Impuls
Werbung

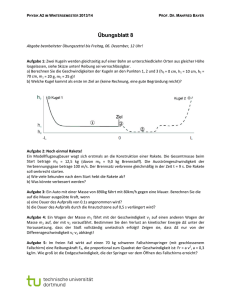
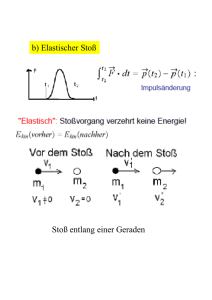
2.20 Impuls /lap5.../mewae_act_scr+02_72 2.20(Impuls)_s1.tex_16_Nov_03 ⃗ noch nicht eindeutig bestimmt: hängt Wirkung einer Kraft auf einen Körper durch Angabe der F noch von der Körpereigenschaft m ab: ⃗ ⃗ ⃗a = dv = mF Umschreiben dieser Gleichung (etwa entsprechend einer Trennung: was kommt von dt außen? was betrifft Körper?): ⃗dt F v.aussen (für m = const) neue Größe eingeführt: ⃗ p := mv⃗ △ = mdv⃗ Koerper = d m⃗v Impuls △ △ △ △ ⃗ t dt = ⃗p Kraftstoß F ⃗dt bewirkt Impulsänderung dp⃗ ⇒ ∫F ⃗ t = const: F ⃗ t = ⃗p ⇒ ⃗p t + t = ⃗p t + F ⃗ t z.B. für F ⋅ Anmerkungen: 1.) Die relativistisch korrekte Definition für den Impuls lautet ⃗ p = mv⃗ γ mit dem sogenannten v 2 − 12 ”Lorentzfaktor” γ = 1 − c 2 . Mit v → c steigt γ viel stärker an als v. d.h. eine Kraft wird dann vorwiegend dafür verwendet, um γ zu vergrößern. 2.) Widerstand gegen eine Beschleunigung ⃗ a (”Träge Masse”) und Ansprechen auf ein Gravitationsfeld (”schwere Masse”) sind also von der Geschwindigkeit v eines Körpers und damit von γ abhängig. Der Körper verhält sich so, als hätte er in der Newtonschen Mechanik die Masse m R = mγ, die man deshalb etwas unschön als die ’relativistische Masse’ des Körpers bezeichnet. Die den Körper charakterisierende Größe ist natürlich seine Ruhemasse m. Dieser Effekt wird aber erst bei Geschwindigkeiten ab einer Größenordnung von 1/10 derLichtgeschwindigkeit relevant (Bitte selbst ausrechnen: wie groß muß v sein, damit die exakte Definition des Impulses einen um 5% höheren Wert als die der Newtonschen Mechanik ergibt, d.h. bei welchem v wird γ = 1, 05? ) Zwei nützliche Beziehungen für ein System von Teilchen: ⃗p gesamt = ∑ ⃗p = ∑ i i d i dt m i⃗r = ∑ m ⃗r = d dt i i i d dt M k⃗r sp = M k⃗v sp = ⃗ p sp d.h. Der Impuls eines Körpers = Impuls seines Massenmittelpunktes (Schwerpunkts SP). ⃗ ges = F ∑ F⃗ = ∑ i d dt ⃗p i = d dt ∑ ⃗p i = d dt ⃗p sp = d dt ⃗p ges Die Änderung der Summe der Einzelimpulse = der gesamten auf das System wirkenden Kraft. insbesondere gilt für ⃗ ges = 0 F d dt ∑ ⃗p i =0 ⇒ ∑ ⃗p i = const Diese Formel stellt den wichtigen Satz von der Erhaltung des Gesamtimpulses in einem abgeschlossenen System dar: 2.21 Satz von der Erhaltung des Gesamtimpulses eines Systems: ⃗ ges = 0) ist die Summe der Einzelimpulse ⃗p i konstant (die In einem abgeschlossenen System (F ⃗ einzelnen p i können sich dabei natürlich sehr wohl ändern) zur Veranschaulichung: Ballspiel im Boot(=Kahn) = 0 : ⃗p K t o = ⃗p B t o = 0 ⃗ = ∫ F⃗tdt = △⃗p B = −△⃗p K dann: Kraftstoß K pi = 0 ∑ △⃗ ⃗p B = ⃗p B + △⃗p B = △⃗p B to o 1 ⃗v K ⃗v B = o 0 ⃗p K = ⃗p K + △⃗p K = −△⃗p B ⃗v B = 1 mB mK wegen 0 ⃗ K mB , ⃗v K = − mK⃗ K d.h. solange Ball in Luft: Ball und Kahn haben entgegengesetzte, gleichgroße Impulse. Auffangen des Balls in t 2 : ⃗p K = ⃗p K + ⃗p B = 0 2 1 1 Kraftstoß beim Auffangen des Balls (≈ Impulsübertrag ) stoppt das Boot wieder (wenn Ball nicht aufgefangen wird: Boot behält ⃗p K . In realer Welt: Reibung wandelt W = 1 ⃗p 2K 1 2m K in Wärme um ). (zu überlegen: woher kommt der Kraftstoß , der den Ball beim Auffangen abbremst? Wovon hängt die Dauer dieses Kraftstosses ab? ) ( Analoges Beispiel: Jäger schießt auf Tier. Impulse, vor / während / nach dem Flug der Kugel? ) oder: Mensch geht mit ⃗ p m auf Erde: Erde erhält −⃗ p m nach hinten Oder: Mensch springt von Erde nach oben: Nach Absprung: ⃗ pEo ⃗ △p M,E = F⃗ Grav.M,E △t = −⃗p M o ⃗p M,E t = ⃗p M,Eo + △⃗p M,E = ⃗p M,E t 0 + F⃗ g EM,ME t − t 0 in t 1 : ⃗ △p M,E in t 2 − dt = −⃗p M,Eo ⇒ ⃗p M,E t 1 = 0 ⃗p M,E t 2 ≈ −⃗p M,E t 0 ′ =t 2 ′ (also unmittelbar vor dem Aufsprung) in t 2 : ⃗ p M,E t 2 = 0 Weiteres Beispiel (→ Ergänzungen!) Aufsteigen einer Rakete: Kraftstoß nach 3. Newton’schem Axiom durch nach hinten ausströmenden Treibstoff hervorgerufen. Rakete verliert dadurch Masse. ( Die Wirkung anderer Kräfte, insbesonders Gravitation, im Weiteren nicht berücksichtigt.) System in 2 Teilsysteme zerlegt: 1.) Rakete mit Masse m R , v R t (Hülle und verbleibender Treibstoff), 2.) ausströmender Treibstoff, v Tr = const. Wegen △⃗ p ges = 0 muß △⃗ p Tr = −△⃗ p Rak sein ⃗v R = v R⃗e x ⃗v Tr = −v Tr⃗e x Rakete für hinreichend kleines dt betrachtet, in dem m R + dm R ≈ m R ≈ const gilt ⃗ R = m R dv⃗R in System, in dem Rakete zu Beginn von dt ruht: dp in diesem dt wird eine Treibstoffmenge dm Tr ,die vorher in der Rakete (und damit im gewähltem Bezugssystem) ruht, von ⃗v = 0 auf ⃗v = ⃗v Tr beschleunigt: ⃗ Tr = dm Tr⃗v Tr dp dv⃗Tr = ⃗v Tr ⃗ gesamt = 0 Wegen dp ⇒ dm Tr⃗v Tr = −m R dv⃗R Wenn ⃗e x die Flugrichtung definiert: −dm Tr ⋅ v Tr⃗e x + m R dv R⃗e x = 0 mit dm Tr = −dm R ( Zunahme des ausgestoßenen Treibstoffes ist Abnahme der Raketenmasse) dlnm R dm R v Tr R = −m R dv R ⇒ −v Tr dm mR = dv R = −v Tr dlnm R m m ∫ dv R = v R − v Ro = −v Tr lnm R − lnm Ro = −v Tr ln R = v Tr ln mRo R mR o v R t = V Ro + v Tr ln m Ro m R t m R t... in t verbleibende Masse der Rakete z.B. Endgeschwindigkeit einer Saturnrakete (ohne Gravitation) to...Start, v Ro = 0; m Ro = 2, 45.10 6 Kg davon 1, 7.10 6 Kg Treibstoff( Kerosin +Sauerstoff(flü) v Tr = 3, 1.10 3 m/s (!) ⇒ m R t End = 0, 75.10 6 Kg ≈ 3.1 ⋅ ln3.3 ≈ 3.1 ⋅ lne1 + 15 = 3.1lne + ln1.2 10 −3 ⋅ v E = 10 −3 vt = t End = 3.1ln 2.45 0.75 x2 x3 mit ln1 + x = x − 2 + 3 ... ln1.2 = ln1 + 0.2 ≈ 0.2 − 0.02 + ... ≈ 0.2 3 v E ≈ 3.11 + 0.2 ⋅ 10 = 3.1 ⋅ 1.2 ⋅ 10 3 ≈ 4.10 3 m/s ( weitere Überlegungen: t E =? Wirkung der Grav. in dieser Zeit bei senkrechtem Steigen? a) für ⃗ = const b) G ⃗ =G ⃗ ⃗r G Stoßvorgänge: Unterscheidung elastisch- unelastisch: beim elastischen Stoß bleibt die gesamte kinetische Energie als kinetische Energie erhalten, beim inelastischen Stoß wird ein Teil der kinetischen Energie der einlaufenden Teilchen beim Stoßprozess in eine andere Energieform umgewandelt (Wärme,potentielle Energie, (Anregungsenergie im Atom etc.) Lehrreiches Beispiel aus dem Alltag für inelastischen Stoß (oder: warum Physiker sich immer angurten ...): Kollision von 2 Fahrzeugen mit unterschiedlicher Masse, aber gleicher Geschwindigkeit. ⃗v 1 = −⃗v 2 , v =∣ ⃗v 1,2 ∣= 50km/h M 1 = 10t, m 2 = 1t ∙ Frage: Welche Kräfte treten in beiden Fahrzeugen beim Zusammenstoß auf? ∙ Ansatz zur Lösung: ⃗v sp des Systems von m 1 und m 2 bleibt durch den Zusammenstoß unverändert. Wenn Zusammenstoß unelastisch (d.h. Verformungsarbeit bei ’Beschleunigung’ von ⃗v 1,2 auf ⃗v sp wird nicht als W pot gespeichert, sondern in Wärme umgewandelt): m 1 und m 2 bewegen sich ⃗ 1,2 können a 1,2 und F danach mit ⃗v sp . Der Geschwindigkeitsunterschied für 1 und 2 △⃗v 1,2 und damit ⃗ dann berechnet werden. Annahme: Deformation beider Fahrzeuge beträgt zusammen 1,1 m. ∙ Methode: vom Schwerpunkt-System aus betrachtet (r⃗∗i ⃗v ∗i mit i = 1, 2 ...Ortsvektoren und ∑ ∑ Geschwindigkeit der beiden Fahrzeuge im Schwerpunktssystem (CM)) m i⃗r ∗i = 0 und i ⃗ p ∗i = 0 verwendet. Dazu müssen zunächst ⃗r ∗1,2 und ⃗v ∗1,2 aus den Werten im i Laborsystem von ⃗r 1,2 , ⃗v 1,2 und der Geschwindigkeit ⃗r sp berechnet werden. Es war: m ges⃗r sp = m i⃗r i = m 1⃗r 1 + m 2⃗r 2 i ⃗ ⃗ m r + m r ⃗r sp = 1 m1 ges 2 2 ∣ dtd ⇒ ⃗v sp = mp⃗11 ++p⃗m22 5.10 4 49 7 v = 50km/h = 3,6.10 3 ≈ 3,5 = 5 .10 ≈ 10m/s 4 3 ⃗v sp = 10 .14−103 .14 ⃗e x 11.10 v sp =∣ ⃗v sp ∣= 126 ≈ 11, 5m/s 11 im SP-System: ⃗p ∗1 = −⃗p ∗2 , aber daher auch v ∗2 > v ∗1 da m 2 < m 1 ∑ Dann im SP-System: ⃗v ∗1,2 = ⃗v 1,2 − ⃗v sp ⃗v ∗1 =∣ ⃗v 1 − ⃗v sp ∣= 14 − 11, 5 = 2, 5m/s ⃗v ∗2 =∣ ⃗v 2 − ⃗v sp =∣ −14 − 11, 5 ∣= 25, 5m/s Wo liegt der SP im Moment, wo sich die Fahrzeuge berühren (sie habe aber dann noch 1,1 m, um in SP-System zur Ruhe zu kommen )? es ist immer: s1 s2 = m2 m1 , d.h. auch die 1,1 m, über die die Fahrzeuge durch die Deformation auf ⃗v ∗1,2 = 0 verzögert werden, △s ∗ werden in diesem Verhältnis aufgeteil: △s 1∗ = mm 21 , △s ∗1 + △s ∗2 = 1, 1m 2 Nach dem Unfall bewegen sich die Fahrzeuge gemeinsam mit ⃗v ∗1,2 = 0 d.h. mit ⃗v 1 = ⃗v 2 = ⃗v sp Im SP-System: △⃗v ∗1,2 = ⃗v ∗1,2 − v ∗sp über die Strecke △s ∗1,2 ⇒ a 1 = a ∗1 = a1 1 a 2 ≈ 10 v∗ △⃗ v ∗1 2 2△s ∗1 2 a 2 = a ∗2 = 2△2 s 2 = =0 2 v ∗1 = 2△s∗ = 1 25,5 2 2 2,5 2 0,2 = 6, 25.5 ≈ 31m/s 2 ≈ 3g = 325m/s 2 ≈ 33g △v ∗ bestimmt a: schweres Auto bewegt sich langsamer in SP: schweres Auto bei gleichem v sicherer. Aber: ohne Gurten: △s ∗1,2 ≈ 1 cm (Deformation Kopf + Windschutzscheibe) a 1 = 10a 1 = 30g, a 2 = 100a 2 = 3300g Bitte überlegen: wie sieht die Bilanz aus, wenn der Stoß nicht inelastisch, sondern elastisch abläuft? ′ ′ Stöße zwischen zwei Teilchen: Bes. Bedeutung in Atom- und Kernphysik: Streuversuche: ein Teilchen durchläuft das Potential des anderen. Aus der beobachteten Ablenkung zieht man Rückschlüsse über Art und räumliche Verteilung des Potentials. Zufolge fundamentaler Gesetze der Atomphysik (Heisenberg’ sche Unschärferelation, Dualismus, de-Broglie-Beziehung ) können umso feinere Strukturen untersucht werden, je höher die Gesamtenergie beim Zusammenstoß ist (’Hochenergiephysik’≡Physik der Elementarteilchen). Unabhängig davon, was bei einer Wechselwirkung zwischen 2 Teilchen im einzelnen geschieht, gilt immer Energie- und Impulserhaltung: (in der Praxis werden allerdings relativistische Formeln benötigt!) 1. Zentraler elast. Stoß zweier Kugeln (im Labor-System mit v⃗2 = 0): Zentral= eindimensional, v⃗1 ist auf Schwerpunkt von m 2 gerichtet, keine Querkomponenten des Impulses treten beim Stoß auf ⃗p −Erhaltung: m 1 v 1 = m 1 v 1 + m 2 v 2 ′ ′ 2 2 E-Erhaltung: m 1 v 21 2 aus (a): m 2 v 2 = m 1 v 1 − v 1 m 1 v ′1 2 = + (a) m 2 v ′2 2 ′ ′ (b) (c) ′ m2v2 m 2 v 2 = m 1 v 21 − v 1 = m 1 v 1 − v 1 v 1 + v 1 ′ aus (b): 2 ′ 2 ′ ′ m 2 v 2 = m 2 v 2 v 1 + v 1 ′ 2 ′ ′ v2 = v1 + v1 v 1 = v 2 − v 1 (d) in (c) eingesetzt: ′ ′ ′ ′ m 2 v 2 = m 1 v 1 − v 2 + v 1 = 2m 1 v 1 − m 1 v 2 v 2 m 2 + m 1 = 2m 1 v 1 ′ ′ ′ ′ v 2 = m2m1 +1mv 12 ′ aus (a) m 1 v ′1 = m 1 v 1 − m 2 v ′2 = m 1 v 1 − m 2 v ′1 + v 1 = m 1 − m 2 v 1 − m 2 v ′1 (aus (d) v ′2 = v ′1 + v 1 ) v ′1 m 1 + m 2 = m 1 − m 2 v 1 v ′1 = mm 11 −+mm 22 v 1 Betrachtung von Grenzfällen: v ′1 m2 v ′2 ≫ m 1 −v 1 ...Umkehr ∼ 0 m2 = m1 0 v1 m2 2v 1 ≪ m1 v1 ’Geschwindigkeitstausch’ prallt elastisch nach vorne ab 2. Nicht-zentraler elastischer Stoß Ablenkwinkel von m 2 θ ≠ 0 wenn ⃗v 1 nicht auf Schwerpunkt von m 2 gerichtet ist. ⃗p-Erhaltung: ⃗p 1 +⃗p 2 =⃗p ′1 +⃗p ′2 E-Erhaltung: p 21 2m 1 p2 p′ 2 p′ 2 + 2m22 = 2m1 1 + 2m2 2 +Q (Q auch oft mit entgegengesetztem Vorzeichen definiert) Q=0 alle Energie des Endzustandes=W kin : elastischer Stoß Q>0 ’innere’ Energie, Anregung v. Atomen, Molekülen (setzt innere Struktur des Stoßpartners voraus) ∙ hier jetzt elastische Stöße im ’Laborsystem’ betrachet: (ein Stoßpartner ruht, ⃗v 2 = 0, ⃗ p 2 = 0 ) ⃗p 1 = ⃗p 1 + ⃗p 2 (p⃗ −Erh.) ′ p 21 2m 1 = ′ 2 p ′1 2m 1 + 2 p ′2 2m 2 (E-Erh.) Wegen ⃗ p-Erhaltung: Ebene durch ⃗ p1, ⃗ p 2 muß ⃗ p 1 enthalten! ⃗ p ein = 0 = ⃗ p aus ′ ′ Geeignete Darstellung: auslaufende Teilchen ⃗ p1, ⃗ p 2 in kart. Koord.-System betrachtet: ′ ′ x2 + y2 = p2 2 p 1 − x 2 + y 2 = p 1 in E-Satz eingesetzt ′ 2 ′ p 21 2̸ m 1 = x 2 +y 2 2̸ m 2 p 21 m1 p 1 +x 2 +y 2 + 2̸ m 1 p 21 m1 y2 m2 ⇒ ̸ = m2 + + ̸ − 2pm11x + mx 1 + 2p 1 m 2 = 2v 1 mit μ = mm11+mm22 ”reduzierte Masse” x2 μ + x2 y2 μ 2 y2 m1 = x 2 m12 + 1 m1 + y 2 m12 + − 2v 1 x = 0 ∣ ⋅μ ⇒ x 2 + y 2 − 2v 1 μx = 0 Quadratisch ergänzen: x − v 1 μ 2 = x 2 − 2v 1 μx + v 21 μ 2 x − v 1 μ 2 − v 21 μ 2 + y 2 = 0 x − v 1 μ 2 + y 2 = v 21 μ 2 → Darstellung auf Kreis mit M = v 1 μ, 0; r = v 1 μ Daraus z.B.: maximaler Ablenkwinkel: sin ϑ max = v1μ p 1 −v 1 μ = μ m 1 −μ = 1 m1 μ −1 = ... = m2 m1 für m 2 ≪ m1 1 m1 p2 + m̸11 − 2p 1 m1 x