winkelgeschwindigkeit ist die
Werbung

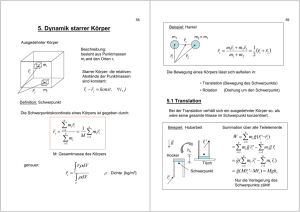
76 5. Dynamik starrer Körper 77 Beispiel: Hantel m1 Ausgedehnter Körper Beschreibung: besteht aus Punktmassen mi and den Orten ri r1 rs m2 = m1 m1r1 + m2 r2 1 rs = = (r1 + r2 ) 2 m1 + m2 r2 mi ri Starrer Körper: die relativen Abstände der Punktmassen sind konstant: rj Die Bewegung eines Körpers lässt sich aufteilen in: • Translation (Bewegung des Schwerpunkts) ri − rj = konst . ∀i, j mj n Schwerpunkt: rs = ∑ mi ri i =1 n ∑ mi • Rotation (Drehung um den Schwerpunkt) 5.1 Translation = 1 M n ∑ mi ri Bei der Translation verhält sich ein ausgedehnter Körper so, als wäre seine gesamte Masse im Schwerpunkt konzentriert. i =1 i =1 Kinetische Energie der Translation: genauer: r ∫ ρdV rs = V ∫ ρdV = 1 2 1 1 2 2 Ekin = ∫ ρ vs + rɺ s dV = M vs + ∫ ρ rɺ s dV 2 2 2 V V 1 r ρ dV M V∫ =0 (starrer Körper, keine Rotation) V ρ: Dichte [kg/m3] V: Volumen M: Gesamtmasse ⇒ 1 Ekin = M vs 2 2 78 Impuls der Translation: 5.2 Rotation ɺ p = ∫ ρ rdV = ∫ ρ (vs + rɺ s ) dV = vs ∫ ρ dV + ∫ ρ rɺ s dV V V V Vektorielle Beschreibung der Rotation um den Schwerpunkt V p = Mvs ⇒ 79 =0 r⊥ Potentielle Energie im Schwerefeld: E pot = ∫ ρ ghdV = ∫ ρ rgez dV = gez ∫ ρ rdV = gez Mrs V V V E pot = Mghs ⇒ Bahngeschwindigkeit: ω Die potentielle Energie hängt nur von der vertikalen Lage des Schwerpunkts ab! (⇒ der Schwerpunkt ist immer bestrebt, den tiefstmöglichen Punkt einzunehmen) α rs v =ω×rs v Betrag: v = r s ω sin α = r⊥ω Schwerpunkt r⊥ : Abstand zur Rotationsachse Kinetische Energie der Rotation Punktmasse auf Kreisbahn: 1 1 Ekin = mv 2 = mr⊥ 2 ω 2 2 2 J Beispiel: Hubarbeit Starrer ausgedehnter Körper: g r' hs Hocker Tisch r Schwerpunkt Für die potenteille Energie ist die Drehung des Hockers unerheblich; nur die Verlagerung des Schwerpunkts hs zählt! 1 2 1 2 Ekin = ∫ ρ v dV = ∫ ρ ω × r s dV 2 2 V V 1 1 1 = ∫ ρ ( r⊥ω ) 2 dV = ω 2 ∫ ρ r⊥ 2 dV = J ω 2 2 2 V 2 V J 80 81 Definition: Trägheitsmoment Masse des gesamten Zylinders: J = ∫ ρ r⊥ dV 2 V r0 ρ : Dichte M = ∫ ρ dV = ∫ ρ 2πr⊥ Ldr⊥ = ρπ r02 L r⊥ : Abstand zur V Rotationsachse 0 L Damit ist das Trägheitsmoment: r0 Masse des Zylinders: Beispiel: Hohlzylinder J = ∫ ρr dV = ∫ ρr⊥2 2πr⊥ Ldr⊥ 2 ⊥ M = ∫ ρ dV =ρV ≈ 2π r0 Ld r0 V r0 Trägheitsmoment: Wanddicke d J = ∫ ρ r⊥2 dV ≈ ∫ ρ r02 dV L V = ρr ∫ dV = ρ r V 2 0 V Drehachse J = r02 M 1 1 = 2πρL ∫ r⊥3dr⊥ = 2πρL r04 = Mr02 4 2 0 1 J = r02 M 2 V 2 0 0 r0 V Das Trägheitsmoment eines massiven Zylinders ist so groß wie das eines dünnwandigen Hohlszylinders mit gleichem Radius und halber Masse! J = ∫ ρ r⊥2 dV Beispiel: massive Kugel V r0 Beispiel: massiver Zylinder = ∫ ρ r 2π r⊥ 2 r02 − r⊥2 dr⊥ 2 ⊥ Zur Berechnung von J wird der Zylinder in Hohlzylinder mit Radius r⊥, Wanddicke dr⊥ und Länge L aufgeteilt. Volumen der Hohlzylinder: dV = 2πr⊥ Ldr⊥ V = ∫ dV = ∫ 2πr⊥ Ldr⊥ = π r02 L V 0 r0 r0 Volumen des gesamten Zylinders: r0 0 r⊥ 2 r02 − r⊥2 = 4πρ ∫ r⊥3 r02 − r⊥2 dr⊥ 0 = 4πρ 2 5 2 2 4π 3 r0 = r0 ρ r0 15 5 3 82 2 J = r02 M 5 Damit: 83 Vergleiche mit gleichförmiger Beschleunigung: Das Trägheitsmoment einer massiven Kugel ist so groß wie das eines dünnwandigen Hohlszylinders mit gleichem Radius und 2/5 der Masse! 1 2 v2 s = at = 2 2a ⇒ Experiment: rollende Körper auf schiefer Ebene s M ∆h Körper rollt: Translation und Rotation! Zylinder, Kugel, Radius r0 v ω= r0 v Kreisfrequenz: α Kinetische Energie: M J M J v 1 J = v2 + ω 2 = v2 + = M + 2 v2 r0 2 2 2 2 r0 2 Mit wird dies zu ⇒ Mr02 a= sin α g Mr02 + J J = γ Mr02 a= v = 2as Beschleunigung eines rollenden Körpers auf der schiefen Ebene Hohlzylinder: Vollzylinder: Kugel: γ =1 γ =1/ 2 γ =2/5 1 sin α g 1+ γ 2 Ekin Der Körper sei anfänglich in Ruhe; nach Zurücklegen des Wegs ∆h sin α = − ∆ E pot s= gilt für die Energien: Ekin 1 J 2 M + v = Mg ∆h = Mg sin α s 2 r02 2 Mr02 J v= g sin α s ⇒ Mr02 + J Die Beschleunigung hängt nicht von der Masse oder dem Radius ab, sondern nur von der radialen Masseverteilung! Verhältnis zurückgelegter Strecken: 1 a t2 1 + γ VZ 3 sHZ 2 HZ = = = sVZ 1 a t 2 1 + γ HZ 4 HZ 2 sVZ 1 + γ K 14 = = sK 1 + γ VZ 15 84 85 Beispiel: Garnrolle 5.3 Drehmoment T = r ×F Betrachten Balken mit Gewichten l1 l2 r Im Gleichgewicht gilt: F1l1 = F2l2 F2 F1 (Hebelgesetz: Hebelkraft mal Hebellänge ist konstant) Faden l1⊥ β l1 F1 Es zählt die Hebellänge senkrecht zur Kraft l2 ⊥ F l2 F2 T = r ×F r F1l1⊥ = F2l2⊥ α zeigt in die Papierebene: Rolle rollt nach rechts T momentane Drehachse Faden Genauer: F zeigt aus der Papierebene: Rolle rollt nach links T F1l1 sin β = F2l2 sin α Faden vektoriell: F r l1 × F1 = l2 × F2 Grenzfall: T =r×F =0 Es wirkt kein Drehmoment! Die Rolle kann nur rutschend gezogen werden Definition: Drehmoment T = r ×F r in Bezug auf den Drehpunkt Einheit: [Nm] Ein auf einen Körper wirkendes Drehmoment führt zur Rotation. Beispiel: stabiler Stand Klotz g Schwerpunkt Stabiles Gleichgewicht bedeutet: eine kleine Auslenkung erzeugt eine Gegenkraft (bzw. ein Gegendrehmoment) 86 87 5.4 Winkelbeschleunigung g r Fg T Drehachse T T = r ×F Analog gilt bei der Rotation (um eine feste Drehachse) 1 J Winkelbeschleunigung ωɺ = ϕɺɺ = T dreht daher den Klotz zurück in die Senkrechte r Fg g Die Gewichtskraft greift am Schwerpunkt an; das Drehmoment 1 a = ɺɺ r= F m Bei der Translation gilt: 1 J φɺɺ = T Beträge: Drehachse Außer bei großen Auslenkungen: g r Fg Der Schwerpunkt liegt jenseits der Drehachse; das Drehmoment verstärkt das Kippen. Beispiel: betrachten Punktmasse auf Kreisbahn F m T r Ein Körper steht stabil, wenn sich sein Schwerpunkt über seiner Standfläche befindet! Gleichgewichte: Änderung der Bahngeschwindigkeit: labil: Auslenkung verstärkt auslenkende Kraft indifferent: Keine Kraft bei Auslenkung Mit ϕ stabil: Auslenkung erzeugt Gegenkraft ⇒ vɺ = a = v = rω = rϕɺ rϕɺɺ = ϕɺɺ = 1 F m 1 F m 1 r T F= 2 F= rm r m J : 88 89 5.6 Vergleich Translation/Rotation 5.5 Drehimpuls p = mv pɺ = F Bei der Translation gilt: Impuls Impulsänderung Analog gilt bei der Rotation (um eine feste Drehachse) l = Jω lɺ = T Drehimpuls Translation Rotation Orts-Koordinate r Geschwindigkeit v = rɺ Masse Kraft Impuls Drehimpulsänderung m F p = mv = mrɺ t p = p0 + ∫ Fdt ϕ Winkel ɺ ω =φ Winkelgeschw. Trägheitsmoment Drehmoment Drehimpuls J T l = Jω = Jϕɺ t l = l0 + ∫ Tdt 0 Beispiel: betrachten Punktmasse auf Kreisbahn F Es gilt m r ϕ ⇒ T ϕɺɺ = ωɺ = J J ωɺ = lɺ = T Vektoriell geschrieben und über die Zeit integriert: 0 Nachrechnen (Beträge): Arbeit M 2 vs 2 W = ∫ Fds E= Beschleunigung t l = l0 + ∫ Tdt Weiterhin gilt hier: kin. Energie l = r × p = m r ×v l = rp = rmv = rmrω = J ω F a= M (φ ) 0 kin. Energie Arbeit J 2 ω 2 W = ∫ T dϕ E= Winkelbeschleunigung ɺɺ T ϕ= J 90 Die Schwingungsfrequenz eines Fadenpendels im Fall kleiner Auslenkung ist damit: Beispiel: Fadenpendel ϕ l also ω= T = r ×F g Das Drehmoment ist sin ϕ ≈ ϕ T = −lFgϕ Für kleine ϕ gilt: und damit Das Trägheitsmoment ist Die Frequenz hängt nur von der Pendellänge ab, nicht von der Masse! Zahlenwerte: J = ml 2 Sekundenpendel (f = 1/s) l = 0.248 m 2-Sekundenpendel (f = 0.5 1/s) l = 0.99 m Pendel lassen sich zur Messung von g einsetzen! Für die Winkelbeschleunigung gilt damit: ϕɺɺ = g l T = − rFg sin ϕ = −lFg sin ϕ m Fg 91 T − lmg g = ϕ = − ϕ J ml 2 l 5.5 Steinerscher Satz Lösungsansatz für diese Differentialgleichung: Bei Rotation eines Körpers um eine Achse, die nicht durch den Schwerpunkt führt, gilt für das Trägheitsmoment: ϕ (t ) = ϕ0 sin(ωt ) g l ϕ0ω 2 (− sin(ωt )) = − ϕ0 sin(ωt ) Einsetzen: ⇒ g ω = l 2 ⇒ ω= Drehachse g l J = J s + Ma 2 Js : Trägheitsmoment um Schwerpunkt a Unter dieser Bedingung erfüllt das angenommene ϕ(t) die Differentialgleichung. M : Gesamtmasse a : Abstand des Schwerpunkts zur Achse Schwerpunkt 92 93 Trägheitsmoment um den Drehpunkt: Begrüdung über die kinetische Energie: 2 l 4 l J = Js + M = M 2 3 2 1 1 Ekin = J ω 2 = ( J s + Ma 2 ) ω 2 2 2 Differentialgleichung: 1 1 1 1 = J sω 2 + M (aω ) 2 = J sω 2 + Mvs 2 2 2 2 2 kin. Energie der Rotation um Schwerpkt. l T 2 ϕ = −3 gϕ ϕɺɺ = = J 4 l 2 2l M 3 2 − Mg kin. Energie der Translation des Schwerpkts. Die Aufteilung des Trägheitmoments entspricht der Auftelung der kinetischen Energie in Rotation und Translation. ω= ⇒ Zahlenwert: Beispiel: Stabpendel Drehpunkt Trägheitsmoment des Stabs um seinen Schwerpunkt: l ϕ m/2 l/2 0 0 J s = 2 ∫ r 2 dm = 2 ∫ r 2 ρAdr Schwerpunkt Fg 2 l = 1m 3g 2l ⇒ ω = 3.9 1/s; f = 0.6 1/s 5.8 Drehimpulserhaltung In einem System, auf das kein äußeres Drehmoment wirkt, ist der Gesamtdrehimpuls eine Erhaltungsgröße. n l ges = ∑ li = konstant i =1 mit Dichte ρ und Querschnittsfläche A M l 1 l3 1 l J s = 2 ρA = ρAl = 38 3 2 3 2 2 2 Beispiel: Rotation mit veränderlichem J ω m r J = 2mr 2 L = Jω 94 2. Fall: ω J ' = 2mr ' m 2 lD = 0 L' = J 'ω ' = L = Jω r‘ ⇒ lR lD Rad J r2 ω' = ω = 2 ω J' r' Eine Verringerung des Trägheitsmoments beschleunigt die Rotation! 95 lges = lR lR ⇒ Drehachse (Drehstuhl ruht) Umkehrung des Rads führt zur Drehung des Stuhls mit doppeltem Drehimpuls! Kinetische Energie: J ' 2 mr '2 r 4 2 r 2 mr 2 2 ω = 2 ω E' = ω' = 2 2 r '4 r' 2 5.9 Kreisel Ein Kreisel behält seine Ausrichtung bei, wenn keine Drehmomente auf ihn wirken (Kreiselkompass!). Wirkt ein Drehmoment auf ihn, weicht er „senkrecht dazu“ aus. Die kinetische Energie erhöht sich (die Verringerung des Trägheitsmoments erfordert Arbeit!). Genauer: der Drehimpuls ist eine vektorielle Größe Beispiel: waagerechter Kreisel mit Zusatz-Gewicht n lges = ∑ li i =1 r Beispiel: System aus Drehstuhl und Rad lD lR Rad Drehachse 1. Fall: lges = 0 lD lR ⇒ m Fg ω Drehmoment: l T = r × Fg (T ⊥ l ) T = T = rmg In der Zeit dt erzeugt dies einen Drehimpuls von: dl = Tdt Umkehrung des Rads dreht die Drehrichtung des Stuhls! ( dl ⊥ l ) 96 97 Von oben betrachtet: der zusätzliche Drehimpuls erzeugt eine Rotation von l dϕ l l' Winkel: dl dl T dt dϕ = arctan = arctan l l dϕ l⊥ ' Winkeländerung: l⊥ dϕ = dl l Die Winkelgeschwindigkeit ist dann: ω= dφ T rmg = = dt l l Beispiel: schräger Kreisel im Schwerefeld Masse m h Drehmoment: g ω= Schwerpunkt dϕ hmg = dt l Präzessionsgeschwindigkeit schräger Kreisel Die Präzessionsgeschwindigkeit hängt nicht von dem Winkel des Kreisels ab, sondern nur von seiner Masse und seinem Drehimpuls! 5.10 Freie Drehung Das Trägheitsmoment J eines Körpers hängt von der Richtung von ω ab. Im allgemeinen Fall ist J eine Matrix (der Trägheitstensor): J11 J = J 21 J 31 T = r × Fg T = hmg sin α Änderung des Drehimpulses in der Zeit dt: dl = Tdt α hmg sin α dt l sin α (Präzessionsfrequenz) Der Kreisel wird durch das Zusatzgewicht nicht aus der Waagerechten heraus gekippt, sondern präzediert in einer waagerechten Ebene. Die Präzessionsgeschwindigkeit ist umso größer, je größer das ausgeübte Drehmoment und je kleiner der Drehimpuls des Kreisels ist. l l⊥ = Winkelgeschwindigkeit: Für dt→0 wird dies: T dt mgr dϕ = = dt l l T dt J12 J 22 J 32 und es gilt: ( dl ⊥ l ) l = Jω J13 J 23 J 33 98 Das Trägheitsmoment für eine bestimmte Drehachse ist also: 99 Hauptträgheitsachsen („freie Achsen“) J D = JeD eD : Einheitsvektor (Länge 1) in Richtung der Drehachse J3 Schwerpunkt Die Matrix J ist diagonalisierbar, d.h. hat drei Eigenvektoren ⇒ jeder Körper hat drei Achsen (Hauptträgheitsachsen), für welche gilt: l = Jωi = J iωi (d.h. der Drehimpuls liegt parallel zur Drehachse) Dies sind die Achsen des minimalen und des maximalen Trägheitsmoments, sowie ein dritte zu beiden senkrechte Achse. Bem: im Allgemeinen ist der Drehimpuls nicht parallel zur Drehachse! ω2 l1 ω = ω1 + ω2 l l2 Nur für ist ω1 J1 = J 2 l1 = l2 ! Da der Drehimpuls bei der freien Rotation erhalten bleibt, muss sich also die Richtung der Drehachse ständig ändern! (Nutation) Jmax Jeder Körper hat drei freie Achsen. Das richtungsabhängige Trägheitsmoment eines beliebigen Körpers läßt sich durch einen „Trägheitsellipsoid“ darstellen. Jmin Auftragung der inversen Wurzel des Trägheitsmoments (das Quadrat des Abstands der Fläche zum Ursprung ist der Kehrwert von J): freie Achsen 1/ J Trägheitsellipsoid (die freien Achsen des Körpers sind die Achsen des Ellipsoids) Es gilt: stabile Rotation ist nur möglich um die Achsen mit maximalem oder minimalem J! Grund: der Abstand der Tangentialfläche auf dem Ellipsoid am Durchstoßpunkt der Drehachse zum Mittelpunkt ist eine Konstante der Bewegung. Tangentialflächen mit maximalem und minimalem Abstand gibt es jeweils nur eine (bei nichtentarteten Eigenwerten Ji), für Abstände dazwischen gibt es unendlich viele Flächen, d.h. der Durchstoßpunkt der Drehachse kann auf dem Ellipsoid wandern.