NTS Kapitel 5: Inductives Verhalten
Werbung

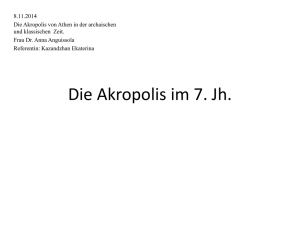
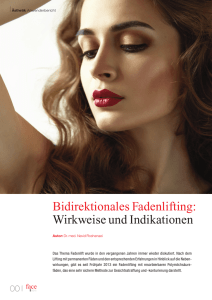
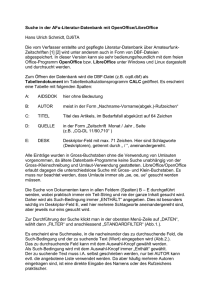
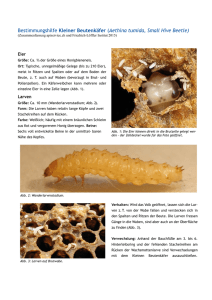
Kapitel 5 Induktives Verhalten Viele Transportvorgänge, zum Beispiel das Fliessen von Wasser oder von elektrischer Ladung, unterliegen einem Phänomen, das man Trägheit von Strömen nennen könnte: wenn sich die Ströme zeitlich ändern, so führt das zu beobachtbaren Phänomenen, zum Beispiel zu Verzögerungen beim Anfahren oder zu Schwingungen und Resonanz oder in ausgedehnten Systemen zu Wellen—das heisst zu Vorgängen, die in unseren bisherigen Betrachtungen und Modellen noch nicht vorgekommen sind. In RC -Modellen, die wir in den Kapiteln 2-4 konstruiert haben, springen Ströme verzögerungsfrei auf einen durch Druckdifferenz (Spannung) und Widerstand bestimmten Wert; zudem können dort kein Schwingverhalten und keine Wellenausbreitung vorkommen. Es braucht eben dieses zusätzliche Phänomen der Trägheit von Strömen. Schwingungen und Wellen werden ausführlich in Kapitel 17 und allgemeiner in Kapitel 19 studiert. Hier geht es zuerst um das Anfahren und Stoppen von Strömen und wie man dieses Phänomen in dynamische Modelle einbaut. Wenn man in diesen Modellen gleichzeitig Speicherelemente (kapazitive Elemente) hat, dann ergibt sich Schwingungsverhalten zwanglos, ohne dass wir uns schon mit der mathematischen Beschreibung dieses Verhaltens auseinandersetzten müssen. 5.1 Träge Ströme und schwingende Systeme Im Allgemeinen ist es nicht möglich, Ströme ohne Verzögerung an- oder abzuschalten; es braucht Zeit, sie zu ändern, und sie ändern sich graduell. Dieses Phänomen nennt man Induktion. Induktive Phänomene treten bei Fluiden, Elektrizität und Bewegung auf (bei thermischen und chemischen Prozessen braucht es spezielle Umstände, damit man Induktion beobachten kann). In diesem Kapitel studieren wir einige dieser Vorgänge am Beispiel hydraulischer und elektrischer Systeme. 5.1.1 Starten von Wasserströmen Ein einfacher Fall des Anfahrens eines (Wasser) Stromes ergibt sich, wenn man das dünne, horizontale Rohr bei einem dicken mit Wasser gefüllten Tank zuerst zuhält und dann plötzlich öffnet. Der Wasserstrahl verstärkt sich mehr oder weniger schnell—und nicht schlagartig—von einem Anfangswert von Null auf den Wert, den wir aufgrund unserer Diskussion in Kapitel 3 erwarten würde. Die Modelle, die wir bisher in Kapitel 3 für das Entleeren eines Gefässes oder die Dynamik von zwei kommunizierenden Gefässen gemacht haben, zeigen aber ein Verhalten wie in 152 Induktives Verhalten Abb.5.1 ergeben. Bei laminarer Strömung haben wir (5.1) IV (0) = 4pR (0) /RV wobei sich 4pR (0) durch die anfängliche Füllhöhe im Tank ergibt: 4pR (0) = −4pC (0). h Pipe is opened IV B A t t Abbildung 5.1: Wenn man das Rohr öffnet, sollte der Strom laut Widerstandsgesetz gleich auf den höchsten Wert springen. Etwas stimmt nicht mit dem Modell—real ergibt sich ein anderes Bild (Abb.5.2). Der Wasserstrahl aus dem Rohr des Tanks in Abb.5.1 wird langsam stärker. Er muss ja bei einem Wert von Null beginnen und erreicht erst später die Stärke, die wir typischerweise beobachten. ∆pAB 1 3 t Pipe is opened 2 4 IV 1 BBBBBBBBB BB B B B B B B 0 B 0 0.5 1 1.5 2 t/s Abbildung 5.2: Das horizontale Rohr an einem Wassertank wird plötzlich geöffnet: der Wasserstrahl wird immer stärker (Photos links). Das Öffnen des Rohres führt (fast) schlagartig zu einer Erhöhung der Druckdifferenz entlang des Rohres von Null auf den Wert pA − pB (Abb.5.1). Der Wasserstrom erhöht sich verzögert auf den Wert, den man aufgrund der Druckdifferenz erwarten könnte (Daten aus Video, rechts unten; relative Werte für die Stromstärke). Pumpe und horizontales Rohr. Betrachten wir Wasser in einem horizontalen Rohr, das durch eine Pumpe angetrieben wird (Abb. 5.3). Wir stellen die Pumpe an, sie baut eine Druckdifferenz 4pP auf, wir halten aber den Finger auf das Rohr bei B. Das Verhalten—das verzögerte Anfahren des Stromes—ist recht einfach zu verstehen. Am Anfang ist der Strom ja Null, das Wasser fliesst noch nicht. Es braucht eine Druckdifferenz entlang des Wassers im horizontalen Rohr (von A nach B in Abb.5.3), um es anzuschieben—weil das Wasser träg ist. Hinten (in Strömungsrichtung) muss der Druck höher sein als vorne. Das ist der Fall, wenn man den Finger vorne am Rohr wegnimmt. Hinten beim Tank (bei Punkt A) ist der Druck hoch, 5.1 Träge Ströme und schwingende Systeme 153 vorne beim Ausfluss (bei Punkt B) ist der Druck nun plötzlich gleich dem Luftdruck, also niedriger als bei Punkt A. Mit anderen Worten: entlang des Rohres von A nach B etabliert sich eine Druckdifferenz (Abb.5.3, oberes Diagramm). Pump A ∆pAB B IV pA pB t Fluid in Pipe IV Pipe is opened IV 1 2 pA pB t Building up of motion Abbildung 5.3: Wasser wird mit Hilfe eine Pumpe durch ein Rohr getrieben (links oben). Wenn die Pumpe eine feste Druckdifferenz aufbaut, wird entlang des Rohres von A nach B eine Druckdifferenz 4pAB im Wasser etabliert, sobald man das Rohr bei B öffnet (rechts oben). Damit ändert sich die Volumenstromstärke zeitlich von einem Wert gleich Null mit einer bestimmten Rate (recht unten). Das Prozessdiagramm unten links erklärt bildhaft, was passiert: im hydraulischen Prozess fliesst das Fluid von einem höheren zu einem tieferen Punkt, wodurch der induktive Prozess (Beschleunigung des Fluids, Aufbau von Bewegung) angetrieben wird. Nun wird das Wasser angeschoben, es beginnt zu fliessen, der Volumenstrom wird stärker – er ändert sich mit einer bestimmten Rate (Abb.5.3, Diagramm unten). Es ist anzunehmen, dass sich der Strom schneller ändert (Beispiel 1 im Diagramm unten in Abb.5.3), wenn die Druckdifferenz höher ist. Im einfachsten Fall können wir erwarten, dass die Änderungsrate des Volumenstroms proportional zu dieser Druckdifferenz ist: dIV ∼ 4pAB , dt t=0 f alls IV (0) = 0 (5.2) Wie schnell sich der Strom ändert, wird bei gegebener Druckdifferenz davon abhängen, wieviel Wasser in einem Rohr angeschoben wird. Ist das Rohr in Abb.5.3 doppelt so lang, so wird die anfängliche Änderungsrate vermutlich nur halb so gross sein (Beispiel 2 im Diagramm unten in Abb.5.3). Die Menge des Wassers wird also den Proportionalitätsfaktor in Gl.5.2 beeinflussen. Hydraulische Induktion und Trägheit der Bewegung Das induktive Verhalten einer Flüssigkeit beim Fliessen äussert sich also zum Beispiel in der Verzögerung beim Aufsetzen eines Stromes. Wir interpretieren dieses Phänomen als Folge der Trägheit der Bewegung des Fluids. Körper bewegen sich träge, weil sie Masse haben (siehe Kapitel 15). Konzepte 154 Induktives Verhalten Wie geht es nun weiter? Wenn der Strom stärker wird, steigt die Reibung, und dazu gehört ein steigender resistiver (widerstandsbehafteter) Druckabfall in Strömungsrichtung im Wasser. Anders gesagt, von der tatsächlichen (realen) Druckdifferenz in Strömungsrichtung ist nun ein Teil mit dem Strömen selber (und nicht mit der Veränderung des Stromes) verknüpft. Für die Veränderung des Stromes steht nur noch ein kleinerer Teil der Druckdifferenz von A nach B zur Verfügung. Als Folge verringert sich die Änderungsrate des Stromes: der Anstieg wird wie beobachtet langsamer (Abb.5.4, unten rechts, und reale Daten in 5.2, rechts unten). Das Verhalten beim beim Anfahren eines Volumenstroms in einem Rohr sollte also wie in Abb.5.4 gezeigt sein. ∆pAB Pump A B t Pipe is opened IV IV pA pB IV,max 1 2 t Abbildung 5.4: In Wirklichkeit geht der Strom langsam auf den höchsten Wert. Fall 1 und 2 unterscheiden sich z.B. durch die Länge des Rohres (und damit die Menge des Wassers, das angeschoben werden muss). Zwei Phänomene gleichzeitig in einem Element. Wir wissen nun, dass eine messbare Druckdifferenz entlang des Wassers in einem Rohr (zum Beispiel pA − pB in Abb.5.4) gleichzeitig mit zwei Vorgängen verbunden sein kann: (1) mit dem reibungsbehafteten Fliessen des Wassers und (b) der zeitlichen Änderung des Stromes. Wir machen uns die Vorstellung, dass sich die Druckdifferenz 4pAB = pB − pA auf die beiden Vorgänge aufteilt. Die beiden Vorgänge “kämpfen” sozusagen um ihrem Anteil an der Triebkraft 4pAB . Solange der Strom nicht zu stark und 4pR (die resistive Druckdifferenz ) nicht zu hoch ist, bleibt ein Teil für die Änderung des Stromes und umgekehrt. Der Teil, der mit der zeitlichen Veränderung des Stromes Verknüpft ist, heisst induktive Druckdifferenz 4pL . Konzepte Zwei konkurrierende Vorgänge in einem Element In einem Rohr mit Flüssigkeit können gleichzeitig zwei verschiedene Prozesse ablaufen. Entlang des Rohres—vom Eingang zum Ausgang—gibt es eine reale messbare Druckdifferenz. Die beiden im Rohr gleichzeitig ablaufenden Prozesse “teilen” sich diese reale Druckdifferenz: 4pAB = 4pR + 4pL (5.3) Sie sind einzeln nicht messbar, sie sind gedachte Grössen in einem Modell. Diese Idee lässt sich in einem Schaltungsbild (hydraulisch oder in elektrischer Analogie) verdeutlichen. Das Element, das aus Wasser und Rohr besteht, funktioniert, 5.1 Träge Ströme und schwingende Systeme 155 als ob es aus einem Widerstandselement und einem Induktionselement besteht, die hintereinander geschaltet sind. Die Druckdifferenz über beiden Teilen zusammen ist die Summe der Druckdifferenzen über den beiden Teilelementen (Abb.5.5). Pump SYSTEM SYSTEM Inductor IV pA Motion p* IV pB Heat pA pA Resistor ∆pL p* ∆pR pB IV pB ∆pAB = ∆pL + ∆pR Abbildung 5.5: Ein Fluid in einem (horizontalen) Rohr unterliegt zwei Prozessen: Reibung und Induktion. Das Phänomen ist von A nach B verteilt, aber wir modellieren die beiden Prozesse als aufeinander folgend. Zusammen machen 4pL und 4pL die ganze gemessene Druckdifferenz 4pAB von A nach B aus. Das Prozessdiagramm unten links symbolisiert, was in den beiden Prozessen passiert. In beiden fliesst das Fluid von einem höheren zu einem tieferen Druck. Als Folge wird im induktiven Element Bewegung “angeschoben”, im resistiven Element wird Wärme erzeugt. 1. In welchem Punkt sind die bisherigen (RC ) Modelle des Entleerens eines Tanks oder der Wechselwirkung von zwei kommunizierenden Gefässen nicht realistisch? Ist das Modell des Füllens eines Tanks mit Hilfe einer Pumpe vom gleichen Problem betroffen? 2. Warum kann im Modell des Angleichs von Flüssigkeitsniveaus (wie in Abb.2.10) kein Über- oder Unterschwingen um das Gleichgewichtsniveau vorkommen? 3. Zeigt das Beispiel des Windkesselmodells in Abb.3.24 oder Abb.4.3 nicht Schwingungen? 4. Wenn wir beim Phänomen der Induktion bei hydraulischen Vorgängen von Trägheit eines Stromes reden, worin besteht diese Trägheit? 5. Wie hoch ist die Druckdifferenz von A nach B in Abb.5.4, wenn das Rohr geschlossen ist? Was passiert mit dieser Druckdifferenz, wenn man das Rohr öffnet? 6. Wie hoch ist die Druckdifferenz von Punkt A nach Punkt B im Rohr in Abb.5.4? Hängt sie davon ab, wie stark der Volumenstrom gerade in einem Moment ist? Oder davon, wie schnell sich der Strom ändert? 7. Wodurch wird IV,max in Abb.5.4 bestimmt? 8. Funktioniert die Trägheit eines Fluids auch, wenn man plötzlich die Pumpe im Beispiel von Abb.5.4 abstellt? Wie sollte sich das bemerkbar machen? Ist Gl.(5.4) immer noch anwendbar? 9. In Kapitel 13 (Abb.13.1 und 13.7) kommt ein geneigtes Wasserrohr vor. Inwiefern ist die Situation ähnlich wie bei einem horizontalen Rohr, bei dem Reibung und Induktion (Trägheit) vorkommen? Gibt es im geneigten Rohr auch zwei Vorgänge, die sich eine reale Druckdifferenz teilen? Fragen & Übungen 156 Induktives Verhalten 10. Stellen Sie sich vor, das Rohr in Abb.5.4 sei gerade geöffnet worden. Wie hoch ist die induktive Druckdifferenz in dem Moment? Wie hoch ist die resistive Druckdifferenz? 11. In einem horizontalen Rohr ruht eine Flüssigkeit. Wovon wird es abhängen, wie schnell sich der Volumenstrom beim Anfahren gerade am Anfang ändert? 12. Sollte in Gl.(5.4) bei weggelassenem Betragszeichen ein Minus-Zeichen auftreten? Konzepte Hydraulisches induktives Verhalten Induktives Verhalten äussert sich in der Verknüpfung von zwei Aspekten. Zum einen ändert sich ein Strom zeitlich, zum anderen gehört, wie bei jedem Phänomen, eine Potentialdifferenz dazu. Die induktive Potentialdifferenz ist mit der zeitlichen Rate, mit der sich der Strom ändert, direkt verknüpft. Nur die induktive Druckdifferenz 4pL wird für die Änderung des Volumenstroms verantwortlich gemacht. Im einfachsten Fall sind induktive Druckdifferenz und Änderungsrate des Stromes proportional zu einander: dIV 1 (5.4) dt = LV 4pL Den Faktor LV nennt mann (hydraulische Induktivität – sie ist ein Mass für die Trägheit des hydraulischen Elementes. Die Beziehung zwischen induktiver Druckdifferenz und der Änderungsrate des Volumenstroms kann grafisch in einem characteristischen Diagramm dargestellt werden: dIV dt Symbol of inductor IV ∆pL ∆pL Hydraulische Induktion ist mit der Trägheit der Bewegung eines Fluids verbunden. Was hinter dem Aufbau oder Abbau von “Bewgung” steckt, wird in Kapitel 15 besprochen. 5.1.2 Starten und Stoppen von elektrischen Strömen Was wir bei Wasser beobachten, sollte eigentlich auch bei elektrischen Phänomen auftreten: Ströme sollten beim Schliessen eines Stromkreises mehr oder weniger langsam auf den maximalen Wert gehen und nicht (wie in Abb.5.6) ohne Verzögerung auf diesen Wert springen. Und wenn wir bei fliessender elektrischer Ladung plätzlich die Spannungsquelle wegnehmen (abschalten), so sollte die Ladung mindestens noch eine Weile weiter fliessen. Wenn wir einen einfachen Stromkreis mit einer Spannungsquelle (zum Beispiel einer Batterie) und einem Widerstandselement (und Drähten) betrachten, dann ergeben unsere bisherigen Modelle UR (t) = US (t) (5.5) 5.1 Träge Ströme und schwingende Systeme 157 1 UR (t) (5.6) R wobei UR (t) die Spannung über dem Widerstandselement ist. Wenn die beiden Spannungen in unserem Beispiel konstant sind, dann sollte sich nach diesem Modell ein Verhalten wie in Abb.5.6 ergeben. IQ (t) = UR + IQ Close circuit Close circuit IQ R US UR t t Abbildung 5.6: Wenn man den Stromkreis schliesst, springt die Stromstärke auf den Wert, den man mit dem Widerstandsgesetz berechnet. Das ist unrealistisch. Praktisch ist das Modell, wie unsere Erfahrung zeigt, aber trotzdem sehr gut brauchbar. Offensichtlich muss die elektrische Stromstärke so schnell auf den bisher berechneten Wert springen, dass wir in einem normalen Experiment nichts von der Verzögerung merken. Wenn man aber einen langen Draht zu einer Spule windet (Abb.5.7) und wenn möglich noch einen Eisenstab in die Spule steckt, dann zeigen sich sehr deutliche Verzögerungen mit der Spule im Stromkreis. Experiment. Im folgenden Experiment kann man messen, was passiert. Eine Spule wie in Abb.5.7 wird mit einem (externen) Widerstandselement (mit konstantem Widerstand von 40.0 Ω) und einem Generator zu einem einfachen Stromkreis zusammengesetzt (Schaltungsdiagramm links in Abb.5.8). Die Spannungen über dem externen Widerstandselement UR,ext und über der Spule Usol werden gemessen (sol steht für den englischen Ausdruck für Spule: solenoid). Man sieht das Resultat im Diagramm rechts in Abb.5.8. Dabei wurde bei 1.0 s der Generator auf 5.50 V eingeschaltet und bei 3.7 s wieder abgeschaltet. Man sieht, dass sich beim Einschalten und Abschalten der Generatorspannung US die Spannungen verzögert zu stationären Werten hin verändern; die Zeitkonstante der Änderung beträgt gut 0.25 s. + Solenoid Solenoid US USol IQ IQ,max t Abbildung 5.7: Links: Drahtspule. Rechts: Photographie einer Drahtspule (aus einem langen Kupferdraht gewickelt) mit einem Eisenstab im Innern. Der Eisenstab ist zu einem geschlossenen Joch ergänzt. Rechts: Spannungsquelle und Spule: wird die Spannungsquelle angeschaltet, ändert sich die elektrische Stromstärke langsam auf den durch den Drahtwiderstand gegebenen Wert. Analyse des Experimentes. Die beiden gemessenen Spannungen müssen zusammen die Generatorspannung von 5.50 V (nach 1.0 s) oder 0 V (nach etwa 3.7 s) 158 Induktives Verhalten 6 UR,ext A + US 2 UR,ext 0 USol Solenoid USol 4 Voltage / V Rext -2 B 0 4 2 6 Time / s Abbildung 5.8: Beobachtung von Spannungen über einer Spule und einem externen Widerstandselement. Der Generator wird an- und abgeschaltet. ergeben, was sie auch tun. Dann sehen wir, dass die Spannung über dem externen Widerstandselement gleich nach dem Anschalten (bei 1 s) immer noch Null ist und sich langsam auf einen Wert von etwa 2.15 V erhöht—die Form der Kurve ist die bekannte exponentielle Anpassung an einen neuen stationären Wert. Die Spannung UR,ext misst indirekt die Stärke des Ladungsstroms durch den (unverzweigten) Stromkreis: 1 IQ = UR,ext (5.7) Rext Wir können daraus und aus den Messergebnissen schliessen, dass der elektrische Strom sich verzögert an die schlagartig geänderte Spannungslandschaft anpasst (Diagramm rechts in Abb.5.9). Nach 3.7 s sinkt dann die Stromstärke exponentiell (nicht schlagartig!) mit einer Zeitkonstante von 0.25 s auf Null. Die Verzögerungen sehen mathematisch nach erster Ordnung mit einer Zeitkonstante von 0.25 s aus (siehe verzögerte Reaktion der Spannung eines Kondensators auf eine schlagartige Veränderung der Spannung eines Generators, Kapitel 4). Man spricht auch von der Sprungantwort des Systems auf die sprunghafte Veränderung. UR,ext + US 0.06 A Current / A IQ Rext Solenoid 0.04 0.02 USol 0 B 0 2 4 6 Time / s Abbildung 5.9: Die Spannung über dem externen Widerstandselement erlaubt uns, die Stromstärke im Stromkreis zu berechnen. Da wir nun die Stromstärke durch den ganzen Stromkreis, also auch durch den langen Draht, aus dem die Spule gemacht ist, kennen, können wir beginnen, die Vorgänge in der Spule zu verstehen. Betrachten wir zuerst die stationären Phasen, zum Beispiel die erste von etwas nach 2 s bis etwa 3.7 s. Da sich dort der Strom nicht verändert, spielt offensichtlich das neue Phänomen der zeitlichen Veränderung von Strömen keine Rolle. Wir haben einfach einen langen Draht aus Kupfer, durch 5.1 Träge Ströme und schwingende Systeme 159 den die Elektrizität gleichmässig fliesst. Der Kupferdraht stellt also ein Leiterelement (Widerstandselement) dar. Da wir die Spannung über diesem Leiterelement für diese Phase kennen (Usol = URS = 3.44 V), können wir den zugehörigen elektrischen Widerstand des langen Kupferdrahtes berechnen: RS = URS 3.44 Ω = 63.8 Ω = IQ 5.39·10−2 Würden wir die Spule als einfaches Widerstandselement betrachten (was wir aber im Allgemeinen auf keinen Fall dürfen), dann würde zum Strom durch den Draht mit dem eben berechneten Widerstandswert eine Spannung URS gehören (siehe die Kurve im Diagramm in Abb.5.10, die bei Null beginnt und die gleiche From wie die Stromstärke in Abb.5.9 hat). Die Spannung über der Spule ist aber anders, sie entspricht der gemessenen Kurve, die bei 1 s direkt auf 5.50 V springt (Diagramm in Abb.5.10). UR,ext 6 Usol Voltage / V 4 IQ URS 2 URS UL + A Rext UL L 0 Usol = UL + URS Usol -2 US UL -4 URS RS B -6 0 2 4 6 Time / s Abbildung 5.10: Von den drei Kurven im Diagramm links ist eine gemessen (Usol , diejenige, die bei 1 s von Null auf 5.5 V springt). Die anderen beiden sind berechnet: URS aus IQ und UL als die Differenz zwischen Usol und URS . Im Schaltungsdiagramm rechts ist nun die Spule als Serieschaltung von zwei gedachten Elementen dargestellt—einem resistiven und einem induktiven Element. Was bedeutet nun die Differenz zwischen der über der Spule gemessenen Spannung und der durch das Widerstandsverhalten des Drahtes berechneten Spannung UL = Usol − URS ? Offensichtlich ist das der Fehler, den wir machen, wenn wir die Spule als reines resistives Element behandeln. Eine Spannung bedeutet gefühlsmässig und auch praktisch, dass etwas passieren kann und wohl auch wird. Der “Fehler” in unserem bisherigen Widerstandsmodell für die Spule heisst also, dass die Spannung UL mit einem Vorgang verknüpft ist, den wir nicht berücksichtigt haben. Die Spule kann also mehr, als wir ihr bisher zugetraut haben. Die Differenz der tatsächlichen Spannung über der Spule (Usol ) und der Spannung URS (die mit dem Widerstandsverhalten zusammen hängt), tritt immer dann auf, wenn sich die Stromstärke durch die Elemente und Drähte des einfachen Stromkreises zeitlich ändert. Das suggeriert den Gedanken, dass UL irgendwie mit dem Änderungsvorgang zusammenhängt. Wenn wir als Mass für den neuen Vorgang messen, wie schnell sich der Strom ändert, so erhält man eine Kurve, die man durch Multiplikation mit einem Faktor ähnlich wie UL aussieht (Abb.5.11). Das bedeutet, dass wir erwarten können, dass ein Modell der Form dIQ ∼ UL dt (5.8) 160 Induktives Verhalten uns weiter helfen wird und die Phänomene beim Anfahren oder Stoppen von Strömen weitgehend erklärt. Wir werden sehen, dass diese Idee tatsächlich funktioniert, bei einer Spule ohne Eisenkern sogar fast perfekt. [ [ [ [ [ [ [[ [ [ [ [[ [ [ [ [[ [ [ [ [ [ [[ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ 4 Voltage / V [ 2 0 0.2 UL 0.1 dIQ/dt 0.0 [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [[ [ [ [ [ [ [ [[ [ [ [ [ [[ [ [ [ [ [ -2 -4 -6 0 2 4 dIQ /dt / A/s 6 -0.1 -0.2 6 Time / s Abbildung 5.11: Die Daten von UL und von dIQ /dt (berechnet aus IQ (t)durch numerische Differentiation und Glättung sind (bis auf einen Skalenfaktor) fast deckungsgleich, das heisst, wir können in erster Näherung annehmen, dass die beiden Grössen ungefähr proportional zueinander sind. Konzepte Induktives elektrisches Verhalten Induktives Verhalten äussert sich in der Verknüpfung von zwei Aspekten. Zum einen ändert sich ein Strom zeitlich, zum anderen gehört, wie bei jedem Phänomen, eine Potentialdifferenz dazu. Die induktive Potentialdifferenz ist mit der zeitlichen Rate, mit der sich der Strom ändert, direkt verknüpft. Wie in der Hydraulik kann man den Zusammenhang grafisch in einem charakteristischen Diagramm darstellen. IQ dIQ dt IQ UL t dIQ ~ UL dt Symbol of inductor UL Elektrischen Induktion und Magnetismus. Das Phänomen der hydraulischen Induktion haben wir mit der Trägheit der Flüssigkeit in Verbindung gesetzt, und die Trägheit hat mit dem Phänomen der Bewegung (Kapitel 13) zu tun. Wenn ein Fluid durch eine induktive Druckdifferenz “bergab” fliesst, so treibt sie die Bewegung des Fluids an. Diese Interpretation ist im Prozessdiagramm in Abb.5.3 visualisiert worden. Bei elektrischer Induktion geht es nicht um Bewegung, sondern um Magnetismus. Die Tatsache, dass man die induktive Wirkung durch einen zu einer Spule gewundenen langen Draht und zusätzlich noch mit einem Eisenkern in der Spule massiv verstärken kann, deutet auf die Kopplung mit Magnetismus hin. So kann man das dann auch deuten (Abb.5.12): Wenn elektrische Ladung durch ein induktives Element mit der zugehörigen induktiven Spannung “von oben nach unten” fliesst, dann 5.1 Träge Ströme und schwingende Systeme 161 treibt der elektrische Strom die Bildung eines magnetischen Feldes (in der Spule) an. Verstärkt sich der Strom, so wird das Magnetfeld stärker. Umgekehrt wird beim Abbau des Magnetfeldes, das durch eine Schwächung des elektrischen Stromes begleitet ist, eine negative elektrische Spannung UL induziert. Der elektrische Strom fliesst dann bildlich “bergauf”, die Ladung wird gepumpt. Charge in Solenoid Charge in Solenoid IQ IQ ϕ1 ϕ2 Building up of magnetic field Building down of magnetic field ϕ2 ϕ1 Abbildung 5.12: Elektrische Induktion ist mit Magnetismus verknüpft (oben: Visualisierung des magnetischen Feldes in einer Spule mit Hilfe von Eisenfeilspänen suggeriert, dass die Spule, durch die Elektrizität fliesst, ein (Elektro-)Magnet ist). Die Trägheit der Elektrizität ist nicht die selbe wie bei (materiallen) Körpern. Vielmehr ist sie die Folge des Aufbaus oder Abbaus eines Magnetfeldes, das einen elektrischen Strom begleitet. 13. Warum gilt die Beziehung in Gl.(5.5) für die Schaltung in Abb.5.6? 14. Wie ändern sich die experimentellen Daten im Diagramm in Abb.5.8, wenn man den Widerstandswert des externen Widerstandselementes vergrössert? 15. Wie bestimmt man am schnellsten den Widerstandswert des Drahtes, aus dem die Spule im Experiment in Abb.5.8 gemacht ist? Der Wert für den externen Widerstand ist bekannt. 16. Wie müsste das Diagramm für die Stromstärke in Abb.5.9 aussehen, wenn die Spule keine induktive Eigenschaft hätte? 17. Man kann die induktive Spannung bei einer Spule nicht (direkt) messen. Wie muss man vorgehen (Messungen und Berechnungen), um UL doch zu bestimmen? 18. Welche Beobachtung suggeriert, dass die Änderungsrate der elektrischen Stromstärke bei einem induktiven Effekt proportional zur induktiven Spannung sein könnte? 19. Nehmen Sie an, die Änderungsrate des elektrischen Stromes sei beim induktiven Effekt proportional zur induktiven Spannung. Welche Bedeutung hat dann der Proportionalitätsfaktor in der Gleichung dIQ /dt = a UL ? 20. Worin besteht die “Trägheit” der Elektrizität? Was für eine Beobachtung suggeriert, dass elektrische Induktion etwas mit Magnetismus zu tun hat? 21. Wenn elektrische Ladung durch einen geraden Draht fliesst, so baut sich um ihn ein Magnetfeld auf. Heisst das, dass auch der Transport von Ladung durch einen geraden Draht dem Phänomen der Induktion unterliegt? Fragen & Übungen 162 5.1.3 Induktives Verhalten Die induktive Zeitkonstante Das zeitliche Verhalten beim Anfahren eines Stromes sieht gleich wie das des Füllens eines Tanks in einem linearen Modell aus. Die Anfahrkurve ist eine sich einem neuen stationären Wert anpassende zerfallende Exponentialfunktion. Wir haben solches Verhalten durch eine Zeitkonstante beschrieben (Kapitel 3.4, Box 3.2.2, Kapitel 4.5). Da es sich bisher um kapazitiv-resistives Verhalten handelte, nennt man die dort eingeführte Grösse eine kapazitive Zeitkonstante. In Analogie dazu verwenden wir nun eine induktive Zeitkonstante. Im Beispiel des Diagramms in Abb.5.13 ist das die Zeitspanne, in der der Strom vom Anfangswert auf etwa 63% des Endwertes steigt (analog: die Zeitspanne, die einem unveränderten anfänglichen Anstieg auf den Endwert entspricht—was man durch die Konstruktion der Tangente am Anfang erhält). Um die induktive von der kapazitiven Zeitkonstante zu unterscheiden, schreiben wir τL anstelle von τC . Wir können uns überlegen, von welchen Grössen des Systems die Zeitkonstante abhängen muss. Die Flüssigkeit im Rohr ist durch zwei Systemgrössen gekennzeichnet: Widerstandswert und Induktivität. Wenn die Induktivität, die ja ein Mass der Trägheit des Stromes darstellt, wächst, so sollte die Zeitkonstante länger werden. Wenn der Widerstand grösser ist, dann wird die sich im stationären Zustand einstellende Stromstärke kleiner, also sollte das Niveau früher erreicht werden: die Zeitkonstante muss kürzer werden. Im einfachsten Fall ergäbe das τL = LV RV (5.9) Diese Beziehung gilt in analoger Form auch in der Elektrizität (die elektrische Induktivität hat die Einheit Henry, H). Dass diese Beziehung für ein lineares System stimmt, wird weiter unten bewiesen. IV / m3/s 0.5·10–4 0.63·0.5·10–4 0 0 1 1.5 2 t/s τL Abbildung 5.13: Grafische Definition und Bestimmung der Zeitkonstante des verzögerten Anstiegs des Stromes (Verzögerung erster Ordnung, exponentieller Angleich an das neue Niveau). Fragen & Übungen 22. Wie gross ist die induktive Zeitkonstante beim Anfahren des Wasserstroms in Abb.5.2? Entsprechen die Daten einer zerfallenden Exponentialfunktion? 23. Die Stromstärke als Funktion der Zeit in Abb.5.13 stammt vom Anfahren des Was- serstroms aus einem Tank mit einem Radius von 0.125 m. Das Wasser stand am Anfang 50 cm hoch. Wie gross ist die Induktiviät des Wassers im Rohr? 24. Wie gross sind die induktiven Zeitkonstanten des Anfahrens und Stoppens des elek- trischen Stromes in Abb.5.9 (vergrösserte Ausschnitte unten)? Sollten die beiden Werte gleich gross sein? Sind das die selben Zeitkonstanten wie in Abb.5.11? 5.1 Träge Ströme und schwingende Systeme 0.06 Current / A Current / A 0.06 0.04 0.02 0 0.75 163 0.04 0.02 0 1 1.25 1.5 1.75 Time / s 2 2.25 3.5 3.75 4 4.25 4.5 4.75 Time / s 5 25. Wie sieht das Stromstärke-Zeit Diagramm beim Anfahren eines elektrischen Stromkreises (mit Spannungsquelle, die bei t = 1.0 s auf 5.0 V gestellt wird (vorher null), und Spule mit elektrischem Widerstand von 2.0 Ω und Induktivität von 2.0 H) aus? 5.1.4 Trägheit von Strömen und Schwingungen Schwingungsverhalten ist direkt mit dem Phänomen der Trägheit von Strömen verbunden – es braucht induktives Verhalten, damit Schwingungen auftreten können. Tatsächlich sind in den bisher in den Kapiteln 3 und 4 untersuchten Fällen von hydraulischen und elektrischen Systemen gar keine Schwingungen möglich. In einem RC System wie den beiden Tanks mit Schlauch in Abb.3.1 ist die Stromstärke des Wassers immer direkt proportional zum Unterschied der Füllhöhen (Drücke) in den beiden Tanks. Sobald die hydraulische Spannung zwischen den beiden Speichern Null geworden ist, ist auch die Stromstärke Null, und die ganze Dynamik stoppt. Es gibt kein Überschwingen, wie es für eine Schwingung nötig wäre. In diesem Kapitel wird nur kurz gezeigt, dass die Kombination von Speichern mit trägen Strömen tatsächlich zu Schwingungen führt. Schwingungsverhalten wird dann erst in Kapitel 17 eingehend studiert. Flüssigkeit in einem U-Rohr. Hydraulische Schwingungen kann man sehr einfach bei Flüssigkeiten in einem U-Rohr beobachten (Abb.5.14). Lenkt man die Flüssigkeit aus, so dass sie am Anfang im einen Schenkel höher steht als im anderen, dann führt das Fliessen zu einer Schaukelbewegung. Level / mm 440 420 400 380 360 0 5 10 15 Time / s 20 Abbildung 5.14: Wenn man anstelle von zwei kommunizierenden Tanks mit dünnem Verbindungsrohr ein U-Rohr verwendet, schaukelt die Flüssigkeit (Quecksilber) hin und her. Im Diagramm rechts sieht man eine gedämpfte Schwingung: gemessen wurde die Füllhöhe in einem der Schenkel des U-Rohrs als Funktion der Zeit. Das Phänomen fängt mit einem Strom von Null an, der Strom nimmt zu, das Niveau im einen Schenkel nimmt ab und im anderen zu. Wenn dann die beiden Niveaus gleich geworden sind, stoppt der Vorgang nicht wie bei unseren Beispielen mit zwei Tanks und einem dünnen Verbindungsrohr (Kapitel 3) – der Flüssigkeitsstrom ist 164 Induktives Verhalten nicht Null sondern (sozusagen) maximal. Also geht das Fliessen weiter, das Niveau im ersten Schenkel geht unter die Gleichgewichtslage, das Niveau im anderen Schenkel geht darüber hinaus. Erst wenn im zweiten Schenkel die Füllhöhe (fast) so hoch wie anfänglich im ersten ist, stoppt der Strom momentan, aber nur um umzukehren. Erklärung. Das System mit einer Flüssigkeit in einem U-Rohr entspricht im Wesentlichen dem von zwei miteinander verbundenen Tanks (Abb.3.1 und 5.15). Also besteht es aus zwei Speicherlementen (zwei kapazitiven Elementen) und einem Widerstandselement. Das alleine würde aber die in Abb.5.14 beobachtete Schwingung nciht erklären, vielmehr würden wir wieder den einfachen Vorgang eines einmaligen Angleichens der Niveaus an das Gleichgewichtsniveau beobachten. Also muss es zur Erklärung noch ein anderes Modellelement im System geben, nämlich ein induktives. Abbildung 5.15: Eine Flüssigkeit in einem U-Rohr verhält sich im Wesentlichen wie in einem System aus zwei mit einem Schlauch verbundenen Tanks. Wenn wir annehmen, dass das Fliessen der Flüssigkeit nicht nur der Reibung (Widerstandsverhalten) sondern auch der Trägkeit (induktives Verhalten) unterliegt, dann kann man die Beobachtungen verstehen. Jeder Schenkel des U-Rohrs ist ein Tank, die Menge der Flüssigkeit im jeweiligen Schenkel führt zum Druck der Flüssigkeit am Boden, was man als Druckunterschied an einer gedachten Trennfläche am untersten Punkt interpretieren kann. Diesen Druckunterschied machen wir ganz am Anfang für das Anfahren des Stroms verantwortlich. Die Flüssigkeit im U-Rohr stellt gleichzeitig zur Speichermenge auch das fliessende Fluid dar. Wenn dieses träge ist, dann braucht es eben einen Druckunterschied, damit sich der Strom überhaupt ändern kann. Die erste Phase des beobachteten Vorgangs entspricht im Wesentlichen dem Anfahren eines Wasserstroms wie in Abschnitt 5.1.1 besprochen. Wenn der Strom stärker wird, nimmt die Reibung einen wachsenden Anteil an der Druckdifferenz. Wenn wir zur vereinfachung der Situation annehmen, dass die Wirkung der Reibung klein ist, dann wächst der Strom im Prinzip ungehindert weiter. Der Unterschied zwischen den beiden Beispielen besteht nun aber darin, dass durch die Änderung der Flüssigkeitsmengen in den beiden Schenkeln zur selben Zeit die treibende kapazitive Druckdifferenz abnimmt. Die für die Änderung des Stromes zur Verfügung stehende Druckdifferenz wird niedriger, der Strom ändert sich immer langsamer. Schliesslich sind die Niveaus gleich geworden, und der Strom kann in dem Moment nicht mehr stärker werden. Der entscheidende Punkt ist nun, dass das Fluid im Gleichgewicht (Gleichheit der Flüssigkeitsniveaus) fliesst; der Strom hat sogar ein Maximum erreicht. Also überschiesst die Flüssigkeit, die treibende Druckdifferenz ändert ihr Vorzeichen (und nimmt dem Betrage nach zu). Also wird der Strom schwächer, bis die Flüssigkeit zu stehen kommt, wenn sie im zweiten Schenkel die maximale Höhe erreicht hat. Von da an geht es in umgekehrter Richtung weiter. Zusammenfassend kann man also sagen, dass wir für die Beobachtungen, dass die 5.1 Träge Ströme und schwingende Systeme 165 Flüssigkeit am Anfang nicht fliesst und angeschoben werden muss, und dass der Strom bei gleichen Flüssigkeitsniveaus links und rechts nicht Null ist, als Erklärung das Phänomen der Trägheit der fliessenden Flüssigkeit brauchen. Das zu modellierende System ist also kein RC System sondern ein RCL System. Tatsächlich braucht es für Schwingungen Speicher und Induktoren, CL Systeme wären also genügend. Aber beim Fliessen einer Flüssigkeit spielt Reibung immer auch eine Rolle, also sind die Systeme, die uns interessieren, im Allgemeinen aus Speichern (C), Induktoren (L) und Widerstandslementen (R) aufgebaut. Ein elektrischer Schwingkreis. Das selbe Verhalten sieht man, wenn man eine Spule zwischen zwei Kondensatoren in einen einfachen Stromkreis steckt (Abb.5.16), und wie schon so oft sind die Erklärungen für die hydraulischen und die elektrischen Systeme analog. Wenn sich die Spule einfach wie ein Widerstandselement verhalten würde, so ergäbe es wieder keine Schwingung. Wir kennen das Verhalten aus Kapitel 4.1, Abb.4.1). Es ist genau gleich wie bei zwei Tanks mit einem dünnen Rohr dazwischen. 4 Solenoid C2 Usol UC2 UC / V C1 UC1 3.5 R L 3 2.5 2 1.5 0 0.01 0.02 0.03 Time / s 0.04 0.05 Abbildung 5.16: Eine Spule ohne Eisenkern zwischen zwei (verschieden) geladenen Kondensatoren (C1 = 60 µF, C2 = 95 µF) führt zu einer Schwingung der elektrischen Grössen. Im Diagramm rechts sieht man die gemessenen Spannungen über den beiden Kondensatoren. Die Tatsache, dass es eine Spule braucht—und dass ein Eisenkern in der Spule den Effekt verstärkt—deutet darauf hin, dass Induktion an der Schwingung Schuld ist. Nun hatten wir beim Anfahren von Strömen auch schon mit Induktion zu tun, aber es gab keine Schwingungen. Deshalb ist induktives Verhalten nur die halbe Miete: es braucht auch noch Speicher (kapazitives Verhalten), damit eine fluidartige Grösse wie elektrische Ladung oder Volumen hin- und herpendeln kann. Wie im hydraulischen Fall sind schwingfähige Systeme CL Systeme oder allgemeiner RCL Systeme – im Allgemeinen ist das Widerstandsverhalten immer mit dabei. Blutkreislauf und Schwingungen. Ein wichtiges schwingendes System haben wir in unserem Körper: den Blutkreislauf. Wenn man den Druck des Blutes in der Aorta, die das Blut aus der linken Herzkammer als erstes aufnimmt, misst, so erhält man rhythmisch veränderliche Werte. Das alleine ist noch nicht ein Hinweis auf ein induktives Verhalten. Dass es aber genau dazu kommt, sieht man, wenn man den Blutstrom in der Aorta nahe an der linken Herzkammer misst (Diagramm oben rechts in Abb.5.17). Die Tatsache, dass der Blutstrom kurzzeitig ein wenig negativ wird, ist aber ein untrügerisches Zeichen für die Trägheitswirkung der Flüssigkeit in der Aorta. Der Blutkreislauf dient als ein sehr schönes Beispiel für die Kraft der Analogiebetrachtung. Wenn wir uns den Blutkreislauf als hydraulisches System mit Speichern, 166 Induktives Verhalten Pumpen und Rohren, die sowohl resistives als auch induktives Verhalten ermöglichen, dann kann man hydraulische Modelle als analoge elektrische Modelle darstellen. Man kann zum Beispiel Schaltungen bauen, die physisch eine Rolle analog zum realen Blutkreislauf spielen. Dynamische Computermodelle der elektrischen Schaltungen sind dann analog zu dynamischen Modellen für den Blutkreislauf (oder auch für im Labor gebaute physische Modelle eines Blutkreislaufs mit Pumpen, Speichern, Schläuchen und Ventilen). 300 Pulmonary circuit Capillaries Heart (right) Flow / ml/s 200 Aorta Arteries IV 100 0 Heart (left) Veins -100 0 Systemic circuit Capillaries 0.2 US C1 É É IV / m3/s RS C2 É É 1.0E-4 É É É É É É IQ É É 0.0E+0 IQ IV ÉÉ ÉÉ 2.0E-4 L 0.8 1 3.0E-4 Solenoid R1 0.4 0.6 Time / s É ÉÉÉÉÉÉÉÉÉÉÉÉÉÉ ÉÉ R2 É ÉÉ É É É É É É É É É É É É É É ÉÉÉÉÉÉÉÉÉÉÉÉÉÉ ÉÉ É ÉÉÉ ÉÉÉ ÉÉÉÉÉÉÉÉÉ ÉÉÉÉÉÉÉÉÉ É É É É É É ÉÉÉ -1.0E-4 0 0.2 0.4 0.6 Time / s 0.8 1 Abbildung 5.17: Das Blut, das aus der linken Herzkammer in die Aorta ausgestossen wird, fliesst dort hin und her (hauptsächlich vorwärts, ein wenig zurück; Blutstrom im Diagramm oben rechts). Eine elektrische Schaltung, mit der man das System aus linker Herzkammer, Aorta und Körperblutgefässen modelliert, führt auf einen schwingenden Strom ähnlich wie der Blutstrom (IQ als ausgezogene Linie im Diagramm unten rechts im Vergleich zu den Daten des Blutstroms). Fragen & Übungen 26. Warum gibt es in RC Systemen keine Schwingungen? 27. Wenn man einem Tank mit Ausfluss Wasser rhytmisch zuführt, so schwingt der Wasserstand. Warum bilden Tank, Schlauch, Zufuhr und Wasser trotzdem kein schwingendes System? 28. Warum kommt es bei den Beispielen von zwei mit einem Schlauch verbundenen Tanks in Kapitel 2 und 3 nicht zu Schwingungen, obwohl das System im Wesentlichen gleich wie ein U-Rohr ist? 29. Welcher Prozess führt dazu, dass die Amplitude der Schwingung in Abb.5.14 mit der Zeit abnimmt? 30. In einem U-Rohr schwingt eine Flüssigkeit wenigstens eine Weile lang. Ist es möglich, dass eine Flüssigkeit in einem U-Rohr trotzdem nicht schwingt? Ist es möglich, in einem schwingfähigen System die Parameter so einzustellen, dass das System zum Gleichgewichtszustand hin “kriecht”? 5.2 Dynamische Modelle und Simulationen 167 31. Wasser schwingt in einem U-Rohr. Zu einem bestimmten Zeitpunkt sind die Füllhö- hen in den beiden Schenkeln zum ersten Mal gleich. Wie gross ist dann die kapazitive Druckdifferenz zwischen den beiden Schenkeln? Heisst das, dass das Fluid dann nicht fliesst? 32. Woran sieht man in den Daten in Abb.5.16, dass die beiden Kondensatoren nicht die gleiche Kapazität haben? Welcher Kondensator hat die Grössere Kapazität? 33. Welche Systemeigenschaften werden gebraucht, dass es zu Schwingungen kommt? (Widerstand? Kapazität? Induktivität?) 34. Was für Veränderungen in den gemessenen Daten in Abb.5.16 erwarten Sie, wenn Sie (a) die Kapazität beider Kondensatoren vergrössern, (b) den Widerstandswert des Spulendrahtes vergrössern, (c) eine Spule mit grösserer Induktivität nehmen? 35. Zeichnen Sie von Hand so genau wie möglich ein Diagramm, das alle vier Spannungen entsprechend dem Schaltungsdiagramm in Abb.5.16 als Funktionen der Zeit enthält. Überzeugen Sie sich über die Zusammenhänge zwischen diesen Grössen. 36. Wie muss das analoge elektrische Schaltungsdiagramm für das U-Rohr in Abb.5.14 aussehen? Induktion Transporte (Volumen in der Hydraulik, elektrische Ladung in der Elektrizität, Impuls und Drehimpuls bei Translations- und Rotationsbewegungen, Entropie bei thermischen Vorgängen) unterliegen einer Art “Trägheit”: ein Strom ändert sich nicht einfach so, sondern seine Änderung ist mit einer zugehörigen Potentialdifferenz verbunden: dI (5.10) 4ϕL = −L dt Man nennt das Phänomen Induktion und die zugehörige Potentialdifferenz induktive Potentialdifferenz. L nennt man die Induktivität eines Elementes; sie misst die Trägheit des Phänomens. Das Minuszeichen bedeutet, dass ein in Stromrichtung abnehmendes Potential zu einer Verstärkung des Stromes führt. 5.2 Dynamische Modelle und Simulationen In diesem Abschnitt werden ein paar dynamische Modelle für Beispiele aufgebaut, die wir vorher diskutiert haben. Damit sollten wir ein vertieftes Verständnis der Zusammenhänge—der Grundideen—und des konkreten Verhaltens von Systemen, speziell von schwingungsfähigen, erhalten. Im folgenden Abschnitt wollen wir durch Simulation ein wichtiges Phänomen untersuchen, nämlich das der Resonanz. 5.2.1 Wasserstom anfahren Als erstes dynamisches Modell erstellen wir eines für das Anfahren eines Wasserstroms wie in Abb.5.2. Die Daten stammen von einem Tank mit dünnem horizontalen Rohr. Die anfängliche Füllhöhe des Wassers im Tank beträgt 0.28 m, also haben wir gleich nachdem das Rohr geöffnet wird eine Druckdifferenz von 4pAB = −2800 Pa entlang des Rohres. Die Messungen haben einen maximalen Konzepte 168 Induktives Verhalten Volumenstrom von ziemlich genau 5.0·10−5 m3 /s ergeben. Daraus und aus den Messungen in Abb.5.18 folgern wir, dass die Änderungsrate des Volumenstroms gleich am Anfang etwa dIV 5.0·10−5 m3 /s m3 ≈ = 1.7·10−4 2 dt 0.30 s s betragen muss. Da wir uns vorstellen, dass diese Änderungsrate vom Unterschied des Druckes des Wassers am Ende und am Anfang des Rohres herrührt und im einfachsten Fall wie in elektrischen Stromkreisen proportional zu dieser ist, können wir mit folgender Idee anfangen: 1 dIV =− 4pL dt LV (5.11) 4pL ist am Anfang gerade gleich hoch wie die Druckdifferenz 4pAB = −2800 Pa entlang des Rohres. LV nennen wir die hydraulische Induktivität der Flüssigkeit im Rohr, das verwendet wurde. Sie misst die Trägheit des Systems beim Anfahren (generell beim Ändern) des Stromes. Mit den vorhandenen Daten können wir LV abschätzen: 2 −2800 Pa·s2 4pL 7 Pa·s ≈− = 1.7·10 LV = − dIV /dt m3 1.7·10−4 m3 Das Diagramm eines systemdynamischen Modells für das Anfahren des Stromes kann in einem erstem Schritt wie in Abb.5.18 rechts aufgebaut werden. Der wichtigste neue Aspekt kommt gleich am Anfang: das Induktionsverhalten führt nicht—wie andere konstitutive Gesetze—auf eine algebraische Beziehung (zum Beispiel zwischen Strom und Druckdifferenz wie beim resistiven Verhalten) sondern auf eine differentielle. Wir stellen uns vor, dass die induktive Druckdifferenz zur Änderungsrate der gesuchten Grösse (Stromstärke) führt. Uns interessiert aber natürlich die Stromstärke selber. Aus diesem Grund brauchen wir im Modell zusätzlich die Darstellung der Integration der Änderungsrate des Stromes, wobei die Änderungsrate durch die Induktionsbeziehung in Gl.(5.11) gegeben ist. IV / m3/s 0.5·10–4 B BB B B B B B B B BB B B B B B 0 B 0 0.5 1 1.5 2 t/s Abbildung 5.18: Erster Schritt im Aufbau eines dynamischen Modells zum Anfahren eines Wasserstroms (rechts). Links sehen wir die schon in Abb.5.2 gezeigten Daten mit der grafischen Bestimmung der Änderungsrate des Stromes am Anfang. Die anderen Teile dieses ersten Modells sind sehr einfach. Eine Pumpe (oder in einem Tank gespeichertes Wasser) setzt eine konstante Druckdifferenz auf. Diese ist gleich der (negativen) Druckdifferenz 4pAB entlang des Rohres, und da wir im ersten Schritt Reibung vernachlässigen, ist diese gleich der induktiven Druckdifferenz: 4pL = 4pAB − 0 = −4ppump − 0 5.2 Dynamische Modelle und Simulationen 169 Die Simulation des beschriebenen Modells führt auf eine steigende Gerade, die bei guter Wahl des Wertes für die Induktivität der Tangente an die Messwerte am Anfang (wenn der Strom anfängt zu fliessen) entspricht. Ein Modell, das den ganzen Anfahrvorgang des Wassers im horizontalen Rohr darstellt, muss nur noch durch den Vorgang der Reibung (Widerstandsverhalten, Strömungsverhalten) ergänzt werden (Abb.5.19). Wenn wir der Einfachheit halber annehmen, die Strömung sei laminar, haben wir: 4pR = −RV IV (5.12) 4pL = 4pAB − 4pR (5.13) Mit haben wir dann das vollständige Modell. Eine Simulation mit LV = 15·106 Pa·s2 /m3 und RV = 55·106 Pa·s/m3 ergibt das im Diagramm in Abb.5.19 (rechts) gezeigte Resultat, das den gemessenen Daten sehr gut entspricht. IV / m3/s 0.5·10–4 B BB B B B B B B B BB B B B B B 0 B 0 0.5 1 1.5 2 t/s Abbildung 5.19: Zweiter Schritt im Aufbau eines dynamischen Modells zum Anfahren eines Wasserstroms (links) und Simulationsergebnis (durchgezogene Linie) und Datenpunkte im Diagramm rechts. Integration oder Bilanzierung? Konzepte Die Integration einer Änderungsrate muss in systemdynamischen Programmen durch eine Reservoir-Strom Konstruktion dargestellt werden. Das sieht auf den ersten Blick wie die Darstellung einer Bilanzbeziehung aus, ist aber keine solche—hier wird nicht bilanziert sonder einfach direkt integriert. Die Mathematik ist zwar die selbe, aber die Bedeutung ist vollkommen anders. 37. Welcher Teil des Diagramms des dynamischen Modells in Abb.5.19 repräsentiert die konstitutive Beziehung für das Induktionsverhalten? 38. Wie unterscheidet sich in einem Diagramm eines systemdynamischen Modells die Darstellung einer Bilanz von der einer reinen Integration? 39. Kann man (im Prinzip) jede (zeitliche) Funktion integrieren? Kann man jede Grösse bilanzieren? 40. Wie gross ist die Zeitkonstante im Modell in Abb.5.19? 41. Wie würde sich die Funktion in Abb.5.19 ändern, wenn die Induktivität der Flüssigkeit zwei mal so gross wäre? Fragen & Übungen 170 5.2.2 Induktives Verhalten Anfahren und Stoppen von elektrischen Strömen Das Modell für das in Abb.5.8 gezeigte Experiment sollte im Prinzip genau gleich wie jenes in Abb.5.19 aussehen. Der einzige strukturelle Unterschied besteht darin, dass wir zwei Widerstandselemente statt nur eines haben (Abb.5.20); und natürlich haben die Variablen andere Namen, und die Parameter haben andere konkrete Werte. 6 [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ Voltage / V 4 2 0 [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ -2 -4 0 4 2 6 Time / s Abbildung 5.20: Modelldiagramm (links), Daten (Punkte im Diagramm) und Simulation des Modells (durchgezogene Linien) beim Starten und Stoppen eines elektrischen Stromes. Mit Hilfe des elektrischen Stromes bestimmen wir die beiden resistiven Spannungen UR,ext und URS : UR,ext = Rext IQ (5.14) URS = Rsol IQ (5.15) Aus dem Maschensatz erhalten wir die Spannung über der Spule und daraus schliesslich die induktive Spannung: Usol = US − UR,ext (5.16) UL = Usol − URS (5.17) Eine Simulation mit L = 21.4 H ergibt dann das im Diagramm rechts in Abb.5.20 zu sehende Resultat. Es stimm im ersten Teil des Vorgangs sehr gut mit den Daten überein, nach dem Abstellen der Spannungsquelle aber nicht mehr ganz so gut. Das rührt daher, dass eine Spule mit einem Eisenkern drin komplexer funktioniert, als wir bisher angenommen haben. Wenn man die Änderungsrate des Stromes in einem Diagramm gegen die Induktive Spannung aufträgt, so ergibt sich kein einfaches Bild wie in Abb.5.19 (rechts): die Beziehung ist nicht linear (man kann sie zum Beispiel durch ein Polynom dritten Grades annähern). 5.2.3 Elektrisches Windkesselmodell mit Spule In Abschnitt 5.1.4 wurden Beobachtungen des Schwingungsverhaltens von Blut an einer Stelle in der Aorta eines Schafes beschrieben, Blut strömt, durch die linke Herzkammer angetrieben, durch die Aorta-Klappe (ein Rückschlagventil) in die elastische Aorta und von dort in den Körper. Im Kapitel über hydraulische Systeme (Abschnitt 3.2.4) wurde ein ganz einfaches Windkesselmodell vorgestellt, das in der Physiologie als Grundlage der Erklärung 5.2 Dynamische Modelle und Simulationen 171 der Funktion der Aorta dient. Eine Pumpe drückt eine Flüssigkeit durch ein Rückschlagventil in einen Speicher. Von dort fliesst sie durch einen langen Schlauch in die Umgebung. Ein elektrisches System, das zum hydraulischen Windkessel analog ist, wurde in Abb.4.3 dargestellt und in Abschnitt 4.2.3 modelliert. Diese Modelle zeigen ganz grob ein ähnliches Verhalten wie das Blut im systemischen Körperkreislauf. Box 5.1: Integration im Diagramm eines dynamischen Modells Eine beliebige Funktion der Zeit y (t) kann in systemdynamischen Programmen mit Hilfe einer Flow-Reservoir Konstruktion integriert werden. Der Flow enthält y (t), das Reservoir das dazugehöroge Integral. Wenn wir die Änderungsrate dY /dt einer Funktion Y (t) integrieren, so erhalten wir wieder Y (t): ˆ t (dY /dt) dt Y (t) = Y (0) + 0 Y(0) Y(t) dY/dt Das Modelldiagramm für die Integration sieht im Wesentlichen gleich wie das für ein Bilanzgesetz aus, weil in einem Bilanzgesetz die Änderungsrate einer Speichergrösse durch die Summe aller Ströme gegeben ist. Beim Modell handelt es sich um ein RC-Modell, das aber keine Schwingungen darstellen kann. Um diese nachzubilden, müssen wir die Trägheit des Blutes in der Aorta abbilden: das Blut schaukelt hin und ein wenig her. Um die Trägheit des Blutstromes in der Aorta in ein Modell einzubauen, sollte man die Aorta in mindestens zwei Speicher zerlegen, damit im Modell ein Strom zwischen diesen Speichern das Fliessen in der Aorta nachbilden kann (Abb.5.21, links). Wir wollen nun ein elektrisches Modell des hydraulischen Windkessels mit zwei Speichern und einem induktiven Element aufbauen (Abb.5.21, rechts). Aorta R1 Left ventricle R2 UR2 Arteries and capillaries Aortic valve US UC1 C1 RS L IQ Solenoid C2 R3 Abbildung 5.21: Hydraulisches Windkesselmodell mit zwei Speichern (links) und analoge elektrische Schaltung (rechts) mit Spannungsquelle, Diode, Spule und Widerstandselementen. Das Widerstandselement R2 dient indirekt der Messung des elektrischen Stromes durch die Spule. Das Modell des zentralen Teils der Windkesselschaltung (mittlere Masche in der Schaltung in Abb.5.21, rechts) ist bis auf das zusätzliche externe Widerstandselement (R2 ) identisch mit dem vorher aufgebauten. Die neuen Teile bestehen im 172 Induktives Verhalten Wesentlichen aus einem (Zu)Fluss zum Reservoir für Q1 und einem (Ab)Fluss für Q2 (Abb.5.22). Der Zufluss wird durch das Widerstandselement R1 reguliert: IQ1 = UR1 /R1 . Die Spannung UR1 ergibt sich aus dem Maschensatz für die linke Masche der Schaltung: UR1 = US − UD − UC1 . Um die Schaltung ähnlich wie den Blutkreislauf funktionieren zu lassen, wir die Spannung US über der Spannungsquelle von Hand so reguliert, dass sie etwa wie der Druck in der linken Herzkammer aussieht (siehe Kurve links unten in Abb.5.22). Die Spannung UD über der Diode setzen wir auf einen festen Wert (etwa 0.7 V), und die Funktion der Diode wird indirekt modelliert, indem man den elektrischen Strom IQ1 Null setzt, wenn UR1 negativ wird. Die Spannung über dem Kondensator ergibt sich auf die bekannte Weise und ist schon im vorhergehenden Modell enthalten. Die Dritte Masche rechts in Abb.5.21 wird durch den (Ab)Fluss IQ3 modelliert. Der ist sehr einfach durch den Maschensatz und die konstitutive Beziehung für das Widerstandselement R3 zu erhalten UR3 = UC2 IQ3 = UR3 /R3 [ [ [ [ [ [ [ [ [ [ [[ [[ [ [ [ [[ [[ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ Abbildung 5.22: Diagramm des dynamischen Modells für die elektrische Schaltung in Abb.5.21. US ist die externe treibende Funktion des Modells. Damit ist das Modell vollständig und kann simuliert werden. Die Ergebnisse für die Spannungen über den Kondensatoren und über R2 (indirekte Messung von IQ2 ) passen gut zu den gemessenen Daten (Abb.5.23). Die Parameter, die durch die Anpassung an die Daten erhalten werden, stimmen mit auf anderen Wegen gemessenen gut überein (L = 20 H, siehe Abschnitt 5.2.2; C1 = C2 = 480 µF; UD = 0.80 V). Einzig der elektrische Widerstand der Spule stimmt nicht mit dem statisch gemessenen überein: wir brauchen RL = 120 Ω (anstelle von RL = 63 Ω), damit die Simulation funktioniert. 5.2 Dynamische Modelle und Simulationen 173 0.006 4 [ [ [ [ [ [ [ [ U [ [ [ S [[ [[ [ [ [ [X [X X X X [ X X X[ X X X[ UC2 X XX [ X [ [ X [ [ [ [ [ [ X [[ X UC1 [ X X X[ X[ [ [[ X [X X [ [ [ X X X X X X X X X X X X X X X X X X X X X X X [ X [ X X X X X X [ [ X [ X [ [ X X X [ X X X [ X X [ X [ X [ [ X X X [ [ X X X [ X [ [ X [ X X [ X [ X X X [ [ X [ X X [ X X [ [ [ [ X X X [ X X X [ X [ X X [ X X X X [ X [ X X X [ [ X X [ [ X [ X [ [ X [ X [ [ X [ X [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ U/V 2 1 0 0.004 IQ / A 3 [ [ [ [ [ [ [ [ [ [[ [[ [ [[ [[ [[ [[ I [ [[ Q [[ [ [[ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [[ [[ [ [ [ [ [ [ [ [ [ [[ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [[ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ 0.002 0 -0.002 -1 5 6 7 5 8 6 7 8 Time / s Time / s Abbildung 5.23: Daten und Simulationsergebnisse für das Modell aus Abb.5.22. Links: Gemessene Spannungen (US wird als Input für das Modell verwendet) und Simulationsergebnis für UC1 (ausgezogene Linie) im Vergleich zu den Messwerten (Punkte für UC1 ). Rechts: Daten für IQ2 = UR2 /R2 und Simulationsergebnis. 5.2.4 Laden eines Kondensators über eine Diode In Abschnitt 4.2.3 ist beim Versuch, das charakteristische Verhalten einer Diode in einem dynamischen Modell einzubauen, auf eine Schwierigkeit stösst: der direkte Ansatz führt auf eine unerlaubte Zirkelbeziehung (Abb.4.11). Mathematisch gesprochen heisst das, dass im Modell eine (nichtlineare) algebraische Beziehung entsteht, die spezielle numerische Methoden erfordert, die in vielen Werkzeugen zur Erstellung von dynamischen Computermodellen nicht implementiert werden. Ein Problem der selben Art tritt auf, wenn wir einen photovoltaischen Generator in einem elektrischen Schaltkreis modellieren wollen. Ein weiteres Beispiel ist das Problem der Umschaltung zwischen laminaren und turbulenten Strömungen von Fluiden. Im einfachsten Fall macht man das Kriterim für das Umschlagen von laminar zu turbulent oder umgekehrt von einer Bedingung abhängig, in der die Geschwindigkeit des Fluids vorkommen – das führt dann zu einer Zirkelbeziehung im Modell. Zirkelbeziehungen sind in dynamischen Modellen normal – allerdings nur, wenn sie eine Rate enthalten, die integriert wird. Das ist bei den bisher aufgetretenen Rückkopplungskreisen der Fall. Graphisch gesprochen heisst das, dass ein Kreis eine Konstruktion aus Flow und Reservoir enhalten muss (Abb.5.24). C B C B A A Abbildung 5.24: Eine direkte zirkuläre Beziehung zwischen einigen normalen Variablen ist nicht erlaubt (links). Enthält eine Kreisbeziehung mindestens eine Flow-Reservoir Konstruktion, so ist sie erlaubt. Modellierung der Diode. Man könnte nun einfach eine Flow-Reservoir Beziehung 174 Induktives Verhalten in den unerlaubten Kreis in Abb.4.11 einbauen und mit diesem mathematischen Trick das Problem erledigen. Es wäre allerdings befriedigender, wenn wir eine physikalische oder systemische Erklärung für das Problem finden könnten. Tatsächlich ist es so, dass die charakteristischen Beziehungen (resistive und kapazitive) eine Art Gleichgewichts- oder statinonäre Beziehung darstellen, wenn sich also zum Beispiel bei Transporten die Ströme nicht mehr änder. Ändern sie sich, müssten wir sowieso induktives Verhalten mit einbeziehen. Es macht also physikalisch Sinn, die Diode als kombiniertes Leitungs- und induktives Element zu modellieren (im oberen Zweig des Schaltungsdiagramms in Abb.5.25 oben links dargestellt). Gibt man der Diode (oder genereller der Schlaufe, in der sich die Diode befindet) ein induktives Element, dann ändert sich der Teil des dynamischen Modells, mit dem die elektrische Stromstärke im entsprechenden Zweig berechnet wird. Anstadt das Leitungsverhalten des Widerstandselementes wie in Gl.(4.14) direkt zu nutzen, wird die Stromstärke indirekt über die Integration der Änderungsrate des Stromes berechnet. Diese folgt aus dem Verhalten des induktiven Elementes: 1 d IQ = ULD dt L (5.18) Diese Teil des Modells ist im Diagramm recht in Abb.5.25 (eingekreist) zu sehen. Der Schritt von der Änderungsrate des Stromes zur Stromstärke (Integration der Änderungsrate) ist in Box 5.2.3 beschrieben. Das Modell muss nun durch die Berechnung der induktiven Spannung erweitert werden. Diese erhält man aus der Beziehung zwischen allen Spannungen im Stromkreis: ULD = US − UC − UR − UD L UD (5.19) R UR ULD UC US IQ C IQ / mA 60 40 20 0 US U/V 6 Inductive relation and integration of rate of change of current 4 UC 2 0 0 2 4 6 8 10 Time / s Abbildung 5.25: Schaltungsdiagrtamm für das Laden eines Kondensators über ein Widerstandselement und eine Diode (oben links). Die diode wird als kombiniertes Element (Leiter und Induktor) modelliert. Rechts: Systemdynamisches Modelldiagramm für die Schaltung. Unten links: Simulation mit gepulster Spannung des Generators. Die Spannung über dem Kondensator ergibt sich wie gewohnt: UC = 1 Q C (5.20) 5.2 Dynamische Modelle und Simulationen 175 und die Spannung über dem Widerstandselement folgt aus der Umkehrung der üblichen Transportbeziehung: UR = R IQ (5.21) Den Ausdruck für die Spannung über der Diode erhält man durch die Umkehrung der Funktion IQ (UD ) aus Gl.(4.16), die sich algebraisch bewerkstelligen lässt: 1 1 UD = ln IQ + 1 (5.22) b a Numerische Probleme. Das Modell ist damit komplett, es kann simuliert werden. Allerdings ergeben sich dabei in vielen Fällen ernsthafte numerische Probleme, die man geeignet lösen muss. Auf den ersten Blick ist nicht klar, was passier. Wir wissen, dass die Stromstärke nicht negativ werden sollte – die Diode lässt die Ladung nur in die eine Richtung durch. Die Beziehung Gl.(5.22) oder Gl.(4.16) sollte zumindest verhindern, dass die Stromstärke unter den sehr kleinen Wert −a fällt. Das sollte sich auf das Laden des Kondensators so gut wie nicht auswirken. Das Problem ist, dass numerische Verfahren, mit denen die Stromstärke durch Integration aus der Änderungsrate bestimmt werden, für die Gegebenheiten unseres Modells nicht stabil sind. Die Gleichungen des Modells, die die Änderungen der Variablen beschreiben, werden in Computermodellen numerisch Schritt um Schritt gelöst. In unserem Modell passiert es sehr leicht, dass der Wert des Stromes bei der Intgegration negativ wird. Im einfachsten Fall berechnet die Software aus einem Wert des Stromes den nächstfolgenden (einen kleinen Zeitschritt 4t später) nach der Regel IQD,i+1 = IQD,i + dIQ /dt · 4t (5.23) Diese Rechenregel, mit der aus einem alten Wert einer Variablen ein neuer erzeugt wird, nennt man explizite Euler Methode. Neben dieser einfachen Methode gibt es sehr viele auch sehr viel bessere (genauere, stabilere und effizientere) Methoden zur Lösung von Anfangswertproblemen (siehe Kapitel 10). Das Problem passiert beim Abstellen der Generatorspannung, worauf der Strom auf Null sinken sollte. Ist IQD,i schon fast Null, und ist dIQ /dt relativ stark negativ, dann wird IQD,i+1 negativ. Das kann man auch nicht verhindern, wenn man zum Beispiel die Bedingung einfügt, dass dIQ /dt = 0 gesetzt werden soll, wenn IQD,i < 0. Dann ist das Problem nämlich schon passiert, IQD,i hat einen (viel zu) negativen Wert, und die folgenden Rechnungen funktionieren nicht mehr. Man muss deshalb in einem Programm wie Berkeley Madonna dafür sorgen, dass der Wert von IQD nicht negativ werden kann. Eine Form, das zu verhindern, ist die folgende Bedingung für dIQ /dt: ( IF (IQD + U LD /L ∗ DT > 0) THEN dIQ /dt = ULD /L (5.24) ELSE dIQ /dt = −c IQD /DT DT ist dabei der Zeitschritt, der von der numerischen Methode zur Berechnung eines nachfolgenden Wertes gewählt wird. Man testetmit der Bedingung, ober der neue zu erwartende Wert für IQD , d.h. IQD,i+1 , positiv bleiben wird. Wenn ja, dann wendet man die normale Berechnung der Änderungsrate des Stromes mit Hilfe des Induktionsbeziehung an. Wenn nein, dann berechnet man einen neuen Wertnach einer Regel, die den Strom exponentiall auf Null fallen lässt. Man sieht dieses Verhalten in dem vergrössert gezeigten Ausschnitt im Diagramm für IQ in Abb.5.25. Die dort gezeigte Berechnung wurde mit einem Wert von c = 1 in Gl.(5.24) durchgeführt. Macht man c grösser, so sinkt IQ schneller auf Null ab. 176 Induktives Verhalten Noch mehr numerische Probleme. Dabei handelt man sich aber ein generelles numerisches Problem ein, das in unserem Modell sowieso auftritt: Es gibt bestimmte Änderungen, die sehr schnell erfolgen. Aus rein physikalichen (materiellen) Gründen sollte man die Induktivität der Diode sehr klein machen. Damit treten aber sehr schnelle Änderungen der Stromstärke speziell beim Ein- und Ausschalten von Teilen einer elektrischen Schaltung. Einfache numerische Methoden, wie die in Gl.(5.23) beschriebene, funktionieren in Fällen, wo bei der Simulation von Modellen gleichzeitig sehr schnelle und (relativ) langsame Änderungen auftreten, nicht mehr – sie werden instabil. Man braucht dafür angepasste Methoden, die man numerische Methoden für steife Differentialgleichungen nennt. (In BM ist so eine Methode, die Rosenbrock Methode, eingebaut.) Für unser Modell bedeuten all die erwähnten Schwierigkeiten, dass man erstens die Bedingung nach Gl.(5.24) einbauen muss, dass c nicht zu gross und L nicht zu klein gewählt werden dürfen, und dass man eine Methode für steife Differentialgleichungen verwenden muss. 5.3 Konzepte und Beziehungen ... ... Quellen Induction and Oscillation Lecture notes and books · Fuchs H. U. (2010): The Dynamics of Heat. Springer, New York, Chapter 1.6. · Fuchs H. U. (1995): Inductive Phenomena and Oscillations. Chapter 3 of Lecture Notes FEHM. · Hydraulic ram. http://en.wikipedia.org/wiki/Hydraulic_ram. 5.3 Konzepte und Beziehungen 177 Aufgaben 42. Water is at rest in a pipe. As the tap is opened, the pressure difference along the pipe is 2.0 bar. Initially, the current of water increases at a rate of 2.0 liters/s2. a) How large is the inductance of the water in the pipe? b) How fast would the current rise initially if the pipe were twice as long? 43. Water is flowing out of a slender tank through a straight horizontal pipe as in Fig.3.3. The pipe has a length of 1.75 m, and a radius of 2.0 mm. Initially, the level of water in the tank is 0.20 m. The graphs in Fig.3.7 show the modeled behavior of the system with and without taking inductance into account. The flow is laminar at all times. a) Estimate the inductance and the resistance of the fluid in the pipe. b) Estimate the inductive and resistive pressure differences for t = 20 s. c) Determine the function IV(t) after a fairly long time (t > 10 s), and calculate the cross section of the tank. d) Determine the total pressure difference along the pipe at t = 20 s, and estimate the volume of water in the tank at that moment. b. 8E–6 Volume flux / m3/s Volume flux / m3/s a. 8E–6 6E–6 4E–6 2E–6 6E–6 4E–6 2E–6 0E–6 0E–6 0 10 20 30 40 0 1 3 2 4 5 t/s t/s 44. In Example 3.2, a) determine the inductive time constant by graphical means. b) Compare the result to a determination with the help of Eq.(3.6). c) If the fluid level in the tank could be kept constant, how long would it take for the current to reach 99% of its final value? 45. Consider the electric circuit shown in the diagram. An ideal inductor is connected in series to a resistor, having a resistance of 24 W, and both are connected in parallel to another resistor (72 W). Together the three elements are connected to a battery of constant voltage (12 V). At t = 0 s the circuit is closed. a) Give a qualitative sketch of the inductive voltage, i.e. the voltage across the solenoid, as a function of time. Determine the maximum value of the voltage. b) Give a qualitative sketch of the current through the first of the resistors. What is the maximum value of the current? c) Sketch the current through the battery as a function of time. IQ + R1 R2 US L 178 Induktives Verhalten 46. Pipes having a diameter of 0.60 m lead from an artificial lake down into the valley. Their length is 350 m. a) What is the hydraulic inductance of a single pipe? b) Water is flowing through a pipe with a current of 1.0 m3/s. If the current had to be stopped in 0.10 s, how large would the induced pressure difference be? 47. A long wire is wound up in series on two cardboard pipes. The first has a length of 20 cm and a diameter of 6.0 cm, while the length and the diameter of the second are 10 cm and 4.0 cm, respectively. On the first cardboard pipe, there are 200 windings, on the second there are 300. Determine the inductance of the setup. 48. . . . 49. . . . Antworten zu Fragen und Übungen 1. In welchem Punkt sind die bisherigen (RC ) Modelle des Entleerens eines Tanks oder der Wechselwirkung von zwei kommunizierenden Gefässen nicht realistisch? Ist das Modell des Füllens eines Tanks mit Hilfe einer Pumpe vom gleichen Problem betroffen? Antwort: Die Trägheit des Fluids wurde bisher vernachlässigt – in den Modellen kommen keine induktiven Elemente vor. 2. Warum kann im Modell des Angleichs von Flüssigkeitsniveaus (wie in Abb.2.10) kein Über- oder Unterschwingen um das Gleichgewichtsniveau vorkommen? Antwort: Weil die Trägheit des Fluids vernachlässigt wird. Darum ist die Stromstärke direkt von der Druckdifferenz entlang des Rohres abhängig – sie und damit der Strom hat immer das selbe Vorzeichen. Wenn die Druckdifferenz Null geworden ist, ist auch die Stromstärke Null geworden, und es geht nicht weiter. 3. Zeigt das Beispiel des Windkesselmodells in Abb.3.24 oder Abb.4.3 nicht Schwingungen? Antwort: Nei, das sind keine Schwingungen, sondern einem nicht schwingfähigen RC Modell von aussen aufgezwungene rhythmische Veränderungen. 4. Wenn wir beim Phänomen der Induktion bei hydraulischen Vorgängen von Trägheit eines Stromes reden, worin besteht diese Trägheit? Antwort: Wenn man das Fliessen von Wasser als mechanisches Phänomen (Bewegung im Raum) interpretiert, dann wird die Trägheit durch die Masse des Fluids gemessen. Andere Interpretations (siehe Kapitel 6): Um einen Fluidstrom anzufahren, braucht es Energie, und um diese bereit zu stellen, braucht es eine (induktive) Druckdifferenz. 5.3 Konzepte und Beziehungen 179 5. Wie hoch ist die Druckdifferenz von A nach B in Abb.5.4, wenn das Rohr geschlossen ist? Was passiert mit dieser Druckdifferenz, wenn man das Rohr öffnet? Antwort: Sie ist so hoch wie die Druckdifferenz über der eingeschalteten Pumpe. Im ersten Moment nach Öffnen des Rohres treibt diese Druckdifferenz den Wasserstrom an. Danach teilt sie sich auf – für Beschleunigen und für Reiben. Zeitlich bleibt sie (gesamthaft) konstant. 6. Wie hoch ist die Druckdifferenz von Punkt A nach Punkt B im Rohr in Abb.5.4? Hängt sie davon ab, wie stark der Volumenstrom gerade in einem Moment ist? Oder davon, wie schnell sich der Strom ändert? Antwort: Sie ist immer so hoch wie die Druckdifferenz über der Pumpe. 7. Wodurch wird IV,max in Abb.5.4 bestimmt? Antwort: Durch Druckdifferenz über Pumpe, das heisst auch von A nach B, und durch den Strömungswiderstand. 8. Funktioniert die Trägheit eines Fluids auch, wenn man plötzlich die Pumpe im Beispiel von Abb.5.4 abstellt? Wie sollte sich das bemerkbar machen? Ist Gl.(5.4) immer noch anwendbar? Antwort: Es wird eine Druckdifferenz von umgekehrtem Vorzeichen (gegenüber Anfahren) induziert. Gleichung gilt in allgemeiner Form (ohne Betragszeichen). 9. In Kapitel 13 (Abb.13.1 und 13.7) kommt ein geneigtes Wasserrohr vor. Inwiefern ist die Situation ähnlich wie bei einem horizontalen Rohr, bei dem Reibung und Induktion (Trägheit) vorkommen? Gibt es im geneigten Rohr auch zwei Vorgänge, die sich eine reale Druckdifferenz teilen? Antwort: Ja, Reibung und Gravitation. 10. Stellen Sie sich vor, das Rohr in Abb.5.4 sei gerade geöffnet worden. Wie hoch ist die induktive Druckdifferenz in dem Moment? Wie hoch ist die resistive Druckdifferenz? Antwort: Induktive Druckdifferenz: maximal (gleich Druckdifferenz von A nach B); resistive Druckdifferenz: Null. 11. In einem horizontalen Rohr ruht eine Flüssigkeit. Wovon wird es abhängen, wie schnell sich der Volumenstrom beim Anfahren gerade am Anfang ändert? Antwort: Von der Menge Fluid im Rohr und vom Querschnitt des Rohres (formal: Dichte des Fluids, Länge des Rohres, Querschnittfläche des Rohres). 12. Sollte in Gl.(5.4) bei weggelassenem Betragszeichen ein Minus-Zeichen auftreten? Antwort: Ja. 13. Warum gilt die Beziehung in Gl.(5.5) für die Schaltung in Abb.5.6? Antwort: Maschensatz (es hat nur zwei Elemente in der Schaltung). 14. Wie ändern sich die experimentellen Daten im Diagramm in Abb.5.8, wenn man den Widerstandswert des externen Widerstandselementes vergrössert? Antwort: Der Wert von UR,ext im statinären Zustand geht höher hinauf, der von Usol hinunter. 15. Wie bestimmt man am schnellsten den Widerstandswert des Drahtes, aus dem die Spule im Experiment in Abb.5.8 gemacht ist? Der Wert für den externen Widerstand ist bekannt. Antwort: Rsol = Rext ·Usol (∞) /UR,ext (∞). 16. Wie müsste das Diagramm für die Stromstärke in Abb.5.9 aussehen, wenn die Spule keine induktive Eigenschaft hätte? Antwort: Springt bei t = 1 augenblicklich auf den Maximalwert und dann kurz vor t = 4 wieder auf Null. 17. Man kann die induktive Spannung bei einer Spule nicht (direkt) messen. Wie muss man vorgehen (Messungen und Berechnungen), um UL doch zu bestimmen? Antwort: 180 Induktives Verhalten 18. Welche Beobachtung suggeriert, dass die Änderungsrate der elektrischen Stromstärke bei einem induktiven Effekt proportional zur induktiven Spannung sein könnte? Antwort: Vergleich der Formen des zeitlichen Verlaufs von UL und dIQ /dt , die man aus Versuchsdaten erhält oder herleitet. 19. Nehmen Sie an, die Änderungsrate des elektrischen Stromes sei beim induktiven Effekt proportional zur induktiven Spannung. Welche Bedeutung hat dann der Proportionalitätsfaktor in der Gleichung dIQ /dt = a UL ? Antwort: Er sagt, wie “leicht” sich der Strom ändern lässt, er ist also umgekehrt proportional zur “Trägheit” des Stromes. 20. Worin besteht die “Trägheit” der Elektrizität? Was für eine Beobachtung suggeriert, dass elektrische Induktion etwas mit Magnetismus zu tun hat? Antwort: Kopplung mit Magnetismus. Eine Spule funktioniert als Elektromagnet. 21. Wenn elektrische Ladung durch einen geraden Draht fliesst, so baut sich um ihn ein Magnetfeld auf. Heisst das, dass auch der Transport von Ladung durch einen geraden Draht dem Phänomen der Induktion unterliegt? Antwort: Ja, allerdings normalerweise nur sehr schwach. 22. Wie gross ist die induktive Zeitkonstante beim Anfahren des Wasserstroms in Abb.5.2? Entsprechen die Daten einer zerfallenden Exponentialfunktion? Antwort: τL ≈ 0.2 s; exponentieller Zerfall zum Maximalwert hin. 23. Die Stromstärke als Funktion der Zeit in Abb.5.13 stammt vom Anfahren des Was- serstroms aus einem Tank mit einem Radius von 0.125 m. Das Wasser stand am Anfang 50 cm hoch. Wie gross ist die Induktiviät des Wassers im Rohr? Antwort: LV ≈ 2·107 Pa·s2 /m3 . 24. Wie gross sind die induktiven Zeitkonstanten des Anfahrens und Stoppens des elek- trischen Stromes in Abb.5.9 (vergrösserte Ausschnitte unten)? Sollten die beiden Werte gleich gross sein? Sind das die selben Zeitkonstanten wie in Abb.5.11? Antwort: 0.25 s und 0.2 s. Wenn die Induktivität von Spule mit Eisenkern konstant wäre, würde man die gleichen Werte erwarten. Und sie sollten denen in Abb.5.11 entsprechen. 0.06 Current / A Current / A 0.06 0.04 0.02 0 0.75 0.04 0.02 0 1 1.25 1.5 1.75 Time / s 2 2.25 3.5 3.75 4 4.25 4.5 4.75 Time / s 5 25. Wie sieht das Stromstärke-Zeit Diagramm beim Anfahren eines elektrischen Stromkreises (mit Spannungsquelle, die bei t = 1.0 s auf 5.0 V gestellt wird (vorher null), und Spule mit elektrischem Widerstand von 2.0 Ω und Induktivität von 2.0 H) aus? Antwort: 26. Warum gibt es in RC Systemen keine Schwingungen? Antwort: Weil Trägheit der Ströme vernachlässigt wird. Weil Ströme direkt proportional zur Potentialdifferenz entlang den Leitern sind. 27. Wenn man einem Tank mit Ausfluss Wasser rhytmisch zuführt, so schwingt der Wasserstand. Warum bilden Tank, Schlauch, Zufuhr und Wasser trotzdem kein schwingendes System? 5.3 Konzepte und Beziehungen 181 Antwort: Weil das rhytmische Verhalten von aussen aufgezwungen ist. Das System verhält sich trotzdem (näherungsweise) wie ein RC-System. 28. Warum kommt es bei den Beispielen von zwei mit einem Schlauch verbundenen Tanks in Kapitel 2 und 3 nicht zu Schwingungen, obwohl das System im Wesentlichen gleich wie ein U-Rohr ist? Antwort: Weil die Induktivität zu klein und der Strömungswiderstand zu gross ist. 29. Welcher Prozess führt dazu, dass die Amplitude der Schwingung in Abb.5.14 mit der Zeit abnimmt? Antwort: Reibung (resistives Verhalten). 30. In einem U-Rohr schwingt eine Flüssigkeit wenigstens eine Weile lang. Ist es möglich, dass eine Flüssigkeit in einem U-Rohr trotzdem nicht schwingt? Ist es möglich, in einem schwingfähigen System die Parameter so einzustellen, dass das System zum Gleichgewichtszustand hin “kriecht”? Antwort: Ja, wenn die Flüssigkeit zu zäh ist. 31. Wasser schwingt in einem U-Rohr. Zu einem bestimmten Zeitpunkt sind die Füllhö- hen in den beiden Schenkeln zum ersten Mal gleich. Wie gross ist dann die kapazitive Druckdifferenz zwischen den beiden Schenkeln? Heisst das, dass das Fluid dann nicht fliesst? Antwort: Null. Das Fluid fliesst trotzdem weiter, wenn der induktive Effekt stark genug ist (überschiessen, schwingen). 32. Woran sieht man in den Daten in Abb.5.16, dass die beiden Kondensatoren nicht die gleiche Kapazität haben? Welcher Kondensator hat die Grössere Kapazität? Antwort: Ausschläge (Amplituden) sind nicht gleich stark. Kurve mit kleinerer Amplitude gehört zum Kondensator mit grösserer Kapazität. 33. Welche Systemeigenschaften werden gebraucht, dass es zu Schwingungen kommt? (Widerstand? Kapazität? Induktivität?) Antwort: Kapazität und Induktivität. 34. Was für Veränderungen in den gemessenen Daten in Abb.5.16 erwarten Sie, wenn Sie (a) die Kapazität beider Kondensatoren vergrössern, (b) den Widerstandswert des Spulendrahtes vergrössern, (c) eine Spule mit grösserer Induktivität nehmen? Antwort: (a) langsameres Schwingen, (b) schnelleres Abklingen der Amplituden, (c) langsameres Schwingen. 35. Zeichnen Sie von Hand so genau wie möglich ein Diagramm, das alle vier Spannungen entsprechend dem Schaltungsdiagramm in Abb.5.16 als Funktionen der Zeit enthält. Überzeugen Sie sich über die Zusammenhänge zwischen diesen Grössen. Antwort: 36. Wie muss das analoge elektrische Schaltungsdiagramm für das U-Rohr in Abb.5.14 aussehen? Antwort: 37. Welcher Teil des Diagramms des dynamischen Modells in Abb.5.19 repräsentiert die konstitutive Beziehung für das Induktionsverhalten? Antwort: Zusammenhang zwischen delta_pL, L und dIV_dt. 38. Wie unterscheidet sich in einem Diagramm eines systemdynamischen Modells die Darstellung einer Bilanz von der einer reinen Integration? Antwort: Bei einer echten Bilanz können mehrere Inputs und Outputs vorkommen. 39. Kann man (im Prinzip) jede (zeitliche) Funktion integrieren? Kann man jede Grösse bilanzieren? Antwort: Integrieren: ja. Bilanzieren: nein. 182 Induktives Verhalten 40. Wie gross ist die Zeitkonstante im Modell in Abb.5.19? Antwort: LV /RV = 0.27 s. 41. Wie würde sich die Funktion in Abb.5.19 ändern, wenn die Induktivität der Flüssigkeit zwei mal so gross wäre? Antwort: Anfängliche Steigung der Kurve wäre nur halb so gross, sonst bleibt alles gleich.