6 MHz Vector Reflektometer Circuit
Werbung

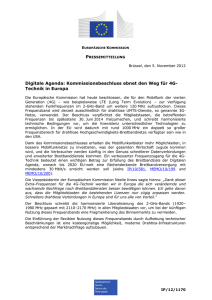
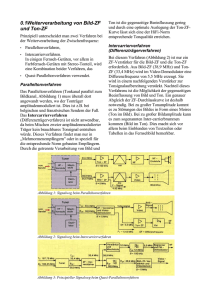
Dokumentation der Projektarbeit 6 MHz Vector Reflektometer Circuit Betreuer: Prof.Dr.-Ing.K.Solbach Fachbereich Hochfrequenztechnik, WS 2009/2010 Verfasser: Mouhammad Nadda Matr.Nr.: 2234323 Universität Duisburg Essen Youssef Saidi Matr.Nr.: 2233845 Universität Duisburg Essen Khaled Rebhi Matr.Nr.: 2221850 Universität Duisburg Essen 6 MHz Vector Reflektometer Circuit Inhaltsverzeichnis 1-Einleitung 2 1.1-Aufgabenstellung 2 1.2-Grundlagen 2 1.2.1-Leitungsgrößen 2 1.2.2-Diskretisierung von Leitungen 3 2-Einzelkomponenten 4 2.1-Layout und Simulation 4 2.1.1-Leistungsteiler 4 2.1.2-90°- Hybrid 5 2.1.3-Richtkoppler 7 2.2-Implementierung 9 2.2.1-Leistungsteiler 10 2.2.2-90°- Hybrid 10 2.2.3-Richtkoppler 11 2.3-Test 12 2.3.1-Leistungsteiler 12 2.3.2-90°- Hybrid 13 2.3.3-Richtkoppler 13 3-Reflektometer 15 3.1-Funktionsweise 15 3.2-PCB-Layout 16 3.3-Implementierung 17 3.4-Test 18 3.4.1-Messaufbau 18 3.4.2-Ergebnisse 19 3.4.3-Fehlerbetrachtung 21 1 6 MHz Vector Reflektometer Circuit 1-Einleitung 1.1-Aufgabenstellung Unsere vom Lehrstuhl Hochfrequenztechnik zugeteilte Projektarbeit bestand im Design, der Implementierung und letztlich dem Test eines bei einer Frequenz von 6 MHz arbeitenden analogen Vektorreflektometers. Dieses Messgerät kann dazu verwendet werden den komplexen Reflektionsfaktor r einer Leitung abzubilden. 1.2-Grundlagen 1.2.1-Leitungskenngrößen Die Spannung bzw. der Strom auf einer verlustfreien Leitung lässt sich als Überlagerung einer hinund rücklaufenden Welle beschreiben. U = UH + UR Abbildung 1: Ströme und Spannungen auf einer Leitung Die hinlaufende Welle wird von einem Generator erzeugt, während die rücklaufende bzw. reflektierte Welle von der Abschlussimpedanz Z2 abhängt. Dabei wird sowohl bei der hin- als auch bei der rücklaufenden Welle das Verhältnis zwischen Strom und Spannung durch die charakteristische Impedanz bzw. dem Wellenwiderstand ZC bestimmt. IH = UH / ZC ; IR = UR / ZC Beim Wellenwiderstand ZC handelt es sich um eine charakteristische Größe einer Leitung, deshalb ist der Wellenwiderstand von der eingespeisten Spannung unabhängig. Für verlustlose Leitungen lässt sich als Näherung eine einfache Formel für den Wellenwiderstand angeben. ZC = √(𝐿/𝐶) Als Hilfsgröße können wir nun den Reflektionsfaktor r als Verhältnis von rück- zu hinlaufender Welle definieren: 2 6 MHz Vector Reflektometer Circuit r ( l ) = UR / UH Somit lässt sich die Spannung an einem Punkt l der Leitung bestimmen durch die Formel U ( l ) = UH * ( 1 + r ( l) ) beschtimmen. Der Reflektionsfaktor am Verbraucher hängt von der Abschlussimpedanz Z2 ab und lässt sich anhand folgender Formel beschreiben: r ( 0 ) = Z2 – ZC / Z2 + ZC . Bei Anpassung, d.h. wenn die Abschlussimpedanz Z2 gleich dem Wellenwiderstand ZC der Leitung ist, wird der Reflektionsfaktor und somit auch die Amplitude der reflektierten Welle UR zu null. 1.2.2-Diskretisierung von Leitungen Eine verlustlose Leitung lässt sich durch eine Ersatzschaltung mit diskreten Elementen, sprich einer Induktivität in Serie und einer parallelen Kapazität in π- oder T- Schaltung realisieren (Abb. 2). Ist der Wellenwiderstand der Leitung bekannt, so lassen sich ganz allgemein die Elemente der Ersatzschaltung nach der Gleichung ZC = √(𝐿/𝐶) bestimmen. Abbildung 2: T- Ersatzschaltbild (l.) und π- Ersatzschaltbild (r.) Ist darüber hinaus auch die Läge der Leitung bekannt, so können für eine festgelegte Frequenz (hier 6 MHz) Werte für die benötigten Spulen und Kondensatoren berechnet werden. Bei den in dieser Projektarbeit verwendeten λ/4 Leitungslängen erhalten wir die einfachen Formeln L = ZC / ω0 und C = (ZC*ω0)-1, wobei ω0 = 2πf0 gilt. Hierbei ist f0 die Frequenz der eingespeisten Spannung und ZC der Wellenwiderstand der Leitung. Diese berechneten Werte gelten für beide Ersatzschaltungen (π- oder T-Schaltung) und somit hängt es an der zu erstellenden Schaltung und den verfügbaren Bauteilen ab, welche der Schaltungen zu präferieren ist. 3 6 MHz Vector Reflektometer Circuit 2-Einzelkomponenten 2.1-Layout und Simulation Bevor mit der Erstellung des Reflektometers begonnen werden konnte, sollten die wichtigsten Komponenten der Gesamtschaltung, sprich Richtkoppler, Leistungsteiler und 90°- Hybrid entworfen und erstellt werden. Dazu erhielten wir das Programm QUCS, mit dessen Hilfe man Schaltungen simulieren und testen kann. 2.1.1-Leistungsteiler Der Wilkinson-Power-Splitter teilt ein eingespeistes Signal in zwei Signale gleicher Amplitude und Phase mit einer Dämpfung von 3dB auf. Hierbei werden λ/4 Leitungen mit einem Wellenwiderstand von 70.7 Ω (für ein 50 Ω System) verwendet, um eine am Eingang angelegte Spannung auf zwei Ausgänge aufzuteilen. Der 100 Ω Widerstand dient der Isolation der beiden Ausgänge im unsymmetrisch belasteten Fall. Abbildung 3: Wilkinson Power Splitter mit λ/4 Leitungen Betrachtet man nun die beiden möglichen Ersatzschaltbilder, so wird deutlich, dass es bei dieser Schaltung sinnvoll ist das π - Ersatzschaltbild zu wählen, da hier die beiden parallelen Kondensatoren am Eingang zu einem Kondensator zusammengefasst werden können, wodurch Bauteile und Platz gespart werden kann. Da parallele Kapazitäten addiert werden, besitzt dieser Kondensator nun den Wert 2*C und ist demnach doppelt so groß wie die beiden anderen Kondensatoren. Abbildung 4: Vereinfachtes Ersatzschaltbild des Power Splitters mit diskreten Bauelementen 4 6 MHz Vector Reflektometer Circuit Dieses vereinfachte Netzwerk kann nun mithilfe von QUCS simuliert werden. Dazu werden die Werte aller Bauelemente, wie zuvor erläutert, berechnet und in die Schaltung eingesetzt. Der nächste Schritt ist eine geeignete Simulationsart zu wählen, um die Wirksamkeit der Schaltung zu prüfen. Abbildung 5: Schaltplan des Leistungsteilers Wir verwendeten eine einfache AC-Simulation mit konstanter Eingangsspannung von 5 V und einer ebenso konstanten Frequenz von 6 MHz, wobei wir eine Spannungsmessung an den beiden Ausgängen vornahmen. Tabelle 1: AC-Simulation des Leistungsteilers Der Phasenunterschied zwischen dem Eingang und den beiden Ausgängen rührt von den λ/4 Leitungen, welche die Phase um 360°/4 = 90° verschieben. Der nicht angepasste Wellenwiderstand von 70.7 Ω sorgt zusätzlich für eine Dämpfung von 3dB, wodurch wir an den Ausgängen eine Spannung von exp[3dB/20]*5V = 3,54V messen. 2.1.2-90°- Hybrid Ein 90°-Hybrid teilt, genau wie ein Powersplitter, das eingespeiste Eingangssignal in zwei Signale mit gleicher Amplitude auf. Der Unterschied zum Powersplitter ist jedoch, dass die beiden Ausgangssignale nicht phasengleich sind, sondern im Idealfall einen Phasenunterschied von genau 90° aufweisen sollten. Abbildung 6: 90°- Hybrid mit λ/4 Leitungen 5 6 MHz Vector Reflektometer Circuit Wie in Abb.3 zu sehen, werden für ein 90°-Hybrid vier λ/4 - Leitungen benötigt. Auch hier erweist es sich, genau wie beim Powersplitter, als vorteilhaft die π - Ersatzschaltung zu verwenden, da man dadurch an jedem Port zwei parallele Kondensatoren zusammenfassen und somit die Gesamtzahl der benötigten Kapazitäten halbieren kann. Abbildung 7: Vereinfachtes Ersatzschaltbild des 90°-Hybrid mit diskreten Bauelementen Wie beim Powersplitter verwendeten wir eine Eingangsspannung von 5 V, um sowohl die Amplitude, als auch die Phase der Spannung an den beiden Ausgängen zu messen: Abbildung 8: Schaltplan des 90°-Hybrid Tabelle 2: AC-Simulation des 90°-Hybrid Anhand der Messergebnisse und Abb. 6 lässt sich das Verhalten der Schaltung erläutern. Voraussetzung für diese Überlegungen ist, dass alle Ports mit 50 Ohm abgeschlossen sind, also keine Reflektion stattfindet. Sowohl am Port 2, als auch am Port 3 kommen zwei Signale an, welche sich überlagern, wobei sie sich nur am Ausgang 2 addieren, während sie am Ausgang 1 entgegen gerichtet sind. Ob die beiden Signale nun entgegen- oder gleichgerichtet sind hängt von ihrer Phase an den beiden Ausgängen ab. Sind die Signale phasengleich so addieren sich diese, haben sie hingegen eine Phasenverschiebung von 180° zueinander, so wird die Amplitude des einen Signals vom anderen subtrahiert. Beim Port 3 erfahren beide Signale eine Phasenverschiebung von 180°, da beide zwei 6 6 MHz Vector Reflektometer Circuit λ/4-Leitungen an Port 2 oder Port 4 vorbei zu Port 3 durchlaufen, wodurch sie zweimal um 90° gedreht werden. Gleichzeitig erhalten beide Signale eine Änderung der Amplitude, da sie Leitungen mit 35,35 Ohm Wellenwiderständen, also nicht angepasste Leitungen durchlaufen müssen. Bei Port 2 erfährt ein Signal durch die λ/4-Leitung von Port 1 zu Port 2 eine Phasenverschiebung um 90°. Das andere Signal muss drei λ/4-Leitungen durchlaufen, erst von Port 1 zu Port 4, dann zu Port 3 und letztlich zu Port 2 und hat demnach eine Phasenverschiebung von 270°. Somit werden die Amplituden dieser Signale von einander subtrahiert, da diese einen Phasenunterschied von 180° = 270° - 90° aufweisen. Weiterhin ließe sich durch Überlegungen am Smith-Chart zeigen, dass 35,35 Ohm und 50 Ohm Wellenwiderstände genau die benötigten Leitungstransformationen bewirken, um die exakt gleichen Amplituden der Spannungen an den beiden Ausgängen zu erhalten. 2.1.3-Richtkoppler Der Richtkoppler wird in diesem Projekt eingesetzt, um eine an einem Ausgang reflektierte Welle zu einem anderen Ausgang zu leiten. Ein Richtkoppler besteht aus zwei λ/4-Leitungen, welche mit sehr kurzem Abstand parallel nebeneinander verlaufen. Durch die elektrischen Felder der Leitungen, werden diese aneinander gekoppelt. Abbildung 9: Richtkoppler mit λ/4 Leitungen Will man jedoch einen Richtkoppler mit diskreten Bauteilen bauen, so muss die Kopplung durch elektrische Felder mithilfe von Kondensatoren erfolgen. Durch diese Kondensatoren lässt sich eine bestimmte Dämpfung nach der Formel CC = 10^(CF/0) / (2*π*f0*Z0) einstellen, wobei CF = - 15dB als Koppelfaktor bezeichnet wird. Abbildung 10: Ersatzschaltbild des Richtkopplers mit diskreten Bauelementen 7 6 MHz Vector Reflektometer Circuit Dieser Koppelwiderstand ist enorm wichtig für die Wirkweise des Richtkopplers. Wird ein sinusförmiges Eingangssignal eingespeist so teilt sich das Signal auf, wobei ein Teil in den Koppelkondensator, während der andere Teil in die λ/4-Leitung fließt. Während das Signal durch den Koppelwiderstand eine Phasenverschiebung Alpha erhält und dann in den Ausgang iso fließt, wird das Signal, welches durch die λ/4-Leitung fließt um 90°-phasenverschoben um sich dann wieder aufzuteilen und zum Teil in den anderen Koppelwiderstand zu fließen. Dieses Signal teilt sich wieder auf, wobei ein Teil wieder durch eine λ/4-Leitung fließt und dann ebenfalls den Ausgang iso erreicht. Somit erhält dieses Signal insgesamt eine Phasenverschiebung von 90° +α + 90°, also 180 ° + α und die beiden Signale am iso-Ausgang addieren sich zu null, da sie einen Phasenunterschied von (180° + α) – α = 180° aufweisen. Durch ähnliche Überlegungen lässt sich zeigen, dass die am Ausgang out reflektierte Welle sich auch in zwei Signale aufteilt, welche jedoch am Ausgang iso in Phase sind und sich somit addieren. Damit ist klar, dass die Spannung am Ausgang nicht von der hinlaufenden Welle vom eingespeisten Signal, sondern von der rücklaufenden Welle, welche von der Last am Ausgang out abhängt, bestimmt wird. Bei der Simulation mit QUCS ließen wir folglich einen Parameterdurchlauf beim Lastwiderstand machen, um zu sehen wie sich die Spannung beim Ausgang iso (Abb.1) bei verschiedenen Widerständen verhält. Abbildung 11: Schaltplan des Richtkopplers Da unsere ersten Messergebnisse nicht zufrieden stellend waren, ließen wir abwechselnd einen Parameterdurchlauf bei den Kondensatoren C1 und C2 und bei den Spulen L1, L2, L3 und L4 durchführen. Dadurch konnten wir immer bessere Ergebnisse, sowohl im Anpassungsfall, als auch bei Belastung mit einem Kurzschluss oder einem Leerlauf erreichen. 8 6 MHz Vector Reflektometer Circuit Abbildung 12: AC-Simulation und Parameterdurchlauf am Messobjekt des Richtkopplers An den Messergebnissen wird deutlich, dass die Spannung am Ausgang iso genau den Reflektionsfaktor abbildet. Bei Anpassung gibt es keine Reflektion und die Spannung ist gleich Null. Bei einem Kurzschluss, also wid = 0 Ohm und bei einem Leerlauf, hier sehr hoher Widerstand, liegt die Amplitude der Spannung nahe bei eins, nur die Winkel sind unterschiedlich. Mit der Gesamtschaltung des Reflektometers sollte es also möglich sein den Reflektionsfaktor zweidimensional, also mit Imaginär- und Realteil, abzubilden. 2.2-Implementierung Anschließend mussten die einzelnen Schaltungen realisiert werden. Dazu verwendeten wir eine einfache Laborplatine. Diese muss erst mit Azetol gesäubert werden, um die Fotopositiv-Schicht abzulösen. Daraufhin mussten die passenden Bauteile gefunden werden, wobei es möglich war durch Parallel- und Reihenschaltung von Kondensatoren oder Spulen, die zuvor berechneten Werte anzunähern. Nachdem alle Bauteile für eine Schaltung gefunden waren, konnte die benötigte Länge der Platine durch Anlegen aller Bauelemente ermittelt und die Platte zurechtgeschnitten werden. Im Anschluss mussten mit Hilfe einer Verbindungstechnik, dem Löten, die Bauteile auf der Platine festgemacht werden. Verbindungstechniken beschreiben die Vielzahl an Mechanismen mit denen elektrische Geräte, Maschinen etc. zusammengesetzt werden können. Im Bereich der Elektrotechnik werden Verbindungstechniken vor allem dazu benötigt, eine elektrische Verbindung zwischen zwei Elektroden herzustellen, wobei zu beachten ist, dass solche Verbindungen immer auch Verluste bedeuten, und je nach Bauelement und Verbindung, die elektrischen Eigenschaften von Schaltungsteilen verändern können. Bei einer Frequenz von 6 MHz sind diese Verluste bzw. Fehler vernachlässigbar. Der Lötkolben, der zum Schmelzen des Zinns gebraucht wird, musste auf eine 9 6 MHz Vector Reflektometer Circuit Temperatur von etwa 360°C bis 370°C erhitzt werden. Sobald der Lötkolben erhitzt war, konnte ein Bauelement an die Platine angelegt und verlötet werden. Dazu musste das Lot, ein Zinndraht, an die Füße des Bauteils gehalten werden und mit dem Lötkolben zum Schmelzen gebracht. Sobald der Lötkolben wieder vom Lot getrennt wird, erstarrt das Zinn und es entsteht eine feste Verbindung zwischen Bauteil und Platine. Zum Schluss wurden SMA-Buchsen als Ein- und Ausgänge der Schaltung an die Enden der Platine gelötet werden und alle Erdpotentiale miteinander verbunden werden. 2.2.1-Leistungsteiler Für den Leistungsteiler verwendeten wir folgende Bauteile: Bauelement Widerstand [Ohm] Induktivität [nH] 1. Kapazität [pF] 2. Kapazität [pF] ideal 100 1875 750 375 verwendet 100 1500 + 330 = 1830 680 + 68 = 748 330 + 47 = 377 Tabelle 3: Bauteile des Leistungsteilers Hierbei ist zu beachten, dass parallele Kapazitäten addiert werden, wohingegen nur Induktivitäten, welche in Reihe geschaltet sind, addiert werden dürfen. Insgesamt konnten wir durch Parallelschaltung von Kapazitäten und in Reiheschalten von Induktivitäten die idealen Werte soweit annähern, dass wir nach der Formel Σ[(Xi- Xv)/Xi]/n, wobei Xi der ideale und Xv der reale Wert für das Bauelement und n die Gesamtzahl der verwendeten Bauelemente ist, eine mittlere prozentuale Abweichung von 0,8% erzielen konnten. Dieser ist nur ein theoretischer Wert, da alle Bauteile eine gewisse Toleranz besitzen und somit nicht dem genauen Wert ihrer Beschriftung entsprechen. Abbildung 13: Leistungsteiler 2.2.2-90°- Hybrid Beim 90°Hybrid verwendeten wir zuerst eine Spule von 1 µH, um eine Induktivität von 928 nH anzunähern. Wir mussten beim Messen jedoch feststellen, dass der daraus resultierende Fehler zu groß war, sodass wir eine 12 µH Spule parallel schalteten, um die Gesamtinduktivität auf etwa 923 nH zu verringern. 10 6 MHz Vector Reflektometer Circuit Bauelement ideal verwendet Kapazität [pF] 1287 1200 1. Induktivität [nH] 1326 1000 + 330 = 1330 2. Induktivität [nH] 928 1000 II 12000 = 923 Tabelle 4: Bauteile des 90°-Hybrid Hier erhalten wir eine mittlere prozentuale Abweichung von 2,53%. Abbildung 14: 90°-Hybrid 2.2.3-Richtkoppler Der Richtkoppler war, wie wir bei der Simulation der Schaltung festgestellt hatten, das empfindlichste aller Bauteile und somit war es wichtig die idealen Werte für die Bauelemente so gut wie möglich anzunähern. Bauelement ideal verwendet Induktivität [nH] 1120 1000 + 100 = 1100 Kapazität [pF] 510 390 + 120 = 510 106.2 100 Koppelkondensator [pF] Tabelle 5: Bauteile des Richtkopplers Beim Richtkoppler erhalten wir somit eine mittlere prozentuale Abweichung von 2,54 %. Abbildung 15: Richtkoppler 11 6 MHz Vector Reflektometer Circuit 2.3-Test Zuletzt mussten alle Schaltungen mit Hilfe eines Funktionsgenerators und eines Oszilloskops als Messgerät getestet werden. Hierbei war zu beachten, dass das Oszilloskop nicht mit 50 Ohm angepasst war, sondern einen Innenwiderstand von 1 MOhm aufwies. Deshalb setzten wir einen 50 Ohm Widerstand parallel zum Eingang des Oszilloskops, um näherungsweise einen Innenwiderstand von 50 Ohm zu erreichen. Abbildung 16: Messaufbau bei allen Einzelkomponenten 2.3.1-Leistungsteiler Wir speisten eine sinusförmige Spannung mit einer Frequenz f = 6 MHz und einer Amplitude von 5 V ein und konnten dann die Spannung an den beiden Ausgänge messen. Uein Out1 Out2 5V 3,42 V 3,40 V Tabelle 6: Messwerte beim Leistungsteiler Wie erwartet ist die Amplitude der Spannung an beiden Ausgängen nahezu identisch und es war am Oszilloskop kein Phasenunterschied zwischen den beiden Spannungen erkennbar. Die Dämpfung der Amplitude entspricht jedoch nicht dem gewünschten Wert von 3 dB, sondern beträgt etwa 10*log(5/3,42) = 3,79 dB, was jedoch wahrscheinlich nicht an der Schaltung liegt, sondern einem Messfehler entspringt. Trotz des parallel geschalteten Widerstandes entspricht der Innenwiderstand des Oszilloskops nicht genau 50 Ohm. Dies wurde sichtbar, als wir den Funktionsgenerator direkt am Oszilloskop anschlossen und statt einer Spannung von 5 V eine Spannung von 4,8 V angezeigt wurde. Da dieser Messfehler nicht behoben werden konnte, alle anderen Ergebnisse jedoch den 12 6 MHz Vector Reflektometer Circuit gewünschten Werten entsprechen, kann die Wirksamkeit der Schaltung als zufriedenstellend bezeichnet werden. 2.3.2-90°- Hybrid Bei dieser Schaltung war es wichtig den nicht benötigten Ausgang mit 50 Ohm abzuschließen, da sonst an diesem Ausgang Reflektion stattfinden und somit die Messungen an den anderen Ausgängen verfälscht würden. Auch hier speisten wir eine Spannung von 5 V ein und erhielten folgende Ergebnisse: Uein Out1 Out2 ф 5V 3,43 V 3,42 V 88° Tabelle 7: Messwerte beim 90°-Hybrid Die Ergebnisse entsprechen den Erwartungswerten, die Amplituden der beiden Ausgangsspannungen sind etwa gleich groß und die Phasendifferenz ф zwischen den beiden Ausgangssignalen liegt nah bei 90°. Auch hier entspricht die Dämpfung nicht 3 dB, was an den schon erwähnten Messfehler liegen sollte. Zum Messen der Phasendifferenz ф zwischen den beiden Signalen, verwendeten wir die Cursor-Funktion des Oszilloskops. Dazu bestimmten wir erst die Länge einer ganzen Welle eines der sinusförmigen Signale, also von einem Maximum zum nächsten, sodass diese Länge 2π bzw. 360° entsprach. Nun konnten wir mit Hilfe der Cursor die Länge zwischen den Hochpunkten der beiden unterschiedlichen Ausgangssignale messen, welche logischerweise der Phasendifferenz zwischen diesen Ausgangssignalen entspricht. Durch einen einfachen Dreisatz lässt sich die Phasendifferenz, welche hier etwa ф = 88° entspricht, bestimmen. Diese Methode ist jedoch sehr ungenau und kann uns somit keine exakten Ergebnisse, sondern nur einen qualitativen Eindruck liefern. 2.3.3-Richtkoppler Der Richtkoppler musste gleich mehrere Anforderungen erfüllen. Die Schaltung sollte sowohl beim Kurzschluss-, Leerlauf- und Anpassungsfall zufriedenstellende Ergebnisse liefern. Wir speisten also wieder eine Spannung von 5 V ein, variierten den Widerstand am Ausgang Out und beobachteten die Signale, die am Iso-Ausgang zu sehen waren. Widerstand Iso Leerlauf 840 mV Kurzschluss 896 mV 50 Ohm 40 mV Tabelle 8: Messwerte beim Richtkoppler 13 6 MHz Vector Reflektometer Circuit Die Spannung ist beim Leerlauf- bzw. Kurzschlussfall etwa 20-mal größer als bei Anpassung und somit stellt dies eine hinreichend große Differenz der Spannung zwischen den Fällen in denen der Reflektionsfaktor r = 1 und in dem r = 0 sein sollte. Der kleine Spannungsunterschied zwischen Leerlauf- und Kurzschlussfall wird wahrscheinlich dadurch verursacht, dass ein Teil der Eingangsspannung, vielleicht aufgrund kleiner Asymmetrien in der Schaltung, doch in den Iso-Port fließt und je nach Phasenwinkel zum reflektierten Signal addiert oder subtrahiert wird. 14 6 MHz Vector Reflektometer Circuit 3-Reflektometer 3.1-Funktionsweise Aus allen Einzelschaltungen konnte nun die Reflektometerschaltung, wie in Abb. 17 dargestellt, zusammengesetzt werden: Abbildung 17: Schaltplan des Vector Reflektometers Wird eine sinusförmige Spannung eingespeist, so wird dieses Signal durch den Powersplitter in zwei Signale mit gleicher Amplitude und Phase aufgeteilt. Ein Signal dient als Referenzsignal, während das andere Signal zur Erzeugung der Reflektion am Messobjekt benötigt wird. Dieses Signal wird erst durch das Dämpfungsglied gedämpft und fließt anschließend in den Richtkoppler. Das Dämpfungsglied dient der Isolation zwischen dem Referenzsignal und der durch das Messobjekt reflektierten Welle, da ansonsten dieses Referenzsignal verfälscht wird und nicht in der Ausgangsform zur Verfügung steht. Durch den Richtkoppler wird nun das Signal zum Messobjekt geführt und die reflektierte Welle wird zum Ausgang der Schaltung geleitet. Nun stehen sowohl das vom Messobjekt reflektierte Signal und das Referenzsignal zur Verfügung und müssen nur noch miteinander verglichen werden, um die Eigenschaften des Testobjektes zu bestimmen. Dazu muss das Referenzsignal in den 90°-Hybrid fließen, um eine Aufteilung in Real- und Imaginärteil zu erzielen. Das reflektierte Signal hingegen fließt in einen Powersplitter und erhält damit keine Phasenverschiebung. Die beiden Signale aus dem 90°-Hybrid bzw. aus dem Powersplitter fließen, wie in Abb. 17 gezeigt, jeweils als LO- bzw. RF-Signal in zwei Frequenzmischer. Die Frequenzmischer dienen zum einen der Umwandlung des sinusförmigen Signals in ein Gleichspannungssignal und zum anderen sollen sie das reflektierte Signal in Real- und Imaginärteil aufteilen. Die Umwandlung in ein DC-Signal wird dadurch erreicht, dass in dieser Schaltung zwei Signale mit gleicher Frequenz gemischt werden. 15 6 MHz Vector Reflektometer Circuit Abbildung 18: Funktionsweise von Frequenzmixern Ein Signal wird, entsprechend Abb.18, bei der Frequenz fRF2 = fLO + fIF = 6 MHz + 6 MHz = 12 MHz erzeugt und ein Signal bei der Frequenz fRF1 = fLO – fIF = 6 MHz – 6 MHz = 0 MHz, also ein Gleichspannungssignal erzeugt. Die Aufteilung in Real- und Imaginärteil erfolgt dadurch, dass die Amplituden der erzeugten Signale genau dann am größten sind, wenn die beiden Eingangssignale die gleichen Phasen besitzen. Somit bestimmt die bei der Reflektion verursachte Phasendrehung, welche der beiden Ausgangssignale die größere Amplitude besitzt. Damit lässt sich an der Amplitude der beiden Ausgangssignale, welche durch die Veränderung der Phase des Signals durch das Messobjekt determiniert wird, der Betrag des Imaginär- bzw. des Realteils ablesen. 3.2-PCB-Layout Da der Vektorreflektometer mit SMD-Bauelementen gebaut werden sollte, war es notwendig ein PCB-Layout mithilfe des Programmes EAGLE zu erstellen. Mit diesem Programm sollten wir ein Board erstellen, in welchem die von uns benötigten Leiterbahnen eingezeichnet wurden. Diese Leiterbahnen wurden dann in eine Platine geätzt und wir konnten die SMD-Bauteile anlöten. Abbildung 19: EAGLE-Layout des Vector Reflektometers 16 6 MHz Vector Reflektometer Circuit Zuvor mussten wir jedoch die Breite der Leiterbahnen bestimmen, da für verschiedene Wellenwiderstände unterschiedliche Breiten verwendet werden. Das Programm QUCS enthält dazu eine Funktion, die diese Breiten der Leiterbahnen für verschiedene Materialien und Höhen von Platinen berechnet. Da wir mit einer FF4-Platine mit einem εr = 4,8 und einer Höhe H = 1,6 mm arbeiteten, verwendeten wir eine Breite bzw. Weite W = 2,8 mm. Desweiteren war es auch wichtig die Länge, bzw. den Abstand zwischen den Kontakten der SMD-Bauteile zu beachten, um den richtigen Abstand zwischen den Leiterbahnen zu gewährleisten. Aus einem Katalog konnten wir entnehmen, dass für 0805-Bauteile der Abstand zwischen den Kontakten 0,7 mm beträgt. Da wir in diesem Fall nur bedingt improvisieren und neue Bauteile hinzu schalten konnten, mussten wir überprüfen, welche SMD-Bauteile zur Verfügung standen und welche nachbestellt werden mussten. Wir versuchten die gleichen Werte wie bei den Einzelkomponenten zu verwenden, mussten jedoch an einigen Stellen Veränderungen vornehmen, weil einige Werte für SMD-Bauteile nicht erhältlich waren. Zuletzt erhielten wir die Abmessungen für die Mixer, sodass wir auch hierfür die benötigten Leiterbahnen einzeichnen konnten. 3.3-Implementierung Das PCB-Layout mussten wir anschließend an die Werkstatt weitergeben, damit die Platine erstellt werden konnte, was etwa zwei Wochen dauerte. Nachdem wir die Platine erhalten hatten, musste auch diese FF4-Platine erst mit Azetol gesäubert werden, bevor mit dem Löten beginnen werden konnte. Das Löten von SMD-Bauteilen funktioniert in gleicher Weise wie das Löten größerer Bauteile, mit dem Unterschied, dass SMD-Bauelemente mit der Pinzette festgehalten werden müssen und somit schwieriger zu fassen sind. Als besonders schwierig erwies es sich das Anlöten der der Mixer, da diese Bauteile sechs Eingänge besitzen, welche alle auf die Platine gelötet werden mussten, ohne diese Eingänge miteinander zu verbinden. Abbildung 20: Vector Reflektometer 17 6 MHz Vector Reflektometer Circuit 3.4-Test 3.4.1-Messaufbau Wir führten wieder Messungen mithilfe eines Funktionsgenerators und eines Oszilloskops durch, wobei wir eine sinusförmige Spannung mit einer Amplitude von 5 V und einer Frequenz von 6 MHz einspeisten. Beim der ersten Messung mussten wir jedoch feststellen, dass das Oszilloskop zwei Signale anzeigt, das gewünschte DC-Signal und ein Signal mit einer Frequenz von f = 12 MHz, welche beide, wie oben beschrieben, von den Mixern erzeugt wurden. Da das 12-MHz Signal sich noch innerhalb des Messbereichs des Oszilloskops befand, unsere Testergebnisse jedoch verfälschte, waren wir gezwungen die Schaltung zu modifizieren, um das 12-MHz Signal zu filtern. Daher mussten wir einen Tiefpassfilter an die Ausgänge anlöten, um das hochfrequente Signal zu entfernen, sodass wir nur noch das DC-Signal auf der Anzeige sehen konnten. Für den Tiefpassfilter verwendeten wir einen Widerstand von 1 kOhm und parallel dazu einen Kondensator von 1 nF. Damit erhalten wir eine Grenzfrequenz von 160 kHz, was viel kleiner ist als die Frequenz f = 12 MHz und somit wird das 12-MHz-Signal vom Tiefpass gefiltert. Abbildung 21: Messaufbau beim Vector Reflektometer Mithilfe der Bildspeichern-Funktion des Oszilloskops konnten wir alle Messungen aufnehmen und auf einem USB-Speicher ablegen. Wir testeten den Reflektometer zunächst genau wie den Richtkoppler, indem wir einen 50 Ohm Widerstand für den Anpassungsfall am Messplatz anschlossen, um anschließend noch den Leerlauf- und den Kurzschlussfall zu testen. Um jedoch auch eine Veränderung des Imaginärteils zu erwirken, mussten wir eine kurzgeschlossene Leitung am Messausgang anschließen, sodass wir eine Leitungstransformation eines Kurzschlusses beobachten konnten. Da die Leitungen ein εr von 2,28 besaß, konnten wir die Wellenlänge des Signals über die beiden Formeln Vph=c0/√εr und λ0=Vph/f0 bestimmen. Ineinander eingesetzt erhält man die Formel 18 6 MHz Vector Reflektometer Circuit λ0= c0/(√εr *f0). Damit berechnet sich die Wellenlänge zu λ0 = 31,3m. Somit verwendeten wir Leitungen von etwa 2 m, die wir aneinander anreihten, um den kreisförmigen Verlauf des Reflektionsfaktors am Oszilloskop beobachten zu können. 3.4.2-Ergebnisse Anpassungsfall Kurzschlussfall Leerlauffall 19 6 MHz Vector Reflektometer Circuit Leitungen (v.l.n.r.: 2 m; 4 m; 6 m; 8 m; 10 m; 12 m; 14 m; 16 m) 20 6 MHz Vector Reflektometer Circuit 3.4.3-Fehlerbetrachtung An den Ergebnissen wird deutlich, dass die Schaltung prinzipiell wie gewünscht funktioniert. Bei Anpassung liegt die gemessene Spannung in der Nähe des Urspungs und entspricht somit dem Wert 0. Dennoch wird, wie im Falle des Richtkopplers, immer noch eine kleine Spannung gemessen. Beim Kurzschluss- und Leerlaufversuch liegen die Werte der Spannungen genau auf der gegenüberliegenden Seite, als wären sie am Nullpunkt gespiegelt worden. Dies entspricht zwar dem Erwartungswert, jedoch liegen die Punkte nicht genau auf der X-Achse, wie es eigentlich erwünscht war, sondern sind ein wenig versetzt. Es scheint, als ob die Einzelkomponenten, auch ohne eine Phasendrehung durch das Messobjekt, eine kleine Phasenverschiebung bewirken. Durch diese Änderung der Phase erscheint es, als ob das Messobjekt einen kapazitiven bzw. induktiven Anteil besitzt, was, wie wir wissen, jedoch nicht der Fall ist. Darüber hinaus hatten wir auch erwartet, dass die beiden Mixer nicht völlig gleichartig funktionieren und dass die Spannungen durch die Mixer unterschiedlich stark verstärkt würden. Dies hätte dazu geführt, dass beim Test mit der immer länger werdenden Leitung nicht ein kreis-, sondern ein ovalförmiger Verlauf auf dem Oszilloskop zu erkennen gewesen wäre. Dies wäre ein enormer Fehler, da sich durch Leitungstransformationen nicht der Betrag sondern nur die Phase der Spannung entsprechend der Formel Δ ф = β*l ändert, wobei l die Länge der verwendeten Leitung ist. Bei genauerer Betrachtung erkennt man, dass der Verlauf nicht vollkommen kreisförmig ist, dieser Fehler ist jedoch viel geringer als zu befürchten war. 21 6 MHz Vector Reflektometer Circuit Quellen Internetseiten: 1. http://www.mwrf.com/Articles/ArticleID/5541/5541.html, Convert Distributed MICs to MMICs, John E. Penn, July 2003. 2. http://www.zen118213.zen.co.uk/RFMicrowave_Circuits_Page.htm, RF, RFIC & Microwave Theorie, Design Skripte: 1. Elektronik und Hochfrequenztechnik Praktikum Teilpraktikum: Microwave and RF Technology (MRFT), Fachgebiet Hochfrequenztechnik: Prof.Dr.-Ing.K.Solbach - MRFT Student Lab, version2.0 Experiment no.8 - MRFT Student Lab, version2.0 Experiment no.11 2. Microwave and RF Technology, University Duisburg-Essen Campus Duisburg 8th Edition, summer semester 2010, Fachgebiet Hochfrequenztechnik: Prof.Dr.-Ing.K.Solbach 22