Tijkℓ Bmn δℓm ~ei ~ej ~ek ·~en
Tijkℓ Bℓn ~ei ~ej δkn
Tijkℓ Bℓk ~ei ~ej .
|
{z
}
2. Stufe
(ι = 2)
4
(V 2.1)
Technische Mechanik
Schema (••) : (••)
−
→(2)
−
→(4)
: |{z}
B
=
T
|{z}
4. Stufe
2. Stufe =
=
=
=
Prof. Dr.-Ing. F. Mestemacher
(Tijkℓ ~ei ~ej ~ek ~eℓ ) : (Bmn ~em ~en )
(ι = 2)
Tijkℓ Bmn ~ei ~ej ~ek ~eℓ : ~em ~en
Tijkℓ Bmn δkm ~ei ~ej ~eℓ ·~en
Tijkℓ Bkn ~ei ~ej δℓn
Tijkℓ Bkℓ ~ei ~ej .
|
{z
}
2. Stufe
→
−
→
−
→(N ) (ι) −
· V (M ) = W(N +M −2ι)
U
mit ι ∈ { ι ∈
N | ι 6 (N + M )/2 }
Überschiebung (Beispiele)
vi wi = c
Bij vj = ui
Tijkℓ Bℓk = Wij
bzw.
Tijkℓ Bkℓ = Wij
Transformationen
v∗
v
= A v
= A ∗ v∗
/ vi∗
/ vj
= aij vj
= a∗jk vk∗
)
(Koordinatentransformation)
A∗ = A−1
bzw. A A∗ = A∗ A = E
/
aij a∗jk = δik
A∗ = AT ,
det A∗ = det A = ± 1
/
a∗ji = aij
~e∗i
~ej
= aij ~ej
= a∗jk ~e∗k
)
(allgemein)
(orthogonal)
(Basistransformation)
Statik der Starrkörper
Zusammenfassung von Kräften/Momenten zu Resultierenden“
”
X−
→
−
→
Fi [A]
(Resultierende Kraft im Punkt A)
R [A] =
i
X−
→
−
→
Mi [A]
MR [A] =
(Resultierendes Moment bezügl. Punkt A)
i
−
→
Mi [A] =
−
→
−
→
→
ri − −
rA × Fi
−
→
(Moment der Kraft Fi bezügl. Punkt A)
−
→
→
Der Ortsvektor −
ri beschreibt den Angriffspunkt der Kraft Fi . Der Bezugspunkt
A ist frei wählbar! Er ist nur bedeutsam für die Momentenwirkung von Kräften.
(V 2.1)
Technische Mechanik
Prof. Dr.-Ing. F. Mestemacher
Kräftegleichgewicht(KG)
−
→
−
→
R = 0
X
Fx,i = 0 ,
X
Fy,i = 0 ,
(vektoriell)
X
Fz,i = 0
(komponentenweise)
i
i
i
Momentengleichgewicht(MG) um beliebigen Bezugspunkt
−
→
−
→
MR = 0
X
Mx,i = 0 ,
X
My,i = 0 ,
i
i
5
X
Mz,i = 0
(vektoriell)
(komponentenweise)
i
Statische Bestimmtheit
Notwendige Bedingung für ebene/räumliche Körpersysteme
)
2
> 0 k-fach statisch unbestimmt
: t + r − 3p
= k
=0
statisch bestimmt
3
: t + r − 6p
< 0 |k|-fach kinematisch verschieblich
E
E
mit
t
r
=
=
Anzahl der Lagerreaktionen
Anzahl der Zwischenreaktionen (an den Verbindungsstellen)
p
=
Anzahl der Teilkörper
Notwendige Bedingung für ebene/räumliche Fachwerke
)
2
> 0 k-fach statisch unbestimmt
: t + s − 2g
= k
=0
statisch bestimmt
3
: t + s − 3g
< 0 |k|-fach kinematisch verschieblich
E
E
mit
t
=
Anzahl der Lagerreaktionen
s
g
=
=
Anzahl der Stäbe
Anzahl der Gelenke
Notwendig und hinreichend für statische Bestimmtheit ist, daß das (inhomogene)
lineare Gleichungssystem
Ax = b
eine eindeutige Lösung x besitzt. Das ist – ingenieurmäßig gesehen – der Fall, wenn
die Koeffizientenmatrix A quadratisch und regulär (det A 6= 0) ist. (Allgemein ist
Rg (A| b) = Rg (A) zu fordern!)
6
(V 2.1)
Technische Mechanik
Prof. Dr.-Ing. F. Mestemacher
Schwerpunkte
−
→
rS =
−
→
rS =
−
→
rS =
n
1 X
→
ri
mi −
m i=1
Z
1
m
1
A
−
→
r dm
K
Z
(Schwerpunkt aus n Massenpunkten mi )
ρ0
=
1
V
Z
−
→
r dV
(Körperschwerpunkt)
V
−
→
r dA
(Flächenschwerpunkt)
A
ρ0
Die Relation = bedeutet Gleichheit unter Voraussetzung homogenen Materials mit
ρ (x, y, z) ≡ ρ0 = const.
Haftung (auch: Haft reibung“)
”
R0 6 µ0 N
(Haftungsbedingung)
R0,max = µ0 N
(Grenzfall)
tan α 6 µ0
S2 6 S1 eµ0 α
( Reib“-Kegel)
”
für
S2 > S1
(Seilhaftung am Zylinder)
Haftkräfte sind Reaktionskräfte!
Reibung (auch: Gleitreibung)
−
→
−
→
v
R = −µN −
= µ N (−~ev )
k→
vk
R = µN
S2 = S1 eµ0 α
mit
für
µ < µ0
S2 > S1
(vektoriell)
(betragsweise)
(Seilreibung am Zylinder)
Reibkräfte sind eingeprägte Kräfte!
Der Umschlingungswinkel α ist grundsätzlich im Bogenmaß einzusetzen und kann
auch > 2π (Mehrfachumschlingung) sein!
Vorzeichenregel für Schnittgrößen
Am positiven (negativen) Schnittufer sind die Schnittgrößen in positiver (negativer) Richtung anzutragen!
(V 2.1)
Technische Mechanik
Prof. Dr.-Ing. F. Mestemacher
7
Elastostatik
Spannungszustand
−
→
σ (2) = σij ~ei ~ej
σx
σ = τyx
τzx
(Spannungstensor)
τxy
σy
τzy
τxz
σ11
τyz = σ21
σz
σ31
σ13
σ23
σ33
σ12
σ22
σ32
(Spannungsmatrix)
Gleichgewichtsbedingungen
−
→
−
→
→
∇· −
σ (2) + f = 0
(KG)
∂τyx
∂τzx
∂σx
+
+
+ fx
∂x
∂y
∂z
= 0
∂τxy
∂σy
∂τzy
+
+
+ fy
∂x
∂y
∂z
= 0
∂τyz
∂σz
∂τxz
+
+
+ fz
∂x
∂y
∂z
= 0
∂σji
+ fi
∂xj
= 0
σ = σT
/
oder
σji,j + fi = 0
σij = σji
(MG)
Cauchy
Cauchysche Spannungsgleichung
−
→
−
→
→
σ (2) · −
n = t
σ n = t
/ σij nj = ti
oder ausgeschrieben
σx
τyx
τzx
τxy
σy
τzy
nx
tx
τxz
τyz ny = ty
nz
tz
σz
Hauptspannungen
(HauptachsenHA
→
~ej −→ ~ek+ so, daß −
σ (2) = σ1 ~e1+~e1+ + σ2 ~e2+~e2+ + σ3 ~e3+~e3+
transformation)
σ+
σI
= 0
0
0
σII
0
0
σ1
0 = 0
σIII
0
0
σ2
0
0
0
σ3
(Hauptspannungsmatrix)
8
Technische Mechanik
σ−σE
n = 0
det σ − σ E
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
/ (σij − σ δij ) nj = 0
(Ansatz)
= 0 / det ( σij − σ δij ) = 0
σ 3 − I1 σ 2 + I2 σ − I3 = 0
I1 := σx + σy + σz = sp σ = σii
2
2
2
I2 := σx σy + σy σz + σx σz − τxy
− τyz
− τxz
=
1
2
(σii σjj − σij σij )
/ σ1 , σ2 , σ3
σ − σ E n = 0
k n k =
q
/
/
(Invarianten)
(Eigenwerte = Hauptspannungen)
(σij − σ(k) δij ) n(k)j = 0
n2x + n2y + n2z = 1
nI , nII , nIII
(Charakteristische Gl.)
I3 := det σ = det (σij )
σI , σII , σIII
)
.
→
k−
nk k =
−
→
n k = nkj ~ej = ~ek+
= I, II, III
q
2
= 1
n(k)j
(Eigenvektoren = Basisvektoren
der Hauptachsen)
Mohrscher Spannungskreis für den ebenen Spannungszustand
2
2
σx − σy
σx + σy
2
+ τxy =
σ −
2
2
|
{z
}
|
{z
}
R2
X2
+
τ2
| {z }
Y2
(Kreisgleichung)
Technische Mechanik
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
σ(ϕ) = σx cos2 ϕ + 2 τxy cos ϕ sin ϕ + σy sin2 ϕ
τ (ϕ) = (σy − σx ) cos ϕ sin ϕ + τxy
cos ϕ − sin ϕ
2
2
)
9
(Parameterdarstellung)
Verzerrungszustand
−
→
u = u ~ex + v ~ey + w ~ez = ui ~ei
(Verschiebungsvektor)
(L0 + ∆L) − L0
∆L
=
L0
L0
∂u
=
∂x
∂v
=
∂y
∂w
=
∂z
ε :=
εx
εy
εz
∂v
∂u
+
∂y
∂x
∂w
∂v
+
=
∂z
∂y
∂w
∂u
+
=
∂z
∂x
γxy = γyx =
γyz = γzy
γxz = γzx
(eindimensionale Dehnung)
(Dehnungen)
(Scherungen oder Gleitungen)
−
→
ǫ (2) = εij ~ei ~ej
εx
ǫ = 21 γyx
1
2 γzx
εij
1
=
2
ǫ = ǫT
(Verzerrungstensor)
εy
1
2 γxz
1
2 γyz
1
2 γzy
εz
1
2 γxy
∂ui
∂uj
+
∂xj
∂xi
/
εij = εji
ε11
ε12
ε13
= ε21
ε22
ε23
ε31
ε32
(Verzerrungsmatrix)
ε33
und speziell εij =
1
γij
2
für i 6= j
(Symmetrie)
Elastizität
σ = Eε
(Hookesches Gesetz)
10
(V 2.1)
Technische Mechanik
−
→
−
→
→
σ (2) = E (4) : −
ǫ (2)
Prof. Dr.-Ing. F. Mestemacher
/ σij = Eijkℓ εkℓ
σij = λ εkk δij + 2 µ εij
λ =
(verallgemeinertes Hookesches Gesetz)
νE
,
(1 + ν) (1 − 2ν)
µ = G =
1+ ν
ν
σx,y,z −
I1
E
E
εx,y,z =
1
τxy
G
1
τyz
=
G
1
τxz
=
G
γyx =
γyz
γxz
(allg. Elastizitätsgesetz)
E
2 (1 + ν)
εij =
(Lamésche Konstanten)
ν
1+ν
σij −
σkk δij
E
E
Festigkeitshypothesen
h
i
σV = max σI − σII , σII − σIII , σI − σIII 2
2 σV
=
σV
=
=
=
σI − σII
q
q
2
+ σII − σIII
2
+ σI − σIII
2
(Tresca)
(Huber – v. Mises)
2 + τ2 + τ2 )
σx2 + σy2 + σz2 − σx σy − σy σz − σx σz + 3 (τxy
yz
xz
I12 − 3 I2
q
3
2
1
2
σij σij −
σii σjj
σV = max σI , σII , σIII
(Normalspannungshypothese)
Zusammenhang zwischen Spannungen und Schnittgrößen
N (x) =
Z
σx dA =
A
Qy (x) =
Z
ZZ
τxy dA =
Qz (x) =
A
(Normalkraft)
ZZ
τxy (x, y, z) dy dz
(Querkraft in y-Richtung)
ZZ
τxz (x, y, z) dy dz
(Querkraft in z-Richtung)
A
A
Z
σx (x, y, z) dy dz
A
τxz dA =
A
Technische Mechanik
MBy (x) =
(V 2.1)
Z
σx z dA =
Z
σx y dA =
A
MBz (x) =
Z
ZZ
(Biegemoment um
die y-Achse)
σx (x, y, z) y dy dz
(Biegemoment um
die z-Achse)
A
ZZ
(τxz y − τxy z) dA =
ZZ
A
A
11
σx (x, y, z) z dy dz
A
A
MT (x) =
Prof. Dr.-Ing. F. Mestemacher
τxz (x, y, z) y − τxy (x, y, z) z dy dz
(Torsionsmoment um die x-Achse)
Axialdehnung gerader, prismatischer Stäbe
∆ℓ =
Fℓ
EA
(Verlängerung/Verkürzung)
Kesselformeln
σϕ =
d
∆p
2s
(Tangentialspannung)
σz =
d
∆p
4s
(Axialspannung)
Flächenträgheitsmomente
Iy =
Z
z 2 dA
(Axiales Flächenträgheitsmoment um die y-Achse)
Z
y 2 dA
(Axiales Flächenträgheitsmoment um die z-Achse)
A
Iz =
A
Iyz = −
Z
y z dA
(Deviationsmoment)
A
I0 =
Z
r2 dA = Iz + Iy
(Polares Flächenträgheitsmoment)
A
(Ebene) Bernoulli
Bernoullische Balkenbiegung
EIy w′′ = − M (x)
mit
w′′ :=
d2 w
dx 2
(DGl der Biegelinie)
12
Technische Mechanik
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
M (x)
EIy
Z
1
′
w (x) = −
M (x) dx + c⋆
EIy
w′′ (x) = −
w(x) = −
Z Z
1
EIy
(Tangentenverlauf)
M (x) dx dx + c⋆ x + c⋆⋆
(Biegelinie)
w(x = xν ) = 0
(RB 1. Art für die Lagerstelle x = xν )
w′ (x = xν ) = 0
(RB 2. Art für die Lagerstelle x = xν )
wlinks (x = xµ ) =
′
wlinks (x = xµ ) =
wrechts (x = xµ )
′
wrechts
(x = xµ )
(ÜB’en an der Bereichsgrenze x = xµ )
M (x)
z
Iy
σx (x, z) =
(Normalspannungsverlauf)
z(x, y) ≡ 0
(neutrale Faser mit σx (x, y, z) ≡ 0)
|M (x)|max
|M (x)|max
|z|max =
Iy
Wy
| σx |max =
(max. Normalspannung)
(Räumliche) Bernoulli
Bernoullische Balkenbiegung,
E[
Iy w′′ − Iyz v ′′ ] =
E [ − Iyz w
′′
mit w′′ :=
′′
+ Iz v ]
d2 w
,
dx 2
E w′′
=
1
∆
E v ′′
=
1
∆
=
v ′′ :=
− MBy (x)
z(x, y) =
(DGl’en der räumlichen Biegelinie)
MBz (x)
d2 v
dx 2
−MBy (x) Iz + MBz (x) Iyz
−MBy (x) Iyz + MBz (x) Iy
2
mit ∆ := Iy Iz − Iyz
= II III
σx (x, y, z) =
Schiefe“ Biegung
”
(entkoppeltes DGl-System)
i
1 h
MBy (x) Iz − MBz (x) Iyz z + MBy (x) Iyz − MBz (x) Iy y
∆
(Normalspannungsverlauf)
MBz (x) Iy − MBy (x) Iyz
y
MBy (x) Iz − MBz (x) Iyz
(neutrale Faser mit σx (x, y, z) ≡ 0)
Technische Mechanik
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
13
| σx |max liegt in dem Punkt (des Querschnitts mit |MBy (x)|max ) vor, welcher am
weitesten von neutralen Faser entfernt ist!
Bereichseinteilung und RB/ÜB’en sind analog zum ebenen Fall zu formulieren!
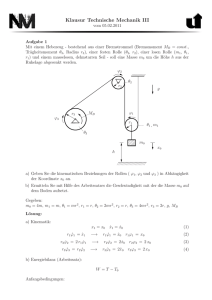
Euler
Eulersche Knickfälle
Stablänge ℓ
1
2
π 2 EI
4 ℓ2
π 2 EI
ℓ2
3
4
(im ungeknickten Zustand)
Euler
Euler-Fall
Fkrit =
20,19
EI
ℓ2
4π 2 EI
ℓ2
Torsion einer Welle mit Kreis(ring)querschnitt
GI0 ϑ′ = MT (x)
ϑ′ (x) =
MT (x)
GI0
ϑ(x) =
1
GI0
Z
mit
ϑ′ :=
MT (x) dx + c⋆
ϑ(x = xν ) = 0
ϑlinks (x = xµ ) = ϑrechts (x = xµ )
τ (x, r) =
MT (x)
r
I0
dϑ
dx
(DGl des Torsionsverlaufs)
(Torsionsverlauf)
(RB für die Lagerstelle x = xν )
(ÜB an der Bereichsgrenze x = xµ )
(Schubspannungsverlauf)
14
Technische Mechanik
τmax =
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
|MT (x)|max
|MT (x)|max d
=
I0
2
WT
(max. Schubspannung)
Dynamik
Bahnkurve
−
→
→
r = −
r (t) = x(t) ~ex + y(t) ~ey + z(t) ~ez = xi (t) ~ei
(kartesisch)
s = s(t)
→
| ds | = k d−
rk =
(Bahnkoordinate)
q
ẋ2j (t) dt
(Bogenelement)
Geschwindigkeit
dy
dz
dx
~ex +
~ey +
~ez
−
→
dt
dt
dt
dr
−
→
v (t) =
=
ẋ ~ex + ẏ ~ey + ż ~ez
dt
vx ~ex + vy ~ey + vz ~ez
−
→
v (t) = v(t) ~et s(t) ,
v(t) =
dr
dt
dxi
~ei
dt
= ẋi ~ei
=
=
(kartesisch)
vi ~ei
→
| v | = k−
vk =
q
ẋ2j (t)
(Bahnkurve)
Beschleunigung
−
d→
v
dvx
~ex
=
d
t
dt
= v̇x ~ex
−
→
ax ~ex
a (t) =
→
2−
2
d r = d x ~e
x
d t2
dt2
= ẍ ~ex
dvy
dvz
~ey +
~ez
dt
dt
+ v̇y ~ey + v̇z ~ez
+
+
+
+
ay ~ey +
az ~ez
d2y
d2z
~
~ez
e
+
y
dt2
dt2
ÿ ~ey + z̈ ~ez
i
dv
v2
dh
−
→
~et +
~en
=
v(t) ~et s(t)
a (t) =
dt
dt
R
=
dvi
~ei
dt
v̇i ~ei
=
ai ~ei
=
(kartesisch)
d2xi
~ei
dt2
= ẍi ~ei
=
(Bahnkurve)
at =
dv
dt
(Tangential- oder Bahnbeschleunigung)
an =
v2
R
(Normal- oder Zentripetalbeschleunigung)
(V 2.1)
Technische Mechanik
Prof. Dr.-Ing. F. Mestemacher
15
Begleitendes Dreibein
~et =
→
d−
r
ds
(Tangenteneinheitsvektor)
→
→
s /ds2
d2 −
r
d2 −
d~et
=
= R
−
→
ds
ds 2
kd2 s /ds2 k
~en = R
(Hauptnormalenvektor)
~eb = ~et × ~en
(Binormalenvektor)
Es zeigt ~et in Richtung wachsender s -Werte, während ~en auf den Krümmungsmittelpunkt gerichtet ist. Die Orientierung von ~eb ergibt sich aus Forderung nach
einem Rechtssystem.
Winkelgeschwindigkeit
dϕy
dϕz
dϕx
~ex +
~ey +
~ez
dt
dt
dt
−
→
ω(t) =
ϕ̇x ~ex + ϕ̇y ~ey + ϕ̇z ~ez
ωx ~ex + ωy ~ey + ωz ~ez
−
→
ω(t) = ω(t) ~eD ,
ω(t) =
dϕ
dt
=
dϕi
~ei
dt
=
ϕ̇i ~ei
=
ωi ~ei
(kartesisch)
(Rotation um feste Drehachse(=D))
Geschwindigkeit bei Rotation um festen Punkt
→
−
→
→
v = −
ω × −
r
(vektoriell)
v = ωr
~e˙ x
~e˙ y
=
~e˙ z
=
(Bahngeschwindigkeit bei Rotation um feste Drehachse)
−
→
ω × ~ex
−
→
ω × ~ey
−
→
ω × ~e
=
z
→
~e˙ i = −
ω × ~ei
(rotierende Vektorbasis)
Relativkinematik
−
→
r
=
−
→
r0
xi (t) ~ei
= x0j (t) ~ej
−
→
v
=
−̇
→
r0
ẋi ~ei
=
ẋ0j ~ej
+
−
→
r∗
+
x∗k (t) ~e∗k (t)
−
→
→
ω ×−
r∗
→
+ −
ω × x∗k ~e∗k
+
+
(Ort)
−
→
v∗
+ ẋ∗k ~e∗k
(Geschwindigkeit)
16
Technische Mechanik
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
−̇
→
→
→
→
→
→
→
→
ω ×−
r∗ + −
ω× −
ω×−
r∗
+ 2−
ω× −
v∗ + −
a∗
→
→
→
→
ω × x∗k ~e∗k + −
ω× −
ω × x∗k ~e∗k + 2 −
ω × ẋ∗k ~e∗k + ẍ∗k ~e∗k
ẍi ~ei = ẍ0j ~ej + −̇
−
→
a
=
−̈
→
r0
+
(Beschleunigung)
mit
Ort
AbsolutGeschwindigkeit
Beschleunigung
−
→
r (t) = xi (t) ~ei
−
→
v (t) = vi (t) ~ei = ẋi ~ei
−
→
a (t) = ai (t) ~ei = ẍi ~ei
Führungsgeschwindigkeit
→
→
−̇
→
→
r0 + −
ω×−
r ∗ = ẋ0j ~ej + −
ω × x∗k ~e∗k
Führungsbeschleunigung
→
→
→
−̈
→
→
→
r0 + −̇
ω×−
r∗ + −
ω× −
ω×−
r∗ =
Ort
RelativGeschwindigkeit
Beschleunigung
Coriolis-Beschleunigung
−
→
r ∗ (t) = x∗k (t) ~e∗k (t)
−
→
v ∗ (t) = vk∗ (t) ~e∗k (t) = ẋ∗k ~e∗k (t)
−
→
a ∗ (t) = a∗k (t) ~e∗k (t) = ẍ∗k ~e∗k (t)
→
→
→
ω × x∗k ~e∗k
= ẍ0j ~ej + −̇
ω × x∗k ~e∗k + −
ω× −
→
−
→
2−
ω×−
v∗ = 2 →
ω × ẋ∗k ~e∗k
Körperfeste Ableitung
i
d ∗ ∗
d∗ −
d∗ h ∗
→
→
xk (t) ~e∗k (t) =
x (t) ~ek = ẋ∗k ~e∗k = −
v ∗ (t)
r ∗ (t) =
dt
dt
dt k
i
d∗ −
d∗ h ∗
d ∗ ∗
→
→
v ∗ (t) =
ẋk (t) ~e∗k (t) =
ẋ (t) ~ek = ẍ∗k ~e∗k = −
a ∗ (t)
dt
dt
dt k
Bei dieser Operation wird also die Zeitabhängigkeit der Relativbasis ~e∗k (t) definitionsgemäß ignoriert, so wie es der Sichtweise des mitbewegten Beobachters
entspricht!
Newton
Newtonsches Grundgesetz (im Inertialsystem)
−
→
X−
d −
→
dI
m→
v
=
Fi =
dt
dt
i
(allgemein)
→
X−
→
d−
v
→
= m−
a
Fi = m
dt
i
X
i
Fx,i = m ẍ ,
X
i
Fy,i = m ÿ ,
(Standardfall für m(t) ≡ const)
X
i
Fz,i = m z̈
(komponentenweise)
Technische Mechanik
X
(V 2.1)
Ft,i = m at = m
i
Prof. Dr.-Ing. F. Mestemacher
dv
,
dt
X
Fn,i = m an = m
i
v2
R
17
(Bahnkurve)
Newton
Newtonsches Grundgesetz im Relativsystem
X−
→
→
−
−
→
−
→
−
→
Fi + Ftr + Frot + FZ + FC
|
{z
}
i
Scheinkräfte
→
= m−
a∗
−
→tr
→
F
= − m −̈
r0
(translat. Trägheitskraft)
−
→rot
→
→
F
= − m −̇
ω×−
r∗
(rot. Trägheitskraft)
−
→Z
→
→
→
F
= −m −
ω× −
ω×−
r∗
(Zentrifugalkraft)
−
→C
F
→
→
= − 2m −
ω×−
v∗
(Führungskraft)
(Coriolis-Kraft)
Gedämpftes Feder-Masse-System mit harmonischer Kraftanregung
ẍ + 2 D ẋ + ω02 x =
F0
sin [ Ω t ]
m
ẍh + 2 D ẋh + ω02 xh = 0
(lineare Bewegungs-DGl)
(zugehörige homogene DGl)
xh (t) = eλt
(Ansatz)
λ2 + 2 D λ + ω02 = 0
(Charakteristische Gleichung)
λ1,2 = − D ±
q
D2 − ω02
(Eigenwerte der homogenen DGl)
x1 (t) = eλ1 t ,
x2 (t) = eλ2 t
(Basislösungen der homogen. DGl)
xh (t) = c1 x1 (t) + c2 x2 (t)
( Homogene“ Lösung)
”
a) Zwei reelle Eigenwerte λ1 6= λ2
λ1,2 = − D ±
q
D2 − ω02
xh (t) = c1 eλ1 t + c2 eλ2 t
∈
R
D2 > ω02
18
Technische Mechanik
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
D2 = ω02
b) Ein (doppelter) reeller Eigenwert λ1 = λ2
λ1,2 = − D ∈
R
xh (t) = c1 eλ1 t + c2 t eλ2 t = ( c1 + c2 t ) e−Dt
D2 < ω02
c) Konjugiert komplexe Eigenwerte
λ1,2 = − D ± j ω1 ∈
xh (t)
C
mit
ω1 :=
q
ω02 − D2
= c∗1 exp (−D + j ω1 ) t + c∗2 exp (−D − j ω1 ) t
= e−D t c∗1 e j ω1 t + c∗2 e−j ω1 t
= e−D t
c∗1 + c∗2 cos [ ω1 t ] + j c∗1 − c∗2 sin [ ω1 t ]
= e−D t c1 cos [ ω1 t ] + c2 sin [ ω1 t ]
F0
Faustregelansatz für
sin [ Ω t ]
m
xp (t) = A sin [ Ω t ] + B cos [ Ω t ]
x(t) = e−D t
|
H :=
m
p
ϕ = arccos
c1 cos [ ω1 t ] + c2 sin [ ω1 t ] + H sin [ Ω t − ϕ ]
|
{z
}
{z
}
=
x
(t)
p
= xh (t) D2 < ω2
0
F0
(2 DΩ)2 + ( ω02 − Ω 2 )2
"
p
ω02 − Ω 2
(2 DΩ)2 + ( ω02 − Ω 2 )2
#
Sonderfall: Keine Anregung (F0 = 0)
H = 0,
xp (t) ≡ 0
x(t) ≡ xh (t) = e−D t c1 cos [ ω1 t ] + c2 sin [ ω1 t ]
Sonderfall: Keine Dämpfung (D = 0)
ω1 = ω0 ,
xh (t) = c1 cos [ ω0 t ] + c2 sin [ ω0 t ]
(abklingende
Schwingung)
Technische Mechanik
(V 2.1)
F0
,
H =
2
m ω0 − Ω 2 Achtung!
ϕ =
H → ∞ für
Prof. Dr.-Ing. F. Mestemacher
(
0
π
19
für Ω < ω0
für Ω > ω0
Ω → ω0
(Resonanzfall)
x(t) = c1 cos [ ω0 t ] + c2 sin [ ω0 t ] + H sin [ Ω t − ϕ ]
Sonderfall: Keine Anregung und keine Dämpfung
x(t) ≡ xh (t)
= c1 cos [ ω0 t ] + c2 sin [ ω0 t ]
= A cos [ ω0 t − ε ]
(ungedämpfte
Dauerschwingung)
Hauptsätze der Körperdynamik
−
→
X−
→
dI
Fν =
dt
ν
−
→
I :=
Z
−
→
→
v dm = m −
vS
(Impulssatz)
(Impuls)
K
→
X−
→
d−
vS
Fν = m
dt
ν
−
→
X−
X−
→
−
→
dL0
→
Mν [ 0 ] =
r0ν × Fν =
dt
ν
ν
−
→
L0 :=
Z
−
→
→
r0m × −
v 0m dm
K
−
→
X−
X
→
−
→
dLS
−
→
Mν [ S ] =
rSν × Fν =
dt
ν
ν
−
→
LS :=
Z
(Schwerpunktsatz)
(Impulsmomentensatz bezügl.
raumfestem (Lager-)Punkt 0)
(Impulsmoment bezügl.
raumfestem (Lager-)Punkt 0)
(Impulsmomentensatz bezügl.
(bewegtem) Schwerpunkt S)
−
→
→
rSm × −
v Sm dm
(Impulsmoment bezügl.
(bewegtem) Schwerpunkt S)
−
→
−
→
→
→
L0 = LS + m −
r0S × −
v 0S
(Zusammenhang zwischen
den Impulsmomenten)
K
20
(V 2.1)
Technische Mechanik
Prof. Dr.-Ing. F. Mestemacher
Einachsige Rotation (x3 -Achse sei Drehachse (=D))
−
→
ω = ω ~e3 = ϕ̇ ~e3
−
→
L0 = J13 ω ~e1 + J23 ω ~e2 + JD ω ~e3
P
P
P
i
Mν,1 [ 0 ] = J13 ϕ̈ − J23 ϕ̇2
i
Mν,2 [ 0 ] = J23 ϕ̈ + J13 ϕ̇2
i
Mν,3 [ 0 ] =
JD = J33 :=
Z
K
P
x21
ν
+
Mν [ D ] = JD ϕ̈
x22
dm =
Z
r2 dm
(Massenträgheitsmoment)
K
Hier ist r der (Orthogonal-)Abstand von dm zur Drehachse!
J13 := −
Z
J23 := −
Z
x1 x3 dm
K
(Deviationsmomente)
x2 x3 dm
K
Häufiger Sonderfall: Rotor ist dynamisch ausgewuchtet (J13 = J23 = 0)
−
→
→
L0 = JD −
ω
P
ν Mν,1 [ 0 ] = 0 ,
J0 = JS + m s2
P
ν
Mν,2 [ 0 ] = 0 ,
P
ν
Mν [ D ] = JD ϕ̈
(Satz von Steiner)
Das Massenträgheitsmoment JS ist immer das kleinstmögliche!
Mehrachsige Rotation (allgemeiner Fall)
Es gelten gleichermaßen für den raumfesten (Lager-)Punkt 0 mit
→
−
→ −
L0 , J0(2)
0
/ L0i , Jij
sowie für den (bewegten) Schwerpunkt S mit
→
−
→ −
LS , JS(2)
/
S
LSi , Jij
(unter Fortlassung der Indizes 0 bzw. S) die folgenden Gleichungen:
(V 2.1)
Technische Mechanik
Prof. Dr.-Ing. F. Mestemacher
21
−
→
ω = ω1 ~e1 + ω2 ~e2 + ω3 ~e3 = ωj ~ej
−
→
L = Li ~ei
(Impulsmomentenvektor)
−
→(2)
= Jij ~ei ~ej
J
Jij :=
Z
K
(Trägheitstensor)
Z
(x2k δij − xi xj ) dm =
(Massenmomente
2. Ordnung)
(r2 δij − xi xj ) dm
K
Hier ist r mit
x2k
=
x21
+
x22
x23
+
=: r
2
=
(
→
k−
r0m k2
→
k−
r k2
Sm
der Abstand von dm zum Punkt 0 bzw. S. Im einzelnen sind:
J11 =
Z
K
J22 =
Z
K
J33 =
Z
K
x22
+
x23
dm
x21 + x23 dm
x21 + x22 dm
J12 = J21 = −
Z
x1 x2 dm
Z
x1 x3 dm
Z
x2 x3 dm
K
J13 = J31 = −
K
J23 = J32 = −
K
J11
J = J21
J31
J12
J22
J32
−
→
−
→
→
L = J (2) · −
ω /
L = J ω
J13
J23
J33
(Massenträgheitsmomente)
(Deviationsmomente)
(Trägheitsmatrix)
Li = Jij ωj
oder ausgeschrieben
L1
J11
L2 = J21
L3
J31
J12
J22
J32
J13
ω1
J23 · ω2
J33
ω3
22
Technische Mechanik
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
X−
d⋆ −
−
→
→
→
→
ω × L 0/S
L 0/S + −
Mν [ 0/S ] =
dt
ν
X
Mν,i = Jij ω̇j + Jkℓ ωℓ ωn εnki
(Impulsmomentensatz)
ν
Sonderfall: Koordinatensystem x1 , x2 , x3 nur teilweise körperfest
−
→
ω = ωj ~ej
(Rotation des Körpers
−
→
ω⊕ = ωk⊕ ~ek
(wie bisher))
(Rotation des Koordinatensystems
X−
→
→
−
→
d⋆ −
→
L 0/S + −
Mν [ 0/S ] =
ω⊕ × L 0/S
dt
ν
X
Mν,i = Jij ω̇j + Jkℓ ωℓ ωk⊕ εnki
(neu!))
(Impulsmomentensatz bei
teilweise körperfestem
Koordinatensystem)
ν
Mehrachsige Rotation um Hauptträgheitsachsen
Da der Trägheitstensor reell besetzt und symmetrisch ist, hat dieser die gleichen
mathematischen Eigenschaften wie der Spannungstensor. Es existiert daher stets
ein (orthogonales) Hauptachsensystem mit
−
→(2)
J = J1 ~e1+~e1+ + J2 ~e2+~e2+ + J3 ~e3+~e3+
J1
= 0
0
J+
0
J2
0
0
0 .
J3
(Trägheitsmatrix bei Rotation
um Hauptträgheitsachsen)
Dynamisches Auswuchten bedeutet, eine durch Lagerung erzwungene Drehachse gewissermaßen nachträglich“ durch geeignete Massenmanipulation zu ei”
ner durch den Schwerpunkt verlaufenden Hauptträgheitsachse zu machen. Dieses
schließt statisches Auswuchten mit ein!
X
Mν,1 = J1 ω̇1 − (J2 − J3 ) ω2 ω3
ν
X
Mν,2 = J2 ω̇2 − (J3 − J1 ) ω1 ω3
ν
X
ν
Mν,3 = J3 ω̇3 − (J1 − J2 ) ω1 ω2
(Eulersche Gleichungen)
(V 2.1)
Technische Mechanik
Prof. Dr.-Ing. F. Mestemacher
23
Arbeit und Leistung (Translation)
dW
−
→ −
F · d→
r
:=
−
→
→
= k F k kd−
r k cos α
=
−
→ →
mit α = ∢ F, d−
r
F cos α | ds |
W1→2 =
Z
~r2
Z
t2
Z
s2
−
→ −
F · d→
r
(Arbeit)
~r1
W1→2
=
t1
W1→2
=
s1
dW
dt
P :=
−
→
d~r
dt
F (t) ·
dt
=
−
→
d~r
ds
F (s) ·
ds
=
Z
Z
t2
−
→ −
F ·→
v dt
t1
s2
s1
−
→
F · ~et ds
(Kurvenparametrisierung)
−
→ →
−
→ d~r
= F ·−
v
= F·
dt
W1→2
=
Z
(Leistung)
t2
P (t) dt
t1
Z
~r2
~r1
X−
→
→
Fi · d−
r = E2kin − E1kin
(Arbeitssatz)
i
| {z }
alle Kräfte!
Z
~r2
~r1
X−
→
→
r = E2kin − E1kin + E2pot − E1pot
Fi · d−
(Arbeitssatz)
i
| {z }
ohne Schwerkraft!
E kin :=
m 2
v
2
E pot := m g z + E0pot
(kinetische Energie)
mit
E0pot = E pot (z = 0)
(potentielle Energie)
Hier ist z die der Schwerkraft entgegengerichtete Vertikalkoordinate!
24
Technische Mechanik
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
Arbeit und Leistung (Einachsige Rotation)
dW := M dϕ
Z
W1→2 =
ϕ2
M dϕ
(Arbeit)
ϕ1
Z
W1→2 =
t2
t1
dW
dt
P :=
Z
dϕ
dt =
M (t)
dt
=
M ω dt
(Parametrisierung)
t1
dϕ
= M ω
dt
= M
W1→2
t2
Z
(Leistung)
t2
P (t) dt
t1
Z
ϕ2
X
ϕ1
Mi [D] dϕ = E2kin rot − E1kin rot
(Arbeitssatz)
i
E kin rot :=
JD 2
ω
2
(kinetische Energie der
einachsigen Rotation)
Stoßvorgänge
t = 0
(Zeitpunkt unmittelbar vor dem Stoß)
t = τ
(Zeitpunkt unmittelbar nach dem Stoß)
lim
τ →0
Z
−
→
S :=
τ
−
→
F (t) dt
0
Z
τ
Z
τ
und
lim
τ →0
Z
τ
−
→
M(t) dt
sind endlich
(Stoßannahme)
0
−
→
F (t) dt
(Stoßantrieb)
−
→
M(t) dt
(Drehantrieb)
0
−
→
R :=
0
Technische Mechanik
X−
→
Si
i
=
(V 2.1)
Prof. Dr.-Ing. F. Mestemacher
−
→
−
→
I (τ ) − I (0)
(Impulssatz in Integralform)
→
→
= m −
v S (τ ) − −
v S (0)
X−
→
−
→
−
→
Ri [ 0/S ] = L 0/S (τ ) − L 0/S (0)
25
(Impulsmomentensatz in Integralform)
i
X
i
Ri [ 0/S ] = J0/S ω(τ ) − ω(0)
−
→
−
→
S K , SR
(Stoßantrieb in der Kompressions-/Restitutionsphase)
−
→
SR
k SR k
v2n (τ ) − v1n (τ )
=
ε := −
= −
→
S
v2n (0) − v1n (0)
K
k SKk
ε
(dto., ebene Bewegung)
(vollkommen unelastisch)
= 0
∈ ] 0, 1 [ (teilweise elastisch)
= 1
(vollkommen elastisch)
E1 (τ ) + E2 (τ ) = E1 (0) + E2 (0)
−
→
→
v 1 (τ ) = −
v 2 (τ ) ,
ω1 (τ ) = ω2 (τ )
Version: 2.1
(02/2008)
∈ [0, 1]
(Stoßziffer)
(Erhaltung der kinetischen Energie
beim vollkommen elastischen Stoß)
( Kleben“ beim vollkom”
men unelastischen Stoß)
Hauptsätze der Körperdynamik
Bewegung
Ursache
Translation
result. Kraft
X−
→
Fν
Trägheit
m
Bewegungsgröße
Satz
Impuls
−
→
→
I = m−
v
Impulssatz
−
→
X−
→
dI
Fν =
dt
ν
Impulsmoment
Impulsmomentensatz
ν
result. Moment
Spezialfälle
m ≡ const
Schwerpunktsatz
→
X−
→
d−
v
Fν = m
dt
ν
Impulsmomentensatz
einachsige
Rotation
um
Hauptträgheitsachse D
X
Mν [D]
JD
ν
mehrachsige
um 0/S
X−
→
Mν [0/S]
X
ν
result. Moment
Rotation
LD = JD ω
Impulsmoment
−
→(2)
J
−
→
−
→(2) −
L0/S = J0/S
·→
ω
ν
0/S bedeutet raumfester Lagerpunkt 0 oder Schwerpunkt S“
”
Mν [D] =
dLD
dt
Impulsmomentensatz
−
→
X−
dL0/S
→
Mν [0/S] =
dt
ν
JD ≡ const
X
Mν [D] = JD
ν
dω
dt
Indexschreibweise für 0/S
X
ν
Mν,i = Jij ω̇j + Jkℓ ωℓ ωk εnki