Grundlagen der Analytischen Mechanik
Werbung

Höhere Technische Mechanik
Grundlagen der Analytischen Mechanik
Prof. Dr.-Ing. Ulrike Zwiers, M.Sc.
Fachbereich Mechatronik und Maschinenbau
Hochschule Bochum
WS 2009/2010
Grundlagen der Analytischen Mechanik
Übersicht
1. Grundlagen der Analytischen Mechanik
◦ Kinematische Grundlagen
-
Freiheitsgrade
Bindungen
Generalisierte Koordinaten
Virtuelle Verrückungen
◦ Prinzipe der Mechanik
-
Prinzip der virtuellen Arbeit
Prinzip von d’Alembert
Lagrangesche Gleichungen 2.Art
Lagrangesche Gleichungen 1.Art
◦ Analyse nichtholonomer Systeme
2. Schwingungen linearer Systeme mit einem Freiheitsgrad
3. Schwingungen linearer Systeme mit mehreren Freiheitsgraden
4. Schwingungen linearer kontinuierlicher Systeme
Prof. Dr. U. Zwiers
STME
2/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 1/13
Begriffe & Definitionen
Synthetische Mechanik
Teilgebiet der Mechanik, das unter Anwendung des Schnittprinzips
die Bewegung von Körpern und von Systemen von Körpern mit
Hilfe von Impuls- und Drehimpulsbilanzen untersucht
Analytische Mechanik
Teilgebiet der Mechanik, das ein mechanisches System als Ganzes
behandelt, d.h. ohne Einzelkörper durch Freischneiden von ihren
Bindungen zu isolieren
Prof. Dr. U. Zwiers
STME
3/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 2/13
Begriffe & Definitionen (Forts.)
Freiheitsgrad
Bewegungsmöglichkeit eines Körpers (bzw. eines Systems), die
unabhängig von anderen Bewegungen ausgeführt und durch eine
unabhängige Koordinate beschrieben werden kann
freie Objekte
Freiheitsgrade
Massenpunkt
in der Ebene
im Raum
2
3
Starrer Körper
in der Ebene
im Raum
3
6
Prof. Dr. U. Zwiers
STME
4/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 3/13
Begriffe & Definitionen (Forts.)
Bindung
Einschränkung der Anzahl der Freiheitsgrade eines Systems gemäß
des Typs und der Wertigkeit einer Bindung
f = N · ffrei −
n
X
k=1
wk ,
f
Freiheitsgrade eines Systems
N
Anzahl der Körper eines Systems
ffrei Freiheitsgrade der freien Körper
Prof. Dr. U. Zwiers
n
Anzahl der Bindungen eines Systems
wk
Wertigkeit einer Bindung
STME
5/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 4/13
Begriffe & Definitionen (Forts.)
Klassifizierung von Bindungen
geometrisch
Beschränkung der Lage
kinematisch
Beschränkung der Geschwindigkeit
einseitig
Ungleichungsbedingung
zweiseitig
Gleichungsbedingung
skleronom
nicht explizit zeitabhängig
rheonom
explizit zeitabhängig
holonom
geometrische oder integrierbare
kinematische Bindung
nichtholonom
einseitige oder nicht integrierbare
kinematische Bindung
Prof. Dr. U. Zwiers
STME
6/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 5/13
Begriffe & Definitionen (Forts.)
Beispiele zur Klassifizierung von Bindungen
a) Φk (q1 , . . . , q3N ) = 0
֒→ geometrisch, zweiseitig, skleronom, holonom
b) Φk (q1 , . . . , q3N , t) ≤ 0
֒→ geometrisch, einseitig, rheonom, nichtholonom
c) Φk (q1 , . . . , q3N , q̇1 , . . . , q̇3N , t) = 0
֒→ kinematisch, zweiseitig, rheonom
3N
X
aki q̇i + bk = 0 ,
aki = aki (q1 , . . . , q3N , t)
i=1
bk = bk (q1 , . . . , q3N , t)
∂akj
∂aki
∂bk
∂aki
=
und
=
֒→ holonom, falls
∂qj
∂qi
∂t
∂qi
Prof. Dr. U. Zwiers
STME
7/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 6/13
Begriffe & Definitionen (Forts.)
Beispiel: Geometrische Bindung
ϕ
ℓ
ℓ
m
~v
~v
m
x2 + y 2 = ℓ2
x2 + y 2 ≤ ℓ2
zweiseitig
einseitig
Prof. Dr. U. Zwiers
STME
8/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 7/13
Begriffe & Definitionen (Forts.)
Beispiel: Kinematische Bindung
z
ψ
Koordinaten
x, y, θ, ψ, φ
Bindungsgleichungen
ẋ = rφ̇ sin θ
φ̇
ẏ = rφ̇ cos θ
x
r
nichtholonomes System
~v
y
θ
Prof. Dr. U. Zwiers
STME
9/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 8/13
Begriffe & Definitionen (Forts.)
Generalisierte Koordinaten
Die Konfiguration eines holonomen Systems mit f Freiheitsgraden
kann durch f voneinander unabhängigen (generalisierten)
Koordinaten qi , i = 1, . . . , f eindeutig beschrieben werden, sofern
die folgenden Bedingungen erfüllt sind:
◮
Die Ortsvektoren sind durch die generalsierten Koordinaten qi
bestimmt: r i = r i (q1 , . . . , qf , t).
◮
Die p Bindungen Φk (r 1 , . . . , r N , t) = 0, k = 1, . . . , p sind für
jede beliebige Wahl der generalisierten Koordinaten qi erfüllt.
◮
Die generalisierten Koordinaten qi sind voneinander unabhängig, d.h. es besteht kein funktionaler Zusammenhang der
Form g(q1 , . . . , qf , t) = 0.
Prof. Dr. U. Zwiers
STME
10/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 9/13
Begriffe & Definitionen (Forts.)
Ergänzende Anmerkungen
◮
Der f -dimensionale Raum, der durch die generalisierten Koordinaten
qi aufgespannt wird, bildet den Konfigurationsraum, in dem jeder
Punkt q = [q1 , q2 , . . . , qf ] einem möglichen Zustand des Systems
entspricht.
◮
Die zeitlichen Ableitungen der generalisierten Koordinaten,
q̇1 , q̇2 , . . . , q̇f , werden als generalisierte Geschwindigkeiten
bezeichnet.
◮
Die Wahl der generalisierten Koordinaten qi ist nicht eindeutig.
◮
Bei bekannten Anfangsbedingungen q(t0 ) = q 0 und q̇(t0 ) = q̇ 0 ist
der Zustand des Systems im Konfigurationsraum für alle Zeiten über
noch festzulegende Bewegungsgleichungen berechenbar.
Prof. Dr. U. Zwiers
STME
11/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 10/13
Begriffe & Definitionen (Forts.)
Beispiel: Doppelpendel mit masselosen Stäben und Punktmassen
Ortsvektoren
x1
ℓ1 sin ϕ1
r1 =
=
−ℓ1 cos ϕ1
y1
x2
ℓ1 sin ϕ1 + ℓ2 sin ϕ2
r2 =
=
y2
−ℓ1 cos ϕ1 − ℓ2 cos ϕ2
y
x
ϕ1
ℓ1
Bindungen
Φ1 = x21 + y12 − ℓ21 = 0
m1
Φ2 = (x2 − x1 )2 + (y2 − y1 )2 − ℓ22 = 0
Freiheitsgrade f = 2
ϕ2
Wahl der generalisierten Koordinaten
q 1 = ϕ 1 , q2 = ϕ 2
Prof. Dr. U. Zwiers
ℓ2
m2
STME
12/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 11/13
Begriffe & Definitionen (Forts.)
Beispiel: Doppelpendel mit homogenen Stäben ohne Punktmassen
Ortsvektoren
x1
(ℓ1 /2) sin ϕ1
r1 =
=
y1
−(ℓ1 /2) cos ϕ1
x2
ℓ1 sin ϕ1 + (ℓ2 /2) sin ϕ2
r2 =
=
y2
−ℓ1 cos ϕ1 − (ℓ2 /2) cos ϕ2
Bindungen
Φ1 = x21 + y12 − ℓ21 /4 = 0
y
x
ϕ1
ℓ1 , m1
Φ2 = (x2 − 2x1 )2 + (y2 − 2y1 )2 − ℓ22 /4 = 0
Φ3 = tanϕ1 + x1 /y1 = 0
Φ4 = tanϕ2 + (2x1 − x2 )/(2y1 − y2 ) = 0
Freiheitsgrade f = 2 ⇒ q1 = ϕ1 , q2 = ϕ2
Prof. Dr. U. Zwiers
STME
ϕ2
ℓ2 , m2
13/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 12/13
Begriffe & Definitionen (Forts.)
Virtuelle Verrückungen
Bewegung eines mechanischen Systems mit den folgenden
Merkmalen:
◮
gedachte Verschiebung oder Drehung,
◮
infinitesimal klein,
◮
mit den Bindungen des Systems verträglich.
r = r(q1 , q2 , . . . , qf )
⇒
δr =
∂r
∂r
∂r
δq1 +
δq2 + · · · +
δqf
∂q1
∂q2
∂qf
δϕ
verträglich
Prof. Dr. U. Zwiers
unverträglich
STME
14/35
Grundlagen der Analytischen Mechanik
Kinematische Grundlagen 13/13
Begriffe & Definitionen (Forts.)
Beispiele zu virtuellen Verrückungen
a
δyA
ϕ
F1
ϕ+δϕ
b
δϕ
δw1 = a · δϕ
δw2 = b · δϕ
Prof. Dr. U. Zwiers
ℓ
F2
δw1
δw2
δxB
yA = ℓ cos ϕ
xB = ℓ sin ϕ
dyA
δϕ = −ℓ sin ϕ · δϕ
dϕ
dxB
δxB =
δϕ = ℓ cos ϕ · δϕ
dϕ
δyA =
STME
15/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 1/16
Hauptproblem der Dynamik
Bewegungsgleichungen eines gebundenen Systems
mi r̈ i = F i + Ri ,
N
i = 1, . . . , N
(*)
Anzahl der Massenpunkte
mi Masse
r i Ortsvektor
F i Vektor der eingeprägten Kräfte
Ri Vektor der Reaktionskräfte
Unbekannte: 6N
Komponenten von r i und Ri
Gleichungen: 3N
Bewegungsgleichungen (*)
p
holonome Bindungsgleichungen
———
3N−p fehlende Beziehungen (=Anzahl Freiheitsgrade)
Prof. Dr. U. Zwiers
STME
16/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 2/16
Hauptproblem der Dynamik (Forts.)
Ideale Bindung
Eine Bindung ist ideal, wenn die Reaktionskräfte zu beliebigen
virtuellen Verrückungen keine virtuelle Arbeit leisten, d. h.
N
X
RT
δW =
i δr i = 0 .
i=1
N
X
(Rx,i δxi + Ry,i δyi + Rz,i δzi ) = 0
i=1
Formulierung in f generalisierten Koordinaten qi
g1 (. . . ) δq1 + g2 (. . . ) δq2 + · · · + gf (. . . ) δqf = 0
| {z }
| {z }
| {z }
→ f Bedingungen
=0
=0
=0
Prof. Dr. U. Zwiers
STME
17/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 3/16
Fundamentalgleichung der Dynamik
Fundamentalgleichung der Dynamik
Bei der Bewegung eines mechanischen Systems mit idealen
Bindungen ist die Summe der Arbeiten, die von den eingeprägten
Kräften F i und den Trägheitskräften −mi r̈ i auf beliebigen
virtuellen Verschiebungen geleistet werden, gleich null, also
N
X
(F i − mi r̈ i )T δr i = 0 .
i=1
Prof. Dr. U. Zwiers
STME
18/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 4/16
Fundamentalgleichung der Dynamik (Forts.)
Prinzip der virtuellen Arbeit
Ein mechanisches System befindet sich im Gleichgewicht, wenn bei
einer virtuellen Verschiebung aus der Gleichgewichtslage heraus die
dabei von den eingeprägten Kräften geleistete virtuelle Arbeit
verschwindet, also
N
X
FT
i δr i = 0 .
i=1
Prinzip von d’Alembert
Jede Lage eines Systems während der Bewegung kann als eine
Gleichgewichtslage aufgefasst werden, wenn zu den eingeprägten
Kräften die Trägheitskräfte hinzugenommen werden.
Prof. Dr. U. Zwiers
STME
19/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 5/16
Fundamentalgleichung der Dynamik (Forts.)
Annahme: holonomes System
r i = r i (q1 , . . . , qf , t) ,
δr i =
f
X
∂r i
k=1
"
∂qk
f
N X
X
k=1
δqk ,
F i − mi r̈ i
i=1
i = 1, . . . , N
i = 1, . . . , N
T
#
∂r i
δqk = 0
∂qk
f Bewegungsgleichungen:
N X
F i − mi r̈ i
i=1
T
∂r i
=0
∂qk
k = 1, . . . , f
Prof. Dr. U. Zwiers
STME
20/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 6/16
Fundamentalgleichung der Dynamik (Forts.)
Beispiel: Gleichgewicht einer Hebebühne
Prinzip der virtuellen Arbeit
GT δr G + F T δr F = 0
Ortsvektoren
a
2 cos α
, rG =
rF =
2 sin α
0
a
Virtuelle Verschiebungen
∂r F
−2 sin α
δr F =
δα =
δα
0
∂α
∂r G
0
δα =
δr G =
δα
2 cos α
∂α
bc
G
ℓ
ℓ
ℓ
α
ℓ
bc
F
Hebekraft: F = G cot α
Prof. Dr. U. Zwiers
STME
21/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 7/16
Fundamentalgleichung der Dynamik (Forts.)
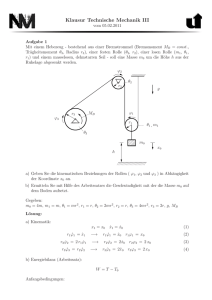
Beispiel: Rollende Seiltrommel
Kinematische Beziehungen
δxS = r2 δϕ
δxA = δy = (r2 − r1 ) δϕ
m1 , k
r2
r1
Virtuelle Arbeiten
δWe = m2 g δy
bc
δWT = −(m1 ẍS δxS + m1 k 2 ϕ̈ δϕ + m2 ÿ δy)
Prinzip von d’Alembert
δWe + δWT = 0
m2
Winkelbeschleunigung
(r2 − r1 )m2 g
ϕ̈ = 2
2
(r2 + k )m1 + (r2 − r1 )2 m2
Prof. Dr. U. Zwiers
STME
22/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 8/16
Fundamentalgleichung der Dynamik (Forts.)
„Kochrezept“ zur Anwendung des Prinzips von d’Alembert
1. Aufstellen der Bindungsgleichungen Φi = 0
2. Ermitteln der Anzahl an Freiheitsgraden und Festlegen der
verallgemeinerten Koordinaten qi
3. Aufstellen der Ortsvektoren als Funktionen der verallgemeinerten Koordinaten (2)
4. Bestimmen der virtuellen Verschiebungen
5. Bestimmen der Beschleunigungskomponenten
6. Formulieren der virtuellen Arbeit δW
7. Substituieren der virtuellen Verschiebungen (4) und der
Beschleunigungskomponenten (5) in die Gleichung δW = 0
8. Extrahieren der Bewegungsgleichungen aus (7) für δqi 6= 0
Prof. Dr. U. Zwiers
STME
23/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 9/16
Generalisierte Kräfte
Annahme: holonomes System
r i = r i (q1 , . . . , qf , t) ,
δr i =
f
X
∂r i
k=1
δWe =
∂qk
δqk ,
"N
f
X
X
k=1
∂r i
FT
i
∂qk
i=1
|
i = 1, . . . , N
i = 1, . . . , N
#
{z
}
= Qk
δqk
generalisierte Kraft
◦ Im Gleichgewicht sind alle generalisierten Kräfte gleich null.
◦ Die generalisierten Kräfte besitzen nicht notwendigerweise die
Dimension einer Kraft.
Prof. Dr. U. Zwiers
STME
24/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 10/16
Generalisierte Kräfte (Forts.)
Zur Bestimmung der generalisierten Kraft Qk wird die generalisierte
Koordinate qk variiert und die entsprechende virtuelle Arbeit δWek
bestimmt:
δWek
,
k = 1, . . . , f
Qk =
δqk
Allgemein gilt
Qk = Qk (q1 , . . . , qf , q̇1 , . . . , q̇f , t)
Wichtiger Sonderfall: (gewöhnliche) Potentialkräfte
Qk = −
∂Π
,
∂qk
Π = Π(q1 , . . . , qf , t)
Qk = Qk (q1 , . . . , qf , t)
Prof. Dr. U. Zwiers
STME
25/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 11/16
Lagrangesche Gleichungen 2. Art
N
X
1
mi vi2
Kinetische Energie: T =
2
i=1
Allgemeine Form der Lagrangeschen Gleichungen 2. Art
d ∂T
∂T
= Qk ,
k = 1, . . . , f
−
dt ∂ q̇k
∂qk
Gültigkeit: beliebige holonome Systeme
Lagrange-Funktion:
L=T −Π
Spezielle Form der Lagrangeschen Gleichungen 2. Art
d ∂L
∂L
= 0,
k = 1, . . . , f
−
dt ∂ q̇k
∂qk
Gültigkeit: holonome Systeme mit auschließlich Potentialkräften
Prof. Dr. U. Zwiers
STME
26/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 12/16
Lagrangesche Gleichungen 2. Art (Forts.)
Beispiel: Massenpunkt auf Parabelbahn
Bindungsgleichung
Φ = y − cx2 = 0
Kinetische Energie
1
1
T = mv 2 = m(ẋ2 + ẏ 2 )
2
2
Potentielle Energie
Π = mgy
m
Lagrange-Funktion
1
L = T − Π = m(ẋ2 + 4c2 x2 ẋ2 − 2gcx2 )
2
Bewegungsgleichung
ẍ(1 + 4c2 x2 ) + 4c2 xẋ2 + 2gcx = 0
Prof. Dr. U. Zwiers
y
STME
x
27/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 13/16
Lagrangesche Gleichungen 2. Art (Forts.)
Dissipation
Übergang einer umwandelbaren (entropiefreien) Energie in
(entropiebehaftete) Wärmeenergie
Wesentliche Reibungstypen
Haftreibung
FR ≤ FR,max = µ0 FN
Gleitreibung
F R = −µ FN
Rollreibung
Reibung in Fluiden
Prof. Dr. U. Zwiers
v
v
v
F R = −µR FN
v
1
v
F R = − cw Aρ v 2
2
v
STME
28/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 14/16
Lagrangesche Gleichungen 2. Art (Forts.)
Generalisierte Reibungskraft
QRk =
N
X
FT
Ri
i=1
∂r i
∂P
=−
∂qk
∂ q̇k
mit F Ri = −hi (vi )
vi
vi
vi
Dissipationsfunktion
P =
N Z
X
hi (v̄i ) dv̄i
i=1 0
Modifizierte Form der Lagrangeschen Gleichungen 2. Art
d ∂L
∂P
∂L
+
= 0,
k = 1, . . . , f
−
dt ∂ q̇k
∂qk
∂ q̇k
Gültigkeit: holonome Systeme mit Dissipation (Reibung)
Prof. Dr. U. Zwiers
STME
29/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 15/16
Lagrangesche Gleichungen 1. Art
p Bindungen
Φk (r 1 , r 2 , . . . , r N , t) = 0
N X
∂Φk T
∂r i
i=1
Reaktionskräfte
Ri =
p
X
k=1
λk
δr i = 0 ,
∂Φk
,
∂r i
k = 1, . . . , p
i = 1, . . . , N
Erste Form der Lagrangeschen Gleichungen 1. Art
mi r̈ i = F i +
p
X
k=1
λk
∂Φk
,
∂r i
i = 1, . . . , N
Gültigkeit: holonome und nichtholonome∗ Systeme
Prof. Dr. U. Zwiers
STME
30/35
Grundlagen der Analytischen Mechanik
Prinzipe der Mechanik 16/16
Lagrangesche Gleichungen 1. Art (Forts.)
p Bindungsgleichungen
Φk (q1 , q2 , . . . , q3N , t) = 0
3N
X
∂Φk
i=1
verallg. Reaktionskräfte
∂qi
Qi =
δqi = 0 ,
p
X
k=1
λk
∂Φk
,
∂qi
k = 1, . . . , p
i = 1, . . . , 3N
Zweite Form der Lagrangeschen Gleichungen 1. Art
p
∂ ∂L
∂L X ∂Φk
=
,
i = 1, . . . , 3N
λk
−
dt ∂ q̇i
∂qi
∂qi
k=1
Gültigkeit: holonome und nichtholonome∗ Systeme
Prof. Dr. U. Zwiers
STME
31/35
Grundlagen der Analytischen Mechanik
Analyse nichtholonomer Systeme 1/4
Systemeigenschaften
Räumliches System mit N Massenpunkten
p holonome Bindungen:
Φk = 0
mit Φk = Φk (q1 , q2 , . . . , q3N , t)
g nichtholonome Bindungen:
3N
X
aki q̇i + bk = 0
i=1
mit aki = aki (q1 , q2 , . . . , q3N , t)
bk = bk (q1 , q2 , . . . , q3N , t)
Die Anzahl der generalisierten Koordinaten eines räumlichen
Systems mit p holonomen und g nichtholonomen Bindungen beträgt
f = 3N − p
Prof. Dr. U. Zwiers
STME
32/35
Grundlagen der Analytischen Mechanik
Analyse nichtholonomer Systeme 2/4
Systemeigenschaften (Forts.)
f generalisierte Koordinaten: q1 , . . . , qf
kinematische Bindungen:
Bedingung für Holonomität:
ãT
k dq̃ = 0
ak1
..
ãk = .
akf
bk
dq1
..
, dq̃ = .
dqf
dt
∂ãkj
∂ãki
=
,
∂ q̃j
∂ q̃i
i, j = 1, 2, . . . , ℓ
ℓ = f + 1 rheonome Systeme
ℓ=f
Prof. Dr. U. Zwiers
skleronome Systeme
STME
33/35
Grundlagen der Analytischen Mechanik
Analyse nichtholonomer Systeme 3/4
Systemeigenschaften (Forts.)
Ein skleronomes System mit f ≤ 2 generalisierten Koordinaten ist
immer holonom.
Für die Anzahl der Bedingungen, die eine kinematische Bindung
erfüllen muss, damit sie integrierbar und damit holonom ist, gilt
ℓ!
ℓ
z=
=
3
3!(ℓ − 3)!
ℓ
z
Prof. Dr. U. Zwiers
1
0
2
0
3
1
4
4
5
10
6
20
STME
...
...
34/35
Grundlagen der Analytischen Mechanik
Analyse nichtholonomer Systeme 4/4
Bewegungsgleichungen mit Lagrangeschen Multiplikatoren
Die Bewegung jedes mechanischen Systems mit endlich vielen
Freiheitsgraden kann durch ein System von Differentialgleichungen
zweiter Ordnung beschrieben werden.
Bewegungsgleichungen für nichtholonome Systeme
g
X
d ∂T
∂T
µk aki = 0 ,
i = 1, . . . , f
− Qi −
−
dt ∂ q̇i
∂qi
k=1
f
X
aki q̇i + bk = 0 ,
k = 1, . . . , g
i=1
Prof. Dr. U. Zwiers
STME
35/35