Ein Rastertunnelmikroskop im Eigenbau
Werbung

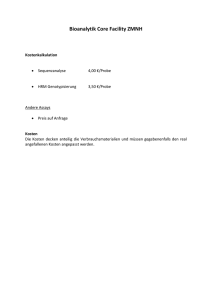
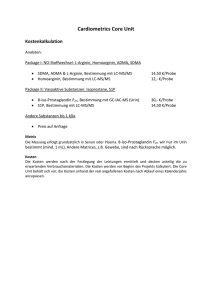
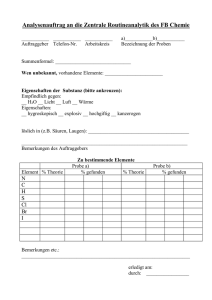
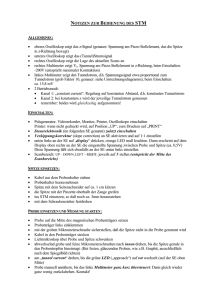
DEUTSCHE GESELLSCHAFT FÜR ZERSTÖRUNGSFREIE PRÜFUNG E.V. ZfP-Sonderpreis der DGZfP beim Landeswettbewerb Jugend forscht RHEINLAND-PFALZ Ein Rastertunnelmikroskop im Eigenbau Christian Behrens Philipp Schuster Schule: TU Kaiserslautern Postfach 3049 67653 Kaiserslautern Ruprecht-Karls-Universität Heidelberg Grabengasse 1 69117 Heidelberg Jugend forscht 2010 Ein Rastertunnelmikroskop im Eigenbau Christian Behrens & Philipp Schuster März 2010 Vorgelegt im Rahmen des Wettbewerbs Jugend Forscht Kontakt Christian Behrens Im Neuenheimer Feld 681 69121 Heidelberg Mail: [email protected] Philipp Schuster Weinheimer Landstraße 55 55232 Alzey Mail: [email protected] Kurzzusammenfassung Mit vielen wissenschaftlichen Instrumenten kommen Schüler nie in Kontakt. Ihre Anschaffung nur zu Lehrzwecken ist den Schulträgern in der Regel zu teuer. Dabei sind es nicht zuletzt faszinierende Geräte wie Rastertunnelmikroskope, die Schüler immer wieder für die Naturwissenschaften begeistern. Als wir in der 12. Klasse mit unserem Projekt begannen war es deswegen unser Ehrgeiz, selbst ein kostengünstiges und genau arbeitendes Rastertunnelmikroskop herzustellen. Da unsere Elektronik-Kenntnisse damals allenfalls grundlegend waren, nahmen wir als Grundlage das „Schüler-STM“-Modell der Universität Münster, wie es bereits eine JugendForscht-Gruppe vor uns getan hatte. Leider mussten wir aber feststellen, dass die entsprechende Arbeitsgruppe der Universität Münster bereits aufgelöst worden war. Mehr als den Metallrumpf sowie die benötigten PiezoKristalle konnten wir von dort nicht mehr erhalten. Die übrigen Bestandteile mussten wir selbst nachbauen. Die Hauptplatinenelektronik konnten wir anhand der Schaltpläne des ehemaligen Teams nachbilden. Die Tunnelstromvorverstärkerschaltung beinhaltete jedoch Bauteile, die heute nicht mehr verfügbar sind; hier mussten wir auf neue Schaltungselemente zurückgreifen. Im Nachhinein sollte sich dies aber als Vorteil herausstellen: Mit modernerem Chipdesign und neueren Bauteilen konnten wir dank SMD-Bauweise die Störanfälligkeit und damit auch die Genauigkeit und Rauschtoleranz verbessern. Auch die Software haben wir von Grund auf neu konzipiert und entwickelt. Mit ihr kann man die Aufnahmeparameter über eine übersichtliche Bedienoberfläche einstellen. Entsprechend steuert die Software dann die genaue Spannungsänderung der Mikroskopelektronik. So wird die Scaneinheit via Piezo-Stacks über die zu untersuchende Probe bewegt. Auf diese Weise wird eine Wertetabelle „gerastert“, welche die Höhenwerte der Probe wiederspiegelt. Die Software erzeugt daraus ein 2-dimensionales Bild der Probe, das ähnlich einer geographischen Höhenprofilkarte ebenfalls die Höhenwerte der Probe enthält. Schließlich wird aus dem 2-dimensionalen Bild ein 3-dimensionales Modell erzeugt, dass sich in beliebigem Neigungswinkel und von allen Seiten betrachten lässt. Die Schnittstellentechnik war beim „Schüler-STM“ noch mittels ISA-Karte mit DA- und ADWandlern realisiert worden. Heutige Computersysteme verfügen jedoch nur noch selten über ISA-Slots. Aus diesem Grund entschieden wir uns, die Steuerungs- und Interfacetechnik komplett neu zu entwerfen. Wir haben uns dabei auf den heute üblichen, standardisierten Anschluss festgelegt: Das Interface arbeitet auf USB-Basis und ist plug&play-fähig. Zudem benötigt es keinerlei Treiber. Das Mikroskop lässt sich somit selbst an Notebooks ohne jeglichen Installationsaufwand einsetzen. Mit unserem Mikroskop ist es möglich, eine Probenfläche von bis zu 722x722 nm mit einer maximalen Auflösung von 0,1 nm zu untersuchen Inhaltsverzeichnis 1| Einleitung ........................................................................................................ 4 2| Hauptteil ......................................................................................................... 4 2.1| Die Mess- und Steuerungselektronik des Rastertunnelmikroskops ........................... 5 2.1.1| Stromversorgung .................................................................................................. 5 2.1.2| Spannungsversorgung für die Piezokristalle zum Scannen in x- und y-Richtung 6 2.1.3| Sample Bias .......................................................................................................... 6 2.1.4| Vorverstärker für den Tunnelstrom ..................................................................... 6 2.1.5| Z-Control ............................................................................................................... 8 2.2| USB-Interface ............................................................................................................... 9 2.2.1| Aufbau und Aufgabenbereich der USB-Platine .................................................... 9 2.2.2| Umsetzung des Auslesens und der Ansteuerung der Mikroskopelektronik durch ADCs und DACs ................................................................................................................. 10 2.3| Software..................................................................................................................... 11 2.3.1| Bedienung der Software..................................................................................... 11 2.3.2| Der Scanvorgang ................................................................................................ 13 2.3.3| Visualisierungsprozess der Messergebnisse ...................................................... 13 2.4| Voraussetzungen für den Betrieb des Mikroskop ..................................................... 14 3| Verbesserungsmöglichkeiten ........................................................................ 16 4| Quellenverzeichnis ........................................................................................ 17 4.1| Literatur ..................................................................................................................... 17 4.2| Internetquellen .......................................................................................................... 17 Ein Rastertunnelmikroskop im Eigenbau 4 1| Einleitung Die Rastertunnelmikroskopie wurde in den achtziger Jahren entwickelt. Sie beruht auf dem so genannten Tunneleffekt: Nähert man zwei elektrische Leiter (in diesem Fall die mit Gold bedampfte Probe und die Mikroskopspitze) auf atomarer Größenordnung einander an, können einzelne Elektronen zwischen den beiden ausgetauscht werden, die Elektronen „tunneln“. Wird eine kleine Spannung angelegt fließt ein messbarer Tunnelstrom, der exponentiell von der Entfernung von Spitze und Probe abhängt. Über viele punktweise Einzelmessungen an einer Probe lässt sich dadurch ein Höhenprofil „rastern“. Um die extrem feinen Messspitzen herzustellen verwendet man Platin-Iridiumoder Wolfram-Draht. Die Spitze wird mit Piezoelementen gesteuert, da sie sich beim Anlegen verformen. einer elektrischen Damit kann Spannung die Spitze Abb. 1 Beim punktweisen Abrastern entsteht ein Tunnelstrom zwischen Messspitze und Probe nanometergenau gesteuert werden. Unser Mikroskop verwendet drei Piezostapel, zwei zur seitlichen Steuerung und einen zur Steuerung der Höhe der Spitze. Bei der Durchführung der Messung unterscheidet man zwei verschiedene Messmodi: Im „constant height mode“ bleibt die Spitze stets in der gleichen Höhe, die jeweiligen Entfernungen zur Probe werden aus den unterschiedlichen Tunnelströmen berechnet. Bei sehr unregelmäßiger Oberfläche der Probe besteht allerdings die Gefahr, dass Probe und Spitze kollidieren. Im „constant current mode“ gibt es dieses Risiko nicht. Hier wird der Tunnelstrom konstant gehalten; der Piezo, der die Höhe der Spitze steuert, verkürzt oder dehnt sich so, dass die Entfernung zur Probe stets gleich bleibt. Das Höhenprofil wird hier aus den Anpassungen der Entfernung berechnet. 2| Hauptteil Unser Rastertunnelmikroskop wollten wir mit Hilfe eines Bausatzes der Interface Physics Group der Universität Münster bauen. Zu dem Bausatz gehörten der Metallrumpf für das Mikroskop, Piezokristalle zur Steuerung der Messspitze, die Steuerungselektronik sowie eine ISA-Karte als Schnittstelle zum Computer mit dazugehöriger Software. Allerdings war das Ein Rastertunnelmikroskop im Eigenbau 5 Projekt „Schüler-STM“ bereits eingestellt, sodass wir nur noch den Metallrumpf und die Piezokristalle bekommen konnten. Alle übrigen Teile mussten wir einzeln kaufen, teilweise auch selbst herstellen. Besonders großen Aufwand bereitete und hierbei die Steuerungselektronik der Messspitze. Wir orientierten uns beim Nachbau zunächst an den Plänen der Universität Münster, nahmen dann aber aufgrund nicht Abb. 2 Das Rastertunnelmikroskop mehr verfügbarer Bauteile einige Änderungen vor. Ursprünglich war vorgesehen das Mikroskop mittels ISA-Karte an einen Computer anzuschließen. Da aber heute kaum noch ein Computer über den benötigten ISA-Slot verfügt, haben wir anstelle der ISA-Karte ein USB-Interface entwickelt. Zudem haben wir dafür eine eigene Software programmiert. Im Folgenden werden die einzelnen Elemente unseres Mikroskops genauer vorgestellt, wobei aus Platzgründen auf viele Details verzichtet werden muss. 2.1| Die Mess- und Steuerungselektronik des Rastertunnelmikroskops Die Mess- und Steuerelektronik ist gewissermaßen das Herzstück unserer Arbeit. Sie steuert die x- und y-Piezos zum Abrastern der Probe, den z-Piezo, der die Höhe der Messspitze reguliert, verarbeitet den gemessenen Tunnelstrom und leitet die Messwerte weiter an das USB-Interface. Die Elektronik des Rastertunnelmikroskops lässt sich anhand ihrer jeweiligen Funktion unterteilen. Im Folgenden werden die einzelnen Teile der Steuerung beschrieben, die sich auf der Hautplatine bzw. der Vorverstärkerplatine befinden. 2.1.1| Stromversorgung Abb. 3 Die Platinen der Steuerungselektronik Von der USB-Platine wird die gesamte Steuerungselektronik mit einer Gleichspannung von +15 V und –15 V versorgt. Auf der Hauptplatine wird dies mittels Spannungsregulatoren zu ±12 V geregelt. Zudem sind Kondensatoren zur Abpufferung von Spannungsschwankungen verbaut. Ein Rastertunnelmikroskop im Eigenbau 6 2.1.2| Spannungsversorgung für die Piezokristalle zum Scannen in x- und y-Richtung Die x- und y-Piezos, die zum Abrastern der Probe dienen, werden von der Software gesteuert. Das entsprechende Signal kommt über die USB-Platine zur Hauptplatine. Diese Signale können nur minimale Leistung liefern. Daher findet zunächst eine Lastentkopplung durch Operationsverstärker (OPA) statt. An deren Eingängen befinden sich Feldeffekttransistoren, sodass dort praktisch kein Strom fließen muss. 2.1.3| Sample Bias Um die für den Tunneleffekt notwendige Potentialdifferenz zwischen der Messspitze und der Probe zu erreichen, wird an die Probe eine Spannung angelegt, während die Spitze am Vorverstärker für den Tunnelstrom angeschlossen ist und Massepotential hat. Die Probenspannung wird über ein Potentiometer eingestellt, das sich am Gehäuse der Hauptplatine befindet. Zudem findet auch hier eine Lastentkopplung durch einen OPA statt, da das Potentiometer einem Spannungsteiler entspricht und sich die Probenspannung somit unter Last ändern würde. 2.1.4| Vorverstärker für den Tunnelstrom Der Vorverstärker hat die Aufgabe, den sehr schwachen Tunnelstrom (üblicherweise einige Nanoampere) zu verstärken und in eine Spannung umzuwandeln, da diese weniger störanfällig ist und somit einfacher übermittelt werden kann. Er befindet sich sehr nahe an der Messspitze, um die Störanfälligkeit zu verringern, da der Tunnelstrom bis zum Vorverstärker noch unverstärkt vorliegt und dort somit am empfindlichsten gegenüber elektrischen Feldern ist. Im Folgenden eine kurze Beschreibung seiner Funktion: Der Tunnelstrom, der an der Messspitze abgegriffen wird, geht an den Operationsverstärker IC3 (siehe Schaltpläne). Dieser Operationsverstärker, ein AD795, benötigt nur einen sehr geringen Eingangsstrom, was notwendig ist, um derart schwache Ströme überhaupt verstärken zu können. Des Weiteren bietet er sehr geringe Rauschwerte, verstärkt das Signal also quasi Abb. 4 Der Vorverstärker störungsfrei. Die Verstärkung ist gesteuert durch eine zweigeteilte Rückkopplung. Der erste Teil besteht aus einem vor den OPA geschalteten Widerstand und einem zu ihm parallel geschalteten. Ein Rastertunnelmikroskop im Eigenbau 7 Durch diese sog. Gegenkopplung wird die Spannung um den Faktor − Rparallel Rvor verstärkt. Allerdings steht anstelle des Widerstands vor dem OPA der Abstand zwischen Probe und Spitze: Durch die angelegte Spannung U Bias fließt zwischen Probe und Spitze der kleine Tunnelstrom IT . Somit kann der Abstand zwischen ihnen als Widerstand RT behandelt werden, der den Wert RT = geschalteten Widerstand U Bias hat. Daraus ergibt sich, zusammen mit dem parallel IT RN , aus dem ersten Teil der Rückkopplung folgende Ausgangsspannung für den Verstärker: Ua = − RN R ⋅ U Bias = − N ⋅ U Bias = − RN ⋅ IT U Bias RT IT Die Ausgangsspannung ist also wie gewünscht linear zum Tunnelstrom. Der zweite Teil der Rückkopplung ist ein Spannungsteiler. Der erste Teil ist nicht wie in einer einfachen Verstärkerschaltung zwischen Eingangs- und Ausgangsspannung des OPA geschaltet, sondern zwischen Eingangsspannung und einem durch den Spannungsteiler bestimmten Teil der Ausgangsspannung. Dieser besteht aus einem18 kΩ (R20) und einem 2kΩ (R16) Widerstand, die zwischen den Ausgang des OPA und Masse geschaltet sind. Zwischen den beiden Widerständen ist der zum OPA parallel geschaltete Widerstand des ersten Teils der Rückkopplung angeschlossen. An ihm liegt also eine Spannung von R16 1 ⋅ U a = ⋅ U a gegenüber Masse an. R16 + R20 10 Da eine Rückkopplung Ua stets auf einen bestimmten Wert in Abhängigkeit zur Eingangsspannung U e einstellt, sorgt der erste Teil der Rückkopplung nun also dafür, dass 1 10 U a den durch die Rückkopplung definierten Wert in Abhängigkeit zu U e erhält. Somit ergibt sich für die Ausgangsspannung folgendes: U a = −10 ⋅ RN ⋅ IT Der Widerstand RN hat 100MΩ. Dadurch ergibt sich, dass ein nA Tunnelstrom in –1 V Spannung umgewandelt wird. Ein Rastertunnelmikroskop im Eigenbau 8 2.1.5| Z-Control Z-Control ist die Steuereinheit für den z-Piezo. Das Signal des Tunnelstroms kommt hier zunächst vom Vorverstärker an die Hauptplatine. Im constant-height-Modus wird das Signal direkt als Messwert an das USB-Interface weitergegeben. Im constant-current-Modus prüft ein elektronischer Regelkreis ständig die Position des Piezos und passt diese gegebenenfalls an. Anhand eines Potentiometers wird der Sollwert des Tunnelstroms eingestellt und die Messspitze mit dem z-Piezo durch einen Regelkreis automatisch nachgeführt. In den Regelkreis werden dazu aktueller Wert und Sollwert hineingegeben. Daraus wird die Differenz gebildet und anhand dieser vom Regler der Stellwert ermittelt, also in diesem Fall der Wert, um den die Auslenkung des z-Piezos verändert werden muss. Die Änderung wird entsprechend des Stellwertes vorgenommen und die Strecke wird durchlaufen, was hier der Messung des nächsten Rasterpunkts entspricht. Der dort ermittelte aktuelle Wert wird wieder in den Regelkreis gegeben. Den Kern des Regelkreises bildet dabei eine Schaltung, die über die Differenz zwischen dem Sollwert und dem aktuellen Tunnelstrom integriert. Ihr Ausgangssignal steuert den z-Piezo und wird gleichzeitig als Messwert an das USB-Interface weitergegeben. Außerdem werden über die Ausgangsspannung des Integrators auch noch zwei LED gesteuert, die als Hilfe zur mechanischen Annäherung der Spitze an die Probe dienen. Eine grüne LED ist so geschaltet, dass sie leuchtet, wenn der z-Piezo zusammengezogen ist, eine rote so, dass sie leuchtet, wenn der z-Piezo ausgedehnt ist. Wenn beide LED aus sind, dann hat die Spitze ohne Ausdehnung des Piezokristalls den gewünschten Abstand zur Probe und man kann beginnen zu messen. Ein Rastertunnelmikroskop im Eigenbau 9 2.2| USB-Interface 2.2.1| Aufbau und Aufgabenbereich der USB-Platine Die USB-Platine hat als Schnittstelle zum Computer die Aufgabe, die analogen Signale der Steuerungselektronik in digitale Signale umzuwandeln und an den PC weiterzugeben sowie die digitalen Signale der Software in analoge umzuwandeln und diese an die Steuerungselektronik weiterzuleiten. Von der Universität Münster war dafür eine ISA-Karte mit Integrierten Digital-Analog- und Analog-Digital-Wandlern (DAC und ADC) vorgesehen. Sie konnte jedoch nicht mehr geliefert werden und eine anderweitige Beschaffung wäre sehr teuer gewesen. Zudem besitzen moderne Computer in der Regel keinen ISA-Slot mehr, sodass man fest an einen einzigen älteren Rechner gebunden gewesen wäre. Wir entschieden uns daher für den heute üblichen Universal Serial Bus. USB-Anschlüsse sind an jedem Computer verfügbar, es gibt kaum eine komfortablere Möglichkeit Geräte mit dem Rechner zu verbinden. Desto mehr wir uns jedoch mit dem Universal Serial Bus beschäftigten, desto komplizierter erschien er. Das Konzept des USB ist relativ einfach und auch die hardwareseitige Realisierung ist ein geringes Problem. Das eigentliche Problem ist das Ansprechen des USB in den heutigen Betriebssystemen. Bei Windows-Systemen kommt man nicht um das Entwickeln eines eigenen USB-Treibers herum – ein schwieriges Unterfangen. Nach längeren Recherchen fanden wir einen Hinweis auf einen fertigen USB-Controller von der Firma Codemercs. Es handelt sich dabei um einen universell einsetzbaren Microcontroller (namens IO-Warrior56) mit allerlei Anschlussmöglichkeiten, wie zum Beispiel einem Abb. 5 Die USB-Platine I2C-Bus und einer SPI-Schnittstelle. Das besondere an diesem Chipsatz ist, dass es sich dabei um ein USB-Gerät der HID (Human Interface Devices) – Klasse handelt. Windows erkennt jede Art von HID-Geräten ohne dafür einen Treiber zu benötigen und bietet somit perfekte Plug&Play-Kompatibilität. Das Ansprechen des Microcontrollers erfolgt über von der Firma mitgelieferte Funktionen die sich in einer DLL (dynamic link library) befinden. Einziger Nachteil ist die Begrenzung der Ein Rastertunnelmikroskop im Eigenbau 10 HID-Geräte-Operationen auf die USB-Polling-Rate1 von 1000 Hz. Effektiv kann man also im besten Fall nur 1000 mal pro Sekunde auf den USB-Chipsatz zugreifen, was für unsere Zwecke schon relativ langsam ist, der Messgenauigkeit der Hauptplatine aber zugutekommt (da diese mehr Zeit hat die korrekte Nachführung des z-Piezos auszuführen). Die USB-Platine besteht aus dem fertig programmierten Microcontroller und vielen Anschlussmöglichkeiten an den jeweiligen Pins des Controllers. Die Bauteile werden im Starterkit komplett als Bausatz geliefert und müssen nur noch eingelötet werden. Neben den Anschlussleisten befindet sich aber noch ein großzügig bemessenes Breadboard auf der USB-Platine. Auf diese Lochrasterplatine haben wir Referenzspannungsquellen (die für die genaue Ausgabe der analogen Spannungen durch die DAC unabdingbar sind) und die DAC- und ADC- Schaltung gelötet. Außerdem haben wir uns dazu entschieden, die Stromversorgung der gesamten Elektronik über die USB-Platine zu realisieren. Dazu verwenden wir ein einfaches 15V Schaltnetzteil, große Pufferkondensatoren zur Stabilisierung der Spannungsversorgung sowie einen invertierenden DC-DC-Konverter um zusätzlich die benötigten -15V zu erhalten. Durch dieses Bauteil können wir auf das normalerweise erforderliche Labornetzteil verzichten und haben gleichzeitig alle Erdungen miteinander verbunden (gefährliche Potentialdifferenzen zwischen analog- und digital-Ground werden somit ausgeschlossen) 2.2.2| Umsetzung des Auslesens und der Ansteuerung der Mikroskopelektronik durch ADCs und DACs Die Wandlerelektronik wird mit dem USB-Controller über serielle Datenleitungen angesteuert und bietet dadurch ein übersichtliches Schaltungs-Design. Der DAC setzt dabei auf SPI2, der ADC nutzt den I2C3-Bus. In unserer Schaltung haben wir uns für einen 12-bit DAC mit 2 Kanälen sowie einem 12-bit ADC mit 8 Kanälen entschieden. Neben dem Argument, dass jede höhere Auflösung auch ein deutlich besseres Rauschdesign (das sich mit unseren Mitteln nicht realisieren lässt) und somit eine deutlich bessere Vorverstärkerelektronik vorausgesetzt hätte, hat für uns auch die Bauteilgröße eine entscheidende Rolle gespielt. Nachdem wir bereits für die Hauptelektronik einiges hatten 1 Die USB-Polling-Rate bezeichnet die maximale Frequenz der Abfragen, die ein HID-Gerät nutzen kann. Eingeführt wurde die USB-Polling-Rate um die anderen USB-Geräte nicht zu sehr durch zum Beispiel unnötig oft abtastende Mäuse in der Geschwindigkeit zu beeinträchtigen. 2 SPI = Serial Peripheral Interface 3 I2C = Inter Integrated Circuit Ein Rastertunnelmikroskop im Eigenbau 11 ausgeben müssen, sollte die ADC- und DAC-Elektronik auf der Lochrasterplatine des USBInterface untergebracht werden um Kosten einzusparen. Aus diesem Grund waren nur DIP4Bauteile geeignet, wenn auf schlecht lieferbare und störungsverursachende Soic5-Adapter verzichtet werden sollte. In dieser Bauform gibt es leider keine Wandler mit mehr als 12 bit. Die beiden DAC bekommen vom Computer die Signale zur Steuerung der x- und y-Piezos zur horizontalen Ausrichtung der Messspitze, wandeln sie in analoge Spannungen um und geben sie an die Hauptplatine weiter. Die Messelektronik gibt daraufhin den neuen Höhenmesswert als analoge Spannung zurück. Der ADC wandelt diese Spannung wieder in einen digitalen Wert um, der über den USB-Controller an den Computer übermittelt wird. Sobald der Computer den Messwert erfasst und gespeichert hat, verändert er erneut die Spitzenposition und scannt die Probe so punktweise auf der in der Software eingestellten Fläche mit der gewählten Genauigkeit. 2.3| Software Die Software komplett selbst konzipiert und im Microsoft Visual Studio.Net 2005 entwickelt. Dabei haben wir uns für C++ als Sprache entschieden. Sie ist die mächtigste Programmiersprache und in Verbindung mit dem .Net Framework auch sehr komfortabel zu benutzen. 2.3.1| Bedienung der Software Die Software ist so aufgebaut, dass sie auch ohne umfangreiche Vorkenntnisse leicht zu bedienen ist. Dazu ist sie an allen Stellen, an denen das möglich ist, vollautomatisiert, bietet aber auch die Möglichkeit alle Einstellungen manuell vorzunehmen. Der Aufbau ist wie folgt gestaltet: Das Hauptfenster besteht im Wesentlichen aus einer Menü-Leiste und Abb. 6 Screenshot (simuliertes Bild) der Software der Anzeige der aktuellen Scanergebnisse. Während eines Scanvorgangs befindet sich das Programm immer im 2-dimensionalen Anzeigemodus. Diese 2D-Ansicht wird während des Einscannens 40 Mal pro Sekunde 4 5 Eine Übersicht über typische Gehäuseformen finden Sie im Anhang Siehe Fußnote 4 Ein Rastertunnelmikroskop im Eigenbau 12 aktualisiert und zeigt somit stets den tatsächlichen Scanfortschritt an. Das Scanergebnis wird in einem XY-Koordinatensystem angezeigt, indem die Höhen durch Grauwerte dargestellt werden. Fährt man mit dem Mauszeiger über die eingescannte Oberfläche, wird die jeweilige Position auf der Probe sowie die dortige Höhe in Nanometern angezeigt. Als Nullpunkt dient dabei der erste Messwert. Direkt nach dem Einscannen gibt das Programm dem Anwender die Möglichkeit, die 3dimensionale Ansicht „entwickeln“ zu lassen. Dazu öffnet sich bei Zustimmung des Benutzers ein weiteres Programm, das automatisch das 3D-Bild erzeugt und sich anschließend selbstständig wieder schließt. Hier sind die Höhenunterschiede zusätzlich durch frei wählbare Farben verdeutlicht. Genauso kann auf Wunsch ein weiteres 3D-Bild erzeugt werden, eine Steilansicht des Scans, die bei sehr unebenen Proben benötigt wird. Außerdem bietet das Programm eine 360°-Ansicht. Das Berechnen dieser Ansicht ist jedoch sehr zeitintensiv und so sollte man sich, je nach Rechengeschwindigkeit des Computers, auf 10 bis 20 Minuten einstellen. In dieser Ansicht kann man mit einem Schieberegler das Bild von allen Seiten betrachten. Die Bilder lassen sich in anschließend in unterschiedliche Formate exportieren. Außerdem speichert die Software alle erzeugten Bilder zusammen mit den Einstellungen bei der jeweiligen Messung in eigenen Dateiformaten während des Ansehens und Einscannens kontinuierlich im Arbeitsverzeichnis6 des Computers ab. Diese Daten können auf Wunsch in Form eines 7z-Archives (eine besonders gut komprimierte ZIP-Datei) an beliebigem Ort gespeichert werden. In entsprechenden Einstellungsdialogen kann man zudem die Größe des Scanbereichs sowie die Auflösung des Scans einstellen. Maximal kann mit einer Auflösung von 0,1 Nanometer auf einem Bereich von 720x720 Nanometern gescannt werden. Außerdem kann man die Auflösung der 3D-Bilder und ihre Farbgebung einstellen. Neben den eigentlichen Funktionen zum Scannen von Proben beinhaltet die Software einige weitere Tools: Einen AD-/DA-Wandlertest, eine Anzeige für den aktuellen Tunnelstrom, und Windows-Systemtunings. Letzteres ist zur reibungslosen Ausführung der Anwendung gedacht und verbessert einige Einstellungen von Windows im Punkt Systemstabilität und Systemgeschwindigkeit. Alle hier angebrachten Tunings basieren auf der Anpassung von 6 Das Arbeitsverzeichnis ist unter Windows XP z.B. „C:\Dokumente und Einstellungen\Hauptaccount \Anwendungsdaten\CBPS\STM\1.0.0.0“ einzusehen Ein Rastertunnelmikroskop im Eigenbau 13 Registry-Werten an die Computer-Hardware. Sie erhöhen unter Anderem die Geschwindigkeit der Arbeitsspeicherabfragen, die für den Scanvorgang und das Rendern der 3D-Ansicht von hoher Bedeutung sind. 2.3.2| Der Scanvorgang Der Scanvorgang selbst läuft wie folgt ab: Die auf dem Bild horizontalen Piezos (Piezostacks sind grün ummantelt) werden von der Software mit Hilfe von Spannungen der DAC schrittweise zum Ausdehnen / Zusammenziehen gebracht. Dadurch verändert sich die XY-Position der Tunnelspitze. Nach jeder Positionsänderung wird der aktuelle Spannungsmesswert erfasst und von der Software Abb. 7 Die Scaneinheit automatisch in einen Höhenmesswert umgerechnet. Der Höhenmesswert wird in einem Array7 gespeichert und zur weiteren Verarbeitung (wie zum Beispiel der GraphicEngine8) bereitgestellt 2.3.3| Visualisierungsprozess der Messergebnisse Die Visualisierung der Messergebnisse findet während des Scanvorgangs kontinuierlich alle 25 Millisekunden statt. Der Anwender erhält so stets ein aktuelles Bild seiner Probe. Die Software rechnet hierfür die Messergebnisse in Graustufenwerte um und zeichnet den jeweiligen Graustufenwert als einen Punkt in ein 2-dimensionales Koordinatensystem. Dieses Koordinatensystem wird dann als Bild angezeigt. Ist die Scanauflösung kleiner als 500 auf 500 Messpunkte, so interpoliert das von uns programmierte bildgebende Verfahren die zu zeichnenden Punkte automatisch mit einem von Microsoft bereitgestellten hochqualitativen bikubischen Interpolationsalgorithmus. Bei der 3D-Visualisierung verlaufen dadurch die Strukturen „weicher“ und sehen natürlicher aus. Die Interpolation beeinflusst die Messwerte, die angezeigt werden wenn man mit der Maus über das Bild fährt absichtlich nicht. Während die 2-dimensionale Bildgebung noch relativ einfach strukturiert ist, ist die 3dimensionale Visualisierung schon deutlich anspruchsvoller. Hier haben wir auf einen bereits 7 8 Ein Array ist eine „Ansammlung“ von Variablen eines bestimmten Typs, also eine Kette von zum Beispiel Messwerten GraphicEngine: darunter versteht man den Softwarebaustein, der aus den Messwerten ein Bild erzeugt Ein Rastertunnelmikroskop im Eigenbau 14 bestehenden OpenSource-Renderer9 namens PovRay gesetzt. Er wird in vielen heutigen 3DProgrammen genutzt und gilt als einer der hochqualitativsten Renderer, der bei korrekten Materialvorgaben auch durchaus photorealistisches Rendern ermöglicht. Für die 360°-Ansicht werden 75 3D-Bilder aus unterschiedlichen Blickwinkeln gerendert und anschließend die Zwischenschritte interpoliert. 2.4| Voraussetzungen für den Betrieb des Mikroskop Voraussetzung zum Betrieb des Mikroskops ist eine Stromversorgung mit 15V Gleichstrom über ein Schaltnetzteil. Zudem benötigt das USB-Interface einen USB 2.0 Port mit einer Stromabgabe von bis zu 500mA. Sollte dieser Strom mit der computereigenen Hardware nicht erreicht werden können kann ein günstig zu erwerbendes USB-HUB mit externer Stromversorgung verwendet werden. Die Vorraussetzungen für die Software: • Eine CPU mit mindestens 1 Ghz (ansonsten dauert der Bildaufbau sehr lange) • mindestens 512 MB Arbeitsspeicher (ansonsten kommt es zu einer erheblichen Verzögerung beim Rendern10 der 3D-Ansicht) • Mindestens 200 MB freier Festplattenspeicher • Betriebssystem: Windows XP, Windows Vista oder höher • Softwarevoraussetzungen: Microsoft .Net Framework 2.0 sowie POV-Ray 3.6 • Eine USB-Polling-Rate von mindestens 1000 Hz (standardmäßig in Windows XP, Vista und Windows 7 voreingestellt) Somit lässt sich das Mikroskop an nahezu jedem Computer mit Windows Betriebssystem ab XP betreiben. Darüber hinaus sind für gute Ergebnisse zwei Punkte zu beachten: Zunächst muss das Mikroskop gut gegen Schwingungen gedämpft werden (Trittschall, Gebäudeschwingungen etc.). Dazu stellen wir unseren Aufbau auf schwere Platten, Abb. 8 Die Elektronik Festplattengehäusen 9 in umgebauten unter die als Pufferung Schläuche von OpenSource Software ist Software deren Quelltext (Programmcode) frei verfügbar ist und den eigenen Bedürfnissen angepasst werden kann 10 Rendern: Berechnen eines Bildes, beruhend auf mathematischen Instruktionen Ein Rastertunnelmikroskop im Eigenbau 15 Schubkarrenreifen gelegt werden. Weiterhin muss für eine gute elektrische Abschirmung gesorgt werden, da ansonsten leicht Störungen durch äußere Einflüsse auftreten (Lampen, DECT-Telefone etc.). Optimal ist es, alle Platinen einzeln abzuschirmen (und somit auch gegeneinander) und dabei alle Abschirmungen auf den gleichen Ground-Kanal zu setzen. Deshalb befinden sich unsere Platinen alle in umgebauten Festplattengehäusen. Zudem wird das gesamte Mikroskop durch einen geerdeten Metallkasten abgeschirmt. Abb. 9 Aufnahme einer Goldoberfläche im constant-current-Modus Abb. 10 Aufnahme einer Goldoberfläche im constant-height-Modus Ein Rastertunnelmikroskop im Eigenbau 16 3| Verbesserungsmöglichkeiten • Das USB-Interface könnte durch einen schnellen und gut programmierten USBMicrocontroller ersetzt werden und als vollwertiges USB 2.0-Gerät fungieren • Statt einen Raytraycer einzusetzen könnte man eine eigene DirectX-Applikation schreiben um die 3D-Anzeige in Echtzeit aufbauen zu können und auch jeden beliebigen Steilwinkel anzeigen zu lassen (Bewegung des Blickwinkels durch Mauszeigerbewegungen). • Optimierung der 2D-Anzeige während des Scanvorgangs (zur Zeit sehr rechenintensiv, da alle 25ms ein neues Bild aufgebaut wird, statt einfach das vorhandene Bild weiter zu zeichnen) Auf elektronischer Ebene können noch Verbesserungen in der Schaltungselektronik angebracht werden. So könnten z.B. einige Bauteile durch SMD-Bauteile ersetzt werden um so die Störanfälligkeit weiter zu senken. Darüber hinaus könnten einige Kalibrierungselemente die derzeit über handelsübliche, manuelle Potentiometer bedient werden, durch digitale Potentiometer ersetzt werden, so dass die Software die Kalibrierung automatisch vornehmen kann. Zurzeit erfolgt die grobe Annäherung per Hand mittels Feintriebschrauben. Geplant und teilweise realisiert ist eine Schrittmotorsteuerung, die eine automatische und genauere Grobannäherung durch die Software ermöglicht. Dadurch lässt sich gleichzeitig auch die Auflösung steigern, da man in geringerem Abstand zur Probe messen kann. Bei der Entwicklung dieser Schrittmotorsteuerung kam es jedoch wiederholt zu Komplikationen zum Beispiel durch defekte Platinen sowie schiefe Feintriebschrauben. Ein Rastertunnelmikroskop im Eigenbau 17 4| Quellenverzeichnis 4.1| Literatur Tietze, Ulrich und Schenk, Christoph; Halbleiter-Schaltungstechnik, 9. Auflage, SpringerVerlag, 1989 Meschede, Dieter (Hrsg.); Gerthsen Physik, 23. Auflage, Springer-Verlag, 2006 4.2| Internetquellen Interface Physics Group der Westfälischen Wilhelms-Universität Münster: http://sxm4.uni-muenster.de/stm%2Dde/, 8.05.08 Lehrstuhl für Festkörperphysik, Institut für Angewandte Physik, Universität ErlangenNürnberg: http://www.fkp.uni-erlangen.de/methoden/stmtutor/stmpage.html, 03.01.05 Dr. Roger M. Nix, School of Biological & Chemical Sciences Queen Mary, University of London: An Introduction to Surface Chemistry: http://www.chem.qmul.ac.uk/surfaces/scc/scat7_6.htm, 26.05.09