Implementation einer magnetischen Wolke in - May
Werbung

Fachbereich Mathematik / Informatik
Fach Angewandte Systemwissenschaft
Implementation einer magnetischen Wolke in ein
numerisches Modell des interplanetaren Transports
Diplomarbeit
von
Michael Beer
Matrikelnummer: 919 846
Betreuer:
Prof. Dr. May-Britt Kallenrode
Universität Osnabrück, Fachbereich Physik
Osnabrück, den 30. September 2009
Inhaltsverzeichnis
Inhaltsverzeichnis
iii
Einleitung
iv
1 Grundlagen
1.1 Die Kontinuitätsgleichung . . . . . . . . . .
1.2 Magnetohydrodynamik . . . . . . . . . . . .
1.2.1 Grundgleichungen . . . . . . . . . . .
1.2.2 Das Frozen-In-Prinzip . . . . . . . .
1.2.3 Magnetischer Druck und magnetische
1.2.4 Rekonnexion von Feldlinien . . . . .
1.2.5 Fokussierung . . . . . . . . . . . . .
1.3 Interplanetares Magnetfeld . . . . . . . . . .
.
.
.
.
.
.
.
.
2
2
4
4
7
10
12
13
16
.
.
.
.
.
.
.
.
.
.
21
21
22
22
24
25
26
28
28
31
34
.
.
.
.
.
.
.
.
36
36
37
37
39
41
42
42
45
. . . . . .
. . . . . .
. . . . . .
. . . . . .
Spannung
. . . . . .
. . . . . .
. . . . . .
2 Interplanetarer Transport
2.1 Phänomenbeschreibung . . . . . . . . . . . . .
2.2 Die Transportgleichung . . . . . . . . . . . . .
2.2.1 Herleitung . . . . . . . . . . . . . . . .
2.2.2 Fokussierung . . . . . . . . . . . . . .
2.2.3 Pitchwinkeldiffusion . . . . . . . . . .
2.2.4 Querdiffusion . . . . . . . . . . . . . .
2.3 Lösungsmethodik . . . . . . . . . . . . . . . .
2.3.1 Differenzenverfahren . . . . . . . . . .
2.3.2 Diskretisierung der Transportgleichung
2.4 Intensität und Anisotropie . . . . . . . . . . .
3 Magnetische Wolken
3.1 Definition . . . . . . . . . . . . . . . . . . .
3.2 Eigenschaften . . . . . . . . . . . . . . . . .
3.2.1 Vermutete Struktur . . . . . . . . . .
3.2.2 Evolution einer magnetischen Wolke
3.3 Ursprung . . . . . . . . . . . . . . . . . . .
3.4 Das interplanetare Feld um eine magnetische
3.4.1 Feldverlauf . . . . . . . . . . . . . .
3.4.2 Begleitende Phänomene . . . . . . .
ii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . .
. . . .
. . . .
. . . .
. . . .
Wolke
. . . .
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Modell
4.1 Vorüberlegungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Überblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Die Änderung der Feldgeometrie . . . . . . . . . . . . . . . . . . . . .
4.3.1 Die magnetische Wolke . . . . . . . . . . . . . . . . . . . . . .
4.3.2 Asymmetrie . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.2.1 Asymmetrischer Faktor . . . . . . . . . . . . . . . .
4.3.2.2 Bezugspunkt pk . . . . . . . . . . . . . . . . . . . . .
4.3.2.3 Querschnitte . . . . . . . . . . . . . . . . . . . . . .
4.3.2.4 Bugwelle . . . . . . . . . . . . . . . . . . . . . . . .
4.3.3 Zerrkreise . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.3.1 Maximalkreis . . . . . . . . . . . . . . . . . . . . . .
4.3.3.2 Zerrkreis einer bestimmten Feldlinie . . . . . . . . .
4.3.3.3 Verzerrung der Feldlinien . . . . . . . . . . . . . . .
4.4 Fokussierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.1 Bestimmung der Fokussierungslänge im modifizierten Bereich
4.4.2 Bestimmung der Kompressionsrate A . . . . . . . . . . . . . .
47
47
48
50
50
51
51
52
53
53
54
54
55
57
58
59
60
5 Implementierung
5.1 Überblick . . . . . . . . . . . . . . . . . . . . . . .
5.2 GREF . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Veränderungen innerhalb des ursprünglichen Codes
5.4 magneticcloud.F95 . . . . . . . . . . . . . . . . .
5.4.1 Schnittpunktberechnung . . . . . . . . . . .
5.4.2 Linienführung . . . . . . . . . . . . . . . . .
64
64
64
65
66
67
69
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6 Plausibilitätsbetrachtungen
71
6.1 Modellverhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6.2 Eine Implementationsstudie . . . . . . . . . . . . . . . . . . . . . . . 74
6.3 Fehleranalyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
7 Zusammenfassung und Ausblick
80
A
82
82
83
83
83
83
Mathematischer Anhang
A.1 Bezeichner . . . . . . . . . . .
A.2 Mathematischer Anhang . . .
A.2.1 Konventionen . . . . .
A.2.2 Transformationen . . .
A.2.3 Archimedische Spirale
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
iii
Einleitung
Die Sonne befindet sich in einer Entfernung von ungefähr 149 Milliarden Kilometern
von der Erde, eine Strecke, für die selbst Licht acht Minuten benötigt, um sie zurückzulegen. Sogar zum sonnennächsten Planeten Merkur ist das Sonnenlicht über drei
Minuten unterwegs. Trotz dieser gigantischen Entfernungen steht die Sonne keineswegs isoliert im All. Ihr Licht, ohne dass kein Leben auf der Erde möglich wäre, ist
hierfür nur der eindrucksvollste Beweis. Tatsächlich ist der interplanetare Raum von
einem Magnetfeld ausgefüllt, welches von der Sonne erzeugt und aufrecht erhalten
wird. Seit den fünfziger Jahren des vergangenen Jahrhunderts ist darüber hinaus
klar, dass die Sonne Materie ausstößt. Da diese vollständig ionisiert ist, steht sie
in ständiger Wechselwirkung mit dem interplanetaren Feld. Je nach Situation wirkt
sich das eine auf das andere aus. Parker war einer der ersten, der einen gleichmäßigen
Ausstoß relativ homogener Partikel für die Sonne postulierte. Seine Vorstellung eines kontinuierlichen Teilchenstroms ist heute als Sonnenwind allgemein akzeptiert:
Der interplanetare Raum ist von einem Plasma erfüllt, das von der Sonne in die
Außenbereiche des Planetensystemes fließt. In eruptiven Prozessen stößt die Sonne darüber hinaus in unregelmäßigen Intervallen räumlich begrenzt Teilchenströme
aus, deren Energien sehr viel höher als die des kontinuierlichen Sonnenwindes liegen.
Dabei werden Ionen von der Sonne durch den interplanetaren Raum getrieben. Man
spricht hierbei von interplanetarem Transport. Allzu oft führen eruptive Prozesse
in der Sonnenkorona auch zu großskaligen Störungen des interplanetaren Feldes, die
sich bis weit über die Erdumlaufbahn hinaus auszubreiten vermögen. Die Entwicklung derartiger Störungen wird inzwischen verhältnismäßig gut verstanden, wenn
auch die solaren Prozesse noch manche Frage bergen. Mit dem Roeloffschen Transportmodell liegt außerdem eine mathematische Beschreibung der von der Sonne
ausgehenden hochenergetischen Plasmaströme vor. Dieses Modell verzeichnet gute
Erfolge bei der Reproduktion von Messdaten in einfach gehaltenen Situationen. In
der Natur der magnetischen Wolken zum Einen und solaren Teilchenejektionen zum
Anderen liegt es, dass diese oft gemeinsam auftreten oder zumindest aufeinander
treffen. Bisherige Anwendungen des Roeloffschen Modells gehen jedoch von einem
statischen, ungestörten Feld aus.
In der vorliegenden Arbeit wird nun der Versuch unternommen, eine Methode zu
entwickeln, mit der das Roeloffsche Modell auf Situationen mit gestörtem Feld angewendet werden kann. Dabei wird das Augenmerk auf eine bestimmte Klasse dieser
Magnetfeldstörungen, den magnetischen Wolken, beschränkt.
Dazu werden im Kapitel 1 zunächst elementare Erkenntnisse zum Verhalten von
iv
Plasma und Magnetfeldern erläutert, auf welchen die weiteren Kapitel aufbauen.
Anschließend folgt Kapitel 2 mit einer Darstellung von der Sonne ausgehender, hochenergetischer Ionenströme im interplanetaren Raum, die von der Sonne ausgehen,
sowie eine Erläuterung deren mathematischer Beschreibung nach Roeloff. Kapitel 3
beschäftigt sich mit der Beschreibung magnetischer Wolken, deren Ursprung, Entwicklung und Phänomenen, die oft im Zusammenhang mit magnetischen Wolken
beobachtet werden und daher möglicherweise in irgendeiner Form mit diesen in Zusammenhang stehen. Danach versucht Kapitel 4, einen Weg aufzuzeigen, um den interplanetaren Transport auch unter der Anwesenheit magnetischer Wolken mit Hilfe
des Roeloffschen Modells zu beschreiben. Annahmen zur Vereinfachung der Situation werden getroffen, sowie Abänderungsvorschläge an einem bestehenden Modell
gemacht. Kapitel 5 beschreibt die Vorgehensweise, wie das entwickelte Modell in
das Programm GREF implementiert werden kann. In Kapitel 6 wird schließlich eine
erste Implementationsstudie die grundlegende Tauglichkeit des Modells geprüft. Die
Sichtung der Literatur sowie die Entwicklung des Modells nahmen dabei einen wesentlichen Teil der zur Verfügung stehenden Zeit in Anspruch. Daher konnte in der
so verbliebenen Spanne lediglich ein experimenteller Prototyp entwickelt werden.
1
1 Grundlagen
1.1 Die Kontinuitätsgleichung
Man betrachtet ein System mit einer Erhaltungsgröße K, d.h. eine Größe welche
dK
= 0 mit t als der Zeit erfüllt, wie beispielsweise die Gesamtmasse. Weiterhin soll
dt
man jedem Punkt des Systemvolumens eine Dichte κ so zuordnen, dass dK = κd3 x
gilt.
Nimmt man an, dass K strömt, kann man jedem Punkt außerdem ein Strömungsfeld
~v (~x) und so einen Fluss ~j(~x) = κ~v zuordnen. Ändert sich K nun in einem Volumen)
element, ist dort also ∂K(V
6= 0, so kann diese Änderung bei insgesamt erhaltenem
∂t
K nur durch einen Nettozu- oder Abfluss von oder in ein Nachbarvolumenelement
rühren. Lässt man dabei das betrachtete Volumenelement inifitesimal klein werden,
so folgt Gleichung (1.1).
∂κ
+ ∇ (κ~v )
∂t
∂κ
+ ∇κ · ~v + κ∇ · ~v
=
∂t
3 ∂κ X ∂κ dxi
∂vi
=
+
+κ
∂t
∂xi dt
∂xi
i=1
0 =
(1.1)
Gleichung (1.1) heißt die Kontinuitätsgleichung bzw. das zweite Ficksche Gesetz..
Wird K lokal erzeugt bzw. vernichtet oder gilt gar dK
6= 0, kann man dies durch
dt
eine Quellfunktion Q(t, ~x) beschreiben. Es muss dann Gleichung (1.2) gelten.
∂κ
= −∇ · (κ~v ) + Q (t, ~x)
∂t
(1.2)
Die Veränderung von K in einem Volumenelement ist die Summe aus Nettozu- oder
Abfluss und der “Produktion” in diesem Volumenelement. Gleichung (1.2) gilt also
auch für Größen, die nicht erhalten sind.
Die Bedingung (1.1) gilt auch für Phasenraumdichten und wird in dieser Eigenschaft
in [Reif 1975, Anhang A.13] detailiert hergeleitet. Im Phasenraum repräsentiert ein
2
Punkt einen möglichen Zustand des betrachteten Systemes, weswegen sich dessen
Koordinaten aus zwei qualitativ verschiedenen Gruppen zusammen, nämlich jeweils
f Ortskoordinaten xi und f Impulskoordinaten pi (mit f als der Zahl der Freiheitsgrade des Systemes), zusammensetzen. Für den Phasenraum gilt der Satz von
Liouville1 , nachdem eine konstante Punktezahl2 im Phasenraum stets ein Volumen
konstanter Größe überdeckt. Bezeichnet man mit
d
(xi )i=1...f
~v =
dt (pi )i=1...f
das zur Phasenraumdichte κ gehörendes Geschwindigkeitsfeld, so ist diese Aussage
f P
∂ dxi
∂ dpi
äquivalent zu 0 = ∇~v =
+
. Für den Phasenraum ergibt sich so
∂xi dt
∂pi dt
i=1
die Kontinuitätsgleichung als die Liouvillegleichung (1.3).
f
∂κ X
+
∂t
i=1
∂κ dxi
∂κ dpi
+
∂xi dt
∂pi dt
=
dκ
=0
dt
(1.3)
Betrachtet man ein Teilchenkonglomerat mit einer Dichteverteilung ρ, so setzt sich
die
P Geschwindigkeit eines Einzelteilchens meist aus mehreren Komponenten ~vGes =
~vi zusammen, die aus unterschiedlichen physikalischen Prozessen herrühren. Ein
Spezialfall tritt ein, falls die Teilchen einen stochastischen Bewegungsanteil ~vDif f
besitzen, wie bspw. die Brownsche Molekularbewegung. Der Mittelwert über alle
auftretenden Werte dieses Geschwindigkeitsanteils ist identisch 0, d.h. der Schwerpunkt des Teilchenensembles wandert nicht. Die stochastischen Schwankungen führen dazu, dass sich die Teilchen auf das Raumvolumen verteilen. Die resultierende
Teilchenstromdichte ~vDif f ρ folgt gemäß des ersten Fickschen Gesetzes dem Dichtegradienten abwärts, d.h. ~vDif f ρ = −∇ρ. In diesem Fall ergibt sich aus der Kontinuitätsgleichung (1.4).
∂f
∂t
= −∇(D∇f ) +
X
∇~vi f + Q
(1.4)
P
∇~vi f ist dabei der sich aus den übrigen Geschwindigkeitsanteilen ~vi ergebende
Anteil. Den so beschriebenen Prozess bezeichnet man als Diffusion. Da der Fluss
tendenziell von lokalen Dichtemaxima hin zu lokalen Minima gerichtet ist, führt
Diffusion also letztendlich dazu, dass sich Dichteunterschiede ausgleichen. D ist eine
Proportionalitätskonstante, die letztlich die Intensität der zufälligen Bewegungen
beschreibt und damit die Geschwindigkeit des Prozesses bestimmt.
1
Er gilt zunächst nur für gleichartige, wechselwirkungsfreie Teilchen, die alle von ein und demselben äußeren Kraftfeld beeinflusst werden. Für im Rahmen dieser Arbeit betrachtete Situationen
sind diese Bedingungen erfüllt.
2
Ein “Punkt” bezeichnet hierbei nach wie vor einen kompletten Zustand des betrachteten Systems.
3
1.2 Magnetohydrodynamik
1.2.1 Grundgleichungen
Ort der in dieser Arbeit betrachteten Vorgänge ist der Raum zwischen Sonne und
den Planeten. Dieser ist von elektromagnetischen Feldern sowie einem, wenn auch
dünnem und damit stoßfreiem, Plasma durchsetzt. In guter Näherung kann man
dieses als perfekten Leiter denken. Dieses den interplanetaren Raum durchsetzende
Plasma erlaubt keine Kernreaktionen und weist in der Regel Ströme auf, deren
Geschwindigkeiten als sehr viel kleiner als die Lichtgeschwindigkeit angenommen
werden. Ihm kann man prinzipiell zu jeder Zeit t und an allen Punkten ~x der Domäne
verschiedene Größen zuordnen. Die Masse wie die Ladungszahl sind in diesem System
Erhaltungsgrößen. Nach Abschnitt 1.1 muss damit sowohl für die Massendichte %
wie auch für die Ladungsdichte ζ die Kontinuitätsgleichung (1.1) gelten.
∂%
+ ∇ · (%~v ) = 0
∂t
∂ζ
+ ∇ · (ζ~v ) = 0
∂t
(1.5)
(1.6)
Mit der Gesamtmasse muss auch die Gesamtenergie des Teilchenkonglomerats erhalten bleiben. Man kann unter der Annahme adiabatischer - also entropieerhaltender
- Vorgänge hieraus eine ähnliche “Erhaltungsgleichung” für den Druck p aufstellen.
Die genaue Herleitung sprengte den hiesigen Rahmen, daher sei hier lediglich auf
das Kapitel A.7 in [Prölss 2001] verwiesen. Diese führt letztendlich auf Gleichung
(1.7) für ein Plasma gleichartiger Teilchen mit f Freiheitsgraden.
f ∂p
+
2 ∂t
f
f
+ 1 p∇ · ~v + ~v ∇p =
2
2
∂p
f +2
+ ~v ∇p + γp∇ · ~v = 0 , γ =
∂t
f
(1.7)
Diese ist übrigens äquivalent zur bekannten Zustandsgleichung für adiabatische Vorgänge (1.8) (Siehe [Prölss 2001, Abschnitt A.7]).
d p
dt %γ
= 0
(1.8)
In einem wie hier angenommen dünnen Plasma finden Wechselwirkungen in erster
Linie zwischen Partikeln und elektromagnetischen Feldern statt. Diese werden durch
die Maxwellgleichungen (1.9) bis (1.12) beschrieben.
4
~ = 0
∇·B
~ = ζ
∇·E
0
(1.9)
(1.10)
~
~ = µ0~j + √ 1 ∂ E
∇×B
0 µ0 ∂t
~
~ = − ∂B
∇×E
∂t
(1.11)
(1.12)
~j ist hier ganz im Sinne von Abschnitt 1.1 der Strom ~j = ζ~v . Wäre das Plamsa
in Ruhe, ließe sich ihm also kein Strömungsfeld ~v zuordnen, verschwände mit ~j der
entsprechende Term in Gleichung (1.11).
Für ein perfekt leitendes Plasma, d.h. einem Plasma, dessen Leitfähigkeit σ gegen
unendlich strebt, liefert das Ohmsche Gesetz
~ + ~v × B
~ =⇒
~j = σ E
~
~ + ~v × B
~ = j → 0 bei σ → ∞
E
σ
(1.13)
~ in Gleichung (1.12), gelangt man zu der von E
Ersetzt man mit dieser Beziehung E
freien Version (1.14).
~
∂B
~
− ∇ × ~v × B
= 0
∂t
(1.14)
Auch für Elemente eines Fluids muss die Newtonsche Bewegungsgleichung gelten,
d.h. die Ableitung des Impulses
muss gleich der auf sie wirkenden Gesamtkraft F~
R
d
d
% (~x) ~v (~x) d3 x. Da sich V (t) als Integrationsgebiet (bei
sein: F~ = dt (m~v ) = dt
V (t)
inkompressiblen Fluiden) mit der Zeit ändert, kann die Ableitung nicht direkt unter das Integral gezogen werden. Stattdessen muss dieses in Lagrange-Koordinaten
transformiert werden, wodurch die Zeitabhängigkeit des Integrationsgebietes verschwindet und sich
Z
Z
Z
d
d~v 3
d~v
3
% (~x) ~v (~x) d x = % d x = f~d3 x =⇒ f~ = %
dt
dt
dt
V (t)
V
V
und also
5
∂~v T ∂~v
·
∂t
∂xi i
∂~v
= %
+ (~v · ∇) ~v =
∂t
D~v
= f~
= %
Dt
d
% ~v (t, ~x (t)) = %
dt
dt
dt
d~
x
dt
ergibt (Vergleiche [Goedbloed u. Poedts 2004]). Hierbei ist der Operator
∂
D
:= ∂t
+ ~v · ∇ definiert.
als sog. Lagrangesche Zeitableitung, als Dt
(1.15)
D
,
Dt
bekannt
Im Falle eines Plasmas wirken auf ein Element dabei die durch den Druck verursachte Teilkraftdichte −∇p, die durch die Ladungsdichte ζ verursachte elektrostatische
~ sowie der im Falle einer Plasmaströmung und unter Anwesenheit eiKraftdichte ζ E
~ hervorgerufene Beitrag der Lorentzkraft ζ~v ×B
~ = ~j×B.
~
nes externen Magnetfeldes B
Gravitationskräfte kann man für das Plasma im interplanetaren Raum auf Grund
der geringen Massedichte der betrachteten Teilchen gegen die übrigen Kräfte vernachlässigen. Man erhält also
%
∂~v
+ (~v · ∇) ~v
∂t
~ + ~j × B
~ − ∇p
= ζE
(1.16)
Da von einem nahezu idealen Leiter ausgegangen wird, werden elektrische Felder
nichtverschwindender Stärke unmittelbar zu einer Ladungsverschiebung führen,
die
~ gilt
selbige Felder neutralisiert. Man kann also davon ausgehen, dass E ~v × B
~ in obiger Gleichung vernachlässigen. Für eine etwas
und konsequent den Term ζ E
formalere Begründung hierfür sei auf [Goedbloed u. Poedts 2004], Abschnitt 4.1,
verwiesen, wo eine explizite Abschätzung des Betrages erfolgt. Weiters lässt sich aus
besagter Gleichung über das Ampèresche Gesetz
~
~j = 1 ∇ × B
µ0
auch die Ladungsstromdichte eliminieren, so dass
%
∂~v
1 ~ ×B
~ = 0
+ ~v ∇ · ~v + ∇p −
∇×B
∂t
µ0
verbleibt.
6
(1.17)
Mit diesen beiden Versionen (1.14) und (1.17) sowie den Maxwellgleichungen (1.9)
und (1.7) und der Massenerhaltung (1.5) hat man nun einen Gleichungssatz, welcher
das Verhalten eines Plasmas mit den Kenngrößen Druck p, Dichte % sowie dem
~ beschreibt. Diese
Strömungsfeld ~v unter dem Einfluss eines externen Magnetfeldes B
Gleichungen sind die Grundgleichungen der Magnetohydrodynamik :
D
% + %∇ · ~v = 0
Dt
D
p + γp∇ · ~v = 0
Dt
~
∂B
~
− ∇ × ~v × B
= 0,
∂t
D
1 ~
~ = 0
% ~v + ∇p −
∇×B ×B
Dt
µ0
(1.18)
(1.19)
~ =0
∇·B
(1.20)
(1.21)
Diese Gleichungen sind eindeutig, das heißt, unter entsprechenden Anfangs- und
Randbedingungen ist der Zustand des Plasmas und der es durchsetzenden elektromagnetischen Felder in eindeutiger Weise zu allen Zeiten und für jeden Ort festgelegt.
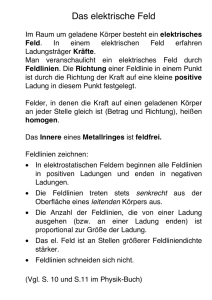
1.2.2 Das Frozen-In-Prinzip
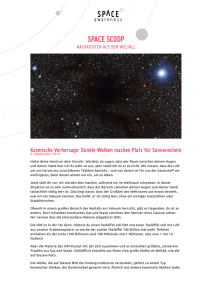
Abbildung 1.1: Veranschaulichung zum Frozen-In-Prinzip. Quelle: [Prölss 2001]
Unter der Annahme einer gegen unendlich strebenden Leitfähigkeit lassen sich für
bewegtes Plasma zwei Theoreme formulieren, welche die Beziehung ebenjenes mit
einem vorhandenem Magnetfeld beschreiben:
7
1. “Der magnetische Fluss durch einen sich mit der Strömung mitbewegenden
Plasmaring bleibt konstant”.
2. Die Magnetfeldlinien folgen den Trajektorien der Führungszentren entsprechender Plasmaelemente.
Die Formulierung beider ist in [Prölss 2001] erfolgt, wobei das zweite eine unmittelbare Konsequenz aus dem ersten darstellt.
Betrachtet man einen eine Fläche A1 einschließenden Plasmaring und dessen Entwicklung in einem Zeitintervall ∆t, so wird dieser nach dem Zeitintervall ∆t eine
Fläche A2 einschließen. Die Unterteilung des Intervalles ∆t in immer kleinere Einheiten, mithin die Betrachtung von immer mehr Zwischenflächen zwischen A1 und A2
liefert im infinitesimalen Grenzfall einen aus eben diesen Flächen zusammengesetzten unregelmäßigen Zylinder. Dessen Oberfläche O bildet eine geschlossene Fläche
mit A1 und A2 als Grundflächen sowie AM = O \ A1 \ A2 als dessen Mantel. Der
Fluss der magnetischen Induktion durch diese geschlossene Oberfläche muss sich zu
Null ergeben: Die Kombination der Grundgleichung (1.9) mit dem Gaußschen Satz
~ als Normale eines infinitesimalen Flächenelementes und V als dem
liefert mit dA
eingeschlossenen Volumen zu jedem beliebigen Zeitpunkt
Z
0 =
V
~
∇ · BdV
=
Z
~ · dA
~
B
O
= ΦAM + ΦA2 − ΦA1 =⇒ ΦA2 = ΦA1 − ΦAM
(1.22)
R
~ · dW
~ ist hierbei wie üblich der magnetische Fluss durch die Fläche W
ΦW := W B
(zu einem gegebenen festen Zeitpunkt).
Man betrachte nun die Änderung des Flusses zwischen t, wobei der Plasmaring
Fläche A1 umschließt, und t + ∆t, wobei er Fläche A2 umschließt und ersetze ΦA2
mittels Gleichung (1.22):
∆Φ
ΦA2 (t + ∆t) − ΦA1 (t)
=
=
∆t
∆t
ΦA1 (t + ∆t) − ΦAM (t + ∆t) − ΦA1 (t)
=
∆t
ΦA1 (t + ∆t) − ΦA1 (t) ΦAM (t + ∆t)
=
−
∆t
∆t
Für lokal wenig ausgedehnte Gebiete und verschwindende Zeiträume kann man eine
einheitliche Plasmageschwindigkeit ~u annehmen.
8
Für hinreichend kleine Zeitabschnitte wird sich die Verformung zwischen A1 und A2
in Grenzen halten, man wird dann einen näherungsweise regulären Zylinder anneh~ des Mantels
men können. Unter dieser Annahme lässt sich das Flächenelement dW
durch das Kreuzprodukt aus dem Linienelement d~l des die Fläche A1 umschließenden
Weges sowie dem Vektor ~u∆t, der die Höhe des Zylinders angibt, nähern:
Z
~ · dW
~ ≈
B
AM
I
I
~ · d~l × ~u∆t =
B
∂A1
I
~ · d~l = ∆t
~u∆t × B
∂A1
~ · d~l
~u × B
∂A1
Im Grenzfall ∆t → 0 wird so
ΦAM (t + ∆t)
lim
=
∆t→0
∆t
ΦA1 (t + ∆t) − ΦA1 (t)
=
∆t→0
∆t
lim
∆t
lim
H
~ d~l
~
u
×
B
∂A1
∆t
Z
~
∂Φ ∂B
~
=
· dA
∂t A1
A1 ∂t
∆t→0
I
=
~ d~l
~u × B
∂A1
Es ergibt sich schlussendlich unter Zuhilfenahme des Stokesschen Satzes
∆Φ
lim
=
∆t→0 ∆t
I ~
∂B
~
~ d~l =
· dA −
~u × B
A1 ∂t
L
!
Z
~
∂B
~
~ = dΦ (t)
− ∇ × ~u × B
dA
∂t
dt
A1
Z
(1.23)
als die differentielle Änderung des Flusses zum Zeitpunkt t.
~
~ geht hierbei gemäß Gleichung (1.14) gegen Null.
Der Integrand ∂∂tB − ∇ × ~u × B
Es verschwindet unter diesen Voraussetzungen die differentielle Änderung des Flusses durch eine von einem Plasmaring eingeschlossene Fläche also, was Theorem 1
bestätigt. Das zweite Theorem ist eine unmittelbare Konsequenz des ersten. Der
betrachtete Plasmaring kann beliebig klein sein. Es ist daher zulässig, im Grenzfall einen singulären, auf sein Führungszentrum geschrumpften Ring zu betrachten.
Durch diesen einen Punkt kann auf Grund der Eindeutigkeit der Feldlinien nur genau eine führen. Auch hier muss bei Verschiebung dieses “Ringes” die Feldlinie diesen
weiterhin durchdringen, ansonsten wäre das erste Theorem verletzt. Die Linie folgt
also der Trajektorie des Führungszentrums und also der Strömung des Plasmas.
9
Die Herleitung findet sich auch, in ähnlicher Formulierung, in [Kallenrode 2001],
Abschnitt 3.4.1. Es sind hier zwei alternative Interpretationen möglich: Liegt die
Energiedichte des Feldes über der des Plasmas, kann man sich die Plasmabewegung
als vom Magnetfeld entlang der Feldlinien gezwungen vorstellen. Die Einzelteilchen
werden dabei eine Gyration um das Führungszentrum und also die Feldlinie und
somit letztlich einer helixartigen Trajektorie folgen. Liegt sie darunter, so kann man
sich die Feldlinien vom Plasma fort getragen vorstellen. Das Feld ist quasi in die
Plasmabewegung eingefroren - man spricht hier folgerichtig vom Frozen-In-Prinzip.
1.2.3 Magnetischer Druck und magnetische Spannung
~ so
Betrachtet man einen Ladungsstrom ~j in einem inhomogenen Magnetfeld B,
liefert das Ampèresche Gesetz zunächst Gleichung (1.24) für die Dichte der auf ihn
wirkenden Lorentzkraft.
1 ~ ×B
~
∇×B
µ0
~
2
~ ·∇ B
~ = −∇ B + B
~j × B
2µ0
µ0
~ =
~j × B
(1.24)
(1.25)
Diese kann unter Verwendung einer aus der Vektoranalysis bekannten Vektoridentität zum Term (1.25) umgeformt werden. Definiert man sich einen Tensor
Ti,j := −
B2
Bi Bj
+ δi,j
µ0
2µ0
,
so findet man unter Berücksichtigung des Gausschen Gesetzes für magnetische Felder
(1.9)
!
3
2
X
B
Bi Bj
∂
− ∇T = −
δi,j
−
∂xi
2µ0
µ0
i=1
j
3
X
3
X
∂
∂
Bi −
Bi
Bj
∂x
∂x
i
i
i=1
i=1
!
3
X
1
∂
∂
~−
B
B − Bj ∇ · B
Bi
Bj
= −
µ0
∂xj
∂xi
i=1
j
!
3
X
1
∂
∂
=
Bj + B
B
Bi
µ0 i=1 ∂xi
∂xj
1
= −
µ0
∂
B
B − Bj
∂xj
j
10
!
j
Dies entspricht gerade der rechten Seite von Gleichung (1.25) und ist damit eine
alternative Formulierung der durch das Magnetfeld hervorgerufenen Kraft. Sie erscheint analog zu der vom thermodynamischen Druck p hervorgerufener Kraftdichte
∇p. Man stellt T nun zweckmäßigerweise bezüglich eines Koordinatensystems, in
~ verläuft, dar. Gemäß
welchem ein Basisvektor parallel zum Magnetfeldvektor B
[Gurnett u. Bhattacharjee 2005], Abschnitt 6.2, ist die Form (1.26) ein Darstellung
von T für den Fall, dass der 3. Basisvektor parallel zu B liegt
B2
2µ0
T̃ = 0
0
0
B2
2µ0
0
B2
2µ0
0
0
−
B2
µ0
(1.26)
Offenbar besteht der durch den Tensor T beschriebene Druck aus zwei Komponenten:
1. Die erste Komponente mit dem Betrag
Richtung.
B2
2µ0
=: pM wirkt gleichmäßig in jede
~ - Vektors, also entlang
2. Die zweite Komponente wirkt nur in Richtung des B
B2
der entsprechenden Feldlinie mit dem Betrag µ0 =: tM .
Um zu einer konsistenten Interpretation zu gelangen, setzt man in Gleichung (1.21)
die Beziehung (1.25) ein:
D
B2
1 ~
~
~
F = % ~v =
B ·∇ B − ∇ p +
Dt
µ0
2µ0
Wieder taucht pM auf, addiert sich hier einfach zum thermodynamischen Druck hinzu und wirkt sich also entsprechend diesem expansiv aus. Auf Grund dieser Analogie
zum thermodynamischen kann man von
pM =
B2
2µ0
(1.27)
als magnetischem Druck sprechen.
~
~ muss daher gerade der Teil sein,
B ·∇ B
Der verbleibende Teil der Lorentzkraft
welcher parallel zur Feldlinie wirkt. Ein Blick auf das Vorzeichen verrät, dass dieser
im Gegensatz zum magnetischen Druck komprimierend und damit einer Dehnung
der Feldlinien entgegen wirkt. Man bezeichnet
1
µ0
11
~tM =
1 ~
~
B ·∇ B
µ0
(1.28)
daher als magnetische Spannung.
Beide konkurrieren gewissermaßen: Da der magnetische Druck offenbar mit der Feldstärke steigt, neigen Plasmaströme in einem starken Feld dazu, zu “expandieren”,
wodurch sich wegen des Frozen-In-Prinzips auch die Feldlinien in der Regel verlängern. Ebenso wirkt die Spannung verkürzend auf Plasmaströme und den darin
eingefrorenen Feldlinien.
Die Struktur eines Feldes wird also immer ein Ergebnis gleichzeitiger Minimierung
von Spannung und Druck darstellen.
Um beurteilen zu können, inwieweit das Feld oder das Plasma die gegenseitige Interaktion wie in Abschnitt 1.2.2 beschrieben dominieren, sprich inwieweit das Magnetfeld seine Struktur dem Plasma aufprägt oder umgekehrt, wird die Größe β als
Quotient aus thermodynamischem und magnetischem Druck eingeführt:
β :=
p
2µ0 p
=
pB
B2
(1.29)
Für Situationen mit einem β 1 dominiert die Dynamik des Plasmas über das
Feld, die Feldlinien folgen somit den Trajektorien der Plasmaelemente. Bei β 1
ist die Situation eine andere: Das Magnetfeld bestimmt die Dynamik, das Plasma
wird seine Strömung am Feld orientieren. Selbstredend ist die Dominanz eines der
beiden Medien nicht zwingend.
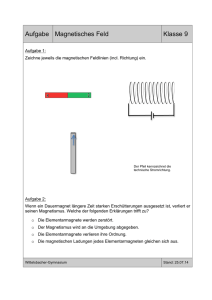
1.2.4 Rekonnexion von Feldlinien
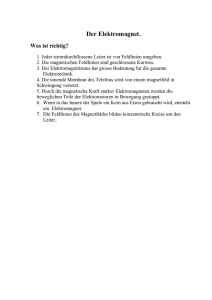
Abbildung 1.2: Schematische Darstellung des Prozesses der Rekonnexion. Quelle:
[Goedbloed u. Poedts 2004]
Das magnetische Feld wird sich immer so strukturieren, dass magnetischer Druck
und magnetische Spannung möglichst abgebaut werden. Dies kann auf mannigfaltige
Weise geschehen und die genaue Prozedur hängt natürlich von der Ausgangslage ab.
12
Interessante Gebiete stellen hierbei unter Anderem die Grenzregionen gegenpoliger
Feldsektoren dar. Besonders anschaulich ist dies im zweidimensionalen Fall wie in
Abbildung 1.2. Zwei Regionen je lokal paralleler Feldlinien liegen so nebeneinander,
dass jede Feldlinie antiparallel zu allen Feldlinien der jeweils anderen Region zu liegen kommt (Situation (a) in der Abbildung). Generell wird, soweit Ionen vorhanden
sind, eine Stromschicht geladener Teilchen die beiden Regionen trennen. Werden die
Feldlinien durch äußere Einflüsse komprimiert, wird das Feld sich so strukturieren,
dass der magnetische Druck minimiert wird. Dies kann durch Neuverbindung der
Feldlinien über die Sektorgrenzen hinweg erfolgen. Ergebnis werden Feldlinienschleifen wie in Situation (c) der Abbildung gezeigt sein. Der Abbau magnetischen Drucks
wurde bis dahin durch eine Zunahme magnetischer Spannung erkauft. Durch Verkürzung der Schlaufen, d.h. eine Zurücknahme der Feldlinien nach (bezogen auf die
Abbildung) außen wird diese jedoch wieder reduziert. Wie in [Goedbloed u. Poedts
2004], Abschnitt 4.4.1 dargelegt, ist dies allerdings unter den Voraussetzungen der
idealen Magnetohydrodynamik nicht möglich. Eine Lösung für das Dilemma, dass
Derartiges dennoch beobachtet wird, ist die Aufgabe gewisser Annahmen. Hier muss
man dies allerdings mit einem Hinweis auf obige Literatur und einem Zitat bewenden
lassen:
“However, interplanetary reconnection remains mystery.” ([Zhong u. a. 2005])
1.2.5 Fokussierung
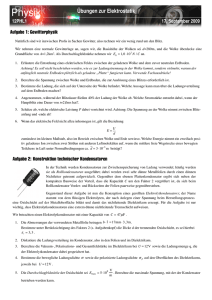
Abbildung 1.3: Bewegung eines geladenen Teilchens entlang einer Feldlinie. Quelle:
[Gurnett u. Bhattacharjee 2005]
Von Plasma als einem Konglomerat von Teilchen wird nun nochmals auf ein einzelnes
geladenes Teilchen in einem Magnetfeld zurückgegangen. Bewegt sich ein Teilchen
~ so
mit der Ladung q und Masse m mit der Geschwindigkeit v durch ein Feld B,
wird es durch die hervorgerufene Lorentzkraft zur Gyration um eine Magnetfeldlinie
wie in Abbildung 1.3 dargestellt gezwungen. Die Bewegung des Teilchens kann als
Überlagerung zweier Teilbewegungen, einer geradlinigen mit dem Geschwindigkeitsvektor ~vk parallel zum Feldvektor und einer Kreisbewegung in der Ebene senkrecht
zum Feldvektor mit ~v⊥ dargestellt werden.
Der Radius dieser Gyrationsbewegung ergibt sich über die Gleichsetzung der Beträge
von Lorentz- und Zentripedalkraft zu
13
Abbildung 1.4: Feldkonfiguration einer magnetischen Flasche. Von Links eintretende
Teilchen werden im konvergierenden Feld rechts reflektiert und am anderen Ende ebenfalls zurückgeworfen. Sie sind in der Flasche gefangen. Quelle: [Gurnett u.
Bhattacharjee 2005]
rL =
mv⊥
|q| B
(1.30)
rL wird als Lamorradius bezeichnet.
Jedem Teilchen lässt sich gemäß (1.31) ein Pitchwinkel zuordnen.
α = arctan
v⊥
vk
(1.31)
µ = cos α = cos arctan
v⊥
vk
(1.32)
In der Regel wird aus praktischen Gründen statt des Pitchwinkels dessen Kosinus µ
betrachtet.
Nun kann Ringströmen I = |q| ω mit ω als der Frequenz des Stromes und q der
strömenden Ladung gemäß (1.33) ein magnetisches Moment zugeordnet werden.
Einem gyrierenden Teilchen ist als in einer Ebene eine Kreisbewegung vollführendes
somit auch ein magnetisches Moment M zuzuordnen.
MM ag = |q| ωA =
2
mv⊥
2B
(1.33)
Im Falle eines nur langsam variierenden Magnetfeldes, also adiabatischer Situationen, ist dieses Moment M nahezu konstant. Man spricht von der 1. adiabatischen
Invarianten.3
3
Es existieren weitere adiabatische Invariante, siehe z.B. [Kallenrode 2001], Abschnitt 2.4.
14
Für die kinetische Energie des Teilchens findet man mit Gl. 1.33
1 2 1
2
mv = m v⊥
+ vk2
2
2
1 2
=
mv + M B
2 k
Ekin =
(1.34)
Diese muss, da E = 0 angenommen wird und damit keine geschwindigkeitsbetragsändernden Kräfte auftreten, erhalten bleiben. Nimmt die Feldstärke zu, so muss also
konsequenterweise die Geschwindigkeit parallel zur Feldlinie abnehmen. Tritt der
betrachtete Partikel also in einen Bereich höherer Feldstärke ein, so muss sich notwendigerweise seine Geschwindigkeit parallel zum Feld verringern, im umgekehrten
Fall erhöhen. Anders ausgedrückt wird sich in einem konvergenten Magnetfeld der
Pitchwinkel eines Teilchens erhöhen, im divergierenden Feld verringern. Man spricht
daher von Fokussierung. Den Grad der Fokussierung bestimmt die relative Feldänderung entlang der Feldlinie. Man definiert daher als Maß die Fokussierungslänge
gemäß Gleichung (1.35), da die Teilchen in einem abnehmenden Feld im eigentlichen
Sinne fokussiert werden, mit negativem Vorzeichen.
λ = −B/
∂B
∂s
(1.35)
s bezeichnet den Weg entlang der betrachteten Feldlinie.
m 2
Aus Gleichung (1.34) geht hervor, dass bei einer Feldstärke von BRefl = 12 M
v
vk verschwinden muss. Dieser Punkt ist also vom Partikel offensichtlich nicht zu
überschreiten, er muss dort seine Driftgeschwindigkeit völlig aufgegeben haben und
schließlich reflektiert werden. Dieser Punkt wird Reflexionspunkt genannt. Betrachtet man Partikel an einem Punkt, in welchem das Feld die Stärke B1 erreicht, so
entscheidet deren Pitchwinkel darüber, ob diese einen Punkt mit Feldstärke B2 passieren können oder reflektiert werden. Das magnetische Moment muss an beiden
Orten gleich sein, mithin unter Berücksichtigung von v⊥ = v sin α und der Tatsache,
dass am Spiegelpunkt α = π2 =⇒ v⊥ = v gelten müsste
2
mv⊥,1
2B1
=
2
mv⊥,2
2B2
B1
=⇒ sin2 α = 1 − cos2 α =
B2
r
B1
=⇒ µ := cos α = 1 −
B2
(1.36)
15
Ein Teilchen mit einem Pitchwinkel an Ort 1, der die Bedingung (1.36) erfüllt,
kämen in Punkt 2 also zur Ruhe. Die Situation ist in Abbildung 1.4 dargestellt.
Ein Teilchen im Punkt p, dass bzgl. der Führungsfeldlinie eine rein senkrechte Geschwindigkeitskomponente v besitzt, wird bezüglich der durch seinen Aufenthaltsort
verlaufenden Feldlinie eine Komponente vk bzgl. dieser Feldlinie besitzen. Diese ist
ihrer ursprünglichen Bewegungsrichtung entgegen gerichtet, sod dass der Partikel
reflektiert wird. Teilchen mit einem höheren Pitchwinkel werden bereits bevor sie
Punkt 1 erreichen können, reflektiert, Teilchen niedrigeren Winkels passieren den
Punkt 2. Wie intuitiv angenommen können sich zum Magnetfeld völlig parallel bewegende Teilchen niemals reflektiert werden - mit dem Pitchwinkel wird µ = 1 und
die Gleichheit für nicht verschwindendes B1 nicht erfüllbar. Eine Konfiguration, bei
welcher das Magnetfeld hinreichend konvergiert, wird daher auch magnetischer Spiegel genannt. Schließt sich an einen Bereich starker Divergenz ein Bereich ebensolcher
Konvergenz wie in Abbildung 1.4 dargestellt an, so können geladene Partikel darin
gefangen werden, da sie an beiden Enden zurückgeworfen werden. Man spricht dann
von einer magnetischen Flasche. Für eine ausführlichere Darstellung sei auf [Kallenrode 2001], [Gurnett u. Bhattacharjee 2005], Kapitel 3.4 oder auch [Goedbloed u.
Poedts 2004], Abschnitt 2.2.3 verwiesen.
1.3 Interplanetares Magnetfeld
Die Sonne stößt beständig geladene Teilchen ins All aus. Diese stammen aus der Sonnenkorona, erhalten ihre Energie mittelbar durch die Fusion im Inneren der Sonne
und bestehen im Wesentlichen aus Elektronen und Protonen sowie einem geringen
Anteil Heliumkernen.4
Dabei beträgt die Strömungsgeschwindigkeit der Teilchen vSW = 470 km
in Erdnähe,
s
also r ≈ 1 AU = 1,49 · 109 km, zeigt jedoch im Einzelnen starke Schwankungen von
Teilchen zu Teilchen von 170 bis > 2000 km
(Vgl. [Prölss 2001]). Der Teilchenfluss
s
ist dabei relativ konstant. Dabei zerfällt der Sonnenwind in zwei verschiedene Komponenten. Als Sonnenwind im eigentlichen Sinne bezeichnet man im Allgemeinen
. Dieser unterscheidet sich nicht nur durch seine
den langsameren Anteil unter 400 km
s
größere Teilchendichte (%slow ≈ 10 cm1 3 für den langsamen zu %fast ≈ 3 cm1 3 für den
schnellen Anteil), sondern auch in seinen Ursprüngen deutlich von der langsameren
Komponente.5 Die auftretende Energie je Teilchen liegt bei beiden Komponenten im
Falle der Protonen im keV- Bereich.
Die den Sonnenwind bildenden Teilchen verlassen die Korona annähernd in radialer
Richtung. Allerdings rotiert die Sonne an ihrem Äquator mit einer Winkelgeschwindigkeit von ωS ≈ 0,0103 rad
. In der Ekliptik ergibt sich damit folgende Situation:
h
Zu einem Zeitpunkt t1 hat ein Teilchen, dass die Sonnenoberfläche zum Zeitpunkt
4
5
Genaueres zu den Eigenschaften des Sonnenwindes findet sich in [Bird u. a. 1990],Kapitel 3.
Der schnelle Sonnenwind tritt vor Allem an den Polen, der langsame in einem Gürtel um den
Äquator der Sonne aus.
16
t0 = 0 verlassen hat, sich um r = t1 vSW radial von der Sonnenoberfläche entfernt.
Gleichzeitig wurde der ursprüngliche Austrittspunkt um α = ωSW t1 unter dem Teilchen weggedreht oder anders ausgedrückt, bezüglich des Austrittspunktes hat sich
das Teilchen um den Winkel −α azimutal vom Austrittspunkt verschoben. Betrachtet man daher einen festen Punkt auf ihrer Oberfläche und die von dort ausgehende,
im Teilchenstrom eingefrorene Magnetfeldlinie, so zeigt diese durchaus nicht radial
nach außen, sondern windet sich vielmehr spiralarmförmig um die Sonne. Dieser
lässt sich, setzt man den Austrittspunkt in Polarkoordinaten und mit Ursprung im
Sonnenzentrum bei (φ0 , r0 ) an, über die Parametrisierung
φ
r
(t) =
ωSW
vSW
t+
φ0
r0
(1.37)
beschreiben. Dies stellt die Parametrisierung eines Armes einer archimedischen Spirale dar. Für Feldlinien außerhalb der Ekliptik ergeben sich andere Verläufe, die mit
dem so genannten Ballerinamodell beschrieben werden können. Zu Details hierzu
sei jedoch auf [Kallenrode 2001] verwiesen. Energiegehalt, damit Geschwindigkeit
und Dichte des Windes, scheint mäßig von der Sonnenaktivität abzuhängen. Nach
[Burlaga 1995, Kaptitel 3.2] erreicht sie kurz nach Aktivitätsmaxima ebenfalls ein
Maximum, während Geschwindigketisminima anscheinend unregelmäßiger auftreten.
Gleichzeitig besitzt die Sonne ein Magnetfeld, welches sich durch Strömungen im
Sonnenplasma speist.6 Diese Ströme verhalten sich dabei teils turbulent, so dass das
Feld unregelmäßig und zeitlich stark variabel austritt. Gebiete gleicher Feldpolarität
sind ungleich verteilt und von unterschiedlichster Gestalt. Die Struktur des solaren
Feldes erscheint daher in Sonnennähe komplex und ständiger Änderung unterworfen.
Mit zunehmenden Abstand von der Sonne nimmt es jedoch eine geordnete Gestalt
an. Dieser Übergang ist bereits bei einem Abstand r von ca. 3 Sonnenradien vom Sonnenmittelpunkt abgeschlossen. Der Feldlinienverlauf wird über das Frozen-In-Prinzip
wesentlich von der Gestalt des langsamen weil dichteren Sonnenwindes geprägt. Einzelne Feldlinien werden mit dem von der Sonne ausströmenden Plasma fortgetragen,
folgen der Strömung des Plasmas und können damit entsprechend der Bahn eines
Teilchens durch die Parametrisierung (1.37) beschrieben werden. Der Formparame1
s
zu β = vωSW
≈ 0.91 AU
. Allerdings
ter der Spirale ergibt sich dabei mit vSW ≈ 470 km
h
führt die unregelmäßige Verteilung von gleichpoligen Gebieten auf der Sonne letztlich dazu, dass das Feld auch im Außenbereich keine regelmäßige Polung aufweist.
Blickt man auf die Ebene der Ekliptik, so zerfällt diese in verschiedene Sektoren, in
welchen die Polarität des Feldes alterniert. Auch kann die Feldstärke bei gleichem
Abstand an unterschiedlichen Punkten durchaus großskalig eine gewisse Variation
6
Zu genaueren Ausführungen, auf welche Art das solare Feld entsteht, siehe z.B. [Goedbloed u.
Poedts 2004].
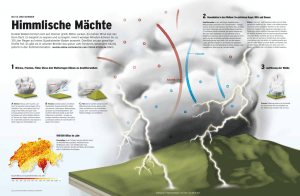
17
Abbildung 1.5: Großskalige Struktur des interplanetaren Magnetfeldes. Quelle:
[Prölss 2001]
aufweisen. Da der Sonnenwind mit der heliographischen Breite variiert, gilt die Feldstruktur wie sie hier beschrieben ist nur für die Ekliptik. Für entlang der Feldlinien
geführte Teilchen ist dies allerdings relativ unerheblich, da sich die Polung lediglich
auf den Gyrationssinn auswirkt. Bei einem aus der Korona austretenden Plasmapaket sorgt das Frozen-In-Prinzip dafür, dass die Trajektorie seines Führungszentrums
mit einer Feldlinie zusammenfällt. Auf Grund des ersten in Abschnitt 1.2.2 geäußerten Theorems wird die Ausdehnung des Plasmapakets senkrecht zum Magnetfeld
unmittelbar mit der Feldliniendichte, also der magnetischen Flussdichte korreliert
sein: Dehnt sich das Paket aus, wird die Flussdichte sinken und umgekehrt. Ein derartiges Paket definiert so eine Flussröhre parallel zum Feldverlauf, innerhalb derer
also die absolute Teilchenzahl wie auch der magnetische Fluss konstant ist. Ist die
durch das Paket überdeckte Fläche A0 an irgendeinem Ort entlang der Führungsfeldlinie s0 bekannt, so lässt sich für beliebige Orte entlang der Führungsfeldlinie
der Querschnitt A(s) der Flussröhre aus der Struktur des Magnetfeldes ermitteln:
18
Φ (s) = BA = konst =⇒
∂
(BA) = 0
∂s
∂B
∂A
A+B
= 0 =⇒
∂s
∂s
1 ∂B
1
1 ∂A
=−
=
=⇒
A ∂s
B ∂s
λ
Rs
A (s) = A0 e s0
(1.38)
1
ds
λ
(1.39)
In (1.38) wurde die Beziehung (1.35) genutzt, um die Fokussierung als Maß heranziehen zu können. Beziehung (1.39) wird später benutzt werden.
Im Magnetfeld können ferner besonders großskalige Feldstörungen bis in den Fernbereich fortwirken, so dass sich insgesamt wie Abbildung 1.5 ein etwas differenziertes
Bild des Feldes ergibt. Nichtsdestotrotz kann und wird in guter Näherung von einer
im Wesentlichen spiralartigen Struktur ausgegangen. 7
In erster Näherung fällt der Betrag der magnetischen Induktion kontinuierlich mit
dem reziproken Abstandsquadrat ab. Berücksichtigt man die anisotrope Feldstärkeverteilung entlang der heliographischen Breite, so findet man für die Ebene der
Ekliptik den exakten analytischen Term für B(r) wie in Gleichung (1.40) gegeben.8
B (r) =
B0 p
1 + β 2 r2
r2
(1.40)
Es sei nochmals darauf hingewießen, dass sich alle hier getroffenen Aussagen ausschießlich auf die Ekliptikebene beziehen, an Orten außerhalb der Ekliptik ist auch
Gleichung (1.40) so nicht gültig. Die Bogenlänge eines Armes s in einem gewissen
Abstand r von der Sonne ist bekannt (siehe Anhang A.2.3). Aus dieser lässt sich
jedoch keine analytische Darstellung von r (s) herleiten.9 . Damit ist auch keine analytische Darstellung der Magnetfeldstärke B (s) entlang eines Armes möglich.
Für das regelmäßige Spiralfeld kann man allerdings die Fokussierungslänge analytisch bestimmen.
1
1 ∂B
1 ∂B dr
=−
=−
λ
B ∂s
B ∂r ds
Aus Gleichung (A.9) ergibt sich
ds
1 + β 2 r2
=p
dr
1 + β 2 r2
7
Vergleiche u.A. [Burlaga 1995], [Prölss 2001].
Siehe z.B. [Kallenrode 2001, Abschnitt 6.3.1]. Der Grund liegt wie bei dem Coulombschen Gesetz
für elektrische Ladungen letztendlich im Gaußschen Satz begründet.
9
Vergleiche [Hatzky 1996], Abschnitt 2.1.1
8
19
und somit mit
dB
B0 2 + β 2 r2
=− 3 p
dr
r
1 + β 2 r2
die Fokussierungslänge für das ungestörte Spiralfeld gemäß Gleichung (1.41).
1
r2
1
= − p
λ
B0 1 + β 2 r2
p
3
r 1 + β 2 r2
=⇒ λ =
2 + β 2 r2
20
B0 2 + β 2 r2
− 3p
r
1 + β 2 r2
!p
1 + β 2 r2
1 + β 2 r2
(1.41)
2 Interplanetarer Transport
2.1 Phänomenbeschreibung
Im Abschnitt 1.3 wird der Sonnenwind als ein von der Sonne ausgehender Teilchenstrom erwähnt. Neben unterschiedlichster elektromagnetische Strahlung1 werden auch höherenergetische Partikel in den interplanetaren Raum abgegeben. Chemisch sind diese nicht vom Sonnenwind zu trennen, auch sie sind hauptsächlich
Protonen, α-Teilchen und Elektronen, besitzen jedoch ein Vielfaches der Energie
der Sonnenwindpartikel. Die Energie dieser Teilchen liegt im Falle von Elektronen
gewöhnlich um 1 MeV, von Protonen im einigen 10 MeV-Bereich und damit grob
um den Faktor 1000 über den typischen Energien des Sonnenwindes. Gemeinhin
werden diese als Solar Energetic Particles (“SEPs”) bezeichnet. Es sei erwähnt, dass
sich im interplanetaren Medium noch weitaus höherenergetische Teilchen tummeln.
Diese stammen in der Regel nicht von der Sonne, sondern von extrasolaren Quellen,
gewissermaßen den “Weiten des Alls”. Neben den hochenergetischen solaren Partikeln existieren also noch eine Vielzahl anderer Teilchenpopulationen verschiedensten
Ursprunges, [Kallenrode 2001, Kapitel 7] gibt hier einen guten Überblick. In der Regel sind diese einzelnen Populationen auf Grund verschiedener Signaturen wie die
mittlere Teilchenenergie gut auseinander zuhalten.
Ist der Sonnenwind dicht genug, um das interplanetare Magnetfeld mit sich zu tragen und ihm so seine Spiralstruktur aufzuprägen, so liegt die Sache bei SEPs anders.
Deren Dichte ist so gering, dass stattdessen das Magnetfeld die Dynamik dominiert.
Die Partikel werden damit gezwungen, um die Feldlinien zu gyrieren und dem Feldlinienverlauf also zu folgen.
Im Gegensatz zum Sonnenwind stammen SEPs von räumlich wie zeitlich eng begrenzten solaren Ereignissen, in der Regel Flares der Sonne.
Interessant ist die Bewegung dieser Teilchen im interplanetaren Raum, ihr Transport von der Sonne. Verschiedene Prozesse wirken sich auf diesen Transport aus.
Zunächst besitzen die Teilchen eine gewisse kinetische Energie, die sie zur Gyration
entlang einer Feldlinie nutzen. Man spricht hier wegen Analogien in der mathematischen Beschreibung vom konvektiven Transport. Offensichtlich ist das interplanetare
Magnetfeld nicht konstant, sondern fällt mit dem Abstand zur Sonne wie in Abschnitt 1.3 erklärt ab. Jede großskalige Änderung des Magnetfeldes führt jedoch zu
Fokussierungsvorgängen, wie sie in Abschnitt 1.2.5 beschrieben werden. Fokussie1
Das sichtbare Licht, auch die UV-Strahlung sind Beispiele hierfür.
21
rung ist daher ebenfalls zu erwarten. Kleinskalige Variationen des Feldes führen
zu infinitesimalen Änderungen des Pitchwinkels der einzelnen Teilchen. Die Summe dieser Änderungen führt dazu, dass einzelne Teilchen ihren Pitchwinkel, gesetzt
das Beobachtungsintervall wird genügend groß gewählt, beliebig ändern können.
Über eine energetisch homogene Teilchenpopulation beobachtet verschmiert damit
die Pitchwinkelverteilung zusehends. Aus einem ursprünglich gerichteten Teilchenstrom, in welchem alle Partikel denselben Pitchwinkel besitzen, entwickelt sich so ein
Strom heterogener Pitchwinkelverteilung. Stünde genügend Zeit bereit und würde
kein weiterer Prozess wirken, so würde sich schließlich eine Gleichverteilung einstellen. so dass alle Pitchwinkel gleich häufig im Strom vertreten wären. Dieser Vorgang lässt sich mathematisch als Diffusion beschreiben, so dass dieser Prozess als
Pitchwinkeldiffusion bezeichnet wird. Zuletzt gyriert jedes Teilchen zwar solange
das Magnetfeld sich nicht ändert, um eine einzige Feldlinie. Störungen können einzelne Teilchen jedoch dazu veranlassen, von der Gyration um eine Feldlinie zu einer
Nachbarfeldlinie zu wechseln. Hier kann auch im physikalischen Sinne von Diffusion gesprochen werden und mathematisch erfolgt die Behandlung entsprechend. Da
diese senkrecht zum Feldlinienverlauf und damit zur Ausbreitungsrichtung verläuft,
spricht man vom Quertransport. Dieser erfolgt im interplanetaren Raum isotrop in
der gesamten Ebene senkrecht zur entsprechenden Feldlinie. Da hier nur die Ebene
der Ekliptik betrachtet wird, findet allerdings auch nur der in dieser Ebene erfolgende Transport Berücksichtigung.
Da das Sonnenwindplasma bereits dünn, die hier betrachteten Teilchenpopulationen
jedoch noch um Größenordnungen weniger dicht sind, kann davon ausgegangen werden, dass keine Stöße erfolgen und sich die kinetische Energie eines Teilchens somit
nicht verändert.
2.2 Die Transportgleichung
2.2.1 Herleitung
Man betrachtet nun eine Flussröhre um eine zentrale Feldlinie herum. Jeden Punkt
in dieser kann man über dessen Abstand z von der zentralen Feldlinie sowie die Bogenlänge der Feldlinie bis zu dem Punkt nächsten Punkt auf der Feldlinie eindeutig
identifizieren. Sei nun f die Partikeldichte in dieser Flussröhre. Diese variiert räumlich und zeitlich, ist also von (s, z, t) abhängig. Weiterhin zerfällt jede Teilchenschar
in Populationen mit unterschiedlichen Pitchwinkeln µ. Betrachtet man die zu einem
festen µ zugehörige Population, so kann man einem Konglomerat aus dieser Population eine Gesamtmasse m zuordnen. Der Betrag seines Gesamtimpulses beträgt
unter der Annahme einer Durchschnittsgeschwindigkeit v gerade pges = mv. Da die
Geschwindigkeit v konstant ist, ist auch der Betrag des Impulses unveränderlich. Davon hat die parallel zur Ekliptik liegende Komponente den Wert mv cos α = mvµ.
Im interplanetaren Raum bleibt die Teilchenzahl erhalten. Man kann daher für die-
22
ses Konglomerat die entsprechende Liouvillegleichung (1.3) aufstellen. Hierbei wird
zunächst von einer eindimensionalen Bewegung entlang s, also der Führungsfeldlinie,
ausgegangen. Damit erhält man Gleichung (2.1).
∂f ds
∂f d(µmv)
∂f
+
+
= 0
∂t
∂s dt ∂(µmv) dt
(2.1)
An den Emissionspunkten, also den Orten der Sonnenoberfläche, an welchen die
Teilchen in den interplanetaren Raum abgegeben werden, ist auf der rechten Seite
entsprechend Abschnitt 1.1 ein Quellterm Q(s, z, t) zu addieren.
Mit
dm
dt
=
dv
dt
= 02 ergibt sich
∂f d(mvµ)
1 ∂f ∂(mvµ) dµ
∂f dµ
=
=
∂(mvµ) dt
mv ∂µ ∂µ dt
∂µ dt
ds
dt
ist die zur Feldlinie parallele Komponente der Teilchengeschwindigkeit v. Entsprechend dem Impuls genügt diese der Gleichung (2.2).
ds
= v cos α = vµ
dt
(2.2)
Unter Berücksichtigung all dieser Erkenntnisse gelangt man zur Gleichung (2.3).
∂f
∂f dµ
∂f
+ µv
+
= Q (s, z, t)
∂t
∂s ∂µ dt
(2.3)
Hierin beschreibt der zweite Term von links die Konvektionsbewegung parallel zur
Feldlinie und der dritte die Fokussierung des Teilchenflusses. dµ
ergibt sich dabei zu
dt
1−µ2
v 2λ mit λ als der Fokussierungslänge (Vgl. Abschnitt 2.2.2).
Um die im Abschnitt 2.1 dargestellte
Pitchwinkeldiffusion
zu erfassen, muss der
∂f
∂
Gleichung ein weiterer Term − ∂µ κ (µ) ∂µ hinzugefügt werden. Die Gestalt dieses
Termes wird in Abschnitt 2.2.3 erklärt.
Wie in Abschnitt 2.2.4 dargelegt, kann der Transport senkrecht zur Führungsfeldlinie
ebenfalls als diffusiv angenommen werden, seine mathematische Beschreibung erfolgt
analog zu der Pitchwinkeldiffusion. Wie dort erfolgt die Berücksichtigung also durch
∂
Addition eines Termes − ∂z
κ (s, z) ∂f
zu der Gleichung (2.3).
∂z
2
Masse muss erhalten bleiben, es treten keine beschleunigenden Kräfte auf, siehe Abschnitt 1.2.1.
23
Man erhält somit Alles in Allem
∂f
∂f
∂
∂f
+ µv
−
κ (s, z)
+
∂t
∂s ∂z
∂z
∂
∂f
v (1 − µ2 ) ∂f
−
κ (µ)
= Q (s, z, t, µ)
2λ
∂µ ∂µ
∂µ
(2.4)
Diese Gleichung wurde (ohne Querdiffusion) von Roeloff aufgestellt und wird daher
oft als die Roeloffgleichung bezeichnet. Sie wurde in [Lampa 2006] um den Quertransport erweitert und nennt sich in der obigen Form die erweiterte Roeloffgleichung. Es
ist anzumerken, dass der Transport parallel zu der Führungsfeldlinie den Transport
senkrecht dazu um Größenordnungen übertrifft.
Die hier eingehenden Prozesse führen letztendlich dazu, dass die transportierten Partikel in ihrer Bewegung entlang einer Feldlinie gestört werden, ihre Bewegungsrichtung im Extremfall umkehren und weiterhin senkrecht zu ihrer Bewegungsrichtung
abgelenkt werden. In der Ekliptik lassen sich mittlere freie Weglängen als Maße der
Störungen durch die Diffusionsvorgänge einführen. In Fall der mittleren freien Weglängen entlang einer Feldlinie lassen sich diese als die Wegstrecke, die ein Teilchen
im Mittel zurücklegen kann, bevor es reflektiert wird, bevor also sein Pitchwinkel
sich um π2 ändert, interpretieren. Beim s-Transport ist diese Weglänge λk durch
Gleichung (2.5) definiert.
3
v
λk (s) =
8
Z
2
(1 − µ2 )
dµ
κ (s, µ)
(2.5)
[−1,1]
Die mittlere freie Weglänge λr in radialer Richtung ist hiermit über Gleichung (2.6)
verknüpft.
λr (r) = λk (r) cos2 ϑ (r)
(2.6)
2.2.2 Fokussierung
Es verbleibt, den Ausdruck für dµ
zu begründen. Dazu betrachtet man einen Teildt
chenfluss mit identischem Pitchkosinus µ und Gesamtmasse m und geht am Besten
wiederum von der ersten adiabatischen Invariante aus, also der Feststellung, dass
das magnetische Moment M unter den hiesigen Voraussetzungen nahezu konstant
ist:
24
dM
=0
dt
Mit der Definition des magnetischen Moments gemäß (1.33) findet man zunächst
2
d
d mv⊥
M =
=
dt
dt 2B
m (1 − µ2 ) v 2 dB
dµ 2
0 = −
+µ v
B
2B
dt
dt
(2.7)
(2.8)
2
wobei hier von der Tatsache Gebrauch gemacht wurde, dass v⊥
= v 2 sin2 α =
ds
v 2 (1 − cos2 α) = v 2 (1 − µ2 ) gilt. Mit dB
= ∂B
sowie ds
= µv folgt weiter
dt
∂s dt
dt
−
1 − µ2 2 ∂B 1 ds
dµ
dµ ds
v
= µ v2 = v
2
∂s B dt
dt
dt dt
dµ
1 − µ2
= v
dt
2λ
(2.9)
λ ist die in Abschnitt 1.2.5 definierte Fokussierungslänge.
2.2.3 Pitchwinkeldiffusion
Wie in Abschnitt 2.1 erwähnt, nimmt man an, dass sich die Pitchwinkelverteilungsdichte µf ändert, als würden die Teilchen im Pitchwinkelraum diffundieren. Sie
∂f
abwärts folgen.
sollten also dem Gradienten ∂µ
f dµ
kann als die entsprechende Flussdichte betrachtet werden. Den Anteil der Pitchwindt
keldiffusion df
an der Dichteänderung beschreibt somit eine Gleichung der
dt P W D
Form (1.4):
df
dt
PWD
∂
=−
∂µ
∂f
κ(µ)
∂µ
(2.10)
Der Term muss zur Gleichung (2.3) addiert werden.
Die Gestalt des Diffusionskoeffizienten κ lässt sich aus der quasilinearen Theorie
herleiten, da für diese Arbeit die Gestalt dieses Koeffizienten eine untergeordnete
Rolle spielt, sei hier lediglich auf [Hatzky 1996] verwiesen.
25
2.2.4 Querdiffusion
Das interplanetare Feld ändert sich räumlich nur langsam, so dass es lokal als homogen angesehen werden kann. Wie bereits beschrieben, wird ein geladenes Teilchen
~ 0 um sein Führungszentrum, welches einer Feldlinie
im Raum im Hintergrundfeld B
~ 0 (t) beschrieben werden.
folgt, gyrieren. Diese Trajektorie kann durch die Funktion X
~ 0 jedoch von stochastischen FeldfluktuatioIm interplanetaren Feld wird das Feld B
~ s (~x, t) überlagert, so dass das man an jedem Raumpunkt ein effektives Feld
nen B
~0 + B
~ s (~x,t) wahrnimmt. Dies wird die Teilchentrajektorie X(t)
~
B
ebenfalls beeinflussen. Nimmt man an, dass diese die Gestalt
~
~ 0 (t) + X
~ 1 (t, Bs ) + X
~ 2 (t,Bs2 ) + . . .
X(t)
=X
~ s sind, so kann man
~ 1, X
~ 2 , die linear, quadratisch usw. in Bs = B
mit Summanden X
in erster Näherung alle Terme höherer Ordnung in Bs vernachlässigen. Durch Lösen
~ 1 (Bs , t) ermitteln. Geht man
der Bewegungsgleichung für diese Situation kann man X
zurück auf die Bewegung des Teilchens als eine Gyration um ein Führungszentrum,
so findet man letztlich als Konsequenz dieser stochastischen Störungen, dass das
Führungszentrum in der Ebene senkrecht zum Magnetfeld eine ebenfalls stochastische Bewegung beschreibt. Durch Summation dieser zunächst geringen Verschiebungen des Führungszentrums kann das Teilchen so weit von seiner ursprünglichen
Führungsfeldlinie abkommen, dass es effektiv von seiner eigentlichen Flussröhre in
eine benachtbarte Röhre übertritt. Diese Bewegung senkrecht zum Hintergrundfeld
hat diffusiven Charakter und wird daher mathematisch ebenso beschrieben.3
Der Transportgleichung muss letztendlich ein diffusiver Term der Art
∂
∂f
κ
∂z
∂z
hinzugefügt werden.
Sei B0 = 1c EQtot β mit Etot als der relativistischen Gesamtenergie und Q als der Gesamtladung des Teilchens. Für den senkrechten Transport besitzt der Diffusionskoeffizient im homogenen Feld dann die Gestalt Gleichung (2.11) (Vergleiche [Jokipii
1966], Formel (29) und (23)).
κ (β) =
1 1
4v β 2
Z
1
dµ KF P
µ
(2.11)
[0,1]
Dabei ist v der Betrag des Geschwindigkeitsvektors des betrachteten Teilchens. Geht
man davon aus, dass KF P hinreichend wenig von β abhängt, so gilt
3
Dieser Effekt wird als “Field Line Random Walk” bezeichnet, da das Teilchen sich verhält, als
würde seine Führungsfeldlinie zufällige Zitterbewegungen senkrecht zum Feld ausführen.
26
κ (β) ∼
1
β2
(2.12)
Ist die räumliche Ausdehnung der Störungen4 sehr viel größer als der Lamorradius des betrachteten Teilchens, so wird in [Jokipii 1966] mit Gleichung (38) gerade
eine Beziehung (2.12) zwischen Diffusionskoeffizienten κ und der Feldstärkenänderung β hergeleitet. Im allgemeinen Fall gilt dies zwar nicht, doch wird hier als erste
Näherung von einer Beziehung der Art (2.12) ausgegangen. Für einen vom Ort unabhängigen Diffusionskoeffizienten ergibt sich damit die DGL (2.13) für den reinen
Quertransport.
∂f
∂t
=
κ̃ ∂ 2 f
β 2 ∂z 2
(2.13)
Sei f (z, t) eine Lösung dieser DGL.
Betrachtet man nun zwei Messpunkte p1 = 05 und p2 , so beträgt die Dichte an den
Punkten f (0, t) bzw. f (p2 , t). Nun widme man sich der Situation, dass p2 um den
Faktor 1/a an den Punkt p1 heranrückt. Die Dichte an dem Punkt p̃2 = pa2 beträgt
dann bei sonst unveränderten Bedingungen f ( pa2 ,t) bzw. die Änderung der Dichte
durch die Kontraktion des Abstandes beider Punkte voneinander ∆f = f (p2 , t) −
f ( pa2 ,t). Nimmt man allerdings an, dass zugleich der Diffusionskoeffizient κ um a12
absinkt, so erhält man für die resultierende DGl
κ ∂2g
∂g
= 2 2
∂t
a ∂z
die Funktion g(z, t) = f (az, t) als Lösung. Beim Zusammenrücken der Punkte wie
oben geschildert ergibt sich damit als Änderung der Dichte am verschobenen Punkt
p2 gerade
p2
∆f = f (p2 , t) − g( , t) = f (p2 , t) − f (p2 , t) = 0
a
Falls der Diffusionskoeffizient also bei der Kontraktion der räumlichen Dimension
um einen Faktor a1 gerade um a12 sinkt, ändert sich die sich aus der Diffusion ergebende Verteilung nicht. Führen durch die Punkte p1 und p2 Feldlinien senkrecht zur
Diffusionsachse, so bedeutet eine Kontraktion des Abstandes zwischen den Feldlinien um einen Faktor a1 gerade eine Erhöhung des Feldbetrages um eben einen Faktor
a.
4
5
Genauer wird verlangt, dass die Korrelationslänge sehr viel größer als der Lamorradius ist.
Das p1 gleich 0 gesetzt ist, erfolgt ohne Beschränkung der Allgemeinheit und dient lediglich der
Vereinfachung der Gleichungen, da so p2 − p1 = p2 gilt.
27
Unter den gemachten Annahmen wirkt sich die Erhöhung des Magnetfeldbetrages
effektiv nicht auf die Dichteverteilung bezüglich der Feldlinien aus. Zu beachten ist,
dass sich die Verteilung bezüglich des Raumes durchaus ändert. Misst man jedoch
immer auf einer Feldlinie, so sollte man immer dieselben Werte erhalten, unabhängig
davon, wie die Feldlinie senkrecht zu ihrem Verlauf bezüglich der übrigenn Feldlinien
verschoben wird. Die Dichteverteilung entlang einer Feldlinie ändert sich also nicht,
wenn die Feldlinien dichter zusammen rücken.
Den Ergebnissen aus [Jokipii 1966] die Annahme schwacher 6 , aber über relativ weite
Distanzen korrelierter und echt stochastischer Magnetfeldfluktuationen zu Grunde.
Weiterhin ist die Argumentation streng nur aufrechtzuerhalten, falls der Diffusionskoeffizient κ nicht von z selbst abhängt, da sich ansonsten die DGL (2.13) in ihrer
Gestalt anders darstellte. Dies ist nur bei lokal gleichmäßiger Kompression möglich. Ansonsten müsste die Änderung des Diffusionskoeffizienten und so auch der
resultierende Koeffizient vom Ort abhängen.
Trotz dieser Einschränkungen erscheint das Grundprinzip anschaulich jedoch einleuchtend. Ein starkes Magnetfeld führt zu einem geringen Lamorradius eines gyrierenden Teilchens, das Teilchen befindet sich somit dicht bei seiner Führungsfeldlinie.
Gleichzeitig sind die Flussröhren in einem starken Feld stark konzentriert. Bei einem
schwachen Feld gilt Entsprechendes. Effektiv sollte sich die Wahrscheinlichkeit, dass
das Teilchen also durch eine Feldfluktuation in eine benachbarte Flussröhre gerät,
nicht wesentlich ändern.
2.3 Lösungsmethodik
2.3.1 Differenzenverfahren
Die Komplexität der Transportgleichung (2.4) verhindert in allen bis auf einigen
degenerierten Fällen ihre analytische Lösung. Die Suche nach einer Lösung muss
also über ein numerisches Verfahren führen. Hierzu existieren mehrere Methodenklassen, von denen eine der am weitesten verbreiteten sicherlich die Methode der der
finiten Differenzen ist. Diese wird auch hier benutzt, da für die Transportgleichung
auf die entsprechenden Ergebnisse aus [Lampa 2006] zurückgegriffen werden kann,
welche von der Aufstellung entsprechender Schemata bis hin zu einer FORTRANImplementation, dem Programm GREF reichen. Allen ist gemeinsam, dass sie jeweils
nur Näherungslösungen liefern und jede Verfahrensklasse verschiedene Stärken und
Schwächen aufweist. Finite-Differenzen-Verfahren sind dabei relativ leicht anzuwenden, liefern aber nicht notwendigerweise verwertbare Näherungslösungen. Hier muss
man von Fall zu Fall prüfen, ob und unter welchen Bedingungen eine für ein konkretes Verfahren ausgearbeitete Methode praktikabel eingesetzt werden kann. Die
grundlegende Idee bei diesen Verfahren ist dabei, den Phasenraum zu diskretisieren
6
Für die Präzisierung dieses Begriffes sei wiederum auf [Jokipii 1966] verwiesen.
28
und so Differentialquotienten in den zu behandelnden Gleichungen in Differenzenquotienten zu überführen, um das ursprüngliche Problem letztlich auf das Lösen
eines linearen Gleichungssystemes zu reduzieren. Im vorliegenden Fall besitzt man
die Differentialgleichung (2.4) der Form
L [f (~x)] = Q (~x) , ~x = (s, z, t, µ) ∈ R4 , f ∈ C 2 R4 , R
(2.14)
L ∈ {C 2 (R4 , R) −→ {R4 −→ R}} ist dabei der Differentialoperator
∂
∂
∂
∂
L =
+ µv −
κ (s, z)
+
∂t
∂s ∂z
∂z
∂
∂
v (1 − µ2 ) ∂
−
κ (µ)
2λ
∂µ ∂µ
∂µ
und Q die bereits bekannte Injektionsfunktion. Dabei muss man sich bei der Suche nach numerischen Lösungen auf eine kompakte echte Teilmenge K des R4 beschränken. Für den so notwendigerweise auftretenden Rand ∂K sind entsprechende
Randbedingungen aufzustellen:
k f,
∂f
∂xi
!
,∂K
= 0
(2.15)
i∈{1,2,3,4}
In der Regel ist k dabei eine in all ihren Argumenten lineare Funktion. Es sei darauf
hingewiesen, dass man nicht für jede Art Differentialgleichung Bedingungen für den
gesamten Rand zur Verfügung stellen muss. Bei vielen praktischen Problemen genügt
z.B. bzgl. der zeitlichen Dimension die Vorgabe von Anfangswerten. K ist nun zu
diskretisieren, d.h. man wählt ein geeignetes Gitter
ω ⊂ K , γ = (ω ∩ ∂K)
Und “diskretisiert” alle auftretenden Funktionen wie Q durch entsprechende Einschränkungen
Q̃ = Q|ω
(2.16)
29
Differentialquotienten sind auf diskreten Mengen nicht definiert, so dass man im Falle
des Operators L nicht mit einer einfachen Einschränkung weiterkommt. Stattdessen müssen diese Quotienten auf geschickte Art durch diskrete Äquivalente ersetzt
werden. Da der Operator L linear in f ist, kann man jeden einzelnen Differentialausdruck getrennt betrachten. Man entwickelt hierzu die gesuchte, noch unbekannte
Lösung f in einer Taylorreihe nach der entsprechenden Variablen bis zum notwendigen Glied und erhält nach Umformung einen entsprechenden Ausdruck. Für den
∂f
Differenzenquotienten ∂µ
könnte folgendermaßen vorgegangen werden:
∂f 2
f (µ1 ) = f (µ0 ) + (µ1 − µ0 )
+
O
(µ
−
µ1)
1
∂µ µ0
f (µ1 ) − f (µ0 )
∂f =
+ O (µ1 − µ0 )
=⇒
∂µ
µ1 − µ0
(2.17)
µ0
für zwei “Punkte” µ0 und µ1 . Führt man die Diskretisierung für alle Differenzenquotienten in allen Variablen entsprechend aus, so erhält man letztendlich eine diskrete Version von L und den Randbedingungen k. Die Lösung wird auf der Domäne
ω = {si , 1 ≤ i ≤ S} × {zi , 1 ≤ i ≤ Z} × {ti , 1 ≤ i ≤ T } × {µi , 1 ≤ i ≤ M } gesucht.
Da diese diskrete Menge kompakt ist, ist die Menge der in ihr enthaltenen Punkte
|ω| endlich. Man kann die gesuchte diskrete Lösungsfunktion f |K als einen Vektor
(yi(l,m,n,o) ) mit i(.) : {1 ≤ i ≤ S} × {1 ≤ i ≤ Z} × {1 ≤ i ≤ T } × {1 ≤ i ≤ M } −→
{1 ≤ i ≤ SZT M } als einer geeigneten Zuordnung interpretieren. L lässt sich dann
als Matrix darstellen und man erhält für das Gleichungssystem (2.14) die diskrete
Form (2.18).
L̃~y = ~q,
~y = (f (zl ,sm , tn , µo ))
i(l,m,n,o)
~q = Q̃ (zl ,sm , tn , µo )
k̃ = k|R×R×γ
i(l,m,n,o)
k̃ = 0,
(2.18)
Man wird bestrebt sein, die Diskretisierung so durchzuführen, dass L̃ nur in der
Haupt- sowie einigen Nebendiagonalen besetzt ist. Normalerweise ist dies bei eindimensionalen Problemen leicht zu bewerkstelligen, da die Differenzenquotienten nur
von einer begrenzten Zahl Nachbarpunkte abhängen. Mehrdimensionale Problemstellungen werden dies in der Regel nicht zulassen. Ist der betreffende Differentialoperator L jedoch linear in der gesuchten Funktion f , so kann man ihn in eindimensionale Teilprobleme zerlegen und die Gesamtlösung durch Aufsummieren der
Teillösungen bilden. Dies wird an der Transportgleichung im Abschnitt 2.3.2 vorgenommen und hier daher nicht weiter erläutert. Man spricht von dem Gleichungssystem (2.18) als Schema, welches nun wie jedes gewöhnliche Gleichungssystem gelöst
30
werden kann. Sinnvoll ist dieses Vorgehen allerdings nur, falls der erhaltene Lösungsvektor ~y die Lösung f der Differentialgleichung (2.4) hinreichend gut auf K
approximiert, also
f (sl , zm , tn , µo ) ≈ yi(l,m,n,o) ∀ (sl , zm , tn , µo ) ∈ K
gilt. Dies kann allgemein nicht nur nicht garantiert werden, es ist sogar durchaus die
Regel, dass ein Schema unter gewissen Umständen versagt, die gefundene diskrete
Funktion ~y sich völlig anders als die exakte Lösung f verhält. An jedes Schema sind
daher folgende Qualitätskriterien anzulegen:
1. Konsistenz : Der diskrete Operator muss für gegen 0 strebende Abstände der
Gitterpunkte gegen den approximierten Differentialoperator streben. Der Differenzenquotient (2.17) beispielsweise konvergiert mit O(µ1 − µ0 ) gegen den
entsprechenden Differentialquotienten.
2. Konvergenz : yi(l,m,n,o) muss für fest gegebene (zl , sm , tn ) bei µ1 − µ0 → 0 gegen
f (zl , sm , tn , µo ) für alle o aus der entsprechenden Indexmenge gehen. Entsprechendes muss für s, z, t gelten.
3. Stabilität: Kleine Störungen dürfen nicht beliebig verstärkt werden.
2.3.2 Diskretisierung der Transportgleichung
Die Diskretisierung der Transportgleichung (2.4) erfordert zunächst eine Diskretisierung der Domäne, also die Wahl eines geeigneten Gitters in der Ekliptikebene sowie
eine Diskretisierung der Zeit. Hierbei wurde der Geometrie des interplanetaren Feldes
entsprochen und die Gitterpunkte also wie in Abbildung 2.1 auf entsprechenden Spiralarmen angeordnet. Die Verbindungslinien zwischen zwei benachbarten Feldlinien
stehen überall senkrecht zur Magnetfeldrichtung. Die Abstände auf den Feldlinien
werden nun so gewählt, dass die Gitterpunkte auf den Schnittpunkten der Feldlinien
mit eben diesen Verbindungslinien liegen. Diese räumliche Diskretisierung ist offensichtlich nicht äquidistant, so dass hier mit besonderer Vorsicht vorzugehen ist. Man
beschränkt sich hierbei auf einen gewissen Teilsektor der Spirale und eine maximale
Bogenlänge der dort anzutreffenden Feldlinien. Die seitlichen Ränder dieses Sektors werden aus Gründen der Dichteerhaltung als teilreflektierend bzw. periodisch
angesetzt(Siehe [Lampa 2006, Abschnitt 5.3.2]). Die noch fehlende Randbedingung
für den inneren Rand wird durch die Annahme voller Reflexion am selben gegeben. In der Zeitkoordinate wurde die Transformation t −→ τ = tv mit v als der
in Abschnitt 2.2 eingeführten Teilchengeschwindigkeit durchgeführt und das zu betrachtende Zeitintervall in äquidistante Intervalle geteilt. Die DGl (2.4) selbst kann
wie in Abschnitt 2.3.1 bereits erwähnt für jede Transportart gesondert diskretisiert
werden. Die erhaltenen Teildichten können anschließend einfach zur Gesamtdichte
aufaddiert werden. Der s-Transport
∂f
∂f
= µv
∂t
∂s
31
Abbildung 2.1: Bei der Diskretisierung der Transportgleichung benutztes Raumgitter.Quelle: Florian Lampa
wird mittels einer Kombination aus dem Lax-Wendroff-Verfahren (2.19) und Methoden zur Vermeidung numerischer Oszillationen diskretisiert.
xs,τ +1 = xs,τ
γ
−
2
xs+1,τ +1 − xs−1,τ
γ2
(xs+1,τ − xs,τ + xs−1,τ )
+
2
(2.19)
Aus Gründen der Übersichtlichkeit bezeichnet s hier nicht den aktuellen Wert, sondern den Index für die s-Dimension. Entsprechendes gilt für die anderen drei Variablen. Diese Indizes sind nicht mit den Werten der Variablen gleichen Namens
zu verwechseln. In γ geht dabei mit den Abständen (∆s)s die Gitterstruktur mit
ein. Das Verfahren ist implizit und daher rechnerisch relativ aufwändig. Weiterhin
ist die Stabilität nur garantiert, falls die Bedingung von Lax-Richtmyer (2.20) und
von courant-Friedrichs-Levy (2.21) erfüllt ist. µi sind jeweils die diskreten Werte des
PWDK. Das Verfahren ist von zweiter Ordnung.
∆s
∆τ ≤
|µv|
∆τ ≤ 1
max µi
∆s 32
(2.20)
(2.21)
Der µ-Transport
∂f
v (1 − µ2 ) ∂f ∂
+
∂t
2λ
∂µ ∂µ
∂f
κ
∂µ
=0
wird durch das implizite Il‘jin-Schema diskretisiert. Dieses ist ein relativ komplexes
und seine exakte Gestalt in diesem Zusammenhang unwichtig, so dass hier auf die
Ausformulierung verzichtet wird. Das Schema ist in [Lampa 2006, Abschnitt 4.2] dargestellt. Wichtig ist, dass dieses um stabil zu sein die Erfüllung der Bedingung (2.22)
erfordert.
λ ≥ ∆τ
∆µ
1+
2
und
v (1 − µi ) 1 ≤2
max i
2λi
κi (2.22)
κi sowie λi sind hierbei die Werte des Pitchwinkeldiffusionskoeffizienten bzw. der
Fokussierungslänge am Gitterpunkt i.
Die Konvergenz des Schemas ist von der Stärke der Diffusion abhängig und liegt für
eine Geringe bei Eins, für eine Starke bei Zwei.
Der z-Transport
∂f
∂
=
∂t
∂z
∂
κ(s, z) f
∂z
wird mit dem Dreipunkteschema (2.23) diskretisiert.
xz,τ +1 =
κ (s, z)
(Θ (xz+1,τ +1 − 2xz,τ +1 + xz−1,τ +1 )) +
∆z
κ (s, z)
((1 − Θ) (xz+1,τ − 2xz,τ + xz−1,τ ))
∆z
(2.23)
Θ ist hierbei zu 1 gewählt und entspricht dann dem Laasonen-Verfahren. Es ist
bedingungslos stabil und besitzt die Konsistenzordnung 1 bezüglich z, bezüglich τ
die Ordnung 2.
Die diskrete Injektionsfunktion Q̃ gibt die Werte der Phasenraumdichte an der inneren, also der Sonne zugewandten Domänengrenze {(s1 , zm , tn , µo ) ∈ K} an. Die
Werte der Funktion Q̃ sind dabei für jeden Zeitschritt vorzugeben und werden entsprechend direkt auf den entsprechenden Teil des Lösungsvektors (yi(1,m,n,o) ) aufaddiert.
Diverse wichtige Details wie die Ermittlung verschiedener Faktoren sind in dieser
Überschau unterschlagen worden. Sie finden sich in [Lampa 2006, Abschnitt 5.3].
33
2.4 Intensität und Anisotropie
Die Teilchendichte f ist Messungen nicht direkt zugänglich. Man charakterisiert
Teilchenströme daher durch ihre differentielle Intensität und Anisotropie. Die differentielle Intensität
I (~x, E, Ω, t) dt dE dΩ dσ
gibt dabei die Zahl der Teilchen an, welche durch eine gegebene Fläche σ in der Zeit
dt und mit Energien Ei ∈ [E, E + dE] hindurchtreten. Dabei finden die Teilchen
Beachtung, deren Bewegungsrichtung einen Raumwinkel Ω = (Ω1 , Ω2 ) ∈ [Ω̃1 , Ω̃1 +
dΩ1 ]×[Ω̃2 , Ω̃2 +dΩ2 ] senkrecht zur betrachteten Ebene σ aufweisen. Die differentielle
Intensität I steht dabei mit der Phasenraumdichte f über die Beziehung (2.24)
in Zusammenhang, wobei p den jeweiligen Impuls eines Teilchens der Energie E
darstellt und bereits von einer rein zweidimensionalen Situation ausgegangen wird,
so dass der Raumwinkel auf ein Skalar kollabiert und als Pitchkosinus µ angegeben
werden kann.
I (s, z, E, µ, t) = p2 f (s, z, t, µ)
(2.24)
Die Intensität liefert also eine Aussage über die absolute Zahl der im Strom zu einem
gewissen Zeitpunkt und Ort anzutreffenden Teilchen. Gemeinhin misst man diese,
indem man die auf eine Fläche A einfallenden Teilchen eines gewissen Energiebandes
[E1 : E2 ] über ein Zeitintervall [t1 : t2 ] zählt. Die gemessene Intensität I folgt dabei
Gleichung (2.25).
Z
Z
Z
Z
I=
I (s, z, E, µ, t) dt dE dµ dσ
(2.25)
A [−1:1] [E1 :E2 ] [t1 :t2 ]
Daneben ist für jeden Strom aber auch die Verteilung der Bewegungsrichtungen
seiner Teilchen charakteristisch. Die Anisotropie A gibt darüber Auskunft. Deren
Betrag ist als der normierte Mittelwert der Intensität bezüglich der Winkelverteilung
wie in Gleichung (2.26) angegeben.
R
I(s, z, E, µ, t)µdµ
[−1,1]
|A (s, z, E, t)| = 3 R
I(s, z, E, µ, t)dµ
(2.26)
[−1,1]
Die Anisotropie kann so definiert Werte zwischen 0 und 3 annehmen. Dabei besagen Werte nahe Null, dass die Teilchen sich gleichmäßig in jede Richtung bewegen
34
(der Begriff Strom ist in diesem Falle vermutlich nicht mehr angebracht), 3 bedeutet
einen vollständig gerichteten Teilchenstrom. Man führt die Konvention ein, dass für
eine gerichtete Bewegung mit einer antiparallel zur Polarität des Magnetfeldes verlaufenden Bewegung A < 0 ist. Im Allgemeinen erhält man über Messungen nur eine
endliche Zahl diskreter Stichproben Ii ∆E∆µi ∆t∆σ vom Verlauf der Intensität. Eine
Möglichkeit, die Anisotropie näherungsweise zu erhalten, ist die Definition (2.26) zu
verwenden, wobei man die Integrale bezüglich des Zählmaßes auswertet und diese
so effektiv in endliche Summen übergehen lässt:
P
Ii µi
i
P
A =
(2.27)
Ii
i
35
3 Magnetische Wolken
3.1 Definition
Abbildung 3.1: Typische Messdiagramme einer Sonde beim Durchfliegen einer magnetischen Wolke (9. bis 11. November 2004). Der Beginn der Wolke ist mit “in”,
mögliche Enden mit “out1” bis “out3” gekennzeichnet. Quelle: [Dasso u. a. 2007]
Im vorangegangen Abschnitt wurde erwähnt, dass die Struktur des interplanetaren
Magnetfeldes als im Wesentlichen regelmäßig angenommen werden kann. Dennoch
werden von Satelliten immer wieder großskalige Störungen dieses Feldes registriert.
Für eine Klasse dieser Störungen führte Burlaga 1981 in [Burlaga u. a. 1981] den
Begriff magnetische Wolke (engl. “magnetic cloud”, kurz “MC”) ein.
Die von ihm gewählte Definition beruht auf der Gestalt der von Satelliten in Abständen von unter 1 AU bis zu mehreren AU gelieferten Daten. Grundsätzlich sind
von diesen nur punktuelle Messungen einzelner Parameter entlang ihrer Trajektorie möglich, so dass sich Diagramme wie in Abbildung 3.1 ergeben. Aufgenommen
wurde hier der Betrag des Magnetfeldes B, der Azimuth θB als Winkel zwischen Ma~ und Ekliptik, die Elevation ΦB als Winkel zwischen Feldvektor und
gnetfeldvektor B
der Ebene senkrecht zur Ekliptik, die Strömungsgeschwindigkeit v des Plasmas, die
36
Protonenzahldichte nP sowie das Plasma-βP (Plasma-β der Protonenpopulation)1 .
Kennzeichnend für eine magnetische Wolke sind dabei:
1. Ein stark erhöhter Betrag des Magnetfeldes, wie ihn eben jenes Diagramm,
beginnend bei Stunde 20 (“in”) bis ca. Stunde 40, zeigt.
2. Eine gleichmäßige Rotation des Magnetfeldvektors, was sich im Diagramm im
Intervall zwischen Stunde 20 (“in”) und kurz nach Stunde 30 (“out”) durch den
Abfall der Elevation θB von ca. + 90◦ auf ca. −90◦ und somit einer Rotation von
nahezu 180◦ ausdrückt. Nach Durchlauf durch die Wolke hat sich die Richtung
des Magnetfeldes also nahezu invertiert.
3. Eine stark herabgesetzte Protonentemperatur, dass das Plasma-βp 1 ist.2
Das Magnetfeld bestimmt somit die Dynamik im von der Wolke eingenommenen Bereich.
Das wolkeninterne Magnetfeld schwächt sich mit zunehmenden Abstand von der
Sonne ab. Typischerweise nimmt es bei einer Entfernung von 1 AU eine Stärke von
20 − 30 nT, bei 2 AU nur mehr ungefähr 10 nT an (Siehe [Osherovich u. a. 1993]).
In der Regel ist außerdem auch der Plasmadruck in der Wolke im Vergleich zum Außenbereich herabgesetzt. Dies ist aber kein Identifikationskriterium, da z.B. gerade
das hier beispielhaft erläuterte Ereignis dieses Merkmal nicht zeigt.
Die Häufigkeit derartiger Wolken wird unterschiedlich angegeben, [Wu u. Lepping
2007] nennen ∼ 9 entdeckte Wolken pro Jahr, wobei dies auf Grund von potentiell
beliebig vielen unentdeckten Wolken als untere Grenze anzusehen sein dürfte. Die
Identifikation gestaltet sich bereits schwierig, wenn die messende Sonde nicht das
Zentrum der Wolke passiert, da dann beispielsweise die Rotation des Feldvektors
nur mehr unvollständig aufgenommen wird.3
3.2 Eigenschaften
3.2.1 Vermutete Struktur
Tatsächlich ist die oben gegebene Definition für magnetische Wolken geeignet, von
Satelliten aufgenommene Ereignisse als magnetische Wolken identifizieren zu können. Der erhöhte Magnetfeldbetrag sowie das erniedrigte Plasma-β liefern außer
der Tatsache, dass es sich hierbei um ein im Wesentlichen magnetisches Phänomen handelt, wenig Greifbares. Die Rotation des Feldvektors legt eine so genannte
Flussseilkonfiguration (“flux rope”) des Magnetfeldes als Ursache nahe. Dies ist eine Feldlinienstruktur, bei welchem sich wie in Abbildung 3.2 Feldlinien helixförmig
1
Definition siehe Gleichung (1.29)
Typischerweise β ≈ 0.1 oder noch darunter, siehe [Henke 1999].
3
Siehe folgenden Abschnitt.
2
37
Abbildung 3.2: Schematische Darstellung der Flussseilstruktur, wie sie für magnetische Wolken angenommen werden kann. Quelle: [Henke 1999]
um eine zentrale Feldlinie winden. Hierbei nimmt die Helizität der Feldlinien nach
außen hin zu, d.h. die Zahl der Windungen pro Längeneinheit steigt mit zunehmenden Abstand zur zentralen Feldlinie stetig, um sich zum Grenzbereich der Struktur
konzentrischen Kreisen zu nähern.
Dies würde zwingender Weise bei einer zentralen Durchquerung der Wolke zu einer
gemessenen Rotation des Feldvektors um 180◦ führen müssen. Dass dieser Wert in
vielen Fällen nicht erreicht wird, kann dadurch zu Stande kommen, dass die Trajektorie der betreffenden Sonde das Zentrum der Wolke verfehlt. Die Struktur ist in sich
geschlossen, man nimmt allgemein an, dass dieses “Seil” während seiner gesamten
Existenz mit der Sonne verbunden bleibt. So gibt Burlaga in [Burlaga 1995], Abschnitt 6.3.2 die dauerhafte Verbindung der Wolke mit der Sonne als wahrscheinlich
an, erklärt aber auch, dass andere Konfigurationen durchaus möglich sind. Auch
andere Autoren interpretieren Daten nur vorsichtig dahingehend, dass die sie verursachenden Flussseile noch mit der Sonne verbunden sind.4 Als positiven Hinweis auf
eine noch bestehende Verbindung werden immer wieder bidirektionale, also sich entgegen gerichtete Ionenströme, wie sie immer wieder innerhalb magnetischer Wolken
gemessen werden, angeführt. Diese können jedoch auch in torusartigen Feldlinienstrukturen auftreten. Einige Autoren nehmen auch eine ebensolche Torusstruktur
an, welche sich beispielsweise durch das Ablösen des Flussseils von der Sonne, möglicherweise durch Rekonnexion5 ergeben könnte.
Voll akzeptiert ist dagegen die Flussseilstruktur als solche, sie wird generell angenommen, teils gar als Definitionsmerkmal einer magnetischen Wolke angesehen.
Man vergleiche u.A. [Bothmer u. Schwenn 1997], die in der Einleitung von [Quan4
5
Vergleiche [Foullon u. a. 2007].
Siehe Abschnitt 1.2.4.
38
Abbildung 3.3: Vermutete großskalige Struktur einer magnetischen Wolke. Quelle:
[Stepanova u. Kosovichev 1993]
Lin u. a. 2003] gemachten Aussagen, [Jian u. a. 2006], speziell die Erläuterungen zu
der dort definierten Kategorie G1 von ICME oder auch [Henke 1999]. In [Kilpua
u. a. 2009] gelangen die Autoren nach Auswertung verschiedener Messdaten für eine
untersuchte Wolke zu einem relativ unregelmäßigen Querschnitt, was in Anbetracht
der realen, durchaus komplexen Situation nicht verwundert. Der Querschnitt eines
solchen Flussseils wird dennoch oft als kreisförmig oder zumindest ellipsoid angenommen. Numerische Simulationen, in denen die magnetische Struktur von Wolken
und dem sie umgebenden Feld untersucht wurden, scheinen diese Annahme hinsichtlich der Ergebnisse zu rechtfertigen (Siehe bspw. [Vandas u. Fischer 1995]).
Die Querschnittdurchmesser reichen hierbei bei 1 AU von 0.25 bis hin zu 0.5 AU.
Magnetische Flussseile treten in unterschiedlichster Lage und Orientierung auf.
3.2.2 Evolution einer magnetischen Wolke
Das Diagramm 3.1 zeigt den für magnetische Wolken typischen Abfall der Sonnenwindgeschwindigkeit von ihrer Vorder- zu ihrer Hinterkante. Man ist sich in der
Literatur anscheinend einig darüber, dass dies auf eine Expansion hindeutet, siehe
z.B. [Burlaga 1995] oder auch neuere Autoren wie [Kilpua u. a. 2009]. Genau besehen
ist dies auch lediglich eine Beschreibung der Messergebnisse. Da sich Teilchen am
Bug der Störung schneller fortbewegen als jene am Heck, entfernen sie sich effektiv
voneinander. Das Plasma als Ganzes expandiert. Dieses ist aber nur möglich, wenn
sich auch die magnetische Struktur, die dem Plasma seine Bewegungsrichtung vorgibt, ausdehnt. Details des Vorganges lassen sich allerdings wegen des oben genannten Problems, nur Punktmessungen durchführen zu können, nur sehr unvollständig
aus Messdaten rekonstruieren. In [Henke 1999, Abschnitt 2.3.2], wird basierend auf
der Auswertung von Messdaten, der mittlere Durchmesser ρ einer Wolke mit ihrem
Abstand r von der Sonne in Beziehung gebracht:
ρ ∼ r0.8
39
In [Lepping u. a. 2008] dagegen wird die Expansionsgeschwindigkeit vexp einfacher
als konstant und also von der Driftgeschwindigkeit vM C und dem Abstand rM C (tEN )
der Wolke von der Sonne zum Zeitpunkt tEN gemäß (3.1) abhängig genähert.
vexp =
rM C (tEN )
tEN + ∆t
(3.1)
∆t ist dabei ein Korrekturfaktor, der letztendlich die Tatsache, dass die Wolke bei
ihrem Austritt aus der Sonne bereits über einen gewissen Durchmesser verfügte,
einbezieht.
Magnetohydrodynamische Simulationen stützen diesen Befund, legen aber auch nahe, dass die Expansion nicht isotrop, sondern zunehmend tangential zur Achse Wolke
- Sonne erfolgt. Auch scheint das Expansionsverhalten unabhängig von der Lage der
Wolkenachse zu sein, wie die Artikel [Vandas u. Fischer 1995] und [Vandas u. a.
1996] zeigen. Erklären lässt sich die Anisotropie durch die Wechselwirkung mit dem
äußeren interplanetaren Feld. Durch die Bewegung der Wolke wird das äußere Feld
vorderhalb mehr und mehr komprimiert, wodurch der magnetische Druck beständig
zunimmt. Dadurch wird der Wolke in Expansionsrichtung ein Widerstand entgegengesetzt, so dass die Expansion in radialer Richtung zusehends gehemmt wird.6
Es folgt unmittelbar, dass der Wolkenquerschnitt nicht dauerhaft eine Kreisscheibe
darstellen kann. Ein solcher würde auf Grund der anisotropen Expansion zu einer
Ellipse entarten. Die Annahme kreisförmiger Querschnitte scheint jedoch in erster
Näherung berechtigt, vergleicht man die aus Daten rekonstruierten Schnitte in [Kilpua u. a. 2009], und erfolgt häufig.
Die Art der Wolkenbewegung ist bei Weitem unklarer, Messdaten erlauben hierauf
kaum Rückschluss. Hier muss man im Wesentlichen auf Simulationen zurückgreifen.
Es zeigt sich, dass die Wolke in Sonnennähe nahezu radial nach außen läuft, dann
jedoch unter Einfluss des umgebenden Feldes mehr und mehr von dieser Richtung
abkommt. Da die Bewegung wesentlich vom umgebenden Magnetfeld bestimmt wird,
sei hierzu auf Abschnitt 3.4.2 verwiesen. Ein Vergleich der Ergebnisse aus [Vandas u.
Fischer 1995] und dem Folgeartikel [Vandas u. a. 1996] zeigt, dass für die Entwicklung
der Wolke die Lage relativ zur Ekliptik kaum eine Rolle spielt. Die Geschwindigkeit,
mit der die Wolke sich nach außen bewegt, scheint sich relativ nahe der Sonne bereits
der des langsamen Sonnenwindes, also 400 bis 500 km/s, anzupassen, allerdings treten auch bedeutend schnellere Wolken auf.7 Insgesamt scheint die Geschwindigkeit
sich relativ bald kaum mehr zu ändern, so dass diese zumindest solange das Feld
keinen zu stark konzentrischen Verlauf besitzt, nahezu konstant bleibt. In der Regel
wird die Konstanz der Geschwindigkeit auch bei der Auswertung von Messdaten
angenommen. Die hier gemachten Aussagen gelten wie für die großskalige Struktur
6
7
Vergleiche hierzu Abschnitt 3.4.2.
[Wu u. Lepping 2007] berichten eine mittlere Maximalgeschwindigkeit von 477 km/s bei den
dort untersuchten Wolken. Vergleiche auch [Bothmer u. Schwenn 1997] oder [Kilpua u. a. 2009].
40
des interplanetaren Magnetfeldes nicht in unmittelbarer Nähe der Sonne, wie im
Abschnitt 3.3 noch gezeigt werden wird. Hat eine Wolke allerdings einmal die hier
beschriebene Struktur angenommen, zeigt sie sich ziemlich stabil. Magnetische Wolken wie sie hier beschrieben werden wurden teils noch in > 10 AU Entfernung von
der Sonne identifiziert (Vergleiche [Burlaga 1995, Abschnitt 6.6]).
3.3 Ursprung
Die Frage nach der Entstehung magnetischer Wolken erscheint derzeit in der Literatur8 noch mit vielen Fragen verknüpft. Unstreitig ist die Sonne als Quelle des
interplanetaren Feldes auch Verursacher dessen Störungen. Diese zeigt verschiedenste Arten von Ausbrüchen, d.h. Ereignissen, bei welchen große Mengen Energie und
Materie in den interplanetaren Raum abgegeben werden. Diese Energie kann in
Form heißen Plasmas abgegeben werden. Entsprechende Ereignisse werden allgemein als koronale Massenauswürfe (Coronal Mass Ejections) bezeichnet, da sie ihren
Ursprung in der Sonnenkorona haben. Eine andere Möglichkeit ist das Aussenden
eines starken Strahlungspulses. Derartige Pulse bezeichnet man als Flares. Da beide
Phänomene oft gemeinsam auftreten erscheint es durchaus wahrscheinlich, dass sie
zwei Symptome eines einzigen komplexeren Vorganges sind oder das eine das andere verursacht (Siehe [Aschwanden 2004]). Wie in [Kallenrode 2001], Kapitel 6.7.4
jedoch dargelegt, ist der letztendliche Zusammenhang noch ungeklärt.
Die Auffassung eines Zusammenhanges zwischen dem Auftreten von CMEn und
magnetischen Wolken vertritt Burlaga in [Burlaga 1995], Abschnitt 6.2.2, und stellt
fest: “The solar data are consistent with the hypothesis that all magnetic clouds
are associated with coronal mass ejections” (Ebenda). Auch andere Autoren bringen
magnetische Wolken mit CMEn in Verbindung, neuere Literatur wie [Kilpua u. a.
2009] oder [Jian u. a. 2006] bezeichnen magnetische Wolken als eine Unterklasse von
interplanetaren CMEn (ICME), d.h. CMEn, die außerhalb der Sonnenkorona im interplanetaren Raum angetroffen werden. In [Jian u. a. 2006] wird gar spekuliert, dass
möglicherweise alle ICMEn eine Flussseilstuktur besitzen und magnetische Wolken
darstellen, die lediglich auf Grund widriger Beobachtungsumstände nicht als solche
erkannt werden können. Gestützt wird diese These dadruch, dass zumindest einzelnen Wolken die entsprechenden CMEn auf der Sonne zugeordnet werden können
(Siehe [Kilpua u. a. 2009]).
Geht man von oben erwähnten Annahmen, dass Flares und CMEn zwei Aspekte des
selben Ereignistyps sind, verwundert es nicht, dass wie in [Burlaga 1995] magnetische
Wolken auch mit Flares in Verbindung gebracht werden. Leider scheint das Verhältnis der internen Struktur von CME und magnetischer Wolke noch nicht eindeutig
geklärt. Noch ist unsicher, welches der beiden Phänomene das andere verursacht
oder ob beide das Produkt eines dritten Vorganges sind. Auch zur Entstehung von
8
Zumindest soweit sie gesichtet wurde.
41
CMEn bestehen mehrere Modelle.9 Die meisten werden von verschiedenen Messungen gestützt, sind jedoch mit anderen nur schlecht vereinbar, so dass möglicherweise tatsächlich verschiedene Formungsmechanismen auftreten. Vielen ist gemeinsam,
dass Energie aus dem magnetischen Feld dazu dient, den Ausbruch zu befeuern.
Häufig werden CMEn in Zusammenhang mit verschwindenden Filamenten beobachtet. Da diese schleifenartige Plasmabögen auf der Sonnenoberfläche darstellen, die
entlang von ebensolchen magnetischen Feldlinienbögen laufen, basiert eine Reihe
dieser Modellmechanismen darauf, dass magnetische Schleifen plötzlich heftig expandieren und dabei eben Plasma mit sich reißen. Allerdings wird der einfachsten
Interpretation, dass diese expandierenden Schleifen bereits die magnetische Wolke
formen, von verschiedenen Autoren widersprochen.10 Stattdessen werden als möglicher Ursprung der magnetischen Wolke Rekonnexionsvorgänge vor oder hinter der
ursprünglich expandierenden Schleife vorgeschlagen. Oft werden magnetische Wolken an Sektorgrenzen11 gefunden, so dass möglicherweise Rekonnexion als Triebmechanismus in Frage kommt.12
So lange der Zusammenhang zwischen CMEn und magnetischen Wolken noch nicht
geklärt ist, ist die Frage nach der Entstehung von CMEn für das Verständnis magnetischer Wolken allerdings zweitrangig.
Letztendlich bleiben hierbei also viele Fragen offen, vielleicht mehr, als als geklärt
angesehen werden können. Auch deswegen wurde bei der Entwicklung des später
beschriebenen Modells ein einfacher, pragmatischer Ansatz gemacht.
3.4 Das interplanetare Feld um eine magnetische
Wolke
3.4.1 Feldverlauf
Im weiteren wird von einer Wolke senkrecht zur Ekliptik ausgegangen und die Betrachtungen generell auf eben die Ekliptikebene beschränkt. Die Betrachtung erfolgt
im weiteren Verlauf also rein zweidimensional. Feldlinien können sich prinzipiell nicht
schneiden. Da magnetische Wolken geschlossene magnetische Strukturen sind, kann
ein externes Feld diese nicht einfach überlagern. Prinzipiell bestehen genau zwei
Möglichkeiten, wie das äußere Feld auf eine magnetische Wolke reagieren kann. Einmal wird es diese quasi umfließen, seine Feldlinien derart verformen, dass sie sich
um die Wolke schmiegen. Dabei wird sowohl magnetischer Druck als auch Spannung
aufgebaut, so dass jedes Feld nach Einbringen einer magnetischen Wolke eine energetisch höhere und damit instabilere Konfiguration einnehmen wird. Zum Anderen
9
Eine Auflistung findet sich in [Aschwanden 2004], Abschnitt 17.1.
Man vergleiche z.B. [Gopalswamy u. a. 1998].
11
siehe Abschnitt 1.3.
12
Vergleiche [Stepanova u. Kosovichev 1993] oder auch [Gosling u. a. 2007].
10
42
Abbildung 3.4: Zwei Momentaufnahmen einer magnetohydrodynamischen Simulation des interpanetaren Magnetfeldes um eine magnetische Wolke mit der Achse
senkrecht zur Ekliptik, links ein rechtsdrehendes, rechts ein linksdrehendes Flussseil. Quelle: [Vandas u. a. 1996]
kann es unter Umständen auch zu Rekonnexionsvorgängen13 kommen. Allerdings
sind magnetische Wolken offenbar relativ stabil, so dass Rekonnexion, wenn überhaupt, nur begleitend zu der Verzerrung des äußeren Feldes auftreten wird. Zu der
Gestalt der Verzerrung gibt es verschiedene analytische Modelle. Alle gehen von einer äußerst einfachen geometrischen Wolkengestalt aus, in der Regel eben die eines
Zylinders bzw. einer Kugel (im dreidimensionalen Raum) oder einer Kreisscheibe
(im Zweidimensionalen). Erwähnt sei hier das in [Vandas u. a. 2003b] beschriebene
Modell. Dieses basiert auf der Annahme, dass eine kraftfreie Konfiguration vorliegt
und das Magnetfeld durch ein skalares Potential Φ beschrieben werden kann, so
dass die gezeigte Feldkonfiguration wegen der Grundgleichung (1.9) eine Lösung der
Laplacegleichung ∆Φ = 0 unter entsprechenden Randbedingungen darstellt. Um zu
einer analytischen Lösung zu gelangen, wurde initial ein homogenes Hintergrundfeld angenommen. Leider ist diese Annahme im interplanetaren Feld auf den für
magnetischen Wolken typischen Längenskalen nicht annähernd erfüllt. Auch andere Ansätze zur Erlangung analytischer Lösungen, so der in [Romashets u. Vandas
2001] dargestellte, basieren aus naheliegenden Gründen leider auf ähnlich speziellen
Annahmen, welche nicht annähernd durch das interplanetare Feld erfüllt sind. Die
Verallgemeinerung eines dieser Modelle erscheint nicht möglich. Diese können daher
nicht verwandt werden.
Was verbleibt, ist den Feldverlauf aus Simulationsergebnissen abzuschätzen. Hierzu
bieten sich für das sonnenahe Feld die beiden Aufsätze [Vandas u. Fischer 1995] und
[Vandas u. a. 1996], für das sonnenferne Feld u.A. der Artikel [McComas u. Gosling
1988] an. Abbildung 3.4 zeigt Momentaufnahmen verschiedener Simulationsläufe,
die [Vandas u. a. 1996] entnommen wurden. Links ist eine rechtsdrehende, rechts
eine linksdrehende Wolke in das Feld eingeschossen worden. Linksdrehend besagt
13
Siehe Abschnitt 1.2.4.
43
hier, dass die Vektoren des rotierenden Feldes, das die Wolke bildet, am Heck der
Wolke parallel, rechtsdrehend, dass sie dort antiparallel zu denen des umgebenden
Feldes liegen. Beide Bilder zeigen die Situation nach Ankunft des Wolkenzentrums
bei einer AU, die angegeben Zeiten sind die bis dahin simulierte Zeit, d.h. die Zeit,
welche die Wolke von der Sonne bis zu dieser Position benötigte. Sie sind damit einmal ein Indiz dafür, dass geschlossene magnetische Strukturen durchaus über weite
Zeitskalen stabil sind und das äußere Feld sich tatsächlich im Wesentlichen um die
Wolke herumlegt. Den deswegen verzerrten Feldlinienteilen könnte man in erster Näherung ellipsenbogenartige Verläufe bescheinigen, auch wenn dies offensichtlich nicht
überall, so z.B. auf der jeweils sonnenzugewandten Seite beider Wolken der Fall ist.
Auch ist die Feldstruktur um die Wolke herum höchst asymmetrisch. Während die
Feldlinien auf der sonnenabgewandten Seite, also “vorderhalb” bezüglich der Wolkenbewegung stark gezerrt werden, ist dies bei den Feldlinien der sonnenzugewandten
Seite hinter der magnetischen Wolke kaum der Fall.
Wie der Vergleich beider Abbildungen zeigt, übt der Drehsinn des Feldes innerhalb
der Wolke allerdings einen entscheidenden Einfluss auf die letztendliche Gestalt aus.
Die rechtsdrehende Wolke führt zu einer bei weitem asymmetrischeren Feldstruktur
als die linksdrehende. Die Bilder liefern anschauliche Hinweise, das die Ursache in einer Art “Mitnahmeeffekt” liegen könnte. Bei beiden Wolken ist das umgebende Feld
auf je einer Seite parallel und auf der jeweils gegenüberliegenden Seite antiparallel
zum angrenzenden wolkeninternen Feld orientiert. Es scheint als würde das innere
Feld das parallel verlaufende äußere mit sich ziehen. Extrem scheint dieser Effekt
im rechten Bild hervorzutreten, in dem einige Feldlinien Schlaufen vorderhalb der
Wolke bilden, welche eigentlich auf Grund der dadurch hervorgerufenen magnetischen Spannung zunächst nicht zu vermuten wären. Letztendlich ist hier vor allem
die Konsequenz, nämlich die Abhängigkeit der Feldstruktur von der Chiralität der
Wolke, entscheidend.
In beiden Fällen erfolgt jedoch eine mehr oder weniger stark ausgeprägte Kompression der Feldlinien vor der Wolke. Verantwortlich hierfür scheint die Bewegung der
Wolke zu sein. Diese erfolgt zunächst radial, und so muss die Wolke auf Feldlinien
treffen, die ihre Trajektorie schneiden. Nun könnte diese Feldlinie durch Rekonnexionsvorgänge durchtrennt werden, wozu wie in Abschnitt 1.2.4 allerdings nur
antiparallel verlaufende Feldlinien in Frage kommen. In der rechten Abbildung ist
dieses Kriterium an der Wolkenfront erfüllt, und tatsächlich scheinen hier die Feldlinien weniger dicht als in der linken Abbildung zu verlaufen. Auch gibt es Hinweise
auf Rekonnexionsvorgänge beim Durchgang magnetischer Wolken durch das interplanetare Feld, man vergleiche z.B. [Zhong u. a. 2005]. Im Fall wie er in der linken
Abbildung dargestellt wird, ist Rekonnexion allerdings nur hinter der Wolke zu erwarten. Es verbleibt hier die Möglichkeit, dass die Feldlinien vor der Wolke hergeschoben werden. Dies wird zu einer Kompression des Feldes und somit zu einem
Bereich erhöhter Feldstärke vor der Wolke führen. In dem Diagramm 3.1 ist tatsächlich im Bereich vor dem den Beginn der Wolke signalisierenden steilen Anstieg der
Feldstärke bereits eine Erhöhung der Feldstärke festzustellen. Dieser Effekt wird aus
44
naheliegenden Gründen um so stärker hervortreten, als Feldlinien die Bahn der Wolke kreuzen. Dies ist im radialen Nahfeld der Sonne kaum der Fall. Mit zunehmenden
Abstand von der Sonne nimmt die Häufigkeit der Schnitte wegen der Spiralstruktur
des interplanetaren Feldes allerdings beständig zu. Im Fernfeld verlaufen die Feldlinien schließlich nahezu senkrecht zur radialen Achse, so dass hier die Kompression und
damit der magnetische Druck bei einer rein radialen Bewegung beliebig große Werte
erreichen dürfte. Dies ist ausgeschlossen und wird im Abschnitt 3.4.2 genauer behandelt. Auch ist ersichtlich, dass auch nach dem Bereich in welchem das Feld rotiert
und mithin das eigentliche Flusseil liegen dürfte mehrere Plasmaparameter weiterhin gestört sind. Driftgeschwindigkeit und Magnetfeldstärke beispielsweise nehmen
weiter ab. Dies zeigt, dass der Bereich “hinter” der eigentlichen magnetischen Wolke
noch relativ lange durch diese beeinflusst wird.
3.4.2 Begleitende Phänomene
Eine unmittelbare Folge des interplanetaren Feldes in Kombination mit der Wolkenbewegung ist der Druck, der sich vor der Wolke aufbaut. Zum Abbau beitragen kann
im Falle der linksdrehenden Wolke Rekonnexion, und in [McComas u. Gosling 1988]
wird genau dies angenommen. Allerdings versagt dieser Erklärungsversuch spätestens bei rechtsdrehenden Wolken, so dass der Druck die Wolke mehr und mehr abdrängen muss.14 In [Vandas u. Fischer 1995] trat eine derartige Drift in Simulationen
für Wolken bis zu 1,6 AU Entfernung von der Sonne auf. Es steht zu erwarten, dass
die Drift im Fernfeld noch sehr viel ausgeprägter sein muss. Ohne Rekonnexion, also
bei rechtsdrehenden Wolken, kann der Aufbau unendlich viel magnetischen Drucks
eigentlich nur verhindert werden, indem sich die Wolke schließlich parallel zu den
Feldlinien bewegt, ihre Trajektorie damit in den Arm der solaren Spirale übergeht.
Es muss jedoch ausdrücklich darauf hingewießen werden, dass die genaue Gestalt
der Drift aus den hier betrachteten Simulationen nicht erschlossen werden konnte
und die Bewegung entlang eines Spiralarmes daher lediglich eine mögliche Bewegung darstellt. Auch die Anisotropie in der Expansion magnetischer Wolken wird
sich auf den Druck vor der Wolke zurückführen lassen.15 Die Wolke selbst besitzt
im Innern wegen der hohen Feldstärke einen relativ hohen magnetischen Druck. Das
umgebende Magnetfeld setzt diesem vor der Wolke wegen seiner Kompression am
meisten Widerstand entgegen. Es erscheint daher folgerichtig, dass die Wolke zum
Ausgleich des Druckes expandiert, und zwar weniger in Bewegungsrichtung als in
den übrigen. Bei besonders schnell eilenden Wolken kann das sich das Magnetfeld
vorderhalb so stark stauen, dass sich ein unstetiger Übergang zum ungestörten Feld
ergibt: Derartige Wolken treiben Shocks. Die Zahl der Wolken, welche mit Shocks
assoziiert sind, ist erstaunlich hoch. [Burlaga 1995] gibt ∼ 33 % aller Wolken mit
einem vorauseilenden Shock an, in neueren Studien werden teils deutlich höhere An14
15
Vergleiche [Foullon u. a. 2007].
Vergleiche [Riley u. Crooker 2004].
45
teile angegeben, so in [Jian u. a. 2006] ∼ 67 % aller dort untersuchten Ereignisse16 ,
[Bothmer u. Schwenn 1997] kommen gar auf einen Anteil von ∼ 85 % von von Shocks
begleiteter Wolken. Auf Grund der Entstehung von Shocks kann erwartet werden,
dass Wolken mit Shocks eben schnelle Wolken sind.17 Um ein mit der in Abschnitt
3.2.2 getroffenen Aussage, die mittlere Wolkengeschwindigkeit sei annähernd die des
Sonnenwindes, verträgliches Bild zu erhalten, müsste man daher von einem Anteil
von weniger als der Hälfte mit Shocks assoziierter Wolken ausgehen. Es gibt Vermutungen, dass die Häufigkeit, mit der eine magnetische Wolke einen Shock treibt,
von der Sonnenaktivität abhängt und also mit dem Sonnenzyklus variiert.
16
In dieser Studie wurden allerdings nicht ausschließlich magnetische Wolken, sondern alle Arten
von ICMEn untersucht.
17
Dies steht in Übereinstimmung mit der Feststellung in [Bothmer u. Schwenn 1997], dass Wolken
mit Geschwindigkeiten über der des Sonnenwindes mit Shocks assoziiert werden können.
46
4 Modell
4.1 Vorüberlegungen
Die Eigenschaften einer magnetischen Wolke führen dazu, dass die Feldlinien des
solaren Feldes sich um die Wolke legen, ohne sie zu durchdringen. Das ursprüngliche
archimdedische Spiralfeld der Sonne wird dabei im Bereich um die Wolke herum
verzerrt. Diese Zerrung ist bereits der einzige direkte Effekt, welcher hier Berücksichtigung erfährt. Durch das Verzerren des Spiralfeldes werden einzelne Feldlinien
gestreckt und in gewissen Bereichen komprimiert, was einer Betragsänderung der
magnetischen Induktion entspricht. Teilchen folgen nach wie vor dem Verlauf dieser Linien. So ergeben sich indirekt verschiedene Konsequenzen für das Roelofsche
Transportmodell:
1. Die Streckung führt dazu, dass einzelne Teilchen durch ein betroffenes Gebiet
einen längeren Weg als im unbetroffenen Falle zurückzulegen haben. Nach
wie vor treten keine Prozesse, welche deren Geschwindigkeitsbetrag ändern
könnten, auf, so dass die Laufzeit dieser Teilchen durch das betroffene Gebiet
effektiv steigt.
2. Der Betrag der magnetischen Induktion beeinflusst den Wert der Fokussierungslänge mit.
3. Die magnetische Induktion bzw. deren Betrag wirkt sich auf verschiedene weitere Faktoren, so z.B. den Flussröhrenquerschnitt, aus.
4. Es steht zu erwarten, dass sich eine Kompression der Feldlinien auf den Transport zwischen benachtbarten Feldlinien auswirkt.
Gemäß Abschnitt 2.2.4 wirkt sich eine Änderung der Mangetfeldstärke auf zwei entgegengerichtete Arten auf die Querdiffusion aus, die sich im Wesentlichen in ihrer
Wirkung neutralisieren. Hier wird davon ausgegangen, dass sich der Quertransport
verhält, als läge eine ungestörte Situation vor. Daher wird dieses Modell lediglich
die zur Führungsfeldlinie parallelen Prozesse modifizieren. Zu deren Beschreibung
ist die Kenntnis des magnetischen Feldes notwendig. Eine direkte Berechnung aus
den bestimmenden Gleichungen (siehe Abschnitt 1.2.1) stellt sich hierbei als sehr
schwierig heraus, so dass hier eine andere Technik wünschenswert erscheint. Auch
aus Gründen der Anschaulichkeit wird hier daher ein geometrischer Ansatz zur Ermittlung des Feldlinienverlaufes gewählt. Aus diesem ist die Wegstreckenänderung
47
und unter entsprechenden Annahmen die Änderung der Fokussierung ermittelbar.
Weitere Parameter, so der Flussröhrenquerschnitt, sind unmittelbar aus dem Verlauf der Fokussierung berechenbar. Zu deren Ermittlung sei auf die Beschreibung
der Transportprozesse (Abschnitt 2) verwiesen.
Hier wird sich auf rechtsdrehende Wolken1 ohne Shocks und senkrecht zur Ekliptik
beschränkt. Die Frage nach der genauen Struktur der Wolke wie auch der Verbindung
zur Sonne wird hier dadurch umgangen, dass lediglich ein kreisförmiger Querschnitt
in der Ekliptik sowie die Unmöglichkeit des Eindringens von äußeren Feldlinien in
diese Kreisscheibe vorausgesetzt wird.
4.2 Überblick
Abbildung 4.1: Darstellung der wesentlichen Schritte auf dem Weg zur gezerrten
Linie. pZ ist der Mittelpunkt des Zerrkreises für die Feldlinie (blau).
Der hier verwandte Ansatz zielt darauf ab, zunächst die Wegstreckenverlängerung
1
Siehe Abschnitt 3.4.1.
48
zu modellieren und im Anschluss daran aus der Verlängerung einer Feldlinie Rückschlüsse auf die Fokussierung entlang ebendieser zu ziehen. Wie in Kapitel 1.2.3
beschrieben ergibt sich der Verlauf der Feldlinien aus der gleichzeitigen Minimierung von magnetischem Druck und magnetischer Spannung. Hier wird nicht der
Versuch unternommen, dieses Prinzip auf direktem Wege zur Berechnung des deformierten Magnetfeldes auszunutzen.2 Stattdessen werden vereinfachende Annahmen
getroffen. Diese müssen die in Abschnitt 3 beschriebenen Merkmale des verzerrten
Feldes berücksichtigen.
Dem Umstand, dass nur ein begrenztes Gebiet um die Wolke herum von dieser beeinflusst wird, wird Rechnung getragen, indem, vom unverzerrten Feld ausgegangen,
um die Wolke ein Kreis KMax gezogen wird und von jeder Feldlinie überhaupt nur
der Teil, welcher sich innerhalb dieses Einflusskreises befindet, verändert wird. Es
findet sich diese Idee von [Romashets u. a. 2008] beeinflusst und Genaueres hierzu
im Abschnitt 4.3.3.1.
Der verzerrte Teil einer Feldlinie wird im Abschnitt 3 als annähernd ellipsenbogenartig erkannt. Da hier der genaue Verlauf weniger von Interesse ist, wird dieser
verzerrte Teil als Kreisbogen angenommen. Dies hält auch das Modell einfach.
Für jede Feldlinie θ wird ermittelt, ob sie den Kreis KM ax schneidet. Falls dies der
Fall ist, werden die Schnittpunkte ermittelt. Dies treten, mit Ausnahme des Falles, dass die Linie den Kreis lediglich tangiert, jeweils paarig als ein Ein- und ein
Austrittspunkt sk,0 und sk,1 auf(vgl. Abbildung 4.1, I). Deren Lage bestimmt die
Position und den Radius des eigentlichen Zerrkreises KZ , an welchem die Zerrung
erfolgt (Abbildung 4.1, II). Dieser Kreis wird so bestimmt, dass der Spiralarm θ
ihn jedenfalls schneidet. Wiederum werden die Schnittpunkte s0 sowie s1 des Spiralarmes mit dem Kreis Kθ bestimmt. Aus dem Winkel s0 − pZ − s1 und der Länge
des zwischen beiden Punkten s0 und s1 verlaufenden Armstückes kann nun die neue
Länge der Feldlinie errechnet werden (Abbildung 4.1, IV).
Das genaue Vorgehen ist in den folgenden Abschnitten beschrieben.
Die durch die Bewegung der Wolke entstehende höhere Kompression der Linien
vorderhalb muss berücksichtigt werden. Dazu wird der Mittelpunkt des Maximalkreises nicht mit dem der Wolke gleichgesetzt, sondern abhängig von der radialen
Geschwindigkeit hinterhalb in Richtung der Sonne desselben platziert, so dass sich
die Wolke im vorderen Teil des beeinflussten Gebietes befindet. Auch werden die
Zerrkreise nicht symmetrisch um die Wolke gelegt, sondern mit zunehmendem Radius ebenfalls nach hinten verlagert. Details dazu erläutern die Abschnitte 4.3.2.4
sowie 4.3.3.2.
Weiterhin ist die Tatsache zu berücksichtigen, dass im nahezu radial verlaufenden
Innenfeld die Feldlinien symmetrisch um die Wolke herumgeführt werden, während
im Außenfeld, bedingt durch die radiale Bewegung der Wolke, nahezu alle Feldlinien vorderhalb vorbeilaufen und in der Zwischenzone ein stetiger Übergang von
vollständig symmetrischer zu asymmetrischer Linienführung erfolgt. Dem wird mit
2
Analytische Lösungen sind für Spezialfälle gefunden worden, siehe Abschnitt 3.4.1. Aus den in
jenem Abschnitt erläuterten Gründen sind diese jedoch hier ungeeignet.
49
der Einführung eines asymmetrischen Faktors a genüge getan, welcher Werte von
0 (völlige Symmetrie) bis 1 (völlige Asymmetrie) annehmen kann. Abhängig vom
Wert dieses Faktors wird ein Bezugspunkt (φk , rk ) festgelegt, welcher zwischen den
Mittelpunkten der Wolke und dem des Maximalkreises KMax zu liegen kommt. Feldlinien, welche oberhalb dieses Punktes verlaufen, werden oberhalb, Feldlinien welche
unterhalb dieses Punktes verlaufen, unterhalb der Wolke vorbeigeführt. 3 Die Details
können im Abschnitt 4.3.2.2 gelesen werden.
Die Bewegung der Wolke selbst kann wie in Abschnitt 3 beschrieben nicht radial
erfolgen. Ebendort wird auch erläutert, dass Simulationen für einen kleinen Abstand von der Sonne jedoch keine wesentlichen Abweichungen von einer radialen Bewegungsrichtung nahelegen. Die hieraus resultierende Behandlung im Modell zeigt
Abschnitt 4.3.1.
4.3 Die Änderung der Feldgeometrie
4.3.1 Die magnetische Wolke
Wie bereits früher (Abschnitt 3) beschrieben, wird eine magnetische Wolke bei Abwesenheit eines äußeren oder in Gegenwart eines Radialfeldes sich radial von ihrem
Ursprung, der Sonne wegbewegen und dabei expandieren. Im Spiralfeld ist diese
radiale Bewegung so nur im Nahfeld der Sonne möglich, da die Feldlinien im Außenbereich in zunehmendem Maße quer zur Bewegungsrichtung liegen und so von
der Wolke komprimiert werden. Der dabei entstehende magnetische Druck wird die
Wolke mehr und mehr in ihrer radialen Bewegung hemmen, so dass die dadurch
freiwerdende kinetische Energie zu einer steigenden azimutalen Geschwindigkeitskomponente führt: Die Wolke bewegt sich entlang eines Spiralarmes. Wie in Abschnitt 3.4.1 dargestellt, muss in einer hinreichend großen Entfernung die Bewegung
asymptotisch in eine zu den Feldlinien rein parallele Bewegung übergehen, um den
Aufbau unendlich viel magnetischen Drucks vor ihr zu entgehen. Es ist daher zweckmäßig, die Trajektorie der Wolke als parallel zu den interplanetaren Feldlinien und
also als Arm der entsprechenden archimedischen Spirale anzunehmen:
(φM C , rM C ) = t (ωM C , vM C ) + (φM C,0 , rM C,0 )
(4.1)
Hierbei ist (φM C , rM C ) die aktuelle Position der Wolke. In der Regel wird (ωM C , vM C ) 6=
(ωSW , vSW ) gelten. Durch die Forderung ωM C = vM C βSW 4 kann jedoch ohne das
mögliche Geschwindigkeitsspektrum der Wolke zu beschneiden sichergestellt werden,
dass die Trajektorie der Wolke einer Feldlinie folgt.
Für den Querschnitt der Wolke wird eine Kreisscheibe angesetzt. Dies legt wie bereits in [Kallenrode 2002] geschehen für deren Radius den Ansatz
3
Wie “ober-” bzw. “unterhalb” in diesem Zusammenhang zu verstehen sind findet sich in Abschnitt
A.2.3
4
Siehe Abschnitt A.2.3
50
Abbildung 4.2: Darstellung wichtiger Parameter zum Umgang mit der Asymmetrie.
Aus Gründen der Übersichtlichkeit ist die Tangente am Punkt pk und nicht wie eigl.
richtig am Wolkenmittelpunkt angetragen.
ρM C = δrM C ,
δ ∈ ]0,1[ konstant
(4.2)
nahe. Dieser ist äquivalent zu der bereits früher aufgestellten Beziehung (3.1), wenn
man vexp = δvM C und den Parameter δ = ρr00 zu einem festen Zeitpunkt setzt.
Es verbleibt hier die in Abschnitt 3 beschriebene Asymmetrie in der Expansion
unberücksichtigt.
4.3.2 Asymmetrie
Zum Umgang mit der von Situation zu Situation verschiedenen Asymmetrie sind
einige Überlegungen anzustellen, deren Zweck sich möglicherweise nicht unmittelbar
erschließt. Dies wird jedoch an geeigneter Stelle eintreten.
4.3.2.1 Asymmetrischer Faktor
Die Feldlinienführung hängt entscheidend davon ab, ob sich die Wolke im nahezu
radialen Nahfeld, im Fernfeld, wo die Feldlinien annähernd konzentrische Kreise um
51
den Sonnenmittelpunkt herum beschreiben, oder im Übergangsbereich befindet. Da
zu jedem Raumpunkt genau eine Feldlinie existiert, die durch diesen führt, bietet sich
als Maß zur Entscheidung hierüber der Tangentialwinkel ϑ (t) der Feldlinie durch den
Wolkenmittelpunkt an.5 Dieser gibt den Winkel zwischen betreffender Tangente und
der Achse φ = 0 an. Für Kommendes ist es jedoch dienlich, diesen Winkel bezüglich
der Achse Wolken- Sonnenmittelpunkt und damit unabhängig von der Wolkenposition und weiters statt des baren Winkels dessen Sinus als auf das Einheitsintervall
normierte Kenngröße a heranzuziehen. Betreffendes a ist über die Formel (4.3) sowie
(4.4) mit Kenntnis des Tangentialwinkels ϑ (t) einfach zu ermitteln:
α = ϑ (t) + φMC
a = sin α
(4.3)
(4.4)
a = 0 zeigt dabei an, dass die Wolke sich noch dicht an der Sonne im Gebiet, in
welchem das Feld als radialförmig angenommen werden kann befindet, a = 1 erklärt
die Wolke als im Außenfeld befindlich.
4.3.2.2 Bezugspunkt pk
Zur Entscheidung, wie die Feldlinien in der konkreten Situation um die Wolke zu
führen sind, wird ein Bezugspunkt pk = (φk , rk ) verwandt. Dieser wird gemäß Gl.
(4.5) so platziert, dass er in jedem Fall innerhalb der Wolke zu liegen kommt. Dabei
stimmt seine Position im Nahfeld mit dem Wolkenmittelpunkt überein, im Außenfeld
kommt er auf dem der Sonne zugewandten Wolkenrand zu liegen.
φk = φM C
rk = rM C − aρM C
(4.5)
wie bereits erwähnt, werden Feldlinien, welche oberhalb dieses Punktes vorbeilaufen,
über, Feldlinien, die unterhalb vorbeilaufen, unter der Wolke herumgeführt. pk teilt
somit das beeinflusste Feldlinienbündel in einen oben und einen unten herum geführten Teil. Um dies für eine Feldlinie effizient ermitteln zu können, wird sich die Definition eines Parameters τ als nützlich erweisen. Dazu wird die durch den Bezugspunkt
pk verlaufende Feldlinie θk bestimmt, so dass also (φk , rk ) = tk (ωSW , vSW ) + (θk , 0)
gilt. Diese schneidet KM ax in den beiden Punkten sk,0 = t0 (ωSW , vSW )+(θk , 0) sowie
sk,1 = t1 (ωSW , vSW ) + (θk , 0). τ ist nun das Verhältnis
τ =
5
|pk , sk,0 |
|sk,1 , sk,0 |
Siehe Abschnitt A.2.3.
52
(4.6)
wobei |.,.| den euklidischen Abstand zweier Punkte meint. τ gibt also grob an, in
welchem Verhältnis der Bezugspunkt den innerhalb von KM ax liegenden Teil der
Feldlinie teilt. Der Sinn dieser Definition erschließt Abschnitt 4.3.3.
4.3.2.3 Querschnitte
Die Zerrung ergibt sich aus der relativen Lage einer Feldlinie innerhalb des Linienbündels. Für das weitere Vorgehen wird es daher notwendig, ein Maß für den
relativen Abstand einer Feldlinie von der magnetischen Wolke zu entwickeln. Als
Bezugsgröße wird hierfür ein “Maximalabstand” benötigt. Es liegt nahe, hierzu den
Querschnitt des unverzerrten Feldlinienbündels entlang eines definierten Weges anzusetzen. Da deren jeweils zwei auftreten, nämlich das ober- und das unterhalb der
Wolke vorbeigeführte und ersteres im Allgemeinen bedeutend dünner als das zweite ist, macht es Sinn, zwei maximale Querschnitte Do und Du , für das obere bzw.
das untere zu bestimmen und je nach Linienverlauf das Passende zu wählen. Es ist
notwendig, den Querschnitt an einem Ort zu wählen, an welchem möglichst alle beeinflussten Linien erfasst werden.6 Da der Punkt pk als Bündelteiler fungiert, wird
von diesem ausgegangen und die Senkrechte zu der durch diesen Punkt verlaufenden
Feldlinie θk in diesem Punkt genommen. Diese schneidet KM ax einmal ober- sowie
einmal unterhalb von pk . Do bzw. Du werden nun als der Abstand des oberen bzw.
unteren Schnittpunktes so bzw. su zu pk definiert und können unter Verwendung des
Kosinussatzes einfach analytisch ermittelt werden:
∆ = rk − rM ax
s
Do = ∆ cos (π − α) + ρM ax
s
Du = ∆ cos α + ρM ax
1−
1−
∆2
(1 − cos2 (π − α))
ρ2M ax
∆2
(1 − cos2 α)
ρ2M ax
(4.7)
(4.8)
α ist wiederum der Tangentialwinkel der Feldlinie θk in pk .
4.3.2.4 Bugwelle
Die Behandlung der Feldlinienkompression vorderhalb der Wolke muss berücksichtigen, dass diese um so dichter zuammengeschoben werden, je höher die radiale
Geschwindigkeit der Wolke ist. Da mit zunehmender Feldliniendichte immer höherer magnetischer Druck einer weitergehenden Kompression entgegenwirkt, werden
die Feldlinien bei relativ kleinen Geschwindigkeiten verhältnismäßig stark komprimiert, bei steigenden Geschwindigkeiten wird die Kompression im Vergleich dazu
6
Gründe hierfür sind in den Abschnitten 4.3.3.2 sowie 4.4.2 angeführt.
53
weniger stark zunehmen. Es wird daher eine maximale Kompression angenommen,
welche bei steigenden Radialgeschwindigkeiten asymptotisch angestrebt wird. Die
Dicke des komprimierten Feldlinienbündels nimmt um so weiter ab, je höher die
Kompression derselben ist. Im Endeffekt wird daher der vor der Wolke hergeschobene Feldlinienstrang bei zunehmender Geschwindigkeit der Wolke einer minimalen
Dicke entgegenstreben. Die Dicke dieses Bündels entspricht dem minimalen Abstand
des vorderen Wolkenrandes vom Rand des beeinflussten Gebietes KM ax . Daher wird
die Dicke κ (vM C ) im vorliegenden Modell entsprechend Gl. (4.9) als exponentiell
gegen ein Minimum κM in abfallend angesetzt.
κ (vmc ) = κM ax K + e−aκ vmc (1 − K)
κM in
K =
κM ax
(4.9)
κM ax gibt dabei die Dicke des Bündels bei einer sich nicht bewegenden Wolke an. Es
gilt κM ax = 21 (ρM ax − ρM C ), da sich bei einer stehenden Wolke sinnigerweise keine
Kompression vorderhalb einstellen kann. κM in = lim κ (vSW ) gibt entsprechend
vSW →∞
die minimale Dicke dieses Bündels für große Wolkengeschwindigkeiten an. Weiter ist
es sinnvoll, κmax = kf rM C anzusetzen, da zu erwarten steht, dass der Feldbereich,
der von der Wolke gestört wird, mit der Wolkengröße skaliert. Man erhält somit
letztlich
κ (v) = κmin + e−aκ v (kf rM C − κM in )
(4.10)
Von ak hängt ab, wie schnell die maximale Kompression erreicht wird. Man kann
aκ := vln1/22 definieren und v1/2 als die Geschwindigkeit betrachten, bei der κ =
1
(κM in
2
+ κM ax ) gilt.
4.3.3 Zerrkreise
Mit den bisherigen Definitionen ist es nunmehr möglich, die Berechnung des maximalen Einflussgebietes KM ax sowie der Kreisbögen, zu welchen Teile der Feldlinien
verzerrt werden, zu berechnen.
4.3.3.1 Maximalkreis
Das maximal beeinflusste Gebiet zeichnet sich dadurch aus, dass außerhalb dieses
Bereiches das solare Feld von der Wolke nicht verändert erscheint. Offensichtlich ist
54
dieses so nicht klar zu umreißen. KM ax soll daher als die Kreisscheibe minimalen Radius, außerhalb welcher das Magnetfeld keine Beeinflussung durch die Wolke erfährt,
verstanden werden. Wie in vorangegangenen Erläuterungen bereits ausgeführt liegt
die Wolke dabei nicht zentral in dieser, sondern in deren von der Sonne entfernteren
Teil. Das Modell setzt für dessen Mittelpunkt daher (4.12) bzw. (4.13) an.
ρM ax = κM ax + ρM C = (δ + kf ) rM C
rM ax = rM C − ρM ax + κ + ρM C
φM ax = φM C
(4.11)
(4.12)
(4.13)
Zusammen mit der Wahl des Radius des Maximalkreises gemäß Gl. (4.11) ist über die
Einbeziehung von κM ax sichergestellt, dass sich die Wolke um so weiter zum vorderen
Rand dieses Gebietes schiebt je höhere Radialgeschwindigkeit sie besitzt. Diskutabel
ist wie auch im Falle der Zerrkreise die Wahl von φ für den Kreismittelpunkt. Anstelle
diesen auf die Achse Wolken- - Sonnenmittelpunkt zu legen wäre auch die Annahme
eines gewissen Versatzes möglich.
4.3.3.2 Zerrkreis einer bestimmten Feldlinie
Ist klar, dass eine Feldlinie θ den Kreis KM ax schneidet, so muss für diese Start- und
Endpunkt s0 bzw. s1 des zu verzerrenden Feldlinienabschnittes sowie dessen Länge
|s0 , s1 | bestimmt werden. Hierfür wird ein weiteres Mal ein Schnittkreis Kθ ermittelt
und die Feldlinie mit ihm geschnitten, wobei sich s0 und s1 als die Schnittpunkte
ergeben. Durch diese wird Kθ in zwei Kreisbögen geteilt, deren einer als die verzerrte
Linie angenommen wird.
Um das in Abschnitt 1.3 dargestellte Verhalten zu erhalten, wird angestrebt, dass
Feldlinien, die unverzerrt dichter am Wolkenmittelpunkt vorbeiliefen auf engeren
Kreisbögen gezerrt werden als Feldlinien, die dies weiter entfernt von diesem Punkt
täten. Allerdings führte dies im Außenfeld dazu, dass die Asymmetrie nicht berücksichtigt würde, so dass man hier statt des Wolkenmittelpunktes besser den Punkt
pk als Bezug nimmt. Dieser liegt im Außenfeld unterhalb des Wolkenmittelpunktes
nahe dem Mittelpunkt von KM ax . Als Folge davon werden nahezu alle Feldlinien,
die auf die Wolke treffen, korrekt oberhalb der Wolke vorbeigeführt. Es wird der
Mittelpunkt von Kθ entsprechend Gl. (4.17) festgelegt. Die Gestalt der Gleichung
bewirkt, dass der Zerrkreis je näher an der Sonne liegt, je dichter die unverzerrte
Feldlinie am Punkt pk vorbeiläuft.
55
th = (t1 − t0 ) τ + t0
pθ = (ωs th + θ, vs th )
|pθ (th ) , (rk , φk )|
⇒ |pθ , pk | = DDRel
D =
DRel
rθ (D) = rM C + 1 − (D − 1)2 (rM ax − rM C )
|pθ , pk |
ρθ (D) = |pθ , pk | + ρM C 1 −
= DDRel + ρM C (1 − D)
DRel
(4.14)
(4.15)
(4.16)
(4.17)
(4.18)
Sichergestellt sein muss, dass die Feldlinie den Schnittkreis schneidet, sprich es muss
wenigstens ein Punkt p auf der Feldlinie, welcher innerhalb des Schnittkreises liegt,
existieren, für den also gilt:
|p, pk | ≤ ρθ
(4.19)
Weiter gilt für den Radius ρθ des Schnittkreises ρM C ≤ ρθ ≤ ρM ax .
Angesetzt wird
ρθ = ρM C + X (DRel − ρM C ) , 0 ≤ X ≤ 1,
und
X =
lim
|pθ ,pk |→DRel
Damit ergibt sich
|pθ , pk |
(DRel − ρM C )
DRel
|pθ , pk | ρM C
= ρM C + |pθ , pk | −
DRel
|pθ , pk |
= |pθ , pk | + ρM C 1 −
DRel
Mit |pθ , pk | ≤ DRel folgt
56
X=0
(4.20)
X=1
|pθ , pk |
DRel
ρθ = ρM C +
lim
|pθ ,pk |→0
(4.21)
ρθ ≥ |pθ , pk |
(4.22)
Damit ist die ursprüngliche Forderung (4.19) erfüllt. Unter der Annahme, dass
DRel ≈ ρM ax , gilt offenbar weiter
lim
|pθ ,pk |→ρM ax
ρθ = |pθ , pk | → DRel ≈ ρM ax
lim
|pθ ,pk |→0
ρθ = ρM C
(4.23)
4.3.3.3 Verzerrung der Feldlinien
Abbildung 4.3: Prinzipiell mögliche Verläufe einer Feldlinie.
Sind für eine gegebene Feldlinie θ der entsprechende Zerrkreis Kθ berechnet und
deren Schnittpunkte s0 und s1 errechnet, so wird die Länge der Linie innerhalb
dieses Bereiches so berechnet, als liefe sie entlang des Kreises. Dies wird dadurch
57
erreicht, dass über den Abstand der beiden Schnittpunkte der Winkel ψθ des durch
sie begrenzten Kreissektors des Zerrkreises Kθ berechnet und dieser wiederum zur
Errechnung der Bogenlänge des Kreisbogens herangezogen wird.
|s0 , s1 |
2ρθ
l
ρθ ψθ,korr
=
=
|s0 , s1 |
|s0 , s1 |
ψθ = 2 arcsin
(4.24)
zθ
(4.25)
Für die Implementation ist es günstig, statt der verzerrten Länge l direkt zunächst
den Zerrfaktor zθ , also das Verhältnis aus verzerrter zu unverzerrter Strecke zu berechnen. Dies führt auf Gl. (4.25). Hierbei stellt sich das Problem, dass der Zerrkreis
durch die ihn schneidende Feldlinie in zwei Kreissektoren geteilt wird und a priori
nicht klar ist, welcher dieser beiden verwandt werden soll. Der kleinere der beiden
überstreicht den Winkel ψθ , der größere den Winkel 2π−ψθ . ψθ,korr in Gl. (4.25) muss
als der entsprechende Winkel gewählt werden. Glücklicherweise stellt dies jedoch nur
in Ausnahmefällen ein Problem dar, in der Regel kann ψθ,korr = ψθ verwandt werden.
Um festzustellen, ob ein solcher Fall vorliegt, mithin alos Φθ,korr = 2π − Φθ anzusetzen ist, betrachtet man die Lage der Feldlinie relativ zum Zerrkreismittelpunkt pk .
Soll die Feldlinie auf derselben Seite des Mittelpunktes vorbeigeführt werden, auf der
sie auch im unverzerrten Falle vorbeiliefe, so wird nämlich gerade der kleinere Kreissektor benötigt. Probleme ergeben sich im Außenfeld, wo Feldlinien, die eigentlich
unterhalb des Wolkenmittelpunktes und damit potentiell auch des Zerrkreismittelpunktes verlaufen, oberhalb der Wolke vorbeigeführt werden. Hier ist tatsächlich der
größere Kreissektor und also φθ,korr = 2π − ψθ zu wählen. Die hierbei voneinander
zu unterscheidenden Möglichkeiten des Feldlinienverlaufes zeigt Abb. 4.3. Fall (1)
verläuft unverzerrt unterhalb von pk und wird nach der Zerrung also links unterhalb,
Fall (2), da oberhalb von pk verlaufend rechts oberhalb entlang des Zerrkreises vorbeigeführt. Fall (3) passiert pk ebenfalls oberhalb, wird also ebenfalls oben herum
gezerrt. Im Gegensatz zu Fall (2) muss hier jedoch offenbar der größere Kreissektor
gewählt werden. Dies liegt daran, dass die Feldlinie unverzerrt unterhalb des Zerrkreismittelpunktes verläuft. Genau in diesem Falle, dass die Feldlinie oberhalb von
pk , jedoch unterhalb von pθ , also zwischen diesen Punkten verläuft, ist also ψθ,korr
zu 2π − ψθ , in allen sonstigen Fällen zu ψθ zu wählen.7
4.4 Fokussierung
Die Zerrung der Feldlinien ist nunmehr vollständig beschrieben. Von Interesse ist
weiterhin der Einfluss der Wolke auf die Fokussierung, welche aus bereits erläuterten Gründen von den Folgen der Anwesenheit einer Wolke schwerlich unbetroffen
7
Es sei auf Abschnitt 5.4.2 verwiesen. Dort wird die Methode, wie der Feldlinienverlauf im Programm bestimmt wird, erläutert.
58
bleiben kann. Hier wird der Versuch unternommen, durch Rückgriff auf das bisher
Geschaffene den zur Ermittlung der Fokussierung nötigen Aufwand möglichst gering
zu halten.
4.4.1 Bestimmung der Fokussierungslänge im modifizierten
Bereich
Es wird davon ausgegangen, dass die Kompression der Feldlinien bei th (Gl. (4.14))
maximal ist und von dort ab entlang einer Feldlinie stetig auf den Wert des unbeeinflussten Feldes B0 (s) sinkt. Im Zenit wird das Feld mit
BM ax = B (s (th )) = B̃0 (s (th )) + AB̃0 (s (th ))
(4.26)
, der Verlauf des Kompressionsterms entlang der Feldlinie zwischen den Durchstoßpunkten s0 , s1 als sinoidal angesetzt:
B̃ (s) (1 + A sin (c (s))) , s0 ≤ s ≤ s1
B0 (s) sonst
s − s0
c (s) =
π
s1 − s0
B (s) =
(4.27)
Die Kompression der Feldlinien wird von der Wolke aus gesehen radial abfallen, so
dass also B̃ von Feldlinie zu Feldlinie verschieden sein wird. Es bietet sich der Ansatz
B̃ (s) = C (l) B0 (s)
mit B0 (s) als dem ungestörten Feld an, wobei der genaue Verlauf hier zunächst noch
nicht festgesetzt und nur als unbestimmter Faktor C (l) mit l als der Abstand der
Feldlinie vom Wolkenrand8 angenommen wird. l ist von s unabhängig. Als Gesamtterm des Betrags des mag. Flusses ergibt sich somit
B (s, l) = B0 C (l) (1 + A sin (c (s))) , s0 ≤ s ≤ s1
(4.28)
Die Fokussierungslänge ist gemäß Gleichung (1.35) definiert, wobei in diesem Zusammenhang vielmehr ihr Inverses von Interesse ist. Dieses ergibt sich aus den obigen
Annahmen zu
8
Der genaue Weg, entlang welchem dieser gemessen wird, ist auf Grund des multiplikativen Ansatzes irrelevant.
59
∂c
0
C (l) ∂B
(1 + A sin c (s)) + B0 A cos c (s) ∂s
∂B 1
1
∂s
=−
= −
λ
∂s B
C (l) B0 (s) (1 + A sin c (s))
1
A cos c (s) ∂c
1
−
=
λ (s)
λ0 1 + A sin c (s) ∂s
(4.29)
Hier ist λ0 (s) die Fokussierungslänge des ungestörten Feldes. Für s ∈ [s0 , s1 ] wird der
Sinus im Nenner nicht negativ, folglich ist der Term im relevanten Bereich definiert.
Die Änderung der Inversen der Fokussierung gestaltet sich also durch ledigliche
Addition eines Terms relativ einfach.
Aus Gl. (4.26) ergibt sich für s =
A =
s0 +s1
2
BM ax
−1
B0
(4.30)
Es wird offenbar, dass der Ansatz überhaupt nur Sinn ergibt, wenn sich das ungestörte Feld zwischen s0 und s1 nur marginal ändert, so dass man hier von einem
1
mittleren Wert desselben von B0 ≈ B0 s0 +s
ausgeht.
2
Es sei hier erwähnt, dass der Ansatz (4.28) als relativ Rustikaler einfach zu handhaben ist, jedoch gewisse Nachteile aufweist. Nimmt man einen stetigen Übergang
des Feldes vom ungestörten in den gestörten Bereich an, so sollte
s0 + s1
s0 + s1
s0 + s1
lim Bu
, l = lim Bo
, l = B0
l→du
l→do
2
2
2
gelten. Dies erfüllt getroffener Ansatz nicht. Auch weitere Stetigkeitsbedingungen
sind verletzt. Einigen dieser Probleme könnte dadurch abgeholfen werden, dass man
in Gleichung (4.27) B̃ = B0 als konstant und stattdessen für A einen mit l variablen
Ansatz träfe:
A (l) = C (l) Ã
Dies führte jedoch zu einem gigantisch aufgedunsenen und damit schwer beherrschbaren Modell, dessen Komplexitätszuwachs vermutlich in keinem Verhältnis zum
erwarteten Mehrwert stünde.
4.4.2 Bestimmung der Kompressionsrate A
Die Frage ist noch offen, wie A in Gleichung (4.30) zu wählen ist. Unter gewissen
Annahmen lässt sich deren Wert aus bereits Bekanntem bestimmen.
Zunächst muss der Faktor C (l), also die Abhängigkeit des Feldes vom Abstand der
Wolke, nun sinnvoll angesetzt werden.
60
Abbildung 4.4: Kompression der Feldlinien.
Der Abstand ∆r(D1 , D2 ) zweier Feldlinien ist von ∆D = D2 − D1 quadratisch abhängig, wie aus den Gleichungen (4.17) und (4.18) für Abstände entlang der radialen
Achse abgeschätzt werden kann:
∆r (D1 , D2 ) = r (D2 ) + ρ (D2 ) − (r (D1 ) + ρ (D1 )) =
= ∆r D12 − D22 + 2 (D2 − D1 ) + (D2 − D1 ) (DRel ρM C )
= ∆D (∆r (2 − 2D1 − ∆D) + DRel − ρM C ) mit ∆r = rM ax − rM C
Diese Rechnung gilt so nur für oberhalb der Wolke vorbeigeführte Linien, für unterhalb vorbeigeführte ist statt der Summe r (Di ) + ρ (Di ) deren Differenz zu betrachten.9 Man findet auch hierbei eine quadratische Abhängigkeit, so dass es gerechtfertigt erscheint, für den Abfall des Betrags der magnetischen Induktion ebenfalls
einen quadratischen Term anzusetzen.
BM ax
C (l) =
−
B0
2 l
BM ax
−1 =
di
B0
2 !
l
1−
Ai + 1
di
(4.31)
Der Gesamtterm für das Feld lautet somit
9
di bzw. Di meint hier wie im Folgenden i ∈ {o, u}.
61
B (s, l) = B0
1+
2 ! !
l
1−
Ai (1 + Ai sin c (s))
di
Von der Verzerrung der Feldlinien durch die Wolke sind laut Annahme nur Feldlinien
innerhalb eines gewissen Bereiches betroffen. Wie gesagt lassen sich alle in den modifizierten Bereich eindringenden Feldlinien genau einem von zwei Bündeln zuordnen,
deren eines bei Anwesenheit der Wolke oberhalb, und deren zweites unterhalb dieser Wolke vorbeigeführt wird. Wie sich herausstellt, wird der Weg letztendlich zu
zwei verschiedenen Konstanten Ao und Au , nämlich je eine für das obere und das
untere Bündel , führen.10 Es ist nun möglich, durch je eines dieser Bündel einen
Weg so zu legen, dass dieser alle Feldlinien des Bündels senkrecht schneidet, und
zwar sowohl im unverzerrten wie auch im verzerrten Falle. Konzentriert man sich
hierbei auf eines der beiden Bündel und wählt einen derartigen Weg w
~ 1 für den
unverzerrten
und
~ 2 für den verzerrten
Fall, so müssen die Wegintegrale
R
R einen WegRw
R
~ × d~l =
~ × d~l =
B
B
dl
und
B
B
dl
für je beliebig gewählte w
~ 1 und
w
~1
w1
w
~2
w2
11
w
~ 2 übereinstimmen. Lokal liegen alle Feldlinien parallel zueinander, so dass hier
folgende Annahme gemacht wird: Günstig gewählte Teile der Geraden durch den
Punkt (φk , rk ), welche senkrecht auf der durch diesen verlaufenden Feldlinie liegen,
stellen solche Wege dar. Man erkennt aus Abb. 4.2 für den unverzerrten Fall, dass
für das untere bzw. obere Bündel die Strecken w
~ 1,o = Du bzw. w
~ 1,u = Do solche
Teilstrecken sind. Im verzerrten Falle ist die Wolke, die ja von den Feldlinien nicht
durchdrungen werden kann, von diesen beiden Strecken wegzunehmen. Es ergeben
~ 2,u = du = Du − d¯u für das untere
sich die in Abb. 4.4 dargestellten Teilstücke w
¯
und w
~ 2,o = do = Do − do für das obere Bündel. d¯o und d¯u sind hierbei einfach entsprechend Do / Du (siehe Abschnitt 4.3.2.3) zu berechnen, so dass sich letztendlich
ergibt:
∆ = rk − rM C
s
∆2
(1 − cos2 α)
ρ2M ax
s
∆2
= ∆ cos (π − α) + ρM ax 1 − 2 (1 − cos2 (π − α))
ρM ax
= Di − d¯i
d¯o = ∆ cos α + ρM ax
d¯u
di
10
1−
(4.32)
(4.33)
(4.34)
Dass die Kompression des Feldes hinterhalb der Wolke eine andere als vorderhalb ist, steht auch
offensichtlich zu erwarten.
11
Da die Feldlinien. also B senkrecht zu w1 bzw. w2 stehen, vereinfacht sich das Kreuzprodukt
zum Produkt der jeweiligen Beträge
62
Für das ungestörte Feld wird davon ausgegangen,
dass sich dieses entlang des Weges
R
Di nur wenig ändert und das Integral Di B dl = Di B0 liefert. Da dieses mit dem
Integral entlang des gestörten Feldes übereinstimmen muss, muss gelten:
Z
0
=
Di B0 −
B dl =
di
!
2 !
l
B0 (1 + Ai )
1−
= Di B0 −
Ai + 1 dl
di
di
di
l3
= Di B0 − B0 (1 + Ai ) l − 2 Ai + l
3di
0
1
= Di − (1 + Ai )
1−
Ai + 1 di
3
2 2 5
Di
−1
=0
⇐⇒
A + A−
3 i 3
di
Z
Dies führt auf zwei mögliche Werte von Ai , deren einer jedoch negativ und somit
widersprüchlich zur Definition von Ai ist. Es verbleibt
Ai
1
=
4
r
!
Di
24
+1−5
di
(4.35)
63
5 Implementierung
5.1 Überblick
Es liegt bereits eine funktionsfähige Implementation des baren Transportmodells
für die Ekliptik in Form des Prgrammes GREF vor. Dieses kann entsprechend den
in Abschnitt 4 dargelegten Vorgehensweisen ergänzt werden. Es sollte versucht werden, den vorhandenen Code so weit als möglich beizubehalten, um den Eintrag von
Fehlern in bestehenden Code zu minimieren. In dem im folgenden Abschnitt 6 vorgestellten Prototypen wird dieser daher weitestmöglich in ein zusätzliches Modul in der
Datei magneticcloud.F95 ausgelagert. Eine minimale Veränderung des ursprünglichen Codes zur Integration dieses Moduls ist dabei aber generell unvermeidlich.
5.2 GREF
GREF benutzt die in Abschnitt 2.3.2 erklärten Verfahren. Dabei ist es die Szenariengestaltung betreffend relativ flexibel, erlaubt verschiedene Injektionsfunktionen, unterschiedliche Feldkonfiguration mit und ohne Fluktuationen und dergleichen mehr.
Das Programm ist darauf ausgelegt, Punktmessungen zu simulieren. Hierzu können
auf mehrere Flussröhren Beobachter gesetzt werden. Das Programm liefert unter
Anderem für jeden der so gewählten Punkte die zeitliche Entwicklung der Intensität
sowie die Anisotropie (Siehe Abschnitt 2.4) des Teilchenstromes in der betreffenden
Röhre. Die Intensität wird dabei über
I=
f
A
mit A als dem Flussröhrenquerschnitt sowie f als der Phasenraumdichte bestimmt.
Die Anisotropie wird im Programm, da eine diskrete Pitchwinkelverteilung vorliegt,
über eine einfache Mittelwertbildung entsprechend
P
µi Z i
i
P
A0 =
Zi
i
eben dieser Winkel ermittelt (Vergleiche Formel (2.27)). Zi = I(µ) stellt hierbei die
Zahl der Teilchen mit dem Winkel µi dar.
64
Intensität und Anisotropie sind direkt mit entsprechenden Messdaten z.B. der Heliossatteliten vergleichbar. Die hier zu Grunde gelegte Version stimmt nahezu mit
der in [Lampa 2006] entwickelten überein. Einziger wesentlicher Unterschied ist das
verwandte Raumgitter. Das modifizierte Gitter wird im Abschnitt 2.3.2 beschrieben.
5.3 Veränderungen innerhalb des ursprünglichen
Codes
Das ursprüngliche Programm repräsentiert, da das ungestörte Feld sich entlang allen Feldlinien identisch verhält, die meisten Gittereigenschaften eindimensional. Die
Entwicklung beispielsweise der Knotenabstände entlang einer Feldlinie wird im eindimensionalen Feld ds abgelegt. Da diese Symmetrie bezüglich der Feldlinien nicht
mehr gegeben ist, die Knotenabstände beispielsweise von Feldlinie zu Feldlinie variieren können, müssen zunächst alle betreffenden eindimensionalen Felder in wirkliche
zweidimensionale Felder umgewandelt werden. Betroffen davon sind die Felder s
und ds. In den Feldern eta1, eta2 sowie tdsmu sind verschiedene Vorfaktoren der
Gleichungen für den s-Transport zusammengefasst, die unter Anderem von einem
der beiden vorangehenden Felder abhängen. Auch sie sind daher zu zweidimensionalen Feldern zu erweitern. Die Fokussierungslänge λ speichert das Programm in
1
der Form 2λ
im Feld r2l. Dieses Feld muss ebenfalls um eine Dimension erweitert
werden. Mit der Fokussierungslänge ändert sich gemäß Gleichung (1.39) auch der
Querschnitt der Flussröhren. Somit muss auch das Feld fcorr, in welchem dieser
je Gitterpunkt abgelegt ist, angepasst werden. Im Gegensatz zum s-Gitter werden
die senkrechten Abstände zwischen den einzelnen Feldlinien als unverändert angenommen, so dass die Vorfaktoren des Quertransportes, soweit von s abhängig, nach
wie vor mit den ursprünglichen, unverzerrten s-Werten ermittelt werden. Sie bleiben
gegenüber dem Originalprogramm also unverändert.
Die Vorgehensweise stellt sich dann wie folgt dar: Zunächst wird das unverzerrte
Feld berechnet und seine Geometrie in s sowie ds abgelegt. Danach werden die
Fokussierungslängen entlang einer Feldlinie für den unverzerrten Fall berechnet und
in r2l abgelegt.
Für jeden Zeitschritt wird das Feld gezerrt, die gezerrte Geometrie in s_2d sowie
ds_2d abgelegt und parallel dazu die Terme der Fokussierungslängen in r2l und
die Flussröhrenquerschnitte angepasst. Hiernach werden die übrigen Parameter wie
eta1 berechnet. Zur Berechnung der den Quertransport betreffenden Terme werden
die Felder s sowie ds herangezogen, die noch die ungezerrte Geometrie enthalten.
Am Ende jedes Rechenzyklus muss in der Routine gcalc jeweils die Position der
Wolke entsprechend ihrer Bewegung angepasst werden, um die Bewegung der Wolke
zu realisieren.
In dem in Abschnitt 6 betrachteten Prototypen wird die Änderung des Flussröhrenquerschnittes aus zeitlichen Gründen vernachlässigt. Dieser dient lediglich als Wich-
65
tungsfaktor bei der Ausgabe wie in Abschnitt 5.2 beschrieben und beeinflusst die
eigentliche numerische Lösung nicht. Eine Implementierung der Änderung der Flussröhrenquerschnitte liegt vor, zeigt in ihrem Verhalten und den letztendlichen Resultaten jedoch keine wesentlichen Unterschiede zu der diese nicht berücksichtigenden
Version. Die Modifikation des Feldes sowie Anpassung aller hiervon betroffenen Variablen erfolgt in der in perpdiff.f95 implementierten Methode mod_geometry.
Diese Methode greift hierbei im Wesentlichen auf die Methoden distort und setfcorr
zurück. Sowohl distort als auch update_mc sind in dem neu hinzugekommenen Modul magneticcloud.F95 implementiert. Da distort tendenziell versagt, wenn die
Wolke die innere Domänengrenze schneidet, wird in mod_geometry auf diesen Fall
geprüft und eine Zerrung nur ausgeführt, falls die Wolke die innere Grenze nicht
mehr berührt.
Darüber hinaus erfuhren lediglich die Methoden setfcorr sowie zbrent geringfügige
Änderungen. Die Änderungen in setfcorr sind ebenfalls allein dem Umstand geschuldet, dass die dort verwandten Felder s_2d und ds_2d nunmehr eine Dimension
mehr besitzen und also unspektakulär.
zbrent dient der numerischen Berechnung der Umkehrfunktion r(s) von s(r) (Vergleiche Abschnitt 1.3) mit dem Brentverfahren. Da zur Berechnung der Zerrung
mehrere verschiedene Nullstellenbestimmungen durchzuführen sind, wurde das eigentliche Brentverfahren in eine gesonderte Methode findRoot ausgelagert und kann
nunmehr mit beliebigen zu lösenden Funktionen aufgerufen werden. zbrent wurde
auf die Nutzung der ausgelagerten Funktion umgestellt.
Im im Zuge dieser Arbeit erstellten Implementationsentwurf wurde die Methode
readinput dahingehend angepasst, dass die Modellparameter aus der zentralen Konfigurationsdatei eingelesen werden. Sie werden in der letzten Zeile in der Reihenfolge
ρM C,0 , v_f, k_quot, k_vfac, k_f, exp_fac sowie mc_dyn und offset_t eingelesen.
mc_dyn gibt dabei an, ob die Simulation dynamisch ( = 1) oder statisch (6= 1) erfolgen soll. offset_t gibt die zeitliche Verzögerung an, mit der die Wolke in die
Domäne gesetzt werden soll. Eine derartige zeitliche Verzögerung ist sinnvoll, da
durch verzögertes Einbringen der Wolke der Teilchenstrom sich von der Domänengrenze entfernen kann. So wird letztlich die die Einbringung der Wolke hinter dem
eigentlichen Teilchenstrom ermöglicht.
5.4 magneticcloud.F95
Die wesentliche Funktion ist distort(s_start, s_l, r2l, n). Ihr ist ein Feld s_l
mit den Intervalllängen ∆s entlang einer Feldlinie sowie der dazugehörigen Fokussierungslängen r2l, jedes Feld mit jeweils n Einträgen, zu übergeben. s_start gibt
dabei den Wert der Bogenlänge der betrachteten Feldlinie am Beginn des ersten
Intervalles s_l(1) an.
Die Einträge in s_l werden entsprechend dem Modell (Siehe Abschnitt 4.3.3.3) ge-
66
dehnt und die Fokussierungslängen entsprechend angepasst. Dabei werden die Werte
in den Feldern s_l und r2l überschrieben, das Ergebnis in diesen Feldern zurückgegeben.
Für stabilen s-Transport sind die Stabilitätskriterien von Cournat-Friedrichs-Levy (2.21)
sowie von Lax-Richtmyer (2.20) zu berücksichtigen. Das Einbringen einer Wolke
dehnt das Gitter, somit gilt für je zwei Gitterpunkte mit einem Abstand ∆si ohne
Zerrung die Ungleichung ∆si ≤ ∆si,z . Erfüllt das unverzerrte Gitter beide Kriterien, so erkennt man unmittelbar aus dieser Ungleichung, dass die Bedingungen von
Lax-Richtmyer und CourantßFriedrichs-Levy auch nach dem Verzerren erfüllt sein
müssen. Implementation einer Wolke kann einen zuvor stabilen s-Transport also
nicht destabilisieren.
Stabile Pitchwinkeldiffusion erfordert die Erfüllung der beiden Kriterien (2.22). Die
erste der beiden Bedingungen gibt einen minimalen Wert der Fokussierungslänge λ
vor. Sollte sie verletzt werden, kann λ auf den sich aus der Ungleichung ergebenden minimalen Wert gesetzt werden und das Lösungsverfahren so stabil gehalten
werden. Um die zweite der beiden Bedingungen zu erfüllen, müssen die in [Lampa 2006, Abschnitt 4.2, “Der µ-Transport”] gegebenen Korrekturfaktoren akh nach
jeder Änderung der Fokussierungslänge oder des s-Gitters angepasst werden.
Das Modul muss vor Benutzung durch den Aufruf mc_init initialisiert werden. Die
Position der Wolke wird in r_mc und phi_mc, ihr Radius in rho_mc abgelegt. Ihre
Geschwindigkeit liegt in der Variablen v_mc. Alle diese Variablen sind öffentlich und
können daher zur Initialisierung direkt von anderen Programmteilen gesetzt werden.
Die Bewegung der Wolke um den Zeitschritt dt erfolgt durch Aufruf der Funktion
update_mc(dt).
Zur graphischen Darstellung einzelner Feldlinien dient die Methode plotline. Sie
gibt den Verlauf der gewünschten Feldlinie sowie einige weitere Parameter in entsprechende Dateien aus. plotline benötigt einige Größen, die lediglich intern in
der Methode distort zur Verfügung stehen, weswegen plotline zweckmäßigerweise von dort aufgerufen wird. plotline gibt dabei die Raumgitterpunkte in Zylinderkoordinaten aus. Dabei wird die Ausgabe in drei Dateien aufgeteilt. UGITTER nimmt
hierbei die Koordinaten der Punkte des ungezerrten Gitters auf, VGITTER_U sowie
VGITTER_O die Punkte der auf je einer Seite der Wolke herumgeführten Feldlinienabschnitte.
5.4.1 Schnittpunktberechnung
Die Berechnung der Schnittpunkte einer Feldlinie mit einem der Kreise erfolgt in
mehreren Schritten. Zunächst wird festgestellt, ob ein Schnitt erfolgt. Dazu wird die
Funktion (5.1) benötigt.
|(ϑ, r) , (ϑ0 , r0 )| =
q
−2 r r0 cos (ϑ0 − ϑ) + r02 + r2
(5.1)
67
Diese liefert für zwei beliebige Punkte (φ, r) und (φ0 , r0 ) deren Abstand voneinander
(Siehe auch Abschnitt A.2.2). Da die Punkte auf einem Spiralarm θ durch (ωt +
θ, vt) gegeben sind, kann man Schnitte desselben mit einem Kreis einfach durch
Einsetzen des Kreismittelpunktes sowie der Parametrisierung in Gleichung (5.1) und
Gleichsetzen dieses Ausdrucks mit dem Kreisradius erhalten. Man gelangt dann zur
Gleichung (5.2) mit % als dem Kreisradius.
sqrdist (θ,t, ((ϑ0 , r0 ) , %)) = %2 − (vt)2 − r02 + 2vtr0 cos (ϑ0 − ωt − θ)
(5.2)
Gleichung (5.2) stellt quasi einen vorzeichenbehafteten Abstand zu dem Kreisbogen dar. Negativ zeigt dabei an, dass der betrachtete Punkt außer-, positiv, dass
er innerhalb des Kreises liegt. Im Programm erfolgt die Lösung dieser Gleichung
numerisch durch die Benutzung des Brentverfahrens. Ein Problem stellt sich damit,
dass (mit Ausnahme der Tangierung) mindestens zwei verschiedene Schnittpunkte auftreten. Aus diesem Grund erwartet das Brentverfahren die Angabe von Intervallgrenzen für t, innerhalb deren nach einer Lösung gesucht werden soll. Man
muss also sicherstellen, dass die Intervallgrenzen jeweils so gewählt werden, dass
der gesuchte Schnittpunkt gefunden wird - und nur dieser. Dies wurde auf relativ brachiale Art gelöst: Das Gesamtintervall, gegeben durch die Grenzen für r als
dem Abstand zur Sonne, wird in n Teilintervalle geteilt. Für die Grenzen ti dieser Intervalle wird nun, beginnend bei dem niedrigsten Wert, also nahe der Sonne,
der Wert δ(ti ) = sqrdist(θ, ti , (ϑ0 , r0 ), %) berechnet. Wechselt δ(ti ) das Vorzeichen,
so befindet sich zwischen ti−1 und ti offenbar ein Schnittpunkt und man kann das
Brentverfahren auf dem Intervall [ti−1 : ti ] benutzen. Alles liegt hierbei bei der Wahl
der Intervalllängen ∆ti = ti+1 − ti . Werden sie zu weit gewählt, kann dies dazu
führen, dass Schnittpunkte übersehen werden, da trotz Schnittes kein Punkt im
Kreisinneren getroffen wird. Werden sie zu eng gewählt, bedeutet dies eine unnötige
Zeitverschwendung. Eine untere Schranke ist dabei durch die Diskretisierung der
s-Dimension vorgegeben. Sind si und si+1 zwei aufeinander folgende Gitterpunkte
in s, und wird zwischen beiden ein Schnittpunkt S0 gefunden, so muss dieser in der
vorliegenden Implementierung entweder mit si oder mit si+1 identifiziert werden.
Läge ein weiterer Schnittpunkt zwischen si uns si+1 , so würde dieser letztendlich
mit demselben Punkt wie der erste identifiziert. Im diskreten Raum erschienen die
beiden Schnittpunkte als nur einer, was einer Tangierung des Kreises entspricht und
nicht weiter berücksichtigt wird. Es macht also keinen Sinn, die Abstände so klein
zu wählen, dass die entsprechenden Bogenlängendifferenzen die Diskretisierung unterschreiten.
Ein weiteres Problem tritt vor allem im Fernfeld auf. Einundderselbe Kreis kann
mehrfach vom selben Spiralarm geschnitten werden. Nach dem Auffinden von zwei
Schnittpunkten darf also nicht einfach abgebrochen werden. Vielmehr muss der gesamte in Frage kommende Teil der Linie abgelaufen werden. Der Minimal- und
Maximalwert von t, zwischen denen nach Schnittpunkten gesucht werden muss,
68
hängt von der Ausdehnung der Wolke ab. Es gilt nämlich, dass bei einem gegebenen Kreis mit Mittelpunkt (φ0 , r0 ) sowie Radius %0 der minimale Abstand des
Kreises zur Sonne gleich rmin = r0 − %0 , der maximale gleich rmax = r0 + %0 ist.1 Mit
vsw tmin/max = rmin/max lässt sich damit das maximal zu durchsuchende Intervall zu
0
0
[ r0v−%
: r0v+%
] angeben.
sw
sw
5.4.2 Linienführung
Abbildung 5.1: Veranschaulichung der Begriffe “oberhalb” und “unterhalb”: Der Spiralarm A liegt der Definition gemäß oberhalb des Punktes p2 , jedoch unterhalb des
Punktes p1 . Er liegt somit zwischen beiden Punkten.
Im Abschnitt 4 wurde die Linienführung davon abhängig gemacht, ob eine Feldlinie
ober- oder unterhalb des Wolkenmittelpunktes vorbeiläuft. Das wesentliche Problem
hierbei ist die Definition von “oberhalb” (bzw. “unterhalb”). Tatsächlich sind diese
Begriffe schlicht mangels besserer Alternativen gewählt und nicht im herkömmlichen
Sinn zu verstehen. Sei p der Punkt, bezüglich dessen der Verlauf des Spiralarmes
θ0 charakterisiert werden soll und (θ0 , t) seine archimedischen Koordinaten (Siehe
Abschnitt A.2.3). Die Spirale selbst besitze den Formparameter β = ωv . Die Zylinderkoordinaten von p lauten dann (φ0 , r) = (ωt+θ0 , vt). Man betrachtet nun den Punkt
p̄ auf dem Spiralarm θ, welcher dieselbe radiale Entfernung vom Sipralzentrum wie
p aufweist. Dies ist p̄ = (φ, r) = (ωt + θ, vt).
Definition.
Ist ∆φ := φ0 − φ positiv, so verläuft der Arm θ unterhalb, sonst
oberhalb von p.
1
Dies liegt einfach daran, dass der Ursprung des Koordinatensystems mit dem Sonnenmittelpunkt
und also dem Spiralzentrum zusammenfällt.
69
Abbildung 5.1 zeigt die geometrische Bedeutung.
Man erkennt sofort, dass ∆φ = θ0 − θ ist.
Tatsächlich gebraucht wird diese Kategorisierung in der Simulation genau an einer
Stelle: Laut Abschnitt 4.3.3.3 ist der Winkel ψθ unter gewissen Umständen zu 2π−ψθ
zu korrigieren, nämlich dann, wenn der betrachtete Arm θ zwischen dem Punkt
pk und dem Wolkenmittelpunkt (φ, r)M C verläuft. Dies ist genau dann der Fall,
wenn der Arm bezüglich pk oberhalb und bezüglich (φ, r)M C unterhalb verläuft.2
Abbildung 5.1 veranschaulicht auch diesen Sachverhalt.
Die Definition von “oben” / “unten” mag willkürlich und im Nahfeld sinnlos erscheinen, doch ist sie einfach, lageunabhängig und erfüllt schlicht den gewünschten
Zweck.
2
Siehe Abschnitt 4.3.3.3.
70
6 Plausibilitätsbetrachtungen
6.1 Modellverhalten
Es ist zweckmäßig, das Verhalten des Modells auf Plausibilität hin zu untersuchen
und zu ermitteln, inwieweit es dem gewünschten entspricht.
Parameter
rM C
Wert
Siehe jew. Bild
vM C
vSW
2,0
K aκ
0,4 1
κM ax
rmc
0,4
δ
0,1
Tabelle 6.1: Parametrisierung, die zur Erstellung der Abbildungen 6.1 und 6.2 benutzt wurde. Die Wolkengeschwindigkeit spielt keine Rolle, da jeweils nur Schnappschüsse für einen festen Zeitpunkt betrachtet wurden.
Kernstück des ganzen Prozesses ist dabei die Verzerrung des s-Gitters. Die Abbildungen 6.1 und 6.2 zeigen durch das Programm ermittelte Verläufe gezerrter Feldlinien.
Die Parametrisierung ist in Tabelle 6.1 angegeben, jedoch sind die Graphen als qualitative Darstellungen gedacht und tragen daher keine quantitativen Beschriftungen.
Es ist jeweils angegeben, in welcher Entfernung von der Sonne sich das Zentrum
der Wolke befinden müsste um das jeweilige Bild zu erzeugen. Abbildung 6.1 zeigt
links einen für das Nahfeld, in welchem die Feldlinien nahezu radial gerichtet sind,
typischen Verlauf. Der rechte Teil der Abbildung stellt eine für das Fernfeld typische
Situation dar, die Feldlinien weichen hier bereits stark von der radialen Richtung
ab. Abbildung 6.2 zeigt den Verlauf der Feldlinien in einem mittleren Abstand von
der Sonne.
Nochmals muss darauf hingewiesen werden, dass ausschließlich die Länge und nicht
der räumliche Verlauf einer Feldlinie sich auf das Roeloffsche Modell auswirkt. Dennoch liefert der räumliche Verlauf Hinweise auf die Plausibilität der Anpassungen.
Die Feldlinien werden wie gewünscht um die Wolke herumgeführt und schneiden
sich, wie von Feldlinien erwartet, nicht. Die Abstände zwischen gezerrten Feldlinien
scheinen dagegen relativ konstant und nicht mit dem Abstand vom Wolkenmittelpunkt zuzunehmen. Allerdings ist die Darstellung relativ ungenau. Darüber hinaus
ist für das Modell der geometrische Abstand zweier Feldlinien ohnehin nicht von
Bedeutung.
Sollten die Abstände zwischen zwei gezerrten Feldlinien in einer späteren Stufe des
Modells z.B. zur Berücksichtigung des Quertransports genutzt werden, so müsste
dies, beispielsweise durch Veränderung der Formel (4.17) zur Berechnung der Radien oder der des Mittelpunktes (4.18) eines Zerrkreises allerdings genauer unter-
71
Abbildung 6.1: Qualitativer Verlauf der gezerrten Feldlinien. Entspricht einer Entfernung des Wolkenzentrums vom Sonnenmittelpunkt von 0,4 AU (links) bzw. von
20 AU (rechts). Die innersten Punkte werden in der Situation des Fernfeldes nur
durch wenige Punkte definiert, daher wirken sie sehr zackig.
Abbildung 6.2: Qualitativer Verlauf der gezerrten Feldlinien für r = 6 AU, einen
mittleren Abstand der Wolke von der Sonne.
sucht werden. In diesem Fall wäre das größere Problem vermutlich aber ohnehin, die
Transportpfade genau senkrecht mit den Feldlinien schneiden zu lassen.
Auf Grund des additiven Ansatzes (4.27) kann nicht erwartet werden, dass die modifizierte Fokussierungslänge an den Grenzen des modifizierten Bereiches stetig ist.
Die Fokussierungslänge λ ist im von der Wolke beeinflussten Gebiet gerade durch
Gleichung (6.1) gegeben.
λ(c) =
1
λ0
1 − l(c)λ0 (c)
,l =
A cos πc π
1 + sin πc ∆s
(6.1)
Hierbei ist λ0 die ursprüngliche Fokussierungslänge des unmodifizierten Feldes, ∆s
die Länge des gezerrten Feldlinienabschnittes, c ist die in Gleichung (4.27) definierte
72
λ
1/λ
B [Eiheitenlos]
20
0
AU 1/AU -
-20
-40
-60
-80
-100
-1
-0.5
0
0.5
1
s/∆s - s1/2
1.5
2
2.5
3
Abbildung 6.3: Die Fokussierungslänge λ entlang einer Feldlinie im Radialfeld B(r) =
1
sowie deren Inverses 1/λ. Der modifizierte Bereich beginnt bei c = 0 und endet bei
r2
c = 1. Klar sind die Unstetigkeisstellen an diesen beiden Punkten erkennbar. B ist
einheitenlos angegeben, da nur der relative Verlauf Einfluss auf die Fokussierung hat.
Die Bogenlänge ist in Vielfachen der Länge des veränderten Feldlinienabschnittes
gegeben. Auf Grund dieser Parametrisierung sind die Parameter der magnetischen
Wolke unerheblich. Es ist r = 0.1 AU c + 0.3 AU, d.h. der modifizierte Bereich
beginnt bei r = 0.3 AU und hat eine Länge von 0.1 AU.
Funktion, von s abhängig und nimmt somit ausschließlich Werte zwischen 0 und 1
1
an. Stetigkeit wäre offenbar nur gegeben, wenn für den Faktor 1−lλ
gerade
0
1 1 =
=1
1 − lλ0 c=0
1 − lλ0 c=1
gelte. Im allgemeinen Fall ist diese Forderung mit l(0) = l(1) = 0 äquivalent. Dies
A cos πc
ist jedoch nicht erfüllbar, da für c = 0 l = 1+A
π c=0 ⇐⇒ cos(0) = 0 =⇒
sin πc
Widerspruch und für c = 1 entsprechend cos(π) = 0 =⇒ Widerspruch folgte. Anschaulich zu erkennen ist dies im Plot 6.3, in dem unter Anderem der Verlauf von
λ für ein Radialfeld,also z.B. das Nahfeld der Sonne dargestellt ist. Dort tritt ein
klarer Sprung der Kurve von λ, ihrem Inversen λ1 sowohl bei c = 0 als auch bei c = 1
auf. 1/λ tritt im Modell auf. Letztendlich ist hierfür die Unstetigkeit des Magnetfeldes (siehe Abschnitt 4.4.1) an den Einflussgrenzen verantwortlich. Wegen dieser
Untstetigkeiten ist damit zu rechnen, dass geringere Schrittweiten in s bei der numerischen Behandlung nötig werden. Besonders bei Wolken in Sonnennähe war dies
tatsächlich notwendig. Allerdings gestaltete sich hier die Berechnung des Flussröhrenquerschnitts schwierig, so dass das Problem schlicht in einer besonders starken
Erhöhung der Fokussierung als in den Unstetigkeiten derselben liegen dürfte.
Die Singularität von λ bei c ≈ 0.5 entspricht den Erwartungen, da das Magnetfeld
dort ein lokales Maximum besitzt. Da das Modell nur den Faktor λ1 benutzt, spielt
diese keine weitere Rolle.
73
3
Ohne Wolke
rMC = 0.2
rMC = 0.4
rMC = 0.5
1e+11
Ohne Wolke
rMC = 0.2
rMC = 0.4
rMC = 0.5
2.5
2
Anisotropie
Intensität / N
1e+10
1.5
1
1e+09
0.5
0
1e+08
−0.5
0
2
4
6
8
10
Zeit / h
12
14
16
18
20
0
1
2
3
Zeit / h
4
5
6
Abbildung 6.4: Logarithmische Intensitätsveräufe und die aufgenommenen Anisotropien für Beobachter hinter einer magnetischen Wolke. Der Beobachter sitzt bei
r = 0.5AU, θ = 0◦ . Die einzelnen Szenarios unterscheiden sich durch den Abstand
rM C der Wolkenmittelpunkte von der Sonne. Diese sind jeweils angegeben. Als Referenz ist der Verlauf in der Situation ohne Wolke angegeben. Die Parameter sind
hierbei entsprechend Tabelle 6.2 gewählt.
6.2 Eine Implementationsstudie
vM C
Parameter
rM C
K aκ
vSW
Wert
Siehe jew. Bild 1.75 0.1 1.0
κM ax
rmc
0.3
δ
λr
0.2 0.1
Tabelle 6.2: Parametrisierung des Modells, wie sie bei den folgenden Plots Verwendung fand, sowie die in GREF genutzte radiale freie Weglänge.
Die im folgenden vorgestellte Implementation befindet sich zum Zeitpunkt der Abgabe in einem experimentellen Stadium. Dennoch kann man den Versuch unternehmen, anhand der von ihr gelieferten, zugegebener Maßen unvollkommenen Ergebnisse, Rückschlüsse auf die Güte des zu Grunde liegenden theoretischen Modells zu
schließen.
Man vergegenwärtige sich zunächst, wie die Wolke das Verhalten eines vorbeieilenden
Teilchens beeinflusst. Da sich die hier betrachteten Teilchen um Größenordnungen
schneller bewegen als eine magnetische Wolke, betrachtet man die Situation am
besten zunächst, als ob die Wolke still stünde, d.h. die Wolke befinde sich an einem
beliebigen, aber zeitlich unveränderlichen Punkt (θ, r) in Spiralkoordinaten.
Nun folgt man einem, hier zunächst δ-funktionsförmigen Teilchenauswurf, welcher
den Feldlinien von der Sonne weg folgt. Auf seinem gesamten Weg wird sich sein
Intensitätsprofil in s- wie auch in z-Richtung auf Grund der diffusiven Vorgänge abflachen. Da diffusive Prozesse nicht zur Akkumulation der diffundierenen Größe an
einem Raumpunkt führen können, sollte für endliche Zeiträume die räumliche Verteilung der Teilchen jedoch stets ein Maximum aufweisen. Dieses Maximum manifestiert sich in dem Intensitätsverlauf, welchen ein Beobachter an einem bestimmten
Raumpunkt aufnimmt, stets als mehr oder minder stark ausgeprägter Peak. Dabei
ist der initiale Teilchenpuls vollständig fokussiert. Durch die Pitchwinkeldiffusion
74
1e+09
10
ϑ = 0°
ϑ = 0°
8
1e+08
6
Intensität
Anisotropie
1e+07
4
1e+06
2
100000
0
10000
−2
0
5
10
15
20
t [h]
25
30
35
0
5
10
15
20
25
30
35
t [h]
Abbildung 6.5: Logaritmisches Intensitäts- (links) und Anisotropieprofil, wie es von
einem Beobachter bei der Passage einer magnetischen Wolke aufnimmt. Der Beobachter sitzt bei r = 0.64AU , der Wolkenmittelpunkt passiert den Beobachter bei
t ≈ 28 h mit einem Radius von ρM C = 0.128. Der Zeitpunkt der Passage ist gekennzeichnet. Mit Ausnahme der statischen Plots wurde der Wert von r2l wie im Text
erwähnt verstetigt. Man beachte den eigentlich unmöglichen Anstied der Anisotropie
auf über 8.
wird das Pitchwinkelspektrum nach und nach geweitet. Fokussierte Teilchen besitzen im Wesentlichen eine Geschwindigkeitskomponente parallel zur Feldlinie. Da die
kinetische Energie für alle Teilchen als identisch angenommen wird, bewegen sich
fokussierte Teilchen schneller entlang der Feldlinie fort als nicht fokussierte. Die ersten Teilchen, die ein Beobachter registriert, sollten daher überproportional fokussiert
sein. Da der initiale Strom vollständig fokussiert war, sollte in den Anisotropie- wie
auch den Intensitätsverläufen, die ein Beobachter aufnimmt, also stets relativ früh
ein Maximum1 als Relikt des ursprünglichen δ-Peaks auftreten.
Als Folge der Querdiffusion wird entlang der zentralen Feldlinie, also der Feldlinie,
auf welche injiziert wird, die Zahl der insgesamt transportierten Teilchen sinken, da
ein stetiger Abtrag auf andere Feldlinien erfolgt.
Solange sich die Masse der Teilchen weit genug von der Wolke weg befindet, wird
sich deren Verhalten ebenso darstellen, als existierte die Wolke nicht. Entlang der
Feldlinien um die Wolke herum nimmt das Magnetfeld zunächst zu.2 Lässt man das
Wolkenzentrum hinter sich, sinkt sie wieder auf den Wert des ungestörten Feldes ab.
Hierbei ist zu bemerken, dass das Maximum der Feldstärke nicht zwingend denselben
radialen Abstand wie der Wolkenmittelpunkt besitzen muss, sondern, abhängig von
der Gestalt des ungestörten Feldes nach vorne oder hinten verschoben sein kann.
Wegen des zunächst also konvergierenden Magnetfeldes sollten von der Sonne aus
auf die Wolke zu eilende Teilchen tendenziell an der Wolke rückgestreut werden.
Das konvergierende Magnetfeld entspricht nämlich gerade der Konfiguration eines
1
Im Falle der Anisotropie ist sich daran zu erinnern, dass sie den Mittelwert der Pitchwinkelverteilung darstellt, µ ∈ [−1 : 1] liegt und |µ| = 1 maximale Fokussierung bedeutet.
2
In einem stark inhomogenen Feld muss dies nicht unbedingt der Fall sein. Ein Maximum ist
dann ebenso wenig zu erwarten. Im interplanetaren Feld ist in hinreichender Entfernung von
der Sonne die Annahme eines Maximums wegen des abfallenden Feldverlaufs gerechtfertigt.
75
magnetischen Spiegels (siehe Abschnitt 1.2.5).
Die Teilchen, welche die Wolke passieren können, werden auch zu einem gewissen
Maße gestreut, so dass das Pitchwinkelspektrum des an der Wolke vorbeigelangten
Stromanteils am Punkt maximaler Feldstärke geweitet udn derssen Anisotropie abgefallen sein sollte. Da das Feld anschließend tendenziell wieder abfällt, wird der dort
vorhandene Strom anschließend wieder fokussiert. Ob der Strom, nachdem er sich
hinreichend weit von der Wolke entfernt hat, stärker oder weniger stark fokussiert
ist als im Falle ohne Wolke, ist allerdings nicht einfach zu entscheiden. Die Streuung
wie die anschließende Fokussierung hängen entscheidend von der Feldänderung ab.
Die an der Wolke reflektierten Teilchen werden auf ihrem Weg zur Sonne wiederum der Diffusion ausgesetzt, so dass ein weiterer Abtrag von der zentralen Feldlinie
angenommen werden kann.
Die Wolke wirkt also wie ein Filter, welcher die schnellen und also stark fokussierten Teilchen passieren lässt, die langsameren, weniger fokussierten Teilchen jedoch
reflektiert und so am Vorbeizug hindert. Am Ort des Magnetfeldmaximums geht die
Fokussierungslänge gegen unendlich. Alle Teilchen, die diesen Ort erreichen, können
ihn ohne Störung schnell wieder verlassen. Im anschließend divergierenden Feld werden sie darüber hinaus fokussiert und daher schnell von der Wolke forttransportiert.
Der Bereich um das Magnetfeldmaximum wird also durch die Wolke von Teilchen
relativ frei gehalten. Beim Vorbeizug einer Wolke am Beobachter wird die Intensität
daher zunächst stark fallen. Nach dem Vorbeizug der Wolke erreicht den Beobachter
dann die Zone, in der sich Teilchen zwischen Wolke und Sonne entsprechend einer
magnetischen Flasche gefangen befinden. Die Intensität wird wiederum ansteigen.
Da in der Zone hinter dem Feldmaximum vermehrt Teilchen reflektiert werden, werden sich hier ebenso vermehrt zur Sonne hin bewegende Teilchen aufhalten. Diese
führen dazu, dass der Beobachter einen Abfall der Anisotropie registriert. Genügend
lange nach dem Vorbeizug der Wolke werden sich alle Werte nach und nach wieder
normalisieren.
Abbildung 6.5 zeigt vom hier entworfenen Programm erzeugten zeitlichen Profile von
logarithmischer Intensität und (nichtlogarithmischer) Anisotropie. Der Beobachter
sitzt hierbei auf der zentralen Feldlinie, auf der auch die Wolke läuft, bei einem radialen Abstand von r = 0.64 AU. Die Wolke wird bei r = 0.2 AU bei t = 0.0 h in die
Domäne eingesetzt, die Injektion erfolgt zwischen Sonne und Wolke. Die Passage des
Wolkenmittelpunktes ist eingezeichnet. Man erkennt, dass mit der Passage die Intensität einbricht und gleichzeitig die Anisotropie abfällt. Der Abfall der Intensität um
den Punkt der Passage erfolgt wie erwartet. Bei der Interpretation ist zu berücksichtigen, dass die Wolke nicht passiert werden kann, und der Beobachter stattdessen um
diese herum gedrückt wird. Die Tatsache, dass das Intensitätsminimum dem Wolkenzentrum nachfolgt, kann numerischen Ursprunges sein (siehe Abschnitt 6.3). Der
Abfall der Anisotropie nach Vorbeizug der Wolke entspricht ungefähr den Erwartungen. Allerdings sind alle Grafen offensichtlich von starken Störungen überlagert.
Eine detailiertere Analyse der Grafenverläufe verbietet sich leider auf Grund der
Tatsache, dass Feinstrukturen der Grafen nicht zweifelsfrei als nicht numerischen
76
Ursprunges identifiziert werden können. Auch kann nicht verschwiegen werden, dass
verschiedene Szenarien mit dieser experimentellen Implementation überhaupt nicht
mehr sinnvoll bearbeitbar sind. Im Folgenden soll eine kurze Analyse möglicher Ursachen betrieben werden.
6.3 Fehleranalyse
3
Ohne Fokussierung
Ohne Gitterzerrung
Ohne Wolke
2.5
Anisotropie
2
1.5
1
0.5
0
−0.5
0
1
2
3
4
5
t [h]
6
7
8
9
10
Abbildung 6.6: Anisotropieprofile, aufgenommen für einen Beobachter bei r = 0.34
AU. gezeigt ist jeweils dasselbe Szenario, einmal ohne magnetischer Wolke, einmal
ohne Verzerrung des s-Gitters und einmal ohne Veränderung der Fokussierungslänge.
Der verwandte Parametersatz entspricht wiederum den in Tabelle 6.2 gegebenen.
Die Grafen für Anisotropie und Intensität zeigen starke Schwankungen und sich teils
fast periodisch. Dabei wechseln sich Gebiete relativer Stabilität mit Gebieten starker
Schwankung ab. Die Übergänge sind oft abrupt. Auch zeigen sich diese Störungen
in allen Bereichen der Domäne mit Ankunft der ersten Teilchen. Diese Gebiete werden teils aber erst 15 Stunden oder später von der Wolke durchquert und sollten
daher von der Wolke nicht beeinflusst werden. Eventuell durch die Wolke hervorgerufene Schwankungen sollten durch die verschiedenen diffusiven Vorgänge auf dem
Weg bis zum Beobachter allerdings längst beseitigt worden sein. Dies deutet stark
darauf hin, dass diese Schwankungen tatsächlich nicht Teil der Lösung sind, sondern vielmehr Artefakte der numerischen Verfahren. Ein Lauf des Prototypen ohne
Einbringen einer Wolke identische Werte liefert allerdings zum ursprünglichen GREF,
soweit feststellbar, identische Lösungen. Dies mag an der Robustheit des Programmes bzw. des, verglichen mit einer Wolke, relativ einfachen Szenariobaus liegen.
77
Auffällig ist auch, dass bei statischen Situationen, also Szenarien, in welchen die
Wolke sich nicht bewegt, keine erkennbaren Störungen auftreten. Die Abbildung 6.4
zeigt mehrere solcher Szenarien für verschiedene Wolkenaufenthaltsorte. Dies könnte
tendenziell dahingehend interpretiert werden, dass die zeitliche Auflösung zu grob
gewählt ist. Allerdings zeigte eine Erhöhung der Auflösung um den Faktor 10 keine Auswirkung. Weiterhin scheinen die Störungen mit abnehmendem Wolkenradius
tendenziell zuzunehmen, bei einem relativen Radius von δ = 0.1 scheinen Anisotropie und Intensität gar Singularitäten anzusteuern. Als Ursache hierfür kommen
grundsätzlich mehrere Faktoren in Frage. Die Tatsache, dass der Wolkenradius die
Störungen anscheinend beeinflusst, könnte darauf hindeuten, dass die Auflösung des
Gitters entlang der Feldlinie zu grob gewählt wurde. Verschiedene Simulationen mit
Gitterauflösungen von 0.1 bis 0.0005 AU zeigten jedoch im Wesentlichen identische
Ergebnisse. Auch eine Verdopplung der Zahl der Gitterpunkte des Pitchwinkelgitters
lies die Lösungen unverändert.
Damit die Lösungen stabil bleiben, sind verschiedene, bereits in Abschnitt 2.3.2 erwähnte Stabilitätskriterien zu erfüllen. Sowohl das Lax-Richtmyer-Kriterium (2.20)
als auch das Courant-Friedrichs-Levy-Kriterium (2.21) können durch sich ändernde Abstände ds im s-Gitter nur verletzt werden, wenn diese Abstände abnehmen.
Da das Modell diese jedoch ausschließlich verlängern kann, kommt eine Verletzung
dieser beiden Bedingungen nicht in Frage. Zusätzlich wird im Code des Prototypen
abgeprüft, ob die Weglängen abnehmen. Dies wurde nicht festgestellt. Es verbleiben
die Bedingungen an die Fokussierungslänge (2.22) für den µ - Transport. Die erste
der beiden gibt einen minimalen Wert der Fokussierungslänge vor, der nicht unterschritten werden darf. Auch dies wird im Code abgefangen, vergleiche Abschnitt 5.4.
Die zweite stellt Bedingungen an die Koeffizienten des Iljinschemas. Die Einhaltung
dieser Bedingung sollte durch die in Abschnitt 5.4 erläuterte Methode garantiert
sein. Tatsächlich war eine derartige Korrektur in einigen Fällen erforderlich. Ob
die Korrektur die Stabilität garantiert, konnte hier leider nicht mehr ermittelt werden. Dieses Stabilitätskriterium verbleibt daher zunächst als potentieller Verursacher
möglicher Instabilitäten.
Vergleicht man Lösungen ein- und desselben Szenarios, bei dem einmal auf die
Zerrung des S-Gitters und einmal auf die Änderung der Fokussierungslänge verzichtet wurde, so erkennt man in beiden Fällen, dass die Lösung dennoch gestört
bleibt. Abbildung 6.6 stellt diese Situation dar, wobei im Falle der ausgeschalteten
s-Gitterzerrung besonders deutlich die hohe Regelmäßigkeit der Störungen hervortritt. Dies deutet auf den µ- Transport als Ursprung des Problems, da in ihn sowohl
die Abstände des s-Gitters als auch die Fokussierungslänge mit eingehen. Wie oben
erläutert ist für dessen stabile numerische Behandlung die Erfüllung eines Kriteriums notwendig, dessen Verletzung als einziges nicht endgültig ausgeschlossen werden
kann.
Eine weitere mögliche Fehlerquelle könnte in den Unstetigkeitsstellen im Verlauf von
1
r2l= 2λ
liegen. Doch wurde für alle hier gezeigten Grafen der für die Unstetigkeit
verantwortliche additive Term aus Gleichung (4.29) mit sin(c) gewichtet, so dass der
78
additive Term an den Rändern des Zerrbereiches gegen 0 geht und r2l insgesamt
dort somit wieder stetig wird. Diese Unstetigkeitsstellen können also auch nicht die
Ursache sein.
Es sei allerdings darauf hingewiesen, dass für die Stabilität der Verfahren erforderlich
ist, dass alle auftretenden Funktionen hinreichend glatt sind. Im Rahmen dieser
Arbeit konnte leider nicht mehr überprüft werden, ob dies zu besagten Störungen
führt.
Alles deutet somit auf ein numerisches Problem bei der numerischen Behandlung des
µ-Transportes hin. Hier wäre vermutlich der nächste Ansatzpunkt bei dem zweiten
Stabilitätskriterium für das Iljinschema zu suchen.
Nicht vernachlässigt werden sollte auch die Möglichkeit, dass das Problem durch
einen relativ harmlosen Programmierfehler ersteht.
79
7 Zusammenfassung und Ausblick
In der vorliegenden Arbeit wurden die physikalischen Grundlagen zum Verständnis des Verhaltens des Plasmas im interplanetaren Raum dargelegt. Das Phänomen
magnetischer Wolken wurde als Störung des interplanetaren Magnetfeldes definiert
und Erkenntnisse über diese aus verschiedener Literatur zusammengetragen und ein
Überblick über den Stand der Forschung hierzu gegeben. Die Grundlagen des interplanetaren Transports hochenergetischer Teilchen wurden dargelegt und darauf
aufbauend ein Modell entwickelt, welches die Auswirkungen magnetischer Wolken
auf den interplanetaren Transport beschreibt. Eine Strategie zur Implementation
dieses Modells in das bestehende Programm GREF wurde erläutert und eine erste
Testimplementation durchgeführt. Diese krankt zwar noch an numerischen Defekten, liefert aber dennoch Ergebnisse, welche die Validität des Modells zu stützen
scheinen. Weiterhin wurde eine erste Analyse möglicher Fehlerquellen in der vorliegenden Implementation geliefert.
Dabei deutet Einiges auf ein Problem in der Schnittstelle des eigentlichen Programms GREF und dem neu erstellten Modul magneticcloud.f95. Unter Umständen
ist das Problem also ein rein programmiertechnisches. Vieles weist allerdings in die
Richtung, dass das Iljin-Verfahren, mit dem der µ-Transport behandelt wird, in die
Grenzbereiche seiner Anwendbarkeit geführt wird. Leider war es im Rahmen des für
diese Arbeit zur Verfügung stehenden Zeitrahmens nicht mehr möglich, den letztendlichen Ursprung dieses Problems zweifelsfrei zu finden und zu eliminieren. Eine
abschließende Verifikation des Modells kann damit nicht gegeben werden.
Dieser Defekte Herr zu werden, eine alltagstaugliche Implementation zu erstellen,
wäre somit die nächste große Aufgabe, der man sich zu stellen hätte.
Raum für weitergehende Erweiterungen der Implementation wäre damit reichlich gegeben. So besitzt der im Rahmen dieser Arbeit angefertigte Prototyp die wünschenswerte Fähigkeit, Wolken mit einer Domänengrenze schneiden zu lassen, nicht. Um
die vollständige Bewegung einer Wolke zu simulieren, wäre es jedoch günstig, diese
über die innere Domänengrenze einschießen zu können. Eine künftige Implementation sollte dies allerdings ermöglichen. In dieser Arbeit wurden lediglich Wolken, bei
welchen Rekonnexion hinterhalb der Wolken erfolgen konnte, berücksichtigt. Einer
der nächsten Schritte sollte also darin bestehen, durch Anpassung der Bewegung
sowie Erhöhung des Verzerrungsfaktors für Feldlinien, die hinter der Wolke laufen,
auch diese Art von Wolken in das Modell einzubeziehen.
Weiterhin sind nach wie vor einige Probleme der Theorie nicht zufriedenstellend zu
beantworten. Die Bewegung der Wolke wirft im nicht mehr radialförmigen Fernfeld
80
der Sonne noch einige Fragen auf. Dem Aufbau unendlichen Drucks kann durch die
hier getroffene Annahme, dass die Wolke einem Spiralarm folgt, begegnet werden,
und MHD-Simulationen zeigen im Nahfeld tatsächlich einen Versatz der Wolke, der
in diese Richtung weist. Für das Fernfeld sollte dieses Thema jedoch noch genauer
untersucht werden.
Der Einfluss des interplanetaren Magnetfeldes auf den Quertransport ist hier als
effektiv vernachlässigbar eingestuft worden. Das Modell verzichtet daher auf eine
Modifikation des Quertransports. Die dazu getroffenen Annahmen sind hier allerdings nur ungenau. Genauere Analysen des Zusammenhanges zwischen Querdiffusionskoeffizienten und Magnetfeld bzw. numerischer Studien zu diesem Thema wären
vermutlich sinnvoll. Gegebenenfalls müsste der Quertransport im Modell angepasst
werden. Schließlich dürfte die Fortentwicklung des reinen Transportmodells und seiner Implementation, das die Betrachtung eines dreidimensionalen Szenarios ermöglicht zwischenzeitlich abgeschlossen sein. Damit böte sich die Möglichkeit, das hier
entwickelte Wolkenmodell aus der Ekliptikebene in den dreidimensionalen Raum zu
heben. Sollte sich die Argumentation in Abschnitt 2.2.4 als tragfähig erweisen, so
kann der dort hinzukommende meridionale Transport als von der Wolke ebenfalls als
unbeeinflusst angenommen werden. Das dreidimensionale Gitter besteht aus Kegeloberflächen. Dabei stellt deren eines Extrem die Ebene der Ekliptik, deren anderes
eine Gerade durch die Sonnenpole dar. Diese einzelnen Ebenen könnten entsprechend
der Ekliptik und unabhängig von den übrigen Ebenen behandelt werden. Einzig die
Lage des Wolkenmittelpunkts in einer Ebene müsste auf die Lage der Mittelpunkte
in den Nachbarebenen abgestimmt werden, so dass sich bei Betrachtung der gesamten Domäne die Wolkenmittelpunkte in den einzelnen Ebenen insgesamt an einer
Schlaufe entsprechend der Flusseilkonfiguration aufreihen. Dies wäre für nicht zu hohe Breitengrade einfach durch einen konstanten Abstand der Wolkenmittelpunkte
zur Sonne hin zu erreichen.
Solange allerdings keine ausgereifte Implementation verfügbar ist, macht eine wie
auch immer geartete Erweiterung des Modells keinen Sinn. Damit ist klar, dass
in dieser Arbeit zwar ein erstes plausibles Modell für die Berücksichtigung magnetischer Wolken im Roeleffschen Transportmodell erstellt wurde, doch verbleibt Einiges
als lediglich erster Ansatz noch unzureichend untersucht, manche Annahme wenig
belegt und vieles unberücksichtigt. Es ist die Tür hin zur Einbindung magnetischer
Wolken in das Roeloffmodell eröffnet, der Raum dahinter allerdings harrt noch seiner
Erschaffung.
81
A Mathematischer Anhang
A.1 Bezeichner
Modellparameter, die sich bei fester Wolkenposition nicht ändern, werden im Quellcode in eigenen Variablen gespeichert. Für von Feldlinie zu Feldlinie veränderliche
Parameter existieren größtenteils keine eigenen Variablen. Einen Überblick über die
Zuordnung Parameter - Variablenname bietet Tabelle A.1.
Typ
Parameter
Magnetische Wolke
δ
vM C
vSW
Maximalkreis
Bezugspunkt pk
rM ax
φM ax
ρM ax
θM ax
rk
φk
θk
κM ax
rmc
Bugwelle
Asymmetrie
Querschnitte
aκ
K
κ (vmc )
α
a
τ
Du
Do
d¯u
d¯o
Variable
Einheit
exp_fac
keine
v_f
keine
r_bis
AU
phi_bis
rad
rho_bis
AU
theta_bis
rad
r_k
AU
phi_k
rad
theta_k
rad
k_f
keine
h
k_vfac
AU
k_quot
keine
k_mc
AU
tangent_angle
rad
asym_fac
keine
t0_5_fac
keine
d_u
AU
d_o
AU
dMin_u
AU
dMin_o
AU
Tabelle A.1: Modellparameter und deren Namen in den Quellen.
v_f und k_f ist anders als im Modell relativ zu dem Abstand Sonne - Wolkenmittelpunkt angegeben.
82
A.2 Mathematischer Anhang
A.2.1 Konventionen
Alle Koordinatenangaben erfolgen, soweit nicht anders angegeben, in Polarkoordinaten der Form (φ, r) mit φ als den Winkel und r den radialen Abstand vom Ursprung.
Sei (φ0 , r0 ) das Spiralzentrum, im Allgemeinen (φ0 , r0 ) = (0, 0). Einzelne Feldlinien
werden mit dem Tangentenwinkel θ bezeichnet, mit welchem sie aus dem Spiralzentrum austreten:
θ = lim θ (t)
(A.1)
t→t0
θ (t) beschreibt hierbei den Tangentialwinkel am Punkt der Parametrisierung A (t),
A (t0 ) = (φ0 , r0 ) ist die Parametrisierung des Spiralzentrums. Die Gestalt der Spirale
wird im Abschnitt A.2.3 erläutert.
A.2.2 Transformationen
Sind zwei Polarkoordinatensysteme K und KT rans gegeben, wobei der Urpsrung von
K in den Koordinaten von KT rans mit (ϑO , rO ) gegeben ist, so lässt sich ein Punkt
mit den in System K gegebenen Koordinaten (ϑ, r) mittels
r sin ϑ − rO sin ϑO
r cos ϑ − rO cos ϑO
ϑT rans (ϑ, r) = arctan
q
2
rT rans (ϑ, r) =
−2 r rO cos (ϑO − ϑ) + rO
+ r2
(A.2)
(A.3)
in das System KT rans transformieren. Er hat dort dann die Koordinaten (ϑT rans , rT rans ).
A.2.3 Archimedische Spirale
Die Gestalt einer archimedischen Spirale ergibt sich aus dem Verhältnis β =
Arm Aθ kann als folgende Parametrisierung beschrieben werden:
ωs
,
vs
ein
83
Aθ,Zylinderkoordinaten (t) =
Aθ,Kartesisch (t) =
dAθ,Kartesisch
(t) =
dt
=
ωs t + θ
(A.4)
vs t
cos (ωs t + θ)
vs t
(A.5)
sin (ωs t + θ)
0 Aθ,y
(A.6)
=
0
Aθ,x
cos (ωs t + θ)
− sin (ωs t + θ)
vs
+ vs ωs t
sin (ωs t + θ)
cos (ωs t + θ)
Man kann generell zu jedem Punkt (φ, r) genau ein (θ, t) finden, so dass
φ
r
= Aθ (t)
(A.7)
gilt.
Jedem Punkt Aθ (t) ist hierbei ein Tangententialwinkel zuzuordnen:
0
Aθ,y
sin (ωs t + θ) + ωs t cos (ωs t + θ)
ϑ (t) = arctan 0 (t) = arctan
cos (ωs t + θ) − ωs t sin (ωs t + θ)
Aθ,x
(A.8)
Es ist zu beachten, dass dies den Winkel zwischen Tangente und kartesischer x Achse darstellt.
Die Bogenlänge eines Spiralarmes ergibt folgende Herleitung. Da die Bogenlänge
von der Wahl des Spiralarmes unabhängig ist, kann θ = 0 angenommen werden. Die
Gleichung (A.9) gibt die Bogenlänge ab r0 = 0 an.
r
Zvs Zt d
cos (ωs τ ) − ωs τ sin (ωs τ ) A (τ ) dτ = vs s (t) =
sin (ωs τ ) + ωs τ cos (ωs τ ) dτ
dτ
r0
vs
t0
Zr
s
=
cos
r0
Zr
=
p
2 2
ωs
ωs
ωs
ωs
ωs
ωs
ρ − ρ sin
ρ
+ sin
ρ + ρ cos
ρ
dρ
vs
vs
vs
vs
vs
vs
1 + β 2 ρ2 dρ
r0
s (r) =
84
1 p
βr 1 + β 2 r2 + arsinh βr
2β
(A.9)
Der Abstand eines Punktes p von einem Spiralarm A wird als die kürzeste Entfernung zwischen p und den auf dem Arm A liegenden Punkten p (t) (mit geeigneter
Parametrisierung t) definiert:
|p, Aθ | := min {|p, Aθ (t)| |t ∈ R}
pM in := Aθ (tM in ) mit |p, Aθ (tM in )| = |p, Aθ |
(A.10)
(A.11)
Da Aθ eine kompakte Menge darstellt, ist (A.10) definiert und insbesondere sichergestellt, dass wenigstens ein pM in ∈ Aθ existiert, welches Definition (A.11) erfüllt.
Es wird bei (in kartesischen Koordinaten) gegebenem
x
p=
y
die (quadratische) Abstandsfunktion
f (t) = (t vs sin (t ωs + θ) − y)2 + (t vs cos (t ωs + θ) − x)2
für den Abstand von p zum Punkt Aθ (t) auf dem Spiralarm Aθ minimiert.
Man erhält
t = −
sin (t ωs + θ) y + cos (t ωs + θ) x
ωs cos (t ωs + θ) y − ωs sin (t ωs + θ) x − vs
(A.12)
(A.13)
Diese Gleichung ist zwar analytisch nicht nach t aufzulösen, doch kann man numerisch einen Fixpunkt tM in bestimmen, und erhält damit pM in = Aθ (tM in ). Allerdings
ist hiermit mathematisch nicht klar, ob tM in eindeutig und die Definition von pM in
somit wohl bestimmt ist. Praktisch spielt dies für das Modell keine Rolle, ist doch
aus der Anschauung offenbar, dass Uneindeutigkeiten wenn überhaupt nur in Extremfällen auftreten können.
Ein Spiralarm Aθ wird als oberhalb des Punktes p verlaufend bezeichnet, falls der
gemäß (A.11) definierte Punkt weiter vom Zentrum der Spirale entfernt liegt als p
selbst. Praktisch wird auf Grund der nur schweren Handhabbarkeit dieser Weg zur
Ermittlung des Feldlinienverlaufes in der Regel nicht direkt gegangen.
85
Literaturverzeichnis
Aschwanden 2004
Aschwanden, Markus: Physics of the Solar Corona. Springer Verlag, 2004
Bird u. a. 1990
Bird, Michael ; Edenhofer, Peter ; Grün, Eberhard ; Leinert, Christoph ;
Mariani, Franco ; Marsch, Eckard ; Neubauer, Fritz ; Schwenn, Rainer ;
Schwenn, R. (Hrsg.) ; Marsch, E. (Hrsg.): Physics in the Inner Heliosphere.
Springer-Verlag, 1990
Bland 1972
Bland, D. R.: Solutions of Laplace’s Equation. Routledge & Kegan Paul, 1972
Bothmer u. Schwenn 1997
Bothmer, V. ; Schwenn, R.: The structure and origin of magnetic clouds in
the solar wind. In: Annales Geophysicae 16 (1997), S. 1–24
Burlaga u. a. 1981
Burlaga, L. F. ; Sittler, E. ; Mariani, F. ; Schwenn, R.: Magnetic loop
behind an interplanetary shock: Voyager, Helios and IMP 8 observations. In:
Journal of Geophysical Research Space Physics 86 (A8) (1981), S. 6673 – 6684
Burlaga 1991
Burlaga, Leonard F.: Magnetic Clouds. In: Schwenn, R. (Hrsg.) ; Marsch,
E. (Hrsg.): Physics and Chemistry in Space Bd. 21, Springer, 1991
Burlaga 1995
Burlaga, Leonard F.: Interplanetary Magnetohydrodynamics. Oxford University Press, 1995
Dasso u. a. 2007
Dasso, S. ; Nakwacki, M.S. ; Démoulin, P. ; Mandrini, C. H.: Progressive
Transformation of a Flux rope to an ICME. In: Solar Physics, 2007
Farrugia u. a. 1987
Farrugia, C. J. ; Elphic, R. C. ; Southwood, D. J. ; Cowley, S. W. H.:
Field and flow perturbations outside the reconnected field line region in flux
transfer events: Theory. In: Planetary and Space Science 35 No. 2 (1987), S.
227–240
86
Foullon u. a. 2007
Foullon, C. ; Owen, C. J. ; Dasso, S. ; Green, L. M. ; Dandouras, I. ;
Elliott, H. A. ; Fazakerley, A. N. ; Bogdanova, Y. V. ; Crooker, N. U.:
Multi-Spacecraft Study of the 21 January 2005 ICME. In: Solar Physics 244
(2007), S. 139–165
Goedbloed u. Poedts 2004
Goedbloed, J. P. ; Poedts, S.: Principles of Magnetohydrodynamics. Cambridge University Press, 2004
Gopalswamy u. a. 1998
Gopalswamy, N. ; Hanaoka, Y. ; Kosugi, T. ; Lepping, R. P. ; Steinberg,
J. T. ; Plunkett, S. ; Howard, R. A. ; Thompson, B. J. ; Gurman, J. ; Ho,
G. ; Nitta, N. ; Hudson, H. S.: On the Relationship Between Coronal Mass
Ejections and Magnetic Clouds. In: Geophysical Research Letters 25 (1998), S.
2485 – 2488
Gosling u. a. 2007
Gosling, J. T. ; Eriksson, S. ; McComas, D. J. ; Phan, T. D. ; Skoug,
R. M.: Multiple magnetic reconnection sites associated with a coronal mass
ejection in the solar wind. In: Journal of Geophysical Research 112 (2007)
Grant u. Phillips 1975
Grant, I. S. ; Phillips, W. R. ; Mandl, F. (Hrsg.) ; Ellison, J. (Hrsg.) ;
Sandiford, D. J. (Hrsg.): Electromagnetism. John Wiley & Sons Ltd., 1975
(The Manchester Physics Series)
Groth u. a. 2000
Groth, C. P. D. ; Zeeuw, D. L. ; Gombosi, T. I. ; Powell, K. G.: Three
dimensional MHD simulation of coronal mass ejections. In: Advances in Space
Research 26 (2000), S. 793–800
Gurnett u. Bhattacharjee 2005
Gurnett, Donald A. ; Bhattacharjee, Amitava: Introduction to Plasma
Physics. Cambridge University Press, 2005
Hatzky 1996
Hatzky, Roman: Winkelverteilungen energiereicher geladener Teilchen und die
Streueigenschaften des interplanetaren Mediums, Unversität Kiel, Diss., 1996
Henke 1999
Henke, Thomas: Ionisationszustände und magnetische Topologie koronaler Massenauswürfe, Technische Universität Carolo-Wilhelmina Braunschweig,
Diss., 1999
Jian u. a. 2006
Jian, L. ; Russell, C. T. ; Luhmann, J.G. ; Skoug, R. M.: Properties of
87
Interplanetary Coronal Mass Ejections at one AU during 1995-2004. In: Solar
Physics 239 (2006), S. 393–436
Jokipii 1966
Jokipii, J. R.: Cosmic-ray propagation. I. Charged particles in a random magnetic field. In: Astrophysical Journal 146 (1966), S. 480–487
Kallenrode 1993
Kallenrode, May-Britt: Particle Propagation in the Inner Heliosphere. In:
Journal of Geophysical Research 98, No. A11 (1993), S. 19037–19047
Kallenrode 2001
Kallenrode, May-Britt: Space Physics. Springer, 2001
Kallenrode 2002
Kallenrode, May-Britt: Magnetic clouds and interplanetary particle transport: A numerical model. In: Journal of Atmospheric and Solar-Terrestrial
Phyiscs 64 (2002), S. 1973–1978
Kilpua u. a. 2009
Kilpua, E. K. J. ; Liewer, P. C. ; Farrugia, C. ; Luhmann, J. G. ; Möstl,
C. ; Li, Y. ; Liu, Y. ; Lynch, B. J. ; Russell, C. T. ; Vourlidas, A. ;
Acuna, M. H. ; Galvin, A. B. ; Larson, D. ; Sauvaud, J. A.: Multispacecraft
Observations of Mangetic Clouds and their Solar Origins between 19 and 23 May
2007. In: Solar Physics 254 (2009), S. 325–344
Lampa 2006
Lampa, Florian: Numerik des 2-D-Transportes von geladenen Teilchen in fluktuierenden Magnetfeldern, Universität Osnabrück, Diplomarbeit, 2006
Langer 1993
Langer, Erasums: Programmieren in Fortran. Springer Verlag, 1993
Lepping u. a. 2002
Lepping, R. P. ; Berdichevsy, D. ; Szabo, A. ; Lazarus, A. J. ; Thompson,
B. J.: Upstream Shocks and Interplanetary Magnetic Cloud Speed and Expansion: Sun, Wind and Earth Observations. In: Lyu, L. H. (Hrsg.): Proceedings of
COSPAR Colloquium Bd. 87, 2002
Lepping u. a. 2008
Lepping, R. P. ; Wu, C. C. ; Berdichevsky, D. B. ; Ferguson, T.: Estimates
of magnetic cloud expansion at 1 AU. In: Annales Geophysicae 26 (2008), S.
1919–1933
McComas u. Gosling 1988
McComas, D. J. ; Gosling, J. T.: Interplanetary Magnetic Field Draping
About Fast Coronal Mas Ejecta in the Outer Heliosphere. In: Journal of Geophysical Research 93 (1988), S. 2519–2526
88
Osherovich u. a. 1993
Osherovich, V. A. ; Farrugia, C. J. ; Burlaga, L. F.: Dynamics of Aging
Magnetic Clouds. In: Advances in Space Research 13 (1993), S. 657–662
Petrie 2007
Petrie, G. J. D.: Potential Magnetic Field around a Helical Flux-rope Current Structure in the Solar Corona. http://science-advisor.net/article/
astro-ph/0702165. Version: Februar 2007
Prölss 2001
Prölss, Gerd W.: Physik des erdnahen Weltraums. Springer-Verlag, 2001
Quan-Lin u. a. 2003
Quan-Lin, Fan ; Feng-Si, Wei ; Xue-Shang, Feng: Numerical Simulation on
a Possible Formation Mechanism of Interplanetary Magnetic Cloud Boundaries.
In: Communications in Theoretical Physics 40 (2003), S. 247–252
Raith 2006
Raith, Wilhelm: Bergmann/Schäfer - Lehrbuch der Experimentalphysik. Bd. 2:
Elektromagnetismus. de Gruyter, 2006
Reif 1975
Reif, Frederick ; Muschik, W. (Hrsg.): Statistische Physik und Theorie der
Wärme. de Gryuter, 1975
Riley u. Crooker 2004
Riley, Pete ; Crooker, N. U.: Kinematik treatment of coronal mass ejection
evolution in the solar wind. In: The Astrophysical Journal 600 (2004), S. 1035–
1042
Romashets u. Vandas 2001
Romashets, E. ; Vandas, M.: Modelling of IMF draping around a super-sonic
magnetic cloud. In: Proc. SSOLSPA: The Second Solar Cycle and Space Weather
Euroconference”, 2001
Romashets u. a. 2008
Romashets, E. ; Vandas, M. ; Poedts, S.: Magnetic field disturbances in
the sheath region of a super-sonic interplanetary magnetic cloud. In: Annales
Geophysicae 26 (2008), S. 3153–3158
Stepanova u. Kosovichev 1993
Stepanova, T. V. ; Kosovichev, A. G.: Interplanetary shocks generated by
expanding magnetic loops. In: Advances in Space Research 13 (1993), S. 651–656
Vandas u. Fischer 1995
Vandas, M. ; Fischer, S.: Simulation of magnetic cloud propagation in the
inner heliosphere in two dimensions: 1. A loop perpendicular to the ecliptic plane.
In: Journal of Geophyiscal Research 100 (1995), S. 12285–12292
89
Vandas u. a. 1996
Vandas, M. ; Fischer, S. ; Dryer, M. ; Smith, Z. ; Detman, T.: Simulation
of magnetic cloud propagation in the inner heliosphere in two dimensions: 2.
A loop parallel to the ecliptic plane and the role of helicity. In: Journal of
Geophysical Research 101 (1996), S. 2505–2510
Vandas u. Ostrčil 2000
Vandas, M. ; Ostrčil, D.: Magnetic cloud evolution: A comparison of analytical and numerical solutions. In: Journal of Geophysical Research 105 (2000),
S. 12605–12616
Vandas u. a. 2003a
Vandas, M. ; Romashets, E. P. ; Walari, S.: Modeling magnetic fields around
magnetic clouds of different geometries. In: Proc. ISCS 2003 Symposium, ’Solar
Variability as an Input to the Earth’s Environment’, 2003
Vandas u. a. 2003b
Vandas, M. ; Romashets, E. P. ; Watari, S.: Potential magnetic fields around
flux ropes. In: Astronomy & Astrophysics 412 (2003), S. 281–292
Wu u. Lepping 2007
Wu, Chin-Chun ; Lepping, R. P.: Comparison of the Characteristics of Magnetic Clouds and Magnetic Cloud-like structures for the Events of 1995-2003.
In: Solar Physics 242 (2007), S. 159–165
Zhong u. a. 2005
Zhong, Ding-Kun ; Wei, Feng-Si ; Xue, Shang-Feng ; Yang, Fang: New Evidence for Magnetic Reconnection in the Tail of Interplanetary Magnetic Cloud.
In: Chinese Physics Letters 22 (2005), S. 3225–3228
90
Abbildungsverzeichnis
1.1
1.2
1.3
1.4
1.5
Das Frozen-In-Prinzip
Rekonnexion . . . . . .
Gyration . . . . . . . .
Magnetische Flasche .
Das solare Magnetfeld
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2.1
Raumgitter zur numerischen Lösung der Transportgleichung . . . . . 32
3.1
3.2
3.3
3.4
Messdaten einer mag. Wolke . . . . . .
Flussseil . . . . . . . . . . . . . . . . .
Schnitt durch eine magnetische Wolke .
Feldverlauf um eine magnetische Wolke
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
36
38
39
43
4.1
4.2
4.3
4.4
Abfolge zur Feldlinienzerrung
Assymetrie . . . . . . . . . . .
Feldlinienzerrung . . . . . . .
Feldlinienkompression . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
48
51
57
61
5.1
Bestimmung der Feldlinienlage . . . . . . . . . . . . . . . . . . . . . . 69
6.1
6.2
6.3
6.4
6.5
6.6
Feldlinienverlauf für verschiedene Feldkonfigurationen
Feldlinienverlauf für mittlere Asymmetrie . . . . . . .
Fokkussierungslänge entlang einer Feldlinie . . . . . .
Profile statischer Wolken . . . . . . . . . . . . . . . .
Profile einer dynamischen Wolke . . . . . . . . . . . .
Anisotropieprofil mit verschiedenen Konfigurationen .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
12
13
14
18
72
72
73
74
75
77
91
Tabellenverzeichnis
6.1
6.2
Parametersatz 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Parametersatz 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
A.1 Modellparameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
92
Eidesstattliche Versicherung
Hiermit versichere ich, dass ich die vorliegende Arbeit selbstständig und nur unter
Verwendung der angegebenen Hilfsmittel und Quellen angefertigt habe.
Osnabrück, den
Michael Beer