c LehrstuhlfürTechnischeElektrophysik
Werbung

-T
U
M
ün
ch
e
n
Lehrstuhl für Technische Elektrophysik
Technische Universität München
Skriptum zur Vorlesung
tro
ph
ys
ik
Elektrizität und Magnetismus
ek
Ordinarius: Prof. Dr. G. Wachutka
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
3. August 2010
c
uh
l
hr
st
Le
für
ch
e
Te
ch
nis
ph
ys
tro
ek
El
ik
-T
U
M
ün
ch
e
n
Inhaltsverzeichnis
Inhaltsverzeichnis
Inhaltsverzeichnis
5
ch
e
n
0. Vorbemerkungen
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ch
e
El
ek
tro
ph
ys
ik
-T
U
M
ün
1. Elektrostatik
1.1. Elektrische Ladung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2. Kräfte zwischen elektrischen Punktladungen . . . . . . . . . . . . . . . . . . . .
1.3. Elektrische Feldstärke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4. Elektrische Arbeit, Spannung und Potential . . . . . . . . . . . . . . . . . . . .
1.4.1. Elektrische Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.2. Elektrische Spannung und Potential . . . . . . . . . . . . . . . . . . . .
1.5. Elektrische Felder in polarisierbaren materiellen Medien . . . . . . . . . . . . .
1.5.1. Elektrische Permittivität (Dielektrizitätskonstante) . . . . . . . . . . . .
1.5.2. Dielektrische Verschiebung, Gaußsches Gesetz . . . . . . . . . . . . . . .
1.6. Kontinuierliche Ladungsverteilungen . . . . . . . . . . . . . . . . . . . . . . . .
1.6.1. Raumladungsdichte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.2. Oberflächenladungsdichte . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.3. Gaußsches Gesetz für Ladungsverteilungen (in integraler Form) . . . . .
1.6.4. Gaußsches Gesetz in differentieller Form . . . . . . . . . . . . . . . . . .
1.6.5. Lösung der Poissongleichung im unbeschränkten E3 (Coulombpotential) .
1.7. Elektrische Felder zwischen leitenden Medien . . . . . . . . . . . . . . . . . . .
1.7.1. Influenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7.2. Elektrische Kapazität . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7.3. Kondensatoraggregate . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.7.4. Elektrische Feldenergie . . . . . . . . . . . . . . . . . . . . . . . . . . . .
für
Te
ch
nis
2. Stationäre Ströme
2.1. Stromstärke, Stromdichte . . . . . . . . . . . .
2.2. Ladungsträgertransport im elektrischen Feld . .
2.2.1. Transport ohne Stoßprozesse (Vakuum)
2.2.2. Transport mit Stoßprozessen . . . . . .
2.3. Ladungserhaltung . . . . . . . . . . . . . . . . .
2.4. Schaltungen mit Widerständen . . . . . . . . .
2.5. Elektrische Leistung und Energieübertragung .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
hr
st
uh
l
3. Magnetostatik
3.1. Kräfte auf bewegte Ladungen im Magnetfeld . . . . . . . . . .
3.2. Kraft und Drehmoment auf stromführende Leiter . . . . . . . .
3.3. Permanentmagnet . . . . . . . . . . . . . . . . . . . . . . . . .
3.4. Quellenfreiheit (Divergenzfreiheit) des B-Feldes . . . . . . . . .
3.5. Erzeugung magnetostatischer Felder . . . . . . . . . . . . . . .
3.5.1. Amperesches Durchflutungsgesetz . . . . . . . . . . . . .
3.5.2. Magnetische Feldstärke . . . . . . . . . . . . . . . . . .
3.5.3. Permeabilität µ und magnetische Suszeptibilität χm . .
3.6. Berechnung magnetostatischer Felder und Kräfte . . . . . . . .
3.7. Vervollständigung des Ampèresches Gesetzes . . . . . . . . . .
3.7.1. Erweiterung des Ampèreschen Gesetzes (nach Maxwell)
Le
c
.
.
.
.
.
.
.
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
8
9
11
11
11
15
15
15
18
18
18
18
19
21
23
23
23
25
28
.
.
.
.
.
.
.
30
30
32
32
32
35
36
38
.
.
.
.
.
.
.
.
.
.
.
40
40
43
45
46
47
47
47
48
49
52
52
Inhaltsverzeichnis
53
4. Induzierte Elektrische Felder
4.1. Bewegungsinduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1. Elektromotorische Kraft in bewegten leitfähigen Medien . . . . . . . . . . .
4.1.2. Induzierte Spannung in bewegter Leiterschleife . . . . . . . . . . . . . . . .
4.1.3. Unipolar-Maschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2. Ruheinduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1. Induzierte Spannung in ruhender Leiterschleife . . . . . . . . . . . . . . . .
4.2.2. Maxwellsche Verallgemeinerung: Differentielle Form des Induktionsgesetzes
4.3. Allgemeine Induktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4. Maxwellsche Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
54
54
54
55
56
56
57
58
59
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
tro
ph
ys
ik
A. Mathematische Grundlagen
A.1. Euklidischer, affiner Raum E3 . . . . . . . . . . . . . . . . . .
A.1.1. Struktur . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.2. Ursprung . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.3. Basis . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.4. Skalarfeld . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.5. Vektorfeld . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.6. Ortsabhängige Basisvektoren . . . . . . . . . . . . . .
A.1.7. Konvergenz, Stetigkeit, Differenzierbarkeit . . . . . . .
A.2. Wegintegrale im En bzw. Rn . . . . . . . . . . . . . . . . . . .
A.2.1. Allgemein . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.2. Konservative Kraftfelder . . . . . . . . . . . . . . . . .
A.3. Totale Ableitung und Gradient . . . . . . . . . . . . . . . . .
A.3.1. Linearformen und dualer Raum . . . . . . . . . . . . .
A.3.2. Totales Differential und Gradient als duale Größen . .
A.3.3. Richtungsableitung und partielle Ableitung . . . . . .
A.4. Krummlinige Koordinaten . . . . . . . . . . . . . . . . . . . .
A.4.1. Begleitendes n-Bein . . . . . . . . . . . . . . . . . . .
A.4.2. Gradient in krummlinigen Koordinaten . . . . . . . . .
A.5. Gradientenfelder und Potentialfunktionen . . . . . . . . . . .
A.6. Flächenintegrale im E3 . . . . . . . . . . . . . . . . . . . . . .
A.7. Divergenz eines Vektorfeldes im E3 . . . . . . . . . . . . . .
A.7.1. Divergenzoperator . . . . . . . . . . . . . . . . . . . .
A.7.2. Darstellung der Divergenz in kartesischen Koordinaten
A.7.3. Integralsatz von Gauß . . . . . . . . . . . . . . . . . .
A.7.4. Divergenzoperator in krummlinigen Koordinaten . . .
A.8. Rotation und Satz von Stokes . . . . . . . . . . . . . . . . . .
A.8.1. Rotationsoperator . . . . . . . . . . . . . . . . . . . .
A.8.2. Integralsatz von Stokes . . . . . . . . . . . . . . . . . .
A.8.3. Darstellung der Rotation in kartesischen Koordinaten
-T
U
M
ün
ch
e
3.7.2. Ampère-Maxwellsches Gesetz in differentieller Form . . . . . . . . . . . . .
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
n
Inhaltsverzeichnis
61
61
61
62
62
63
63
64
65
67
67
67
69
69
71
72
76
76
77
79
82
84
84
84
85
86
88
88
88
90
0 VORBEMERKUNGEN
n
0. Vorbemerkungen
=
=
20
5
×
Maßeinheit
km
h
Zoll (inch)
-T
U
v
L
Maßzahl
ün
Beispiel:
=
M
Physikalische Größe
ch
e
(i) Eine physikalische Größe (z.B. die Geschwindigkeit v oder die Länge L) wird durch eine
Maßzahl in Verbindung mit einer Maßeinheit beschrieben.
tro
ph
ys
ik
(ii) Für eine physikalische Größe existieren oft mehrere unterschiedliche Maßeinheiten. Um
physikalische Größen und physikalische Zusammenhängen einheitlich zu definieren, wurde
1960 ein kohärentes System von Maßeinheiten geschaffen. Es besteht aus den sogenannten
SI-Einheiten (Système Internationale des unités). Als SI-Einheiten werden 7 Basiseinheiten
bezeichnet, von denen Maßeinheiten für alle übrigen physikalischen Größen abgeleitet werden
können.
Einheit
Meter
Sekunde
Kilogramm
Ampère
Kelvin
Candela
Mol
Abkürzung (Symbol)
m
s
kg
A
K
cd
mol
%
für
Te
ch
nis
Länge
Zeit
Masse
elektr. Stromstärke
Temperatur
Lichtstärke
Stoffmenge
ch
e
Größe
&
$
El
'
ek
Die 7 Basiseinheiten sind folgende
c
Le
hr
st
uh
l
Abgeleitete Maßeinheiten ergeben sich aus den jeweilig relevanten physikalischen Zusammenhängen. Exemplarisch sind hier einige Maßeinheiten durch SI-Einheiten ausgedrückt
Größe
Geschwindigkeit
Kraft
Arbeit
Leistung
Ladung
elektrische Spannung
Einheit
=
=
=
=
=
=
Länge/Zeit
Masse × Beschleunigung
Kraft × Weg
Arbeit
Zeit
Stromstärke × Zeit
Arbeit
Ladung
5
m
s
1 N (Newton) = 1kg × 1 sm2 = 1 kgs2m
1 J (Joule) = 1 N × 1 m = 1 Nm
1 W (Watt) = 1 J/1 s = 1 Js
1 C (Coulomb) = 1As
m2
m2
1 V (Volt) = 1 J/1 C = 1 kg
= 1 kg
s2 A s
A s3
0 VORBEMERKUNGEN
v=
1,852 km
km
m
1000 m
= 1,852
= 0,514
= 1,852
1h
h
3600
s
s
| {z }
1 Knoten
M
L
t
-T
U
v=
ün
Beispiel 1:
Die Geschwindigkeit v, die sich aus dem Verhältnis von zurückgelegter Weglänge L
zur benötigten Zeit t ergibt.
ph
ys
ik
Beispiel 2:
Die kinetische Energie eines zweifach geladenen Ions mit der Ladung Q, das in
einem Ionenbeschleuniger mit der Spannung 20 kV (U = 20 kV) beschleunigt wird,
ergibt sich aus dem Produkt von Ladung Q und Spannung U .
tro
Wkin = Q · U = 2qel · 20 kV
mit
ek
qel = 1,602 × 10−19 C = e (Elementarladung)
El
=⇒ Wkin = 6,408 × 10−15 C · V = 6,408 × 10−15 J
Anschaulicher:
Q U
Q U
· · eV =
·
· keV = 2 · 20 keV = 40 keV
e V
e kV
ch
e
Wkin =
Te
ch
nis
keV ist keine SI-Einheit, aber praktisch und anschaulich
(iv) Größenordnungen:
101
dezi
d
centi
c
h
103
kilo
k
10−3
milli
m
mega
M
10−6
mikro
µ
giga
G
10−9
nano
n
T
10−12
piko
p
femto
f
für
hekto
uh
l
1012
hr
st
10−1
10−2
109
Le
da
102
106
c
deka
tera
1015
peta
P
10−15
1018
exa
E
10−18
atto
a
Z
10−21
zepto
z
1021
zetta
Tabelle 1: 10n , n > 0
Tabelle 2: 10n , n < 0
6
ch
e
n
(iii) Größengleichungen sind Zusammenhänge zwischen physikalischen Größen, die durch mathematische Gleichungen dargestellt werden und unabhängig vom Basiseinheitensystem gelten.
1 ELEKTROSTATIK
1. Elektrostatik
ch
e
n
1.1. Elektrische Ladung
-T
U
M
ün
Bis zum Jahre 2009 sind nachfolgende experimentelle Erfahrungen über elektrische Ladungen
gesammelt worden:
ph
ys
ik
(i) Ladung ist eine fundamentale Eigenschaft aller Elementarteilchen (wie Masse, Spin, Charm,
Flavor, Color) . Sie ist die Quelle für die elektrische (elektromagnetische) Wechselwirkung,
einer der vier Grundkräfte der Physik (neben starker und schwacher Wechelwirkung sowie
der Gravitation).
tro
(ii) Es gibt zwei Klassen von Ladungen:
⊕, ch
e
El
ek
positive und negative, dabei gilt, dass sich gleichnamige Ladungen abstoßen und ungleichnamige Ladungen gegenseitig anziehen.
Te
ch
nis
(iii) Die elektrische Gesamtladung in einem abgeschlossenen System bleibt erhalten. d.h. ⊕ und
kann nur paarweise erzeugt bzw. vernichtet werden.
→ z.B. Materie ↔ Antimaterie, »echte« Teilchen
→ z.B. Elektron ↔ Loch=Defektelektron (»Quasi-Teilchen«)
uh
l
für
(iv) Ladung ist quantisiert:
Elementarladung: |e| = qel = 1, 602 · 10−19 C
1Coulomb = 1C = 1As
qE = ±NE · q
mit N ∈ N
c
Le
hr
st
Alle (trennbaren) Elementarteilchen haben eine elektrische Ladung:
Hadronen (wie die Baryonen Proton und Neutron) bestehen ihrerseits aus Quarks mit
qQ = ±NQ ·
e
3
mit NQ = {1, 2},
welche aber nur nur gebunden vorkommen.
7
1.2 Kräfte zwischen elektrischen Punktladungen
1 ELEKTROSTATIK
-T
U
M
ün
ch
e
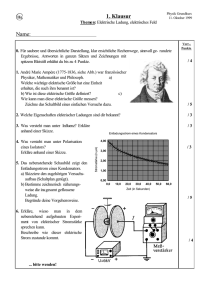
(i) Kraftwirkung:
Zwei diskrete Ladungen beeinflussen sich gegenseitig dahingehend, dass die beiden Ladungen
Kräfte entlang der Verbindungslinie der Schwerpunkte der beiden Ladungen erfahren. Die
Kraft F~1←2 beschreibt die Kraft, die auf Ladung q1 aufgrund der Anwesenheit der Ladung q2
wirkt. Vom Betrag her sind die beiden korrenspondierenden Kräfte F~1←2 und F~ 2←1 gleich
groß und proportional zu den beiden Ladungen q1 und q2 sowie zum Kehrwert des Abstandes
der beiden Ladungen im Quadrat |~r2 − ~r1 |2 .
n
1.2. Kräfte zwischen elektrischen Punktladungen
|q1 · q2 |
|F~2←1 | = |F~1←2 | =
· γe
|~r2 − ~r1 |2
1
γe =
4π · 0
As
0 = 8, 854 · 10−12
Vm
I
r2 < rI
tro
+
0 ist die „Dielektrizitätskonstante“ im Vakuum,
auch „Permittivität“ genannt
ph
ys
ik
1
O
El
ek
Abb. 1: Kraftwirkung zwischen zwei
Punktladungen
=
=
sgn (q2 )
− sgn (q2 )
⇔
⇔
Abstoßung
Anziehung
Te
ch
nis
sgn (q1 )
sgn (q1 )
ch
e
(ii) Ob sich die beiden Ladungen q1 und q2 abstoßen oder anziehen, hängt von dem Vorzeichen
der beiden Ladungen ab. Grundsätzlich gilt, dass sich gleichnamige Ladungen abstoßen und
ungleichnamige anziehen.
(iii) Das Grundprinzip der Mechanik »actio et reactio« gilt auch für die beiden korrespondierenden Kräfte F~1←2 und F~ 2←1 :
parallel zu ~r2 − ~r1
für
F~2←1 = −F~1←2 ,
hr
st
uh
l
Obige drei Punkte lassen sich in kompakter Form, als Coulombsches Gesetz zusammenfassen:
1
q1 · q2
F~2←1 = −F~1←2 =
·
· (~r2 − ~r1 )
(1.1)
4π · 0 |~r2 − ~r1 |3
c
Le
(iv)
Das Superpositionsprinzip wird dann angewendet, wenn elektrische Kräfte auf
Ladungen bei Anordnungen mit mehr als zwei punktförmigen Ladungen untersucht werden
sollen. Aus experimenteller Erfahrung erkennt man, dass eine Anordnung von N Ladungen
(qi an den Orten Pi )i=1...N , auf eine weitere Ladung q am Ort P = O + ~r die folgende Kraft
ausübt:
8
i=1
..
.
q · qi
1
·
· (~r − ~ri )
4π · 0 | ~r − ~ri |3
ch
e
N
X
F~q (~r) =
1.3 Elektrische Feldstärke
n
1 ELEKTROSTATIK
N
X
q
qi
·
· (~r − ~ri )
4π · 0
|~r − ~ri |3
i=1 |
{z
}
+
(1.2)
O
-T
U
F~q (~r) =
M
ün
bzw.
Abb. 2: Superpositionsprinzip
ik
Quellen des Kraftfeldes
ek
tro
ph
ys
Die Kräfte auf eine Ladung q addieren sich also in solcher Weise vektoriell, dass die elektrischen
Kräfte auf die Ladung q, die durch jede andere Ladung qi verursacht werden, ungestört überlagert
werden.
El
1.3. Elektrische Feldstärke
erfährt.
Te
ch
nis
ch
e
(i) Allgemein
Idee:
~ r) sodass eine am Ort P = O+~r
Eine Ladungsverteilung (qi , r~i )i=1...N erzeugt ein Kraftfeld E(~
befindliche Punktladung q, die elektrostatische Kraft
~ r)
F~q (~r) = q · E(~
uh
l
für
~ - Feld einer diskreten Ladungsverteilung (qi , r~i )i=1...N beschreiben:
Damit lässt sich das E
N
X
1
qi
·
· (~r − ~ri )
4π · 0
|~r − ~ri |3
(1.3)
i=1
~ = V
dim(|E|)
m
c
Le
hr
st
N = 1V,
→ Einheit: 1 As
m
~ r) =
E(~
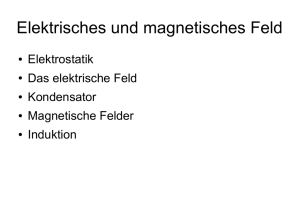
(i) Spezialfälle
a) Monopolfeld: N = 1
~ M (~r) =
E
1
q0
·
· (~r − ~r0 )
4π · 0 |~r − ~r0 |3
9
(1.4)
1.3 Elektrische Feldstärke
1 ELEKTROSTATIK
ch
e
n
S. 6
-
M
ün
+
-T
U
Abb. 3: Elektrisches Feld einer Punktladung q0 , mit q0 >0 (links)
bzw. q0 <0 (rechts)
1
1
Q
~ D (~r) =
·
· (~r − ~r1 ) −
· (~r − ~r2 )
E
4π · 0
|~r − ~r1 |3
|~r − ~r2 |3
G
ek
E = Tangentenvektor
an Feldlinie
G
E
G
E
G
E
G
E+
G
E−
Te
ch
nis
−
ch
e
El
+
(1.5)
tro
ph
ys
S. 7_1
ik
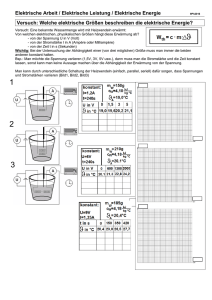
• Dipolfeld: (Q, r~1 ), (−Q, r~2 )
Abb. 4: Elektrisches Feld zweier ungleichnamiger, betragsmäßig gleicher
Punktladungen (Dipolfeld)
uh
l
für
Beachte : Feldlinien beginnen bei der positiven Ladung und enden bei der negativen
Ladung.
hr
st
Zusatz :
~r(λ);
λ ∈ [λ0 , λ1 ]
Bestimmungsgleichung:
d ~r
~ r(λ))
= E(~
dλ
c
Le
Parameterdarstellung einer Feldlinie:
bzw.
d ~r
~ r(λ)) = 0
× E(~
dλ
10
1 ELEKTROSTATIK
1.4 Elektrische Arbeit, Spannung und Potential
1.4. Elektrische Arbeit, Spannung und Potential
n
1.4.1. Elektrische Arbeit
α)
-T
U
(0, l) 3 s 7→ ~r(s)
dr
M
Kraftfeld F~ (~r) längs Weg C (P1 , P2 ) ⊂ E3
Bogenlänge s
Parameterdarstellung in Bogenlänge s:
ün
ch
e
Definition der Arbeit:
⇒ ~r(0) = ~r1
⇒ ~r(l) = ~r2
ph
ys
ik
Tangentialvektor:
d ~r =1
d s
~t = d ~r ;
ds
Abb. 5: Wegintegral
tro
Linienelement:
El
ek
d ~r = ~t d s
ˆ
l
ˆ
|F~ (~r(s))| cos α(s)ds =
Te
ch
nis
W12 =
ch
e
Arbeit, um eine Punktladung von P1 nach P2 zu bringen:
0
0
l
ˆ
F~ (~r(s)) · ~t(s) ds =
|{z}
= dd ~rs
F~ (~r) · d ~r
(1.6)
C(P1 ,P2 )
1.4.2. Elektrische Spannung und Potential
ElektrischeSpannung =
uh
l
für
(i) Definition:
Elektrische Arbeit
Probeladung
c
Le
hr
st
~ gelangt man zu:
Durch Gleichung (1.6) und F~ = q · E,
ˆ
W12
~ · d ~r
U12 =
=
E
q
C(P1 ,P2 )
Einheit:
dim(W12 ) = J(oule)
dim(U12 ) = V(olt)
11
(1.7)
1.4 Elektrische Arbeit, Spannung und Potential
1 ELEKTROSTATIK
(ii) Grundgesetz der Elektrostatik:
ch
e
n
Elektrostatische Felder sind konservativ!
ˆ
ch
e
El
ek
tro
ph
ys
(iii) Folgerung:
Bei elektrostatischen Feldern gilt für jede geschlossene Kurve C
ik
-T
U
∂Ej
∂Ei
=
∀i, j mit i 6= j (nur in kartesischen Koordinaten)
∂xi
∂xj
M
P1
C(P1 ,P2 )
Beweis:
ün
D.h. die Spannung U12 hängt nur von P1 und P2 ab, nicht aber vom verbindenden Weg
C(P1 , P2 ).
ˆ P2
ˆ
~ · d ~r
~
E · d ~r =
E
˛
~ · d ~r =
E
Te
ch
nis
C
~ · d ~r = 0
E
(1.8)
C
uh
l
insbesondere:
für
(iv) Definition:
Wählt man einen festen Bezugspunkt P0 , so bezeichnet man die elektrische Spannung zwischen einem beliebigen Punkt P und P0 als elektrisches Potential bezüglich P0 :
ˆ
P0
Φ(P ) = U10 =
ˆ
~ · d ~r = −
E
P
P
~ · d ~r
E
(1.9)
P0
Φ(P0 ) = 0
U12 = Φ(P1 ) − Φ(P2 )
c
Le
hr
st
(v) Folgerung:
+
12
(1.10)
1.4 Elektrische Arbeit, Spannung und Potential
ˆ
P2
~ · d ~r =
E
P1
P0
| P1
ˆ P2
~ · d ~r
~ · d ~r +
E
E
P0
{z
} |
{z
}
−Φ(P2 )
Φ(P1 )
ˆ
P
Φ(P ) = Φ(P0 ) −
n
ˆ
U12 =
ch
e
Beweis:
~ · d ~r
E
ün
1 ELEKTROSTATIK
(1.11)
M
P0
-T
U
(vi) Äquipotentialflächen:
Die Flächen Φ(P (~r)) = const. heißen Äquipotentialflächen. Für zwei beliebige Punkte
P1 , P2 ∈ {O + ~r ∈ E3 |Φ(~r) = const.}
ist
ph
ys
Längs jeden Weges
ik
U12 = 0.
C ⊂ {O + ~r ∈ E3 |Φ(~r) = const.}
ˆ
ist
tro
~ · d ~r = 0.
E
C
ek
~ steht senkrecht auf allen Tangenten an die Äquipotentialfläche, d.h.
E
ch
e
El
~ Oberflächennormale.
E
Te
ch
nis
(vii) Beispiel:
Potential einer Punktladung Q am Ort PQ = O +~rQ :
+
+
hr
st
uh
l
für
P = O+r
~ r) = Q · (~r − ~rQ )
E(~
4π0 |~r − ~rQ |3
c
Le
Potential am Ort P1 :
ˆ
P
Φ(P ) = −
P0
ˆ
~ · d ~r =
E
P0
P
~ · d ~r = Q ·
E
4π0
1
1
−
|~r − ~rQ | |~r0 − ~rQ |
(1.12)
Für den Referenzpunkt |~r0 | → ∞ folgt das Potential:
Φ(~r) =
1
Q
·
+ (Φ∞ )
4π0 |~r − ~rQ | | {z }
=0
13
(1.13)
1.4 Elektrische Arbeit, Spannung und Potential
Nebenrechnung:
ˆ
P0
Φ(~r) =
1 ELEKTROSTATIK
ˆ
~ · d ~r =
E
P
(~r − ~rQ )
Q
·
· d ~r
4π0 |~r − ~rQ |3
n
P
P0
ch
e
Parametrisierung des Weges mit λ:
Φ(~r(λ)) =
ˆ
~ · d ~r(λ) =
E
P
ˆ
λ0
Φ(~r(λ)) =
λ1
λ0
λ1
-T
U
P0
λ~e d ~r
d ~r
Q
· 3·
d λ, mit
= ~e :
4π0 λ d λ
dλ
Q
λ~e
Q
·
·
· ~e d λ =
4π0 λ3
4π0
ˆ
λ0
λ1
1
Q
·
dλ =
λ2
4π0
mit
λ1 = |~r − ~rQ |,
1
−
λ0
−
1
−
λ1
tro
und
ik
ˆ
M
~r − ~rQ
; λ1 = |~r − ~rQ |; λ0 = |~r0 − ~rQ |
|~r − ~rQ |
ph
ys
~e =
ün
C : ~r(λ) = ~rQ + λ~e; λ1 ≤ λ ≤ λ0
ek
λ0 = |~r0 − ~rQ |,
gelangt man zur Gleichung
El
1
1
−
|~r − ~rQ | |~r0 − ~rQ |
(1.14)
ch
e
Q
Φ(~r) =
·
4π0
Te
ch
nis
und mit dem Bezugspunkt im Unendlichen r~0 → ∞ erhält man:
Φ(~r) =
1
Q
·
4π0 |~r − ~rQ |
Äquipotentialflächen sind konzentrische Kugeloberflächen mit Zentrum ~rQ .
Q
1
·
4π0 Φ0
hr
st
uh
l
für
Φ(~r) = const. = Φ0 ⇔ |~r − ~rQ | =
c
Le
(viii) Beispiel: Potential einer diskreten Ladungsverteilung Mit Anwendung des Superpositionsgesetzes und Gleichung (1.13) ergibt sich für das Potential der Ladungsverteilung:
Φ(~r) =
n
X
1
qi
·
4π0
|~r − ~ri |
i=1
14
(1.15)
1 ELEKTROSTATIK
1.5 Elektrische Felder in polarisierbaren materiellen Medien
1.5. Elektrische Felder in polarisierbaren materiellen Medien
ch
e
n
Ein polarisierbares elektrisches Medium heißt »Dielektrikum«.
ün
1.5.1. Elektrische Permittivität (Dielektrizitätskonstante)
-T
U
N
X
q
1 ~
qi
· Fq,vac (~r) =
·
(~r − ~ri )
F~q (~r) =
r
4π 0 r
|~r − ~ri |3
|{z} i=1
M
(i) In elektrisch polarisierbarem Material (lineares Material) gilt das Coulombsche Gesetz, aber
mit verringerter Kraftkonstante:
=
ph
ys
ik
Dabei gilt r ≥ 1.
(1.16)
ek
dielektrische Konstante
relative dielektrische Konstante
dielektrische Konstante des Vakuums
ch
e
Te
ch
nis
Typische Werte für r :
:
:
:
El
= 0 · r
r
0
tro
(ii) Die dielektrische Konstante ist definiert durch
:
:
:
:
r
r
r
r
= 1, 0005 . . . 1, 0010
= 1, 5 . . . 10
= 81
= 103 . . . 104
für
Gase(Luft)
organische Materialien, Öl
Wasser
Keramik-Werkstoffe (high-k)
1.5.2. Dielektrische Verschiebung, Gaußsches Gesetz
uh
l
(i) Def.:
~ r) = 0 r E(~
~ r)
D(~
~ ist allein durch die erzeugende Ladungsverteilung (qi , ~ri )i=1...N bestimmt und somit maD
terialunabhängig, denn
N
qi
1 X
~
D(~r) =
·
(~r − ~ri ).
4π
|~r − ~ri |3
hr
st
Le
c
(1.17)
i=1
(ii) Verschiebungsfluss und eingeschlossene Ladung:
Verschiebungsfluss durch Hüllfläche H = ∂V :
ˆ
~ d ~a
D
∂V
15
1.5 Elektrische Felder in polarisierbaren materiellen Medien
1 ELEKTROSTATIK
~
D-Feld
einer Punktladung Q am Ursprung:
ch
e
n
~ r) = 1 · Q · ~r mit r = |~r|
D(~
4π r3
Die Oberfläche einer Kugel K(O, R) ist
d a = Nda
-T
U
~ = ~er = ~r ,
N
r
und dem vektoriellen Oberflächenelement
~r
d a.
r
ik
~ da =
d ~a = N
M
+
mit dem äußeren Normalenvektor
ün
∂K(O, R) = {O + ~r ∈ E3 |~r| = R},
G
r G
=N
r
G G
d a = er R 2 sinϑ dϑ dϕ
G
tro
er =
•
dΩ
ch
e
El
ek
•
ph
ys
S. 14_2
Der Verschiebungsfluss durch die Hüllfläche H = ∂K(O, R) ist
ˆ
ˆ
Q
~r ~r
· da =
3 r
2
r
4πR
| {z }
Te
ch
nis
~ d ~a = Q ·
D
4π
∂K(O,R)
ˆ
da = Q
∂K(O,R)
4πR2
=Q
4πR2
uh
l
für
1
= 12
r2
R
c
Le
hr
st
(iii) Verallgemeinerung (ohne Beweis), Ladung Q an bel. Ort P0 = O + ~r0 , und beliebig
geformter Hüllfläche H = ∂V :
~ r) sei ein Verschiebungsfeld, das von Q (am Ort P0 plaziert) erzeugt wird:
D(~
Dann gilt:
Q
~ r) = 1 ·
D(~
(~r − ~r0 ).
4π |~r − ~r0 |3
ˆ
(
~ d ~a =
D
Q
0
∂V
16
für
für
P0 ∈ V \ ∂V
P0 ∈
/ V \ ∂V
(1.18)
1 ELEKTROSTATIK
1.5 Elektrische Felder in polarisierbaren materiellen Medien
ch
e
n
äußere Normale N
H = ∂V Rand von V ("Hüllfläche")
M
ün
Q
-T
U
Gebiet V ("Kontrollvolumen")
ph
ys
ik
(iv) Gaußsches Gesetz (für Punktladungen):
Das Superpositionsgesetz (siehe Abschnitt 4) und Gleichung (1.18) liefern für eine beliebige
Ladungsverteilung (qi , ~ri )i=1...N und beliebige Hüllflächen ∂V :
ˆ
X
~ d ~a = Q(V ) =
D
qi
(1.19)
O+~ri ∈V
∂V
ek
ˆ
tro
~ r) = PN (. . .) kann auch Quellenpunkte
Q(V ) ist die von ∂V eingeschlossene Ladung. D(~
i=1
O + ~ri ∈
/ V enthalten.
El
~ r) d ~a = Q(V )
D(~
∂V
∂V
~r − ~r0
· d ~a =
|~r − ~r0 |3
(
ch
e
ˆ
Te
ch
nis
ˆ
für
für
~r0 ∈ V \ ∂V
~r0 ∈
/ V \ ∂V
N
X
1 X
qi
(~
r
−
~
r
)
d
~
a
=
qi
i
4π
|~r − ~ri |3
~
ri ∈V
i=1
c
Le
hr
st
uh
l
für
∂V
4π
0
17
1.6 Kontinuierliche Ladungsverteilungen
1 ELEKTROSTATIK
1.6. Kontinuierliche Ladungsverteilungen
n
1.6.1. Raumladungsdichte
Zahl der Ladungen (netto) in ∆V (~r)
, für |∆V (~r)| → 0
|∆V (~r)|
ün
ρ(~r) =
ch
e
(i) Idee:
M
(ii) Definition:
ˆ
ρ(~r) d3 r ⇒ kurz: ρ(~r) =
Q(V ) =
Q(∆V (~r))
r)|
|∆V (~
r)|→0 |∆V (~
lim
ph
ys
ik
V
-T
U
ρ(~r) d3 r = ρ(x, y, z) d x d y d z ist in kartesischen Koordinaten die im Volumenelement d3 r
enthaltene differentielle Ladung d Q, sodass für beliebige Kontrollvolumina V gilt:
tro
1.6.2. Oberflächenladungsdichte
El
Zahl der Ladungen in ∆A(~r)
, für |∆A(~r)| → 0
|∆A(~r)|
ch
e
σ(~r) =
ek
In Leitern sitzt die Ladung in einer sehr dünnen Schicht auf der Leiteroberfläche S verteilt:
Te
ch
nis
∂~r
∂~r σ(~r) d a = σ(~r(u, v))
×
dudv
∂u ∂v ist die im (Ober-) Flächenelement d a enthaltene differentielle Ladung d Q, sodass
ˆ
σ(~r) d a = Q(S)
S
uh
l
für
für beliebige Flächenstücke S die enthaltene Ladung ergibt.
hr
st
1.6.3. Gaußsches Gesetz für Ladungsverteilungen (in integraler Form)
∂V
V
c
Le
~ r), sodass für
(i) Raumladungsverteilung ρ(~r) erzeugt ein D(~
beliebige Kontrollvolumina V mit der Hüllfläche ∂V gilt:
ˆ
ˆ
~ d ~a = Q(V ) =
D
ρ(~r) d3 r
(1.20)
18
1 ELEKTROSTATIK
1.6 Kontinuierliche Ladungsverteilungen
S∩V
ch
e
∂V
n
~ r) mit der
(ii) Die (Ober-) Flächenladungsverteilung σ(~r) auf eine Fläche S erzeugt ein D(~
Eigenschaft:
ˆ
ˆ
~
σ(~r) d a
(1.21)
D d ~a = Q(V ∩ S) =
für jedes Gebiet V, das eine Leiteroberfläche S schneidet.
S
S
M
(1.22)
tro
ph
ys
und damit gilt auf der Leiteroberfläche außerhalb des
Leiters
~ ·N
~ =σ
D
ik
S
-T
U
Man betrachtet eine Leiteroberfläche S mit der
~ . Im Leiter gilt D
~ = 0. Dann gilt:
Oberflächennormalen N
ˆ
ˆ
ˆ
~
~
~
σda
D d ~a =
D · N da =
ün
Spezialfall:
ek
1.6.4. Gaußsches Gesetz in differentieller Form
El
(i) Nach Gleichung (1.20) gilt für beliebige Kontrollvolumina V
ˆ
ˆ
~
D d ~a = Qeing =
ρ d3 r.
Te
ch
nis
Nach Gleichung (A.30) ist
also
V
ch
e
∂V
ˆ
ˆ
~ d ~a =
D
∂V
~ d3 r,
div D
V
ˆ
ˆ
~ d3 r =
div D
V
ρ d3 r
V
Daraus folgt das Gaussche Gesetz in differntieller Form:
für
~ =ρ
div D
(1.23)
hr
st
uh
l
~ ein Gradientenfeld: E
~ = − grad Φ. Dann gilt mit D
~ = E
~ die
(ii) In der Elektrostatik ist E
Poissongleichung
div( grad Φ) = −ρ,
(1.24)
bwz. in »Nablaschreibweise«:
Le
∇(∇Φ) = −ρ
c
(iii) Ist überdies nicht ortsabhängig, gilt
div(grad Φ) = −
ρ
oder mit dem Laplace-Operator
div(grad Φ) =: ∆Φ
19
1.6 Kontinuierliche Ladungsverteilungen
1 ELEKTROSTATIK
ergibt sich die sog. Laplace-Gleichung:
ρ
(1.25)
∂2
∂x2
+
∂2
∂y 2
+
∂2
∂z 2
)
ün
(In kartesischen Koordinaten gilt: ∆ =
ch
e
n
∆Φ = −
-T
U
M
(iv) Durch »Lösen« von Gleichung (1.25) kann man zu gegebenen ρ(~r) das hiervon erzeugte
Potential Φ(~r) bestimmen:
ρ
Φ = » − ∆−1 ( ) «
Der Operator ∆−1 ist ein Integraloperator, der von dem Gebiet Ω ⊂ E3 abhängt und von
Randbedingungen, die Φ auf ∂Ω erfüllen muss, d.h.
ρ
tro
∆Φ = −
ph
ys
ist nur dann eindeutig ausführbar, wenn neben
ik
ρ
ρ 7→ −∆−1 ( ) = Φ
(=vorgegebenes Potential)
Te
ch
nis
∂Ω
ch
e
• Dirichlet-Randbedingung:
Φ (~r) = Φ0 (~r)
El
ek
auch die Randbedingungen an Φ auf ∂Ω als Bestimmungsgleichungen spezifiziert sind (sog.
Randwertproblem).
Mathematisch korrekte Randbedingungen sind die
(1.27)
für
• oder die Neumann-Randbedingung:
∂Φ ~ · ~n) (=vorgegebene Normalenableitung)
(~r) = E0 (~r) (= −E
∂n ∂Ω
(1.26)
hr
st
uh
l
• oder gemischte Randbedingung:
∂Φ (~r) = B0 (~r)
α(~r)Φ (~r) + β(~r) ·
∂n ∂Ω
∂Ω
Gleichung (1.28) wird auch oft »Cauchy-Randbedingung« genannt.
Anschaulich bedeutet Gleichung (1.26), dass man »Klemmenpotentiale« vorgibt. Bei Gleichung (1.27) gibt man wegen
∂Φ
~ · ~n = −σ(~r)
= −D
∂n
die Oberflächenladung vor.
Le
c
(1.28)
20
1 ELEKTROSTATIK
1.6 Kontinuierliche Ladungsverteilungen
1.6.5. Lösung der Poissongleichung im unbeschränkten E3 (Coulombpotential)
(i) Nach Gleichung (1.15) ist
n
n
X
1
qi
·
4π0
|~r − ~ri |
ch
e
Φ(~r) =
i=1
M
ün
das von der diskreten Ladungsverteilung (qi , ~ri )1...N erzeugte elektrische Potential.
Φ(~r) löst also die Poissongleichung (1.24) in E3 \ {P1 . . . PN }, wenn Pi = 0 + ~ri .
E3 hat keinen Rand, dennoch erfüllt Φ(~r) für |~r| → ∞ die Randbedingung Φ(~r) → 0.
ΦMono (~r) =
1
q0
4π |~r − r~0 |
1
|~r − ~r0 |
ph
ys
q
ρ(~r) = −∆ΦMono (~r) = − ∆~r
4π
ik
also hat eine Punktladung die Raumladungsdichte
-T
U
(ii) Bemerkung: Für N = 1 erhalten wir das Monopolpotential
.
ek
tro
Um dieser Beziehung einen mathematischen Sinn zu geben, muss man die »Delta-Distribution«
δ(~r − ~r0 ) einführen, die durch die Rechenvorschrift
ˆ
∞
∀f ∈ C (Ω) :
δ(~r − ~r0 )f (~r) d3 r = f (~r0 )
Ω
ch
e
El
definiert ist. Dann ist ρ0 (~r) = q0 · δ(~r − ~r0 ) und es gilt
1
∆~r
= −4π · δ(~r − ~r0 )
|~r − ~r0 |
(1.29)
Te
ch
nis
Gleichung (1.29) ist eine verallgemeinerte Ableitung im »Distributionssinn«.
Daher ist
1
1
·
~r → −
4π |~r − ~r0 |
die Fundamentallösung zu ∆:
uh
l
für
∆~r :
1
1
= δ(~r − ~r0 ).
∆ −
·
4π |~r − ~r0 |
c
Le
hr
st
(iii) Gesucht sei nun ein Φ(~r) zu der kontinuierlichen Ladungsträgerverteilung ρ(~r).
d Q(~r) = ρ(~r) d3 r ist die im Volumen d3 r um den Punkt ~r enthaltene Ladung. Wir stellen uns
vor, dass ρ(~r) durch eine quasikontinuierliche, diskrete Ladungsträgerverteilung (qi , ~ri )i=1...N
mit N → ∞ entstanden ist. Dann gilt:
ˆ X ~ri Parameter qi →
~rParameter ρ(~r) d3 r
Ω
i
Für Gleichung (1.15) bedeutet dies:
1
Φ(~r) =
4π
ˆ
E3
ρ(~r0 ) 3 0
d r
|~r − ~r0 |
21
(Coulombpotential)
(1.30)
1.6 Kontinuierliche Ladungsverteilungen
1 ELEKTROSTATIK
Gleichung (1.30) löst ∆Φ = − ρ im E3 , weil es das von ρ(~r) erzeugte elektrostatische Potential
ist. Es erfüllt die Randbedingung Φ(~r) → 0 für |~r| → ∞.
1
|~r − ~r0 |
=−
ch
e
ün
E3
∂ρ(~r0 ) 3 0
d r.
∂~r |~r − ~r0 |
~r − ~r0
|~r − ~r0 |3
Somit ergibt sich das sog. Coulombintegral:
ˆ
~r − ~r0
~ r) = 1 ·
ρ(~r0 ) d3 r
E(~
4π E3 |~r − ~r0 |3
M
Nebenrechnung:
∂
∂~r
ˆ
-T
U
~ r) = − grad Φ(~r) = − 1
E(~
4π
n
~ r) berechnen:
(iv) Hieraus kann man das von ρ(~r) in E3 erzeugte elektrische Feld E(~
(1.31)
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
tro
ph
ys
ik
Gleichung (1.31) kann man auch direkt aus (1.3) und der Substitutionsregel gewinnen.
22
1 ELEKTROSTATIK
1.7 Elektrische Felder zwischen leitenden Medien
1.7. Elektrische Felder zwischen leitenden Medien
ch
e
n
1.7.1. Influenz
~ = −∇Φ = 0
E
⇔
|{z}
C
Φ = constans
~ d~
E
r=0
-T
U
´
M
ün
(i) In einem Leiter sind sehr viele frei bewegliche Ladungsträger vorhanden (≈ 1021 - 1023
Elementarladungen pro cm3 ). Als Konsequenz der dielektrischen Abschirmung gibt es keine
Raumladung und daher sind Leiter Äquipotentialflächen.
ik
.
ph
ys
(ii) Wird ein Leiter einem äußeren Feld ausgesetzt, so wird durch die Ladungsträgerverschiebung
eine Oberflächenladung induziert, sodass
tro
~ = 0 im inneren des Leiters
a) E
El
ek
~ ⊥ äußere Leiteroberfläche
b) E
Te
ch
nis
ch
e
~ ·N
~ = σ auf der Leiteroberfläche (durch den Grenzwert von außen)
c) D
++
+
+
++
für
- --
hr
st
uh
l
Abb. 6: Influenz
c
Le
1.7.2. Elektrische Kapazität
(i) Definition der Kapazität
Man betrachtet zwei Leiter mit unterschiedlichem elektrischen Potentialen Φ1 und Φ2 . Mit
der Spannung U12 zwischen den beiden Leitern und der Ladung Q auf Leiter 1 (siehe Bild)
ˆ
L2
U12 = Φ1 − Φ2 =
ˆ
~ d ~r,
E
L1
~ d ~a
D
Q=
H
23
um
L1
1.7 Elektrische Felder zwischen leitenden Medien
1 ELEKTROSTATIK
!
! (r ) = !2
n
Leiter 1
ün
E = −∇Φ
M
Ladung + Q
Ladung - Q
-T
U
!
! ( r ) = !1
ch
e
Leiter 2
hier : !1 > ! 2
ik
Abb. 7: Kapazität
C=
Es gilt:
ph
ys
folgt für die Kapazität:
Q
U12
tro
´
(1.32)
~ d ~a
E
C = ´HL12
~ d ~r
E
ek
(1.33)
L1
El
Wie man aus den obigen Gleichungen leicht erkennt, ist die Kapazität eine Funktion von ~ ab.
und der Geometrie (C = f (, Geometrie)), und hängt somit nicht von E
ˆ
U12 =
2
Te
ch
nis
ch
e
(ii) Plattenkondensator:
Man betrachtet, ähnlich wie oben, zwei leitende, senkrecht,
nebeneinander angeordnete Platten. Die linke Platte 1 ist
mit +Q, und die rechte Platte 2 mit −Q geladen. Außerdem
berücksichtigt man eine Näherung, nämlich die Vernachlässigung der Streufelder.
ˆ
~ d ~r =
E
ˆ
Q=
Ez ~ez ~ez d z = Ez · d
ˆ
~ d ~a =
D
uh
l
H1
Ez ~ez ~ez d x d y = · Ez · A
H1
z
hr
st
Daraus ergibt sich für die Kapazität eines Plattenkondensators folgende Gleichung:
Le
−Q
0
für
1
Q
d
C=
A
Q
=·
U12
d
(1.34)
Fläche A
Plattenabstand d
E = E2 ez
c
Abb. 8: Plattenkondensator
Wieder gilt die wichtige Tatsache, dass die Kapazität nicht
~ abhängt. Die Flächenladungsdichte σ = D
~ ·N
~ = Q
von E
A
ist konstant.
24
1.7 Elektrische Felder zwischen leitenden Medien
Q
M
-T
U
E(r) =
-Q
Feld: E = E r ⋅ er
()
ph
ys
ik
a≤r≤b
Abb. 9: Kugelkondensator
Q
a·b
= 4π
Uab
b−a
tro
Uab
ˆ b
Q
1
=
·
dr
4π a r2
Q b−a
1
=
·
b
4π
ab
D
b
|~
r|=r
Q
1
· 2
4π · r
ˆ b
=
E(r) d r
a
1
Q
·
−
=
4π
a
a
ch
e
n
(iii) Kugelkondensator:
Hier betrachtet man eine mit der Ladung Q geladenen
inneren kugelförmigen Leiter mit Radius a und eine
äußere leitende Kugelschale mit der Ladung -Q und
Radius b. Zwischen den beiden Anordnungen liegt ein
Dielektrikum mit der Permittivität .
Für a < r < b gilt:
ˆ
~ d ~a = · E(r)4πr2
Q=
D
ün
1 ELEKTROSTATIK
⇒
1.7.3. Kondensatoraggregate
ch
e
El
ek
C=
Te
ch
nis
(i) Paralellschaltung:
Gegeben ist eine parallele Zusammenschaltung von Kondensatoren (Ci )i=1...N , dessen Ladungen (+Qi , −Qi )i=1...N jeweils verschieden sind. Die Spannung U liegt an allen Kondensatoren
gleichermaßen an. Es gilt
Qi = Ci · U ⇒ Qtotal =
N
X
Qi = U ·
Ci
i=1
c
Le
hr
st
uh
l
für
i=1
N
X
Abb. 10: Parallelschaltung von Kondensatoren
Daraus ergibt sich eine Ersatzkapazität Cp für die Parallelschaltung:
N
Qtotal X
Cp =
=
Ci
U
i=1
25
(1.35)
1 ELEKTROSTATIK
N
N
N
i=1
i=1
i=1
ch
e
(ii) Serienschaltung:
Gegeben ist eine serielle Zusammenschaltung von Kondensatoren (Ci )i=1...N , dessen Ladungen (+Qi , −Qi )i=1...N jeweils gleich sind, d.h. Qi = Q ∀i = 1, ..., n. Die Gesamtspannung U
der Serienschaltung teilt sich hierbei auf die einzelnen Teilspannungen (Ui )i=1...N , die an den
Kondensatoren anliegen, auf. Es gilt:
tro
ph
ys
ik
-T
U
M
ün
X
X 1
XQ
Q
⇒ U=
=Q
Ui =
Ui =
Ci
Ci
Ci
ch
e
El
ek
Abb. 11: Serienschaltung von Kondensatoren
Te
ch
nis
Daraus ergibt sich der Kehrwert einer Ersatzkapazität Cs für die Serienschaltung:
N
X 1
1
=
Cs
Ci
(1.36)
i=1
c
Le
hr
st
uh
l
für
(iii) Parallele dielektrische Medien:
Man betrachtet einen Plattenkondensator mit dem Plattenabstand d, und zwei parallel angeordneten Dielektrika mit den Permittivitäten 1 und 2 . Die Plattenflächen, die zu den
jeweiligen Dielektrika gehören, werden im Folgenden mit A1 und A2 und die am Kondensator anliegende Spannung mit U bezeichnet. Dabei gilt:
ˆ
~ d ~s ⇒ |E
~ 1 | = U = |E
~ 2|
U= E
d
Qi = σi · Ai ,
~ 1 | = 1 · U und σ2 = |D
~ 2 | = 2 · U
mit σ1 = |D
d
d
Gesamtladung: Q = Q1 + Q2 = σ1 A1 + σ2 A2 =
26
n
1.7 Elektrische Felder zwischen leitenden Medien
U
(1 A1 + 2 A2 )
d
1.7 Elektrische Felder zwischen leitenden Medien
M
ün
ch
e
n
1 ELEKTROSTATIK
-T
U
Abb. 12: Parallele dielektrische Medien
Daraus ergibt sich folgende Gleichung für die Kapazität der gesamten Anordnung:
Q
1 A1 2 A2
=
+
U
d
d
(1.37)
ph
ys
ik
C=
ek
tro
(iv) Serielle dielektrische Medien:
Hier betrachtet man zwei seriell angeordnete Dielektrika (1 , 2 ), an denen insgesamt eine
Spannung U angelegt wird. Dann gilt:
~ 1 | = |σtop | = Q
|D
A
~ 1 | = |D
~ 2| = Q
⇒
|
D
Q
~ 2 | = |σbottom | =
A
|D
A
~ d ~s mit Materialgesetz: D
~ i = i E
~i
E
ch
e
U=
El
ˆ
Te
ch
nis
dˆ
d1
d1 +d2
1 +d2
ˆd1 ~
~2
~ 1| ˆ
~ 2|
~ 2| ˆ
~ 1|
D1
D
|D
|D
|D
|D
U = U1 + U2 =
d ~s +
d ~s =
d1 +
d2
dz +
dz =
1
2
1
2
1
2
0
d1
d1
σ top
c
Le
hr
st
uh
l
für
0
σ bottom
Abb. 13: Serielle dielektrische Medien
Daraus ergibt sich eine Ersatzkapazität C, mit folgender Gleichung:
C=
Q
=
U
d1
1
A
+
d2
2
(1.38)
Aus Gleichung (1.38) sieht man, dass sich die serielle Anordnung von Dielektrika wie eine
27
1.7 Elektrische Felder zwischen leitenden Medien
1 ELEKTROSTATIK
Serienschaltung von Kondensatoren verhält:
−1
ün
ch
e
⇒ C=
1
1
+
C1 C2
n
2 A
und C2 =
d2
1 A
C1 =
d1
M
1.7.4. Elektrische Feldenergie
2
ˆ
~ d ~s = ∆Q ·
∆Qtrans · E
~ d ~s = ∆Q · U (Q)
E
1
d Wel
=U
dQ
⇒
2
Te
ch
nis
ch
e
El
ek
tro
1
ik
1
2
ph
ys
ˆ
∆Wel = −
-T
U
(i) Energie eines aufgeladenen Kondensators:
1 und eine mit −Q geladenen Leiter .
2 Um
Man betrachtet einen mit +Q geladenen Leiter 1 nach 2 zu bringen, muss für die Arbeit gelten:
die Ladung ∆Qtrans = −∆Q < 0 von Abb. 14: zwei geladene Leiter
für
Somit ergibt sich für die geleistete elektrische Arbeit folgende Gleichung:
ˆ
Wel =
Q
U (Q0 ) d Q0
0
hr
st
uh
l
Als einen Spezialfall kann man einen (Platten-) Kondensator betrachten. Hier gilt:
ˆ
Wel =
0
Q
Q0
1 Q2
1
1
d Q0 = ·
= · C · U2 = · U · Q
C
2 C
2
2
Wel =
1
1
1 Q2
· U · Q = · C · U2 = ·
2
2
2 C
c
Le
Daraus ergibt sich, geltend für jeden idealen Kondensator, folgende Gleichung:
28
(1.39)
1 ELEKTROSTATIK
1.7 Elektrische Felder zwischen leitenden Medien
(ii) Energiedichte des elektrischen Feldes:
n
S. 25_2
1 ~
1
~ · A = 1 · |E|
~ · |D|
~ ·V
· U · Q = · |E|
· d · |D|
↑ 2
2
2
ch
e
Wel =
Q
ün
Plattenkondensator
A
M
G
E
d
Elektrische Energiedichte: wel =
-T
U
−Q
Wel
1 ~
~ = · |E|
~ 2 = 1 · |D|
~ 2
= · |E|
· |D|
V
2
2
2
1 ~
~ = 1 ·E
~ ·D
~
· |E| · |D|
2
2
ph
ys
wel =
ik
~ = εE)
~ gilt:
Im Fall linearer Medien (D
tro
Für die im Volumen V gespeicherte elektrische Energie gilt dann:
ˆ
Wel =
wel · d V
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
V
29
(1.40)
2 STATIONÄRE STRÖME
2. Stationäre Ströme
ch
e
n
2.1. Stromstärke, Stromdichte
(i) Strom:
S. 26_1
(2.1)
C
= 1 Ampere = 1A
s
M
Einheit: 1
d QA
dt
ün
IA = I(A) =
∆QA
ph
ys
ik
⊕
⊕
⊕
⊕
(ii) Stromdichte:
für A → 0 , »A ⊥ Stromfluss«
El
I(A)
A ,
ek
tro
A
• |~j| =
-T
U
Achtung: Einheit A 6= Fläche A !
ch
e
• Richtung von ~j = Tangente an Ladungsflusslinien (Ladungstrajektorien)
A
A
• Einheit: m
2
cm2
Te
ch
nis
S. 26_2
Durch eine differentielle Fläche d ~a fließt pro Zeiteinheit d t die Ladung
~ ) d a d t = ~j d ~a d t
d Q = (~j · N
G
G
für
da = N ⋅ d a
G
hr
st
uh
l
j
c
Le
Aus der elektrischen Stromdichte j (lokale Größe) kann durch Flächenintegration der elektische Strom I durch eine Kontrollfläche berechnet werden:
d IA = ~j d ~a
ˆ
~j d ~a
=⇒
IA =
A
30
(2.2)
2 STATIONÄRE STRÖME
2.1 Stromstärke, Stromdichte
(iii) Zusammenhang mit Raumladungsdichte ρ
ch
e
n
ρ(~r) = q · n(~r)
M
n : Trägeranzahl/Volumen, Teilchendichte, Konzentration
ün
q: Ladung eines Trägers
ρ(~r) =
X
qi ni (~r)
i
d V = d ~a d ~r = ~v d ~a d t
~ da
d ~a = N
ph
ys
differentielles Volumenelement:
ik
Geschwindigkeit der Träger : ~v
-T
U
Mit mehreren Trägersorten:
diff. Flächenelementder Kontrollfläche:
d ~r = ~v d t
ek
tro
diff. Ortsänderung der Träger in Zeit dt :
Te
ch
nis
ch
e
El
d r = vdt
N
v
für
da
dQ
hr
st
uh
l
Die im Volumen d V befindlichen Ladungsträger sind genau die, die in der Zeit d t die Kontrollfläche d ~a passiert haben:
d Q = q · n · d V = ~j · d ~a · d t = q · n · ~v · d ~a d t
|{z}
| {z }
=ρ
=~j
c
Le
Also:
~j = q · n · ~v = ρ · ~v (bei einer Trägersorte)
(2.3)
Im Fall mehrere Trägersorten (mit ~ji = qi · ni · ~vi ) folgt:
~j =
N
X
i=0
31
qi · ni · ~vi
(2.4)
2.2 Ladungsträgertransport im elektrischen Feld
2 STATIONÄRE STRÖME
2.2. Ladungsträgertransport im elektrischen Feld
2.2.1. Transport ohne Stoßprozesse (Vakuum)
n
d ~v
~ r)
= F~el = q · E(~
dt
ch
e
Ein Ladungsträger: m · ~a = m ·
t1
ˆt2
ˆt2
ˆt2
~ · ~v · d t =
q·E
t1
d ~r
· dt
dt
t1
t1
1
d v2
·m·
dt =
2
dt
q·E·
-T
U
d ~v
m~v ·
dt =
dt
ˆP2
~ · d ~r
q·E
ik
ˆt2
M
ün
Durch Multiplikation des Kräftegleichgewichts mit ~v und Integration über das Zeitintervall [t1 , t2 ]erhält
man:
El
ek
tro
ph
ys
P1
Daraus ergibt sich mit Gleichung der sogenannte Energiesatz:
ch
e
1
· m · (v22 − v12 ) = q · U12
2
r
2q √
v(U ) =
· U , wenn v(0) = 0
m
Te
ch
nis
(2.5)
2.2.2. Transport mit Stoßprozessen
~
mittlere (Drift-) Geschwindigkeit: ~v = ~v (E)
mit der effektiven Masse m∗
und der mittleren Stosszeit τ
~ = m∗ ·
linearer Ansatz: q E
c
Le
hr
st
uh
l
für
(i) Beweglichkeit: Es gibt viele Ladungsträger, die an den Streuzentren abgebremst werden.
Deshalb betrachtet man das Geschehen statistisch über viele Stoßprozesse:
=⇒
~v =
∆~v
∆t
= m∗
q·τ ~
~
· E = sgn(q) · µ · E
m∗
mit der Beweglichkeit µ > 0.
32
~v
τ
(2.6)
2 STATIONÄRE STRÖME
2.2 Ladungsträgertransport im elektrischen Feld
Daraus folgt für die Stromdichte bei einer Trägersorte:
n
~
~j = q · n · ~v = q · n · sgn(q) · µ · E,
ch
e
also:
~
~j = |q| · n · µ · E
(2.7)
N
X
M
~j =
ün
bzw. für mehrere Trägersorten:
~
|qi | · ni · µi · E
vdrift
ik
vdrift + v0
(2.8)
-T
U
i=1
vdrift + v0
tro
ph
ys
v0 < 0
ek
(ii) Ohmsches Gesetz: In jedem Fall gilt das “Ohmsche Gesetz in lokaler Form”:
~
~j = σ · E
El
(2.9)
Te
ch
nis
ch
e
wobei
σ=
N
X
|qi |ni µi
i=1
als die spezifische, elektrische Leitfähigkeit bezeichnet wird, mit folgender Einheit:
dim σ = 1
S
A
=1 ,
Vm
m
mit 1S =
1
Ω
für
(iii) Ohmsches Gesetz in integraler Form:
Voraussetzungen:
uh
l
• homogener Querschnitt A
hr
st
• homogene Leitfähigkeit σ
Le
• Länge l
c
Spannung U12
Φ2
Klemmen potential
G
G
j =σE
Strom Ι
Φ1 Klemmenpotential
33
S. 29
2.2 Ladungsträgertransport im elektrischen Feld
~ = U12 und I =
|E|
l
ˆ
~ d ~a = σ · |E|
~ ·A
σE
~j d ~a =
A
A
ch
e
A
· U12
l
ün
⇒I =σ·
ˆ
n
U12 = Φ1 − Φ2 > 0
2 STATIONÄRE STRÖME
M
Daraus ergeben sich folgende wichtige Gleichungen:
ρ·l
l
=
σ·A
A
1
ρ=
σ
1
G
(2.12)
(2.13)
ph
ys
R=
tro
(2.14)
dim(R) = 1 V
A = 1Ω
ek
R: elektrischer Widerstand
dim(G) = 1S
El
G: elektrischer Leitwert
dim(ρ) = 1Ωm, oft auch 1Ω mm
m
ch
e
ρ: spezifischer elektrischer Widerstand
Te
ch
nis
σ: spezifische elektrische Leitfähigkeit
(iv) Schaltungssymbol, Zählpfeilrichtung:
U = R · I, Φ2 > Φ1
c
Le
hr
st
uh
l
für
(2.11)
ik
U12 = R · I, mit R =
(2.10)
-T
U
I = G · U12
A
G=σ·
l
34
2
2 STATIONÄRE STRÖME
2.3 Ladungserhaltung
ˆ
für jedes Kontrollvolumen V gilt:
~j d ~a = − Q(V )
dt
(2.15)
-T
U
∂V
ün
(„Version ohne Eintrittspunkte“)
S. 30
M
(i) Integrale Darstellung (allgemein gültig)
ch
e
n
2.3. Ladungserhaltung
tro
ph
ys
ik
G
j
El
ek
∂V
Hüllfläche
Kontrollvolumen V
Te
ch
nis
ch
e
Gleichung (2.15) wird oft als »Ladungsbilanzgleichung« bezeichnet. Für den stationären Fall
gilt:
d
=0”
“
dt
Das heißt, Q(V ) ist zeitlich konstant. Daraus folgt für jede beliebige Hüllfläche ∂V :
ˆ
~j d ~a = 0
uh
l
für
∂V
c
Le
hr
st
(ii) Kirchhoffsche Knotenregel
ˆ
~j d ~a
IK =
Ak
ˆ
~j d ~a =
0=
N ˆ
X
~j d ~a =
k=1A
k
∂V
N
X
Ik
k=1
Daraus ergibt sich folgende Gleichung für die Summe aller Ströme in einem Knotenpunkt:
N
X
k=1
35
IK = 0
(2.16)
2.4 Schaltungen mit Widerständen
2 STATIONÄRE STRÖME
A1
I1
A2
n
I2
ch
e
A3
I3
ün
AN −1
-T
U
M
I N-1
(iii) Ladungserhaltung in differentieller Form:
Q(V ) =
V
ˆ
ˆ
3
ρ(~r, t) d r =
ˆ
div ~j d3 r
V
ek
∂V
(II)
tro
~j d ~a =
(I)
V
V
ˆ
∂ρ
(~r, t) d3 r
∂t
ik
d Q(V )
d
ρ(~r, t) d r ⇒
=
dt
dt
3
ph
ys
ˆ
V
ch
e
El
Aus (I) und (II) folgt mit Gleichung 2.15
ˆ
ˆ
∂ρ 3
3
~
div j d r +
d r=0
∂t
V
Te
ch
nis
⇒ für alle Kontrollvolumen V :
ˆ ∂ρ
d3 r = 0
div ~j +
∂t
V
Daraus ergibt sich die sog. “Ladungskontuinitätsgleichung”, oder “Ladungsbilanzgleichung”:
∂ρ
=0
∂t
(2.17)
für
div ~j +
uh
l
2.4. Schaltungen mit Widerständen
c
Le
hr
st
(i) Serienschaltung:
Eine Reihenschaltung von N Widerständen (Ri )i=1...N kann zu einem Gesamtwiderstand Rges
zusammengefasst werden. Das Verhalten an den Klemmen der gesamten Serienschaltung, und
denen des Ersatzwiderstandes ist somit äquivalent.
U=
N
X
i=1
Ui =
N
X
Ri · I = I ·
i=1
N
X
Ri = I · Rges
i=1
Daraus ergibt sich folgende Gleichung für den Ersatzwiderstand Rges der Serienschaltung:
Rges =
N
X
i=1
36
Ri
(2.18)
2.4 Schaltungen mit Widerständen
n
2 STATIONÄRE STRÖME
ün
ch
e
R
M
Abb. 15: Serienschaltung von Widerständen
Ii =
i=1
N
N
X
X
U
1
U
=U·
=
Ri
Ri
Rges
i=1
i=1
ik
N
X
ph
ys
I=
-T
U
(ii) Parallelschaltung:
Wie bei der Serienschaltung kann auch eine parallele Verschaltung der Widerstände (Ri )i=1...N
zu einem Gesamt- oder Ersatzwiderstand Rges zusammengefasst werden:
tro
Folgende Gleichung gilt somit für den Kehrwert des Ersatzwiderstandes Rges einer Parallelschaltung:
N
X
1
1
=
(2.19)
Rges
Ri
ek
i=1
El
Es kann also über die Summe der elektrischen Leitwerte der Gesamtleitwert
ch
e
Gges =
N
X
und daraus der Ersatzwiderstand
Te
ch
nis
Gi ,
i=1
Rges =
1
Gges
I
I1
R1
I2
IN
R2
U
Abb. 16: Parallelschaltung von Widerständen
c
Le
hr
st
uh
l
für
U
I
37
R
2.5 Elektrische Leistung und Energieübertragung
2 STATIONÄRE STRÖME
ch
e
n
2.5. Elektrische Leistung und Energieübertragung
ik
-T
U
M
~ · d ~r (=Arbeit, die das elektrische System leistet)
d Wel = F~ d ~r = q · E
ün
(i) Leistungsbegriff allgemein:
d Wel
~ · d ~r = q · E
~ · ~v
=q·E
dt
dt
tro
Pel =
ph
ys
Für einen Ladungsträger gilt:
Allgemein: K verschiedene Ladungsträgersorten (Spezies):
ek
qi (Leistungsumsatz pro Träger der Sorte α)
(2.20)
ch
e
El
(α)
~
Pel = qα · ~vα · E
Te
ch
nis
(ii) Leistung bei bewegter Raumladungsdichte
~j =
K
X
~jα =
α=1
K
X
qα · nα · ~vα
α=1
für
(vgl. Gleichung 2.6, mit mittlere Driftgeschwindigkeit vα und Ladungsträgerdichte nα )
Def. der elektrischen Leistungsdichte: Durch Gleichung (2.20) gelangt man zu:
uh
l
pel =
K
X
α=1
(α)
nα · Pel =
K
X
!
nα · qα · ~vα
~ = ~j · E
~
·E
α=1
hr
st
Damit gilt allgemein für die Leistungsdichte pel in einem Leiter
~
pel = ~j · E
(2.21)
Le
(Verlust)leistungsdichte nei ohmscher Driftbewegung:
c
~
~j = σ ·E
|{z}
>0
=⇒
~ = σ · |E|
~ 2 = 1 · |~j|2 > 0
pel = ~j · E
σ
38
(2.22)
2 STATIONÄRE STRÖME
2.5 Elektrische Leistung und Energieübertragung
(iii) Verlustleistung am ohmschen Widerstand: In integraler Form gilt:
ch
e
n
U =R·I
ün
jE
-T
U
M
Man berechnet die elektrische Leistung Pel durch das Volumenintegral über die elektrische
Leistungsdichte pel :
ˆ
~ ·L
pel (~r) d3 r = pel · L · A = |~j| · A · |E|
Pel =
V
U2
= R · I2
R
ph
ys
Pel = U · I =
ik
~ · L, ist Pel mit folgender Gleichung gegeben:
Da I = |~j| · A, und U = |E|
(2.23)
ch
e
El
ek
(iv) Die elektrische Übertragungsstrecke:
tro
Die Einheit der elektrischen Leistung ist dim(Pel ) = 1VA = 1 W(att).
für
Te
ch
nis
Man betrachtet eine Energiequelle, die über einen im “Hinleiter” geschalteten Widerstand RL ,
und einen als “Rückleiter” verwendeten, idealisiert widerstandslos angenommenen Draht, mit
einem Energieverbraucher verbunden ist. Es sei UE die Spannung an der Energiequelle, UV
die Spannung, die am Verbraucher “ankommt”. Der Strom I fließe im Hin- und Rückleiter.
Dann gilt für die erzeugte Leistung PE und für die verbrauchte Leistung PV :
erzeugte Leistung:PE = UE · I
verbrauchte Leistung:PV = UV · I
η=
PV
UV
UE − RL · I
RL · I · UE
=
=
=1−
PE
UE
UE
UE2
⇒η =1−
RL · I · UE
UE2
c
Le
hr
st
uh
l
Da UV = UE − RL · I gilt für den Übertragungswirkungsgrad η:
39
(η → 1 für UE → ∞)
(2.24)
3 MAGNETOSTATIK
n
3. Magnetostatik
ün
ch
e
3.1. Kräfte auf bewegte Ladungen im Magnetfeld
(i) Die Lorentzkraft:
M
~
F~L = q(~v × B)
-T
U
a) [~v :] Geschwindigkeitsvektor der bewegten Ladung q
(3.1)
~ magnetische Kraftflussdichte, oder magnetische Induktion, oder »B-Feld«
b) [B:]
Vs
N
N
= 2 = 1T(esla)
=
As ms
Am
m
ch
e
El
ek
tro
~ =
dim B
ph
ys
~
Einheit von B:
ik
c) [F~L :] Kraft, die auf die bewegte Ladung wirkt
Te
ch
nis
Abb. 17: Lorentzkraft
(ii) Superpositionsprinzip ergibt die elektromagnetische Kraft:
~ + ~v × B)
~
F~em = q · (E
d Wmag
Pmag
= F~L · d ~r = q
d Wmag
=
=q
dt
d ~r
~
×B
dt
d ~r
~
×B
dt
· d ~r
·
d ~r
=0
dt
hr
st
uh
l
für
(iii) Leistung im B-Feld:
(3.2)
d
dt
1
· m · ~v 2
2
=
1
d ~v
· m · 2 · ~v ·
= ~v · F~L = 0
2
dt
⇒ |~v | = const.
c
Le
⇒ Das Magnetfeld leistet also keine Arbeit!
Erhaltung kinetischer Energie:
(iv) Bewegung eines geladenen Massepunktes im konstanten Magnetfeld:
m·
d ~v
~
= q ~v × B
dt
40
(3.3)
3 MAGNETOSTATIK
3.1 Kräfte auf bewegte Ladungen im Magnetfeld
d vy
d vz
d vx
= q · B · vy ∧ m ·
= −q · B · vx ∧ m ·
=0
dt
dt
d{zt
|
}
(I)
M
⇒m·
ün
ch
e
n
Zuerst wird die gewöhnliche Differentialgleichung 1.Ordnung (3.3) nach der Geschwindigkeit
~v (t) aufgelöst, um anschließend durch Integration der Lösung, den Ort ~r(t) herzuleiten. Wird
~ = B · ~ez gewählt, gilt:
o.B.d.A. B
~e ~e ~e x y z ~ = B~e ⇒ ~v × B
~ = ~vx ~vy ~vz = B · (vy ~ex − vx~ey )
B
z
0 0 B -T
U
vz =const.=vk
Da
~v 2 = vx2 + vy2 +vz2 = v02 = const. und vz2 = vk2 = const.
| {z }
ik
2 =const.
v⊥
ph
ys
kann man die Vermutung aufstellen, dass
~v⊥ (t) = vx (t) · ~ex + vy (t) · ~ey
tro
eine gleichförmige Kreisbewegung ist. Somit ergibt sich folgender Ansatz für die Lösung der
Differtialgleichung (3.3):
ek
vx (t) = v⊥ · sin (Ω(t − t0 ))
ch
e
El
vy (t) = v⊥ · cos (Ω(t − t0 ))
Te
ch
nis
vz
Ω
! = " (t # t0 )
v(t)
vx
Abb. 18: Bewegung im homogenen Magnetfeld
hr
st
uh
l
für
vy
a) m · v⊥ · Ω · cos (Ω(t − t0 )) = q · B · v⊥ · cos (Ω(t − t0 ))
Durch einen Vergleich der Koeffizienten des Kosinus, erhält man aus der Gleichung
c
Le
Einsetzen des Ansatzes in die Gleichung (I) ergibt:
m·Ω=q·B
die Gyrationsfrequenz Ω mit
Ω=
41
q·B
.
m
(3.4)
3.1 Kräfte auf bewegte Ladungen im Magnetfeld
3 MAGNETOSTATIK
ch
e
Das nächste Ziel ist die Trajektorie (Bahnkurve) im Ortsraum E3 . Diese erhält man durch
Integration der Geschwindigkeit ~v (t) über die Zeit t:
ün
ˆt
~v (τ ) d τ + ~r0
M
~r(t) =
t0
t0
ik
t0
-T
U
t
ˆ
ˆt
= ~r0 + v⊥ sin (Ω(τ − t0 )) d τ · ~ex + cos (Ω(τ − t0 )) d τ · ~ey + vk · ~ez · (t − t0 )
tro
ph
ys
Die Trajektorie kann also im E3 mit folgender Gleichung nach der
Zeit t beschrieben werden:
1
~r(t) = ~r0 − v⊥ · Ω · (cos ϕ(t) − 1) · ~ex − sin(ϕ(t)) · ~ey + vk (t − t0 ) · ~ez
B
und
Ω=
q·B
;
m
ch
e
ϕ(t) = Ω(t − t0 )
El
ek
mit den Substitutionen
Te
ch
nis
Hierbei handelt es sich um eine »Schraubenlinie« in z-Richtung, mit
dem Startpunkt ~r0 , und dem Radius
v⊥
v⊥ · m
=
Ω
q·B
für
R=
uh
l
Anschaulich bedeutet dies unter Anderem, dass der Radius
mit sinkendem B ansteigt.
hr
st
(v) Lorentzkraft auf Stromverteilung. Sei eine Stromverteilung ~j gegeben:
Le
~j =
c
n
b) m · v⊥ · Ω · sin (Ω(t − t0 )) = q · B · v⊥ · sin (Ω(t − t0 ))
Auch für die zweite Komponente in (I) erhält man in Übereinstimmung mit a) durch
Koeffizientenvergleich die gleiche Gyrationsfrequenz Ω.
K
X
qi · ni · ~vi
(K: Anzahl der verschiedenen Trägersorten (Spezies))
i=1
f~L =
K
X
~ · ni =
qi · (~vi × B)
i=1
K
X
!
qi · ni · ~vi
~ = ~j × B
~
×B
i=1
f~L ist die sog. Lorentzkraftdichte, und durch folgende Gleichung gegeben:
~
f~L = ~j × B
42
(3.5)
3 MAGNETOSTATIK
3.2 Kraft und Drehmoment auf stromführende Leiter
K h
X
i
~
~
~ + ~j × B
~
qi E + qi ~vi × B ni = ρE
ch
e
f~em =
n
Für die elektromagnetische Kraftdichte f~em gilt dann:
i=1
M
ün
3.2. Kraft und Drehmoment auf stromführende Leiter
-T
U
(i) Grundvorstellung:
Eine Kraft auf im Leiter bewegte Ladungen wird vollständig auf das Substratmaterial (»Wirtsgitter«) übertragen.
ˆ
~ r) d3 r
~
~j(~r) × B(~
FLeiter =
(3.6)
Leiter
ds
da
tro
Man betrachtet einen linienförmigen Leiter
mit der Querschnittsfläche A. Durch den
Leiter fließt ein Strom I. Dabei gilt:
ph
ys
ik
(ii) Linienförmige Leiter (»Drähte«):
~j(~r)d3 r = ~j(~r)(d~a · d~s) = ~t · |~j(~r)| · d~a ds
ek
dr
s = r ( s ); t =
; d s = t ds
ds
ch
e
El
mit der Ortskurve ~s = ~r(s) und dem
~
r(s)
dazugehörigen Tangentenvektor ~t = dd
s
Te
ch
nis
Für die Kraft auf den Leiter folgt dann
ˆ
ˆ ˆ
~ r)d3 r = −
~ r) × |~j(~r)|dad~s
F~Leiter = ~j(~r) × B(~
B(~
V
C A(~s)
für
~
(Vorzeichenwechsel durch Vertauschen von ~j und B)
ˆ
~
~ s) × Id~s
=⇒
FLeiter = − B(~
´
uh
l
mit I =
~
A(s)
(3.7)
C
|~j(~r)|da = const.
C
Le
hr
st
Die Kraft F~Leiter , die der Leiter erfährt, kann man auch in differentieller Schreibweise angeben:
ˆ
~
F~Leiter = d F~L , mit d F~L = I · d ~s × B
(3.8)
I
c
B
ds
I
43
3.2 Kraft und Drehmoment auf stromführende Leiter
3 MAGNETOSTATIK
n
(iii) Drehmoment auf Leiterschleife:
ün
~ = (~r − ~r0 ) × F~
M
ch
e
a) Drehmoment am Hebel:
Man kann das Drehmoment an einem Hebel mit
folgender Gleichung berechnen:
(3.9)
M
Drehachse
)
- T)
U
+
.
ph
ys
ik
+ )
)
Hierbei zeigt r~0 auf einen Punkt auf der Drehachse und ~r auf den Angriffspunkt der Kraft F~ .
~ ist parDie Richtung des Drehmomentes M
allel zur Drehachse. Durch Anwendung der
“Rechtsschrauben-” oder “Korkenzieherregel”
~ leicht
kann man von der Richtung des Vektors M
auf die Drehrichtung der Achse schließen.
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
tro
b) Leiterschleife:
Betrachtet wird eine rechteckige Leiterschleife der Länge b und der Breite 2R (siehe 19).
Durch die Leiterschleife fließt ein Strom I.
Strom I
Abb. 19: rechteckige Drahtschleife
i. Gesamtkraft:
ˆ
F~Leiter =
d F~ =
C
~ und dF~1 = −dF~2
Mit dF~i = I · d~si × B
44
5 ˆ
X
i=1
Ci
d Fi = 0
3 MAGNETOSTATIK
3.3 Permanentmagnet
ii. Gesamtdrehmoment:
ˆ
ˆ
~
~
~
M = R × dF =
ˆ
~ × d F~1 +
R
~3 +
dM
C3
|
~4 +
dM
C4
{z
C5
=0
~5
dM
}
ˆ
~ =2 ·
M
~ × d F~1 = 2R
~×
R
ˆ
~
~
d F1 = 2R × I ·
d ~s1 ×B
=
C1
C1
| {z }
-T
U
C1
M
ˆ
ch
e
ˆ
ˆ
ˆ
+
ün
C
(−R) × d F~2
C2
n
C1
=~b
ik
#
"
~ × [I~b × B]
~ = 2I ~b(R
~ · B)
~ − B(
~ R
~ · ~b)
= 2R
|{z}
ph
ys
=0
~ = IA
~×B
~
M
tro
~ = 2R
~ × ~b folgt:
Mit der vectoriellen Fläche A
(3.10)
El
ek
Dieser Ausdruck gilt auch für beliebig geformte
ebene Leiterschleifen C.
ch
e
Def. Magnetisches Moment:
~
m
~ = IA
Te
ch
nis
(3.11)
Damit:
~ =m
~
M
~ ×B
(3.12)
für
3.3. Permanentmagnet
hr
st
uh
l
S. 42_2
Ein Permanentmagnet besteht aus einem
Material, in dem viele
N
23
3
G
(∼ 10 cm ) atomare Ringströme, gleichorientierte magnetische
M
S
Momente m
~ 0 beitragen:
~ =n·m
Magnetisierung: M
~ 0 mit nRingströmen pro Volumen
N
c
Le
Drehmoment auf Dauermagnet:
~ = V (M
~ × B)
~ =m
~
M
~ ×B
V : Volumen
~
m
~ =V ·M
gesamtes magnetisches Moment
Dauermagnete und Ringströme (Spule) zeigen gleiches Verhalten.
45
M
S
3.4 Quellenfreiheit (Divergenzfreiheit) des B-Feldes
3 MAGNETOSTATIK
ch
e
(i) Experimentelle Erfahrung: Es gibt keine magnetischen Ladungen (keine magnetischen Monopole, nur magnetische Dipole).
ün
(ii) Divergenzsatz (integrale Form)
X
~ d ~a = Q(V ) =
D
-T
U
• Magnetostatik:
qα
~
rα ∈V
∂V
ˆ
S. 43_1
M
ˆ
• Elektrostatik:
~ · d ~a = 0
B
S. 43_3
ph
ys
S. 43_4
S. 43_2
tro
N
−
Dipolfeld (magn.)
Dipolfeld (elektr.)
El
ch
e
Magnetfeld
+
S
ek
+
(3.13)
ik
∂V
Monopolfeld
Te
ch
nis
Abb. 20: Feldliniendarstellung verschiedener elektrischer und magnetischer Felder
~
(i) Divergenzfreiheit des B-Feldes
(differenziell)
Gemäß Gleichung (A.30) gilt:
ˆ
ˆ
~
~ d3 r
0=
B d ~a =
div B
∂V
für jedes Kontrollvolumen V
V
~
Daraus folgt die Quellenfreiheit des B-Feldes:
~ =0
div B
uh
l
für
n
3.4. Quellenfreiheit (Divergenzfreiheit) des B-Feldes
c
Le
hr
st
~ =ρ)
vgl. Gleichung (1.23) ( Gaußsches Gesetz:div D
46
(3.14)
3 MAGNETOSTATIK
3.5 Erzeugung magnetostatischer Felder
n
3.5. Erzeugung magnetostatischer Felder
ün
(quasistationäre Form) Im Vakuum gilt:
ˆ
~ · d ~r = µ0 · I(A)
B
ch
e
3.5.1. Amperesches Durchflutungsgesetz
ik
∂A
-T
U
∂A
µ0 = 4π · 10−7 Ωms
Im magnetisierbaren Material gilt entsprechend:
ˆ
~ · d ~r = µ0 · µr · I(A)
B
(3.15)
M
∀ positiv orientierbaren Flächen A
tro
ph
ys
Hierbei ist der Zusammenhang zwischen der relativen Permeabilität und der absoluten Permeabilität folgendermaßen gegeben:
µ = µ0 · µ r
(3.16)
ch
e
I
El
ek
µ: Absolute Permeabilität
µr : Relative magnetische Permeabilität
Te
ch
nis
C = ∂A
A
für
3.5.2. Magnetische Feldstärke
~ = 1 ·B
~ bzw. B
~ =µ·H
~
H
µ
(3.17)
hr
st
uh
l
Damit gilt in magnetisierbaren Medien:
ˆ
~ d ~r = I(A)
H
(3.18)
∂A
c
Le
Ampersches Durchflutungsgesetz (quasi-stationär)
~ hängt von der erzeugenden Stromverteilung, nicht aber vom umgebenden Material ab.
Fazit: H
Allgemeine Form des Ampereschen Durchflutungsgesetzes:
ˆ
ˆ
~
H d ~r = ~j · d ~a
(3.19)
A
∂A
47
3.5 Erzeugung magnetostatischer Felder
3 MAGNETOSTATIK
)
elektrische Kraft ( ~ )
E
Probeladung
=⇒
~
B
Lorentzkraft
ch
e
Kraft auf
ruhende
bewegte
ün
materialabhängige Größen:
(
n
Analogie zwischen Elektrostatik und Magnetostatik
Wirkung von
Ladungsverteilung ρ
Stromverteilung ~j
)
Gauß ( ~ )
D
=⇒
~
H
Ampère
-T
U
(
Materialgesetze:
~ = E
~ ·
D
.
..
..
.
ik
.
.
..
~ = H
~ ·µ
B
µ = µ0 · µ r
tro
3.5.3. Permeabilität µ und magnetische Suszeptibilität χm
µ r = 1 + χm ⇔ χm = µ r − 1
(3.20)
ek
Damit ist:
El
~
~
µ0 · H
+
µ0 · χm · H
| {z }
| {z }
aus Stromverteilung ~j
induziertes Magnetfeld durch
gleichorientierte Ringströme
im Material
Te
ch
nis
ch
e
~ =µ·H
~ =
B
ph
ys
..
M
nur von der Quelle abhängig:
Atomistische Mechanismen, die Magnetismus verursachen (Klassifizierung magnetischer Materialien):
uh
l
für
• Diamagnetismus:
~ führt
Präzessionsbewegung gegenläufiger atomarer Ringströme unter dem Einfluss von H
~ H,
~ d.h.
zu kleinen, unkompensierten Nettoringströmen 6= 0. Nach Lenzscher Regel: M
~ = χm H,
~ χm < 0, |χm | 1, µr < 1
M
(z.B. Au, Ag, Cu, H2 O,...)
c
Le
hr
st
• Paramagnetismus:
~ Orientierungspolarisation bereits vorhandener permanenter magnetischer Dipolmomente: M
~
H;
χm > 0; |χm | 1; µr > 1
(z.B. Pt, Al,...)
• Ferromagnetismus:
Bei hinreichend kleiner Temperatur T < TC(urie) kommt es zu einer Domänenbildung mit
spontaner Vorzugsrichtung der permanenten magnetischen Dipole. (»Weißsche Bezirke«) Für
~ 6= 0 erfolgt eine Vergrößerung der Domänen mit M
~ H.
~ Daraus resultiert ein HystereseH
verhalten.
χm 1
(≈ 104 . . . 105 )
48
3 MAGNETOSTATIK
3.6 Berechnung magnetostatischer Felder und Kräfte
µ r = 1 + χm ≈ χm ;
~ ≈ µ0 · M
~
~ = µ0 · H
~ + µ0 χm H
B
| {z }
~
M
χ0
T − TC
ch
e
χm =
n
Für T > TC : Phasenübergang in paramagnetischen Zustand
für T > TC
ün
TC z.B.: Ni: 360◦ C ; Fe: 770◦ C ; Ni: 1075◦ C
S. 47b_2_(1)
G
M
M
G
B
-T
U
G
B
Sättigung
Remanenz
Br
Hc
Hm
ik
−Hc
χm 1
− Br
G
H
G
H
S. 47b_2
ph
ys
−Hm
G
H
tro
Abb. 21: Ferromagnetismus (links) ; magn. »weiche« (mitte) und magn. »harte« Werkstoffe
S. 47
ek
3.6. Berechnung magnetostatischer Felder und Kräfte
El
Berechnung mit Hilfe des Ampèreschen Gesetzes aus gegebener Stromverteilung:
˛
ˆ
~
H d ~r = ~j d ~a
A
hr
st
uh
l
für
Te
ch
nis
ch
e
∂A
Abb. 22: Stromfluss durch eine Fläche mit der Umrandung ∂A
Le
(i) Ein wichtiges Beispiel ist ein unendlich langer, gerader Draht. Aus der Symmetrie folgt:
ˆ
ˆ
~ d ~r = I =
H
∂K(r,z)
0
2π
Hϕ (r) ~eϕ · ~eϕ ·r d ϕ = Hϕ (r) · r · 2π = I
| {z }
c
=1
⇒
I
2πr
~ r) = I · ~eϕ (ϕ)
H(~
2πr
Hϕ (r) =
(3.21)
49
3.6 Berechnung magnetostatischer Felder und Kräfte
3 MAGNETOSTATIK
Kräfte zwischen zwei parallelen Leitern
Kraft auf Draht »2« (siehe (23)):
ch
e
n
~ 1 = µI2 ~ez × H
~ 1 ds
d F12 = I2 · d ~s × B
I1
· ~eϕ
2π · a
µI1 I2
d F~12 =
· ~ez × ~eϕ ds
2π · a | {z }
folgt:
ün
~ 1 (|~r| = a) =
mit H
(3.22)
ph
ys
ik
d F~12
µI1 I2
=−
· ~e12
ds
2πa
-T
U
Daraus resultiert:
M
=−~er =−~e12
Te
ch
nis
ch
e
El
ek
tro
Dabei zeigt ~e12 von Leiter »1« nach Leiter »2«. Parallel stromdurchflossene Leiter ziehen
sich an, antiparallel stromdurchflossene Leiter stoßen sich ab.
hr
st
uh
l
für
d F12
Le
“1”
“2”
c
Abb. 23: Magnetfeld eines undendlich langen geraden Drahtes ; Kräfte zwischen zwei parallelen
geraden Drähten
50
3 MAGNETOSTATIK
3.6 Berechnung magnetostatischer Felder und Kräfte
y
n
(ii) Fall einer allgemeinen zylindersymmetrischen Stromverteilung
Bei einer gegebenen Stromverteilung ~j(~r) = j(r)~ez
folgt aus der Symmetrie:
ˆ
~ d ~r =
H
~j d ~a
ˆr ˆ2π
M
A(r)
ˆr
j(r0 )r0 dϕdr0 = 2π
2πrHϕ (r) =
0
0
1
Hϕ (r) =
r
=⇒
ˆr
r
0
0
0
j(r )r dr
(3.23)
ik
0
j(r0 )r0 dr0
x
-T
U
∂A(r)
ün
˛
ch
e
~ r) = H(r)~eϕ
H(~
ch
e
El
ek
tro
ph
ys
0
Te
ch
nis
(iii) Gerader »unendlich« langer Draht mit Radius a
(
j(r) =
ˆr
S. 50
0
I
a2 π
für 0 ≤ r ≤ a
0
für r > a
(
0
0
j(r )r dr =
0
uh
l
für
(
=⇒
Hϕ(r) =
I 1
r
a2 π 2
I
2πr
c
für 0 ≤ r ≤ a
für r > a
für 0 ≤ r ≤ a
für r > a
Hϕ
I
2π a
Le
hr
st
I 1 2
r
a2 π 2
I
2π
r
a
~
Hϕ verhält sich also für den Fall r > a wie das H-Feld
eines idealen linienförmigen geraden
Leiters.
51
3.7 Vervollständigung des Ampèresches Gesetzes
3 MAGNETOSTATIK
3.7. Vervollständigung des Ampèresches Gesetzes
~ · d ~r
H
∂A
ün
A
ch
e
(i) Bisher war I(A) ein reiner Leitungsstrom:
ˆ
˛
~j d ~a =
I(A) =
n
3.7.1. Erweiterung des Ampèreschen Gesetzes (nach Maxwell)
(ii) Ladungsbilanz:
= −I(A1 ) = −
Q=
~
∂D
∂t
~ a
A1 j d ~
~ a=−
A1 ∪A2 D d ~
´
~ ~ a=−
A2 D · N d ~
´
~ d ~a
D
A2
ˆ
⇒
~j d ~a = − d Q =
dt
ˆ
~
∂D
· d ~a
∂t
A2
A1
heißt Verschiebungsstromdichte.
uh
l
Def.
´
´
für
dQ
dt
Te
ch
nis
ch
e
El
ek
tro
ph
ys
ik
-T
U
M
Frage: Was passiert im Falle I(A) = ddQt bei einem geschlossenem Stromkreis mit »Batterie«
(Kondensator)?
˛
I(A1 ) = I , wenn C = ∂A1
~ d ~r =
H
⇒ Widerspruch!
C
0 , wenn C = ∂A2
˛
~ d ~r =
H
C
Le
hr
st
Auflösung des Widerspruches:
´
~
A1 j d ~a
´
~
∂D
A2 ∂t
,wenn C = ∂A1
· d ~a , wenn C = ∂A2
c
Allgemein lautet die Maxwellsche Erweiterung des Durchflutungsgesetzes:
ˆ
ˆ
~ d ~r =
H
∂A
A
52
~
~j + ∂ D
∂t
!
· d ~a
(3.24)
3 MAGNETOSTATIK
3.7 Vervollständigung des Ampèresches Gesetzes
3.7.2. Ampère-Maxwellsches Gesetz in differentieller Form
ch
e
ün
A
A
∂A
n
Nach Gleichung (3.24) gilt für jede orientierbare Kontrollfläche A:
!
ˆ
ˆ
ˆ
~
∂
D
~ d ~a
~
~j +
d ~a = rot H
H d ~r =
∂t
-T
U
~
∂D
∂t
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
tro
ph
ys
ik
~ = ~j +
rot H
M
Daraus folgt das allgemeine Durchflutungsgesetz in differentieller Form:
53
(3.25)
4 INDUZIERTE ELEKTRISCHE FELDER
4. Induzierte Elektrische Felder
n
4.1. Bewegungsinduktion
ch
e
4.1.1. Elektromotorische Kraft in bewegten leitfähigen Medien
ün
~ bewegt.
Ein elektrisch leitfähiges Medium werde mit der Geschwindigkeit ~v durch ein Magnetfeld B
~
~
Dadurch erfährt eine im Medium ruhende Probeladung q die Lorentzkraft FL = q(~v × B).
S. 56
M
Interpretation: »Durch Bewegung induzierte elektrische Feldstärke«:
-T
U
~ ind = ~v × B
~
E
4.1.2. Induzierte Spannung in bewegter Leiterschleife
ik
(i) Modellversuch
~
E
ind d ~r =
1
tro
1
dA
dΦ(A)
dx
·h·B =B
=−
dt
dt
dt
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
Uind =
ˆ2 ~ d ~r = v · B · h
~v × B
ph
ys
ˆ2
Uind =
(4.1)
Abb. 24: Bewegte Leiterschleife
Mit dem magnetischer Fluss:
ˆ
(4.2)
A
Le
c
~ d ~a
B
Φ(A) =
hier: Φ(A) = −B · A
Die induzierte Spannung errechnet sich dann mit
d
Uind = − Φ(A)
dt
54
(4.3)
4 INDUZIERTE ELEKTRISCHE FELDER
4.1 Bewegungsinduktion
ün
ch
e
n
(ii) Allgemein gültige Darstellung der Bewegungsinduktion für zeitlich veränderliche Leiterschlei~ r):
fen ∂A(t) im zeitlich konstanten Magnetfeld B(~
"ˆ
#
ˆ
d
~ (~r, t) × B(~
~ r) · d ~r = −
~ r) d ~a
Uind =
V
B(~
(4.4)
d t A(t)
∂A(t)
M
4.1.3. Unipolar-Maschinen
-T
U
Beispiel: Barlowsches Rad
ph
ys
ik
z
1
y
tro
2
El
)
ch
e
x
ek
)
Te
ch
nis
a
Abb. 25: Barlowsches Rad
ˆ2 ~ d ~r
Uind =
~v × B
1
für
Induzierte Spannung:
c
Le
hr
st
uh
l
~ = B · ~ez , ~v = Ω · r · ~eϕ ⇒ ~v × B
~ = ΩBr~er
Mit B
Der Weg von 1 nach 2: ~r = r~er ; 0 ≤ r ≤ a; d~r = ~er · dr
So folgt für die induzierte Spannung:
ˆa
Uind =
1
ΩBrdr = ΩBa2
2
(4.5)
0
NB: Die induzierte Spannung läßt sich nicht schreiben als
d
Uind = − Φ(A)
dt
~ = konstant und der Integrationsweg zwischen den Spannungsabnehmern konstant
weil B
bleibt, also A = konstant.
55
4.2 Ruheinduktion
4 INDUZIERTE ELEKTRISCHE FELDER
4.2. Ruheinduktion
ün
ch
e
n
4.2.1. Induzierte Spannung in ruhender Leiterschleife
Magnetischer Fluss:
ˆ
A
El
ek
Für eine (fast) geschlossene Leiterschleife C = ∂A gilt:
tro
~ r, t) d ~a
B(~
Φ(A) =
ph
ys
ik
-T
U
M
Zusätzliche Induktion eines elektrischen Feldes (induzierte Spannung) durch explizite
~ r, t).
zeitliche Änderung des Magnetfeldes B(~
d
Φ(A)
dt
(4.6)
ch
e
Uind = −
Konkrete Berechnung:
Te
ch
nis
ˆ
ˆ
d Φ(A)
1 ~
~ r, t)d~a =
= lim
B(~r, t + ∆t)d~a − B(~
∆t→0 ∆t
dt
A
A
ˆ
1 ~
~ r, t) d~a =
B(~r, t + ∆t) − B(~
=
lim
∆t→0 ∆t
A
ˆ
für
=
~
∂B
(~r, t) · d ~a
∂t
A
uh
l
Daraus folgt für die Ruheinduktion in einer zeitlich unveränderten Leiterschleife:
ˆ
hr
st
Uind = −
A
~
∂B
· d ~a
∂t
(4.7)
Le
Interpretation als »induziertes« elektrisches Feld:
c
~ ind (~r, t), die
Uind. wird erzeugt von einer räumlich verteilten induzierten elektrischer Feldstärke E
längs ∂A die induzierte Spannung Uind ergibt, gemäß:
ˆ
ˆ
~ ind · d ~r = −
E
Uind =
∂A
A
56
~
∂B
· d ~a
∂t
(4.8)
4 INDUZIERTE ELEKTRISCHE FELDER
4.2 Ruheinduktion
4.2.2. Maxwellsche Verallgemeinerung: Differentielle Form des Induktionsgesetzes
~
∂B
∂t
~
~ ind .
erzeugt ein induziertes elektrisches E-Feld
E
M
•
ün
ch
e
n
• Gleichung (4.7) gilt auch dann, wenn keine materielle Schleife längs C = ∂A vorhanden ist
(d.h. im leeren Raum)
´
~ r = 0 auf
• Gleichung (4.7) ist die Erweiterung des Grundgesetzes der Elektrotatik ∂A Ed~
zeitveränderliche Vorgänge.
Die Raumladung ρ erzeugt das Feld
~ pot = −∇Φ,
E
-T
U
mit div(∇Φ) = −ρ.
~
Totales E-Feld:
~ ind
+
E
−∇Φ
| {z }
|{z}
wirbelfrei,
Wirbelfeld,
quellenbehaftet
quellenfrei
(4.9)
ph
ys
ik
~ =E
~ pot + E
~ ind =
E
NB:
tro
~ = − rot ∇Φ + rot E
~ ind.
rot E
| {z }
=0
ek
Induktionsgesetz in differentieller Form für eine beliebige Kontrollfäche A:
El
=⇒
A
=⇒
A
∂A
~ =−
rot E
c
Le
hr
st
uh
l
für
Te
ch
nis
A
ch
e
Satz von
Stokes ˆ
ˆ
ˆ
ˆ ~
(4.8)
z}|{
z}|{
~ d ~a = rot E
~ ind · d ~a
~ ind · d ~r = − ∂ B · d ~a
rot E
=
E
∂t
57
~
∂B
∂t
(4.10)
4.3 Allgemeine Induktion
4 INDUZIERTE ELEKTRISCHE FELDER
4.3. Allgemeine integrale Form des Induktionsgesetzes
ˆ
=⇒
~
∂B
(~r, t)d~a +
∂t
Uind = −
A(t)
ch
e
A(t)
ün
(4.11)
tro
~ r, t)d~a = − d Φ(A(t))
B(~
dt
ek
ˆ
~ r, t)d~r
~v (~r, t) × B(~
El
d
Uind = −
dt
ˆ
∂A(t)
Man kann zeigen, dass gilt:
-T
U
∂A(t)
ik
Uind =
elektromagnetische Kraft
}|
{
~ r, t)
~
d~r
+
~v (~r, t) × B(~
E
(~r, t)
ind
|
{z
}
| {z }
Anteil zur
Anteil zur
Bewegungsinduktion
Ruheinduktion
ph
ys
ˆ
z
M
ch
e
n
~ r, t) zeitlich veränderlich:
Leiterschleife ∂A(t) zeitlich veränderlich und Magnetfeld B(~
c
Le
hr
st
uh
l
für
Te
ch
nis
D.h. die Ruhe- und Bewegungsinduktion ist in einer Größe, − ddt Φ(A(t)), enthalten.
58
(4.12)
4 INDUZIERTE ELEKTRISCHE FELDER
4.4 Maxwellsche Gleichungen
4.4. Maxwellsche Gleichungen
vgl. (1.23)
~
~ = − ∂B
rot E
∂t
vgl. (4.10)
~ =0
div B
vgl. (3.14)
~
~ = ~j + ∂ D
rot H
∂t
vlg. (3.25)
(4.13)
ch
e
-T
U
M
~ =ρ
div D
ün
$
'
n
Die Grundgleichungen des Elektromagnetismus lassen sich wie folgt zusammenfassen:
(4.14)
ph
ys
ik
(4.15)
%
tro
&
(4.16)
El
ek
Dabei handelt es sich um Naturgesetze.
Hinzu kommen die drei phänomenologischen Materialgleichungen:
$
~ = µH
~
B
(4.17)
~ = E
~
D
(4.18)
~j =
~
σE
|{z}
+ weitere
treibende
Kräfte
&
(4.19)
%
hr
st
uh
l
für
Te
ch
nis
ch
e
'
c
Le
Das System (4.13) - (4.19) ist auf einem Gebiet Ω ⊂ E3 zu lösen. Nach Vorgabe von Randwerten
auf ∂Ω und Anfangswerten für t = t0 sind hierdurch alle klassichen elektromagnetischen Vorgänge
vollständig bestimmt.
59
c
uh
l
hr
st
Le
für
ch
e
Te
ch
nis
ph
ys
tro
ek
El
ik
-T
U
M
ün
ch
e
n
A MATHEMATISCHE GRUNDLAGEN
A. Mathematische Grundlagen
n
A.1. Euklidischer, affiner Raum E3
ch
e
A.1.1. Struktur
M
ün
In der analytischen Geometrie wird der dreidimensionale, kontinuierliche Ortsraum als reeller,
affiner Raum E3 aufgefasst, der aus der Menge aller Positionen (Orte, Punkte) besteht:
Ortspunkt P ∈ E3 ,
E3 = Modell des flachen, dreidimensionalen Kosmos
-T
U
E3 hat folgende Struktur:
A1:
tro
ph
ys
ik
(i) Zu E3 gibt es einen reellen, 3-dimensionalen Vektorraum, dessen Elemente “gerichtete Strecken” zwischen je zwei Punkten aus E3 sind.
−−→
Präziser: Jedem Paar (P, Q) mit P, Q ∈ E3 ist eindeutig ein mit P Q bezeichneter Vektor so
zugeordnet, dass folgende Axiome erfüllt sind:
+
∃1
P ∈E3
~ ∈V3
V
Q∈E3
El
∀
ek
−→
~ =−
V
PQ
∀
ch
e
∀
+
~ )
(Schreibweise: Q = P + V
A2:
−−→ −→ −→
P Q+QS=P S
Te
ch
nis
+
(ii) Daraus folgt:
∀
−−→ ~
P P =0
;
−−→
−−→
QP =−P Q
P,Q∈E3
hr
st
uh
l
P ∈E3
∀
c
Le
(iii) Der Vektorraum V3 ist “euklidisch”, d.h. er hat ein Skalarprodukt
h.|.i : V3 × V3 → R (=positiv-definite symmetrische Bilinearform),
und damit eine Norm
k.k =
p
h.|.i,
mit deren Hilfe man Längen und Winkel in E3 messen kann.
61
+
P,Q,S∈E3
für
+
A.1 Euklidischer, affiner Raum E3
A MATHEMATISCHE GRUNDLAGEN
ün
M
+
ik
~ |W
~ i =: V
~ ·W
~
Übliche Schreibweise für Skalarprodukte: hV
+
−−→ −→
−−→ −→
hP Q|P Ri
cos(α) = cos(]P Q, P R) = −−→
−→
kP Qk · kP Rk
+
-T
U
−−→
−→
• Winkel = Winkel zwischen P Q und P R gemäß ebener
Trigonometrie:
ch
e
n
• Abstand = Länge zwischen zwei Punkten:
q
−−→ −−→
−−→
−−→
|P Q| := hP Q|P Qi = kP Qk
| {z }
Norm
ph
ys
~,V
~ ,W
~ ) = sgn(det(U
~,V
~ ,W
~ )) kann man jedem 3-Bein
(iv) V3 ist »orientiert«, d.h. über or(U
~
~
~
(U , V , W ) einen Schraubsinn zuordnen:
tro
d.h. man berechnet:
ek
~ ×V
~)·W
~ ) = sgn((U
~ ×V
~)·W
~ ), mit (U
~ ×V
~)·W
~ = det(U
~,V
~ ,W
~ ),
or((U
und entscheidet gemäß:
El
~ ×V
~)·W
~ > 0 ⇒ rechts - orientiert
• wenn (U
ch
e
~ ×V
~)·W
~ < 0 ⇒ links - orientiert
• wenn (U
Te
ch
nis
A.1.2. Ursprung
In E3 kann man einen Punkt O ∈ E3 fest als »Koordinaten-Ursprung« wählen. Jedem Punkt
P ∈ E3 wird dann »eineindeutig« (=bijektiv) ein Ortsvektor
−→
~r(P ) := OP
+
für
O+
mit der entsprechenden Umkehrabbildung
uh
l
~r(P ) 7→ P = O + ~r(P )
hr
st
zugeordnet.
A.1.3. Basis
c
Le
Wählt man in V3 eine Basis b~1 , b~2 , b~3 , so lässt sich jeder Punkt P ∈ E3 durch seine »Koordinaten«
(x1 , x2 , x3 )T ∈ R3 eineindeutig darstellen, gemäß
~r(P ) = x1 b~1 + x2 b~2 + x3 b~3 ,
bzw.
P = O + x1 b~1 + x2 b~2 + x3 b~3 .
62
A.1 Euklidischer, affiner Raum E3
A MATHEMATISCHE GRUNDLAGEN
Dabei heißt (O, b~1 , b~2 , b~3 ) »Koordinatensystem«.
1 für i = j
,
0 für i 6= j
ün
b~i · b~j = δij =
ch
e
(
n
Ist (b~1 , b~2 , b~3 ) eine Orthonormalbasis, d.h.
Schreibweise:
-T
U
(O, e~1 , e~2 , e~3 ), bzw. (O, e~x , e~y , e~z ), oder (O,~i, ~j, ~k)
M
so heißt es »kartesisches Koordinatensystem«.
Ein Ortsvektor ist dann zum Beispiel:
tro
ph
ys
ik
~r(P ) = xe~x + y e~y + z e~z , bzw. ~r(P ) = x1 e~1 + x2 e~2 + x3 e~3
A.1.4. Skalarfeld
El
ek
Ein Skalarfeld auf E3 ist eine Abbildung Φ : E3 → R ; P 7→ Φ(P ). Dieser Abbildung kann bei fest
gewähltem Koordinaten-System (O, b~1 , b~2 , b~3 ) die »Koordinatendarstellung«
ch
e
Φ̃(x1 , x2 , x3 ) := Φ(O + x1 b~1 + x2 b~2 + x3 b~3 )
Te
ch
nis
bijektiv zugeordnet werden. Meist wird schlampigerweise Φ und Φ̃ nicht unterschieden!
A.1.5. Vektorfeld
für
Ein Vektorfeld auf E3 ist eine vektorwertige Abbildung
~ : E3 → V3 ; P 7→ V
~ (P )
V
Le
hr
st
uh
l
~ (P ) nach
Bei fest gewähltem Koordinatensystem (O, b~1 , b~2 , b~3 ) kann man den Ort ~r(P ), wie auch V
der Basis (b~1 , b~2 , b~3 ) entwickeln.
~ (P ) = V
~ (O + ~b1 x1 + ~b2 x2 + ~b3 x3 ) =: V
~˜ (x1 , x2 , x3 )
V
~˜ (x1 , x2 , x3 ) = V1 (x1 , x2 , x3 ) · ~b1 + V2 (x1 , x2 , x3 ) · ~b2 + V3 (x1 , x2 , x3 ) · ~b3
V
c
Die Zuordnung
~ (P ) V (x), mit V : R3 → R3 (“V in b-Koordinaten”)
V
(x1 , x2 , x3 )T = x 7→ (V1 (x), V2 (x), V3 (x))T = V (x) ∈ R3
~ (P ), V
~˜ (x) und V (x)
ist eindeutig. Leider wird auch hier oft schlampigerweise nicht zwischen V
unterschieden.
63
A.1 Euklidischer, affiner Raum E3
A MATHEMATISCHE GRUNDLAGEN
Ortsvektor in Zylinderkoordinaten:
ph
ys
ik
z
ey
y
Te
ch
nis
ch
e
El
ek
tro
P
ex
x
für
Abb. 26: Zylinderkoordinaten
~r(P ) = r · cos(ϕ) · ~ex + r · sin(ϕ) · ~ey + z · ~ez = r · ~er (ϕ) + z · ~ez
hr
st
uh
l
Skalarfeld in Zylinderkoordinaten:
Φ̃(r, ϕ, z) = Φ(O + r · ~er (ϕ) + z · ~ez )
c
Le
Vektorfeld in Zylinderkoordinaten:
~˜ (r, ϕ, z) = Vr (r, ϕ, z)~er (ϕ) + Vϕ (r, ϕ, z)~eϕ (ϕ) + Vz (r, ϕ, z)~ez ,
V
sowie
T
V (r, ϕ, z) =
M
-T
U
~er (r, ϕ, z) = cos(ϕ) · ~ex + sin(ϕ) · ~ey
→ ONB, rechtsorientiert
~eϕ (r, ϕ, z) = − sin(ϕ) · ~ex + cos(ϕ) · ~ey
~ez (r, ϕ, z) = ~ez
ün
• Beispiel »Zylinderkoordinaten«:
Vr (. . .), Vϕ (. . .), Vz (. . .)
64
ch
e
Oft führt man auch ortsabhängige Basisvektoren von V3 ein (»begleitendes Dreibein«), d.h.
~ (P ) an jedem Punkt P nach dem
(~b1 (P ), ~b2 (P ), ~b3 (P )) und entwickelt ~r(P ) und V
Koordinatensystem (O, ~b1 (P ), ~b2 (P ), ~b3 (P )). ( »krummlinige Koordinaten« vgl. Abschn. A.4)
n
A.1.6. Ortsabhängige Basisvektoren
A.1 Euklidischer, affiner Raum E3
A MATHEMATISCHE GRUNDLAGEN
A.1.7. Konvergenz, Stetigkeit, Differenzierbarkeit
q
~ |V
~i
hV
n
~k=
kV
ch
e
Über die Norm in V3
lässt sich der Abstand zweier Vektoren mit
ün
~ −V
~k
kU
-T
U
M
definieren. Damit lassen sich die Konzepte der Differentialrechnung einführen. (Konvergenz, Stetigkeit, Differenzierbarkeit)
Beispiel:
~ (t) = V
~0 :⇔ lim kV
~ (t) − V
~0 k = 0
lim V
t→t0
t→t0
ph
ys
ik
~r(t + ∆t) − ~r(t)
d
~
r
1
~ (t) =
~ (t) = 0
V
~r(t + ∆t) − ~r(t) :⇔ lim (t) = lim
−V
∆t→0
∆t→0 ∆t
dt
∆t
!
P(t) = O + r (t)
tro
P1
+
6 I
r(
t)
()
El
(
V (t)
!
r t + !t
)
+P
2
ch
e
+
O
ek
!
r t
Te
ch
nis
Abb. 27: Punkt P wandert entlang einer Kurve
Interpretation:
Kurve ~r(t), O + ~r(t1 ) = P1 , O + ~r(t2 ) = P2
für
[t1 , t2 ] 3 t 7→ O + ~r(t) ∈ C(P1 , P2 )
uh
l
~ (t) = d ~r = Geschwindigkeit zur Zeit t = Tangentenvektor an C(P1 , P2 ) am Punkt P (t)
V
dt
c
Le
hr
st
Allgemein kann der Weg C(P1 , P2 ) ∈ E3 in Parameterdarstellung mit λ geschrieben werden:
[λ1 , λ2 ] 3 λ 7→ ~r(λ) ∈ V3
P (λ) = O + ~r(λ) ∈ E3
P1 = O + ~r(λ1 ); P2 = O + ~r(λ2 );
Der Tangentenvektor am Punkt P (λ) = O + ~r(λ) ist gegeben durch
d ~r
1
(λ) = lim
~r(λ + ∆λ) − ~r(λ) .
∆λ→0 ∆λ
dλ
65
A.1 Euklidischer, affiner Raum E3
A MATHEMATISCHE GRUNDLAGEN
In Koordinaten:
~r(λ) =
3
X
xi (λ)~bi
ch
e
X
3 3 xi (λ + ∆λ) − xi (λ) ~
1 X
d ~r
~
lim
= lim
·
xi (λ + ∆λ) − xi (λ) · bi =
· bi
∆λ→0
d λ ∆λ→0 ∆λ
∆λ
3
X
d xi
(λ)~bi
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
tro
ph
ys
ik
-T
U
i=1
dλ
M
=
ün
i=1
i=1
66
n
i=1
A.2 Wegintegrale im En bzw. Rn
A MATHEMATISCHE GRUNDLAGEN
A.2. Wegintegrale im En bzw. Rn
ch
e
n
A.2.1. Allgemein
Gegeben ist ein Weg C(P1 , P2 ) mit beliebiger (»glatter«) Parameterdarstellung
M
ün
R ⊃ (λ0 , λ1 ) 3 λ 7→ ~r(λ) ∈ Vn
T
x1 (λ), . . . , xn (λ)
∈ Rn
und ein Vektorfeld F~ (~r):
Dann berechnet man:
ˆ
ˆ
F~ (~r) · d ~r =
λ0
C(P1 ,P2 )
λ0
d xn
d x1
+ . . . + Fn (x1 (λ), . . . , xn (λ)) ·
dλ
F1 (x1 (λ), . . . , xn (λ)) ·
dλ
dλ
ek
λ1
d ~r
F~ (~r(λ)) ·
dλ
dλ
tro
bzw. im kartesischen Koordinatensystem:
ˆ
λ1
ph
ys
Vn 3 ~r 7→ F~ (~r) ∈ Vn
ik
-T
U
bzw. im kartesischen Koordinatensystem
ch
e
El
Man kann zeigen, dass der Wert dieses Integrals unabhängig von der Wahl der Parameterdarstellung ist, solange die Orientierung P1 → P2 beibehalten wird.
Te
ch
nis
Bemerkung:
Im Allgemeinen hängt ein Wegintegral von P1 nach P2 von der Wahl des Weges C(P1 , P2 ) ab!
A.2.2. Konservative Kraftfelder
uh
l
für
Ein Kraftfeld F~ (~r) heißt konservativ, wenn das Wegintegral
ˆ
F~ d ~r
C(P1 ,P2 )
c
Le
hr
st
nur von P1 und P2 , aber nicht von der Wahl des verbindenden Weges C(P1 , P2 ) abhängt. In diesem
Fall kann man das Wegintegral so schreiben:
ˆ
ˆ
F~ d ~r =
C(P1 ,P2 )
P2
F~ d ~r
P1
Man zeigt in der Mathematik für einfach zusammenhängende Gebiete (in kartesischen Koordinaten):
∂Fj
∂Fi
F~ (~r) konservativ ⇔
=
∀i, j mit i 6= j
∂xi
∂xj
67
A.2 Wegintegrale im En bzw. Rn
A MATHEMATISCHE
GRUNDLAGEN
S. 9
• Beispiel 1:
#
n
= F (x, y)
S. 43_1
∂Fy
∂Fx
= 1;
= −1
∂x
∂y
ün
⇒
−y
x
ch
e
"
e
F~ (x, y) = −y~ex + x~ey =
⇒ nicht konservativ!
e
F~ (x, y) = x~ex + y~ey =
⇒
x
y
#
= F (x, y)
-T
U
"
M
• Beispiel 2:
∂Fy
∂Fx
=0=
∂x
∂y
ph
ys
ik
⇒ konservativ!
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
tro
Monopolfeld
68
A MATHEMATISCHE GRUNDLAGEN
A.3 Totale Ableitung und Gradient
A.3. Totale Ableitung und Gradient von Skalarfeldern
ch
e
(i) Eine Linearform auf dem euklidischen Vektorraum Vn ist eine lineare Abbildung l.
n
A.3.1. Linearformen und dualer Raum
ün
l : Vn → R, ~u 7→ l(~u)
und der skalaren Multiplikation
(αl)(~u) := α · l(~u),
ik
mit ~u ∈ Vn , und α ∈ R. Vn∗ heißt auch »dualer Raum zu Vn «.
-T
U
M
Die Linearformen auf Vn bilden einen n-dimensionalen reellen Vektorraum Vn∗ , mit der Addition
(l1 + l2 )(~u) := l1 (~u) + l2 (~u),
tro
ph
ys
(ii) Über das Skalarprodukt h.|.i auf Vn gibt es einen kanonischen Isomorphismus zwischen Vn
und Vn∗ , d.h. eine bijektive strukturerhaltende Abbildung zwischen Vektoren und Linearformen:
Vn 3 ~u l ∈ Vn∗
Dabei wird jedem ~u ∈ Vn eine Linearform
El
ek
lu := h~u|.i ∈ Vn∗
zugeordnet, d.h.
lu (~v ) := h~u|~v i.
ch
e
∀~v ∈ Vn :
Te
ch
nis
Umgekehrt gibt es zu jeder Linearform l ∈ Vn∗ genau einen Vektor ~ul mit
∀~v ∈ Vn :
l(~v ) = h~ul |~v i
(A.1)
Explizite Berechnung von ~ul :
Sei (~e1 , ~e2 , . . . ~en ) eine Orthonormalbasis in Vn , d.h. h~ei |~ej i = δij .
uh
l
für
Berechne lj = l(~ej ), für j = 1, . . . n, und für l ∈ Vn∗ und bilde:
~l∗ =
n
X
l(~ej )~ej
(A.2)
j=1
Beweis:
P
~v = nj=1 vj ~ej mit vj = h~v |~ej i = h~ej |~v i
P
P
P
P
n
n
∀~v ∈ Vn : l(~v ) = l
v
~
e
ej ) = nj=1 lj h~ej |~v i = h nj=1 lj ~ej |~v i = h~l∗ |~v i q.e.d.
j=1 j j =
j=1 vj l(~
c
Le
hr
st
wobei ~l∗ = ~ul .
Das Ergebnis ist unabhängig von der Wahl der Orthonormalbasis! D.h.
∗ : Vn∗ 3 l 7→ ~l∗ ∈ Vn
69
A.3 Totale Ableitung und Gradient
A MATHEMATISCHE GRUNDLAGEN
ist die Umkehrabbildung zu
n
∗ : Vn 3 ~u 7→ lu = h~u|.i ∈ Vn∗ .
ch
e
Dann gilt:
M
ün
∗∗ = id (Identität)
-T
U
(iii) Erweiterung:
Ist (~b1 , . . . , ~bn ) eine schiefwinkelige Basis von Vn (kontravariante Basis), so kann man hierzu
die “duale” oder “kovariante” Basis (~b1 , ~b2 , . . . ~bn ) berechnen, die durch die Forderung
ph
ys
definiert ist. Oft wird diese auch als “reziproke” Basis notiert:
ik
h~bi |~bj i = δij
(~b1 , ~b2 , . . . ~bn ) = (~b∗1 , ~b∗2 , . . . ~b∗n )
~v =
n
X
tro
Dann kann man jedes ~v ∈ Vn als
i~
v bi oder ~v =
i=1
vi~bi
(A.3)
ek
i=1
El
schreiben.
)
(v 1 , v 2 , . . . v n ) heißen kontravariante (v1 , v2 , . . . vn ) heißen kovariante -
Komponenten von ~v .
ch
e
Te
ch
nis
Es gilt (1):
n
X
* n
+
n
X
X j
i
hb |~v i = ~b v ~bj =
v j h~bi |~bj i = v i
| {z }
~i
j=1
für
Es gilt (2):
j=1
δij
* n
+
n
X
X j
h~bi |~v i = ~bi vj~b =
vj h~bi |~bj i = vi
| {z }
j=1
j=1
δij
hr
st
uh
l
Aus (1), und (2) folgt:
~v =
n
X
h~v |~bj i~bj =
j=1
n
X
h~v |~bj i~bj
(A.4)
j=1
c
Le
bzw. in kompakter Form:
)
P
id = nj=1 ~bj h~bj |.i
P
→ “Vollständigkeitsrelation”
id = nj=1 ~bj h~bj |.i
(A.5)
Ist l ∈ Vn∗ eine Linearform, so lässt sich ~l∗ ∈ Vn ausrechnen als
~l∗ =
n
X
l(~bj )~bj =
j=1
n
X
j=1
70
l(~bj )~bj
(A.6)
A MATHEMATISCHE GRUNDLAGEN
A.3 Totale Ableitung und Gradient
(iv) Basiswechsel kovariant kontravariant
g ij = h~bi |~bj i
j=1
~bj =
n
X
ch
e
n
X
gij~bj
ün
h~bj |~bi i · ~bj =
j=1
h~bj |~bi i · ~bi =
j=1
n
X
M
n
X
→ “Metrischer Tensor”
g ij~bi
j=1
Dabei ist g ij die inverse Matrix von gij :
k=1
also ergibt sich die Einheitsmatrix In durch
h~bi |~bk i h~bk |~bj i
| {z } | {z }
ik
n
X
(A.8)
gkj
g ik
ph
ys
δij = h~bi |~bj i =
(A.7)
-T
U
~bi =
n
gij = h~bi |~bj i = ~bi · ~bj = |bi | · |bj | · cos ](~bi , ~bj )
tro
In = (g ik )(gkj ) für i, j = 1, 2, ..., n
n
X
g ij vj
bzw. vi =
El
vi =
ek
betimmen: und somit lassen sich die kontra- und kovarianten Komponenten transformieren:
j=1
gij v j
(A.9)
j=1
ch
e
12d
n
X
c
Le
hr
st
uh
l
für
Te
ch
nis
A.3.2. Totales Differential und Gradient als duale Größen
Abb. 28: Frechet-Ableitung
(i) Ein skalares Feld Φ : E3 → R ist (total) differenzierbar am Punkt P ∈ E3 , wenn es linear
approximierbar ist, d.h. es gibt eine Linearform lP : V3 → R, sodass der folgende Limes
71
A.3 Totale Ableitung und Gradient
A MATHEMATISCHE GRUNDLAGEN
existiert und verschwindet:
lim
=0
(A.10)
ch
e
|∆~r|
∆~
r→0
ün
Diese Linearform lP ist dann eindeutig bestimmt, und wird mit DΦ, oder d Φ bezeichnet und
ist die 1. Ableitung von Φ oder das totale Differential von Φ (“Frechet-Ableitung”).
-T
U
M
−−→
(ii) Der zu der Linearform d Φ kanonisch zugeordnete Vektor d Φ∗ aus V3 heißt »Gradient von
Φ bei P «
−−→∗
→
−
∂Φ
d Φ = grad Φ = ∇Φ =
(A.11)
∂~r
Es gilt also:
ik
~
n∈V3
→
−
∂Φ
(P )|~ni
d ΦP (~n) = hgrad Φ(P )|~ni = h ∇Φ(P )|~ni = h
|
{z
}
|
{z
}
| ∂~r {z }
ph
ys
∀
→
−
∇Φ(P ) · ~n
∂Φ
∂~
r (P )
· ~n
tro
grad Φ(P ) · ~n
ch
e
El
ek
Die Abbildung E3 ∈ P 7→ grad Φ(P ) ∈ V3 ist also ein Vektorfeld auf E3 ; es weist
stets in die Richtung des steilsten Anstiegs von Φ (vgl. A.3.3)
S. 12e
A.3.3. Richtungsableitung und partielle Ableitung
Te
ch
nis
(i) Sei P ∈ E3 und ~n ∈ V3 eine Richtung, die eine Gerade
durch P in Richtung von ~n festlegt. Parameterdarstellung:
G
n
G
P(α ) = P + α n
+
R 3 α 7→ ~r(α) = ~r(P ) + α · ~n ∈ V3
P
für
P (α) = P + α · ~n ∈ E3
hr
st
uh
l
Sei Φ(P ) ein differenzierbares Skalarfeld, dessen Definitionsbereich ein Stück der Gerade um
P enthält. Dann ist Φ entlang der Geraden bei P als eindimensionale Funktion
(−, ) 3 α → Φ(P + α~n)
c
Le
bei α = 0 differenzierbar. Die gewöhnliche Ableitung
d
Φ(P + α~n)
dα
α=0
heißt “Richtungsableitung von Φ nach ~n ”, “Erste Variation”, oder “Gateaux-Ableitung”.
∂Φ = hgrad ΦP |~ni = grad ΦP · ~n
(A.12)
∂n P
72
n
Φ(P + ∆~r) − Φ(P ) − lP (∆~r)
A MATHEMATISCHE GRUNDLAGEN
A.3 Totale Ableitung und Gradient
Beweis:
Φ(P + α~n) − Φ(P ) − (grad Φ · α~n)
=
α|~n|
1
Φ(P + α~n) − Φ(P )
=
lim
− grad Φ · ~n
|~n| α→0
α
|
{z
}
∂Φ ∂n P
0 = lim
M
ün
ch
e
n
α→0
ik
-T
U
(ii) grad ΦP zeigt in Richtung des steilsten Anstieges von Φ. Mit ϕ = ](grad ΦP , ~n) gilt für
den steilsten Anstieg:
∂Φ ; ~n ∈ V3 , |~n| = 1 = max | grad ΦP | · |~n| · cos ϕ = | grad Φ|
max
0≤ϕ≤2π
∂n P
ph
ys
Da ϕ = 0 gilt also ~n grad ΦP .
ch
e
El
ek
tro
(iii) grad ΦP steht senkrecht auf der Tangentialebene an der Fläche
0
P ∈ E3 ΦP 0 = const.
am Punkt P
Te
ch
nis
(iv) Partielle Ableitungen (räumlich unveränderliches Koordinatensystem):
Wählt man ein kartesisches Koordinatensystem
(O, ~e1 , ~e2 , ~e3 ), und Ortsvektor ~r(P ) = x1~e1 + x2~e2 + x3~e3 ,
uh
l
für
so heißen die Richtungsableitungen entlang der Koordinatenlinien durch einen Punkt P ,
α 7→ ~r(P ) + α~ej (oder schlampig: xj 7→ x1~e1 + . . . + xj ~ej + . . . + xn~en ) die »partiellen
Ableitungen von Φ nach xj «
Kurzscheibweise:
∂Φ , oder ∂j Φ
∂xj P
P
c
Le
hr
st
zu berechnen als:
Φ̃(x1 , x2 , x3 , . . . xj + ∆xj . . . , xn ) − Φ̃(x1 , . . . , xn )
∂Φ
=
∆xj →0
∆xj
∂xj
lim
(A.13)
∂Φ
Die Notation ∂x
ist eigentlich ungenau, weil sie nichts darüber aussagt, was beim Ableiten
j
konstant bleibt. Wenn die Richtungsableitungen existieren, und die Funktion stetig ist, so
existiert auch ein Gradient, wobei Φ̃(x1 , . . . xn ) = Φ(O + x1~e1 + . . . + xn~en ), da wegen
(~e1 , . . . , ~en ) ONB gilt xj = xj .
Offensichtlich ist
∂Φ
∂ Φ̃
=
= grad Φ · ~ej
(A.14)
∂xj
∂xj
73
A.3 Totale Ableitung und Gradient
A MATHEMATISCHE GRUNDLAGEN
eine kovariante Komponente von grad Φ in der Basis (~e1 , . . . ~en ). Daraus folgt:
n
X
∂Φ
· ~ej ∈ Vn
∂xj
(A.15)
n
grad Φ =
ün
ch
e
j=1
~n =
-T
U
M
(v) Richtungsableitung entlang einer Kurve:
Die Richtungsableitung am Punkt P in eine Richtung ~n kann man auch dadurch gewinnen,
dass man eine Kurve durch P legt, deren Tangentialvektor in Richtung von ~n weist:
d ~r
dλ
ik
Man wählt eine Parameterdarstellung:
tro
d ~r
(λ0 ) = ~n 6= 0
dλ
ph
ys
R ⊃ (λ1 , λ2 ) 3 λ → ~r(λ) ∈ Vn , mit ~r(λ0 ) = ~r(P ), und λ0 ∈ (λ1 , λ2 )
Dann gilt:
∂Φ d
d ~r
=
Φ(O + ~r(λ))
(λ0 )
= grad Φ ·
∂n P
dλ
d
λ
λ=λ0
P
Te
ch
nis
ch
e
El
ek
(A.16)
Beweis:
λ→λ0
= lim
λ − λ0
·
|~r(λ) − ~r(λ0 )|
lim
λ→λ0
Φ(O + ~r(λ)) − Φ(O + ~r(λ0 ))
λ − λ0
uh
l
λ→λ0
Φ(O + ~r(λ)) − Φ(O + ~r(λ0 )) − d fP (~r(λ) − ~r(λ0 ))
|~r(λ) − ~r(λ0 )|
für
0 = lim
− lim d fP
λ→λ0
c
Le
hr
st
"
#
1
d
~
r
(λ)
−
~
r
(λ
)
0
=
− d fP lim
~r(λ)−~r(λ0 ) · d λ Φ(O + ~r(λ))
λ→λ0
λ − λ0
λ=λ0
limλ→λ0 λ−λ0
1
= d ~r (λ0 )
d λ
| {z }
d
d ~r
·
Φ(O + ~r(λ))
− d fP ·
(λ0 )
d
λ
d λ
λ=λ0
|
{z
}
=0
6=0
74
(~r(λ) − ~r(λ0 )
λ − λ0
A MATHEMATISCHE GRUNDLAGEN
A.3 Totale Ableitung und Gradient
∂Φ
∂~
r
kann man sich Gleichung (A.16) als »Kettenregel«
ün
Mit Hilfe der Schreibweise grad Φ =
merken.
ch
e
d
d ~r
d ~r
∂Φ Φ(O + ~r(λ))
= d fP ·
(λ0 ) = grad ΦP ·
(λ0 ) = grad ΦP · ~n =
dλ
dλ
dλ
∂n P
λ=λ0
d
∂Φ d ~r
Φ̃(~r(λ)) =
·
dλ
∂~r d λ
∂x1
dλ
M
n
X
∂Φ d xj
·
=
∂xj d λ
j=1
ph
ys
. .
d
Φ̃(~r(λ)) = . · .
dλ
. .
-T
U
∂Φ d x1
(A.17)
ik
In kartesischen Koordinaten also als:
d xn
dλ
tro
∂Φ
∂xn
Andere Schreibweise:
n
also:
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
~
~ = ~e1 ∂ + ~e2 ∂ + . . . + ~en ∂
grad Φ = ∇Φ,
mit ∇
∂x1
∂x2
∂xn
75
A.4 Krummlinige Koordinaten
A MATHEMATISCHE GRUNDLAGEN
A.4. Krummlinige Koordinaten
n
A.4.1. Begleitendes n-Bein
ch
e
(i) Jedem Punkt P ⊂ En wird bijektiv der Koordinatensatz
(u1 (P ), u2 (P ), . . . , un (P )) ∈ |{z}
G ⊂ Rn
zugewiesen:
Dies induziert eine Darstellung des Ortsvektors
P (u1 , . . . , un ) = O + ~r(u1 (P ), . . . , un (P )).
ik
Die Kurvenscharen
-T
U
G 3 (u1 , u2 , . . . , un ) 7→ P (u1 , u2 , . . . , un ) ∈ En “Karte”
M
ün
“Gebiet”
ph
ys
uj 7→ P (u1 , . . . , uj , . . . , un ) bzw. uj 7→ ~r(u1 , . . . , uj , . . . , un )
tro
heißen »Koordinatenlinien«.
ek
Speziell für kartesische Koordinatensysteme ergibt sich:
Damit die Kartendarstellung
ch
e
(Anmerkung: in einer ONB gilt xi = xi )
El
xj → ~r(x1 , . . . , xj , . . . , xn ) = 0 + x1~e1 + . . . + xj ~ej + . . . + xn~en .
Te
ch
nis
G 3 (u1 , . . . , un ) → P (u) ∈ En
ein n-dimensionales Teilgebiet im En aufspannt, müssen die entsprechenden n Tangentialvektoren
~bj (P ) = ∂~r , mit j = 1, . . . n
(A.18)
∂uj P
uh
l
für
an jedem Punkt P des von der Karte abgedeckten Gebiets in En eine Basis von Vn bilden. Diese ortsabhängige Basis (b1 (P ), b2 (P ), . . . bn (P )) heißt »begleitendes n-Bein«. (vgl.
Abschn. A.1.6)
hr
st
(ii) Bildet
(~b1 (P ), . . . ~bn (P ))
c
Le
ein Orthonormalsystem, dann ist
(~eu1 (P ), . . . ~eun (P ))
mit
~euj (P ) =
1
|~bj (P )|
· ~bj (P )
eine »begleitende Orthonormalbasis«. (u1 , . . . , un ) heißen dann orthonormale Koordinaten,
und können somit auch (u1 , . . . , un ) geschrieben werden.
76
A MATHEMATISCHE GRUNDLAGEN
A.4 Krummlinige Koordinaten
(iii) Die Funktionen P 7→ uj (P ) sind Skalarfelder auf En mit der Eigenschaft
ch
e
n
∂ui
= δ ij = δij ,
∂uj
weil
ün
(u1 , . . . , un ) 7→ P (u1 , . . . , un ) 7→ u1 (P (u)), ..., un (P (u))
∂ui
∂ui ∂~r
∂~r
i
=
=
grad
u
·
·
∂uj
∂uj
∂~r ∂uj
|{z}
(suggeriert die Kettenregel)
-T
U
δij =
M
ist die Identität. Dies sind aber die Richtungsableitungen von ui in Richtung der Koordinatenlinien uj → ~r(u1 , . . . , uj , . . . , un ), nach Gleichung (A.16)) gilt daher:
~bj (P )
ph
ys
ik
d.h. die zur kontravarianten Basis (~b1 (P ), . . . ~bn (P )) gehörende kovariante (bzw. duale, oder
reziproke) Basis, ist nach Abschnitt A.3.1-Nr.3, durch
j
~bj (P ) = ~b∗ (P ) = ∂u
j
∂~r
(A.19)
El
ek
tro
gegeben.
(= grad uj ) (j = 1, . . . n)
ch
e
A.4.2. Gradient in krummlinigen Koordinaten
Te
ch
nis
(i) Nach Definition im Abschnitt A.3.2Punkt2 gilt:
~ ∗ (P ) = grad Φ
dΦ
Nach Gleichung (A.6) hat der Linearform d Φ (totales Differential) kanonisch-isomorph zugeordnete Vektor ~dΦ∗ die kovariante Darstellung:
n
X
n X
~j
∂Φ
∂uj
uh
l
für
∂~
r
∂uj
~d Φ =
grad Φ(P ) · j d Φ(~bj (P ))b (P ) =
·
∂u P
∂~r
j=1 |
j=1
{z
}
∗
c
Le
hr
st
Daraus ergibt sich nachfolgende Gleichung:
Dabei ist
grad Φ =
n
X
∂Φ ~ j
·b
∂uj
j=1
∂Φ
= ∂j Φ
uj
die Richtungsableitung von Φ längs der uj - Koordinatenlinie. d.h.
∂Φ
= ∂j Φ
uj
77
(A.20)
A.4 Krummlinige Koordinaten
A MATHEMATISCHE GRUNDLAGEN
sind die kovarianten Komponenten von grad Φ:
∂j Φ ·
ch
e
j=1
∂uj
∂~r
n
n
X
grad Φ =
n
X
∂Φ ji ~
· g · bi
∂uj | {z }
i,j=1
∂Φ
i=1 ∂uj
=~bj
· g ji sind die kontravarianten Komponenten von grad Φ.
g ij =
1
δij
gii
tro
Für den Inversen metrischen Tensor gilt
ph
ys
gij = h~bj |~bj i = gii δij
ik
Spezialfall: Orthogonale Koordinaten
Der metrische Tensor ist hier eine Diagonalmatrix und es gilt
-T
U
Pn
(A.21)
M
grad Φ =
Damit sind
ün
(ii) Kontravariante Darstellung: (nach Abschnitt A.3.1)
El
ek
√
Zumeist wird mit normierten Basisvektoren gearbeitet. Für diese gilt wegen |~bi | = gii :
ch
e
1
~euj = √
· ~bj
gjj
Daraus ergibt sich:
Te
ch
nis
n
X
grad Φ =
=
i=1
n
X
i,j=1
n
X
j=1
∂Φ ~
· bi
∂uj
(A.22)
1
∂Φ
δij · j · ~bi
gii
∂u
1 ∂Φ ~
·
· bj
gjj ∂uj
n
n
X
X
1
∂Φ
1 ∂Φ √
=
· j · gjj · ~euj =
· j · ~euj
√
gjj ∂u
gjj ∂u
j=1
j=1
c
Le
hr
st
uh
l
für
=
g ij ·
78
(A.23)
A MATHEMATISCHE GRUNDLAGEN
A.5 Gradientenfelder und Potentialfunktionen
A.5. Gradientenfelder und Potentialfunktionen
ün
ch
e
n
~ ) auf E3 heißt Gradientenfeld, wenn eine skalare “Potential(i) Def. Ein Vektorfeld P 7→ E(P
funktion” P 7→ Φ(P ) existiert, mit der Eigenschaft
∂Φ
~
.
(A.24)
E = − grad Φ = −∇Φ = −
∂~r
-T
U
M
~
Φ heißt “Potentialfunktion zu E”.
ik
(ii) Φ(~r) ist nur bis auf eine additive Konstante c eindeutig bestimmt, denn Φ(~r) und Φ̂(~r) =
~
Φ(~r) + c, c ∈ R liefern dasselbe Vektorfeld E:
ph
ys
grad Φ̂ = grad Φ + grad c = ∇Φ
| {z }
=0
Notwendige Bedingung:
~ =
E
und
3
X
Ej ~ej
⇒ Ej = −
j=1
∂Φ
∂xj
ch
e
j=1
El
3
X
∂Φ
∇Φ =
~ej
∂xj
ek
tro
(iii) Kriterium für die Existenz einer Potentialfunktion:
~ ein Gradientenfeld, d.h. E
~ = −∇Φ. In kartesischen Koordinaten (O, ~e1 , ~e2 , ~e3 ) mit den
Sei E
Komponenten (x1 , x2 , x3 ) hat man
Te
ch
nis
∂Eβ
∂Eα
∂2Φ
∂2Φ
=−
=−
=
∂xβ
∂xβ ∂xα
∂xα ∂xβ
∂xα
für
Daraus folgt die sogenannte »Integrabilitätsbedingung«: (im R3 ergeben sich damit drei
Gleichungen)
∂Eβ
∂Eα
=
(A.25)
∂xβ
∂xα
c
Le
hr
st
uh
l
~ eingeführt. Dessen kartesische KomponenSpäter wird die Rotation eines Vektorfeldes rot E
ten lauten:
~e , ~e , ~e y
z
x
∂E
∂E
∂E
∂E
∂E
∂E
y
y
z
x
z
x
~ = ∂x , ∂y , ∂z =
rot E
−
· ~ex +
−
· ~ey +
−
· ~ez
∂y
∂z
∂z
∂x
∂x
∂y
Ex , Ey , Ez Damit ist Gleichung (A.25) äquivalent zu
~ =0
rot E
Andere Schreibweise:
~ = curl E
~ = rot E
~
∇×E
Es gibt auch die Umkehrung:
79
(A.26)
A.5 Gradientenfelder und Potentialfunktionen
A MATHEMATISCHE GRUNDLAGEN
~ : Ω → V3 ein Vektorfeld auf einem einfach zusammenhängenden Gebiet Ω ⊂ E3 mit
Sei E
n
∂Ej
∂Ei
=
∂xi
∂xj
|
{z
}
in kart. Koord.
⇔
ch
e
~
rot
{z= 0}
| E
allg. gültig
mit
~ = −∇Φ.
E
M
Φ:Ω→R
ün
so existiert eine Potentialfunktion
-T
U
Φ ist bis auf eine additive Konstante eindeutig bestimmt.
(iv) Berechnung einer Potentialfunktion:
ik
~ r) mit der Eigenschaft rot E
~ =0
• gegeben: E(~
ph
ys
~ = −∇Φ
• gesucht: Φ(~r) mit E
tro
Wähle einen festen “Bezugspunkt” P0 ∈ E3 , P0 = O + ~r0 , und verbinde ihn mit einem beliebigen Punkt P = O + ~r durch eine (stückweise) glatte Kurve C(P0 , P ). Parametrisierung:
ek
r0
~r(λ1 ) = ~r
El
~r(λ0 ) = ~r0 ;
+
(λ0 , λ1 ) 3 λ 7→ ~r(λ) ∈ V3
ˆ
Te
ch
nis
ch
e
Dann gilt :
+
ˆ
~ d ~r =
E
C(P0 ,P )
λ1
λ0
ˆ
~ r(λ)) · d ~r (λ) d λ =
E(~
dλ
λ1
λ1
−
λ0
∂Φ d ~r
·
dλ
∂~r d λ
d Φ(~r(λ))
d λ = −Φ(~r(λ1 )) + Φ(~r(λ0 ))
| {z }
| {z }
dλ
=−
für
ˆ
λ0
~
r1
~
r0
ˆ
ˆ
~ d ~r = Φ(~r0 ) −
E
Φ(~r) = Φ(~r0 ) −
C(P0 ,P )
P
~ d ~r
E
(A.27)
P0
c
Le
hr
st
uh
l
Fazit, mit Übergang ~r1 → ~r und P1 → P :
NB : Offenkundig ist bei Gleichung (A.27) das Ergebnis unabhängig von der Wahl des Weges,
wenn Ω einfach zusammenhängend ist.
NB : Φ(~r0 ) ist die additive Konstante, über die das Potential Φ an einen Referenzpunkt
(“Masse”, “Ground”, “Erde”) geeicht werden kann.
80
A MATHEMATISCHE GRUNDLAGEN
A.5 Gradientenfelder und Potentialfunktionen
(v) Äquivalente Charakterisierungen von Gradientenfeldern:
Folgende Aussagen sind äquivalent, und drücken das “Grundgesetz der Elektrostatik” aus:
ch
e
n
~ =0
rot E
P
⇔
~ d ~r ist wegunabhängig (E
~ ist konservativ)
E
P0
-T
U
˛
M
ˆ
ün
~ ist ein Gradientenfeld, d.h. ∃Φ : E
~ = −∇Φ
⇔ E
~ d ~r = 0, für jede geschlossene Kurve C
E
⇔
ph
ys
ik
C
El
ek
tro
(vi) Der Gradient steht stets senkrecht auf allen Tangenten an die Äquipotentialfläche und
somit parallel zur Oberfächennormalen.
Sei ~tP ∈ TP ein Tangentialvektor der Tangentialebene TP an die Äquipotentialfläche Πc =
{P 0 ∈ E3 |Φ(P 0 ) = c} am Punkt P ∈ Πc . Lege eine Kurve durch P , die vollständig in Πc liegt
und deren Tangentialvektor in Richtung von ~tp weist:
ch
e
C : λ 7→ ~r(λ),
−−→
~r(λ0 ) = OP ,
d ~r
(λ0 ) ~tP .
dλ
Te
ch
nis
Nach Gleichung (A.16) erhält man:
d ~r
d Φ(~r(λ)) (λ )
0=
= ∇Φ ·
~ 0
dλ
λ0
P dλ
Daraus folgt:
∇Φ ⊥ ~tP
für
P
c
Le
hr
st
uh
l
~
~ immer senkrecht zu den ÄquiDa das statische E-Feld
ein Gradientenfeld ist, steht also E
potentialflächen, d.h. die Feldlinien schneiden die Äquipotentialflächen immer im rechten
Winkel.
81
A.6 Flächenintegrale im E3
A MATHEMATISCHE GRUNDLAGEN
A.6. Flächenintegrale im E3
Raumwinkel im E2 (= R2 )
ch
e
ds
r (ϕ )
+
(
ph
ys
ik
dϕ
-T
U
M
ün
er
N
ϑ
r (ϕ + dϕ )
n
ϑ = (N , r )
tro
Abb. 29: Raumwinkel im E2 (= R2 )
ek
ebener Winkel:
~ ds
~
d se cosϑ d s
~er · N
~r · N
=
=
= 2 ds
r
r
r
r
El
dϕ =
ch
e
es gilt also
Te
ch
nis
ˆ2π
⇒
2π =
ˆ
dϕ =
0
~
~r · N
ds ,
2
r
C
wenn der Ursprung im inneren von C liegt (sonst: 0). Allgemein:
ˆ
für
O 7→ P0 , r = |~r − ~r0 | ⇒
~r − ~r0
~ ds =
·N
|~r − ~r0 |2
C
(
2π
⇐ P0 innerhalb C
0
⇐ P0 außerhalb C
c
Le
hr
st
uh
l
Raumwinkel im E3 (= R3 )
+
Abb. 30: Raumwinkel im E3 (= R3 )
82
A.6 Flächenintegrale im E3
A MATHEMATISCHE GRUNDLAGEN
es gilt1 :
n
˜
~) · da
d ~a
cos ](~er , N
=
r2
r2
~er d a
~r d ~a
(~r − ~r0 ) d ~a
=
= 3 =
2
r
r
|~r − ~r0 |3
4π ⇐ P0 ∈ V \ ∂V
0 ⇐
P0 ∈
/V
∂V
Das ist aber genau die Aussage von Gleichung 1.18
~ einer Punktladung ∼
D
1
|~
r−~
r0 |2
⇔
Coulombkraft!
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
tro
ph
ys
ik
⇔
ün
(
M
~r − ~r0
d ~a =
|~r − ~r0 |3
-T
U
ˆ
ch
e
dΩ =
1
d Ω: Differentieller Raumwinkel, gemessen in sterad; d ã: an Kugeloberfläche genähertes Oberflächenelement
83
A.7 Divergenz eines Vektorfeldes im E3
A MATHEMATISCHE GRUNDLAGEN
A.7. Divergenz eines Vektorfeldes im E3
M
ün
ch
e
~ :Ω→V
~3 ein Vektorfeld, P = O + ~r ⊂ Ω Aufpunkt, V (~r) eine Schar
Sei Ω ⊂ E3 ein Gebiet und U
~ besitzt bei P eine Divergenz, wenn der Limes
von Kontrollvolumina mit P ∈ V (~r) ⊂ K(P, ). U
ˆ
1
~
~ d ~a
div U (~r) = lim
U
(A.28)
→0 |V(~
r) |
n
A.7.1. Divergenzoperator
∂V (~
r)
-T
U
existiert.
Te
ch
nis
+
ch
e
El
ek
tro
ph
ys
A.7.2. Darstellung der Divergenz in kartesischen Koordinaten
ik
~ am Ort P = O + ~r ist die “Lokale Ergiebigkeit von U
~”
Die Divergenz von U
Abb. 31: Divergenz in kartesischen Koordinaten
hr
st
uh
l
für
Man betrachtet einen Würfel W (~r) mit dem Mittelpunkt P = O + ~r und den Kantenlängen ∆x,
∆y, ∆z.
−
+
−
−
+
Die 6 Seitenflächen werden mit A+
x , Ay , Az , bzw. Ax , Ay , Az bezeichnet.
~ durch die Berandung des Würfels ∂W (~r) gilt:
Für den Fluß eines Vektorfeldes U
!
ˆ
ˆ
X ˆ
~ d ~a =
~ · ~eα d a −
~ · ~eα · d a
U
U
U
mit α ∈ {x, y, z}
α
∂W (~
r)
Le
A+
x
ˆ
≈
Ux (x +
Āx
≈
Aα−
ˆ
z.B.: α = x:
c
Aα+
ˆ
Ux d y d z −
A−
x
Ux d y d z
∆x
∆x
∂Ux
, y, z) − Ux (x −
, y, z)∆x∆y '
(x, y, z)∆x∆y∆z
2
2
∂x
∂Ux
(x, y, z)∆x∆y∆z
∂x
84
A.7 Divergenz eines Vektorfeldes im E3
A MATHEMATISCHE GRUNDLAGEN
X ∂Uα
∂xα
α
∂W (~
r)
(~
α)∆x∆y∆z
n
=
ch
e
Analog für α = y und α = z:
ˆ
α
∂W (~
r)
Fazit:
X ∂Uα
∂xα
ik
tro
V sei ein geschlossenes Kontrollvolumen mit der
~ (~r) sei ein stetig differenHüllfläche ∂V , und U
zierbares Vektorfeld. Dann gilt:
ˆ
~ d ~a
U
(A.30)
ek
V
(A.29)
ph
ys
A.7.3. Integralsatz von Gauß
~ d3 r =
div U
mit α ∈ {x, y, z}
(~r)
∂Ux ∂Uy
∂Uz
+
+
∂x
∂y
∂z
~ =
div U
ˆ
M
~ d ~a =
U
-T
U
ˆ
1
div U (~r) = lim
→0 ∆x∆y∆z
ün
∂Uy
∂Ux
∂Uz
=
(~r) +
(~r) +
(~r) · ∆x∆y∆z
∂x
∂y
∂z
∂V
ˆ
Te
ch
nis
ch
e
El
Hinter dieser Gleichung steht der Hauptsatz der Differtial- und Integralrechnung, bzw. dessen
Verallgemeinerung auf Rn .
Beweisidee:
Man zerlegt V in kleine Zellen W (~rj ) mit
~ d3 r =
div U
V
für
j=1
uh
l
hr
st
Le
N
X
j=1
W (~rj )
j=1
N ˆ
X
(siehe: A.28) ≈
c
V =
N
]
~ d3 r ≈
div U
W (~
rj )
1
|W (~rj )|
N
X
~ (~rj )|W (~rj )|
div U
j=1
ˆ
∂W (~
rj )
j=1
ˆ
=
N ˆ
X
~ d ~a|W (~rj )| =
U
X
ˆ
~ d ~a =
U
äußere
Randfächenstücke
Im Limes N → ∞, |W (~rj )| → 0 gilt überall »=«.
85
A(~
rj )
∂W (~
rj )
~ d ~a
U
∂V
~ d ~a
U
A.7 Divergenz eines Vektorfeldes im E3
A MATHEMATISCHE GRUNDLAGEN
A.7.4. Divergenzoperator in krummlinigen Koordinaten
n
(i) Duale Basis im V3 : Sei (~b1 , ~b2 , ~b3 ) eine positiv orientierte Basis (Rechtssystem)
~b2 = √1 (~b3 × ~b1 ) ;
g
~b3 = √1 (~b1 × ~b2 )
g
ün
~b1 = √1 (~b2 × ~b3 ) ;
g
ch
e
Es gilt:
M
wobei
-T
U
g = det(gij ) = det(~bi · ~bj )
Allgemein:
ijk = sgn(i, j, k) Vorzeichen der Permutation
ph
ys
ik
ijk ~
~bk = √
(bi × ~bj );
g
⇒
∃ ~b3 = k 3 (~b1 × ~b2 )
k3 ∈R
El
~b3 · ~b1 = ~b3 · ~b2 =! 0
ek
D
E
Mit ~bi |~bj = ~bi · ~bj = δij gilt
tro
Beweis:
Da
Te
ch
nis
ch
e
!
1 = ~b3 · ~b3 = k 3 (~b1 × ~b2 ) · ~b3 = k 3 ·
= k3
det(~b1 , ~b2 , ~b3 )
{z
}
|
> 0 da
rechtsorientiert
=
√
det(~bi · ~bj ) = k 3 g
q
1
k3 = √
g
⇒
für
(Allgemein: det(~a1 , . . . , ~an ) · det(~b1 , . . . , ~bn ) = det(~ai · ~bj )
hr
st
uh
l
(ii) Sei G 3 (u1 , u2 , u3 ) 7→ P (u1 , u2 , u3 ) ∈ E3 eine Kartenabbildung und P0 = P (u0 ) =
P (u10 , u2o , u30 ) der zentrale Punkt eines »verbogenen Quaders« Q(P0 ), der sich als Bild eines rechtwinkligen Quaders R(u0 ) um u0 in G ergibt (vergleiche A.7.2)
Die 6 Seitenflächen haben die Parameterdarstellungen:
c
Le
(u1 , u2 ) 7→ P (u1 , u2 , u30 ±
(u1 , u3 ) 7→ P (u1 , u20 ±
(u2 , u3 ) 7→ P (u10 ±
∆u3
);
2
∆u2 3
, u );
2
∆u2 2 3
, u , u );
2
∂~r
∂~r
√
×
du1 du2 = ±~b1 × ~b2 du1 du2 = ± g~b3 du1 du2
∂u1 ∂u2
∂~r
∂~r
√
d~a = ± 1 × 3 du1 du3 = ±~b1 × ~b3 du1 du3 = ± g~b2 du1 du3
∂u
∂u
∂~r
∂~r
√
d~a = ± 2 × 3 du2 du3 = ±~b2 × ~b3 du2 du3 = ± g~b1 du2 du3
∂u
∂u
d~a = ±
86
A.7 Divergenz eines Vektorfeldes im E3
A MATHEMATISCHE GRUNDLAGEN
P
Sei F~ = F~ (~r) = 3j=1 F j (u1 , u2 , u3 )~bj (u1 , u2 , u3 ) ein Vektorfeld.
~ · ~b2 √gdu1 du3 −
F
| {z
}
+
F2
A+
2
ˆ
A−
2
~ · ~b3 √gdu1 du2 −
F
| {z
}
+
F3
ˆ
A−
3
F1
~ · ~b2 √gdu1 du3
F
}
| {z
F2
~ · ~b3 √gdu1 du2
F
| {z
}
F3
-T
U
A+
3
ˆ
n
ˆ
A−
1
~ · ~b1 √gdu2 du3
F
}
| {z
ch
e
F1
A+
1
∂Q
ˆ
ün
~ · ~b1 √gdu2 du3 −
F
| {z
}
F~ · d~a =
M
ˆ
ˆ
ik
Wie in A.7.2 erhält man im Kartenraum (u1 , u2 , u3 )
ˆ
∂ √ 1
∂ √ 2
∂ √ 3
~
F · d~a =
( gF ) + 2 ( gF ) + 3 ( gF ) ∆u1 ∆u2 ∆u3
∂u1
∂u
∂u
ˆ
R(u0 )
1
i
|Q(P
∆u →0
0 )|
El
div F~ (P0 ) = lim
√
ˆ
g∆u1 ∆u2 ∆u3
3
1 X ∂ √ j
~
F · d~a = √
( gF )
g
∂uj
j=1
∂Q(P0 )
ch
e
Fazit:
gdu1 du2 du3 ≈
ek
Q(P0 )
⇒
√
d3 r =
|Q(P0 )| =
tro
ˆ
weiter ist
ph
ys
∂Q
Te
ch
nis
1
div F~ = √
g
∂ √ 1
∂ √ 2
∂ √ 3
( gF ) + 2 ( gF ) + 3 ( gF )
∂u1
∂u
∂u
(A.31)
(iii) Spezialfall:
bei orthogonalen krummlinigen Koordinaten gilt gij = gii δij .
für
1
~euj = √ ~bj
gjj
c
Le
hr
st
uh
l
bilden eine ONB.
Somit ergeben sich die kartesischen Komponenten des Vektorfeldes F~ durch:
3
X
F j~bj =
j=1
3
X
√
gjj F j ~euj
|
{z }
j=1
Fej
(mit Fej als kartesische Komponenten)
Sei hj :=
√
gjj ⇒
div F~ =
1
h1 h2 h3
∂
∂
∂
e
e
e
(h2 h3 F1 ) + 2 (h1 h3 F2 ) + 3 (h1 h2 F3 )
∂u1
∂u
∂u
87
(A.32)
A.8 Rotation und Satz von Stokes
A MATHEMATISCHE GRUNDLAGEN
A.8. Rotation eines Vektorfeldes im E3 und Satz von Stokes
ch
e
n
A.8.1. Rotationsoperator
-T
U
M
ün
~ : Ω → V3 ein differenzierbares VektorSei Ω ⊂ E3 und U
feld.
Weiter sei P = O + ~r ∈ Ω ein Aufpunkt und A (~r) eine Schar rechtsorientierter, ebener Flächenstücke mit P ∈
~ die Einheitsnormale auf A (~r) und
A (~r) ⊂ K(P, ), N
∂A (~r) die Randkurve.
~ besitzt bei P eine Rotation, wenn für jedes N
~ ∈
U
~ | = 1 der Limes
V 3 , |N
~ d ~r
U
(A.33)
∂A (~
r)
tro
existiert.
uh
l
für
Te
ch
nis
ch
e
El
ek
~ ist ein Vektorfeld E3 ⊃ Ω → V3 .
rot U
~ (~r)«)
(»lokale Zirkulation des Vektorfeldes U
~
Deutsche Schreibweise: rot U
~
Amerikanische Schreibweise: curl U
hr
st
A.8.2. Integralsatz von Stokes
c
Le
Sei A ein orientierbares Flächenstück in E3 mit positiv ori~ (~r) ein differenzierbares Vekentierter Randkurve ∂A und U
torfeld. Dann gilt:
ˆ
ˆ
~ d ~a =
rot U
A
ik
ˆ
ph
ys
1
→0 |A (~
r)|
~ · rot U
~ (~r) := lim
N
~ d ~r
U
(A.34)
∂A
88
A MATHEMATISCHE GRUNDLAGEN
A.8 Rotation und Satz von Stokes
Beweisidee:
j=1
≈
n
X
ch
e
A
n ˆ
X
~ · d ~a ≈
rot U
A(~
rj )
ün
~ d ~a =
rot U
rj ):
j=1 A(~
~ (~rj ) · N
~ · A(~rj ) ≈
rot U
M
ˆ
Un
n
Wir zerlegen A in kleine Zellen A(~rj ) mit A =
j=1
ˆ
n
X
ˆ
X
~ d ~r =
U
j=1
∂A(~
rj )
ik
C(~
rj )
ph
ys
~ d ~r
U
=
~ d ~r =
U
äußere
Randstücke
ˆ
-T
U
≈
∂A
c
Le
hr
st
uh
l
für
Te
ch
nis
ch
e
El
ek
tro
Im Limes |A(~rj )| → 0, n → ∞ gilt überall »=«.
(siehe auch Großmann: Kapitel 6.6 oder Bourne, Kendall: Kapitel 6.4)
89
A.8 Rotation und Satz von Stokes
A MATHEMATISCHE GRUNDLAGEN
A.8.3. Darstellung der Rotation in kartesischen Koordinaten
-T
U
M
ün
ch
e
n
~ = ~ez ,
Wähle ~r als Mittelpunkt eines Quadrats Aε (~r), o.B.d.A. N
mit den Kantenlängen ∆x, ∆y, |∆x| < ε, |∆y| < ε
und den 4 Kanten Cx+ , Cx− , Cy+ , Cy−
ˆ
~ ex dx0 −
U~
Cx−
x+ ∆x
2
ˆ
Ux (x0 , y −
=
Cy+
∆y
, z)dx0 −
2
ˆ
+
~ ey dy 0
U~
Cy−
x+ ∆x
2
ˆ
∆y
, z)dx0
2
Ux (x0 , y +
x− ∆x
2
ch
e
x− ∆x
2
y+ ∆y
2
ˆ
~ ey dy 0 −
U~
ek
Cx+
∂Aε (~
r)
ˆ
~ ex dx0 +
U~
tro
ˆ
~ d ~r =
U
El
ˆ
ph
ys
ik
ex
∆x 0
Uy (x +
, y , z)dy 0 −
2
ˆ
Uy (x −
∆x 0
, y , z)dy 0
2
y− ∆y
2
Te
ch
nis
y− ∆y
2
y+ ∆y
2
∆y
∆y
≈ Ux (x, y −
, z) − Ux (x, y +
, z) ∆x
2
2
∆x
∆x
+ Uy (x +
, y, z) − Uy (x −
, y, z) ∆y
2
2
∂Uy
∂Ux
(x, y, z)∆y∆x +
(x, y, z)∆x∆y
≈−
∂y
∂x
uh
l
für
~ d ~r = ∂Uy (~r) − ∂Ux (~r)
U
∂x
∂y
∂Aε (~
r)
hr
st
=⇒
ˆ
1
ε→0 ∆x∆y
~ (~r) = lim
~ez · rotU
c
Le
~ (~r) gewinnt man durch zyklische Vertauschung von (x, y, z).
Die x- und y-Komponente von rotU
Ergebnis:
~ =
rotU
∂Uy
∂Uz
−
∂y
∂z
~ex +
∂Ux ∂Uz
−
∂z
∂x
90
~ey +
∂Uy
∂Ux
−
∂x
∂y
~ez
(A.35)