Handout für das Getriebe Referat
Werbung

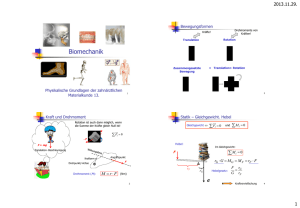
Getriebe Um die gewünschten Fahrleistungen unseres Roboters zu erreichen ist es notwendig den Motor mit einem Getriebe zu koppeln. Doch nicht nur die gewünschte Entgeschwindigkeit sondern auf die nötige Kraft, welche wir benötigen damit unser Roboter anfahren zu lassen, fließen in das Getriebe mit ein. Für die Berechnung des Getriebes waren uns nicht alle Daten bekannt. Hier haben wir durch vergleich mit anderen Messversuchen und Nachschlagewerken einen Wert für die Haftreibungszahl abgeschätzt. Berechnungen von Getrieben: Die Berechnungen von Getrieben folgt einfachen Gesetzmäßigkeiten. Die Übersetzung eines Radpaares ist das Verhältnis der Winkelgeschwindigkeiten. Da bei der Berechnung der Wegstrecke bei einer Umdrehung (Umfang eines Kreises) nur lineare Kenngrößen Einfluss nehmen und man diese Kreisgleichung auf in eine lineare Bewegung überführen kann, ergibt sich die einfache Bewegungsgleichung der Kinematik für unbeschleunigte Körper und konstante Geschwindigkeiten. Für einen Kreis gilt: U = 2*π π*r (wobei U der Umfang und r der Radius des betrachteten Kreises ist.) v=s/t (hier ist s der weg und v die Geschwindigkeit) Die Frequenz ist in unserem Fall gleich die Anzahl der Umdrehungen pro Sekunde. Hierzu bestimmen wir die Anzahl der Umdrehungen pro Minute dividieren diese durch 60 und erhalten dann die Frequenz. Die Winkelgeschwindigkeit ist definiert als: |ω ω| =2*π π*f Da die beiden miteinander gekoppelten Zahnräder sich durch den Radius unterscheiden, erhalten wir (unter der Voraussetzung das diese genügend Haftung haben), ergibt sich auch eine andere Frequenz. Diese Frequenz f’ hat eine andere Winkelgeschwindigkeit zur Folge. Bei den folgenden Betrachtungen liegt wird nach DIN 868 Indexiert, wo definiert ist dass das kleinere Ritzel mit dem Index „1“ und das größere mit dem Index „2“. Da die Übersetzung das Verhältnis der Winkelgeschwindigkeiten ist, ergibt sich: ω2 Übersetzung: i = ω1 /ω Hierbei kann man 2*π aus der Gleichung kürzen und erhält: Übersetzung: i = f1/f2 Da die Frequenz nur die Anzahl der Umdrehung pro Zeiteinheit ist kann man dies auch schreiben als: i = n1/n2 somit ergibt sich schließlich: ω2 = f1/f2 = n1/n2 = rw2/rw1 = dw2/dw1 = z2/z1 i = ω1 /ω Hierbei ist r der Radius des Wälzdurchmessers und d der Wälzdurchmesser des jeweiligen Rades. Unter z versteht man die Anzahl der Zähne eines Zahnrades. Mehrstufige Getriebe: Möchte man die Übersetzung mehrstufige Getriebe errechnen, so reicht es lediglich die Einzelübersetzungen der Teilgetriebe mit einander zu mulitplizieren. Das Drehmoment Definition: Das Drehmoment M ist das Produkt aus der Kraft F und dem Abstand r ihrer Wirkungslinie von der Drehachse: mit mit die zum Moment dazugehörige Si-Einheit: Wird ein starrer Körper durch das Drehmoment M = r * F um den Winkel ∆ϕ gedreht, so hat die äußere Kraft längs des Weges ∆s = r*∆ϕ gewirkt. Die Verrichtete Arbeit ist ∆W = F*r*∆ϕ oder ∆W = M*∆ϕ. Geschieht dies in der Zeit ∆t, so beträgt die Leistung P = ∆W/∆ ∆t = M ∆ϕ/∆ ∆t =Mω ω Ist bei einem Fahrzeug die Leistung bekannt, so kann man mit der Umrechnung der Drehzahl des Motor in die Winkelgeschwindigkeit das Drehmoment M = P/ω bestimmen. Berücksichtig man nun noch die Gangübersetzung i des Getriebes so erhält man das Drehmoment des Antriebrades Ma = i*M= i*P/ω . Nun kann man noch die Antriebkraft des Rades bestimmen indem man die Ausgangsgleichung für das Drehmoment nach der Kraft umstellt: Fa = i*M/ra (wobei ra der Radius des Antriebsrades ist) Unser Getriebe: Da wir von einer Masse unseres Roboters ca. von 8 kg ausgehen erhalten wir eine Gewichtskraft von F = g* F G F = 78,5 N Diese Kraft multipliziert mit der Haftreibungszahl für unsere Räder, welche wir auf 0,6 abgeschätzt haben ergibt die Kraft welche maximal wirken kann und wir nicht in Gleitreibung übergehen. Nimmt man nun noch die Formel M = F * r so kann man bei bekannten Radgrößen das maximale Drehmoment errechnen. In unserem Fall haben die Räder einen Durchmesser von 0,1 Meter. Somit ergibt sich das Drehmoment von 2,4 Nm. Nach den Berechnungen und Messungen unseren Motors ergab sich ein Drehmoment von 0,154 Nm. Das resultierende Getriebe hat somit eine Übersetzung von 15,3. Das von uns verbaute Getriebe hat jedoch eine Größe Übersetzung, da in dieser Kalkulation noch nicht die Reibung der Zahlräder beträgt. Diese schlägt sich bei unserem Getriebe aufgrund seiner Mehrstufigkeit und seiner preiswerten Plast Komponenten in einem Wirkungsfaktor um 0,72 nieder. Somit haben wir eine Getriebeübersetzung von 20:1 realisiert.