Einführung in numerische Methoden für Ingenieure
Werbung

Kapitel 8
Partielle Differentialgleichungen/Randwertprobleme
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/2
Einführung und Beispiele
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/3
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Einführung und Beispiele
• Randwertprobleme: Differentialgleichungen für eine Lösungsfunktion
u auf einem Intervall (a, b), für die der Wert an den Grenzen a und b
vorgegeben sind
• Mehrdimensionaler Fall: Differentialgleichung ist auf einer offenen
R
Teilmenge Ω ∈ d gegeben, enthält partielle Ableitungen der
Lösungsfunktion bezüglich der Raumkoordinaten
∂u
u(x0 + hei ) − u(x0 )
(x0 ) = lim
h→0
∂xi
h
• Werte von u auf dem Rand ∂Ω sind vorgegeben
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/4
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Poisson-Gleichung
• Die Poisson-Gleichung in einer Dimension
−u00 (x) = f (x),
x ∈ (a, b)
• In mehreren Dimensionen
−∆u(x) = f (x), x ∈ Ω
Hierbei ist ∆ der Laplace-Operator:
d
X
∂2u
∆u =
2
∂x
i
i=1
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/5
Konvergenz
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Die Wärmeleitungsgleichung
• Die Wärmeleitungsgleichung
∂ u(x, t)
∂ 2 u(x, t)
−µ
= f (x, t)
∂t
∂x2
für x ∈ (a, b) und t > 0
• In mehreren Dimensionen
∂ u(x, t)
− µ∆u(x, t) = f (x, t)
∂t
für x ∈ Ω ⊂ d und t > 0
R
• t Zeit, µ thermische Leitfähigkeit
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/6
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Wellengleichung
• Die Wellengleichung
2
∂ 2 u(x, t)
2 ∂ u(x, t)
−c
=0
∂t2
∂x2
für x ∈ (a, b) und t > 0
• In mehreren Dimensionen
∂ 2 u(x, t)
− c2 ∆u(x, t) = 0
2
∂t
für x ∈ Ω ⊂ d und t > 0
R
• c Ausbreitungsgeschwindigkeit der Wellen
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/7
Konvergenz
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Beispiel: Thermodynamik
• Berechnung der Temperaturverteilung in einem Quadrat Ω
Seitenlänge L
• Sei J(x) die Energieübertragung pro Zeiteinheit. Es gilt (Taylor)
∂J
(x)
J(x) − J(x + lei ) = −
∂xi
• Gesetz von Fourier: J ist proportional zur räumlichen Veränderung
der Temperatur T . Daher:
2
∂
∂T
2∂ T
J(x) − J(x + lei ) = −
kl
= −kl
∂xi
∂xi
∂x2i
• Summe der Energieschwankungen muss Null sein (im Gleichgewicht)
d
X
∂2T
∆T (x) =
2 (x) = 0
∂x
i
i=1
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/8
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Beispiel: Hydrogeologie
• Studium von Filtrierungsprozessen in Grundwasser
• Zweidimensionales Gebiet Ω, besteht aus einem porösen Medium mit
konstanter hydraulische Leitfähigkeit K
• Darcy-Gesetz: mittlere Filtrierungsgeschwindigkeit des Wassers
q = (q1 , q2 , q2 ) ist proportional der Veränderung der Wasserhöhe φ
∂φ ∂φ ∂φ T
q = −Kgrad(φ) = −K
,
,
∂x1 ∂x2 ∂x3
• Massenerhaltung und konstante Dichte des Fluids führen auf
3
X
∂ qi
=0
div(q) =
∂xi
i=1
• Aus beiden Gleichungen zusammen folgt
div(grad(φ)) = ∆φ = 0
d.h. φ erfüllt das Poisson-Problem
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/9
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Randbedingungen
• Poisson-Gleichung lässt unendlich viele Lösungen zu
• Für eine eindeutige Lösung müssen geeignet Bedingungen am Rand
∂Ω gestellt werden
• Dirichlet-Randbedingungen schreiben den Wert von u auf ∂Ω vor
u(x) = g(x)
für x ∈ ∂Ω
• Neumann-Randbedingungen schreiben den Wert der Ableitung von u
in Normalenrichtung am Rand vor
∂u
(x) = n · grad(u) = h(x)
∂n
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/10
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Lösbarkeit von Randwertproblemen
• Eindeutige Lösbarkeit des Dirichlet-Randwertproblems kann gezeigt
werden, wenn
1
2
die Funktionen f und g stetige sind und
das Gebiet Ω hinreichend regulär ist
• Die Lösung des Neumann-Problems ist unter den gleichen
Bedingungen eindeutig, bis auf eine additive Konstante
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/11
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Das Dirichlet-Randwertproblem
• Betrachte eindimensionalen Fall des Dirichlet-Randwertproblems
• Gegeben: zwei Konstanten α und β und eine Funktion f (x)
• Finde eine Funktion u(x), so dass
−u00 (x) = f (x)
u(a) = α
u(b) = β
für x ∈ (a, b)
• Man kann durch zweifache Integration leicht zeigen: wenn
f ∈ C 0 ([a, b]) (d.h. f ist stetig), dann existiert eine eindeutige
Lösung u ∈ C 2 ([a, b]) (d.h. u ist zweimal stetig differenzierbar)
• Bemerkung: Das Randwertproblem kann nicht in die Form eines
Cauchy-Problems gebracht werden, da u an verschiedenen Punkten
vorgegeben ist.
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/12
Finite Differenzen
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/13
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Finite Differenzen
• Unterteile das Intervall [a, b] in N + 1 Teilintervalle Ij = [xj , xj+1 ]
mit j = 0, . . . , N
• Alle Intervall haben die gleiche Breite h (der Einfachheit halber)
• Die Differentialgleichung muss in jedem Punkt erfüllt sein, d.h. für
alle j = 1, . . . , N
−u00 (xj ) = f (xj )
(*)
• An den Rändern gilt u(x0 ) = α bzw. u(xN +1 ) = β
• Ersetze in Gl. (*) die zweite Ableitung durch eine finite
Differenzenapproximation
u(x + h) − 2u(x) + u(x − h)
δ 2 u(x) =
h2
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/14
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Finite Differenzen
• Für alle Knoten xj mit j = 1, . . . , N gilt dann
uj+1 − 2uj + uj−1
= f (xj )
h2
und an den Rändern gilt u0 = α bzw. uN +1 = β
−
• Fasst man die Koeffizienten in der Matrix A zusammen, die Werte an
den Knoten im Lösungsvektor u = (u1 , . . . , uN )T und die rechte
Seite als f erhält man
Au = h2 f
• Bei dem ersten und letzten Eintrag der rechten Seite müssen um die
Randwerte α und β korrigiert werden
f = (f (x1 ) + α/h2 , f (x2 ), . . . , f (xN −1 ), f (xN ) + β/h2 )T
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/15
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Finite Differenzen
• Die Matrix A hat folgende Form
2 −1 0 · · · 0
..
−1 2 −1
.
.
.
.. 0
A = 0 −1 . .
..
..
. 2 −1
.
0 · · · 0 −1 2
• A ist symmetrisch und positiv definit
• A ist tridiagonal ⇒ kann effizient mit dem Thomas-Algorithmus
gelöst werden
• Schlecht konditioniert: Konditionszahl K(A) = λmax /λmin = Ch−2
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/16
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Fehler der finiten Differenzen
• Fehler des Verfahrens (wenn f zweimal stetig differenzierbar)
h2
max |u(xj ) − uj | ≤
max |f 00 (x)|
j=0,...,N +1
96 x∈[a,b]
• Folgerung: das Verfahren konvergiert mit Ordnung 2
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/17
Konvergenz
Finite Elemente
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/18
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Finite Elemente
• Alternatives Verfahren zu finiten Differenzen
• Betrachte das Ausgangsproblem
−u00 (x) = f (x)
• Multipliziere beide Seiten mit einer beliebigen Funktion v und
integriere
b
Z
−
Z
00
u (x)v(x)dx =
b
f (x)v(x)dx
a
a
• Durch partielle Integration erhalten wir
Z
b
0
0
0
u (x)v (x)dx − [u
a
(x)v(x)]ba
Z
=
b
f (x)v(x)dx
a
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/19
Konvergenz
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Finite Elemente
• Annahme v wird Null an den Rändern a und b (Dies läßt sich auch
streng begründen, soll hier aber nicht gemacht werden)
Z b
Z b
u0 (x)0 v(x)dx =
f (x)v(x)dx
a
(*)
a
• Gleichung (*) ist definiert für alle Funktionen u, v ∈ C 1
• Einschränkung jetzt auf eine endliche Teilmenge: stückweise lineare
Polynome
A. Quarteroni,
F. Saleri
Prof. R. Leithner,Quelle:
E. Zander
| Einführung
in numerische Methoden für Ingenieure | 8/20
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Finite Elemente
• Raum der Stückweise linearen Polynome Vh
• Mit Einschränkung, dass die Funktionen an den Intervallgrenzen
verschwinden Vh0
• Das Finite-Elemente-Approximations-Problem ist dann
folgendermassen definiert:
Definition (Finite Elemente Approximation)
Finde uh ∈ Vh , so dass uh (a) = α und uh (b) = β und
Z b
Z b
0
0
uh (x)vh (x)dx =
f (x)v(x)dx
a
für alle vh ∈
a
Vh0
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/21
Konvergenz
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
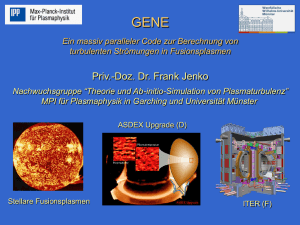
Finite Elemente Basisfunktionen
• Funktionen in Vh0 sind stückweise lineare Polynome
• Basisfunktionen φk in der Abbildung dargestellt
• Jede Funktion vh in Vh0 lässt sich darstellen als
vh (x) =
N
X
vj φj (x)
j=1
mit vj = vh (xj )
Quelle: A. Quarteroni, F. Saleri
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/22
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Finite Elemente Basisfunktionen
• Darstellung der Basisfunktion φj (x):
φj (x) =
x−xj−1
x
j −xj−1
fallsx ∈ [xj−1 , xj ],
0
sonst
x−xj+1
xj −xj+1
fallsx ∈ [xj , xj+1 ],
• Die φj heißen auch Formfunktionen oder Hutfunktionen
• Es gilt φj (xk ) = δjk
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/23
Konvergenz
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Finite Elemente
• Es ist ausreichend wenn die Gleichung
Z
b
u0h (x)vh0 (x)dx
b
Z
=
a
f (x)v(x)dx
a
nur für alle Basisfunktionen φj erfüllt ist
• Sie ist dann automatisch auch für alle vh ∈ Vh0 erfüllt
• Einsetzen des Ansatzes
uh (x) = αφ0 (x) +
N
X
uj φj (x) + βφN +1 (x)
j=1
führt dann auf N lineare Gleichungen in den uj , d.h. ein lineares
Gleichungssystem der Form
Au = f
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/24
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Finite Elemente
• In dem linearen Gleichungssystem Au = f ist die Matrix A gegeben
durch
Z
(A)ij =
b
φ0i (x)φ0j (x)dx
a
und die rechte Seite f durch
Z b
(f )i =
f (x)φi (x)dx
a
• Integrationen brauchen nicht über das ganze Intervall [a, b] zu laufen,
sondern nur über das kleine Teilintervall, wo φi bzw. φj nicht Null ist
• Die Integration wird im Allgemeinen numerisch ausgeführt mit
Methoden, wie sie in Kapitel 4 vorgestellt wurden (bevorzugt
Gauss-Integration)
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/25
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Finite Elemente
• Wenn alle Intervalle die gleiche Länge h haben ist A die gleiche
Matrix wie bei den finiten Differenzen
• Die rechte Seite unterscheidet sich dagegen: während bei finiten
Differenzen der Vektor f die Werte von f an genau an einem Punkt
enthält, sind es bei finiten Elementen gemittelte Werte
• Finite Elemente können auch stückweise Polynome höheren Grades
verwenden, was die Genauigkeitsordnung des Verfahrens entsprechend
erhöht
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/26
Finite Differenzen in zwei
Dimensionen
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/27
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Finite Differenzen in zwei Dimensionen
• Betrachte partielle Differentialgleichung in einem zweidimensionalen
Gebiet Ω
• Idee: approximiere partielle Ableitungen durch Differenzenquotienten
auf einem Gitter
• Lösung u wird nur in den Knoten des Gitters approximiert
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/28
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Diskretisierungsgitter
• Problem: Konstruktion eines geeigneten Diskretisierungsgitters
• Annahme: Ω ist ein Rechteck (a, b) × (c, d)
• Unterteile (a, b) in Intervalle (xk , xk+1 ) gleicher Länge
hx = (b − a)/(Nx + 1) mit k = 0, . . . , Nx
• Unterteile (c, d) in Intervalle (yk , yk+1 ) gleicher Länge
hy = (d − c)/(Ny + 1) mit k = 0, . . . , Ny
• Knotenwerte ui,j an Gitterpunkten u(xi , yj ) gesucht
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/29
Konvergenz
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Diskretisierungsgitter
Quelle: A. Quarteroni, F. Saleri
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/30
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Differenzenquotienten
• Approximation der partiellen Ableitung durch Differenzenquotienten
(wie in Kapitel 4)
• In x-Richtung
δx2 ui,j =
ui−1,j − 2ui,j + ui+1,j
h2x
• In y-Richtung
ui,j−1 − 2ui,j + ui,j+1
h2y
• Genauigkeitsordnung ist 2 bezüglich hx bzw. hy
δy2 ui,j =
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/31
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Diskretisierung der Differentialgleichung
• In der partiellen Differentialgleichung
∂2u ∂2u
−
+ 2 = f (x, y)
∂x2
∂y
werden die partiellen Ableitungen jetzt durch die
Differenzenquotienten ersetzt
− δx2 ui,j + δy2 ui,j = fi,j
• Falls das Gitter in beide Richtungen gleichmäßig ist, d.h.
hx = hy = h, erhalten wir
1
− 2 (ui−1,j + ui,j−1 − 4ui,j + ui+1,j + ui,j+1 ) = fi,j
h
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/32
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Diskretisierung der Differentialgleichung
Quelle: A. Quarteroni, F. Saleri
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/33
Konvergenz
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Diskretisierung der Differentialgleichung
• Für jeden Knoten ui,j benötigt die diskretisierte Gleichung 5
Knotenwerte
⇒ Name des Verfahrens auch 5-Punkt-Verfahren für den
Laplace-Operator
• Zu den Randknoten gehörige Unbekannte werden mit
ui,j = gi,j
eliminert. Für die Randknoten ist i = 0 oder i = Nx oder j = 0 oder
j = Ny .
• Das Verfahren hat daher nur N = Nx NY Unbekannte.
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/34
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Diskretisierung der Differentialgleichung
• Bringe die Knoten in lexikographische Ordnung, d.h. nummeriere von
links nach rechst, dann von oben nach unten
• Beispiel für Nx = 5, Ny = 3:
(1, 1), (2, 1), . . . , (5, 1), (1, 2), . . . , (5, 2), (1, 3), . . . , (5, 3)
| {z } | {z }
| {z } | {z }
| {z } | {z }
| {z }
1
2
5
6
10
11
15
• Die Matrix A nimmt jetzt block-tridiagonale Form an
T
D
D T
A = 0 ...
..
.
0
···
0 ···
..
.
..
. D
D
0
T
D
0
..
.
0
D
T
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/35
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Diskretisierung der Differentialgleichung
• Die Einträge D und T sind selbst wieder Matrizen (daher
block-tridiagonal)
• D ist eine Diagonalmatrix mit Einträgen −1/h2 auf der Diagonalen
• T ist folgende tridiagonale Matrix
2 −1 0 · · · 0
..
−1 2 . . .
.
1
.
.
..
. . −1 0
T= 2 0
h
..
.
−1
2 −1
0 · · · 0 −1
2
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/36
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
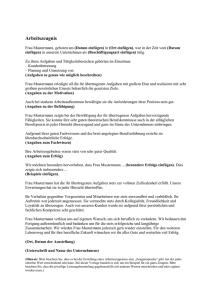
Diskretisierung der Differentialgleichung
Quelle: A. Quarteroni, F. Saleri
Muster der zum 5-Punkte-Verfahren gehörigen Matrix mit
lexikographischer Ordnung der Unbekannten
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/37
Konvergenz
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Diskretisierung der Differentialgleichung
• Die Matrix A ist symmetrisch und positiv definit
• A ist daher auch nicht-singulär und das System besitzt eine
eindeutige Lösung
• A ist eine dünnbesetzte Matrix: die Anzahl der Elemente ungleich
Null ist sehr viel kleiner als die gesamte Anzahl der Elemente der
Matrix
• Alle Elemente ungleich Null liegen auf nur fünf Diagonalen
• Erzeugung dünnbesetzter Matrizen in Matlab mit dem Befehl
sparse
• System kann mit direkten als auch mit iterativen Verfahren gelöst
werden. Aber: die Matrix ist schlecht konditioniert für kleine h
(Konditionszahl O(h− 2))
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/38
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
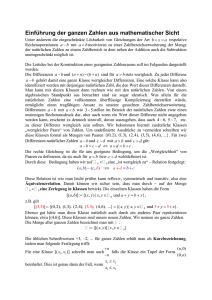
Beispiel
• Beispiel: Lösen des Poisson-Problems mit rechter Seite
f (x, y) = 8π 2
• Dirichlet-Randbedingungen:
g(0, y) = g(1, y) = 0
g(x, 0) = g(x, 1) = sin(2πx)
• Numerische Lösung mit dem 5-Punkte-Verfahren mit h = 1/10 und
h = 1/20
• Relativer Fehler in den Knoten 0.029 bzw. 0.0081
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/39
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Beispiel
Quelle: A. Quarteroni, F. Saleri
Lösung der Poisson-Gleichung mit finiten Differenzen und h = 1/10
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/40
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Beispiel
Quelle: A. Quarteroni, F. Saleri
Lösung der Poisson-Gleichung mit finiten Differenzen und h = 1/20
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/41
Konvergenz
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/42
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Konsistenz und Konvergenz
• Wie groß ist der Approximationsfehler? Geht dieser gegen Null, wenn
h → 0?
• Falls ja, d.h.
max |u(xi , yi ) − ui,j | → 0 wenn h → 0
i,j
ist das Verfahren konvergent.
• Notwendige Bedingung für die Konvergenz eines Verfahrens ist die
Konsistenz.
• Konsistenz: der lokale Abschneidefehler geht gegen Null für h → 0
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/43
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Konsistenz und Konvergenz
• Lokaler Abschneidefehler: der Fehler, der entsteht, wenn die exakte
Lösung in das numerische Verfahren eingesetzt wird
• Lokaler Abschneidefehler τh im Knoten (xi , yj ) für das
5-Punkte-Verfahren:
τh (xi , yi ) = − f (xi , yj ) − (u(xi−1 , yj ) + u(xi , yj−1 )
− 4u(xi , yj ) + u(xi , yj+1 ) + u(xi+1 , yj ))/h2
• Es lässt sich schließen (Hinweis: Taylor-Entwicklung in zwei
Variablen), dass
lim τh (xi , yj ) = 0
h→0
D.h. das Verfahren ist konsistent.
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/44
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Konsistenz und Konvergenz
• Ferner kann man zeigen, dass das Verfahren auch konvergent ist.
• Es gilt folgender Satz:
Satz (Konvergenz des 5-Punkte-Verfahrens)
Sei die exakte Lösung u ∈ C 4 (Ω̄), das heißt, all ihre Ableitungen bis zur
vierten Ordnung sind auf dem abgeschlossenen Gebiet Ω̄ stetig. Dann
existiert eine Konstante C > 0, so dass
max |u(xi , yj ) − ui,j | ≤ CM h2 ,
i,j
wobei M der maximale Absolutbetrag der vierten Ableitung von u in Ω̄
ist.
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/45
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Zusammenfassung
• Randwertprobleme sind Differentialgleichungen auf einem Gebiet
R
Ω ⊂ d (einem Intervall, falls d = 1), die Informationen über die
Lösung auf dem Rand von Ω benötigen;
• Die Approximation mit finiten Differenzen basiert auf der
Diskretisierung einer gegebenen Differentialgleichung in ausgewählten
Punkten (Knoten genannt), in denen die Ableitungen durch
Finite-Differenzen-Formeln ersetzt werden;
• Das Verfahren der finiten Differenzen erzeugt einen Vektor, dessen
Komponenten bezüglich der Schrittweite quadratisch gegen die
exakte Lösung konvergieren;
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/46
Einführung und Beispiele
Finite Differenzen
Finite Elemente
Finite Differenzen in zwei Dimensionen
Konvergenz
Zusammenfassung
• Das Verfahren der finiten Elemente basiert auf einer geeigneten
Umformulierung der ursprünglichen Differentialgleichung und auf der
Annahme, dass die angenäherte Lösung ein stückweise stetiges
Polynom ist;
• Die zu den Diskretisierungen mit finiten Differenzen und finiten
Elementen gehörigen Matrizen sind dünn besetzt und schlecht
konditioniert.
Prof. R. Leithner, E. Zander | Einführung in numerische Methoden für Ingenieure | 8/47