Finite Elemente I - TU Bergakademie Freiberg
Werbung

Institut für Numerische Mathematik und Optimierung
Finite Elemente I
Sommersemester 2006
Hörerkreis: 6. Mm, 8. Mm, 6. EC-II, 8. EC-II, 6. EC-WEG, 8. EC-WEG,
6. GIn
PD Dr. Oliver Ernst
1
Finite Elemente I
Hinweis:
In dieser Vorlesung werden die praktischen Aspekte der Finiten Element
Methode in den Vordergrund gestellt, um neben Mathematikern auch Ingenieure anzusprechen.
Die mathematische Analyse dieser Methode ist Gegenstand einer separaten Vorlesung im Wintersemester 2004/05.
TU Bergakademie Freiberg, SoS 2006
2
Finite Elemente I
1
1.1
Einleitung
Grundlegendes
Die Finite Element Methode (FEM) bezeichnet eine große Klasse numerischer Verfahren zur Lösung partieller Differentialgleichungen. Andere
gebräuchliche Verfahrensklassen hierfür sind
• Finite Differenzen,
• Finite Volumen,
• Spektralverfahren,
• Kollokationsverfahren,
• Randelementverfahren.
1 Einleitung
TU Bergakademie Freiberg, SoS 2006
3
Finite Elemente I
Vorteile der FEM:
Geometrische Flexibilität: Die Anpassung an komplizierte Geometrien
wird in die Gittererzeugung verlagert, das grundlegende Verfahren ist
davon unabhängig.
Mathematisches Fundament: Es existiert eine umfassende und ausgereifte mathematische Konvergenztheorie, mittels derer Konvergenzrate,
Fehlerschätzer etc. analysiert werden können.
Weite Verbreitung: Es existieren inzwischen sehr viele Softwarepakete
hoher Qualität, in denen die FEM realisiert ist, etwa MSC Nastran,
Ansys, ABAQUS, STRESS CHECK neben vielen anderen.
1.1 Grundlegendes
TU Bergakademie Freiberg, SoS 2006
4
Finite Elemente I
1.2
Geschichtliches
Schellbach, 1852. Lösung eines Minimalflächenproblems mit für eine
FEM typischen Teilschritten.
Ritz, 1909. Minimierung eines quadratischen Funktionals (Energiefunktional) in einem endlichdimensionalen Funktionenraum.
Galerkin, 1915. Lösung einer Randwertaufgabe auf endlichdimensionalem Funktionenraum mittels Variationsformulierung, Methode der ge”
wichteten Residuen“.
Courant, 1943. Verwendete zum ersten Mal Ansatzfunktionen mit kleinem
Träger.
50er Jahre. FEM von Mechanikern neu entdeckt. Zerlegung von Festkörpern
in endlich viele Finite Elemente“, Berechnung der Verschiebungen un”
ter gegebenen Lasten in den Knoten der Finiten Elemente.
60er Jahre. Theoretische Untermauerung der FEM seitens der Mathema1.2 Geschichtliches
TU Bergakademie Freiberg, SoS 2006
5
Finite Elemente I
tik. Computer-Programm NASTRAN wird von der MacNeal-Schwendler
Corporation vermarktet.
1967. Ingenieur-Monographie von Zienkiewicz und Cheung erscheint.
1973. Mathematische Monographie von Strang und Fix erscheint.
1.2 Geschichtliches
TU Bergakademie Freiberg, SoS 2006
6
Finite Elemente I
1.3
1.3.1
Literatur
Mathematische Aspekte
G. Strang und G. Fix. An Analysis of the Finite Element Method. PrenticeHall, Englewood Cliffs, NJ, 1973.
P. Ciarlet. The Finite Element Method for Elliptic Problems. North-Holland,
Amsterdam, 1978.
D. Braess. Finite Elemente – Theorie, schnelle Löser und Anwendungen
in der Elastizitätstheorie. Springer, Berlin-Heidelberg, 1992.
C. Großmann und H.-G. Roos. Numerik partieller Differentialgleichungen. Teubner, Stuttgart, 1992.
S. Brenner und L. Scott. The Mathematical Theory of Finite Element Methods. Springer, New York, 1994.
1.3 Literatur
TU Bergakademie Freiberg, SoS 2006
7
Finite Elemente I
1.3.2
Praktische Aspekte
O. C. Zienkiewicz und R. L. Taylor. The Finite Element Method, Volume
1 and 2. 4th ed., McGraw-Hill, New York, 1989.
T. J. R. Hughes. The Finite Element Method – Linear Static and Dynamic
Finite Element Analysis. Prentice-Hall, Englewood Cliffs, NJ, 1987.
M. Jung und U. Langer. Methode der finiten Elemente für Ingenieure.
Teubner, Stuttgart, 2001.
Die FEM Literatur ist kaum überschaubar, da sehr umfangreich. Diese
Liste enthält neben einigen Klassikern aktuelle Lehrbücher. Umfassendere
Literatursammlungen sind dort zu finden.
1.3 Literatur
TU Bergakademie Freiberg, SoS 2006
8
Finite Elemente I
1.4
Weitere Vorbemerkungen
• Die FEM liefert Näherungslösungen für eine Differentialgleichung, ein
mathematisches Problem.
– letzteres sollte sachgemäß gestellt sein (well-posed);
– letzteres hat nicht notwendig viel mit einem dadurch modellierten
technisch/wissenschaftlichen Phänomen zu tun.
• Adaptive, fehlersteuernde FEM-Verfahren können zumindest den Diskretisierungsfehler zuverlässig begrenzen.
• Andere Fehler-/Unsicherheitsquellen müssen angemessen berücksichtigt werden (z.B. stochastische Differentialgleichungen)
• Selbst das beste Werkzeug muss richtig bedient werden (→ SleijpnerKatastrophe.
1.4 Weitere Vorbemerkungen
TU Bergakademie Freiberg, SoS 2006
9
Finite Elemente I
1.5
Einführendes Beispiel: Fachwerke
Um die ursprüngliche Betrachtungsweise der FEM aus Sicht der Strukturmechanik nicht ganz zu übergehen und auch, weil das rechentechnische
Vorgehen eigentlich dasselbe wie beim modernen Ansatz ist, sei hier als
Beispiel die Berechnung der Kräfte und Verschiebungen eines Fachwerks
angebracht.
In der Mechanik sind Fachwerke Tragwerke, die aus gelenkig miteinander
verbundenen
Stäben
Chapter 2: THE
DIRECTbestehen.
STIFFNESS METHOD I
2–4
member
support
joint
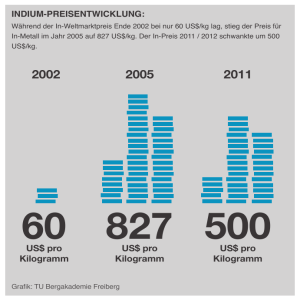
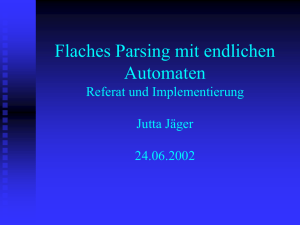
Figure 2.2. An actual plane truss structure. That shown is typical
of a(reales)
roof truss used
in building Fachwerk
construction.
Ein
ebenes
1.5
to illustrate the transition from the hand-calculation methods taught in undergraduate courses, to the
fullyBeispiel:
automated
finite element analysis procedures available in commercial programs.
Einführendes
Fachwerke
TU Bergakademie Freiberg, SoS 2006
In this and the next Chapter we will go over the basic steps of the DSM in a “hand-computer” calcula-
10
Finite Elemente I
Idealisierte Fachwerke
• Fachwerk besteht nur aus Stäben (Elementen) und Knoten.
• Stäbe übertragen Kräfte nur in Richtung ihrer Achse.
• An den Knoten sind die Stäbe durch Universalgelenke reibungsfrei
miteinander verbunden (etwa Drehgelenke in 2D).
• Lasten greifen nur in den Knoten an.
• Auftretende Verschiebungen sind klein, das Material ist linear, d.h.
Kraft-Verschiebung durch Hookesches Gesetz bestimmt.
Trotz dieser Idealisierung können mit diesem Modell Kräfte und Verschiebungen in vielen Fällen hinreichend berechnet werden.
Zu berechnen: Verschiebungen gegenüber unbelastetem Referenzzustand bei gegebenen Randbedingungen und Lasten.
1.5 Einführendes Beispiel: Fachwerke
TU Bergakademie Freiberg, SoS 2006
2–4
hapter 2: THE DIRECT STIFFNESS METHOD I
Finite Elemente I
member
11
Ein Stab ist charakterisiert durch folgendesupport
Eigenschaften:
L : Ljoint
änge
E : Elastizitätsmodul (Materialparameter)
Figure 2.2. An actual plane truss structure. That shown is typical
of a roof truss used in building construction.
A : Querschnittsfläche
illustrate the transition from the hand-calculation methods taught in undergraduate courses, to the
lly automated
finite element analysis procedures
programs.
Nummerierung:
Knotenavailable
1, 2, . .in. ,commercial
Stäbe
(1), (2), . . . .
this and the next Chapter we will go over the basic steps of the DSM in a “hand-computer” calculan mode. This means that although the steps are done by hand, whenever there is a procedural choice
e shall either adopt the way which is better suited towards the computer implementation, or explain
Am i-ten Knoten:
Verschiebungen ui,1 , ui,2implementation
,
Kräfte using
fi,1 , fi,2 .
e difference between hand and computer computations. The actual computer
high-level programming language is presented in Chapter 4.
keep hand computations manageable in detail we use
st about the simplest structure that can be called a
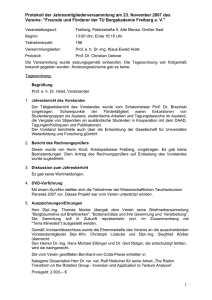
Wir betrachten
zun
ächst
fol- in
ane truss, namely
the three-member
truss
illustrated
gure 2.3. The
idealizedFachwerk
model of the example
truss as a
gendes
bestehend
n-jointed assemblage of bars is shown in Figure 2.4(a),
ausitsdrei
Stäben:
hich also gives
geometric
and material properties. In
s idealization truss members carry only axial loads, have
bending resistance, and are connected by frictionless
ns. Figure 2.4(b) shows idealized support conditions as
ell as the applied point loads applied on truss joints.
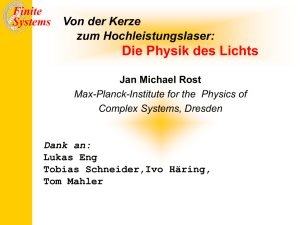
Figure 2.3. The three-member example truss.
1.5 noted
Einführendes
Fachwerke
TU Bergakademie Freiberg, SoS 2006
should be
that Beispiel:
as a practical
structure the example truss is not particularly useful — the one
picted in Figure 2.2 is far more common in construction. But with the example truss we can go over
12
Finite Elemente I
2–5
§2.4
fy3, u y3
(a)
L
E
A
3
√
(3)
(3) (3)
= 10 2
√
= 200 2
1
fy1, u y1
x
(1)
(1)
= 10
E (1) A(1) = 100
L
fx3, u x3
f y3 = 1
(b)
3
f x3 = 2
(2)
(3)
y
fx1, u x1
MEMBERS, JOINTS, FORCES AND DISPLACEMENT
L = 10
E (2) A (2) = 50
(2)
y
fx2, u x2
1
x
2
2
fy2, u y2
Verhältnisse
Stäbe,
Knoten,
Parameter,
Figuream
2.4. Beispielfachwerk.
Pin-jointed idealizationlinks:
of example
truss:
(a) geometric
and
elastic properties,
(b) support
conditions
and applied loads.Last.
Verschiebungen,
Kräfte;
rechts:
Randbedingungen,
§2.4. Members, Joints, Forces and Displacements
The
idealization of the example truss, pictured in Figure 2.4, has three joints,
which are labeled 1
1.5 Einführendes Beispiel: Fachwerke
TU Bergakademie Freiberg, SoS 2006
and 3, and three members, which are labeled (1), (2) and (3). These members connect joints 1–2, 2–
(1)
(2)
(3)
13
Finite Elemente I
Elementgleichungen
Betrachte Referenzelement, d.h. Stab parallel zur x-Achse, Bezeichnungen
b = [b
u
u1,1 , u
b1,2 , u
b2,1 , u
b2,2 ]> ,
fb = [fb1,1 , fb1,2 , fb2,1 , fb2,2 ]> ,
Hookesches Gesetz mit Federkonstante kS , Verschiebung d, Kraft F :
F = kS d,
b , fb :
Zusammenhang mit u
kS =
EA
.
L
F = fb2,1 = −fb1,1 ,
d=u
b2,1 − u
b1,1 .
Insgesamt:
cu
b,
fb = K
1.5 Einführendes Beispiel: Fachwerke
1
EA
c
0
K =
L
−1
0
0 −1 0
0 0 0
0 1 0
0 0 0
TU Bergakademie Freiberg, SoS 2006
14
Finite Elemente I
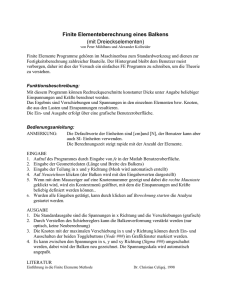
Transformation auf globale Koordinaten
Drehung des Stabes um Winkel ϑ:
" #
" # "
u1
u
b1
c
7→
=
u2
u
b2
−s
#" #
s u1
c
u2
,
c = cos ϑ,
s = sin ϑ.
b = Tu, wobei
Damit transformieren sich die Verschiebungen gemäß u
c s 0 0
−s c 0 0
T =
0 0 c s .
0 0 −s c
Beachte: T ist eine orthogonale Matrix, d.h. T −1 = T > .
1.5 Einführendes Beispiel: Fachwerke
TU Bergakademie Freiberg, SoS 2006
15
Finite Elemente I
2–10
Chapter 2: THE DIRECT STIFFNESS METHOD I
(a) Displacement
transformation
ȳ
ū yi
i
ū y j
ū x j
x̄
u yi
ū xi
(b) Force
transformation
uyj
j
!
fy j
f¯y j
f¯x j
ux j
j
fyi
y
u xi
fx j
x
!
f¯xi
f¯yi
i
fxi
Figure 2.8. The transformation of node displacement and force
components from the local system {x̄, ȳ} to the global system {x, y}.
§2.8.1. Coordinate Transformations
The necessary transformations are easily obtained by inspection of Figure 2.8. For the displacements
1.5 Einführendes Beispiel: Fachwerke
ū xi = u xi c + u yi s,
ū x j = u x j c + u y j s,
ū yi = −u xi s + u yi c,
ū y j = −u x j s + u y j c,
.
(2.12)
TU Bergakademie Freiberg, SoS 2006
where c = cos ϕ, s = sin ϕ and ϕ is the angle formed by x̄ and x, measured positive counterclockwise
16
Finite Elemente I
Transformation der Kräfte: Bei der Transformation muß die (virtuelle)
b erhalten bleiben, d.h.
Arbeit fb · u
b = fb · (Tu) = (T > fb ) · u,
f · u = fb · u
f = T > fb .
⇒
Fazit: Die Verschiebungsgleichung des j-ten Stabes ist gegeben durch
K (j) u (j) = f (j) ,
wobei
K
(j)
= (T
(j) > c(j)
1.5 Einführendes Beispiel: Fachwerke
) K
T
(j)
=
E
(j)
(j)
A
L(j)
2
c
sc
2
sc
s
−c2 −sc
−sc −s2
2
−c
−sc
2
−sc −s
.
2
c
sc
sc
s2
TU Bergakademie Freiberg, SoS 2006
17
Finite Elemente I
Assemblierung
Beim Zusammenfügen der Verschiebungsgleichungen ist zu beachten:
1. Die Verschiebungen aller koinzidenter Knoten stimmen überein.
2. An jedem Knoten stehen die dort angreifenden Kräfte im Gleichgewicht.
Im Beispiel: (Hochgestellte Indices beziehen sich auf Elemente)
(2)
= 0,
+ f1
f2
= u1 ,
u2
= 0,
(1)
(2)
(1)
Knoten 2:
(3)
+ f1
f1
= u1 ,
u1
(1)
(3)
(1)
Knoten 1:
0 1
Knoten 3:
1.5 Einführendes Beispiel: Fachwerke
(2)
u2
=
(3)
u2 ,
(2)
f2
+
(3)
f2
=
B2C
@ A.
1
TU Bergakademie Freiberg, SoS 2006
18
Finite Elemente I
Globale Bezeichnungen:
(1)
(2)
(2)
(3)
u1,2 = u1,2 = u1,2 ,
(1)
(2)
u2,2 = u2,2 = u1,2 ,
(2)
(3)
u3,2 = u2,2 = u2,2 .
u3,1 = u2,1 = u2,1 ,
1.5 Einführendes Beispiel: Fachwerke
(2)
(2)
u2,1 = u2,1 = u1,1 ,
u1,1
u1,2
u
2,1
u =
,
u2,2
u3,1
u3,2
(1)
(1)
u1,1 = u1,1 = u1,1 ,
(1)
f1,1
(1)
f1,2
f (1)
,
f1 = 2,1
(1)
f2,2
0
0
0
0
f (2)
,
f2 = 1,1
(2)
f1,2
(2)
f2,1
(2)
f2,2
(3)
f1,1
(3)
f1,2
0
f3 =
.
0
(3)
f2,1
(3)
f2,2
TU Bergakademie Freiberg, SoS 2006
19
Finite Elemente I
Globale Darstellung der Elementmatrizen:
"
K1 =
K
(1)
O
O
O
#
"
∈R
6×6
,
(3)
k1,1
(3)
k2,1
0
K3 =
0
(3)
k3,1
(3)
k1,2
(3)
k2,2
0
0
0
0
(3)
k1,3
(3)
k2,3
0
0
0
0
0
0
0
0
k3,2
(3)
0
0 k3,3
k4,1
k4,2
(3)
0
0 k4,3
(3)
1.5 Einführendes Beispiel: Fachwerke
(3)
(3)
K2 =
O
O
O
K (2)
#
∈ R6×6 ,
(3)
k1,4
(3)
k2,4
0
,
0
(3)
k3,4
(3)
k4,4
(3)
K (3) = [ki,j ]4i,j=1 .
TU Bergakademie Freiberg, SoS 2006
20
Finite Elemente I
Mit diesen Bezeichnungen lautet das globale Gleichungssystem
Ku = f
mit K = K1 + K2 + K3 und f = f1 + f2 + f3 .
Im Beispiel:
f1,1
20
10 −10 0 −10 −10 u1,1
10
10
0
0 −10 −10 u1,2 f1,2
−10
0
10
0
0
0 u2,1 f2,1
.
=
0
0
0
5
0
−5 u2,2 f2,2
0
0
10
10 u3,1 f3,1
−10 −10
f3,2
u3,2
−10 −10
0
−5 10
15
1.5 Einführendes Beispiel: Fachwerke
TU Bergakademie Freiberg, SoS 2006
21
Finite Elemente I
Randbedingungen
Anhand der Lagerung des Tragwerks ergeben sich die drei Bedingungen
u1,1 = u1,2 = u2,2 = 0,
d.h. nur 3 der 6 Verschiebungen sind Unbekannte.
Wir ordnen die Verschiebungsvariablen um: zuerst die echten“ Unbe”
kannten uI , dann die bekannten Unbekannten“ uII . Nimmt man dieselbe
”
Umordnung der Gleichungen vor, so erhält das LGS die Gestalt
"
#" # " #
KI,I
KI,II
uI
fI
=
,
(1.1)
KII,I KII,II uII
fII
wobei
u2,1
uI = u3,1
,
u3,2
1.5 Einführendes Beispiel: Fachwerke
uII
u1,1
= u1,2
,
u2,2
(fI , fII analog).
TU Bergakademie Freiberg, SoS 2006
22
Finite Elemente I
Der Tatsache, dass der Teilvektor uII bereits feststeht können wir (beispielsweise) dadurch im LGS berücksichtigen, dass wir KII durch die
Einheitsmatrix, den Kopplungsblock KII,I durch Null und fII durch uII
ersetzen:
"
#" # " #
KI,I KI,II
uI
fI
=
.
O
I
uII
uII
Durch Einsetzen von uII in die erste Gleichung erhalten wir das reduzierte
System
KI,I uI = fI − KI,II uII ,
in diesem Fall also
10 0
0
u2,1
0
0 10 10 u3,1 = 2
0 10 15 u3,2
1
1.5 Einführendes Beispiel: Fachwerke
0
mit Lösung uI = 0.4
.
−0.2
TU Bergakademie Freiberg, SoS 2006
23
Finite Elemente I
Post-Processing
Durch Multiplikation des vollständigen Verschiebungsvektors mit der Steifigkeitsmatrix erhält man auch die verbleibenden Gegenkräfte:
−2
20
10 −10 0 −10 −10
0
10
10
0
0 −10 −10 0 −2
−10
0
10
0
0
0 2
0
= .
0
1
0
0
5
0
−5
0
0
0
10
10 0.4 2
−10 −10
1
−10 −10
0
−5 10
15
−0.2
Äquivalent: Berechnung des Blocks fII aus der zweiten (eliminierten)
Matrixgleichung KII,I uI + KII,II uII = fII vom System (1.1).
1.5 Einführendes Beispiel: Fachwerke
TU Bergakademie Freiberg, SoS 2006
This vector recovers the known applied forces (3.14) as can be expected. Furthermore we get three
Finitereaction
Elemente I forces: f x1 = f y1 = −2 and f y2 = 1, which are associated with the support conditions
24
(3.13). It is easy to check that the complete force system is in self equilibrium for the free-free
structure; this is the topic of Exercise 3.1.
§3.4.2. Recovery of Internal Forces and Stresses
Often the structural engineer is not so much interested in displacements as in internal forces and
stresses. These are in fact the most important quantities for preliminary structural design. In pinjointed trusses
the only internal forces
are the
axial member der
forces.
For the
example
truss these
Weiterer
Post-Processing
Schritt:
Berechnung
Axialkr
äfte
in jedem
forces, denoted by F (1) , F (2) and F (3) , are depicted in Figure 3.3. The average axial stress σ e is
Stab.
obtained on dividing F e by the cross-sectional area of the member.
3
The axial force F e in member e can be obtained as
follows. Extract the displacements of member e from
e
. Then
the
complete
displacement
solution
u
to
form
u
Übungsaufgabe: Berechnen Sie
die
e e Axiale
F (3)
recover local joint displacements
from
ū
=
T
u
.
(1)
(2)
(3)
F (2)
spannungen F , F
und F
in den drei
Compute the member elongation d e (relative displaceSt
äben
ment)
andunseres
recover theBeispielfachwerks.
axial force from the equivalent
spring constitutive relation:
d e = ū ex j − ū exi ,
Note that ū eyi and ū ey j
e
1
e
E A e
d .
(3.19)
Le
are not needed in computing d e .
Fe =
F (1)
2
Figure 3.3. The internal forces in the example
truss are the axial forces F (1) , F (2) and F (3) in the
members. Directions shown pertain to tension.
Example 3.1. Recover F (2) in example truss. Member (2) goes from node 2 to node 3 and ϕ (2) = 90◦ .
Extract the global displacements of the member from (3.17): u(2) = [ u x2 u y2 u x3 u y3 ]T = [ 0 0 0.4 0.2 ]T .
Convert to local displacements using ū(2) = T(2) u(2) :
1.5 Einführendes Beispiel: Fachwerke
ū x2
cos 90◦
ū y2
− sin 90◦
=
sin 90◦
cos 90◦
0
0
0
0
◦
◦
Freiberg, SoS 2006
0 1 0 0 TU Bergakademie
0
0
−1 0 0 0 0 0
=
=
.
u x2
u y2