Probeklausur zur Kinematik und Dynamik SS 2014
Werbung

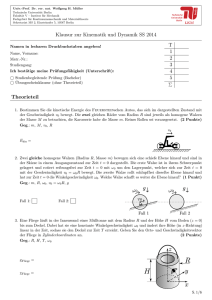
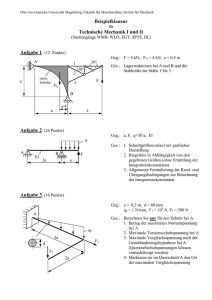
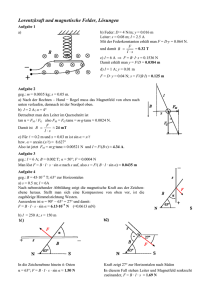
Univ.-Prof. Dr. rer. nat. Wolfgang H. Müller Technische Universität Berlin Fakultät V – Institut für Mechanik Fachgebiet für Kontinuumsmechanik und Materialtheorie Sekretariat MS 2, Einsteinufer 5, 10587 Berlin Probeklausur zur Kinematik und Dynamik SS 2014 Theorieteil 1. Bestimmen Sie den benötigten Bremsweg ℓ eines Autos, um seine kinetische Energie auf 1/3 zu reduzieren. Geg.: 𝜇, 𝑔, 𝑚, 𝑣0 ℓ= 2. Ein stehender Güterwagen der Masse 𝑚1 wird durch einen anderen Güterwagen der Masse 𝑚2 mit einer Geschwindigkeit 𝑣2 gerammt. Welche Geschwindigkeit ergibt sich, wenn die Wagen nach dem Zusammenstoß miteinander zusammengekoppelt sind? Reibung soll vernachlässigt werden. Geg.: 𝑚1 = 20 t, 𝑚2 = 30 t, 𝑣2 = 5 km/h 𝑣= km/h 3. Kreuzen Sie die Kräfte an, die konservativ sind. Gravitationskraft Reibungskraft Federkraft 4. Gegeben sei die Geschwindigkeit 𝑣(𝑥) = 𝐴e𝐶𝑥 eines Massenpunktes in Abhängigkeit seines Ortes 𝑥(𝑡), wobei 𝐴 = const. und 𝐶 = const. Berechnen Sie die Beschleunigung 𝑎(𝑥) in Abhängigkeit des Ortes 𝑥(𝑡). 𝑎(𝑥) = 5. Die potentielle Energie eines Systems sei gegeben durch 𝐸 pot = − 21 𝑚𝜔 2 𝑥2 + 𝑚𝑔𝑦. Bestimmen Sie die Kraft 𝐹 in der Basis (𝑒𝑥 , 𝑒𝑦 , 𝑒𝑧 ). Nehmen Sie hierbei an, dass 𝑚, 𝜔 und 𝑔 konstant sind. 𝐹 = 6. Ein Klotz der Masse 𝑚 rutscht reibungsbehaftet (Reibungskoeffizient 𝜇) auf einer horizontalen Ebene. Welche Beschleunigung hat der skizzierte Klotz für den Fall, dass die Geschwindigkeit 𝑣0 > 0 ist? Bitte ankreuzen. 𝑥 ¨ = 𝑚𝑔 𝑥 ¨ = −𝜇𝑔 𝑥 ¨ = 𝜇𝑔 𝑥 ¨=0 7. Geben Sie die Einheiten folgender Größen über Vielfache der SI-Basiseinheiten an: kg, m, s, K, cd und mol. [𝜔D ] = [𝐸 kin ] = [𝜇H ] = [𝑥 × 𝑝] = 7. Welche Aussagen sind bei harmonischen periodischen Schwingungen zutreffend? Hierbei sind 𝑇 die Perioden­ dauer und 𝜔 die Eigenkreisfrequenz. 𝑥(𝑡) = 𝑥(𝑡 + 𝑇 ) 𝑥(𝑡) = 𝐶1 exp(i𝜔𝑡) + 𝐶2 exp(−i𝜔𝑡) , 𝐶1 , 𝐶2 ∈ R 𝑥(𝑡) = 𝐾 arctan(𝜔𝑡) , 𝐾 ∈ C 8. 𝑥(𝑡) = 𝐴 cos(𝜔𝑡) + 𝐵 sin(𝜔𝑡) , 𝐴, 𝐵 ∈ R Für die gezeigte homogene Tonne wurde für die Symmetrieachse 𝑧 das Massenträgheitsmoment 𝛩𝑧𝑧 sowie der Radius 𝑅 gemessen. Die Höhe der Tonne ist jedoch unbekannt. Bestimmen Sie den Faktor 𝛾, sodass die Höhe der Tonne 𝛾𝑅 ist. Geg.: 𝑅, 𝜌0 , 𝛩𝑧𝑧 = 𝜌0 π𝑅5 𝛾= S. 1/2 Univ.-Prof. Dr. rer. nat. Wolfgang H. Müller Technische Universität Berlin Fakultät V – Institut für Mechanik Fachgebiet für Kontinuumsmechanik und Materialtheorie Sekretariat MS 2, Einsteinufer 5, 10587 Berlin Rechenteil 1 Knicken ist so toll Der dargestellte Balken ist mit einer Normalkraft 𝐹 > 0 belastet. Es soll das Knickproblem untersucht werden. a) Geben Sie die Knickgleichung und ihre allgemeine Lösung an. b) Bestimmen Sie die notwendige Anzahl von Randbedingungen, um die Konstanten in der Lösung der Knickgleichung berechnen zu können. c) Bestimmen Sie die Eigenwertgleichung (charakteristische Gleichung). d) Berechnen Sie die kritische Last 𝐹Krit für den Spezialfall, dass die Feder unendlich weich ist. Geg.: 𝐸𝐼, ℓ, 𝑐 2 Schwingung auch Das skizzierte System besteht aus zwei Zahnscheiben, zwei Federn und einem Dämpfer. Für 𝜙1 = 𝜙2 = 0 seien die Federn entspannt. Die Trägheitsmomente der Zahnscheiben sind bzgl. ihrer Schwerpunkte bekannt. Zur Zeit 𝑡 = 0 sind die Anfangswerte 𝜙1 (𝑡 = 0) = 𝜙0 und 𝜙˙ 1 (𝑡 = 0) = 0 gegeben. a) Ermitteln Sie die Bewegungsgleichung des Systems bzgl. der Koordinate 𝜙1 für kleine Auslenkungen. b) Ermitteln Sie die statische Ruheauslenkung 𝜙1stat . c) Transformieren Sie die Bewegungsgleichung in die Koor­ dinate 𝜙˜ der statischen Ruhelage über 𝜙1 = 𝜙˜ + 𝜙1stat . d) Lösen Sie die transformierte Bewegungsgleichung unter der Annahme schwacher Dämpfung mit den gegebenen Anfangswerten. Identifizieren sie die Größen 𝛿 und 𝜔 2 der generischen Lösung. Beachten Sie, dass die Randbedin­ gungen ebenfalls transformiert werden müssen. Geg.: 𝛩S2 = 𝛩S1 = 𝛩, 𝑚, 𝑎, 𝑏, 𝑐, 𝑑, 𝑔 3 Kinetik erst recht Drei Riemenscheiben sind über zwei aufgerollte nicht dehnbare Seile schlupffrei miteinander verbunden. Die Seile laufen zwischen den Riemenscheiben parallel zur Horizon- und Vertikalen. Der Schwerpunkt S2 ist vertikal, S3 𝑖 bzgl. 𝑆 zu verstehen. horizontal geführt. Hier ist 𝛩𝑧𝑧 𝑖 a) Fertigen Sie für jede Rolle i) einen vollständigen Frei­ schnitt an und ii) stellen Sie den Drall- als auch den Schwerpunktsatz voll auf. Zählen Sie alle unbekannten Größen Ihrer gefundenen Gleichungen auf. Wie viele kine­ matische Beziehungen sind nötig, um das Gleichungssys­ tem lösen zu können? b) Stellen Sie alle kinematischen Beziehungen auf. Verwenden Sie hierbei ausschließlich die Formel 𝑣 P = 𝑣 Q + 𝜔 × 𝑥QP und Lagerargumentationen. Stellen Sie dazu die benö­ tigten Geschwindigkeits-, Winkelgeschwindigkeits- und Abstandsvektoren auf und werten Sie die Gleichungen aus. 1 , 𝛩2 , 𝛩3 , 𝑔 Geg.: 𝑅1 , 𝑟1 , 𝑅2 , 𝑟2 , 𝑅3 , 𝑚1 , 𝑚2 , 𝑚3 , 𝛩𝑧𝑧 𝑧𝑧 𝑧𝑧 S. 2/2