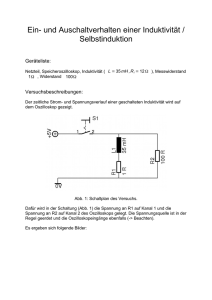
Entwicklung und Aufbau einer Meßeinrichtung für RFID
Werbung

Seite 1 von 58 Diplomarbeit von Yilmaz Akyol Diplomarbeit Entwicklung und Aufbau einer Meßeinrichtung für RFID Komponenten von Yilmaz Akyol Matrikelnummer s720774 Beuth-Hochschule für Technik Berlin Fachbereich VI Technische Informatik Luxemburgerstr.10 13353 Berlin Seite 2 von 58 Diplomarbeit von Yilmaz Akyol 1 Einleitung Die Anzahl automatisierter Erkennungs- und Überwachungsaufgaben nimmt ständig zu. Berührungslose optische Systeme sind seit Jahren erfolgreich im Einsatz ( „barcode- Leser“ ); diese dienen jedoch überwiegend der Unterstützung des Bedienpersonals. Systeme, deren Nutzung unabhängig ist von menschlicher Bedienung, dienen der Einsparung von Arbeitskräften. Dieses erfolgt durch die Verwendung von automatisch und berührungslos, gleichzeitig einfach, sicher und kosteneffizient arbeitenden hochfrequenten Indentifikationseinrichtungen. 2 2.1 Grundlagen Kurzdarstellung zur RFID Radio Frequency Identification, im Englischen „Radio Frequency Identification“ also die drahtlose ( „Funk“ ) Übertragung von Informationen zur Identifikation/ Legitimation, ermöglicht die berührungslose Datenerfassung und öffnet dank immer einfacherer und kostengünstiger werdender Technologien ständig neue Einsatzbereiche. Die Darstellung der Grundlagen gibt einen Einblick in RFID Systeme und den Einfluss auf ihre Umgebung. Anliegen dieses Kapitels ist die Vermittlung der Grundlagen der RFID Systeme, RFID Lösungen und Einsatz in unterschiedliochen Frequenzbereichen. Aktive und passive Systeme sind gleichermaßen vertreten. Passive Systeme: der Sender sendet periodisch Energie aus; wird ein passiver Sensor angenähert, lädt sich dessen Energiespeicher ( Kondensator ) auf, das System sendet dann seine Kennung aus. Aktive Systeme: der Empfänger ist mit einer eigenen Energiequelle versehen und reagiert nur auf die empfangene hochfrequente Information Seite 3 von 58 Diplomarbeit von Yilmaz Akyol Ein RFID System besteht immer aus einem Datenträger (jeweils ein Chip und eine Antenne in einem Träger (RFID-Transponder oder Tag) und einem Lesegerät (bestehend aus einer Antenne und einem Decoder). Zur Datenübertragung werden magnetische oder elektromagnetische Felder eingesetzt. 2.2 RFID Lösungen - Aktive Transponder / Passive Transponder 2.2.1 Aktiv: Zur Überbrückung grosser Lesedistanzen (mehrere Meter) haben die RFIDTransponder eine Stromversorgung (Batterie). ( Einsatzbereich: z.B. Zufahrtskontrollen auf Werksgeländen: Mautzahlungen ). 2.2.2 Passiv: Die RFID-Transponder haben keine eigene Stromversorgung. Die Energie wird vom Lesegerät erzeugt (Leseabstände bis ca. 60cm). 2.3 Die Frequenzbereiche folgenden Tabellen zeigen die Charakteristika der verschiedenen Frequenzbänder auf: 100-135 KHz ( Bereich von 30 bis 500 kHz ) 125 kHz ist die meistverbreitete Frequenz für preisgünstige, passive RFIDTranspondersysteme Vorteile Nachteile Verwendung von günstigen passiven Große Transpondern Transponder-Bauformen Antennenwindungszahl) (hohe Seite 4 von 58 Diplomarbeit von Yilmaz Akyol Gute Durchdringung von nicht- Geringe Datenkapazität metallischen Gegenständen, Wasser und Geringe Übertragungsgeschwindigkeit organischem Gewebe Standardisierung durch ISO 11784/85 Relativ unempfindlich gegen metallische Umgebungseinflüsse Frequenzband weltweit verfügbar Hohe erlaubte Sendeleistung 13,56 MHz ( 10 - 15 MHz ) Diese Frequenz wird hauptsächlich von RFID-Transponder Etiketten verwendet Vorteile Nachteile Verwendung von günstigen passiven Hohe Dämpfung durch Transpondern Umgebung Standardisierung durch ISO 15693, Lesereichweite Teil 1-3 Bestimmungen beschränkt Höhere Datenkapazität Große Mittlere Antennenbauformen durch Reichweiten metallische gesetzliche erfordern große Datenübertragungsgeschwindigkeit (Frequenzband weltweit verfügbar 26 kBit/s) 869, 915 MHz Vorteile Nachteile Große Reichweite Schlechte Durchdringung von Wasser Einfaches Antennendesign und organischem Gewebe Kostengünstig Seite 5 von 58 Diplomarbeit von Yilmaz Akyol Standardisierung (EPC 2,45 GHz Häufig für LongRange Systeme verwendete Frequenz. Neuerdings auch 5,8 GHz Vorteile Nachteile Hohe Große Bauform Datenübertragungsgeschwindigkeiten Preis Hohe Reichweiten Lebensdauer Versorgung mit Energie Keine Standardisierung *Quelle http://www.rfid-ready.de/rfid-frequenzen.html Tabelle 1 Die Die Vorteile und Nachteil von unterschiedliche RFID Frequenzen Nutzung einzelner Frequenzbereiche unterliegt häufig der nationalen Gesetzgebung, so dass gern auf für die Allgemeinheit freigegebene Bereiche zurückgegriffen wird ( „ISM“- Bänder, also Nutzung für „industrial“, „scientific“, „medical“ Anwendungen )( 13,56 NHz, 433 MHz, 2,4 GHz; zusätzlich Frequenzen für „short range devices“ im Bereich um 868 MHz. Grundsätzlich müssen natürlich auch die Anforderungen der EMV- Normen eingehalten werden bzw. 3 3.1 Aufgabenstellung Beschreibung der Aufgabenstellung Seite 6 von 58 Diplomarbeit von Yilmaz Akyol Im Rahmen der vorliegenden Arbeit wird ein Feldstärkemessgerät für den niederfrequenten Übertragungsbereich entwickelt und realisiert. 3.2 Parameter Für einen praxisnahen Betrieb wurde folgende Ausführung in Erwägung gezogen: Handgerät Batteriebetrieb Messbereich etwa 100 bis 400 KHz Linearisierte, frequenzunabhängige Feldstärkeanzeige ( A/m ) 3 ½ stellige Digitalanzeige, bedarfsweise mit zwei Empfindlichkeitsbereichen Hohe Genauigkeit 3.3 Ermittlung der Messbereiche Da keine Informationen über die erzeugten und üblicherweise verwendeten Feldstärken verfügbar waren, wurde unter Verwendung einer kommerziellen Sendeantenne für 125 kHz bei Erregung der Antenne mit unterschiedlichen Strömen eine graphische Darstellung des Feldstärkeverlaufs durchgeführt Nachdem sich zeigte, nach welchem Muster diese Linien verlaufen, wurde die Feldstärke über der Entfernung in Abhängigkeit vom injizierten Strom in axialer Ausbreitungsrichtung gemessen. Das erfolgte unter Verwendung einer Messspule nach MilStd 462 E mit Kalibrierdiagramm; die Kalibrierung dieser Spule wurde in einem Helmholtzsystem überprüft und bestätigt ( in diesem System kann ein Feld generiert werden, das über die mechanischen Abmessungen und den injizierten Strom berechnet werden kann, zusätzlich Überprüfung der Berechnung mit einem Teslameter der Fa. ProjektElektronik, Berlin. 3.4 Definition des Prozesses Seite 7 von 58 Diplomarbeit von Yilmaz Akyol In einem Helmholzsystems wird als Referenz ein Feld bei 100 kHz mit einer Feldstärke 1A/m erzeugt, die Messsonde in das Feld verbracht und die Ausgangsspannung hochohmig ( mittels eines Oszilloskops ) gemessen und mit der im Diagramm angegebenen Spannung verglichen ( kalibriert ) Feld Spannung Erzeugung eines magnetischen Feldes definierten ,dadurch entstehende Spannung wird gemessen. Abb. 1 Feldstärke effekt Mit der kalibrierten Messsonde werden die Feldlinien der Spulen ermittelt und dargestellt. (Abb. 1) 3.4.1 Helmholzspule Unter einer Helmholtzsystem versteht man ein Paar identisch dünner, parallel angeordneter Spulen, deren Abstand zueinander ihrem Radius entspricht. Mit Hilfe einer Helmholtzsystem lässt sich ein möglichst homogenes Magnetfeld erzeugen. Seite 8 von 58 Diplomarbeit von Yilmaz Akyol Abb. 2 Helmholtz Spule Abbildung 3 zeigt die magnetische Flussdichte zwischen den Windungen. Man kann sehen, dass die Flussdichte einheitlich zwischen den Windungen mit Ausnahme des Randbereichs der Spule verläuft. Abb. 3 Die Oberfläche Farbe-Plot zeigt die magnetische Flussmittel Dichte. Die Pfeile zeigen an, die magnetische Feldstärke (H) und die Richtung Seite 9 von 58 Diplomarbeit von Yilmaz Akyol Die wichtigste Eigenschaft der Helmholtz-Spule ist, dass der magnetischer Fluss in einem großen Kugelvolumen mit einem einfachen Spulensystem homogen und berechenbar wird. Dies ist in Abbildung 4 (a) zu sehen, die ein radiales FlussdichteProfil für eine axiale Position zwischen den Wicklungen zeigt. In Abbildung 4 (b) wird ein axiales magnetisches Flussdichte-Profil dargestellt. Das Modell macht deutlich, dass das in einer Helmholtz-Spule erhaltene Magnetfeld homogen ist. Abb. 4 Der magnetische Fluss Dichte Profil. (A) die Parzellen zeigen das Profil entlang einer radial größten Durchmesser Linie durch das Recht Achse zwischen den Windungen und ein Profil genommen entlang der Achse (b) getroffen. Ein hohes Maß an Einheitlichkeit ist deutlich gezeigt 3.4.2 Kalibrierung Als Kalibrierung wird der Vergleich der mit einem Messgerät ermittelten Werte mit denen einer Referenz oder eines Normals bezeichnet. Dabei wird ermittelt, wie groß die Abweichung zwischen beiden Werten ist oder ob diese Abweichung innerhalb bestimmter Schranken liegt. Die gesetzlich vorgeschriebene Kalibrierung eines Messgerätes ist eine Eichung. ( Unterschied: ein Mitarbeiter des Eichamtes führt eine Eichung durch, der gleiche Vorgang durch einen normalen Menschen ausgeführt heißt hingegen Kalibrierung ). Somit ermitteln wir den Zusammenhang zwischen Messwert oder Erwartungswert der Ausgangsgröße und dem zugehörigen wahren oder richtigen Wert der als Seite 10 von 58 Diplomarbeit von Yilmaz Akyol Eingangsgröße vorliegenden Messgröße für eine betrachtete Mess-Einrichtung bei vorgegebenen Bedingungen. Bei der Kalibrierung erfolgt kein Eingriff, der das Messgerät verändert. Zu einer Kalibrierung gehört die Definition des Messprozesses (Umgebungsbedingungen, erforderliche Normale, Vorgehensweise) Erstellung eines mathematischen Modells zur Auswertung der Kalibrierung unter Berücksichtigung aller bekannten systematischen Einflüsse eine Unsicherheitsanalyse mit Hilfe des mathematischen Modells Angabe eines vollständigen Ergebnisses, d. h. Kalibrierwert und Kalibrierunsicherheit. 3.4.3 Schwingkreiskompensation in elektrischer Schwingkreis ist eine resonanzfähige elektrische Schaltung aus einer Spule (L) und einem Kondensator (C), die elektrische Schwingungen ausführen kann. Bei diesem LC-Schwingkreis wird Energie zwischen dem magnetischen Feld der Spule und dem elektrischen Feld des Kondensators periodisch ausgetauscht, wodurch abwechselnd hoher Strom oder hohe Spannung vorliegen. Die Frequenz f0, mit der sich dieses im ungestörten Fall periodisch wiederholt, ist: Abb. 5 Schwingkreis allgemein ( Darstellung mit Schaltzeichen gemäß EN 60617-4:1996) (1) wobei L die Induktivität der Spule und C die Kapazität des Kondensators sind. Die Gleichung nennt man Thomsonsche Schwingungsgleichung. Seite 11 von 58 Diplomarbeit von Yilmaz Akyol Die Resonanzfrequenz der vorliegenden, industriell gefertigten und in einem Transpondersystem genutzten Spule wurde für 125 KHz festgelegt. Im Resonanzfall sind der induktive und der kapazitive Blindwiderstand gleich groß; dabei können ( in Abb.6 bildhaft dargestellt ) „große“ Induktivitäten mit „kleinen“ Kapazität oder umgekehrt kombiniert werden. Der Einfluß auf das weitere Schwingkreisverhalten bleibt hier unberücksichtigt. (2) (3) bei Resonansfall , für die Frequenz 125 KHz lässt sich Kondensator wie unten berechnen, (4) Der verwendete Kondensator mit …..bF weist einen Wert der Normreihe auf, so dass davon auszugehen ist, dass die Spule dazu berechnet wurde. Einige selbst gewickelte Spulen, die mit Kondensatoren von 14 und 2,4 nF…. auf Resonanz gezogen wurden, zeigten bei der Feldstärkemessung niedrigere Beträge; von einer Optimierung des vorliegenden Schwingkreises kann daher ausgegangen werden. Seite 12 von 58 Diplomarbeit von Yilmaz Akyol Abb. 6 : Schwingkresikompenstion Seite 13 von 58 Diplomarbeit von Yilmaz Akyol 4 Einführung 4.1 Überprüfung der Messsonden für die Voruntersuchung Zwei Messsonden nach MilStd 462 stehen zur Verfügung ( Sonde 1, Frequenzbereich von 30 Hz bis 100 KHz und Sonde 2, Frequenzbereich von 10 KHz bis 1 MHz ). Für diese Sonden stehen Kalibrierdiagramme zur Verfügung, deren Genauigkeit überprüft wurde. Tabelle 2 Die Leerlaufspannung der Spulen in Abhängigkeit von der Frequenz bei einer magnetischen Feldstärke von 100 dB µA /m Bei einer applizierten Feldstärke bei 100 dB µA /m bei f= 125 kHz generiert Sonde 1 eine Leerlaufspannung von etwa 73 dBµV…., Sonde 2 hingegen 53 dBµV . Diese Beträge sind nicht hoch präzise, und dienen vielmehr der Orientierungsmessung. Seite 14 von 58 Diplomarbeit von Yilmaz Akyol . (5) = 0,1 A/m H /A/m Leerlaufspannung an Sonde 1 /mV Leerlaufspannung an Sonde 2 /mV 0,1 4,47 0,447 1 44,7 4,47 10 447 44,7 100 4470 447,0 Tabelle 3 : Kalibrierung der Sonden Zur Überprüfung wurden die Spulen in einem vorhandenen Helmholtzsystem auf Erzeugung der angegebenen Leerlaufspannung überprüft ( Helmholtzsystem mit r = 0, 3 m und je 10 Windungen; die zuvor ermittelte Resonanzfrequenz der Spulen liegt , bedingt durch die Wickeltechnik, oberhalb 4 MHz ). Abb. 7 Helmholtzsystem R=30 cm , I=10 mA , N=10 Seite 15 von 58 Diplomarbeit von Yilmaz Akyol 4.2 Ermittlung des Wandelmaßes der Meßsonden Aus den mechanischen Abmessungen der Spule und dem injizierten Strom kann die Feldstärke bzw der für eine gewünschte Feldstärke notwendige Strom berechnet werden . H= 1 A/m N=10 , r=0,3, i=? Aus der Formel (6) nachrechnen!!! Für 1 A/m Das Helmholtzsystem wurde bei einer Spannung bei einer Frequenz von 125 KHz gespeist. Die Stromstärke wurde in einer Leitung der H-Spule mittels Stromzange gemessen und über Spannungsvariation eingestellt, Somit wurde ein homogenes Feld mit einer Feldstärke von 1 A/m erzeugt. Die Feldstärke wurde zusätzlich zur Berechnung vorsorglich mit einer Messsonde der Fa. Projekt- Elektronik überprüft. Beide Sonden wurden diesem Feld ausgesetzt, die Leerlaufspannung oszilloskopisch gemessen. Die in Tabelle 3 berechneten Leerlaufspannungen für beide Spulen wurden etwa bestätigt 4.3 Durchführung der Messung mit der kalibrierten Messsonde 4.3.1 Aufnahme des Feldlinienverlaufs Die vorgegebene 125 kHz- Antenne wurde zentral auf Millimeterpapier positioniert. Die Stelle der Spule wurde mit Punkten gekennzeichnet, Der in die Spule injizierte Strom wurde zunächst auf 10 mA eingemessen, mit der Messsonde 1 dann Orte gleicher Feldstärke ermittelt und auf dem Millimeterpapier vermerkt. Dazu wurde die Sonde in der Umgebung der Antenne bzgl Entfernung und Seite 16 von 58 Diplomarbeit von Yilmaz Akyol Drehwinkel solange verschoben, bis jeweils die gleiche Spannung am Oszilloskop gemessen wurde Die auf die Antenne weisenden Linien repräsentieren den Verlauf der Feldlinien, die rechtwinklig dazu gezeichneten Linien die Orte gleicher Feldstärke. (Abb. 8) Abb. 8 :Richtdiagramm der vorgegebenen Antenne Bei den vorbereitenden Messungen wurde ein Strom von 10 mA bei einer angelegten Spannung von 365 mV erzielt. Verdopplung der Spannung führt somit zu einer Verdopplung der Stromstärke usw. Bei dieser Meßreihe wurde in 1 cm- Abständen ( von der Kante des Ferrites ausgehend ) in axialer Richtung die Feldstärke bei unterschiedlicher Stromstärke gemessen. Siehe Tabellen unten Seite 17 von 58 Diplomarbeit von Yilmaz Akyol Generator 365 mV 730 mV 1,095 V 1,46 V 1,82 V 2,19 V 2,555 V 2,92 V l/cm i=10 mA i=20 mA i=30 mA i=40 mA i=50 mA i=60 mA i=70 mA i=80 mA 1 2,6 5,4 8 10,5 13,2 15,6 19 21 2 1,2 2,4 3,7 4,8 6 7,2 8,6 9,6 3 0,68 1,32 2,1 2,7 3,4 4,2 4,8 5,4 4 0,42 0,84 1,5 1,7 2,1 2,5 3 3,3 5 0,28 0,56 0,84 1,06 1,4 1,7 1,9 2,2 6 0,19 0,4 0,59 0,8 0,96 1,16 1,36 1,6 7 0,15 0,28 0,44 0,57 0,72 0,88 1,04 1,15 8 0,108 0,22 0,37 0,43 0,54 0,65 0,76 0,88 9 0,087 0,17 0,25 0,28 0,42 0,5 0,59 0,66 10 0,07 0,13 0,2 0,26 0,33 0,4 0,47 0,54 l/cm i=10 mA i=20 mA i=30 mA i=40 mA i=50 mA i=60 mA i=70 mA i=80 mA 1 0,91 1,90 2,82 3,71 4,66 5,51 6,71 7,42 2 0,42 0,95 1,30 1,69 2,12 2,54 3,04 3,39 3 0,24 0,46 0,74 0,95 1,20 1,48 1,69 1,90 4 0,14 0,29 0,53 0,60 0,74 0,88 1,06 1,16 5 0,098 0,19 0,29 0,37 0,49 0,60 0,67 0,77 6 0,067 0,14 0,20 0,28 0,33 0,41 0,48 0,56 7 0,053 0,098 0,15 0,20 0,25 0,31 0,36 0,40 8 0,038 0,077 0,13 0,15 0,19 0,22 0,26 0,31 9 0,030 0,060 0,088 0,098 0,14 0,17 0,20 0,23 10 0,024 0,045 0,070 0,091 0,11 0,14 0,16 0,19 l/cm i=10 mA i=20 mA i=30 mA i=40 mA i=50 mA i=60 mA i=70 mA i=80 mA 1 20,4 42,4 62,8 82,5 103,7 122,5 149,2 164,9 2 9,4 21,2 29 37,7 47,14 56,5 67,5 75,4 3 5,3 10,3 16,5 21,2 26,7 33 37,7 42,4 4 3,2 6,6 11,7 13,3 16,5 19,6 23,5 25,9 5 2,2 4,4 6,6 8,3 11 13,3 14,9 17,2 6 1,51 3,14 4,6 6,2 7,5 9,1 10,6 12,5 7 1,17 2,2 3,46 4,4 5,6 6,9 8,1 9,0 8 0,84 1,7 2,9 3,3 4,2 5,1 5,9 6,9 9 0,68 1,3 1,9 2,2 3,3 3,9 4,6 5,1 10 0,54 1,02 1,57 2,04 2,6 3,1 3,6 4,2 Spannung Upp U eff A/m Tabelle 4 Aufnahme der vorgegeben Spule in Upp, Ueff und A/m Seite 18 von 58 Diplomarbeit von Yilmaz Akyol 4.3.1.1 Zwischenergebnis Gemessen wurde bis 80 mA, in Verbindung mit batteriebetriebenen Geräten erscheint ein extrapolierter Meßwert von etwa 200 A/m bei 1 cm Messabstand als Maximalwert realistisch. 4.3.2 Optimierung verschiedener Spulen Auf dem vorgegebenen Ferrit wurden nacheinander drei Spulen L1, L2 und L3 gewickelt.(Abb.9) Abb. 9 : Spulen mit unterschiedlichen Windungszahlen L1 L2 L3 Windungszahl 40 100 200 Induktivität ohne Ferrit/ µH 6,7 38 102 Induktivität mit Ferrit/ µH 115 650 1740 Kapazität für 125 kHz/ nF 14 2,48 0,94 Nach Formel (4) Seite 19 von 58 Diplomarbeit von Yilmaz Akyol wurde die Kapazität und L3. Diese C= 14 nF gewählt sowie entsprechende Kapazitäten für L2 Kapazitätswerte werden aus mehreren Kondensatoren zusammengestellt, wobei die tatsächlich Resonanzerzeugenden Werte kleiner sind als die berechneten ( Windungskapazitäten ). Mit Hilfe des Generators wurde in die jeweilige Spule 30 mA Strom injiziert und in 1 cm Abständen bis 10 cm die Leerlaufspannung der Sonde 1 oszilloskopisch ermittelt und daraus die Feldstärke bestimmt. L1 ( 40 Wdg ) Upp U eff H (A/m) l/cm bei i= 30 mA bei i= 30 mA bei i= 30 mA 1 2,7 0,95 21,2 2 1,32 0,46 10,3 3 0,73 0,25 5,74 4 0,46 0,16 3,65 5 0,3 0,10 2,33 6 0,2 0,07 1,57 7 0,16 0,056 1,25 8 0,116 0,041 0,91 9 0,09 0,031 0,70 10 0,07 0,024 0,54 Tabelle 5 : Aufnahme der Spule mit 115 µH in Upp, Ueff und A/m L2 ( 100 Wdg ) Upp U eff H (A/m) Bei i=30mA Bei i=30mA bei i=30 mA 1 2,16 0,76 16,97 2 1,056 0,37 8,29 3 0,584 0,20 4,58 l/cm Seite 20 von 58 Diplomarbeit von Yilmaz Akyol 4 0,368 0,13 2,89 5 0,24 0,084 1,88 6 0,16 0,056 1,25 7 0,128 0,045 1,00 8 0,0928 0,032 0,72 9 0,072 0,025 0,56 10 0,056 0,019 0,43 Tabelle 6 : Aufnahme der Spule mit 605µH in Upp, Ueff und A/m Die Spule L3 wurde mit 200 Windungen gewickelt. Ihre Induktivität wurde 1,74 mH gemessen. Dieser Wert ist so hoch, dass die gewünschte Stromstärke von 30 mA aufgrund der verfügbaren Generatorspannung nicht eingestellt werden konnte. Daraus folgt , dass keine weiteren Untersuchungen angestellt werden konnten. Ergebnis: Beide Spulen erzeugen bei gleichgroßem injizierten Strom ( 30 mA ) eine geringere Feldstärke als die industriell gefertigte. Ergebnis: geringerer Wirkungsgrad. Die industriell gefertigte Antenne ist offensichtlich optimiert und dient als Referenz für weitere Messungen. : 5 5.1 Entwicklung des Feldstärkenmessgerätes Meßverfahren Noch formatieren! Formeln! Die Verwendung einer Spule als Feldwandler kann auf zwei Arten erfolgen Über die Messung der Leerlaufspannung einer Spule U leerlauf ist proportional abhängig von H, f, A, n; H= magnetische Feldstärke F= Frequenz A= Fläche der Spule n= Windungszahl Seite 21 von 58 Diplomarbeit von Yilmaz Akyol A und n sind konstant, als Variable treten H und f auf. Oder Über den Kurzschlussstrom in einer Spule. I kurzschluß ist proportional abhängig von H, , A, n ( unter der Voraussetzung, dass die Gesamtleitungslänge << lambda ist ) Gewählt wird die Messung der Leerlaufspannung: U leerlauf ist proportional abhängig von H, f, A, n; Dabei soll H gemessen werden, f ist unbekannt, A und n sind konstante, festgelegte Spulengrößen. In einer anderen Anwendung konnte ein einfaches Messgerät bei einer konstanten Frequenz realisiert werden. Hier wird eine Frequenzgangkompensation notwendig. 5.1.1 Vorgehen hier Ermittlung einer Messspule, die im gewünschten Frequenzbereich unterhalb der Eigenresonanzfrequenz misst; diese Spule wird ab schließend den Charakteristika der anderen Baugruppen angepasst. Entwicklung eines Verstärkers, dessen Frequenzgang den Anstieg der Leerlaufspannung bei zunehmender Frequenz kompensiert ( Integratorschaltung ). Verwendung eines Präzisionsgleichrichters ( im genutzten Frequenzbereich mit Standard-OPs möglich ). Möglicherweise umschaltbare Empfindlichkeit. Anzeige über ein sog. Panelmeter mit entsprechender Beschaltung. 5.2 Vorüberlegungen und Anforderungen In diesem Kapitel werden grundlegend das Konzept und der Aufbau des Messgerätes behandelt. Dazu ist es notwendig, zunächst durch Vorüberlegungen, unter Berücksichtigung der Messfehlerproblematik, eine geeignete Messmethode zu wählen. Anschließend wird das Schaltungskonzept entworfen und schematisch Seite 22 von 58 Diplomarbeit von Yilmaz Akyol dargestellt. Ein Messgerät wird aufgebaut, die einzelnen Baugruppen überprüft und eingemessen und assembliert Das Messgerät besteht aus vier Funktionseinheiten und den Schnittstellen zwischen den Einheiten (Abb. 10 ). Abb. 10 : Schematische Darstellung einer allgemeinen Messkette Eine Messspule (Sensor) soll die aufgenommen Wechselfelder mit Hilfe eines frequenzabhängigen Verstärkers verstärken und an einen Gleichrichter übergeben, der wiederum die gleichgerichtete Größe an einem Handgerät anzeigen soll (Messwertausgabe). Die dem zu mewssenden Feld entnommene Energiemenge wird als so gering eingescvhätzt, dass durch die Einwirkung des Messgerätes keine nennenswerten Fehler entstehen. 5.3 Schematischer Aufbau einer Messeinrichtung Das Messgerät wird in drei Funktionseinheiten unterteilt (Abb. 10). In der ersten Einheit ( Sensor , Messaufnehmer) wird die zu erfassende Messgröße ( hier: Seite 23 von 58 Diplomarbeit von Yilmaz Akyol hochfrequent3es H- Feld ) in ein elektrisches Signal umgeformt ( Leerlaufspannung der Spule ).). Abb prüfen! Abb. 11 Sensor als erstes Glied einer Messkette Der hier verwendete Sensor basiert auf dem physikalischen Effekt der Induktion; die Ausgangsgröße ist somit eine Funktion der Messgröße. Ein passiver Sensor erzeugt ein Spannungssignal ohne externe Energiequelle. Die hier generierte, weitrzuverarbeitende Größe ist abhängig von zwei Variablen, nämlich der eigentlich zu messenden H- Feldstärke und der Frequenz des Signals. Mit zunehmender Frequenz steigt – bei konstanter Feldstärke – die Leerlaufspannung linear an. Um trotzdem eine frequenzunabhängige Ausgangsgröße zu erhalten, wird ein Verstärker mit Frequenzgangkompensation eingesetzt. Für die Anzeige der gemessenen Größe folgt eine weitere Funktionseinheit, (z.B. digitale Anzeige) , die gleichzeitig auch die Versorgungseinheit ( Batterie ) enthält.. einzelnen Komponenten dargestellt. Seite 24 von 58 Diplomarbeit von Yilmaz Akyol Abb. 12 Schematischer Aufbau des Messgerätes Bei der Festlegung einer geeigneten mechanischen Schnittstelle zwischen den Einheiten wurde nach Verfügbarkeit entschieden.( Signalzuführungen über 9-polige SUB- D- Buchsenleisten. Wichtig erschien eine weitgehendfe Trennung zwischen dem eigentlichen Seisor, der dem Messfeld ausgesetzt wird, einer ausreichenden mechanischen Entkopplung zur Verstärker- Gleichrichtereinheit ( Spule an 20 cm langem Rohr befestigt ) sowie einer Trennung zum abgesetzten Hauptgerät mit der Anzeigeeinheit. Somit kann mit der Sonde beliebig manipuliert, gleichzeitig aber der Messwert ungestört abgelesen werden. 5.4 Messprinzip DOPPELT wohin genau? Seite 25 von 58 Diplomarbeit von Yilmaz Akyol Nach den bisher erwähnten Anforderungen ergeben sich zwei mögliche Varianten, die als Nächstes erläutert werden. Erstens: Messung der Leerlaufspannung einer offenen Luftspule Messprinzip : U0 ~ A U0 ~ ƒ U0 ~ Η (7) Zweitens: Messung des Kurzschlussstromes einergeschlossenen Luftspule Messprinzip : I0 ~ A I0 ~ Η (Umfang << λ (8) ) Der Entscheidungsgrund für das erste Messprinzip ( Unull ) liegt darin, dass für die Messung des Kurzschlussstromes ein extrem niederohmiger, HF- tauglicher Messwandler benötigt wird. Die kurzgeschlossene Variante wäre bevorzugt geeignet für Messgeräte, die für ein breites Frequenzspektrum vorgesehen sind. Die Aufnahme der magnetischen Komponente des Feldes erfolgt durch eine Spule, die als Sensor dient. Hierbei wird die Proportionalität der Leerlaufspannung zu Fläche, Frequenz und Feldstärke genutzt. Dort werden die Feldkomponenten in eine Wechselspannung umgewandelt. Für die vorgesehen Bandbreite von etwa 50 bis etwa 500 kHz soll ein Integrator frequenzabhängig die Verstärkung kompensieren, so dass er anschließend am Ausgang immer eine konstante Größe für die jeweilige gemessene Feldstärke ausgibt. Ein Präzisionsgleichrichter erzeugt dann eine dem Feld proportionale Gleichspannung. Danach ist die Rahmengröße der Feldsonden für die zu messende Feldstärkengrößenordnung zu bemessen. Eine präzise Messung wird dadurch ermöglicht, dass die Sonde sowohl vom Wandler als auch vom Messgerät abgesetzt angeordnet ist. Seite 26 von 58 Diplomarbeit von Yilmaz Akyol Die Sonde ist steckbar und der Sondenkopf etwa 20 cm vom Wandler und bzw. 80cm mittels eines Kabels vom Messgerät abgesetzt. Abb. 13 5.5 ESB des Messempfängers Schaltungskonzept und Realisierung der einzelnen Funktionseinheiten In den nächsten Abschnitten wird die schaltungstechnische Realisierung der Funktionseinheiten beschrieben. Bauelemente werden funktionskorrekt mit möglichst kurzen Leitungen verbunden. Als Trägermaterial dient eine Lochrasterplatte mit einem Punktraster von 2,54mm. Vor der endgültign Montage wurden die zunächst getrennt realisierten Schaluntgsteile überprüft ( Integratorverstärker, Präzisionsgleichrichter ).. Erst nach einer erfolgreichen Überprüfung konnte anschließend der Aufbau mit den vorgesehenen Bauelementen umgesetzt werden. 5.5.1 Integrator Der invertierende Verstärker eignet sich hervorragend als aktiver Filter. Die Grundschaltung des Integrators ist der invertierende Verstärker (Abb 13). Der Rückkopplungswiderstand ist durch einen Kondensator ersetzt. Mit dem Kondensator wird die Rückkopplung vom Ausgang auf den Eingang frequenzabhängig gemacht. Dadurch wird die ganze Schaltung frequenzabhängig .Mit steigender Frequenz nimmt die Ausgangsspannung ab. Der Integrator zeigt Tiefpassverhalten und ermöglicht in einer Bandbreite die gemessene Feldstärke konstant zu halten, indem er die Verstärkung proportional zur Frequenz absenkt. Um den Gleichspannungsbedürfnissen des OP Rechnung zu tragen, wird ein hochohmiger ohmscher Widferstand parallel zum Rückkopplungskondensator eingefügt. Seite 27 von 58 Diplomarbeit von Yilmaz Akyol Abb. 14 Integrator Bevor alle Komponenten des Geräts montiert werden, ist eine Überprüfung dr einzelnen Baugruppen notwendig, um zum Einen die gewünschte Funktion zu überprüfen, zum Anderen mögliche Fehler zu finden und rechtzeitig zu beseitigen. Während der anfänglichen Messungen am Verstärker wurde eine Schwingneigung der Schaltung beobachtet; das hätte am Ausgang zu fehlerhaften Meßgrößen geführt. Als Maßnahme wurden 2 Kondensatoren jeweils zwischen Masse und der positiven wie der negativen Betriebsspannung am OP gelötet. Bestückungsliste ist im Anhang C beigelegt. 5.5.2 Messtechnische Überprüfung Von 10 KHz bis 1000 KHz wurde für ein Spannungsintervall von 125 mV bis 1 V eine Messung durchgeführt.(Tabelle 6) Aus den Balkendiagrammen ist zu erkennen, dass der Verstärker bis zu einer Eingangsspannung von 625 mV seine Proportionalität präzise hält. Lineares Verhalten zeigt der Verstärker zwischen 0.6 V und 6 V. Ueff 0,125 0,25 0,375 0,5 0,625 0,75 0,875 1 10 KHz 2,82 7,95 0 0 0 0 0 0 50 KHz 1,14 2,33 3,46 4,59 5,65 7,07 8,13 0 Seite 28 von 58 Diplomarbeit von Yilmaz Akyol 100 KHz 0,56 1,13 1,76 2,29 2,89 3,46 3,81 4,52 250 KHz 0,22 0,45 0,70 0,91 1,16 1,34 1,62 1,83 500 KHz 0,12 0,23 0,35 0,45 0,565 0,70 0,81 0,92 750 KHz 0,08 0,15 0,22 0,31 0,38 0,46 0,56 0,63 1000 KHz 0,06 0,13 0,17 0,24 0,29 0,34 0,38 0,46 Vertärkung 0,125 0,25 0,375 0,5 0,625 0,75 0,875 1 10 KHz 22,6 31,8 0 0 0 0 0 0 50 KHz 9,1 9,3 9,2 9,19 9 9,4 9,29 0 100 KHz 4,5 4,5 4,7 4,59 4,6 4,6 4,36 4,5 250 KHz 1,8 1,8 1,8 1,83 1,86 1,79 1,85 1,8 500 KHz 0,96 0,93 0,94 0,9 0,9 0,94 0,9 0,9 750 KHz 0,7 0,63 0,6 0,6 0,6 0,6 0,6 0,6 1000 KHz 0,48 0,52 0,47 0,48 0,47 0,45 0,44 0,46 Tabelle 7 Verstärkung 10-1000 KHz Seite 29 von 58 Diplomarbeit von Yilmaz Akyol Abb. 15 Vertstärkung in Diagramm Seite 30 von 58 Diplomarbeit von Yilmaz Akyol 5.5.3 Gleichrichter-Einheit Der Verstärker liefert im angegebenen Frequenzbereich eine maximale Ausgangsspannung von etwa 6 V. Diese hochfrequente Spannung muß in eine Gleichspannung umgewandelt werden. Die Gleichrichtung mittels eines einfachen Dioden- Ein- oder Zweiweg- Gleichrichters wird aufgrund der Diodencharakteristik keine lineare, direkt proportionale Ausgangsgröße ergeben. Dazu eignet sich eine Präzisionsgleichrichterschaltung, die im Gegensatz zu einfachen Gleichrichterschaltungen vermeidet, dass sich die im Anfangsbereich stark nichtlineare Diodenkennlinie direkt in der Gleichrichterkennlinie niederschlägt. Funktion des Präzisionsgleichrichters: Das Prinzip des Gleichrichters beruht darauf, dass durch zwei Operationsverstärker das Eingangssignal zunächst zweifach verstärkt wird Abb. 16 (Abb. 16). Präzisions-Vollweg-Gleichrichter mit geerdetem Ausgang Seite 31 von 58 Diplomarbeit von Yilmaz Akyol Diese Schaltung besteht aus zwei getrennten Funktionseinheiten. In der ersten Funktionseinheit wird das Signal zweifach verstärkt und dem in der zweiten Funktionseinheit einweggleichgerichtetem Signal addiert. Dadurch wird eine der Halbwellen subtrahiert, die andere wird erhalten. Es resultiert eine pulsierende Gleichspannung, die mithilfe eines Kondensators geglättet wird und proportional der Eingangsspannung ist. Ausgangsspannung: (9) Für sinusförmige Wechselspannung: ( 10 ) Diese Ausgangsgleichspannung bezieht sich auf „Masse“. Wirkungsweise OP1: Zitat: „Bei positiven Eingangsspannungen wirkt OP1 als Umkehrverstärker mit der Verstärkung 1. Daraus folgt, dass u2 negativ wird. Die Diode D1 ist leitend, und D2 sperrt. Es wird u1 = −ue . Bei negativen Eingangsspannungen wird u2 > 0. D1 sperrt in diesem Fall; D2 wird leitend und koppelt den Verstärker gegen. Hierdurch wird verhindert, dass OP1 übersteuert wird; daher bleibt der Summationspunkt auf Nullpotenzial. Da D1 sperrt, wird u1 = 0 (Spannung am Summationspunkt). u1 hat demnach folgenden Verlauf: Seite 32 von 58 Diplomarbeit von Yilmaz Akyol Die Abbildung (Abb. 17) zeigt den Verlauf für eine sinusförmige Eingangsspannung. Abb. 17 Spannungsverlauf bei sinusförmiger Eingangsspannung ->Funktion OP1: Einweggleichrichter Wirkungsweise OP2: Ohne den Kondensator C ist der OP2 ein Additionsverstärker. Er bildet den Ausdruck: −ua = n ⋅ (ue + 2u1). ( 27 ) Seite 33 von 58 Diplomarbeit von Yilmaz Akyol Durch Einsetzen von u1 folgt:: ( 11 ) Dies entspricht der Gleichung des idealen Vollweggleichrichters. Der Kondensator C bildet zusammen mit 2 ⋅ n ⋅ R2 einen Tiefpassfilter. Daher ist die Ausgangsspannung gleich dem arithmetischen Mittelwert der vollweggleichgerichteten Eingangsspannung. Bedingung für Gültigkeit der Ausgangsspannung Ua in Gleichung (24) ist, dass die Filterzeitkonstante groß ist gegenüber der Schwingungsdauer von ue . Der Verstärker OP1 muss eine Bandbreite besitzen, die gegenüber der Frequenz der Eingangsspannung groß ist, da beim Gleichrichten viele Oberwellen entstehen. Das Ergebnis ist die gewünschte lineare Abhängigkeit zwischen Aus- und Eingangsgröße. Neben der Abnahme der Nichtlinearität verringert sich beim Präzisionsgleichrichter zusätzlich die Durchlassspannung und die Temperaturabhängigkeit der Dioden. Es entstehen hierdurch wesentlich schärfere Begrenzungskennlinien. Vor der Auswahl eines geeigneten Diodentyps für die Präzisionsschaltung wurden unterschiedliche Lineraritätskurven drei verschiedener Dioden (Ge, Si und Schottky) bei Eingangsspannungen zwischen 1mV − 10V aufgenommen. Die Auswertung hat gezeigt, dass der Einsatz von Silizium-Dioden bei Präzisionsgleichrichtern das gewünschte Linearitätsverhalten aufweist. Die Überprüfung kleiner Abweichungen ist als Toleranzdiagramm aufgezeichnet worden und bestätigt durch einen nahezu horizontalen Verlauf die Gleichmäßigkeit der Wandlung. Diese ist durch eine Abweichung von 1,5% vom Sollwert gekennzeichnet (siehe Anhang D2). Die Auswertung erfolgte grafisch mithilfe von Excel. In der Regel ist ein Messgleichrichter erwünscht, bei dem die Gleichspannung in einem weiten Frequenzbereich der Wechselspannung proportional ist. Hierzu werden Operationsverstärker verwendet, die eine gleichmäßig große Verstärkungs- Seite 34 von 58 Diplomarbeit von Yilmaz Akyol Bandbreite (Unity-Gain Bandwidth) und eine kurze Anstiegszeit aufweisen (Slew Rate). Für den vorgesehenen Messvorgang ist eine Bandbreite von 50 Khz bis 400 KHz von der Bedeutung. Was die Anstiegszeit angeht, wurde bei einem Testablauf das Übertragungsverhalten des relativ günstigen und gängigen Operationsverstärkers vom Typ LF412 überprüft. Das Übertragungsverhalten zeigt (Abb. 16), dass unter der Berücksichtigung des festgelegten Arbeitsbereiches Α (0..7V) , ein für die vorgesehene Anwendung ausreichendes Ergebnis. Tabelle von Okay, durch eigene Messung ersetzen!!! Abb. 18 Übertragungskennlinie des OPV : LF412 Dieser Bereich sichert die bestimmungsgemäße Funktion des Gleichrichters. Das Besetzungsverhältnis zwischen der maximal messbaren Leerlaufspannung von 10V und der gleichgerichteten Spannung für die Ausgabe-Einheit (digitale Anzeige) ist aus dimensionstechnischen Gründen auf 5V reduziert worden. Auch dieser Arbeitsbereich (Arbeitsbereich B) sichert eine zufrieden stellende und sichere Funktion des Gleichrichters. V/f 50 KHz 100 KHz 200 KHz 300 KHz 400 KHz 500 KHz 600 KHz Seite 35 von 58 Diplomarbeit von Yilmaz Akyol 0,25 -0,218 -0,214 -0,208 -0,194 -0,181 -0,169 -0,167 0,5 -0,453 -0,44 -0,43 -0,415 -0,404 -0,396 -0,374 0,75 -0,676 -0,667 -0,655 -0,641 -0,618 -0,602 -0,592 1 -0,9 -0,897 -0,884 -0,865 -0,841 -0,828 -0,803 1,25 -1,141 -1,126 -1,12 -1,12 -1,09 -1,04 -1,04 1,5 -1,35 -1,355 -1,33 -1,3 -1,28 -1,24 -1,23 1,75 -1,59 -1,583 -1,58 -1,54 -1,5 -1,46 -1,44 2 -1,8 -1,785 -1,78 -1,76 -1,73 -1,66 -1,61 2,25 -2,04 -2,033 -2,02 -1,97 -1,92 -1,87 -1,79 2,5 -2,27 -2,251 -2,24 -2,19 -2,12 -2,03 -1,98 2,75 -2,47 -2,518 -2,45 -2,42 -2,33 -2,22 -2,14 3 -2,72 -2,692 -2,68 -2,62 -2,52 -2,33 -2,37 3,25 -3 -3,03 -3,03 -2,9 -2,81 -2,58 -2,7 3,5 -3,2 -3,24 -3,22 -3,11 -2,96 -2,67 -3,06 3,75 -3,45 -3,44 -3,38 -3,35 -3,07 -2,97 -3,35 4 -3,68 -3,71 -3,68 -3,44 -3,16 -3,18 -3,72 4,25 -3,89 -3,85 -3,83 -3,65 -3,22 -3,41 -4,18 4,5 -3,97 -3,93 -3,91 -3,8 -3,41 -3,72 -4,23 4,75 -3,9 -3,91 -3,86 -3,71 -3,38 -3,71 -4,19 5 -3,84 -3,81 -3,79 -3,58 -3,35 -3,67 -4,13 5,25 -3,73 -3,73 -3,71 -3,42 -3,3 -3,64 -4,07 5,5 -3,6 -3,61 -3,57 -3,31 -3,28 -3,58 -4,02 Tabelle 8 Linearität des Gleichrichters in Tabelle Seite 36 von 58 Diplomarbeit von Yilmaz Akyol Abb. 19 Linearität des Gleichrichters in Diagramm Die Gleichrichter hat bis etwa 2 eine ausreichend ineare Charakteristik. 5.5.4 Versorgungs-Einheit mit DC/DC-Wandler Geplant ist der betrieb als Handgerät, d.h., als Stromversorgung wird eine 9 VBatterie gewählt, die auch insbesondere im Batteriefach des verwendeten kommerziellen Gehäuses Platz findet.: Die zum Einsatz kommenden Operationsverstärker benötigen zum Betrieb ±12V . ( Betrieb der Operationsverstärker mit 9V Versorgung zeigt nicht die gewünschte Linearität ) Seite 37 von 58 Diplomarbeit von Yilmaz Akyol Als Anzeigeeinheit wird ein handelsübliches sog. Panelmeter verwendet, eine komplette Baugruppe mit Eingangsverstärker usw und Anzeige mitf einem 3 1/2 stelligen Flüssigkristall- Display ( LCD ). Diese Anzeigeeinheit kann direkt über den Schalter mit der 9 V- Batterie versorgt werden. Minusanschluß der Betriebsspannung und Minusanschluß des Messeingangs sind bei diesen Schaltungen nicht identisch. Um die für den Betrieb von Verstärker und Gleichrichter notwendige symmetrische Betriebsspannung zu erzeugen, wird – ebenfalls als fertig verfügbare Komponente – ein DC-DC- Wandler verwendet. . Durch den DC/DC–Wandler wird eine Gleichspannung in eine andere umgewandelt. Dazu wird die Transformatoren Versorgungsspannung auf den gewünschten hochfrequent zerhackt, Sekundärspannungsbetrag über HF- gebracht, gleichgerichtet und durch Ta-Kondensatoren (C=10µF) gesiebt. Der hier verwendete DC/DC-Wandler ist vom Typ SIM 2-0915D-SIL7 und liefert bei einer Versorgung von 9VDC mindestens die benötigten ±12V . Seine Leistungsübertragung beträgt 2W bei 82mA Stromaufnahme. Für die Betriebsspannung des Messgerätes wurde letztendlich eine 9V Batterie verwendet. Es wurde eine Reihe von Messungen durchgeführt, um die minimale Betriebsspannung für einen hinlänglich linearen Betrieb zu ermitteln. Die Messungen haben gezeigt, dass die DC/DC-Versorgungsspannung mindestens 7,5V betragen muss, andernfalls ist kein korrektes Messergebnis zu erwarten. Zur Signalisierung einer Unterspannung ist eine Batteriekontrollleuchte eingebaut worden. In der Schaltung ist die Umsetzung dieser Kontrollfunktion durch einen Komparator realisiert worden, der seine Ansprechschwelle bei 7.5 V hat. 5.5.5 LCD-Einheit Die verwendete LCD-Einheit ist vom Typ ………... Sie eignet sich durch die geringen Maße und durch den geringen Stromverbrauch von 2mA für den Einsatz in mobilen Handgeräten. Seite 38 von 58 Diplomarbeit von Yilmaz Akyol Als Darstellung dient eine 3 1/2stellige 7- Segmentanzeige mit wählbarem Dezimal punkt Der Skalenendwert beträgt „200mV“ ( 199.9 ) und ist dementsprechend schaltungstechnisch berücksichtigt worden. Die Genauigkeit der verwendeten Anzeige beträgt typisch 0,05% und maximal 0,1%. (Abb. 20) zu entnehmen. Anschließend folgt der Belegungsplan (Abb. 21). Abb. 20 Ansteuerung der LCD-Messeingänge; Multi-Voltmeter Auf eine zunächst geplante Möglichkeit der Umschaltung des Dezimalpunktes wurde verzichtet; der Dezimalpunkt wird über eine Drahtbrücke durch einen High-Pegel (Abb. 22). Der kleinste darstellbare Messbereich für die vorgesehene Anwendung beträgt „199,9“ A/m.. Seite 39 von 58 Diplomarbeit von Yilmaz Akyol Abb. 21 Schaltung der Dezimalpunktsteuerung Abb. 22 Beispiele für die Dezimalpunktansteuerung: a) 199,9 ; b) 1,999 5.6 Fertigung des Messgerätes In diesem Kapitel wird die Fertigungsarbeit der Messgerät-Entwicklungsschritte fotodokumentierend veranschaulicht. Das Feldstärkenmessgerät besteht aus einem kompakten Kunststoffgehäuse im handlichen Format. Bei der Dimensionerung des Geräts ist auf die optimale mechanische Anpassung der Leiterplatte(n) zu achten. 5.6.1 Gehäuse für die Verstärker und Gleichrichter-Einheit Seite 40 von 58 Diplomarbeit von Yilmaz Akyol Abb. 23 Verstärker &Gleichrichtergehäuse Die Verstärker &Gleichrichter-Einheit (Abb. 22) besteht aus einem zweiteiligen PVCGehäuse. Das Gehäuse ist durch vier seitlich angebrachte M3-Gewindebuchsen für die Befestigung einer Leiterplatte geeignet. Die Schmalseiten des Gehäuses sind abtrennbar, so dass man Sub-D.-Buchsen montieren kann, die von der einen Seite mit dem Anzeigegerät, von der anderen mit der Sonde verbunden werden. 5.6.2 Zusammensetzung der Verstärker-Gleichrichter-Einheit Seite 41 von 58 Diplomarbeit von Yilmaz Akyol Abb. 24 Verstärker-Gleichrichter-Einheit Die Verstärker-Gleichrichter-Einheit ist, wie in Abbildung (Abb. 25) zu erkennen, aus folgenden Baugruppen zusammengesetzt worden: o Integrator, bestehend aus einem OP vom Typ: LF411 o Präzisionsgleichrichter, bestehend aus einem OP vom Typ: LF412A o 2X SUB-D-Buchsen zum Empfangen des Signals und Ausführen der Signale zum Messgerät 5.6.3 Sondenadapter Abb. 25 a) Sondenadapter, b) Makrolon-Rohr als Träger Als Sondenträger wurde eine Eigenkonstruktion ( Sub- D- Stecker mit Makrolonrohr ) verwendet. Die Verbindung zum Handgerät ferolgt ebanfalls über Sud-DKomponenten und ein handelsübliches Datenkabel. Seite 42 von 58 Diplomarbeit von Yilmaz Akyol Der lackisolierte Kupferdraht (Abb. 24b) wird an die Pins der SUB-D-Kupplung gelötet. Abb. 26 Im a) SUB-D-Pinbelegung, b) Sondenadapter mit Makrolon-Rohr Inneren des Makrolon-Rohr wereden auch die verdrillten Spulenanschlussleitungen geführt. 5.6.4 Messgerätgehäuse Abb. 27 Gehäuse a) Rückansicht, außen: b) Frontansicht, außen Das Gehäuse für das Messgerät besteht aus zwei Teilen. Die Frontseite (Abb28a) bietet ausreichend Platz für die vorgesehenen Bedienelemente. Die Unterseite (Abb. Seite 43 von 58 Diplomarbeit von Yilmaz Akyol 28b) ist mit einem schließbaren Fach versehen, das für Batterien vom Typ 9V genutzt wird. Die Tiefe des Gehäuses reicht aus, um an der Stirnseite des Gehäuses eine SUB-D-Buchse für die Signalzuführungen anzubringen. 4.5.5 LCD-Einheit ????? Die lCD- Einheit wird in einen passenden Gehäuseausschnitt verbracht und durch Rastung fixiert. Abb. 28 LCD-Einheit: a) LCD-Gehäusebefestigung b) Geklemmt Seite 44 von 58 Diplomarbeit von Yilmaz Akyol 5.6.5 Verteilung der Funktionsgruppen Abb. 29 Zusammengesetztes Messgerät (Innenansicht) Die Zusammensetzung des Messgerätes (Abb. 30) erfolgte aus folgenden Komponenten: O LCD Einheit als Anzeige o Ein DC/DC-Wandler dient zur Spannungsversorgung der OPs. o Eine rote LED-Anzeige signalisiert eine niedrige Batteriespannung. o Das Messgerät wird durch einen Kippschalter eingeschaltet. o Eine vorne angebrachte SUB-D-Kupplung dient als Schnittstelle zur VerstärkerGleichrichter-Einheit. o Alle mechanischen und elektronischen Bauelemente sind auf der Leiterplatine 1 zusammengeführt. Die Ansteuerung der LCD-Anzeige erfolgt ebenfalls auf dieser Leiterplatte. Seite 45 von 58 Diplomarbeit von Yilmaz Akyol 5.6.6 Schnittstelle am Messgerät Abb. 30 SUB-D-Schnittstelle: a) Pin-Nummerierung der Schnittstelle, b) SUB- D-Kupplung Die Schnittstelle am Messgerät ist durch eine 9-polige SUB-D-Schnittstelle (Abb. 28) realisiert worden. Die Pin-Belegung (Abb. 31) ist aus der folgenden Tabelle (Abb. 32) zu entnehmen: Pin Belegung Abb. 31 Pin-Belegungsplan an der Messgerätschnittstelle Seite 46 von 58 Diplomarbeit von Yilmaz Akyol Die Länge der Verbindungsleitung zwischen dem Messgerät und der VerstärkerGleichrichter- Einheit beträgt 1 m. Eine Gesamtübersicht über die Pin-Belegungen aller Schnittstellen liegt im Anhang I bei. 5.6.7 Endmontiertes Messgerät Abb. 32 Ansicht des Messgerätes: a) M. Rückansicht b) Messgerät Frontansicht Die Rückansicht (Abb. 30a) zeigt den geöffneten Zustand des Batteriefaches, das für 9 V Batterien vorgesehen ist. Auf der Frontansicht (Abb. 30b) ist mit Schalter und Anzeige Elementen angeordnet im fertigen Zustand zu sehen. 5.7 Funktionsprüfung des Messgerätes Seite 47 von 58 Diplomarbeit von Yilmaz Akyol Nachdem unabhängig bereits das Messgerät bzw. überprüft worden voneinander die Verstärker-Gleichrichter-Einheit sind, musste anschließend die Gesamtfunktion beider Einheiten geprüft werden. Die Feldsubstitution wurde von einem Funktionsgenerator übernommen, dessen Frequenz zwischen 10 bis 500 KHz und einer Lerlaufspannung (U0) von 0,6 bis 6V betrieben wurde. Die 6 Volt wurde aus einem besonderen Grunde ausgewählt . Nach der Messung (tabelle 6) am Verstärker wurde festgestellt, dass er zwischen etwa 50 un d etwa 500 kHz die gewünschte abnehmende Verstärkung hat. Nach Tabelle 6 soll liegt bei maximaler, frequenzabhängiger Verstärkung am Ausgang des Verstärkers eine Spannung von etwa 5,6 V an, Durch die Spannungsteiler soll der Gleichrichter die für den linearen Betrieb notwendige maximale Spannung von 2 V bekommen. Die nach dem Gleichrichter erhaltene 1,7 V Gleichspannung wird durch den nächsten Spannungsteiler auf 0,2 V reduziert und auf die Anzeige des Messgeräts gelegt..(Abb.34) Die Wechselspannung wurde nacheinander auf die Pins 2/4, des SUB-D- Anschlusses am Sondenadapter eingekoppelt, sodass die Anzeige-Einheit am Messgerät die angelegte Spannung anzeigen konnte. Der durch die Einfügung der Generatorimpedanz entstehende Fehler ist kleiner als 0,7% und kann daher vernachlässigt werden. Bei der Bedienung des Messgerätes ist darauf zu achten, dass die Messbereiche nur in Verbindung mit der dazugehörigen Sonde ein korrektes Ergebnis liefern. Abb. 33 Veranschaulich auf die komplette Schaltung Seite 48 von 58 Diplomarbeit von Yilmaz Akyol 6 6.1 Entwicklung der Feldsonden und Beschreibung des Messsystems Vorüberlegungen (Anforderungen an die Feldsonde) Für die Festlegung des Leiterquerschnitts der Feldsonden wurde lackisolierter Kupferdraht mir einem Durchmesseser von 0,22 mm nach Verfügbarkeit verwendet. (Abb.35) Abb. 34 0,22 mm Kupferdraht Das vermessene Feld beträgtt nach den Voruntersuchungen bis 200 A/m. Für diese Feldstärke ist keine Überlastung zu erwarten. . Demnach ist ein lackisolierter Kupferdraht mit 0,22mm Durchmesser ohne Bedenken für diesen Anwendungsfall verwendbar (Abb. 35). 6.2 Überblick über das Messverfahren und theoretischer Hintergrund Seite 49 von 58 Diplomarbeit von Yilmaz Akyol Bei den Wellenlängen des vorgesehenen Frequenzbereichs ist nur die magnetische Komponente des elektromagnetischen Feldes interessant, deswegen werden überwiegend die Eigenschaften magnetischer Antennen behandelt. Für die Aufnahme von magnetischen Feldlinien eignen sich so genannte Ring antennen (Abb. 33) Ihr Aufbau weist meist einen kreisförmigen oder quadratischen Querschnitt auf. Abb. 35 Ringantenne (prinzipieller Aufbau) Die Abbildung (Abb. 36) veranschaulicht schematisch die Entwicklung einer Ringantenne Allgemein muss unterschieden werden, ob die Spule auf einen magnetisierbaren Kern gewickelt wird, oder ob sie als sogenannte Luftspule ganz ohne Wickelkern oder auf einen Isolierkörper gewickelt wird. Hier sollen zunächst Luftspulen betrachtet werden. Nach dem Induktionsgesetz ist die in der Leiterschleife induzierte Spannung proportional zur Flussänderung in der Spule. Wenn die Spule einem magnetischen Wechselfeld ausgesetzt wird, wird in ihr eine EMK induziert, die im Leerlauf in dem Kreis eine gleichgroße Leerlaufspannung U0 (Gl. 30) hervorruft.. Mit der Kreisfläche A Seite 50 von 58 Diplomarbeit von Yilmaz Akyol in m2, der Frequenz ƒ in Hz und der Windungszahl n ergibt sich bei der Ringantenne die Leerlaufspannung (30) wobei bei optimaler Ausrichtung cosϕ = 1 wird. Zur Ermittlung der magnetischen Feldstärke wird ( siehe …… ) die Leerlaufspannung der offenen Spule genutzt. Diese hängt von der magnetischen Feldstärke, der umspannten Fläche, der Frequenz und der Windungszahl (Gl. 30) ab. Aus diesen wurde bei einer durch die Mechanik des Trägerrohres definierten Fläche die Windungszahl so gewählt werden, dass sich bei einer H- Feldstärke und einer Frequenz von 500 kHz und 200A/m eine Leerlaufspannung von 6V (Abb. 5.2-3) ergibt . Eine weitere Sonde ist aus den Dimensionen der kleinen Sonde abgeleitet worden und sind für die Feldmessung unmittelbar um den Prüfling vorgesehen. Sonde [Empfindlichkeit] Durchmesser Windungen 200 A/m 12 mm 64 20 A/m 22 mm 200 Abb. 36 Rahmenfläche Berechnung der Rahmenlänge bei U0 = 0,6 V Die in der Tabelle errechneten Durchmesser sind bei der Fertigung berücksichtigt worden. 6.3 Fertigung der Sonden Seite 51 von 58 Diplomarbeit von Yilmaz Akyol Im folgenden Kapitel werden die Fertigungsarbeiten der Sonden dokumentiert und mit Fotos veranschaulicht. Der Aufbau der drei Sonden erfolgte in drei Arbeitsschritten. 6.3.1 Wickelkörper Die Einhaltung der festgelegten und für die Berechnung verwendeten Rohrdurchmesser wurde durch einen Wickelkörper vereinfacht (Abb. 37 ). Abb. 37 7 Sondenkörper Kalibriervorgang des Messgerätes Die Reproduzierbarkeit von Messergebnissen und der normgerechte Nachweis von Feldstärken sind wichtige Kriterien einer Kalibrierung. Der Kalibriervorgang für derartige Messgeräte stellt eine Herausforderung dar. Der Prüfaufbau setzt ein berechenbares Vergleichsfeld mit 200 A/m voraus. Dazu ist es notwendig, ein magnetisches Wechselfeld mit ausreichend großer Homogenität zu erzeugen (Norm-Magnetfeld). Kalibrierung mit Helmholzspule Der Kalibriervorgang diente dazu, die Homogenität des Feldes bzw. die Rastergröße Seite 52 von 58 Diplomarbeit von Yilmaz Akyol abschätzen zu können, die für die eigentliche Messung geeignet ist. Im Anschluss an den Kalibriervorgang ist eine Betrachtung der möglichen Messfehler aufgeführt. Als Anmerkung ist hinzuzufügen, dass Personen das magnetische Feld nicht beeinflussen, sodass das Messgerät vom Messenden direkt ins Feld gebracht werden darf. Nennenswerte Verzerrungen des magnetischen Feldes sind nur durch Gegenstände aus ferromagnetischen Metallen zu erwarten. 8 Fazit Seite 53 von 58 Diplomarbeit von Yilmaz Akyol 9 Anhänge 9.1 Datenblätter Unnumeriert im Anhang 9.2 Literaturverzeichnis Internetquellen : 9.3 Meßgeräteliste Inv.-Nr Gerätetyp 50138 Speicheroszilloskop Bezeichnung 0,5 9350 CL Hersteller Seriennr. LeCroy 13023 881625/005 GHz 50121 NF- Generator SPN R&S NF- Generator SPN Agilent 50122 RLC- Meßbrücke 50123 Speicheroszilloskop VideoBridge 2000 ESI 0,2 THS 730 A Tektronix B011749 GHz 50125 Digitalvoltmeter 3456 A HP 2825A-20387 Noch ergänzen 9.4 Abb. 1 Abbildungsverzeichnis Feldstärke effekt ........................................................................................................................... 7 Seite 54 von 58 Diplomarbeit von Yilmaz Akyol Abb. 2 Helmholtz Spule ............................................................................................................................ 8 Abb. 3 Die Oberfläche Farbe-Plot zeigt die magnetische Flussmittel Dichte. Die Pfeile zeigen an, die magnetische Feldstärke (H) und die Richtung ......................................................................................... 8 Abb. 4 Der magnetische Fluss Dichte Profil. (A) die Parzellen zeigen das Profil entlang einer radial größten Durchmesser Linie durch das Recht Achse zwischen den Windungen und ein Profil genommen entlang der Achse (b) getroffen. Ein hohes Maß an Einheitlichkeit ist deutlich gezeigt ........................... 9 Abb. 5 Schwingkreis allgemein ( Darstellung mit Schaltzeichen gemäß EN 60617-4:1996) .................... 10 Abb. 6 : Schwingkresikompenstion......................................................................................................... 12 Abb. 7 Helmholtzsystem R=30 cm , I=10 mA , N=10 ............................................................................. 14 Abb. 8 :Richtdiagramm der vorgegebenen Antenne ............................................................................... 16 Abb. 9 : Spulen mit unterschiedlichen Windungszahlen ......................................................................... 18 Abb. 10 : Schematische Darstellung einer allgemeinen Messkette ........................................................... 22 Abb. 11 Sensor als erstes Glied einer Messkette ...................................................................................... 23 Abb. 12 Schematischer Aufbau des Messgerätes ..................................................................................... 24 Abb. 13 ESB des Messempfängers ............................................................................................................ 26 Abb. 14 Integrator .................................................................................................................................... 27 Abb. 15 Vertstärkung in Diagramm ......................................................................................................... 29 Abb. 16 Präzisions-Vollweg-Gleichrichter mit geerdetem Ausgang .......................................................... 30 Abb. 17 Spannungsverlauf bei sinusförmiger Eingangsspannung ............................................................. 32 Abb. 18 Übertragungskennlinie des OPV : LF412 ...................................................................................... 34 Abb. 19 Linearität des Gleichrichters in Diagramm ................................................................................... 36 Abb. 20 Ansteuerung der LCD-Messeingänge; Multi-Voltmeter ............................................................... 38 Abb. 21 Schaltung der Dezimalpunktsteuerung........................................................................................ 39 Abb. 22 Beispiele für die Dezimalpunktansteuerung: a) 199,9 ; b) 1,999 .................................................. 39 Abb. 23 Verstärker &Gleichrichtergehäuse .............................................................................................. 40 Abb. 24 Verstärker-Gleichrichter-Einheit.................................................................................................. 41 Abb. 25 a) Sondenadapter, b) Makrolon-Rohr als Träger ......................................................................... 41 Abb. 26 a) SUB-D-Pinbelegung, b) Sondenadapter mit Makrolon-Rohr .................................................... 42 Abb. 27 Gehäuse a) Rückansicht, außen: b) Frontansicht, außen ............................................................. 42 Abb. 28 LCD-Einheit: a) LCD-Gehäusebefestigung b) Geklemmt ............................................................... 43 Abb. 29 Zusammengesetztes Messgerät (Innenansicht) ........................................................................... 44 Abb. 30 SUB-D-Schnittstelle: a) Pin-Nummerierung der Schnittstelle, b) SUB- D-Kupplung ...................... 45 Abb. 31 Pin-Belegungsplan an der Messgerätschnittstelle ....................................................................... 45 Abb. 32 Ansicht des Messgerätes: a) M. Rückansicht b) Messgerät Frontansicht ..................................... 46 Abb. 33 Veranschaulich auf die komplette Schaltung ............................................................................... 47 Abb. 34 0,22 mm Kupferdraht .................................................................................................................. 48 Abb. 35 Ringantenne (prinzipieller Aufbau)............................................................................................. 49 Abb. 36 Berechnung der Rahmenlänge bei U0 = 0,6 V .............................................................................. 50 Seite 55 von 58 Diplomarbeit von Yilmaz Akyol Abb. 37 9.5 Sondenkörper ............................................................................................................................. 51 Tabellen Tabelle 1 : Die Vorteile und Nachteil von unterschiedliche RFID Frequenzen Tabelle 2 : Die Leerlaufspannung der Spulen in Abhängigkeit von der Frequenz bei einer magnetischen Feldstärke von 100 dB µA /m 5 13 Tabelle 3 : Aufnahme der vorgegeben Spule in Upp, Ueff und A/m 17 Tabelle 4 : Aufnahme der Spule mit 115 µH in Upp, Ueff und A/m 19 L2 ( 100 Wdg ) 19 Tabelle 5 : Aufnahme der Spule mit 605µH in Upp, Ueff und A/m 20 Tabelle 6 : Verstärkung 10-1000 KHz 28 Tabelle 7 : Linearität des Gleichrichters in Zahlen 35 Seite 56 von 58 Diplomarbeit von Yilmaz Akyol Inhalt 1 Einleitung .............................................................................................................. 2 2 Grundlagen ........................................................................................................... 2 2.1 Kurzdarstellung zur RFID ............................................................................... 2 2.2 RFID Lösungen - Aktive Transponder / Passive Transponder ........................ 3 2.2.1 Aktiv: ......................................................................................................... 3 2.2.2 Passiv: ...................................................................................................... 3 2.3 3 4 5 Frequenzbereiche ........................................................................................... 3 Aufgabenstellung .................................................................................................. 5 3.1 Beschreibung der Aufgabenstellung ............................................................... 5 3.2 Parameter ....................................................................................................... 6 3.3 Ermittlung der Messbereiche .......................................................................... 6 3.4 Definition des Prozesses ................................................................................ 6 3.4.1 Helmholzspule .......................................................................................... 7 3.4.2 Kalibrierung............................................................................................... 9 3.4.3 Schwingkreiskompensation .................................................................... 10 Einführung .......................................................................................................... 13 4.1 Überprüfung der Messsonden für die Voruntersuchung ............................... 13 4.2 Ermittlung des Wandelmaßes der Meßsonden ............................................. 15 4.3 Durchführung der Messung mit der kalibrierten Messsonde......................... 15 4.3.1 Aufnahme des Feldlinienverlaufs ............................................................ 15 4.3.2 Optimierung verschiedener Spulen......................................................... 18 Entwicklung des Feldstärkenmessgerätes.......................................................... 20 5.1 Meßverfahren ............................................................................................... 20 5.1.1 Vorgehen hier ......................................................................................... 21 5.2 Vorüberlegungen und Anforderungen........................................................... 21 5.3 Schematischer Aufbau einer Messeinrichtung .............................................. 22 5.4 Messprinzip .................................................................................................. 24 5.5 Schaltungskonzept und Realisierung der einzelnen Funktionseinheiten ...... 26 5.5.1 Integrator ................................................................................................ 26 5.5.2 Messtechnische Überprüfung ................................................................. 27 Seite 57 von 58 Diplomarbeit von Yilmaz Akyol 5.5.3 Gleichrichter-Einheit ............................................................................... 30 5.5.4 Versorgungs-Einheit mit DC/DC-Wandler ............................................... 36 5.5.5 LCD-Einheit ............................................................................................ 37 5.6 5.6.1 Gehäuse für die Verstärker und Gleichrichter-Einheit............................. 39 5.6.2 Zusammensetzung der Verstärker-Gleichrichter-Einheit ........................ 40 5.6.3 Sondenadapter ....................................................................................... 41 5.6.4 Messgerätgehäuse ................................................................................. 42 5.6.5 Verteilung der Funktionsgruppen ............................................................ 44 5.6.6 Schnittstelle am Messgerät ..................................................................... 45 5.6.7 Endmontiertes Messgerät ....................................................................... 46 5.7 6 Fertigung des Messgerätes .......................................................................... 39 Funktionsprüfung des Messgerätes .............................................................. 46 Entwicklung der Feldsonden und Beschreibung des Messsystems ................... 48 6.1 Vorüberlegungen (Anforderungen an die Feldsonde) ................................... 48 6.2 Überblick über das Messverfahren und theoretischer Hintergrund ............... 48 6.3 Fertigung der Sonden ................................................................................... 50 6.3.1 Wickelkörper ........................................................................................... 51 7 Kalibriervorgang des Messgerätes ..................................................................... 51 8 Fazit .................................................................................................................... 52 9 Anhänge ............................................................................................................. 53 9.1 Datenblätter .................................................................................................. 53 9.2 Literaturverzeichnis....................................................................................... 53 9.3 Meßgeräteliste .............................................................................................. 53 9.4 Abbildungsverzeichnis .................................................................................. 53 9.5 Tabellen ........................................................................................................ 55 10 Erklärung ......................................................................................................... 58 Seite 58 von 58 Diplomarbeit von Yilmaz Akyol 10 Erklärung Hiermit versichere ich, die vorliegende Arbeit selbständig und ausschließlich unter Verwendung der im Text und Literaturverzeichnis angegebenen Informationsquellen angefertigt zu haben. Berlin, im August 2009 Information Im Text verwendete Handelsnamen und -bezeichnungen dienen nur zur Information des Lesers.