Up-Sidedown Pendel
Werbung

pendulum.c
Thomas Baumgartner, Mat.nr. 0425162
Alexander Gross, Mat.nr. 0425230
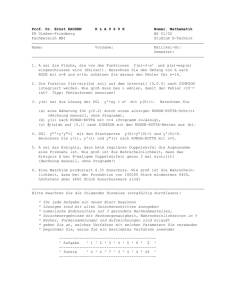
Aufgabenstellung
m
q
L
ht A sin wt
1
q t g Aw 2 sin wt sin q t 0
L
q(t) durch Integration mit
CVODE berechnen
Phasenraumpunkte (A, w)
bestimmen, für die das
Pendel stehen bleibt
Reduktion auf 1. Ordnung
y1 t q t
y t qt
N_Vector y
2
y1 t y2 t
1
y 2 t g Aw 2 sin wt sin y1
L
N_Vector ydot
Rechte Seite der Gleichung
static void f(integer N, real t, N_Vector y, N_Vector ydot,
void *f_data)
{
double* v_y;
double* v_ydot;
v_y = N_VDATA(y);
v_ydot = N_VDATA(ydot);
v_ydot[0] = v_y[1];
v_ydot[1] = (1/L)*(g-A*pow(w,2)*sin(w*t))*sin(v_y[0]);
}
Betriebsarten
q(t) berechnen
(A, w) bestimmen
Parameter:
A, w, q0
Parameter:
A1, A2, w1, w2, Ares, wres, q0
Ausgabedatei:
theta.dat
Ausgabedatei:
phasespace.dat
Ablauf: q(t) berechnen
Programm mit gewünschten Parametern
aufrufen
Integration von t = 0 bis t = 10 s mittels
linearem Solver CVSPGMR und AdamsMethode
Ausgabe in Datei theta.dat für jeden
berechneten Zeitpunkt
Code: q(t) berechnen
cvode_mem = CVodeMalloc(NEQ, f, T0, y, ADAMS, FUNCTIONAL,
SS, &reltol, &abstol, fdata, NULL, FALSE, NULL, NULL, NULL);
if(cvode_mem == NULL) { printf("CVodeMalloc failed.\n");
return(1); }
while(t <= Tend){
flag = CVode(cvode_mem, TSTEP, y, &t, ONE_STEP);
if (flag != SUCCESS) { printf("CVode failed, flag =
%d.\n", flag); return(1); }
fprintf(fout, "%e %e %e\n", t, v_y[0], v_y[1]);
++timeSteps;
}
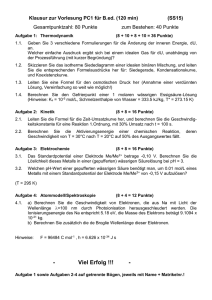
Beispiel: q(t) berechnen
./pendulum 0.2 10 0.02
Calculating Theta(t) with the following parameters:
A = 0.150000
w = 70.000000
Th0 = 0.020000
Integration finished. 9994 time steps calculated.
Beispiel: q(t) berechnen
Ablauf: (A, w) bestimmen
Programm mit gewünschten Parametern
aufrufen
Schleifen für die Wertebereiche von A und
w werden durchlaufen
Integration von t = 0 bis t = 10 s für jedes
(A, w)-Wertepaar (CVSPGMR mit AdamsMethode)
Ablauf: (A, w) bestimmen
Stabilitätskriterium 1:
q t q 0 5
Stabilitätskriterium 2:
q t q0 q0
Ausgabe in Datei phasespace.dat für jedes
Wertepaar (A, w) mit stabiler Lösung
Code: (A, w) bestimmen
while((t <= Tend)&&(flagStable == 1)){
.
.
.
if (fabs(v_y[0] - Th0) > ThTOL){
flagStable = 0;
}
}
if (flagStable == 1){
.
.
.
if (fabs(ThAvg - Th0) <= ThAvgTol){
printf("Stable solution found: A = %f, w = %f\n", A, w);
fprintf(fout, "%e %e\n", A, w);
++stablePoints;
}
}
Beispiel: (A, w) bestimmen
./pendulum 0 1 0 100 0.01 0.5 0.02
Searching phase space for stable solutions with the
following parameters:
A = 0.000000 ... 1.000000
w = 0.000000 ... 100.000000
Ares = 0.010000
wres = 0.500000
Th0 = 0.020000
Stable solution found: A = 0.060000, w = 87.000000
Stable solution found: A = 0.060000, w = 94.000000
.
.
.
Phase space analysis finished. 1388 stable solutions found.
Beispiel: (A, w) bestimmen