5. Drehimpuls, Trägheitsmoment, Rotationsenergie, starrer Körper In
Werbung

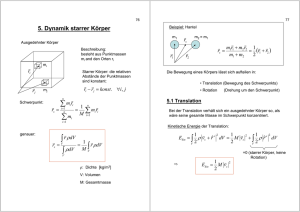
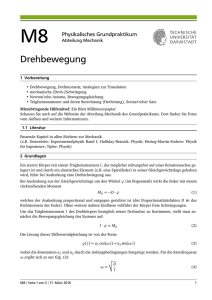
5. Drehimpuls, Trägheitsmoment, Rotationsenergie, starrer Körper In den Kapiteln 1 bis 4 haben wir nur über Punktmassen, deren Verteilungen und über mögliche Wechselwirkungen gesprochen. Hauptziel war die Beschreibung von Bewegungsvorgängen. Wir greifen hier die Analogiebetrachtungen zwischen Translation und Rotation noch einmal auf und erweitern die Tabelle in Kapitel 1.4.: Analogiebetrachtung(en) Translation Rotation Weg s Geschwindigkeit v Beschleunigung a Drehwinkel Winkelgeschwindigkeit Winkelbeschleunigung F Kraft M Drehmoment Verknüpfung: Bahngröße = Radius x Winkelgröße (Vektorprodukt!) Impuls p Drehimpuls L Masse m Kinetische Energie Trägheitsmoment J (Tensor 2. Stufe) Rotationsenergie Ekin m 2 v 2 Ekin Impulserhaltung J 2 2 Drehimpulserhaltung Punktmasse Masseverteilung starrer Festkörper 5.1. Der Drehimpuls Definition: Lrp (1) m v, p Mit p mv laut Gleichung (3), Kapitel 2.3 folgt: L r mv v r Mit Gleichung (14), Kapitel 1.3 v r lässt sich bei m const. schreiben: r L m r r r m r r Mit dem Zerlegungssatz der Vektorrechnung für doppelte Kreuzprodukte formen wir um: a b c c a b b a c L m r r r r r = 0 0 Aufgrund dessen, dass r steht, lässt sich die Beziehung wesentlich vereinfachen, es bleibt: L m r 2 So wie bei der (2) Translation galt pproportionalv , gilt bei der Rotation nun: Lproportional L . Der Proportionalitätsfaktor bekommt in Kapitel 5.2 einen eigenen Namen. 5.2 Trägheitsmoment Der Proportionalitätsfaktor in Gleichung (5.1, 2) lautet: m r 2 Er beinhaltet Angaben zur Masse des Punktes und auch dessen räumlicher Lage bezüglich des Drehzentrums. 2 Definition Trägheitsmoment einer Punktmasse J m r (3) Für Masseverteilungen bzw. ausgedehnte Körper muss über alle Masseelemente summiert werden, um das Gesamtträgheitsmoment zu erhalten: mi N J ri 2 dmi ri 2 mi (4) i 1 v Fällt die Drehachse mit der Schwerpunktachse zusammen, ist das Gesamtträgheitsmoment eines ausgedehnten Körpers: ri J S r dm 2 (5) v Diese Trägheitsmomente sind für sehr viele Körper tabelliert. Bei einer praktischen Anwendung kann man dort nachschlagen. Allerdings gelten diese Formeln wirklich nur für ausgezeichnete Geometrien Im allgemeinen Fall ist zu integrieren. Dazu ist je nach Gegebenheit dm in kartesischen, Polar- bzw. Zylinderkoordinaten oder auch in Kugelkoordinaten aufzuschreiben. Der folgenden Übersicht ist zu entnehmen, wie die Integrationsvariable in verschiedenen Koordinaten dargestellt wird sowie auch die Transformationsvorschrift für eine Richtung (die Rücktransformation ist hier nicht mit angegeben): Der zweite Einschub enthält einige konkrete Beispiele zur Berechnung von Trägheitsmomenten. Kugelkoordinaten Zylinderkoordinaten Koordinatentransformation (Hinrichtung): Volumenelement: Funktionaldeterminante: Kugel: Polarkoordinaten: Zylinder: Beispiele für die Berechnung von Trägheitsmomenten: dünner Stab (Masse , Länge , homogene Dichte ): 1.) a ) Drehachse in der Mitte und geht durch den SP; Querdrehung Da die Länge des Stabes viel größer als die Dicke und Breite ist, kann wie folgt vereinfacht werden: Die Querschnittsfläche ist konstant und wird vor das Integral gezogen: Da für die Masse des Körpers gilt: vereinfacht sich das Ergebnis zu: 1.) b) Jetzt befindet sich die Drehachse am Stabende; Querdrehung Es gilt die gleiche Vereinfachung, da es sich um den gleichen Stab handelt. Allerdings ist nun die Drehachse am Ende des Stabes, daher ändern sich die Grenzen des Integrals: Das Mit kann wieder vorgezogen werden, anschließend wird das Integral gelöst: ergibt sich schließlich: 1.) c) Berechnung für einen dünnen Stab (dünn heißt: Länge L sehr viel größer als der Durchmesser d)mit der Drehachse irgendwo auf der horizontalen x-Achse und ein zweiatomiges Molekül Massen-Trägheitsmomente für einige Geometrien Berechnung des Massenträgheitsmomentes am Beispiel des Zylinders Träghe itsmoment der homogenen Vollkugel Um das Trägheitsmoment einer massiven homogenen Kugel bezüglich einer Drehachse durch den Kugelmittelpunkt zu berechnen, wird das im Abschnitt „Berechnung“ angegebene Integral verwendet. Der Einfachheit halber soll der Kugelmittelpunkt im Ursprung eines kartesischen Koordinatensystems liegen und die Drehachse entlang der -Achse verlaufen. Um das Integral auszuwerten, empfiehlt es sich statt kartesischen lieber Kugelkoordinaten zu verwenden. Beim Übergang müssen dabei die kartesischen Koordinaten x, y, z und das Volumenelement dV durch die Kugelkoordinaten ausgedrückt werden. Einsetzen in den Ausdruck für das Trägheitsmoment liefert Hier zeigt sich der Vorteil der Kugelkoordinaten: Die Integralgrenzen hängen nicht voneinander ab. Die beiden Integrationen über r und lassen sich daher elementar ausführen. Das verbleibende Integral in kann durch partielle Integration mit gelöst werden: Für das Trägheitsmoment ergibt sich schließlich: Bei bekanntem Massenträgheitsmoment bezüglich der Schwerpunktachse JS kann bei Drehachsen parallel zur SP-Achse das Trägheitsmoment über den Satz von Steiner ermittelt werden: JA JS Die momentane Drehachse verläuft parallel zur Schwerpunktachse durch den Punkt A. S A A Mit Hilfe des Satzes von Steiner lässt sich das Trägheitsmoment JA wie folgt berechnen: J A J S ms 2 (6) s: Abstand zwischen den beiden Achsen. Verläuft die Drehachse beliebig durch den Körper, hilft nur die Integration. 5.3. Rotationsenergie Die kinetische Energie bei der Translation war: Wkin Ekin Ekin m 2 v 2 Wir nutzen jetzt die bereits gefundenen Analogiebetrachtungen aus: m J v Damit folgt: ERot J 2 2 (7) Bis hierher am 28.01.2016, Ende der 14. Vorlesung 5.4. Starrer Körper Ein starrer Körper (SK) ist nichts anderes als eine „steife“ Massenverteilung. Es werden Punktmassen aneinandergefügt, die gegenseitig nicht verschiebbar, also starr sind. Er hat 6 Freiheitsgrade x, y, z, also 3 für die Translation und , , für die Rotation. 5.5. Die Bewegungsgleichung Nach dem 2. Newtonschen Axiom gilt: F ma Unter Ausnutzung der Analogiebetrachtungen: F M ; m J a folgt sofort M J (8) In Worten: Drehmoment = Trägheitsmoment x Winkelbeschleunigung J: mathematisch ein Tensor (3*3)-Matrix! 5.6. Der Energieerhaltungssatz (EES) der Mechanik für die Drehbewegung Experiment: Pohl’sche Rollen h JS v h 0 Zustand 1: E pot m g h (oben nur potentielle Energie) Zustand 2: Ekin ERot m 2 JS 2 v 2 2 (9) (unten nur kinetische Energie) v : Geschwindigkeit der Translationsbewegung des SP Die kinetische Energie im Zustand 2 (unten) setzt sich zusammen aus der Translation des Schwerpunktes und der Rotation des Zylinders um seine Mittelpunktachse. Nimmt man die momentane Achse, die entlang der Mantellinie verläuft, also direkt am Berührungspunkt zwischen Zylinder und geneigter Ebene, nimmt der EES mit Hilfe des Steinerschen Satzes eine einfachere Form an. mg h JA 2 2 (10) Das ist für viele praktische Rechenübungen wesentlich angenehmer. 5.7. Der Drehimpulserhaltungssatz Experiment: Drehschemel + Hanteln Nach Gleichung (2), Kapitel 5.1 gilt: L mr 2 d dt L mr 2 J M Gleichung (5), Kapitel 2.3 Wirken keine äußeren Momente auf das abgeschlossene System, gilt M 0 und damit L const. Ansonsten ergibt sich der Drehimpuls L als Momentenstoß: t L Mdt 0 Anwendungen: Kreisel (11) M L