Rotation starrer Körper
Werbung

Rotation starrer Körper
Der starre Körper
Eine Menge von Massepunkten, die fest miteinander verbunden sind, wird als starrer Körper
bezeichnet.
Dieses Modell wird verwendet, wenn die Beschreibung der Drehbewegung mit dem Modell des
Massepunktes schlecht oder unmöglich ist.
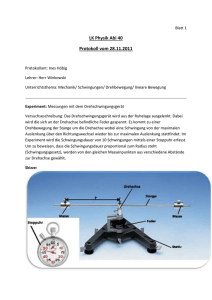
Drehbewegung eines starren Körpers:
ω=
dϕ
dt
mit ϕ =
b
r
ϕ ... Drehwinkel
r ... Abstand vom Drehpunkt
t ... Zeit
b ... Bogenlänge
ω ... Winkelgeschwindigkeit
ϕ und ω sind für alle Punkte des starren
Körpers gleich.
Die Winkelgeschwindigkeit ist die erste
Ableitung des Drehwinkels nach der Zeit.
gleichförmige Drehbewegung:
ϕ
ω=
t
beschleunigte Drehbewegung:
dω
d2 ϕ
α= 2
dt
dt
Die Winkelbeschleunigung ist die erste Ableitung der Geschwindigkeit nach der Zeit.
Die Winkelbeschleunigung ist die zweite Ableitung des Drehwinkels nach der Zeit.
α=
gleichmäßig beschleunigte Drehbewegung
α=
ω
t
ω0, t0 = 0
Systematisierung:
Translation
Rotation
Zusammenhang
s
ϕ
s
r
v
ω=
r
a
α=
r
v=
a=
ds
dt
dv d 2 s
=
dt dt 2
ω=
α=
dϕ
dt
dω d 2 ϕ
= 2
dt
dt
ϕ=
Rotationsenergie
Schwungradauto, Jo-Jo, Maxwell’sches Rad
Wo steckt die Energie im tiefsten Punkt? Ergebnis in der Drehbewegung- Rotationsenergie
Kinetische Energie eines Massepunktes
E kin =
m 2 m 2 2
v = ω r =
2
2
1 2 2
ω mr
2
Rotationse nergie
14243
Rotationsenergie von i Massepunkten
∑2ω r
1
E kin =
2 2
i mi
i
=
1 2
ω
2
∑r
i
2
mi
i
Rotationsenergie eines Körpers mit unendlich vielen Massepunkten
∆V → dV mit der Masse dm
E kin =
1 2
ω
2
mit
2
∫r
∫r
2
dm
dm = J
J ... Trägheitsmoment des Körpers, analoge Größe zur Masse bei der
Translation
Analogie:
1
1
E trans = mv 2 ↔ E rot = Jω2
2
2
Zwei Formen der kinetischen Energie: Translationsenergie-Rotationsenergie
Übung
Eine Kugel rollt eine geneigte Ebene hinab.
Beschreibe die Energieumwandlungen!
Trägheitsmomente ausgewählter Körper
Massepunkt
J = mr 2
Vollzylinder
J=
1 2
mr
2
Hohlzylinder
J=
1
2
2
m(ra + ri )
2
dünnwandiger
Hohlzylinder
(ra = ri)
Kugel
J = mr 2
J=
2 2
mr
5
Übungen zum Trägheitsmoment
1.
Eine Kugel mit dem Radius r und der
Masse m rollt aus der Höhe h eine geneigte
Ebene hinab.
Berechne die Translationsgeschwindigkeit
im tiefsten Punkt!
E A = EB
m 2 J 2
v
v + ω
ω=
2
2
r
2 2
mr
2
m
v
mgh = v 2 + 5
2
2 r2
v2 v2
gh =
+
2
5
7 2
gh =
v
10
10
v=
gh
7
mgh =
J=
2 2
mr
5
Die Geschwindigkeit ist unabhängig von der Masse und vom Radius.
2.
Maxwellsches Rad
(Idealisierung als dünnwandiger Hohlzylinder)
m 2 J 2
v
v + ω
ω=
2
2
r
2
2
m
mR v
mgh = v 2 +
⋅ 2
2
2
r
2
2
v
R
gh =
+ 2 v2
2 2r
mgh =
gh =
v2
R2
(1 + 2 )
2
r
v=
2gh
1+
R2
r2
Berechnung der Geschwindigkeit für h = 40 cm, R = 5,65 cm, r = 3 mm
-1
Ergebnis: v = 0,15 ms
J = mR 2
Übung
Vollzylinder und Hohlzylinder rollen eine geneigte Ebene hinunter. Warum kommt der
Vollzylinder schneller unten an?
Übung
Eine Kugel und ein Vollzylinder rollen eine geneigte Ebene der Länge 2,0 m hinunter. Der
Neigungswinkel beträgt 30°.
Berechne die zeitliche Differenz, mit der beide unten ankommen!
Kugel:
m 2 J 2
v + ω
2
2
m 2 J 2
mgl ⋅ sin α = v + ω
2
2
mgh =
v=
ω=
v
r
ω=
J=
v
r
2 2
mr
5
2
J = mr 2
5
h = l ⋅ sin α
10gl sin α
m
= 3,74
7
s
Vollzylinder:
4gl sin 30°
m
v=
= 3,62
3
s
aus
s=
a 2
t
2
v = at
2s
v
tKugel = 1,105 s
tHohlz = 1,070 s
fo lg t
t=
∆t = 0,035 s
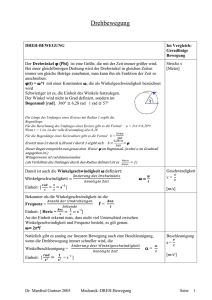
Der Satz von Steiner
J = J s + md 2
Das Trägheitsmoment eines Körpers der Masse m bezüglich einer Achse, die im Abstand d
parallel zu einer Schwerpunktachse verläuft, ist gleich der Summe aus dem
Trägheitsmoment bezüglich der Schwerpunktachse und dem Trägheitsmoment der im
Schwerpunkt S vereinigt gedachten punktförmigen Körpermasse m, die um die Drehachse
läuft.
z.B. rotierende Scheibe
S ... Schwerpunktachse
D ... Drehachse
m ... Masse der Scheibe
r ... Radius der Scheibe
d ... Abstand des Schwerpunktes von der
Drehachse
J=
ZF
1 2
mr + md 2
2
Das Trägheitsmoment eines Körpers ist abhängig von der Drehachse, der Form und von der
Masseverteilung des Körpers.
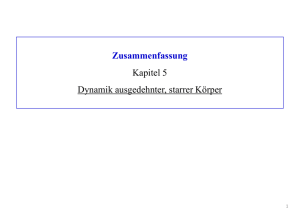
Übung zum Satz von Steiner
1.
Gegeben sind vier kleine Kugeln mit je ein
Kilogramm Masse, die durch masselose
Stäbe miteinander verbunden sind und die
Eckpunkte eines Rechtecks mit den
Seitenlängen a und b bilden. Es gilt:
a = 2,0 m
b = 4,0
d = 5,0 m
Berechne das Trägheitsmoment bei Drehung
um die Achsen I bis IV!
I:
II:
III:
b
J = 4m • ( )2 = 16kgm 2
2
a 2
J = 4m • ( ) = 4kgm 2
2
J = 4m • (
ab
a +b
2
2
)2 = 6,5kgm 2
Begründung der Länge der Seite x:
∆ABC ∆ABF
x
b
=
AC = a 2 + b 2
a AC
x
b
=
a
a2 + b2
~
x=
IV:
2.
ab
a2 + b2
a
J = 4m • ( )2 + md 2 = 104kgm 2
2
Berechne das Trägheitsmoment des Mondes bei seiner gebundenen Rotation um die Erde!
J = Js + md 2 =
2
2
2
mMrM + mMdE − M = 10 40 kgm 2
5
Bewegungsgesetze der Rotation
1. Zusammenhang zwischen Drehwinkel und Zeit bei der Kreisbewegung
Herleitung des ϕ - t - Gesetzes der Rotation
dϕ
dt
dϕ = ωdt
ω=
∫ dϕ = ∫ ωdt
∫ dϕ = ω∫ dt
ϕ = ωt + ϕ0 (gleichförmige Rotation)
Zusammenhang zwischen Drehwinkel bzw. Winkelgeschwindigkeit und Zeit bei gleichmäßig
beschleunigter Kreisbewegung
α
ϕ = t2
2
α = const., ϕ0 = 0, ω0 = 0
ω-t-Gesetz
dω
α=
dt
dω = αdt
ϕ-t-Gesetz
ω=
ϕ=
∫ αdt
ω = α ⋅ t + ω0
ϕ=
ϕ=
∫ ωdt
∫ (αt + ω)dt
α 2
t + ωt + ϕ 0
2
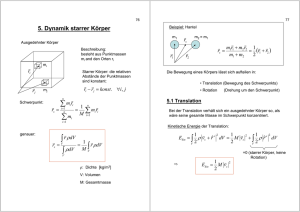
Das Drehmoment
Die Scheibe ist im Gleichgewicht, wenn gilt:
F1 ⋅ r1 = F2 ⋅ r2
(Hebelgesetz)
r
r
wenn F ⊥ r
Die Scheibe ist im Gleichgewicht, wenn gilt:
F1 · r 1 = F2 · x
F1 · r1 = F2 · r2 · sinϕ
F · r · sinϕ beschreibt das Verhalten der
Scheibe und wird Drehmoment genannt.
Definition:
M = r ⋅ F ⋅ sin ϕ (Betrag des Drehmomentes)
r
r
r
M = r ×F
(Drehmoment-Vektor)
Das Drehmoment bei der Rotation entspricht der Kraft bei der Translation.
Grundgesetz der Rotation
Beschleuni gungsarbei t = Rotationse nergie
1 2
Jω
2
1
F ⋅ r ⋅ ϕ = J(αt )2
2
M
F⋅b =
{
1
J(αt )2
2
1
1
M ⋅ αt 2 = J(αt ) 2
2
2
M⋅ ϕ =
M = J⋅α
(Analogie zu
F = m · a bei der Translation)
Der Drehimpuls
Translation:
p = m· v
Kraftstoß als zeitliche Änderung des Impulses:
dp
dt
Drehmoment als zeitliche Änderung des
Drehimpulses:
dL
M=
dt
F=
L = J⋅ω
Rotation:
[L] = kgm
2
s
r
vektoriell:
r
L = J⋅ω
Drehimpulserhaltungssatz:
Starrer Körper:
Wirkt auf einen starren Körper kein äußeres Drehmoment, so ist der Drehimpuls bezüglich
einer festen Achse konstant.
L = J · ω = const.
(Trägheitsgesetz der Rotation)
allgemein:
Der Gesamtdrehimpuls eines abgeschlossenen Systems ist konstant. Abgeschlossen ist ein
System, wenn kein äußeres Drehmoment wirkt.
Beispiele für das Wirken des Drehimpulserhaltungssatzes:
- Planetenbewegung um die Sonne
- Hula-Hup-Reifen
- Teller jonglieren
- Fahrradfahren
- Diskus
- Pirouette beim Eiskunstlaufen
- Salto beim Turnen
- fallende Katze
Drehschemelversuche
1.
- Person beschleunigt das Rad
- Person und Rad drehen sich mit
entgegengesetztem Drehimpuls
Lges = 0
2.
- drehendes Rad wird der ruhendes Person
übergeben
- Person bremst Rad ab
- Person dreht sich mit gleichem Drehimpuls
wie das Rad vorher
3.
- drehendes Rad wird der ruhendes Person
übergeben
- Person dreht die Achse um 90° nach vorn
- Person dreht sich mit dem gleichen
Drehimpuls wie das Rad vorher
4.
- Person dreht das Rad nach unten
- Person dreht sich mit doppeltem Drehimpuls
wie das Rad vorher
5.
- Radachse beim Übergeben horizontal
- Anfangskomponente in Achsenrichtung = 0
6.
- drehende Person mit nach außen
gestreckten Hanteln zieht die Arme an den
Körper
- ω nimmt zu, weil J abnimmt
7.
- drehende Person mit Hanteln am Körper
streckt die Arme vom Körper weg
- ω nimmt ab, weil J zunimmt
Der Kreisel
Warum kippen die Kreisel nicht um?
Wie funktioniert ein Kreiselkompass?
r
r
r
dL
dp
M=
ana log F =
(Kraftstoß )
dt
dt
r
r
r
dL liegt in Richtung von M .
r
r
r
M = r ×F
r
r
r
M steht senkrecht auf der von r undF
aufgespannten Ebene.
Der Kreisel weicht seitlich aus, die Drehachse
vollführt eine Drehbewegung (Präzession).
⇒
außerdem tritt noch eine Nickbewegung während
der Präzession auf (Nutation).
Drehschwingungen
Horizontalfederschwinger
Drehschwinger
rücktreibende Kraft:
rücktreibendes Moment:
F=-D·s
M=-D·ϕ
D … Federkonstante
Schwingungsdauer:
T = 2π
m
k
T = 2π
J
D
D ... Winkelrichtgröße