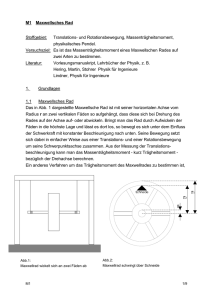
Mechanik 5.nb - Hochschule Trier
Werbung

Mechanik 5.nb *UXQGODJHQGHU3K\VLN Vorlesung im Fachbereich VI der Universität Trier Fach: Geowissenschaften Wintersemester 2000/2001 'R]HQW 'U.DUO0ROWHU 'LSORP3K\VLNHU )DFKKRFKVFKXOH7ULHU 7HO )D[ (0DLOPROWHU#IKWULHUGH ,QIRV]XU9RUOHVXQJXQWHUKWWSZZZIKWULHUGHaPROWHUJGS Version: 1.2 18.04.01 /LWHUDWXU • • • • • • • • • 6WURSSH: 3K\VLN, Hanser Fachbuchverlag, 1999, ISBN 3-446-21066-0 +HULQJ0DUWLQ6WRKUHU: 3K\VLNIU,QJHQLHXUH, Springer, Berlin; VDI, 1999, ISBN 3-540-66135-2 3DXO$7LSOHU: 3K\VLN, Spektrum Akademischer Verlag, 2000, ISBN 3-86025-122-8 *HUWKVHQ: 3K\VLN, Springer Verlag, 1999, ISBN 3-540-65479-8 %URQVWHLQ6HPHQGMDMHZ: 7DVFKHQEXFKGHU0DWKHPDWLN, Verlag Harri Deutsch, 2000, ISBN 3-8171-2005-2 -UJHQ(LFKOHU: 3K\VLN, Vieweg Verlag, 1993, ISBN 3-528-04933-2 +DQV-3DXV: 3K\VLN, Hanser Verlag, 1995, ISBN 3-446-17371-4 .ODXV:HOWQHU: 0DWKHPDWLNIU3K\VLNHU, Vieweg Verlag (nur noch als CD-ROM, ISBN 3-528-06775-6, erhältlich!) 6WHSKHQ:ROIUDP: 7KH0DWKHPDWLFD%RRN, Cambridge University Press, 1999, ISBN 0-521-64314-7 Mechanik 5.nb Mechanik fester Körper (5) 'UHKEHZHJXQJHQ Unter dem Aspekt der Dynamik haben wir bisher ausschliesslich sogenannte translatorische Bewegungen betrachtet. Wir betrachten nun die Drehbewegungen (Rotation) etwas genauer unter dem Aspekt der Kräfte, die wirken und den daraus folgenden Definitionen für Arbeit, Leistung, Energie und Impuls. Å 'UHKPRPHQW$UEHLWXQG/HLVWXQJ é 'UHKPRPHQW Betrachten wir zunächst als einfaches Beispiel die Dynamik (Kräfteverhältnisse) bei einer einfachen Balkenschaukel: %DONHQVFKDXNHO r1 Drehpunkt r2 F2 F1 Um ein Wegkippen der Balkenschaukel um den Drehpunkt zu verhindern müssen bei Schaukelpartnern unterschiedlichen Gewichts die Sitzabstände zum Drehpunkt so gewählt werden, dass gilt: ) 1 U1 = ) 2 U2 . Durch leichte Verlagerung des Schwerpunkts eines der beiden Schaukelpartner kommt dann die Schaukelbewegung in Gang. Eine wichtige Rolle spielt hier offenbar das Produkt aus Kraftarm UL und Kraft )L : 0L = )L UL . Man bezeichnet die Grösse 0L als 'UHKPRPHQW. Im allgemeinen Fall sind die UL und )L Vektoren. Das Drehmoment ist dann als Vektorprodukt definiert: 0L = UL ) L [1] ¸ U ist dabei der Vektor vom möglichen Drehpunkt zu dem Punkt, an dem die Kraft angreift. Mechanik 5.nb »»¸ »¸ ¸ Der Drehmomentvektor 0 steht senkrecht auf der durch U und ) aufgespannten Ebene. »»¸ Die Richtung des Drehmoments 0 (ebenso wie die der aus einer möglichen Drehung resultierenden » Winkelgeschwindigkeit w̧ ) ergibt sich aus der UHFKWHQ+DQG5HJHO gemäss der folgenden Abbildung: $EELOGXQJ Zeigen die Finger in die Richtung der (möglichen) Drehung, so weist der Daum in die Richtung des Drehmoments bzw. der Winkelgeschwindigkeit. Die folgende Abbildung zeigt verschiedene, an einem Stab angreifende Kräfte und daraus resultierende »»¸ »¸ ¸ Drehmomente. Das Tripel Drehmoment 0 , Radius U und Kraft ) (bzw. deren massgebliche Komponente »»¸ ¸ ¸ senkrecht zu U ) ist im Raum ebenso orientiert wie ein durch Daumen (0 ), Zeigefinger (U ) und Mittelfinger »¸ () ) der rechten Hand aufgespanntes, karthesisches Koordinatensystem. $EELOGXQJ Mechanik 5.nb Der Stab befindet sich im statischen Gleichgewicht (d.h. er vollführt weder eine translatorische noch eine rotierende Bewegung), wenn sowohl für die angreifenden Kräfte wie für die Drehmomente gilt: »»»»¸ »»»»¸ »»»»¸ ) + ) + ) = 0 und »»»»»¸ »»»»»¸ 0+ 0 = 0. »¸ Da ) im Drehpunkt angreift, bewirkt sie kein Drehmoment (U3 = 0). Für den Fall, dass ein resultierendes Drehmoment existiert, vollführt der Körper eine Drehbewegung (um den Schwerpunkt, wenn keine feste Drehachse vorgegeben ist). Existiert dagegen nur eine resultierende Kraft, die im Drehpunkt (Schwerpunkt) angreift, vollführt der Körper eine Translation. Wir können also zusammenfassen: -HGH%HZHJXQJHLQHVVWDUUHQ.|USHUVXQWHUGHP(LQIOXHLQHV6\VWHPVYRQ.UlIWHQNDQQ EHVFKULHEHQZHUGHQDOV - HLQH7UDQVODWLRQGHV6FKZHUSXQNWHVXQG HLQH5RWDWLRQXPGHQ6FKZHUSXQNW Die Wirkung des Drehmoments lässt sich eindrucksvoll mit Hilfe einer Garnrolle demonstrieren. Ein runder Körper vollführt auf einer schiefen Ebene eine Bewegung, die sich aus einer Translation entlang der Eben und einer Rotation um einen Drehpunkt zusammensetzen lässt. Drehmomente lassen sich beispielsweise mit Hilfe einer Torsionswaage messen (siehe Abbildung 3). Mechanik 5.nb $EELOGXQJ Es gilt: M=r·F=' ·j. * (Wir können hier die Beträge ansetzen, da Kraft und Kraftarm immer senkrecht zueinander stehen) Die Grösse ' bezeichnet man als Winkelrichtgrösse der Torsionswaage. * Nach dem bisher gesagten können wir zwischen der Translation und der Rotation folgende Analogien herstellen: 7UDQVODWLRQ 5RWDWLRQ »¸ Kraft ) in [N] »»¸ Drehmoment 0 in [Nm] »¸ Auslenkung/Weg V in [m] Winkel j in [rad] 1 Federkonstante D in @ þþþþ Pþ D 1þþþþPþþ D Winkelrichtgrösse ' in @ þþþþ rad * é $UEHLW Die Arbeit bei der Drehbewegung können wir aus der bereits aus der Translation bekannten Beziehung herleiten: W = ¾ ) ÇV = ¾ ) U Çj = ¾ 0 Çj . Verlaufen Kraftvektor und Verschiebung nicht parallel, so müssen wir die vektorielle Darstellung wählen: W = 0 ¼Çj , [2] G »¸ wobei G »j̧ nach der Beziehung »w̧ = þþþþ þþþþþ als G »j̧ = »w̧ dt definiert ist, also parallel zur Winkelgeschwindigkeit dt »w̧ verläuft (rechte Hand Regel, vergleiche oben). j Mechanik 5.nb Bei konstantem Drehmoment und für den Fall das Drehmoment und Winkelgeschwindigkeit parallel verlaufen, reduziert sich die Gleichung [2] zu W=Mj. Die Spannarbeit für eine Trosionsfeder (vgl. Abbildung 1), für die ja M=' j * gilt, folgt unmittelbar aus Gleichung [2], da das Drehmoment von Winkel abhängig ist: :V = j0 * ' 0 j Ç j = '* j0 j Çj 0 = þþþþ12 '* j2 [3] Ist ein Körper frei drehbar um eine Achse gelagert, so verrichtet ein angreifendes Drehmoment eine Beschleunigungsarbeit. Analog zur Beziehung F=ma bei der Translation gilt: M = J a. [4] bzw. in vektorieller Schreibweise. » G w̧ 0 = J þþþþ þþþþþ dt [5] G2 d Dabei ist a = þþþþ þþþþ = þþþþþþþþ 2þþ die Winkelbeschleunigung und J steht für das Äquivalent zur Masse bei der dt j w dt Translation. Man bezeichnet J als 7UlJKHLWVPRPHQW. Wir kommen darauf später noch einmal zurück. Gleichung [5] stellt die Bewegungsgleichung der Drehbewegung dar. Ein kostantes Drehmoment führt dabei zu einer gleichmässig beschleunigten Drehbewegung. Wir können daher mit Hilfe der Gleichung [5] experimentell das Trägheitsmoment eines Körpers bestimmen , indem wir beispielweise ein bekanntes Drehmoment eine Zeit Dt wirken lassen und anschliessend die dann vorliegende Winkelgeschwindigkeit messen. Integration der Gleichung [5] über die Zeitspanne Dt liefert dann (wir nehmen an, dass w und M parallel verlaufen und verwenden daher nur die Beträge): M Dt = J w [6] 0 Dt J = þþþþþþþþ þþþþ . w [7] und daher Mechanik 5.nb é /HLVWXQJ Wie bei der Translationsbewegung für die momentane Leistung gilt: »¸ »¸ dW tr 3tr = þþþþþþþþ þþþþ = ) ¼ Y dt lässt sich für die Rotation definieren: » G j̧ dWrot 3rot = þþþþþþþþ þ þþþ þ = 0 ¼ þþþþ þþþþ = 0 ¼ w dt dt [8] Å 5RWDWLRQVHQHUJLHNLQHWLVFKH(QHUJLHGHU5RWDWLRQ Für einen Massepunkt, der auf einem Kreis mit dem Radius r umläuft, kann die kinetische der Rotation aus (kin = þþþþ12þ P Y 2 und dem bereits bekannten Zusammenhang zwischen Bahngeschwindigkeit v und Winkelgeschwindigkeit w, nämlich v=wr ermittelt werden: rot (kin = þþþþ12 P Y2 = þþþþ12 P U2 w2 . [9] Die Rotationsenergie des Massepunktes ist, selbst bei konstanter Winkelgeschwindigkeit, ganz offensichtlich vom Abstand des Massepunkts vom Drehpunkt abhängig. Für ausgedehnte Körper stellt dies ein Problem dar, da wir keinen eindeutigen Abstand des Körpers vom Drehpunkt angeben können. Wir müssen daher die Rotationsenergie durch Summation über beliebig kleine Massenelemente ermitteln: rot (kin = ¿ DEL = þþþþ12þ w2 ¿ DmL UL 2 Bilden wir den Grenzwert DmL 0, so wird aus der Summe ein Integral und wir erhalten: rot (kin = þþþþ12 w2 U 2 Ç P . [10] Mit U ist immer der kürzeste Abstand des Massenelements zur Drehachse gemeint (vgl. Abbildung 4). Mechanik 5.nb $EELOGXQJ Für das Integral in Gleichung [6] führt man den Begriff des Massenträgheitsmoments J ein: -= U 2 Ç P = . U 2 r Ç 9 = r U 2 Ç [ Ç \ Ç [11] Das Massenträgheitsmoment ist ganz offensichtlich von der Wahl der Drehachse abhängig (für eine ¸ andere Drehachse ändern sich die Abstände U nach Abbildung 4 und damit das Integral nach Gleichung [9]). L Man spricht daher vom Trägheitsmoment bezüglich einer Drehachse. Die Gleichung [6] lässt sich nun wie folgt schreiben: rot (kin = þþþþ12 - w2 . [12] Diese Formulierung erinnert nun wieder an die Analogie mit der kinetischen Energie der Translation. é (QHUJLHVDW] Mit diesem Ergebnis müssen wir den Energiesatz der Mechanik erweitern, da in einem mechanischen System kinetische Energie der Translation und der Rotation vorhanden sein kann: (QHUJLHVDW]GHU0HFKDQLN rot trans DW = D(kin + DEkin + (pot . Mechanik 5.nb Die Zufuhr von Arbeit kann in einem mechanischen System die Vergrößerung sowohl der potentiellen Energie als auch der kinetischen Energien von Translation und Rotation bewirken. Analog erweitern wir den Energieerhaltungssatz der Mechanik für abgeschlossene Systeme: (QHUJLHHUKDOWXQJVVDW]GHU0HFKDQLN rot trans D(pot + D(kin + DEkin =0 oder trans rot (pot + (kin + (kin = const. é $QZHQGXQJGHV(QHUJLHVDW]HV Schauen wir uns experimentelle Konsequenzen dieses Sachverhalts an: Wettrennen auf der schiefen Ebene. Unterschiedliche Rotationskörper gleicher Masse und gleichen Aussenradius errechen beim Abrollen über die gleiche schiefe Ebene unterschiedliche Endgeschwindigkeiten! %HLVSLHOIUGLH$QZHQGXQJGHVHUZHLWHUWHQ(QHUJLHVDW]HV Ein rotationssymmetrischer Körper der Masse m rolle (ohne zu gleiten) über seinen Umfang eine schiefe Ebene hinab. Bevor er losgelassen wird besitzt er die potentielle Energie (pot = P J K. Kommt der Körper am Ende der schiefen Ebene an, besitzt er sowohl kinetische Energie der Translation als auch kinetische Energie der Rotation. Der Energieerhaltungssatz liefert: m g h = þþþþ12 P Y2 + þþþþ12 -6 w2 . [13] Da sich die Winkelgeschwindigkeit aus der Umfangsgeschwindigkeit nach der Beziehung v=wr ergibt, kann man dies in Gleichung [11] einsetzen und nach v auflösen: v= 2JK þþþþþþþþ þþþþþþþþ . 1+ þþþþ-þþþþþþ [14] P U2 Die Geschwindigkeit eines die schiefe Ebene herabrollenden Gegenstandes ist demnach offensichtlich Mechanik 5.nb geringer als die eines herabgleitenden Gegenstandes !!!!!!!!!!!! ( v = 2 J K , vgl. Mechanik 4 ! Roll- bzw. Gleitreibung werden vernachlässigt). Berechnen wir die Geschwindigkeit konkret für eine herabrollende Kugel: Das Trägheitsmoment einer homogenen Kugel der Masse m und dem Radius r beträgt (vgl. nächster Abschnitt): J = þþþþ25þ P U 2 . Nun lassen sich Translations- und Rotationsgeschwindigkeit der Kugel am Ende der schiefen Ebene aus Gleichung [11] oder [12] berechnen: Y m g h = þþþþ12 P Y2 + þþþþ12 þþþþ52 P U2 þþþþ þ U2 ï 7 þþ P Y2 . m g h = þþþþ12 P Y2 + þþþþ15 P Y2 = þþþþ 10 2 [15] Daraus folgt: 10 þþþþ þþþ J K# (bzw. w = þþþþYU þ ). v = "############### 7 !!!!!!!!!!!! Die Translationsgeschwindigkeit ist geringer als im Gleitfall ( v = 2 J K , vgl. Mechanik 4 !), da ein Teil der potentiellen Energie in kinetische Energie der Rotation umgewandelt wird! Å 0DVVHQWUlJKHLWVPRPHQW Gehen wir noch einmal kurz auf den Begriff des Trägheitsmoments ein, der bei der Rotation eine zentrale Rolle spielt. Unsere bisher allgemeinste Definition des Trägheitsmoments war: - = r U 2 Ç [ Ç \ Ç ] . [16] Dabei war zu berücksichtigen, dass U gemäß Abbildung 4 der kürzeste Abstand zwischen Massenelement und Drehachse ist. In der Definiton [14] ist implizit die Lage der Drehachse verborgen oder umgekehrt: Bei der Berechnung des Trägheitsmoments nach dieser Vorschrift muss die Lage der Drehachse explizit mit angegeben werden! Im allgemeinen Fall möchte man dies vermeiden und definiert daher das Trägheitsmoment als eine 3x3 Matrix, einen Tensor. Aus Zeitgründen können wir hier auf Einzelheiten nicht eingehen. Skizzieren wir daher hier nur einige wichtige Ideen: Eine wichtige Rolle spielt hier die Schwerpunktskoordinate, die wir bereits wie folgt definiert hatten: 1 5 V = þþþþ þþ 0 r 5 Ç P = þþþþ þþ 0 5Ç[Ç \Ç] . [17] Mechanik 5.nb »¸ »¸ Zerlegen wir den Ortsvektor 5 nach Abbildung 3 in eine Schwerpunktskomponente 5 und eine ¸ Komponente U relativ zum Schwerpunkt, so lässt sich das Trägheitsmoment um die Achse A schreiben als: V $EELOGXQJ Zu Abbildung 5: A sei der Durchstosspunkt der Drehachse durch die Zeichenebene, S der Schwerpunkt des Körpers. -$ = 5 ÇP = 5V + U 2 ÇP = 5 V ÇP + 2 5V¼ U ÇP + U U 2 = 5V M + 0 + 2 = 5V M + ÇP [18] 2 = 5V ÇP + 2 5V ¼ 2 ÇP + U U 2 2 U ÇP ÇP 2 ÇP Mechanik 5.nb Der mittlere Term ist gleich Null, da nach Abbildung 5 und Gleichung [15] gilt: » ¸ »»»»¸ ¸ ¾ U Ç P = ¾ I5 - 5 M Ç P »¸ »»»»¸ = ¾ 5 ÇP - ¾ 5 ÇP »»»»¸ »»»»¸ = 0 5 - 5 0 = 0 V V V V Wir können das Ergebnis der Gleichung [16] wie folgt interpretieren: -D = 0 5 2 V + -V [19] Man bezeichnet das Ergebnis als 6DW]YRQ6WHLQHU Das Trägheitsmoment eines Körpers um eine Achse A ist gleich dem Trägheitsmoment -V um eine zu A parallele Achse durch den Schwerpunkt zuzüglich dem Trägheitsmoment einer Punktmasse der Masse M im Schwerpunkt, die um die Achse A rotiert. é $QZHQGXQJGHV6WHLQHUVFKHQ6DW]HV]XU%HUHFKQXQJGHV7UlJKHLWVPRPHQWVHLQHU XQV\PPHWULVFKHQ+DQWHO+DPPHUZHUIHU +DPPHU M rk L A Drehachse M: Masse der Kugel UN : Radius der Kugel L: Abstand Schwerpunkt der Kugel vom Drehpunkt A Die Masse des Verbindungsseils zwischen Drehpunkt und Schwerpunkt der Kugel sei vernachlässigbar. Nach dem Satz von Steiner gilt: -+ = 5V2 0 + -6 = /2 0 + þþþþ25 0 UN 2 = 0 /2 + þþþþ25 UN 2 [20] Mechanik 5.nb Das Trägheitsmoment der unsymmetrischen Hantel lässt sich also einfach aus dem Trägheitsmoment einer Kugel ableiten! é +DXSWWUlJKHLWVDFKVHQ Jeder beliebige Körper besitzt zwei zueinander senkrechte Achsen durch den Schwerpunkt, wobei die eine zum größten und die andere zum kleinsten Trägheitsmoment gehört. Zusammen mit einer dritten Achse, die zu den beiden genannten senkrecht steht, bilden diese die Hauptträgheitsachsen des Körpers. Mittels der Tensorrechnung kann durch Angabe der Trägheitsmomente um die Hauptträgheitsachsen das Trägheitsmoment um eine beliebige Achse ermittelt werden. Beispiele: 1.: Quader $EELOGXQJ Die Seiten des Quaders seien a (1), b(3) und c(2). Die Hauptträgheitsachsen verlaufen jeweils parallel zu den Seiten durch den Schwerpunkt. Die Trägheitsmomente sind: Achse ã a: 1 -D = þþþþ þþþ 0HE2 + F2 L 12 Achse ã b: 1 -E = þþþþ þþþ 0HD2 + F2 L 12 Achse ã c: 1 -F = þþþþ þþþ 0HD2 + E2 L 12 Betrachten wir einen normalen Ziegelstein mit den Abmessungen Höhe a = 7cm Breite b = 11cm Länge c = 24cm und der Masse M = 3 kg. Die Trägheitsmomente sind: Mechanik 5.nb -D = 174.25 [kg cm2 ] -E = 156.25 [kg cm2 ] -F = 42.50 [kg cm2 ] Betrachten wir die Rotationsenergie (rot = þþ12þþ - w2 als Funktion der Winkelgeschwindigkeit für die Drehung um die verschiedenen Trägheitsachsen: 3ORWA9 þþþþ w þþþþ w þþþþ w = 8w < $[HV/DEHO 8w (URW < 3ORW6W\OH 8*UHHQ %OXH 5HG<E Erot 80 60 40 20 0.2 0.4 0.6 0.8 1 w Die Rotation des Quaders um ide Trägheitsachsen mit minimalem und maximalem Trägheitsmoment (Achse a und c) ist stabil, während die Rotation um die Achse b labil ist und (bei der hier vorliegenden Geometrie) in eine Rotation um die Achse a mit maximalem Trägheistmoment übergeht. Dies hängt damit zusammen, dass die Rotationsenergie als zweidimensionale Funktion der Winkelgeschwindigkeit und des Massenträgheitsmoments bezüglich der beiden o.g. Achsen lokale Minima aufweist. .HJHO Mechanik 5.nb $EELOGXQJ Die Abbildung 7 zeigt die Hauptträgheitsachsen eines Kegels. é %HUHFKQXQJYRQ7UlJKHLWVPRPHQWHQ +RKO]\OLQGHU'UHKXQJXPGLH=\OLQGHUDFKVH $EELOGXQJ Die Stärke der Hohlzylinderwand Dr sei sehr klein gegenüber dem Radius R. Dann kann der Faktor U 2 vor das Integral gezogen und durch 52 ersetzt werden: -+ = U2 Ç P = 52 Ç P = 0 52 9ROO]\OLQGHU'UHKXQJXPGLH=\OLQGHUDFKVH [21] Mechanik 5.nb $EELOGXQJ Wir zerlegen den Vollzylinder in beliebig kleine Hohlzylinder mit den Volumina dV = 2 p U O dr : -9 = U2 Ç P = r U2 Ç 9 = r U2 2 p U O Ç U = 2 p r O U3 Ç U [22] 5 þþ = 2 p r O þþþþ 4 4 Das Volumen des Vollzylinders ist 9Y = 2 p 52 O , seine Masse M = r 9Y so dass aus Gleichung [20] unmittelbar folgt: -9 = þþþþ12 0 52 [23] Es folgen nun tabellarisch einige wichtige Massenträgheitsmomente: .|USHU Massenpunkt 'UHKDFKVH Abstand r Hohlzylinder, Längsachse Wanddicke `r dazu senkr. Mitte Radius r, Länge l 0DVVHQWUlJKHLWVPRPHQW m U2 m U2 Pþþ I2 U 2 + þþþþþ O2 M þþþþ 4 3 Mechanik 5.nb Vollzylinder Radius r, Länge l Längsachse dazu senkr. Mitte P Uþþþþ þþþþþþþþ 2 P Uþ2þþþ + þþþþ PþþþþO2þþ þþþþþþþþ 4 12 Kugel (Radius r) Schwerpunkt 2P þþþþþþþþ þþþþ 5 Dünner Stab, Länge l senkr. Stab, Mitte Quader (Vol.=x y z) 2 2 PþþþþO þþ þþþþ 12 2 P H\ 2 ] 2 L x-Richtung, Schwerp. þþþþþþþþþþþþþþþþ þþþþþþ 12 + Å =XVDPPHQIDVVXQJ é *HJHQEHUVWHOOXQJGHUZLFKWLJVWHQ%H]LHKXQJHQGHU7UDQVODWLRQXQG5RWDWLRQ 7UDQVODWLRQ 5RWDWLRQ »¸ Kraft ) in [N] (Newton) Masse m in [kg] Drehmoment Trägheitsmoment gleichmässig »¸ »¸ beschleunigte ) = P D Bewegung » ¸ »¸ Arbeit in [J] W = ¾ ) ÇV »¸ » ¸ »¸ bei ) =const.: W = ) ¼ V »»»¸ 0 = - »a̧ »»»¸ W = ¾ 0 Ç »j̧ bei M = cont.: W = M j Spannarbeit W = þþþþ12þ ' V2 W = þþþþ12þ ' j Leistung: »¸ » 3tr = ) ¼ Y̧ »»»¸ 3rot = 0 ¼ »w̧ (NHtransL = þþþþ12þ mv2 (NHrotL = þþ12þþ - w2 kinetische Energie »»»¸ 0 in [Nm] J in [kg P2 ] * é 7UlJKHLWVPRPHQW Trägheitsmoment bezüglich einer Achse A -$ = ¾ U2 Ç P (U : senkrechter Abstand des (U : senkrechter Abstand des Massenelements dm von der Achse) Steinerscher Satz -$ = -6 + 0 562 -6 : Trägheitsmoment bezüglich Schwerpunktsachse S 56 : Abstand der Achsen A und S é 5ROOEHZHJXQJ kinetische Energie (N = (NHtransL + (NHrotL = þþþþ12þ mv2 + þþþþ12þ -0 w2 = þþþþ12þ -$ w2 M: Schwerpunktsachse A: momentane Drehachse