die kinetische energie senkrecht
Werbung

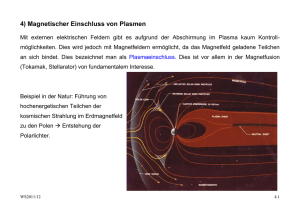
8) Magnetischer Einschluss von Plasmen Mit externen elektrischen Feldern gibt es aufgrund der Abschirmung im Plasma kaum Kontrollmöglichkeiten. Dies wird jedoch mit Magnetfeldern ermöglicht, da das Magnetfeld geladene Teilchen an sich bindet. Dies bezeichnet man als Plasmaeinschluss. Dies ist vor allem in der Magnetfusion (Tokamak, Stellarator) von fundamentalem Interesse. Beispiel in der Natur: Führung von hochenergetischen Teilchen der kosmischen Strahlung im Erdmagnetfeld zu den Polen Æ Entstehung der Polarlichter. Zunächst betrachten wir die Bewegung von Einzelteilchen im Magnetfeld. Berücksichtigen wir kollektive Effekte, dann müssen diese durch die Magnetohydrodynamik (MHD) beschrieben werden. Lorentzkraft: r& r r r m ⋅ v = FL = q ⋅ v × B r r r FL ⊥ B ist m ⋅ v&|| = 0 , Wegen d.h. das Magnetfeld hat keinen Einfluss auf die Bewegung parallel zum Magnetfeld. Außerdem ändert sich nur die Richtung von der Geschwindigkeit senkrecht zum Magnetfeld, die kinetische Energie des Teilchens ändert sich dabei nicht (Kreisbahn). v⊥2 m ⋅ = mω c2 r = q ⋅ v⊥ ⋅ B = qω c r ⋅ B r O. Kester Æ ωc = q B m Zyklotronfrequenz 71 ω ce [Hz ] = 1.76 ⋅1011 ⋅ B[T ] , ω ci = Radius auf Orbit: r= me ω ce , mi m ⋅ v⊥ q⋅B • Gyrationsbewegung der Elektronen Æ Plasmadiagnostik • Einstrahlen einer elektromagnetischen Welle mit ω = ωce Æ Plasma heizen Mit 1 2 m ⋅ v⊥2 = kT (2 Freiheitsgrade senkrecht zu B) folgt der Lamorradius rL zu rL = T [eV ] m ⋅ v⊥ 2mkT [m] = = 3.4 ⋅10−6 ⋅ e q⋅B qB B[T ] Beispiel: Te = 1 eV, B = 1 T → rL = 3.4 µm O. Kester 72 Was ist jedoch, wenn r& r r r m⋅v = F + q⋅v × B mit einer zusätzlichen Kraft F > keine geschlossenen Kreisbahnen mehr Für räumlich und zeitlich konstantes B und F Æ guiding center-Ansatz Bewegung des Führungszentrums r r r r r r m⋅v v × B m r r rc = r + rg , rg = v×B ⋅ = 2 q⋅B v⋅B q⋅B Die Geschwindigkeit des Führungszentrums ist r r r& r& r& r r r r m r& r r 1 vc = rc = r + rg = v + ⋅v × B = v + ( F + q ⋅ v × B) × B 2 2 q⋅B q⋅B mit r r r r r r r r ( v × B ) × B = (v ⋅ B ) B − B 2 v = − B 2 v⊥ O. Kester folgt für die Geschwindigkeit des Führungszentrums 73 r r r r F ×B vc = v|| + q ⋅ B2 mit r r& mv|| = F|| Der zweite Term ist die Driftgeschwindigkeit, die nicht beschleunigt und senkrecht zu B und F| steht. Beispiele: Æ 1.) elektrisches Feld r r F = q⋅E Æ E x B –Drift v r r E×B vD = B2 Die Driftgeschwindigkeit ist ladungsunabhängig! O. Kester 74 2.) r r r ∇ B-Drift, wenn B = f ( x, t ) Æ Krümmungsdrift r r ∇⋅ B = 0 Aufgrund von bedingt ein Gradient in B eine Krümmung der Feldlinien. Dies bewirkt die r r v|| r F = m ⋅ ⋅ rˆc Zentrifugalkraft Rc . r 2 r r ⋅ m v r rˆc × B || ⋅ vD = Rc q ⋅ B2 r rˆ rˆ rc dT ∇B = =− Nun gilt: R ds B c Die Zentrifugalkraft zeigt in Richtung r − ∇B und damit r 2 r r ⋅ m v r || vD = − ⋅ ∇B × B 3 q⋅B Beispiel: toroidales Magnetfeld O. Kester 75 Adiabatische Invarianz des magnetischen Moments Ein geladenes Teilchen bildet einen Kreisstrom im Magnetfeld I =q v 2π ⋅ r =q ω 2π magnetisches Dipolmoment: 2 r r r q 2 2 r 1 µ m = I ⋅ ∫ dF ⋅ n F = I ⋅ F ⋅ n F = 2 qω c ⋅ rL ⋅ n F = B ⋅ rL ⋅ n F m 2 F r mit dem Lamorradius v m rL = ⊥ B⋅q 2 erhält man ⎛ v⊥ m ⎞ q2 m ⋅ v ⊥2 W⊥ µm = = B ⋅ ⎜⎜ ⎟⎟ = B 2m ⎝ B ⋅ q ⎠ 2B Wie ändert sich nun das magnetische Moment bei einer langsamen Drift des Führungszentrums? Mit der Gyrationsperiode Andererseits ist O. Kester dW⊥ ∆W⊥ π ⋅ q ⋅ rL dB dB ≈ = ⋅ = µm τc ω c gilt dt τc dt dt dW⊥ d dµ dB = (µm B) = B m + µm dt dt dt dt τC = 2π 76 daher gilt: dµ m = 0 , µ m = const . dt Das magnetische Moment bleibt bei einer langsamen Driftbewegung (langsam ggü. der Gyrationsbewegung) erhalten. Æ Beispiel: adiabatische Invariante magnetischer Spiegel Läuft ein Teilchen in ein Gebiet höherer Feldstärke so nimmt wegen der Konstanz des magnetischen Moments auch die kinetische Energie der Gyrationsbewegung zu. Da die Gesamtenergie der Teilchen erhalten bleiben muß, nimmt die kinetische Energie in Richtung der Magnetfeldlinien ab. Um v|| komplett abzubauen muß gelten: µ m ( Bmax − B1 ) = ∆W⊥ = W2 ⊥ − W1⊥ > W||,1 Dabei startet das Teilchen an Position 1. Position 2 bezeichnet das Magnetfeldmaximum Bmax. O. Kester 77 B2 W2 ⊥ ∆W⊥ = = 1+ B1 W1⊥ W1⊥ ⇒ B2 ∆W⊥ −1 = ≥ B1 W1⊥ W1⊥ W||,1 2 ⎛ v1|| ⎞ ⎟⎟ = (cot α )2 = ⎜⎜ ⎝ v1⊥ ⎠ Man bezeichnet B2/B1 als das Spiegelverhältnis. α v 1⊥ v 1 || Der Verlustkegel ergibt sich aus α = arcsin( Bmin ) Bmax Die obige Gleichung zeigt, dass ein magnetischer Spiegel nicht perfekt reflektiert. Vor allem Teilchen mit keiner Geschwindigkeitskomponente senkrecht zum Magnetfeld gehen verloren (da deren Winkel bezüglich der Achse kleiner als α ist. O. Kester 78 Magnetischer Einschluss findet sich im Ionenquellenbereich wie folgt wieder: • • • • Elektron Zyklotron Resonanz Ionenquelle (EZR) (resonantes Heizen von Plasmen mit HF) Einschuss von Ionen in eine Elektronenstrahl-Ionenquelle (EBIS) Multicusp-Ionenquellen Bewegung von Ionen in einer EBIS und einer Penningfalle O. Kester 79